EP2372886B1 - Linear motor - Google Patents
Linear motor Download PDFInfo
- Publication number
- EP2372886B1 EP2372886B1 EP09834910.3A EP09834910A EP2372886B1 EP 2372886 B1 EP2372886 B1 EP 2372886B1 EP 09834910 A EP09834910 A EP 09834910A EP 2372886 B1 EP2372886 B1 EP 2372886B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- permanent magnet
- magnet row
- linear motor
- coil
- phase coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 claims description 13
- 230000004907 flux Effects 0.000 claims description 13
- 230000005284 excitation Effects 0.000 claims description 8
- 230000005415 magnetization Effects 0.000 claims description 8
- 239000013598 vector Substances 0.000 claims description 5
- 230000005540 biological transmission Effects 0.000 claims description 4
- 239000004020 conductor Substances 0.000 claims 1
- 238000000034 method Methods 0.000 description 13
- 238000004804 winding Methods 0.000 description 10
- 239000003990 capacitor Substances 0.000 description 5
- 238000009499 grossing Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 4
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- 238000010304 firing Methods 0.000 description 2
- 238000003491 array Methods 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/06—Linear motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/278—Surface mounted magnets; Inset magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/035—DC motors; Unipolar motors
- H02K41/0352—Unipolar motors
- H02K41/0354—Lorentz force motors, e.g. voice coil motors
- H02K41/0356—Lorentz force motors, e.g. voice coil motors moving along a straight path
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/17—Stator cores with permanent magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
Definitions
- the present invention relates to a linear motor which is capable of making a high speed response and obtains a greater thrust with a lighter weight.
- Patent Document 1 To substitute a Halbach array for a conventional field magnet which is configured by an iron core and permanent magnets for the purpose of increasing torque is widely employed as a usage of the Halbach array, as disclosed in Patent Document 1 and Patent Document 2.
- Patent Document 3 an inertia moment of a rotary part of a motor wheel is reduced by configuring a wheel-in motor with use of magnets having a smaller density than iron in a side of an outer rotor.
- a magnetic path is formed by using an iron core in a side of an armature, and is thus configured to reduce magnetic resistance of a magnetic circuit formed by a field magnet.
- Patent Document 4 discloses a linear motor in which field magnets constructed in a Halbach array on yokes are opposed to each other over a gap, to arrange an armature coil wire in a plane in the gap.
- Patent Document 5 discloses a linear motor using a Halbach array which employs no iron core.
- field magnets are formed by columnar permanent magnet rows, and an armature coil is arranged so as to be wound about one of the field magnets of the permanent magnet rows which are opposed to each other over a gap. Therefore, a part of the armature coil is not linked with magnetic fluxes generated by the field magnets, and a generated thrust therefore lowers as a problem.
- CN-A-101 127 474 discloses a linear motor according to the preamble of claim 1.
- the present invention has been made based on such situations and has an object of providing a linear motor which lowers a weight/thrust ratio, suppresses power consumption, and reduces operation costs.
- a linear motor of the present invention comprises the features of claim 1.
- strong magnetic fluxes can be linked with an armature coil without using an iron core, and the whole armature coil is linked with magnetic fluxes of field magnets.
- a strong magnetic field is linked with a whole armature coil, and a weight/thrust ratio can be therefore reduced. Accordingly, power consumption during operation can be suppressed, and operating costs can be reduced.
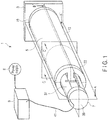
- FIGS. 1 , 2 , 3 , and 4 show a configuration of a linear motor according to the first embodiment of the invention. The whole configuration is denoted at 1.
- the linear motor 1 comprises: a columnar stator 5 which is attached by an unillustrated predetermined method to a fixing member 3 fixed to a ground side; a cylindrical needle 7 which is positioned in a side opposite to the fixing member 3 and is movable in an axial direction of the stator 5; and a driving device 9 which supplies the needle 7 with an electric power from an external power supply 8.
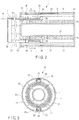
- the stator 5 comprises: an outer permanent magnet row 11 as a first permanent magnet row which is configured by arranging pairs of arcuate permanent magnets to be adjacent to each other in a manner that magnetic poles of each of the pairs of the arcuate permanent magnets are rotated by 90 degrees in a cross-section including center axes of the magnets; an outer pipe 13 as a first annular fixing member, to an inner surface of which the first permanent magnet row is fixed by a predetermined method; an inner permanent magnet row 15 as a second permanent magnet row which has magnetization vectors having radial directional components directed in the same directions as the outer permanent magnet row 11, and having axial directional components directed in the opposite directions to those of the outer permanent magnet row 11; an inner pipe 17 as a second annular fixing member, to which the inner permanent magnet row 15 is fixed by a predetermined method; a fixing disc 19 which fixes the outer pipe 13 and inner pipe 17 in a side of the fixing member 3 by an unillustrated predetermined method; and a fixing plate 23 which is notched so as not to interfere
- support plates 25 are fixed by a predetermined method, as positioning members to prevent the outer permanent magnet row 11 from moving in inner circumferential directions.
- the support plates 25 may be fixed to the outer pipe 13 and to the outer permanent magnet row 11.
- the first and second permanent magnet rows have substantially equal magnetization energies. Therefore, a very large number of magnetic fluxes directed in radial directions are distributed in a gap between the outer permanent magnet row 11 and the inner permanent magnet row 15.
- the needle 7 comprises: a winding ring 33 having a U-shaped cross-section about which a three-phase coil 31 is wound; linear bushes 35 which are attached to upper and lower four corners of the winding ring 33, and guide the winding ring 33 along the guide rods 21; an output ring 37 which is fixed to the winding ring 33 by an unillustrated method and comprises notched parts; and a notch fixing plate 39 which fixes the notched parts of the output ring 37 by an unillustrated method. Further, a lead path 43 for leading a lead line 41 as an electric-power transmission means for leading a three-phase alternating power to the three-phase coil 31 is provided in the output ring 37 and the notch fixing plate 39.
- the winding ring 33 and the linear bushes 35 function as a coil support means. Since the three-phase coil 31 is positioned in a gap where a very large number of magnetic fluxes in radial directions exist, most of the magnetic fluxes are linked at right angles with the three-phase coil 31. Therefore, a greater thrust is generated by a smaller current.
- the lead line 41 is connected to the driving device 9 as a coil excitation means.
- the driving device 9 comprises a power converter 53 and a source power converter 55 which transfer and receive an electric power through a bus line 51.
- a smoothing capacitor 57 as a power storage means and an electric storage device 59 also as a power storage means are connected to the bus line 51. Therefore, voltage fluctuation of the bus line 51 is reduced to be small even when the three-phase coil 31 consumes an electric power and when an electric power is recovered from the three-phase coil 31.
- the electric storage device 59 comprises a battery 61, a resistor 63, and a diode 65. When an electric power is supplied from the battery 61, the resistor 63 does not consume the electric power. When the battery 61 is electrically charged, the charged power is partially consumed by the resistor 63. In this manner, excessive charging of the battery 61 is restricted.
- one smoothing capacitor 57 and one electric storage device 59 are shown, a plurality of smoothing capacitors 57 as well as electric storage devices 59 may be provided at appropriated positions on the bus line 51.
- the power converter 53 comprises a PWM inverter 67 and a thrust controller 69.
- the thrust controller 69 controls a firing angle for an unillustrated power converter element group in the PWM inverter 67 so that a thrust equal to a thrust instruction value input to the thrust controller 69 from outside of the driving device 9 is generated at the three-phase coil 31.
- the supply power converter 55 comprises an inverter 71 and a regenerative-power reception controller 73. Based on an external regenerative-power-reception instruction signal, the regenerative-power reception controller 73 regenerates an electric power stored in the smoothing capacitor 57 and battery 61 to the power supply 8, and controls a firing angle of the inverter 71 to store an electric power from the power supply 8.
- the thrust controller 69 comprises: current sensors 75 which detect at least excitation currents at phases U and W among phases U, V, and W of the three-phase coil 31; and a position sensor 77 which detects a relative position of the three-phase coil 31 relative to the outer permanent magnet row 11. Torque control is performed based on signals from these sensors.
- the position sensor 77 comprises: a scale 79 which is attached to an upper part of an inner surface of the outer pipe 13 of the stator 5; and an optical pickup 81 which detects a gauge of the scale 79. Needless to say, detected position information is introduced into the driving device 9 through an unillustrated position-sensor output line bundled in the lead line 41. The position information from the position sensor 77 is converted into moving distance information of the needle 5 by the thrust controller 69, and is output to outside of the driving device 9. In this manner, an external control device is allowed to perform speed control and positioning control of the needle 5.
- the needle 7 stops without outputting any thrust. If a thrust instruction value is then introduced into the driving device 9 from an external control device, for example, to move the needle 7 to a predetermined position, the current sensors 75 for the phases U and W detect excitation currents of the three-phase coil 31. Further, the position sensor 77 detects a relative position of the three-phase coil 31 in relation to the outer and inner permanent magnet rows 11 and 15. The thrust controller 69 excites the three-phase coil 31 by an excitation current at which a thrust equal to the thrust instruction value is to be generated. Then, the needle 7 starts moving toward the predetermined position by the thrust generated by the three-phase coil 31. The needle 7 continues moving in accordance with predetermined control, such as speed control and positioning control.
- predetermined control such as speed control and positioning control.
- the needle 7 reaches the predetermined position, and operation of the linear motor 1 then ends.
- the external thrust instruction value then becomes zero, which is introduced to the thrust controller 69.
- the excitation current to the three-phase coil 31 then becomes zero, and the device stops again.
- a self inductance of the three-phase coil 31 is small since neither an iron core nor a yoke exists within main magnetic fluxes created by the inner and outer permanent magnet rows 11 and 15 or near the three-phase coil 31. Therefore, even if the needle 7 moves at a high speed, a voltage required for electrically conducting a predetermined excitation current to the three-phase coil 31 is reduced, and a requested voltage for the power supply 8 is reduced. Further, since the needle 7 requires neither an iron core nor a yoke, weight reduction is achieved, and a large part of the three-phase coil 31 is linked with the main magnetic fluxes created by the outer and inner permanent magnet rows 11 and 15. Therefore, the thrust/weight ratio improves. Accordingly, the controllability improves in making the needle 7 respond at a high speed, and contributes to energy saving.
- the permanent magnet rows are configured as stators.
- this configuration does not limit use of the permanent magnet rows as stators.
- a coil support means is configured to be fixed to the ground side and if permanent magnet rows are configured as needles.
- the lead line 41 is not applied with any force, and risks of disconnections and damages are avoidable. Therefore, reliability improves advantageously.
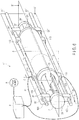
- a linear motor according to the present embodiment is denoted, as a whole, at 1'.
- the linear motor 1' comprises: a stator 5 which is fixed to a ground side by an unillustrated means which uses an outer permanent magnet row 11' and an inner permanent magnet row 15' as stator field magnets; a needle 7 which uses a three-phase coil 31 as an armature; and a driving device 9.
- the stator 5 comprises: an outer permanent magnet row 11', as a first permanent magnet row, which is configured by arranging ring permanent magnets to be adjacent to each other in a manner that magnetic poles of the ring permanent magnets are rotated by 90 degrees in a cross-section including center axes of the magnets; an outer pipe 13; an inner permanent magnet row 15; an inner pipe 17; and fixing plates 23 which are notched so as not to interfere with the needle 7 and fix the outer pipe 13 and the inner pipe 17 by an unillustrated predetermined method.
- the first and second permanent magnet rows have substantially equal magnetization energies. Therefore, a very large number of magnetic fluxes are distributed in a gap between the outer permanent magnet row 11' and the inner permanent magnet row 15.
- guide rods 21' are attached to outer upper and lower parts of the outer pipe 13 through guide-rod support members 111 and 113.
- electrodes 103, 105, 107, and 109 each divided into two upper and lower halves are fixed to surfaces of the guide rods 21'.
- Lead lines 41 from the respective electrodes are bundled by a predetermined method, and are introduced into the driving device 9 through lead paths 43 provided in the guide-rod support members 111.
- An optical pickup 81 for detecting a gauge of a scale 79 which the needle 7 comprises is attached at a predetermined position to one of the fixing plates 23.
- the needle 7 comprises: a winding ring 33; an output ring 37 which is fixed to two ends of the winding ring 33 by an unillustrated method and comprises notched parts; a notch fixing plate 39 which fixes the notched parts of the output ring 37 by an unillustrated method; and linear bushes 35' and 35" which are attached to ends of the output ring 37, and guide the winding ring 33 along the guide rods 21'.
- the linear bushes 35' each comprise a slidable electrode 101 which makes contact with the electrodes 103, 105, 107, and 109 provided on a surface of a guide rod 21'.
- the lead lines 41 connected at one ends to a three-phase coil 31 are connected to the slidable electrodes 101 through the lead paths 43 provided in the output ring 37 and the linear bushes 35'.
- the three-phase coil 31 is electrically connected to the driving device 9 through the electrodes 103, 105, 107, and 109 in the side of the stator 5.
- currents having phases U, V, and W corresponding to three-phase alternating-current voltages generated by the driving device 9 and a neutral current are made to flow respectively through the electrodes 103, 105, 107, and 109, and the three-phase coil 31 is excited, to move the needle 7 at a predetermined thrust.
- the winding ring 33 and linear bushes 35' and 35" function as a coil support means.
- the lead lines 41, slidable electrodes 101, and electrodes 103, 105, 107, and 109 function as an electric-power transmission means.
- a scale and an optical pickup are used for a position sensor for obtaining position information of a needle in relation to a stator.
- This use does not limit a means for obtaining position information.
- a magnetic position sensor or a sensorless method of estimating a position from a counter electromotive force of a three-phase coil 31 may be Used.
- each, either permanent magnet rows or a coil support means is configured as a stator.
- This configuration does not limit use of either permanent magnet rows or a coil support means as a stator.
- Both the coil support means and permanent magnet row may be configured to be movable and to move relatively to each other.
- the invention can be variously modified without departing from the scope of the invention as defined by the claims.
- the invention is not limited just to the foregoing embodiments but can be embodied with constitutive elements modified in a practical phase without departing from the scope of the invention.
- Further various embodiments may be derived by appropriately combining a plurality of constitutive elements disclosed in the foregoing embodiments. For example, several constitutive elements may be omitted from the whole constitutive elements disclosed in the foregoing embodiments. Such constitutive elements may be appropriately combined between different embodiments.
- PWM inverter 69... Thrust controller, 71... Inverter, 73... Regenerative-power reception controller, 75... Current sensor, 77... Position sensor, 79... Scale, 81... Optical pickup, 101... Slidable electrode, 103, 105, 107, 109... Electrode
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Linear Motors (AREA)
- Control Of Linear Motors (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008331349A JP5404029B2 (ja) | 2008-12-25 | 2008-12-25 | リニア電動機 |
| PCT/JP2009/071378 WO2010074112A1 (ja) | 2008-12-25 | 2009-12-24 | リニア電動機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2372886A1 EP2372886A1 (en) | 2011-10-05 |
| EP2372886A4 EP2372886A4 (en) | 2017-08-09 |
| EP2372886B1 true EP2372886B1 (en) | 2019-10-02 |
Family
ID=42287719
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP09834910.3A Active EP2372886B1 (en) | 2008-12-25 | 2009-12-24 | Linear motor |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2372886B1 (ja) |
| JP (1) | JP5404029B2 (ja) |
| CN (1) | CN102265490B (ja) |
| BR (1) | BRPI0923573A2 (ja) |
| WO (1) | WO2010074112A1 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5596613B2 (ja) * | 2011-04-18 | 2014-09-24 | 株式会社ソディック | リニアモータ |
| JP5370697B2 (ja) * | 2011-05-13 | 2013-12-18 | 株式会社安川電機 | リニアモータ |
| JP2013215021A (ja) * | 2012-03-30 | 2013-10-17 | Kogakuin Univ | 電磁誘導装置 |
| JP2013229247A (ja) * | 2012-04-26 | 2013-11-07 | Toshiba Corp | 電力用開閉装置、及びその操作機構 |
| JP6189028B2 (ja) * | 2012-10-22 | 2017-08-30 | 株式会社東芝 | 電力用開閉装置、及びその操作機構 |
| DE102012025323A1 (de) * | 2012-12-22 | 2014-06-26 | Festo Ag & Co. Kg | Verfahren zum Betreiben einer Linearmotoranordnung und Linearmotoranordnung |
| JP2015043656A (ja) * | 2013-08-26 | 2015-03-05 | 株式会社東芝 | 開閉器 |
| CN103618430B (zh) * | 2013-12-12 | 2015-12-16 | 中国船舶重工集团公司第七0四研究所 | 圆筒式与扁平式混合结构的直线电机 |
| CN103647431B (zh) * | 2013-12-16 | 2015-12-02 | 江苏大学 | 次级模块化各极独立式永磁直线容错电机 |
| WO2015160638A1 (en) * | 2014-04-16 | 2015-10-22 | Nucleus Scientific, Inc. | Magnetic position coupling and valve mechanism |
| US10985633B2 (en) | 2014-06-10 | 2021-04-20 | The Regents Of The University Of Michigan | Vibrational energy harvester with amplifier having gear assembly |
| WO2015191045A1 (en) * | 2014-06-10 | 2015-12-17 | The Regents Of The University Of Michigan | Electromagnetic energy transducer |
| CN105449976B (zh) * | 2014-08-28 | 2018-06-01 | 上海微电子装备(集团)股份有限公司 | 一种永磁直线电机的驱动装置及控制方法 |
| CN104319976B (zh) * | 2014-11-18 | 2017-01-18 | 南京航空航天大学 | 内电枢磁场增强型永磁磁通切换直线电机 |
| CN105811730B (zh) * | 2014-12-30 | 2018-06-29 | 上海微电子装备(集团)股份有限公司 | 一种六自由度直线电机 |
| CN104578681B (zh) * | 2015-01-21 | 2017-03-22 | 朱福善 | 一种触发式无刷直流直线电动机的构成及驱动方法 |
| JP5870326B1 (ja) * | 2015-01-22 | 2016-02-24 | サンテスト株式会社 | ボイスコイルモータ及びこのボイスコイルモータを用いた直動型サーボ弁 |
| KR20160091057A (ko) | 2015-01-23 | 2016-08-02 | 에이텍 코퍼레이션 | 전자 유도 장치 |
| CN104953784A (zh) * | 2015-06-25 | 2015-09-30 | 金陵科技学院 | 一种低速筒形双动子永磁直线发电机 |
| JP6586027B2 (ja) * | 2016-02-16 | 2019-10-02 | 株式会社日立製作所 | リニアモータおよび遮断装置 |
| US20180062491A1 (en) * | 2016-08-25 | 2018-03-01 | United States Department Of The Navy | Interstructural and Inertial Actuator |
| JP7211625B2 (ja) | 2016-09-13 | 2023-01-24 | インディゴ テクノロジーズ, インク. | マルチバーリンク機構電気駆動システム |
| JP2018113749A (ja) * | 2017-01-10 | 2018-07-19 | 橘コンサルタンツ株式会社 | エネルギー変換機 |
| WO2019045017A1 (ja) | 2017-08-30 | 2019-03-07 | 学校法人工学院大学 | 電磁装置 |
| WO2019082785A1 (ja) | 2017-10-25 | 2019-05-02 | 株式会社ミツバ | モータの回転方向検出装置および回転方向検出方法ならびにモータ制御装置 |
| RU191798U1 (ru) * | 2019-04-15 | 2019-08-22 | Валерий Петрович Бордыков | Линейный электрический двигатель |
| CN112242785B (zh) * | 2019-07-17 | 2022-06-14 | 华为技术有限公司 | 一种直线电机、镜头组件及电子设备 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6292757A (ja) * | 1985-10-16 | 1987-04-28 | Sumitomo Special Metals Co Ltd | ボイスコイルモ−タ |
| JP3945916B2 (ja) * | 1998-09-04 | 2007-07-18 | 三洋電機株式会社 | 可動鉄心型リニアモータ |
| JP2001008430A (ja) * | 1999-06-16 | 2001-01-12 | Nikon Corp | モータ装置、ステージ装置、及び露光装置 |
| JP2001086725A (ja) * | 1999-09-10 | 2001-03-30 | Nikon Corp | リニアモータ、並びにこれを用いたステージ装置及び露光装置 |
| JP3832556B2 (ja) * | 2000-02-25 | 2006-10-11 | 株式会社安川電機 | キャンド・リニアモータ |
| JP2003333823A (ja) * | 2002-05-13 | 2003-11-21 | Yaskawa Electric Corp | ボイスコイル形リニアモータ |
| JP2004350427A (ja) | 2003-05-22 | 2004-12-09 | Denso Corp | 回転電機とその回転子 |
| JP4728639B2 (ja) | 2004-12-27 | 2011-07-20 | 株式会社デンソー | 電動車輪 |
| JP2006262603A (ja) | 2005-03-16 | 2006-09-28 | Asmo Co Ltd | 回転電機 |
| JP2007019127A (ja) | 2005-07-06 | 2007-01-25 | Yaskawa Electric Corp | 周期磁界発生装置およびそれを用いたリニアモータ |
| JP2007082352A (ja) | 2005-09-15 | 2007-03-29 | Institute Of Physical & Chemical Research | リニアアクチュエータ |
| CN101127474B (zh) * | 2007-09-19 | 2010-07-14 | 南京理工大学 | 高功率密度的动圈式永磁直线电机 |
-
2008
- 2008-12-25 JP JP2008331349A patent/JP5404029B2/ja not_active Expired - Fee Related
-
2009
- 2009-12-24 WO PCT/JP2009/071378 patent/WO2010074112A1/ja active Application Filing
- 2009-12-24 CN CN2009801518829A patent/CN102265490B/zh not_active Expired - Fee Related
- 2009-12-24 EP EP09834910.3A patent/EP2372886B1/en active Active
- 2009-12-24 BR BRPI0923573A patent/BRPI0923573A2/pt not_active IP Right Cessation
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2372886A1 (en) | 2011-10-05 |
| JP2010154688A (ja) | 2010-07-08 |
| BRPI0923573A2 (pt) | 2016-01-26 |
| EP2372886A4 (en) | 2017-08-09 |
| WO2010074112A1 (ja) | 2010-07-01 |
| CN102265490A (zh) | 2011-11-30 |
| JP5404029B2 (ja) | 2014-01-29 |
| CN102265490B (zh) | 2013-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2372886B1 (en) | Linear motor | |
| US7592728B2 (en) | Electric machine having segmented stator | |
| JP2019024296A (ja) | 回転電機 | |
| US9461511B2 (en) | Electric machine with permanently excited armature and associated permanently excited armature | |
| CN109672276B (zh) | 一种交替极永磁偏置无轴承双凸极电机及其控制方法 | |
| US20200303973A1 (en) | Rotating electric device | |
| CN101847918A (zh) | 用于智能致动器的优化电动机器 | |
| JP2013215021A (ja) | 電磁誘導装置 | |
| TW201136107A (en) | Linear motor | |
| JP2009201343A (ja) | 永久磁石回転電機 | |
| US20110037337A1 (en) | Rotary electromagnetic machines | |
| CN102160267B (zh) | 永磁型步进电动机 | |
| CN111247736A (zh) | 防止电机中的永磁体消磁的系统和方法 | |
| US20210313851A1 (en) | Multi-Layer Axial and Radial flux Vernier Permanent Magnet Motor | |
| Sangha et al. | Design and test results for dual-lane fault-tolerant PM motor for safety critical aircraft actuator | |
| CN112994390A (zh) | 一种双转子径向永磁电动机 | |
| US11462955B2 (en) | Electric rotating machine, electric rotating machine system, vehicle, power generator, lifting device, and robot | |
| RU2599056C1 (ru) | Высокоскоростной многофазный синхронный генератор | |
| JP6958504B2 (ja) | 回転電機の固定子 | |
| CN104137394A (zh) | 电机 | |
| CN110994822B (zh) | 一种具有自适应磁场修正能力的定子结构 | |
| US20130009523A1 (en) | Electromechanical device, robot, and mobile unit | |
| JP4238298B1 (ja) | 磁束分流制御回転電機システム | |
| Popa et al. | Theoretical and experimental study of a modular tubular transverse flux reluctance machine | |
| Hsiao et al. | Integrated Design and Power Loss Minimization of Reaction Wheel Motor for Satellite Attitude Control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20110620 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: H02K 41/03 20060101AFI20170309BHEP Ipc: H02P 25/06 20160101ALI20170309BHEP |
|
| RA4 | Supplementary search report drawn up and despatched (corrected) |
Effective date: 20170710 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: H02K 41/03 20060101AFI20170704BHEP Ipc: H02P 25/06 20160101ALI20170704BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20180503 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20190531 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1187305 Country of ref document: AT Kind code of ref document: T Effective date: 20191015 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602009060033 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20191002 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1187305 Country of ref document: AT Kind code of ref document: T Effective date: 20191002 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200203 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200102 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200103 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200102 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200224 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602009060033 Country of ref document: DE |
|
| PG2D | Information on lapse in contracting state deleted |
Ref country code: IS |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200202 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20191231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 |
|
| 26N | No opposition filed |
Effective date: 20200703 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20200102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200102 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191224 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191231 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191231 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20091224 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191002 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20231110 Year of fee payment: 15 Ref country code: FR Payment date: 20231108 Year of fee payment: 15 Ref country code: DE Payment date: 20231031 Year of fee payment: 15 |