JP2005299927A - 自動化された伝動装置のクラッチのクラッチトルクを制御する方法および装置 - Google Patents
自動化された伝動装置のクラッチのクラッチトルクを制御する方法および装置 Download PDFInfo
- Publication number
- JP2005299927A JP2005299927A JP2005110220A JP2005110220A JP2005299927A JP 2005299927 A JP2005299927 A JP 2005299927A JP 2005110220 A JP2005110220 A JP 2005110220A JP 2005110220 A JP2005110220 A JP 2005110220A JP 2005299927 A JP2005299927 A JP 2005299927A
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- speed
- torque
- function
- target torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 36
- 230000005540 biological transmission Effects 0.000 title claims abstract description 16
- 238000007689 inspection Methods 0.000 claims description 5
- 230000007704 transition Effects 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000009347 mechanical transmission Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D48/00—External control of clutches
- F16D48/06—Control by electric or electronic means, e.g. of fluid pressure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18063—Creeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/02—Clutches
- B60W2510/0241—Clutch slip, i.e. difference between input and output speeds
- B60W2510/025—Slip change rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/02—Clutches
- B60W2710/027—Clutch torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/30—Signal inputs
- F16D2500/31—Signal inputs from the vehicle
- F16D2500/3108—Vehicle speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/50—Problem to be solved by the control system
- F16D2500/502—Relating the clutch
- F16D2500/50206—Creep control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/50—Problem to be solved by the control system
- F16D2500/506—Relating the transmission
- F16D2500/50692—Simulate the characteristics of a torque converter
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/70—Details about the implementation of the control system
- F16D2500/704—Output parameters from the control unit; Target parameters to be controlled
- F16D2500/70402—Actuator parameters
- F16D2500/7041—Position
- F16D2500/70412—Clutch position change rate
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2500/00—External control of clutches by electric or electronic means
- F16D2500/70—Details about the implementation of the control system
- F16D2500/704—Output parameters from the control unit; Target parameters to be controlled
- F16D2500/70422—Clutch parameters
- F16D2500/70438—From the output shaft
- F16D2500/7044—Output shaft torque
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
Abstract
【解決手段】方法に関しては、クラッチトルクをスリップに依存して、および/または、車両の速度に依存して制御することによる。装置に関しては少なくとも1つの制御装置が設けられており、制御装置はクラッチトルクをクラッチにおけるスリップに依存して、および/または、車両の速度に依存して制御する。
【選択図】図3
Description
Claims (17)
- クリープ機能が起動される際の車両のパワートレーンにおける自動化された伝動装置のクラッチのクラッチトルクを制御する方法において、
前記クラッチトルクを前記スリップに依存して、および/または、前記車両の速度に依存して制御することを特徴とする方法。 - クラッチ目標トルクを少なくとも、前記クラッチの所定のスリップ回転数に依存して求める、請求項1記載の方法。
- スリップ回転数として基準スリップ回転数を使用し、該基準スリップ回転数を機関アイドリング回転数と被動側の回転数との差から求める、請求項2記載の方法。
- 前記クラッチトルクを前記基準スリップ回転数に比例する関数に基づき決定し、前記クラッチ目標トルクを較正可能な量により制限する、請求項3記載の方法。
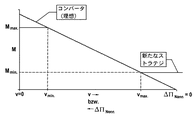
- 最大クラッチ目標トルク(Mmax)を最小速度(Vmin)に調整し、最小クラッチ目標トルク(Mmin)を最大速度(Vmax)に調整する、請求項4記載の方法。
- 機関アイドリング回転数として機関基準アイドリング回転数または機関目標アイドリング回転数を使用する、請求項3から5までのいずれか1項記載の方法。
- 被動側の回転数として、目下の伝動装置入力軸回転数または計算された伝動装置入力軸回転数を使用する、請求項3から6までのいずれか1項記載の方法。
