JP2006010568A - 位置検出装置 - Google Patents
位置検出装置 Download PDFInfo
- Publication number
- JP2006010568A JP2006010568A JP2004189814A JP2004189814A JP2006010568A JP 2006010568 A JP2006010568 A JP 2006010568A JP 2004189814 A JP2004189814 A JP 2004189814A JP 2004189814 A JP2004189814 A JP 2004189814A JP 2006010568 A JP2006010568 A JP 2006010568A
- Authority
- JP
- Japan
- Prior art keywords
- detection
- lens
- sensor
- data
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/10—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens
- G02B7/102—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens controlled by a microcomputer
Abstract
【解決手段】 対象物(102、103)の移動に応じて周期的に変化する検出信号を出力する第1の検出手段(105)と、対象物の基準位置を検出する第2の検出手段(100)と、検出信号に基づいて、対象物の位置に応じた位置データを求める演算手段と、第2の検出手段の検出時における位置データが基準位置を示すデータと略一致するように、第1および第2の検出手段のうち少なくとも一方の位置を調節する調節手段(110)とを有する。
【選択図】 図1
Description
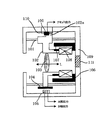
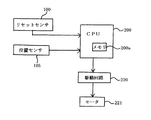
リセットセンサ100の出力が変化する点(エッジ)を検出するために、図2のCPU200は、駆動回路220を介してボイスコイルモータ221のコイル108への通電を行うことによってレンズ103を光軸方向一方向に移動させる。例えば、レンズ103の移動領域のうち一方のメカ端に相当する位置の方向へレンズ103を移動させる。ここで、図2のCPU200は、レンズ装置における動作を制御する。
CPU200はレンズ103を駆動している間、リセットセンサ100の出力が変化したか否かの判別を行う。すなわち、レンズホルダ102に設けられた遮光部102aがリセットセンサ(フォトインタラプタ)100を遮光する位置を基準位置とするため、リセットセンサ100の出力の立ち上がりエッジあるいは立ち下りエッジの検出を行う。ここで、リセットセンサ100の出力エッジを検出するまで、本ステップの検出動作を繰り返し行い、出力エッジを検出したときにはステップS103に進む。
レンズ103を低速で反転駆動させる。すなわち、ステップS102でリセットセンサ100の出力エッジが検出されるまでのレンズ103の移動方向とは反対方向であって、該移動速度よりも遅い速度でレンズ103を移動させる。
ステップS102と同様に、リセットセンサ100の出力エッジの検出を行う。ここで、出力エッジが検出されるまでは、本ステップの検出動作を繰り返し行い、出力エッジが検出されたときにはステップS105に進む。
CPU200は、駆動回路220を介してモータ108への通電を遮断することにより、レンズ103の駆動を停止させる。
CPU200は、レンズ103が停止した時点での位置センサ105の出力結果に基づいて、レンズ103の位置データを生成する。ここで得られた位置データは、絶対位置を求めるために用いられる基準位置を示すデータとなる。
ステップS106で生成された位置データを、CPU200内に設けられたRAMやEEPROMなどのメモリ200aに記憶する。なお、このメモリは、CPU200外に設けてもよい。

なお、Eは基準位置の補正量、Aは正弦波の振幅、θは位相、λは正弦波の波長とする。また、図7の点線よりも右側はCPU内部で処理できる部分である。
CPU200は駆動回路220を介してモータ221を駆動させることによって、レンズ103を光軸L方向における一方向に移動させる。これにより、基準位置のサーチ、すなわち、リセットセンサ100の出力エッジを検出する動作を行う。例えば、ボイスコイルモータのコイル108(図1参照)への通電を行うことで、レンズ103を、この移動領域のうち一方のメカ端に相当する位置の方向へ移動させる。
実施例1と同様に、リセットセンサ100の出力が変化したか否かを判別する、すなわわち、基準位置を検出するトリガとしてのリセットセンサ100の出力エッジの検出動作を行う。ここで、リセットセンサ100の出力エッジを検出しない場合には、エッジ検出動作を繰り返し行い、検出された場合にはステップS203に進む。
基準位置の検出精度を向上させるために、レンズ103を低速で反転駆動させる。すなわち、ステップS202でリセットセンサ100の出力エッジを検出するまでのレンズ103の移動方向とは反対方向であって、該移動速度よりも小さい移動速度でレンズ103を移動させる。
ステップS202と同様にリセットセンサ100の出力が変化したか否かの判別を行う。ここで、リセットセンサ100の出力エッジが検出されるまでは、エッジ検出動作を繰り返し行い、出力エッジを検出した場合にはステップS205に進む。
CPU200は駆動回路220を介してモータ221の駆動を停止させることにより、レンズ103の駆動を停止させる。
