JP2005297906A - 電気式動力舵取装置 - Google Patents
電気式動力舵取装置 Download PDFInfo
- Publication number
- JP2005297906A JP2005297906A JP2004120407A JP2004120407A JP2005297906A JP 2005297906 A JP2005297906 A JP 2005297906A JP 2004120407 A JP2004120407 A JP 2004120407A JP 2004120407 A JP2004120407 A JP 2004120407A JP 2005297906 A JP2005297906 A JP 2005297906A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- duty ratio
- switching
- motor
- electric power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Steering Controls (AREA)
Abstract
【解決手段】 PWM制御のデューティ比が予め設定された値を越える際に(S14:No)、スイッチング周期を所定値(一定値)にする(S20)。デューティ比が予め設定された値以下になった時に(S14:Yes)、スイッチング周期を所定値より長くする(S16)。FETをスロースタートさせてノイズの発生を防ぎながら、低デューティ比でもスイッチング周期を長くすることで、確実にモータへ通電し、不感帯の発生を防げる。
【選択図】 図7
Description
ここで、特許文献1には、低デューティ比での不感帯を無くすため、低デューティ比時に電圧ディザ信号をモータへ印加する技術が開示されている。
前記PWM制御のデューティ比が予め設定された値を越える際に、スイッチング周期を所定値(一定値)にし、デューティ比が前記予め設定された値以下になった時に、前記スイッチング周期を前記所定値より長くするスイッチング周期調整手段を備えることを技術的特徴とする。
[第1実施形態]
図1は第1実施態様の電気式動力舵取装置10の構成を示すブロック図である。電気式動力舵取装置10は、操舵トルクを検出するためのトルクセンサ22と、トルクセンサ22からの操舵トルク及び車速センサ24からの車速に基づきモータ指令トルク(操舵アシスト量)を演算する制御装置30と、モータ指令トルクに応じた電流指令値を求めてモータMへの通電を制御するモータ駆動回路26とを備える。
なお、ハンドル戻し補償制御80は、ハンドルの角速度に代えて、モータMの角速度に応じてハンドル戻し量を決定するようにしてもよい。
なお、ダンパ補償制御90はハンドルの角速度に代えて、モータMの角速度に応じてダンパ量を決定するようにしてもよい。
図8(A)、図8(B)は、高デューティ比時の一定周期でのスイッチングを示すタイミングチャートであり、図8(C)、図8(D)は、低デューティ比時の周期を長くした際のスイッチングを示すタイミングチャートである。
まず、出力デューティ比(Dn)を計算する(S12)。ここで、小数点以下は四捨五入して%単位で計算し、0.4%は、0%に、0.5%は1%とする。次に、デューティ比が所定値(例えば16%)以下かを判断する(S14)。ここで、デューティ比が所定値を越える場合には(S14:No)、PWM周期を0.5ms、即ち、PWM周波数を20KHzに一定とし、デューティ比に応じたオン時間、例えば、図8(A)を参照して上述したようにデューティ比20%の際にはオン時間0.1msを、図8(B)を参照して上述したようにデューティ比40%の際にはオン時間0.2msを設定する。
上述した第1実施形態では、本発明の構成を電気式動力舵取装置のアシストトルク調整に用いた。これに対して、第2実施形態では、ステアリングホイールと操舵輪とを連結する操舵伝達系の途中に電動モータの駆動により伝達比を可変する伝達比可変手段を備えた電気式動力舵取装置に関するものである。
上述した第1実施形態では、本発明の構成を電気式動力舵取装置のアシストトルク調整に用いた。これに対して、第3実施形態では、ステアリングホイールの操作を検出し、制御装置によってアクチュエータを駆動して操舵を行うSBW(ステアバイワイヤ)式の電気式動力舵取装置に関するものである。
22 トルクセンサ
24 車速センサ
26 モータ駆動回路
30 ECU
48 加算ノード
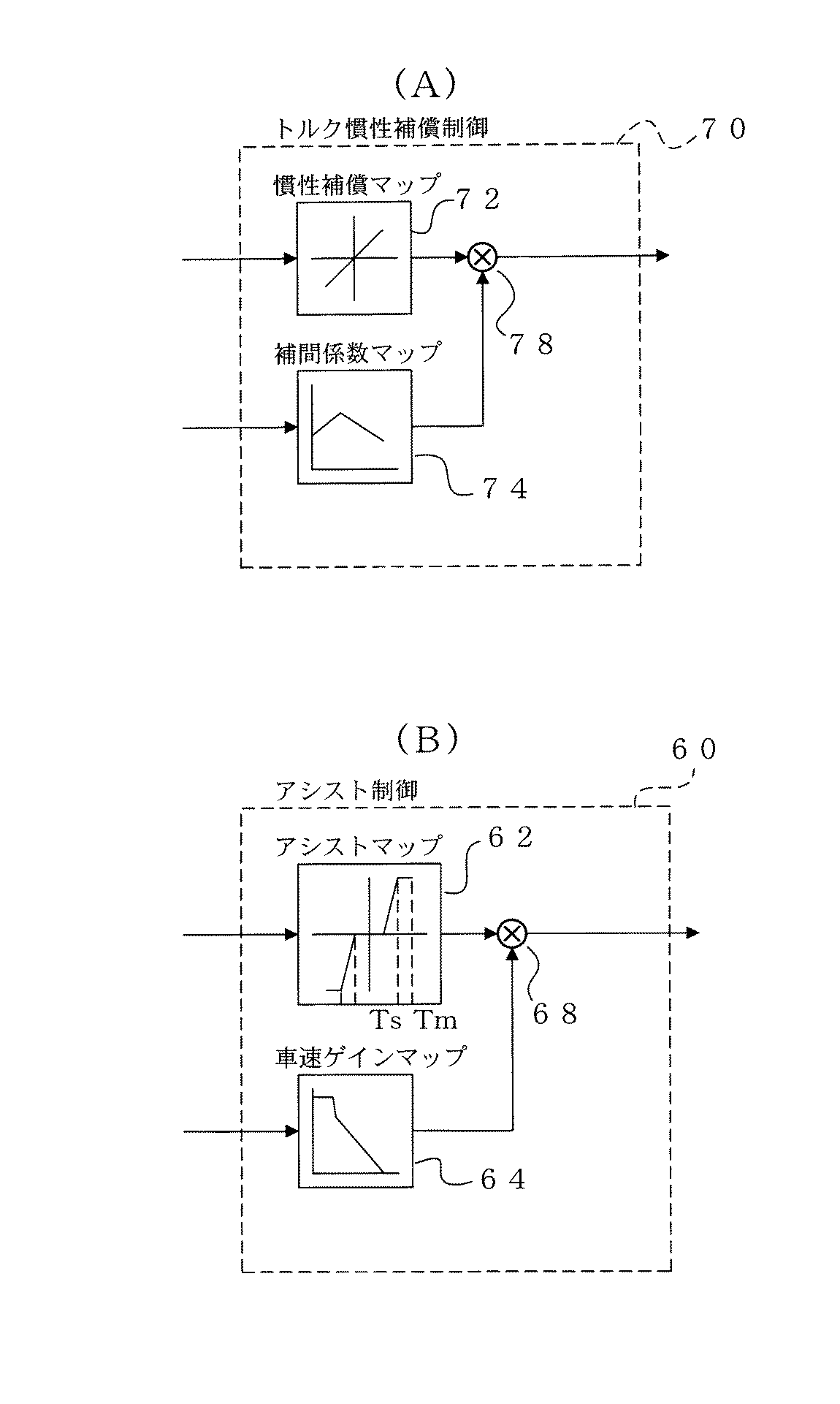
60 アシスト制御
70 トルク慣性補償制御
80 ハンドル戻し補償制御
90 ダンパ補償制御
110 周期制御
214 ステアリングホイール
215 ロッド
216 操舵角センサ
222 ギヤ比可変ユニット
224 車速センサ
230 ECU