- 被動側の回転数として、測定された少なくとも1つの車輪回転数を使用する、請求項3から7までのいずれか1項記載の方法。
- 車両のクリープ段階において、最大クラッチトルク(Mmax)の計算後に、前記基準スリップ回転数または前記車両の速度に依存して、適用可能な開始傾斜関数がもはや使用されないか否かを検査し、該検査は前記クリープ段階の開始時のクラッチトルクの値および時間間隔に依存する、請求項3から8までのいずれか1項記載の方法。
- 前記適用可能な開始傾斜関数を使用する場合には、前記クラッチ目標トルクを第1の傾斜関数を適用して計算する、請求項9記載の方法。
- 前記適用可能な開始傾斜関数を使用しない場合には、第2の傾斜関数が終了しているか否かを検査し、終了していない場合には前記クラッチ目標トルクを該第2の傾斜関数に応じて計算する、請求項9または10記載の方法。
- 前記クラッチ目標トルクを限界として前記傾斜関数の終了後に、前記クリープ段階の間前記クラッチ目標トルク(Mmax)の最大値にセットする、請求項9から11までのいずれか1項記載の方法。
- 機関停止保護を使用する、請求項1から12までのいずれか1項記載の方法。
- 前記機関停止保護において、それぞれ目下の機関回転数が該機関停止保護に関して適用可能な限界回転数を上回っているか否かを検査する請求項13記載の方法。
- 前記目下の機関回転数が適用可能な限界回転数を上回る場合いには、前記計算されたクラッチ目標トルクを維持する、請求項14記載の方法。
- 前記限界回転数を下回る場合には前記クラッチを即座に開く、請求項14または15記載の方法。
- 例えば請求項1から16までのいずれか1項記載の方法を実施する、クリープ機能が起動される際の車両のパワートレーンにおける自動化された伝動装置のクラッチのクラッチトルクを制御する装置において、
少なくとも1つの制御装置が設けられており、該制御装置はクラッチトルクをクラッチにおけるスリップに依存して、および/または、車両の速度に依存して制御することを特徴とする、装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102004016899 | 2004-04-06 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005299927A true JP2005299927A (ja) | 2005-10-27 |
| JP4660656B2 JP4660656B2 (ja) | 2011-03-30 |
Family
ID=34895492
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005110220A Expired - Fee Related JP4660656B2 (ja) | 2004-04-06 | 2005-04-06 | 自動化された伝動装置のクラッチのクラッチトルクを制御する方法および装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7933707B2 (ja) |
| EP (1) | EP1584832B1 (ja) |
| JP (1) | JP4660656B2 (ja) |
| KR (1) | KR101184250B1 (ja) |
| AT (1) | ATE423921T1 (ja) |
| DE (1) | DE502005006677D1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2980388A4 (en) * | 2014-02-04 | 2016-05-11 | Suzuki Motor Corp | DRIVE CONTROL DEVICE |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE502005006677D1 (de) * | 2004-04-06 | 2009-04-09 | Luk Lamellen & Kupplungsbau | Verfahren zum Ansteuern des Kupplungsmomentes einer Kupplung eines automatisierten Getriebes und eine Vorrichtung zum Durchführen des Verfahrens |
| WO2008069706A1 (en) * | 2006-12-06 | 2008-06-12 | Volvo Construction Equipment Ab | A method and a system for controlling a vehicle |
| DE102007030490A1 (de) | 2007-06-30 | 2009-01-02 | Zf Friedrichshafen Ag | Verfahren zur Betätigung einer Kupplung eines Antriebsstrangs |
| DE102012211111A1 (de) * | 2012-06-28 | 2014-01-02 | Robert Bosch Gmbh | Verfahren zum Erkennen eines Sprungs in einem von einem Motor eines Fahrzeuges abgegebenen Drehmoment |
| JP5483770B2 (ja) * | 2012-09-21 | 2014-05-07 | 富士重工業株式会社 | 4輪駆動車の制御装置 |
| US9423026B2 (en) * | 2013-12-20 | 2016-08-23 | Cnh Industrial America Llc | System and method for controlling a continuously variable transmission when transitioning operation from a hydrostatic mode to a hydro-mechanical mode |
| KR20160148823A (ko) | 2015-06-16 | 2016-12-27 | 현대자동차주식회사 | 자동화 수동변속기 제어방법 |
| CN105736601B (zh) * | 2016-03-02 | 2017-12-01 | 安徽江淮汽车集团股份有限公司 | 一种汽车蠕动初期离合器扭矩控制方法及系统 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002096658A (ja) * | 2000-07-17 | 2002-04-02 | Hitachi Ltd | 自動車の制御方法、および制御装置 |
| WO2003002369A2 (de) * | 2001-06-27 | 2003-01-09 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Verfahren zur veränderung des kupplungsmoments einer kupplung im antriebsstrang eines fahrzeugs mit automatisiertem schaltgetriebe |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2488760A (en) * | 1945-01-15 | 1949-11-22 | Brown Sidney Charles | Weight integrator |