上述した基準位置の補正量を演算するために必要なA相またはB相の位相検出を行う。位相検出方法としては、例えば、波形振幅のピーク(極大、極小値)の位相を原点として、波長λの逓倍でサンプリングすることで、どの位相であるかを検出する方法がある。
基準位置を示す位置データを内挿演算結果から求める。ここで得られた基準位置を示す位置データは、誤差を含んだ(理想データに対するずれを持つ)位置データとなっている。
上述した式(1)を用いて基準位置の補正量を演算によって求める。
ステップS208で得られた基準位置の補正量を用いて、ステップS207で得られた位置データの補正を行う。
補正後の基準位置に関する位置データを、RAMやEEPRPOM等の基準位置記憶部211に記憶する。そして、絶対位置の検出を行う場合には、基準位置記憶部211で記憶した補正後の基準位置に関する位置データを用いる。
CPU200は、増幅器201、202で増幅されたA相およびB相の波形を、AD変換器203、204を介して取り込む。
ゲイン・オフセット調整部205、206において、AD変換器203、204の出力信号(A相およびB相の波形)に対してゲイン及びオフセットを揃えるための調整を行う。但し、この調整処理は、AD変換器203、204で取り込む前のアナログ信号に対して行ってもよい。
位相検出部208により、ステップS302で調整されたA相およびB相の波形の位相を検出する。
内挿演算部209により、ステップS302で調整された波形のうち所定の部分、すなわち、λ/4の範囲内の成分を切り出し、切り出したA相およびB相の波形を繋ぎ合わせて位置データを生成する(内挿演算処理)。この位置データは、レンズ103の現在位置を示すデータであるが、理想データに対してずれている場合がある。
位置補正量演算部210により、ステップS303で検出した位相と、上記式(1)とを用いて、レンズ103の現在位置を示す位置データに対する補正量を算出する。ここで、内挿演算によって生成された位置データと理想データとが一致していれば補正量はゼロとなる。
位置検出部212により、ステップS305で算出した補正量を用いて、ステップS304で得られた位置データを補正する。これにより、補正された位置データと、理想データとが略一致するようになる。
ステップS306で得られた位置データ(補正された位置データ)と、基準位置記憶部211で記憶された基準位置を示す位置データ(理想データと略一致したデータ)とを用いて、レンズ103の絶対位置を算出する。この絶対位置は、レンズ103の現在位置を示す位置データと、基準位置を示す位置データとの差をとることによって求められる。
105:位置センサ
110:スライド機構
102:レンズホルダ
103:レンズ
200:CPU
Claims (6)
- 対象物の移動に応じて複数の周期的に変化する検出信号を出力する第1の検出手段と、
前記対象物の基準位置を検出する第2の検出手段と、
前記検出信号に基づいて、前記対象物の位置に応じた位置データを求める演算手段と、
前記第2の検出手段の検出時における前記位置データが前記基準位置を示すデータと略一致するように、前記第1および第2の検出手段のうち少なくとも一方の位置を調節する調節手段とを有することを特徴とする位置検出装置。 - 対象物の移動に応じて周期的に変化する検出信号を出力する第1の検出手段と、
前記対象物の基準位置を検出する第2の検出手段と、
前記検出信号に基づいて、前記対象物の位置に応じた位置データを求める第1の演算手段と、
前記第2の検出手段の検出時における前記位置データと前記基準位置を示すデータとの差を求める第2の演算手段と、
前記差に基づいて、前記第2の検出手段の検出時における前記位置データを補正する補正手段とを有することを特徴とする位置検出装置。 - 前記第2の演算手段は、前記対象物が所定の位置にあるときの前記位置データと前記所定の位置を示すデータとの差を求め、
前記補正手段は、前記差に基づいて、前記所定の位置での前記位置データを補正することを特徴とする請求項2に記載の位置検出装置。 - 移動可能な対象物と、
該対象物の位置を検出する、請求項1から3のいずれか1つに記載の位置検出装置とを有することを特徴とする機器。 - 移動可能な光学素子と、
該光学素子の位置を検出する、請求項1から3のいずれか1つに記載の位置検出装置とを有することを特徴とするレンズ装置。 - 請求項5に記載のレンズ装置を有することを特徴とする撮影装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004189814A JP2006010568A (ja) | 2004-06-28 | 2004-06-28 | 位置検出装置 |
| US11/155,869 US7856126B2 (en) | 2004-06-28 | 2005-06-16 | Position sensing device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004189814A JP2006010568A (ja) | 2004-06-28 | 2004-06-28 | 位置検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006010568A true JP2006010568A (ja) | 2006-01-12 |
| JP2006010568A5 JP2006010568A5 (ja) | 2007-08-02 |
Family
ID=35540908
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004189814A Pending JP2006010568A (ja) | 2004-06-28 | 2004-06-28 | 位置検出装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7856126B2 (ja) |
| JP (1) | JP2006010568A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007256144A (ja) * | 2006-03-24 | 2007-10-04 | Shicoh Eng Co Ltd | 位置検出装置及びレンズ駆動装置 |
| JP2009075292A (ja) * | 2007-09-20 | 2009-04-09 | Chinontec Kk | レンズ鏡筒、レンズ鏡筒の製造方法および光学機器 |
| JP2010071988A (ja) * | 2008-09-18 | 2010-04-02 | Sick Ag | 磁気又は誘電位置センサ |
| US7986468B2 (en) | 2008-01-18 | 2011-07-26 | Sony Corporation | Lens barrel and imaging device |
| US8319829B2 (en) | 2008-05-16 | 2012-11-27 | Ffei Limited | Method and system for controlling the position of a microscope lens |
| JP2019113757A (ja) * | 2017-12-25 | 2019-07-11 | キヤノン株式会社 | レンズ鏡筒及び光学機器 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4747523B2 (ja) * | 2004-07-02 | 2011-08-17 | ソニー株式会社 | 撮像装置及び撮像装置のズームレンズ制御方法 |
| JP5524509B2 (ja) * | 2009-05-11 | 2014-06-18 | パナソニック株式会社 | カメラ、携帯端末装置及びレンズの位置制御方法 |
| EP2671054A1 (de) | 2011-01-31 | 2013-12-11 | Witeg Labortechnik GmbH | Flaschendispenser mit digitaler volumenanzeige |
| US20140002642A1 (en) | 2012-06-15 | 2014-01-02 | Elmar SWIEGOT | Absolute position detection |
| US20140218807A1 (en) * | 2013-02-04 | 2014-08-07 | Production Resource Group L.L.C | Zoom Lens Assembly with End of Travel Sensors |
| US20160007854A1 (en) * | 2014-07-09 | 2016-01-14 | Physical Sciences, Inc. | Apparatus and Method for Assessment of Interstitial Tissue |
| US11649775B2 (en) * | 2020-09-24 | 2023-05-16 | Kohler Co. | Analog controller for electronic throttle body |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60145311U (ja) * | 1984-03-07 | 1985-09-26 | アルプス電気株式会社 | 光学式ロ−タリ−エンコ−ダ |
| JPH04254709A (ja) * | 1991-02-06 | 1992-09-10 | Fanuc Ltd | リファレンス位置出力付きロータリエンコーダ |
| JPH0743178A (ja) * | 1993-07-26 | 1995-02-10 | Matsushita Electric Ind Co Ltd | エンコーダ |
| JPH08136207A (ja) * | 1994-11-08 | 1996-05-31 | Canon Inc | 位置検出装置 |
| JPH1047999A (ja) * | 1996-07-31 | 1998-02-20 | Victor Co Of Japan Ltd | 光学式リニアエンコーダ及びその調整方法 |
| JPH10274548A (ja) * | 1997-03-31 | 1998-10-13 | Brother Ind Ltd | エンコーダの原点検出装置 |
| JPH116951A (ja) * | 1997-06-16 | 1999-01-12 | Canon Inc | レンズ装置または光学機器 |
| JP2004085684A (ja) * | 2002-08-23 | 2004-03-18 | Canon Inc | レンズ制御装置およびこれを備えたカメラ |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3772457A (en) * | 1971-03-29 | 1973-11-13 | American Express Invest | Sonic image transducer using a storage camera |
| DE2127751C3 (de) * | 1971-06-04 | 1974-08-01 | Exatest Messtechnik Gmbh, 5090 Leverkusen | Verfahren und Anordnung zur Ermittlung des Durchmessers eines Gegenstandes runder Querschnittsform mittels periodischer fotoelektrischer Abtastung |
| IT1216609B (it) * | 1988-04-21 | 1990-03-08 | Pirelli Cavi Spa | Sensore ottico di posizione. |
| US5327408A (en) * | 1990-09-07 | 1994-07-05 | International Business Machines Corporation | Optical disk with sector servo patterns compensating for variations in pattern size and/or radial velocity |
| JP3021156B2 (ja) * | 1991-12-25 | 2000-03-15 | オークマ株式会社 | 非真円形状加工装置における加工誤差補正方法 |
| JP3177931B2 (ja) | 1992-09-18 | 2001-06-18 | ソニー株式会社 | 原点検出方法およびカメラ |
| US5534692A (en) * | 1992-09-14 | 1996-07-09 | Sony Corporation | Method for detecting origin point of position sensor |
| JP3384133B2 (ja) * | 1994-08-10 | 2003-03-10 | ソニー株式会社 | レンズ駆動装置 |
| US5880880A (en) * | 1995-01-13 | 1999-03-09 | The General Hospital Corp. | Three-dimensional scanning confocal laser microscope |
| JP4403323B2 (ja) | 1999-06-15 | 2010-01-27 | ソニー株式会社 | 位置検出装置、カメラ装置及びレンズ位置検出方法 |
| JP2001194574A (ja) * | 2000-01-11 | 2001-07-19 | Fuji Photo Film Co Ltd | 移動機構、レンズ鏡胴、及び撮像装置 |
| JP2002319028A (ja) * | 2001-04-20 | 2002-10-31 | Shinkawa Ltd | 画像処理方法、同装置、およびボンディング装置 |
| FR2826899B1 (fr) * | 2001-07-04 | 2003-09-19 | Eastman Kodak Co | Dispositif de controle pour la mise en oeuvre d'un procede de rectification d'un arbre de coupe |
| JP2004062918A (ja) * | 2002-07-24 | 2004-02-26 | Pioneer Electronic Corp | チルトサーボ装置 |
| JP3785141B2 (ja) * | 2002-12-27 | 2006-06-14 | 株式会社東芝 | 荷電粒子ビーム描画装置の縮小率測定方法、荷電粒子ビーム描画装置のステージ位相測定方法、荷電粒子ビーム描画装置の制御方法、及び荷電粒子ビーム描画装置 |
-
2004
- 2004-06-28 JP JP2004189814A patent/JP2006010568A/ja active Pending
-
2005
- 2005-06-16 US US11/155,869 patent/US7856126B2/en not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60145311U (ja) * | 1984-03-07 | 1985-09-26 | アルプス電気株式会社 | 光学式ロ−タリ−エンコ−ダ |
| JPH04254709A (ja) * | 1991-02-06 | 1992-09-10 | Fanuc Ltd | リファレンス位置出力付きロータリエンコーダ |
| JPH0743178A (ja) * | 1993-07-26 | 1995-02-10 | Matsushita Electric Ind Co Ltd | エンコーダ |
| JPH08136207A (ja) * | 1994-11-08 | 1996-05-31 | Canon Inc | 位置検出装置 |
| JPH1047999A (ja) * | 1996-07-31 | 1998-02-20 | Victor Co Of Japan Ltd | 光学式リニアエンコーダ及びその調整方法 |
| JPH10274548A (ja) * | 1997-03-31 | 1998-10-13 | Brother Ind Ltd | エンコーダの原点検出装置 |
| JPH116951A (ja) * | 1997-06-16 | 1999-01-12 | Canon Inc | レンズ装置または光学機器 |
| JP2004085684A (ja) * | 2002-08-23 | 2004-03-18 | Canon Inc | レンズ制御装置およびこれを備えたカメラ |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007256144A (ja) * | 2006-03-24 | 2007-10-04 | Shicoh Eng Co Ltd | 位置検出装置及びレンズ駆動装置 |
| JP2009075292A (ja) * | 2007-09-20 | 2009-04-09 | Chinontec Kk | レンズ鏡筒、レンズ鏡筒の製造方法および光学機器 |
| US7986468B2 (en) | 2008-01-18 | 2011-07-26 | Sony Corporation | Lens barrel and imaging device |
| US8319829B2 (en) | 2008-05-16 | 2012-11-27 | Ffei Limited | Method and system for controlling the position of a microscope lens |
| JP2010071988A (ja) * | 2008-09-18 | 2010-04-02 | Sick Ag | 磁気又は誘電位置センサ |
| JP2019113757A (ja) * | 2017-12-25 | 2019-07-11 | キヤノン株式会社 | レンズ鏡筒及び光学機器 |
| JP7046596B2 (ja) | 2017-12-25 | 2022-04-04 | キヤノン株式会社 | レンズ鏡筒及び光学機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20060007316A1 (en) | 2006-01-12 |
| US7856126B2 (en) | 2010-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7856126B2 (en) | Position sensing device | |
| KR20090023874A (ko) | 카메라의 자동 초점 조절 장치 및 방법 | |
| JP5839786B2 (ja) | 撮像装置およびトラッキングデータの調整方法 | |
| US9307164B2 (en) | Imaging lens barrel and method for controlling operation of the same | |
| JP6374645B2 (ja) | 光学機器および光学機器の制御方法 | |
| JP2005062372A (ja) | 位置検出装置、光学装置、撮像システム、位置検出方法およびプログラム | |
| JP2008180773A (ja) | デジタルカメラおよび光学機器 | |
| KR20170091648A (ko) | 진폭 모니터링 시스템, 포커싱 및 레벨링 디바이스, 및 디포커싱 양 검출 방법 | |
| US9103699B2 (en) | Encoder and apparatus using the same | |
| JP5366454B2 (ja) | 光学機器 | |
| JP3673636B2 (ja) | レンズ制御装置、レンズ制御方法、記憶媒体 | |
| JP6289192B2 (ja) | 位置検出装置及びそれを有するレンズ装置及び光学操作装置 | |
| US10113888B2 (en) | Position detection apparatus, apparatus including the same and position detection method | |
| JP2019184711A5 (ja) | 制御装置、光学機器、撮像装置および制御方法 | |
| JP2001066655A (ja) | 防振機能付き撮影装置 | |
| JP4632423B2 (ja) | 位置制御装置、位置制御方法及び光学装置 | |
| JP6368605B2 (ja) | 位置検出装置及びそれを備えた駆動装置 | |
| JP2009015023A (ja) | 駆動装置及びこれを備えた撮像装置 | |
| JP2006243668A (ja) | ズームレンズ装置 | |
| JP2008191078A (ja) | Psd素子の検出値の補正方法およびこれを用いるレール変位量測定装置 | |
| JP6130628B2 (ja) | 反射型フォトセンサを用いたカメラのレンズ位置検出装置 | |
| JP4611174B2 (ja) | 撮像素子位置測定装置及び撮像素子位置測定方法 | |
| WO2005098499A1 (ja) | 撮像装置 | |
| US9874861B2 (en) | Position control apparatus and method for reducing calculation time and detecting an encode error of an incremental signal | |
| TW426829B (en) | The positioning method and device for the driving mechanism of scanner |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070620 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070620 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20081023 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20081201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091222 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20101207 |