Claims (4)
- 操舵状態を検出して操舵状態に応じた操舵補助指令値を演算する演算部と、操舵補助力を発生するモータと、スイッチング素子をスロースタートさせて前記モータへの通電を制御する通電制御回路と、演算された操舵補助指令値に基づき前記通電制御回路を介して前記モータをPWM制御するモータ制御部とを備える電気式動力舵取装置において、
前記PWM制御のデューティ比が予め設定された値を越える際に、スイッチング周期を所定値にし、デューティ比が前記予め設定された値以下になった時に、前記スイッチング周期を前記所定値より長くするスイッチング周期調整手段を備えることを特徴とする電気式動力舵取装置。 - 前記予め設定された値は、前記一定のスイッチング周期で、前記スイッチング素子をオンできなくなるデューティ比であることを特徴とする請求項1の電気式動力舵取装置。
- 前記長くするスイッチング周期(Tn)は、前記スイッチング素子のスロースタート時間をTd、当該スイッチングのバラツキを無くすための余裕時間をPm、デューティ比(%)をDnとした際に次式で表されることを特徴とする請求項1又は請求項2の電気式動力舵取装置。
Tn=(Td+Pm)×100/Dn
- 前記電気式動力舵取装置は、ステアリングホイールと操舵輪とを連結する操舵伝達系の途中に前記電動モータの駆動により伝達比を可変する伝達比可変手段を備えることを特徴とする請求項1〜請求項3のいずれか1の電気式動力舵取装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004120407A JP2005297906A (ja) | 2004-04-15 | 2004-04-15 | 電気式動力舵取装置 |
| US11/098,513 US7086496B2 (en) | 2004-04-15 | 2005-04-05 | Electric power steering apparatus |
| EP05007396A EP1586493A1 (en) | 2004-04-15 | 2005-04-05 | Electric power steering apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004120407A JP2005297906A (ja) | 2004-04-15 | 2004-04-15 | 電気式動力舵取装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005297906A true JP2005297906A (ja) | 2005-10-27 |
| JP2005297906A5 JP2005297906A5 (ja) | 2007-05-31 |
Family
ID=34934766
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004120407A Pending JP2005297906A (ja) | 2004-04-15 | 2004-04-15 | 電気式動力舵取装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7086496B2 (ja) |
| EP (1) | EP1586493A1 (ja) |
| JP (1) | JP2005297906A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008162471A (ja) * | 2006-12-28 | 2008-07-17 | Jtekt Corp | 車両用操舵装置 |
| JP2012001183A (ja) * | 2010-06-21 | 2012-01-05 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2012214093A (ja) * | 2011-03-31 | 2012-11-08 | Honda Motor Co Ltd | 電動パワーステアリング装置の制御方法 |
| JP2013052834A (ja) * | 2011-09-06 | 2013-03-21 | Nissan Motor Co Ltd | 規範応答演算装置およびそれを用いた車両用操舵装置 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1616774A3 (en) * | 2004-07-15 | 2007-08-08 | NSK Ltd., | Electric power steering apparatus |
| KR100675480B1 (ko) * | 2005-06-13 | 2007-01-29 | 주식회사 만도 | 전자제어 현가장치 |
| JP4861100B2 (ja) * | 2006-09-11 | 2012-01-25 | ローム株式会社 | モータ駆動回路、モータ駆動装置、負荷駆動装置、および電子機器、ならびにパルス変調方法 |
| US7624836B2 (en) * | 2006-10-30 | 2009-12-01 | Caterpillar Inc. | Steering system having multiple strategies and variable deadzone |
| JP2008185187A (ja) * | 2007-01-31 | 2008-08-14 | Yamaha Motor Co Ltd | 変速装置、それを備えた車両、並びに変速機構の制御装置およびその制御方法 |
| WO2012155089A2 (en) * | 2011-05-12 | 2012-11-15 | Saez Carlos A | Method and apparatus for variable reduced effort steering in electric steering systems |
| JP7259574B2 (ja) * | 2019-06-17 | 2023-04-18 | 株式会社ジェイテクト | 制御装置、および転舵装置 |
| CN114394151B (zh) * | 2021-12-15 | 2024-05-07 | 重庆大学 | 一种智能汽车的人机共驾转向控制方法及其转向系统 |
| DE102024124085A1 (de) * | 2023-08-23 | 2025-02-27 | Steering Solutions Ip Holding Corporation | Steer-by-wire-strassenradaktuator-dither zur verbesserung der schätzung der zahnstangenkraft |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58172984A (ja) * | 1982-04-02 | 1983-10-11 | Mitsubishi Heavy Ind Ltd | 直流モ−タ速度制御装置 |
| JPS61166772A (ja) * | 1985-01-21 | 1986-07-28 | Nissan Motor Co Ltd | 車両用操舵装置 |
| JPH0638301A (ja) * | 1992-07-20 | 1994-02-10 | Toyota Autom Loom Works Ltd | 電動車両の走行用電動機のpwm制御装置 |
| JPH06141587A (ja) * | 1992-10-23 | 1994-05-20 | Mitsubishi Heavy Ind Ltd | ブラシレスモータ駆動装置 |
| JP3478193B2 (ja) * | 1999-05-24 | 2003-12-15 | トヨタ自動車株式会社 | 電源監視装置 |
| FR2803958B1 (fr) * | 2000-01-18 | 2002-03-29 | Sagem | Moteur a commutation electronique |
| DE10161990A1 (de) | 2000-12-28 | 2002-07-04 | Papst Motoren Gmbh & Co Kg | Verfahren zur Strombegrenzung bei einem Elektromotor und Motor zur Durchführung eines solchen Verfahrens |
| JP4660988B2 (ja) * | 2001-07-03 | 2011-03-30 | 日本精工株式会社 | 電動パワーステアリング装置の制御装置 |
| JP2003153584A (ja) * | 2001-11-12 | 2003-05-23 | Koyo Seiko Co Ltd | 電動パワーステアリング装置 |
-
2004
- 2004-04-15 JP JP2004120407A patent/JP2005297906A/ja active Pending
-
2005
- 2005-04-05 EP EP05007396A patent/EP1586493A1/en not_active Withdrawn
- 2005-04-05 US US11/098,513 patent/US7086496B2/en not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008162471A (ja) * | 2006-12-28 | 2008-07-17 | Jtekt Corp | 車両用操舵装置 |
| JP2012001183A (ja) * | 2010-06-21 | 2012-01-05 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2012214093A (ja) * | 2011-03-31 | 2012-11-08 | Honda Motor Co Ltd | 電動パワーステアリング装置の制御方法 |
| JP2013052834A (ja) * | 2011-09-06 | 2013-03-21 | Nissan Motor Co Ltd | 規範応答演算装置およびそれを用いた車両用操舵装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7086496B2 (en) | 2006-08-08 |
| US20050230180A1 (en) | 2005-10-20 |
| EP1586493A1 (en) | 2005-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3459825B1 (en) | Electric power steering device | |
| JP3412579B2 (ja) | 車両の電動パワーステアリング装置 | |
| US6570352B2 (en) | Control unit for electric power steering apparatus | |
| JP4660883B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3231932B2 (ja) | 電動式パワーステアリング装置 | |
| JPH1159468A (ja) | 電動パワーステアリング装置 | |
| JP2000108916A (ja) | 電動パワーステアリング装置 | |
| JPWO2014162769A1 (ja) | 電動パワーステアリング装置 | |
| JP2005297906A (ja) | 電気式動力舵取装置 | |
| JP2002087293A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4356456B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| US20070162206A1 (en) | Electric power steering apparatus | |
| JP4088678B2 (ja) | 電気式動力舵取装置 | |
| JP3812229B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4300691B2 (ja) | 電気式動力舵取装置 | |
| JP4849065B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| CN110740922B (zh) | 转向控制装置、电动助力转向装置 | |
| JP4140321B2 (ja) | 電動パワーステアリング装置 | |
| CN100408405C (zh) | 电动动力转向系统 | |
| JP3666160B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3956737B2 (ja) | 電気式動力舵取装置 | |
| JP2008132918A (ja) | 車両用電動パワーステアリング装置の制御装置 | |
| JP3637764B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2003011834A (ja) | 電動パワーステアリング装置の制御装置 | |
| WO2022038808A1 (ja) | 操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20050908 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20050922 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20060228 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20060811 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070410 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090619 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090630 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091027 |