JP2006075257A - 椅子 - Google Patents
椅子 Download PDFInfo
- Publication number
- JP2006075257A JP2006075257A JP2004260510A JP2004260510A JP2006075257A JP 2006075257 A JP2006075257 A JP 2006075257A JP 2004260510 A JP2004260510 A JP 2004260510A JP 2004260510 A JP2004260510 A JP 2004260510A JP 2006075257 A JP2006075257 A JP 2006075257A
- Authority
- JP
- Japan
- Prior art keywords
- lumbar
- support
- pelvis
- chair
- support portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 210000004197 pelvis Anatomy 0.000 claims abstract description 136
- 210000000689 upper leg Anatomy 0.000 claims abstract description 27
- 210000001217 buttock Anatomy 0.000 claims abstract description 13
- 230000004224 protection Effects 0.000 claims description 41
- 230000033001 locomotion Effects 0.000 claims description 33
- 210000002414 leg Anatomy 0.000 claims description 30
- 210000001624 hip Anatomy 0.000 claims description 27
- 230000001105 regulatory effect Effects 0.000 claims description 17
- 230000001681 protective effect Effects 0.000 claims description 14
- 230000002829 reductive effect Effects 0.000 claims description 7
- 210000003127 knee Anatomy 0.000 claims description 4
- 210000004705 lumbosacral region Anatomy 0.000 claims description 4
- 230000001276 controlling effect Effects 0.000 claims description 3
- 208000008035 Back Pain Diseases 0.000 abstract description 6
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 abstract description 4
- 230000003387 muscular Effects 0.000 abstract description 3
- 208000035475 disorder Diseases 0.000 abstract 2
- 230000007423 decrease Effects 0.000 abstract 1
- 210000004013 groin Anatomy 0.000 abstract 1
- 210000000038 chest Anatomy 0.000 description 86
- 230000036544 posture Effects 0.000 description 57
- 238000010586 diagram Methods 0.000 description 38
- 230000007246 mechanism Effects 0.000 description 31
- 238000004804 winding Methods 0.000 description 21
- 238000005452 bending Methods 0.000 description 12
- 230000037237 body shape Effects 0.000 description 11
- 230000008602 contraction Effects 0.000 description 11
- 210000003205 muscle Anatomy 0.000 description 9
- 208000027418 Wounds and injury Diseases 0.000 description 8
- 230000008859 change Effects 0.000 description 8
- 239000000463 material Substances 0.000 description 8
- 230000006866 deterioration Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 7
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 6
- 210000000115 thoracic cavity Anatomy 0.000 description 6
- 230000007704 transition Effects 0.000 description 6
- 210000000078 claw Anatomy 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 206010049565 Muscle fatigue Diseases 0.000 description 4
- 238000013459 approach Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 239000003814 drug Substances 0.000 description 3
- 239000006260 foam Substances 0.000 description 3
- 239000007788 liquid Substances 0.000 description 3
- 230000007774 longterm Effects 0.000 description 3
- 230000002265 prevention Effects 0.000 description 3
- 230000003449 preventive effect Effects 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- KAKZBPTYRLMSJV-UHFFFAOYSA-N Butadiene Chemical compound C=CC=C KAKZBPTYRLMSJV-UHFFFAOYSA-N 0.000 description 2
- RRHGJUQNOFWUDK-UHFFFAOYSA-N Isoprene Chemical compound CC(=C)C=C RRHGJUQNOFWUDK-UHFFFAOYSA-N 0.000 description 2
- 208000028389 Nerve injury Diseases 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 210000000988 bone and bone Anatomy 0.000 description 2
- 210000003679 cervix uteri Anatomy 0.000 description 2
- 210000003792 cranial nerve Anatomy 0.000 description 2
- 238000013500 data storage Methods 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 238000007667 floating Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 230000002650 habitual effect Effects 0.000 description 2
- 239000012948 isocyanate Substances 0.000 description 2
- 150000002513 isocyanates Chemical class 0.000 description 2
- 235000013372 meat Nutrition 0.000 description 2
- 230000003340 mental effect Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000008764 nerve damage Effects 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 229920005862 polyol Polymers 0.000 description 2
- 150000003077 polyols Chemical class 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 239000005060 rubber Substances 0.000 description 2
- 210000001519 tissue Anatomy 0.000 description 2
- 210000003371 toe Anatomy 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 206010061218 Inflammation Diseases 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 208000008930 Low Back Pain Diseases 0.000 description 1
- 208000002193 Pain Diseases 0.000 description 1
- 241000270295 Serpentes Species 0.000 description 1
- 229910000639 Spring steel Inorganic materials 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 244000309466 calf Species 0.000 description 1
- 230000004087 circulation Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000006806 disease prevention Effects 0.000 description 1
- 230000009429 distress Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 238000005187 foaming Methods 0.000 description 1
- 230000009760 functional impairment Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000009477 glass transition Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 210000001621 ilium bone Anatomy 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000004054 inflammatory process Effects 0.000 description 1
- 210000001503 joint Anatomy 0.000 description 1
- 210000000281 joint capsule Anatomy 0.000 description 1
- 210000003041 ligament Anatomy 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 210000005036 nerve Anatomy 0.000 description 1
- 208000015122 neurodegenerative disease Diseases 0.000 description 1
- 210000000103 occipital bone Anatomy 0.000 description 1
- 230000035479 physiological effects, processes and functions Effects 0.000 description 1
- 229920001225 polyester resin Polymers 0.000 description 1
- 238000006116 polymerization reaction Methods 0.000 description 1
- 229920005672 polyolefin resin Polymers 0.000 description 1
- 230000001144 postural effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000008707 rearrangement Effects 0.000 description 1
- 210000000323 shoulder joint Anatomy 0.000 description 1
- 210000003625 skull Anatomy 0.000 description 1
- 230000035882 stress Effects 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
- 210000000331 sympathetic ganglia Anatomy 0.000 description 1
- 229920003051 synthetic elastomer Polymers 0.000 description 1
- 239000005061 synthetic rubber Substances 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
- 238000003079 width control Methods 0.000 description 1
Images































































Abstract
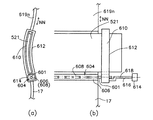
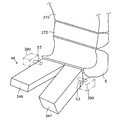
【解決手段】 着座した人の大腿部を支える座部と、胸背部を支え傾斜可能な胸背支持部と、腰椎部を支える腰椎支持部と、骨盤部を支える骨盤支持部と、大腿部の付け根のがわを支え前記胸背支持部の傾斜に伴って丈方向に長さが縮む臀部−大腿基部支持部と頚椎を支える頚椎支持部とを備えを備え、前記腰椎支持部の下端部と前記骨盤支持部の上端部とが互いに回動可能に連結され、回動中心の位置が、該胸背支持部が傾くにつれて下降し、前記腰椎支持部が丈方向に伸縮可能で、該頚椎支持部の下端部と前記胸背支持部の上端部とが互いに回動可能に連結され、前記頚椎支持部が丈方向に伸縮可能な椅子である。
【選択図】 図6(a)
Description
各該アクチュエータの作動量に対応の値を入力する入力部、
各該アクチュエータの作動を制御する制御部、
各該アクチュエータを駆動する駆動回路、
各該値を入力する入力部、及び前記入力部に入力された使用する人や使用目的に対応する前記値を記憶する記憶部
を備え得、記憶された該値の中から指定された値に基き前記制御部、前記駆動回路を介して前記アクチュエータが作動し得る。
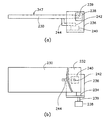
主巻き芯708に巻き取られた簾状シート702の量(長さ)を変えることにより図36(a)から図36(b)への状態とあるいはその逆へと巻き取り巻体700の径を変える。
4:座部
10:人
1xx:後頭支持部
2xx:頚椎支持部
4xx:胸背支持部
5xx、521:腰椎支持部
7xx:骨盤支持部
8xx:臀部−大腿根元部支持部
16:首部保護壁
24:頚椎棘突起部保護壁
32:頭部保護壁
42:肩部保護壁
46:脚載せ台
402:窪み
673:背・腰部規制壁
671:首部規制壁
72x、74x、59、137、161a、161b、238、240、355、390、614、614h、:アクチュエータ
804:胸背部受けシート
807:骨盤部受けシート
Claims (26)
- 着座した人の腰椎部を支え傾斜可能な腰椎支持部と、骨盤部を支える骨盤支持部とを備え、前記腰椎支持部の下端部と前記骨盤支持部の上端部とが互いに回動可能に連結された椅子。
- 着座した人の腰椎部を支え傾斜可能な腰椎支持部と、骨盤部を支える骨盤支持部と、臀部と大腿部の根元を支える臀部−大腿根元部支持部とを備え、前記臀部−大腿根元部支持部が前記腰椎支持部の傾斜に伴って丈方向に長さが縮む椅子。
- 着座した人の腰椎部を支え傾斜可能な腰椎支持部と、骨盤部を支える骨盤支持部と、臀部と大腿部の根元を支える臀部−大腿根元部支持部とを備え、前記腰椎支持部の下端部と前記骨盤支持部の上端部とが互いに回動可能に連結され、前記臀部−大腿根元部支持部が、前記腰椎支持部の傾斜に伴って丈方向に長さが縮む椅子。
- 前記腰椎支持部が傾くにつれて、前記腰椎支持部の下端部と前記骨盤支持部との回動軸心の位置が下降する請求項1又は3に記載の記載の椅子。
- 前記回動軸心の位置が椅子の後方に向けて斜めに下降しその後椅子の前方に向けて斜めに下降する略弧状の軌跡をたどる請求項4に記載の椅子。
- 前記腰椎支持部が傾くにつれて、前記腰椎支持部の下端部と前記骨盤支持部との回動軸心の位置が、椅子の前方に向けて斜めに下降し次いで略鉛直方向に下降する請求項4に記載の椅子。
- 前記腰椎支持部の前記人に面接する面が丈方向に沿って前方に凸に湾曲し、前記腰椎支持部から骨盤支持部の丈方向の中間に至る部分の前記人に面接する面が、丈方向に沿ってS字状に湾曲している請求項1乃至6のいずれかに記載の椅子。
- 前記腰椎支持部が丈方向に伸縮可能である請求項1乃至7のいずれかに記載の椅子。
- 着座した人の頚椎部を支える頚椎支持部と、胸背部を支える胸背支持部とを備える請求項1乃至8のいずれかに記載の椅子。
- 前記頚椎支持部の前記人に面接する面が丈方向に沿って前方に凸に湾曲し、前記頚椎支持部から前記胸背支持部の丈方向の中間に至る部分の前記人に面接する面が、丈方向に沿ってS字状に湾曲している請求項9に記載の椅子。
- 前記頚椎支持部の下端部と前記胸背支持部の上端部とが互いに回動可能に連結された請求項9又は10に記載の椅子。
- 前記頚椎支持部が丈方向に伸縮可能な請求項9乃至11のいずれかに記載の椅子。
- 後頭部を支える後頭支持部を備える請求項9乃至12のいずれかに記載の椅子。
- 前記胸背支持部の傾斜時に、前記頚椎支持部と前記腰椎支持部との間隔が略一定に維持され、前記胸背支持部が胸背部による圧力で可撓な胸背部受けシートを含んでなる請求項9乃至13のいずれかに記載の椅子。
- 前記胸背部受けシートが伸縮性を有する請求項14に記載の椅子。
- 前記胸背支持部の傾斜時に、前記頚椎支持部と前記腰椎支持部との間隔が略一定に維持され、前記骨盤支持部が骨盤部による圧力で可撓な骨盤部受けシートを含んでなる請求項9乃至13のいずれかに記載の椅子。
- 前記骨盤部受けシートが伸縮性を有する請求項16に記載の椅子。
- 前記胸背支持部の傾斜時に、前記頚椎支持部と前記腰椎支持部との間隔が略一定に維持され、前記胸背支持部が胸背部による圧力で可撓な胸背部受けシートを含んでなり、前記骨盤支持部が骨盤部による圧力で可撓な骨盤部受けシートを含んでなる請求項9乃至13のいずれかに記載の椅子。
- 前記胸背部受けシート及び/又は前記骨盤部受けシートが伸縮性を有する請求項18に記載の椅子。
- 首の側面に面接するように配されて該首の左右方向への動きを拘束する首部規制壁を備える請求項1乃至19のいずれかに記載の椅子。
- 胸背部及び骨盤部の側面に面接するように配されて胸背部及び腰椎部の左右方向への動きを拘束する背・腰部規制壁を備える請求項1乃至20のいずれかに記載の椅子。
- 頚椎棘突起部に相当する部分に当接するように配されて該部分の後方への動きを拘束する頚椎棘突起部保護壁及び/又は首の頚椎棘突起部に相当する位置の側面に当接するように配されて首の左右方向への動きを拘束する首部保護壁を備える請求項1乃至21のいずれかに記載の椅子。
- 後頭部の側面に当接又は近接して配されて後頭部の左右方向への動きを拘束する頭部保護壁を備える請求項1乃至22のいずれかに記載の椅子。
- 肩の側面に当接又は近接して配されて肩の左右方向への動きを拘束する肩部保護壁を備える請求項1乃至23のいずれかに記載の椅子。
- 左右の大腿部の少なくとも膝がわそれぞれを支持する一対の脚載せ台を備え、各該脚載せ台が傾斜可能とされた請求項1乃至24のいずれかに記載の椅子。
- 着座した人の大腿部を支持する座部、頚椎を支える頚椎支持部、胸背部を支える胸背支持部、腰椎部を支える腰椎支持部、骨盤部を支える骨盤支持部、臀部と大腿部の根元を支える臀部−大腿根元部支持部から選択されるものを直接又は間接に駆動するアクチュエータ、
各該アクチュエータの作動量に対応の値を入力する入力部、
各該アクチュエータの作動を制御する制御部、
各該アクチュエータを駆動する駆動回路、
各該値を入力する入力部、及び前記入力部に入力された使用する人や使用目的に対応する前記値を記憶する記憶部
を備え、記憶された該値の中から指定された値に基き前記制御部、前記駆動回路を介して前記アクチュエータが作動する請求項1乃至25のいずれかに記載の椅子。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004260510A JP4721254B2 (ja) | 2004-09-08 | 2004-09-08 | 椅子 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004260510A JP4721254B2 (ja) | 2004-09-08 | 2004-09-08 | 椅子 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006075257A true JP2006075257A (ja) | 2006-03-23 |
| JP4721254B2 JP4721254B2 (ja) | 2011-07-13 |
Family
ID=36155206
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004260510A Active JP4721254B2 (ja) | 2004-09-08 | 2004-09-08 | 椅子 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4721254B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007111213A1 (ja) * | 2006-03-28 | 2007-10-04 | Matsushita Electric Works, Ltd. | マッサージ・チェア |
| JP2007307347A (ja) * | 2006-04-20 | 2007-11-29 | Assist:Kk | 自然座位姿勢を誘導する着座装置 |
| JP2008168667A (ja) * | 2007-01-09 | 2008-07-24 | Toyota Motor Corp | 車両用シート装置 |
| JP2014525303A (ja) * | 2011-09-03 | 2014-09-29 | ティ キム ローン パム | 脊椎・脊髄疾患を予防及び治療するための矯正椅子 |
| US9131777B2 (en) | 2013-10-25 | 2015-09-15 | Toyota Motor Engineering & Manufacturing North America, Inc. | Variable lumbar support assembly |
| CN113116690A (zh) * | 2021-04-25 | 2021-07-16 | 哈尔滨耀一堂健康科技有限公司 | 一种按摩椅 |
| KR102355901B1 (ko) * | 2021-03-08 | 2022-02-08 | 최종수 | 비강호흡 수면을 유도하기 위한 침대 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101537195B1 (ko) * | 2014-10-23 | 2015-07-15 | 김문석 | 척추 견인용 다기능 의자 |
| NL2028153B1 (en) * | 2021-05-05 | 2022-11-23 | Life & Mobility Dev B V | Backrest and chair |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55158946U (ja) * | 1979-05-01 | 1980-11-15 | ||
| JPH03237903A (ja) * | 1990-02-16 | 1991-10-23 | Mitsubishi Electric Corp | Oaチェア |
| JPH0686720A (ja) * | 1992-07-17 | 1994-03-29 | Itoki Crebio Corp | 椅 子 |
| JPH06133828A (ja) * | 1992-10-21 | 1994-05-17 | Itooki:Kk | 椅子における着座者の背もたれによる支持方法とこの支持方法を用いた椅子 |
| JPH08117051A (ja) * | 1994-10-27 | 1996-05-14 | Eba:Kk | 車両用シート |
| JPH11508209A (ja) * | 1995-06-26 | 1999-07-21 | ピー デラーノ ローランド | 鞭打ち症防止装置 |
| JP2001517514A (ja) * | 1997-09-30 | 2001-10-09 | デュール シート テクノロジーズ インコーポレイテッド | 2つの可動座部を有する椅子 |
| JP2002125794A (ja) * | 2000-10-23 | 2002-05-08 | Mika Sekine | 頭部揺れ防止装置 |
-
2004
- 2004-09-08 JP JP2004260510A patent/JP4721254B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55158946U (ja) * | 1979-05-01 | 1980-11-15 | ||
| JPH03237903A (ja) * | 1990-02-16 | 1991-10-23 | Mitsubishi Electric Corp | Oaチェア |
| JPH0686720A (ja) * | 1992-07-17 | 1994-03-29 | Itoki Crebio Corp | 椅 子 |
| JPH06133828A (ja) * | 1992-10-21 | 1994-05-17 | Itooki:Kk | 椅子における着座者の背もたれによる支持方法とこの支持方法を用いた椅子 |
| JPH08117051A (ja) * | 1994-10-27 | 1996-05-14 | Eba:Kk | 車両用シート |
| JPH11508209A (ja) * | 1995-06-26 | 1999-07-21 | ピー デラーノ ローランド | 鞭打ち症防止装置 |
| JP2001517514A (ja) * | 1997-09-30 | 2001-10-09 | デュール シート テクノロジーズ インコーポレイテッド | 2つの可動座部を有する椅子 |
| JP2002125794A (ja) * | 2000-10-23 | 2002-05-08 | Mika Sekine | 頭部揺れ防止装置 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007111213A1 (ja) * | 2006-03-28 | 2007-10-04 | Matsushita Electric Works, Ltd. | マッサージ・チェア |
| JP2007260176A (ja) * | 2006-03-28 | 2007-10-11 | Matsushita Electric Works Ltd | マッサージ機 |
| JP4670702B2 (ja) * | 2006-03-28 | 2011-04-13 | パナソニック電工株式会社 | マッサージ機 |
| JP2007307347A (ja) * | 2006-04-20 | 2007-11-29 | Assist:Kk | 自然座位姿勢を誘導する着座装置 |
| JP2008168667A (ja) * | 2007-01-09 | 2008-07-24 | Toyota Motor Corp | 車両用シート装置 |
| JP2014525303A (ja) * | 2011-09-03 | 2014-09-29 | ティ キム ローン パム | 脊椎・脊髄疾患を予防及び治療するための矯正椅子 |
| US9131777B2 (en) | 2013-10-25 | 2015-09-15 | Toyota Motor Engineering & Manufacturing North America, Inc. | Variable lumbar support assembly |
| KR102355901B1 (ko) * | 2021-03-08 | 2022-02-08 | 최종수 | 비강호흡 수면을 유도하기 위한 침대 |
| CN113116690A (zh) * | 2021-04-25 | 2021-07-16 | 哈尔滨耀一堂健康科技有限公司 | 一种按摩椅 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4721254B2 (ja) | 2011-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101028369B1 (ko) | 척추보호용 등받이 조절 의자 | |
| CN103251491B (zh) | 限制、再定位、牵引以及运动装置及方法 | |
| KR100322248B1 (ko) | 의자용척추지지시스템 | |
| KR102124863B1 (ko) | 척추 곡률 적응형 인장 장치 및 이를 이용한 척추 인장 방법 | |
| JPH0274429A (ja) | 自動車用シート | |
| CN101287426A (zh) | 躺椅脊柱牵引设备 | |
| JP4721254B2 (ja) | 椅子 | |
| CN107920667A (zh) | 背部支撑件 | |
| JP2006521905A (ja) | 調節可能な支持システムを備えたシート | |
| JP2008178491A (ja) | マッサージ椅子 | |
| CN110074928B (zh) | 一种医疗护理床垫 | |
| KR102166009B1 (ko) | 목 스트레칭 장치 | |
| KR101725227B1 (ko) | 척추 지지 및 견인 장치 | |
| KR100739020B1 (ko) | 요추 견인 치료장치 | |
| KR102098904B1 (ko) | 자세 교정용 의자 | |
| JP2005530530A (ja) | マッサージユニット付き家具 | |
| WO2007027573A2 (en) | Lumbar lordosis brace | |
| JP4511326B2 (ja) | 椅子の背もたれ構造 | |
| KR101647439B1 (ko) | 경추와 흉추의 만곡을 유지하는 쿠션 | |
| JP5584746B2 (ja) | 骨盤回動に着目した椅子 | |
| CN113350002B (zh) | 一种脊柱医疗装置 | |
| US11484461B2 (en) | Chair-type massager | |
| KR102253084B1 (ko) | 등받이 장착형 거북목 교정기 | |
| CN113230081A (zh) | 聚拢调节式高强度临床骨科用骨骼保持器 | |
| KR100846733B1 (ko) | 의자 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20070906 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20070910 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100916 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110301 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110331 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140415 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4721254 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |