JP2005284867A - 駆動制御装置及び方法及び露光装置 - Google Patents
駆動制御装置及び方法及び露光装置 Download PDFInfo
- Publication number
- JP2005284867A JP2005284867A JP2004099730A JP2004099730A JP2005284867A JP 2005284867 A JP2005284867 A JP 2005284867A JP 2004099730 A JP2004099730 A JP 2004099730A JP 2004099730 A JP2004099730 A JP 2004099730A JP 2005284867 A JP2005284867 A JP 2005284867A
- Authority
- JP
- Japan
- Prior art keywords
- control
- value
- cycle
- stage
- drive control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B27/00—Photographic printing apparatus
- G03B27/32—Projection printing apparatus, e.g. enlarger, copying camera
- G03B27/52—Details
- G03B27/58—Baseboards, masking frames, or other holders for the sensitive material
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
- G03F7/70725—Stages control
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Control Of Position Or Direction (AREA)
Abstract
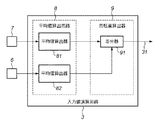
【解決手段】ステージ制御コントローラ10は制御対象23の状態値と制御目標値を入力し、該制御対象の制御量を出力する制御サイクルを繰り返す。レーザ干渉計6,7は制御対象23の位置を検出し、入力値演算回路3は、制御サイクルの1サイクル毎にレーザ干渉計6,7から複数の検出値を取得し、これら複数の検出値を用いてステージ制御コントローラ10へ入力する状態値を生成する。
【選択図】 図2
Description
制御対象の状態値と制御目標値を入力し、該制御対象の制御量を出力する制御サイクルを繰り返す制御手段と、
前記制御対象の位置、速度或いは加速度のいずれかを検出する検出器と、
前記制御サイクルの1サイクル毎に前記検出器から複数の検出値を取得し、該複数の検出値を用いて前記制御手段へ入力する状態値を生成する生成手段とを備える。
制御対象の状態値と制御目標値を入力し、該制御対象の制御量を出力する制御サイクルを繰り返す制御手段と、前記制御対象の位置、速度或いは加速度のいずれかを検出する検出器とを備えた駆動制御装置による駆動制御方法であって、
前記制御サイクルの1サイクル毎に前記検出器から複数の検出値を取得し、該複数の検出値を用いて状態値を生成する生成工程と、
前記生成工程で生成された状態値を前記制御手段へ入力する入力工程とを備える。
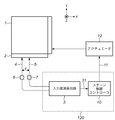
図11は本実施形態による露光装置の概略構成を示す模式図である。図11において、照明部101から出力された露光光によって、レチクルステージ102上に保持されたレチクル111が照射される。レチクル111を透過した露光光は投影光学系103に入射する。と上光学系103では、レチクル111を透過した露光光によって形成されるパターン像を所定倍率で縮小し、縮小されたパターン像はウエハステージ1に保持されたウエハ112上に投影される。ウエハステージ1は定盤104上を2次元方向に移動する。
上記第1実施形態では、干渉計からの複数の計測値について平均値を算出したが、複数の回転量の平均値を算出するようにしてもよい。
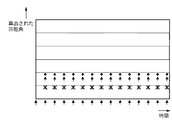
上記第1及び第2実施形態により算出された回転量に対して、任意のオフセットを持たせるようにしてもよい。図9はこの様子を示している。このようなオフセットは、センサーの出力特性によって平均化処理した際に、真値から一定のオフセットを持つような場合、それを補正するために用いられる。
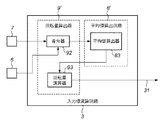
上記第1及び第2実施形態の平均値算出器では、入力された計測値或いは差分値について単純に平均値を算出していた。第4実施形態の平均値算出器では、特異な値については平均値の算出対象から除外することにより、ノイズ等の駆動制御への影響を低減する。以下、図10を参照して説明する。なお、以下の実施形態では、第2実施形態の構成の差分器92から得られた差分値に対して平均値算出器83が特異値の検出を行う場合を説明するが、第1実施形態の構成による各平均値算出器81,82において特異値を検出し除去するように構成してもよいことは明らかであろう。
Claims (10)
- 制御対象の状態値と制御目標値を入力し、該制御対象の制御量を出力する制御サイクルを繰り返す制御手段と、
前記制御対象の位置、速度或いは加速度のいずれかを検出する検出器と、
前記制御サイクルの1サイクル毎に前記検出器から複数の検出値を取得し、該複数の検出値を用いて前記制御手段へ入力する状態値を生成する生成手段とを備えることを特徴とする駆動制御装置。 - 前記生成手段は、前記複数の検出値の平均値に基づいて前記状態値を生成することを特徴とする請求項1に記載の駆動制御装置。
- 前記駆動制御装置は前記検出器を複数含み、
前記生成手段は、前記制御サイクルの1サイクル毎に、
前記複数の検出器のそれぞれについて、取得した複数の検出値の平均値を算出し、
算出された複数の平均値を用いて所定の演算を行うことにより前記状態値を生成することを特徴とする請求項1に記載の駆動制御装置。 - 前記駆動制御装置は前記検出器を複数含み、
前記生成手段は、前記制御サイクルの1サイクル毎に、
前記複数の検出器のうちの選択された検出器より得られる複数の検出値について平均値を算出し、
前記算出された平均値と、残りの検出器の1つの検出値を用いて所定の演算を行うことにより前記状態値を生成することを特徴とする請求項1に記載の駆動制御装置。 - 前記駆動制御装置は複数の検出器を含み、
前記生成手段は、前記制御サイクルの1サイクル毎に、
前記複数の検出器から得られる検出値を用いて所定の演算を実行することにより複数の演算結果を取得し、
前記演算結果の平均値に基づいて前記状態値を生成することを特徴とする請求項1に記載の駆動制御装置。 - 前記生成手段で生成された状態値に更に任意のオフセット値を加減算して前記制御手段へ入力するオフセット手段を更に備えることを特徴とする請求項1乃至5のいずれかに記載の駆動制御装置。
- 前記生成手段において、前記検出器からの、使用すべき検出値の数を設定する設定手段を更に備えることを特徴とする請求項1に記載の駆動制御装置。
- 前記生成手段における平均値の算出において、所定の範囲外の値は平均値の算出対象から除外することを特徴とする請求項2乃至6のいずれかに記載の駆動制御装置。
- 制御対象の状態値と制御目標値を入力し、該制御対象の制御量を出力する制御サイクルを繰り返す制御手段と、前記制御対象の位置、速度或いは加速度のいずれかを検出する検出器とを備えた駆動制御装置による駆動制御方法であって、
前記制御サイクルの1サイクル毎に前記検出器から複数の検出値を取得し、該複数の検出値を用いて状態値を生成する生成工程と、
前記生成工程で生成された状態値を前記制御手段へ入力する入力工程とを備えることを特徴とする駆動制御方法。 - 基板を搭載して移動するステージと、前記ステージに保持された基板に対して所定のパターンを投影する露光手段とを備え、
前記ステージを制御対象として請求項1乃至8のいずれかに記載の駆動制御装置により制御する制御手段とを備えることを特徴とする露光装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004099730A JP2005284867A (ja) | 2004-03-30 | 2004-03-30 | 駆動制御装置及び方法及び露光装置 |
| US11/092,658 US7852033B2 (en) | 2004-03-30 | 2005-03-30 | Driving control apparatus and method, and exposure apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004099730A JP2005284867A (ja) | 2004-03-30 | 2004-03-30 | 駆動制御装置及び方法及び露光装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005284867A true JP2005284867A (ja) | 2005-10-13 |
| JP2005284867A5 JP2005284867A5 (ja) | 2007-05-31 |
Family
ID=35053895
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004099730A Pending JP2005284867A (ja) | 2004-03-30 | 2004-03-30 | 駆動制御装置及び方法及び露光装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7852033B2 (ja) |
| JP (1) | JP2005284867A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009188405A (ja) * | 2008-02-08 | 2009-08-20 | Asml Netherlands Bv | リソグラフィ装置およびキャリブレーション方法 |
| JP2009237664A (ja) * | 2008-03-26 | 2009-10-15 | Taiheiyo Cement Corp | 位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013089804A (ja) * | 2011-10-19 | 2013-05-13 | Renesas Electronics Corp | 半導体装置のスクリーニング装置、半導体装置のスクリーニング方法及びプログラム |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6028889B2 (ja) | 1982-02-12 | 1985-07-08 | 新日本製鐵株式会社 | 焼結用含褐鉄鉱石の事前処理方法 |
| JPS58141341U (ja) | 1982-03-17 | 1983-09-22 | 株式会社クボタ | 刈取収穫機 |
| JPS5936806A (ja) | 1982-08-24 | 1984-02-29 | Mitsuwa Seiki Co Ltd | アクチユエ−タのデイジタル制御方法 |
| JPS62260211A (ja) | 1986-05-06 | 1987-11-12 | Nec Corp | 半導体装置の製造装置 |
| JP2873748B2 (ja) | 1991-06-04 | 1999-03-24 | キヤノン株式会社 | 半導体製造装置 |
| JP3555230B2 (ja) * | 1994-05-18 | 2004-08-18 | 株式会社ニコン | 投影露光装置 |
| JP3428872B2 (ja) * | 1997-08-29 | 2003-07-22 | キヤノン株式会社 | 露光方法および装置 |
| JP3312297B2 (ja) * | 1999-07-02 | 2002-08-05 | 住友重機械工業株式会社 | ステージ位置制御装置 |
| JP2000306829A (ja) | 2000-01-01 | 2000-11-02 | Nikon Corp | 投影露光装置、及び素子製造方法 |
| JP2002033271A (ja) * | 2000-05-12 | 2002-01-31 | Nikon Corp | 投影露光方法、それを用いたデバイス製造方法、及び投影露光装置 |
| SG103303A1 (en) * | 2000-07-07 | 2004-04-29 | Nikon Corp | Exposure apparatus, surface position adjustment unit, mask, and device manufacturing method |
| JP3762307B2 (ja) * | 2001-02-15 | 2006-04-05 | キヤノン株式会社 | レーザ干渉干渉計システムを含む露光装置 |
| JP4046961B2 (ja) | 2001-09-03 | 2008-02-13 | キヤノン株式会社 | 位置検出方法、位置検出装置、露光装置及び露光方法 |
| JP2003086492A (ja) * | 2001-09-12 | 2003-03-20 | Canon Inc | 露光装置及びその制御方法並びにデバイスの製造方法 |
| US6668202B2 (en) * | 2001-11-21 | 2003-12-23 | Sumitomo Heavy Industries, Ltd. | Position control system and velocity control system for stage driving mechanism |
| JP3913079B2 (ja) | 2002-02-28 | 2007-05-09 | キヤノン株式会社 | 面位置検出装置及び方法並びに露光装置と該露光装置を用いたデバイスの製造方法 |
| JP3849932B2 (ja) * | 2002-08-12 | 2006-11-22 | キヤノン株式会社 | 移動ステージ装置 |
-
2004
- 2004-03-30 JP JP2004099730A patent/JP2005284867A/ja active Pending
-
2005
- 2005-03-30 US US11/092,658 patent/US7852033B2/en not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009188405A (ja) * | 2008-02-08 | 2009-08-20 | Asml Netherlands Bv | リソグラフィ装置およびキャリブレーション方法 |
| KR101031274B1 (ko) | 2008-02-08 | 2011-04-29 | 에이에스엠엘 네델란즈 비.브이. | 리소그래피 장치 및 조정 방법 |
| US8248583B2 (en) | 2008-02-08 | 2012-08-21 | Asml Netherlands B.V. | Lithographic apparatus and calibration method |
| JP2009237664A (ja) * | 2008-03-26 | 2009-10-15 | Taiheiyo Cement Corp | 位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US7852033B2 (en) | 2010-12-14 |
| US20050219500A1 (en) | 2005-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4878831B2 (ja) | リソグラフィ装置及びデバイス製造方法 | |
| KR101913273B1 (ko) | 광학장치, 투영 광학계, 노광 장치, 및 물품의 제조 방법 | |
| JP4734298B2 (ja) | リソグラフィ装置およびデバイス製造方法 | |
| JP2008180560A (ja) | 位置検出回路及びその応用装置 | |
| JP6316800B2 (ja) | 半導体検査ツールにおいてサンプルステージの運動を時間遅延積分電荷結合素子で同期させる装置および方法 | |
| JP3352286B2 (ja) | 位置制御方法及び装置並びにそれを使用した半導体製造装置 | |
| KR101697231B1 (ko) | 노광 장치 및 디바이스 제조 방법 | |
| US7852033B2 (en) | Driving control apparatus and method, and exposure apparatus | |
| JPH0927443A (ja) | ステージ駆動制御装置 | |
| JP5473575B2 (ja) | 露光装置及びデバイス製造方法 | |
| JP2012133122A (ja) | 近接露光装置及びそのギャップ測定方法 | |
| JP2007079837A (ja) | ヘッド作動制御装置及び制御方法及びステージ装置 | |
| KR20220046483A (ko) | 위치결정 장치, 리소그래피 장치, 및 물품 제조 방법 | |
| JP2000065970A (ja) | Xyステージ | |
| JP2019056875A (ja) | 露光方法および露光装置 | |
| JP2010039003A (ja) | ステージ装置、露光装置、及びステージ制御方法 | |
| JP2010266330A (ja) | 平面モータ | |
| JP2012112919A (ja) | レーザートラッカー | |
| JP2007263902A (ja) | Xyステージ | |
| JP2007025888A (ja) | 制御装置及び制御方法 | |
| JP2007213342A (ja) | テーブル位置制御装置及びテーブル移動装置 | |
| JP2001175332A (ja) | ステージの駆動方法、ステージ装置及び露光装置 | |
| JP2023068825A (ja) | 荷電粒子線装置 | |
| JP3744107B2 (ja) | ステージ移動装置 | |
| JPH06302497A (ja) | ステージ位置決め方法及びその装置、並びに、これを利用した同期位置決めシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070330 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070406 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090610 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090615 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091016 |