| US2672503A (en) * | 1948-02-07 | 1954-03-16 | Western Union Telegraph Co | System and apparatus for facsimile telegraph transmission and recording |
| US2817840A (en) * | 1955-07-05 | 1957-12-31 | Dennisson | Container closing devices |
| US4590455A (en) * | 1979-10-22 | 1986-05-20 | Fritzinger George H | Traffic control system using timed blink signal and road marker |
| US4790418A (en) * | 1987-04-30 | 1988-12-13 | Ford Motor Company | Transmission clutch loop transfer control |
| JP2693963B2 (ja) * | 1988-03-23 | 1997-12-24 | アイシン・エィ・ダブリュ株式会社 | 車輌用自動変速機における発進装置 |
| FR2645805B1 (fr) * | 1989-04-17 | 1995-07-13 | Luk Lamellen & Kupplungsbau | Procede de commande d'un embrayage a friction automatise agissant entre un moteur d'entrainement et une transmission, appareillage pour la mise en oeuvre du procede, et regulation associee d'un embrayage a friction |
| JPH0415128A (ja) * | 1990-05-07 | 1992-01-20 | Hino Motors Ltd | 差動制限装置および動力装置 |
| AU4942193A (en) * | 1992-08-21 | 1994-03-15 | Luk Getriebe-Systeme Gmbh | Process for controlling a torque transmission system |
| CN1062814C (zh) * | 1993-09-17 | 2001-03-07 | 卢克驱动系统有限公司 | 用于带变扭器的机动车的转矩传递系统 |
| JP3033416B2 (ja) * | 1993-12-28 | 2000-04-17 | 日産自動車株式会社 | 車両の前後輪間駆動力配分制御装置 |
| JP3430272B2 (ja) * | 1994-07-08 | 2003-07-28 | 日産自動車株式会社 | 自動変速機のロックアップ制御装置 |
| KR100342032B1 (ko) * | 1994-09-19 | 2002-11-30 | 마츠다 가부시키가이샤 | 유체커플링의록크업제어장치 |
| JP3191632B2 (ja) * | 1995-08-09 | 2001-07-23 | トヨタ自動車株式会社 | 車両用直結クラッチのスリップ制御装置 |
| JP3584106B2 (ja) * | 1996-01-26 | 2004-11-04 | セイコーエプソン株式会社 | 電気自動車の駆動装置及びその制御方法 |
| DE19733465B4 (de) | 1996-08-20 | 2012-08-30 | Volkswagen Ag | Verfahren bzw. Anordnung zur Steuerung einer automatisierten Kupplung |
| JP3503411B2 (ja) * | 1997-04-16 | 2004-03-08 | 日産自動車株式会社 | 締結要素の制御装置 |
| JP3991528B2 (ja) * | 1999-10-12 | 2007-10-17 | 日本精工株式会社 | 無段変速機のための発進クラッチ制御装置 |
| DE19952351A1 (de) * | 1999-10-30 | 2001-05-23 | Zahnradfabrik Friedrichshafen | Verfahren und Vorrichtung zum Steuern und Regeln einer Kupplung in einem stufenlosen Automatikgetriebe für ein Kraftfahrzeug |
| US6633806B2 (en) * | 2001-08-30 | 2003-10-14 | Eaton Corporation | Control for transmission system utilizing a centrifugal clutch |
| JP3536838B2 (ja) * | 2002-01-11 | 2004-06-14 | 日産自動車株式会社 | 車両の駆動力制御装置 |
| DE10316458B4 (de) * | 2002-04-10 | 2013-10-31 | Schaeffler Technologies AG & Co. KG | Getriebesteuerung und Verfahren zum Durchführen einer Reibwertadaption |
| JP2004116748A (ja) * | 2002-09-30 | 2004-04-15 | Aisin Seiki Co Ltd | クリープトルク制御装置 |
| CN1688460B (zh) * | 2002-10-04 | 2010-04-28 | 卢克摩擦片和离合器两合公司 | 动力换档变速器换档过程的控制方法及动力换档变速器 |
| JP2005066110A (ja) * | 2003-08-26 | 2005-03-17 | Olympia:Kk | 遊技機 |
| KR200342386Y1 (ko) * | 2003-11-28 | 2004-02-18 | 한국수력원자력 주식회사 | 오염된 핫셀바닥 제염용 원격걸레로봇 |
| DE502005006677D1 (de) * | 2004-04-06 | 2009-04-09 | Luk Lamellen & Kupplungsbau | Verfahren zum Ansteuern des Kupplungsmomentes einer Kupplung eines automatisierten Getriebes und eine Vorrichtung zum Durchführen des Verfahrens |
| JP4418404B2 (ja) * | 2005-03-09 | 2010-02-17 | ジヤトコ株式会社 | クラッチ制御装置及びクラッチ制御方法 |
| DE102006041155B4 (de) * | 2006-09-01 | 2021-09-02 | Volkswagen Ag | Verfahren zur Schaltsteuerung eines Antriebsstrangs eines Kraftfahrzeugs |
-
2005
- 2005-03-03 DE DE502005006677T patent/DE502005006677D1/de not_active Expired - Lifetime
- 2005-03-03 AT AT05004604T patent/ATE423921T1/de not_active IP Right Cessation
- 2005-03-03 EP EP05004604A patent/EP1584832B1/de not_active Expired - Lifetime
- 2005-04-04 KR KR1020050027909A patent/KR101184250B1/ko not_active Expired - Lifetime
- 2005-04-05 US US10/907,535 patent/US7933707B2/en not_active Expired - Fee Related
- 2005-04-06 JP JP2005110220A patent/JP4660656B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002096658A (ja) * | 2000-07-17 | 2002-04-02 | Hitachi Ltd | 自動車の制御方法、および制御装置 |
| WO2003002369A2 (de) * | 2001-06-27 | 2003-01-09 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Verfahren zur veränderung des kupplungsmoments einer kupplung im antriebsstrang eines fahrzeugs mit automatisiertem schaltgetriebe |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2980388A4 (en) * | 2014-02-04 | 2016-05-11 | Suzuki Motor Corp | DRIVE CONTROL DEVICE |
Also Published As
| Publication number | Publication date |
|---|---|
| ATE423921T1 (de) | 2009-03-15 |
| KR20060045461A (ko) | 2006-05-17 |
| DE502005006677D1 (de) | 2009-04-09 |
| EP1584832A1 (de) | 2005-10-12 |
| US20050221951A1 (en) | 2005-10-06 |
| US7933707B2 (en) | 2011-04-26 |
| JP4660656B2 (ja) | 2011-03-30 |
| EP1584832B1 (de) | 2009-02-25 |
| KR101184250B1 (ko) | 2012-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4306713B2 (ja) | 車両の制御装置、制御方法、その制御方法をコンピュータで実現するプログラムおよびそのプログラムを記録した記録媒体 | |
| KR101362105B1 (ko) | 무단 변속기의 제어 장치 | |
| US20060089232A1 (en) | Drive apparatus for hybrid vehicle and control method and control device therefor | |
| JP6208358B2 (ja) | ロックアップクラッチの制御装置 | |
| US7149616B2 (en) | Control apparatus and method for vehicle | |
| JP2006520441A (ja) | 自動車のドライブトレインの動作方法 | |
| JP4660656B2 (ja) | 自動化された伝動装置のクラッチのクラッチトルクを制御する方法および装置 | |
| CN100381313C (zh) | 车辆用控制装置 | |
| JP2004528519A (ja) | 自動変速装置のアップシフトブレーキ制御 | |
| KR101714239B1 (ko) | 차량용 클러치 제어방법 | |
| JP6307486B2 (ja) | 車両の制御装置 | |
| JP2010071297A (ja) | 車両制御装置 | |
| JP2006528324A (ja) | 自動車用駆動伝達系の制御方法 | |
| KR100384007B1 (ko) | 차량용 자동 변속기의 변속 제어 장치 및 그 방법 | |
| CN112752688A (zh) | 车辆控制装置 | |
| JP2001208183A (ja) | 無段変速機のライン圧制御装置 | |
| JP4687352B2 (ja) | 車両の制御装置 | |
| EP2003373A1 (en) | Control device and method for automatic transmission | |
| JP2723146B2 (ja) | 車両用無段変速機の変速比制御装置 | |
| JP4106561B2 (ja) | 電気自動車の駆動制御装置 | |
| WO2020026717A1 (ja) | トルクコンバータのスリップ制御装置 | |
| JP3719104B2 (ja) | 車両の駆動力制御装置 | |
| JP4432436B2 (ja) | 無段変速機の変速制御装置 | |
| JP2005344933A (ja) | 自動クラッチを制御する方法 | |
| CN111629946A (zh) | 用于校准作业机械的特性曲线族的方法以及作业机械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080312 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091225 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100324 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100329 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100422 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101008 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20101108 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20101111 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20101112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20101112 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4660656 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140114 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |