EP1426499A1 - Procédé et appareil d'amortissement des fins de course d'un cylindre hydraulique utilisé dans des engins de travaux publics - Google Patents
Procédé et appareil d'amortissement des fins de course d'un cylindre hydraulique utilisé dans des engins de travaux publics Download PDFInfo
- Publication number
- EP1426499A1 EP1426499A1 EP03021744A EP03021744A EP1426499A1 EP 1426499 A1 EP1426499 A1 EP 1426499A1 EP 03021744 A EP03021744 A EP 03021744A EP 03021744 A EP03021744 A EP 03021744A EP 1426499 A1 EP1426499 A1 EP 1426499A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- speed
- hydraulic cylinder
- detection device
- hydraulic
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B21/00—Common features of fluid actuator systems; Fluid-pressure actuator systems or details thereof, not covered by any other group of this subclass
- F15B21/02—Servomotor systems with programme control derived from a store or timing device; Control devices therefor
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
- E02F9/2214—Arrangements for controlling the attitude of actuators, e.g. speed, floating function for reducing the shock generated at the stroke end
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/04—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed
- F15B11/046—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed depending on the position of the working member
- F15B11/048—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed depending on the position of the working member with deceleration control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20546—Type of pump variable capacity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20576—Systems with pumps with multiple pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/305—Directional control characterised by the type of valves
- F15B2211/30525—Directional control valves, e.g. 4/3-directional control valve
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/315—Directional control characterised by the connections of the valve or valves in the circuit
- F15B2211/3157—Directional control characterised by the connections of the valve or valves in the circuit being connected to a pressure source, an output member and a return line
- F15B2211/31588—Directional control characterised by the connections of the valve or valves in the circuit being connected to a pressure source, an output member and a return line having a single pressure source and multiple output members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/32—Directional control characterised by the type of actuation
- F15B2211/327—Directional control characterised by the type of actuation electrically or electronically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6336—Electronic controllers using input signals representing a state of the output member, e.g. position, speed or acceleration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/705—Output members, e.g. hydraulic motors or cylinders or control therefor characterised by the type of output members or actuators
- F15B2211/7051—Linear output members
- F15B2211/7053—Double-acting output members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/71—Multiple output members, e.g. multiple hydraulic motors or cylinders
- F15B2211/7114—Multiple output members, e.g. multiple hydraulic motors or cylinders with direct connection between the chambers of different actuators
- F15B2211/7128—Multiple output members, e.g. multiple hydraulic motors or cylinders with direct connection between the chambers of different actuators the chambers being connected in parallel
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/715—Output members, e.g. hydraulic motors or cylinders or control therefor having braking means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/755—Control of acceleration or deceleration of the output member
Definitions
- the present invention relates to a method and a device for damping movement of hydraulic cylinders of mobile machines, in particular Hydraulic excavators, whereby reaching is achieved by means of a position detection device a pre-end position of the hydraulic cylinder is detected before it is reached the end positions of the hydraulic cylinder reduces its speed of movement and the hydraulic cylinder to the respective end position at a reduced speed is driven.
- a flow control element for throttling the inlet and / or the flow of the hydraulic cylinder provided by a Control device is activated accordingly when the pre-end position is reached, in order to throttle the volume flow that flows into and out of the hydraulic cylinder flows.
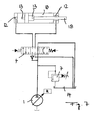
- Figure 7 shows a hydraulic solution.
- the drive takes place of hydraulic cylinders of earth-working machines such as hydraulic excavators and the like regularly via a hydraulic pump 1 and a downstream one Directional control valve 4.
- the hydraulic cylinder 10 are in the end area of the piston and rod Geometric changes 13 attached, which changed when entering the Geometry 12 of the cylinder housing pressure build-up of the returning fluid cause.
- the speed of the cylinder is determined by the delivery rate of the hydraulic pump 1 determined in the inlet to the cylinder.
- a damping effect only arises if the quantity in the feed to the cylinder is reduced.
- a reduction can only be achieved by either the controller R of the pump 1 or a pressure relief valve 7 connected in the hydraulic circuit responds.
- the response of the pump regulator or the pressure relief valve is determined by the inlet pressure reached, which means that the dynamic pressure on the discharge side accordingly the ratio of the hydraulic cylinder must increase.
- the pressure regulator of the pump or the pressure relief valve responds depending on Machine size between 300 and 350 bar pressure, so that on the inlet side of the Hydraulic cylinder a back pressure of 600 to 700 bar is required.
- the dynamic pressure is reduced by throttling at the annular gap and special throttle cross sections reached, the throttling effect at the annular gap strongly dependent on the manufacturing tolerances and the viscosity of the fluid. Because of these deviations of geometry and fluid parameters the probability is high that either the dynamic pressure is not sufficient to activate the regulating elements, or that the dynamic pressure rises so high that the strength of the cylinder housing is at risk.
- the present invention is therefore based on the object of an improved Method and an improved device for damping the movement of hydraulic cylinders to create the disadvantages of Avoid prior art and further develop the latter in an advantageous manner.
- the mechanical end stop should be driven too high Speed safely avoided while still maintaining the kinematics of the hydraulic cylinder be fully exploited.
- a speed detection device which the speed of movement of the hydraulic cylinder before reaching the respective end position recorded.
- the control device which is the flow control element controls for throttling the inflow or outflow comprises a delay device, with the help of which the start time of the throttling depending on the detected movement speed is changed.
- the flow control element is therefore dependent on the detected speed of movement of the hydraulic cylinder actuated sooner or later, so that the movement damping or speed reduction of the hydraulic cylinder sooner or later starts.
- the movement damping can in particular be related to the speed of movement be adjusted so that on the one hand reaching the mechanical End stop occurs, on the other hand reaching the end stop but only at the desired minimum speed.
- the throttle speed of the flow element i.e. the speed, with which the volume flow is shut down can be changed.
- the throttle speed of the flow control member regardless of the detected movement speed of the hydraulic cylinder is specified.
- the adjustment of the motion damping becomes alone thereby achieved that the start time of the throttling or the actuation time of the flow control element as a function of the detected speed is moved.
- it is quite possible here if several are used Flow control elements the actuation times of the control elements different to shift, so that there is a different damping characteristic overall results.
- Throttle speed per se are kept the same.
- the start of damping is expedient with decreasing movement speed of the hydraulic cylinder is delayed, i.e. pushed back in time.
- Control device designed such that a fixed start time then always is specified if the detected movement speed is greater than or equal to is a predetermined limit speed, i.e. So that of the piston position detection device detected final position with a limit speed or at an even greater speed. In this case the damping initiated immediately. Is the movement speed recorded in the pre-end position however, below the limit speed, the starting time damping delayed by a certain period of time.
- the timespan, around the start of the damping or the time of actuation of the flow control member can be moved by the control device can be set variably.
- the control device preferably changes the Time span by which the damping is shifted, proportional to the detected one Speed when reaching the pre-end position.
- the speed detection device can have two end signal generators arranged one behind the other, which shortly before reaching the end position of the piston are run over, and a time recording device comprise the time span between the signals of the two end signal generators detected.
- the time span recorded, the crossing of the two arranged one behind the other End signal generator lasts, is then in a comparison device of the control device compared with a predetermined period of time. If the difference is negative, i.e. the recorded time is less than the specified time, the fixed earliest possible starting time of the damping determined by the control device. is the difference is positive, i.e. the recorded time is greater than the specified time, the Amount of the difference between the delay in the start of damping. In particular the starting time can be determined by the amount of the difference be moved backwards.
- the speed detection device or its end signal generator can basically arranged at different locations and assigned to the hydraulic cylinder his.
- first and second markings can be provided, each one of the two end positions or pre-end positions of the piston. Both marks can are detected by a correspondingly arranged pair of end signal transmitters. It is accordingly only one detection device for detecting both end positions or only one detection device for detecting the speed Reaching both end positions provided.
- the detection devices can preferably be integrated in the hydraulic cylinder be arranged in particular in the region of the collar of the hydraulic cylinder through which the piston rod exits.
- one of Hydraulic cylinder separate, but with this coupled detection transmitter provided be that moves according to the movement of the hydraulic cylinder.
- a rotary turntable can be provided here, the two Has markings of the aforementioned type. The position of the markings can be detected by appropriate end signal transmitters.
- the hydraulic cylinders 10 and 11 for example, the Lifting cylinders of a hydraulic excavator can be driven by a hydraulic drive, of the three hydraulic pumps 1, 2 and 3, each with one Regulator R can be regulated.
- the three hydraulic pumps 1, 2 and 3 are over one directional control valve 4, 5 and 6 each connected to the hydraulic cylinders 10 and 11, which are also connected in parallel to each other.
- the directional valves 4, 5 and 6 Through the directional valves 4, 5 and 6 the inlets and outlets of the hydraulic cylinders 10 and 11 separated from the respective pumps 1, 2 and 3 and blocked or with the pump are brought into flow connection, the flow direction is reversible so that the hydraulic cylinders are extended and retracted can be.
- the directional control valves 4, 5 and 6 are controlled by an electronic control device 15 driven to control the movement of the hydraulic cylinders 10 and 11.
- the movement of the hydraulic cylinders 10 and 11 is on the one hand by a position detection device 17 monitors the approach of the piston rod to the indicates both end positions, in particular reaching a pre-end position indicates. On the other hand, by means of a speed detection device 16 detects the speed of the piston rod of the hydraulic cylinders 10 and 11, if they reach the above end position.
- Figure 3 shows a speed detection device 16 in its simplest form.
- the speed is measured in each of the pre-end positions of the piston of the hydraulic cylinder by means of two limit switches S 1 and S 2 or S 3 and S 4 .
- a marking is attached to the piston rod 18, which is detected by the limit switches S 1 to S 4 when the piston rod is moved past it.
- the limit switches can be mechanical switches or inductive sensors.
- the limit switches S 1 to S 4 are assigned a time recording device 19 in the control device 15, which determines the time span that the successively arranged limit switches S 1 and S 2 or S 3 and S 4 take. The time it takes to drive over a pair of limit switches is a measure of the piston speed when the pre-end position is reached.
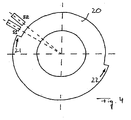
- FIG. 4 shows a simplified solution of a speed detection device 16.
- the limit switches S 1 and S 2 are not arranged directly on the hydraulic cylinder or are not assigned directly to the piston rod 18, but are attached to the pivot point of corresponding equipment parts which are relative to one another by the hydraulic cylinders 10 and 11 be moved.
- the rotary detection disc 20 with a moving part such. B. on the spoon with the bearing block of a hydraulic excavator or be formed by part of the bearing block.
- the limit switches in the form of inductive sensors S 1 and S 2 can with the counterpart, for. B. the arm of the hydraulic excavator.
- the markings 21, 22 are attached to the detection disk 20 such that they reach the limit switches S 1 and S 2 when the hydraulic cylinder reaches one of its pre-end positions.
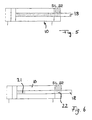
- FIG. 5 Another preferred embodiment of a speed detection device 16 is shown in FIG. 5.
- the path of the piston is detected via markings on the cylinder rod or piston rod 18 and corresponding limit switches or sensors S 1 and S 2 over the complete path of the piston.
- the sensors S 1 and S 2 are located in the unpressurized area of the piston rod bearing.
- Such a relative measuring system is expediently provided with a reference zero which is passed over at least once each time the machine is started.
- the configuration of the position and speed detection device 16 or 17 shown in FIG. 6 is preferred in comparison thereto.
- the path of the piston rod 18 is only detected in the region of the two end positions, which is completely sufficient for hydraulic cylinders in which only the Motion damping according to the invention should take place.
- the limit switches S 1 and S 2 are in turn integrated into the hydraulic cylinder in the region of the piston rod bearing and detect markings on the piston rod 18 which are provided in their end regions. If the markings 21 or 22 reach the limit switches or end signal transmitters S 1 and S 2 , they emit a signal so that, in the manner described above, on the one hand the reaching of the pre-end position of the piston is indicated and on the other hand the speed of the piston is detected or can be determined.
- the control device 15 shown in Figure 1 actuates the directional control valves 4, 5 and 6 Reaching the pre-end positions depending on the speed recorded as follows:
- FIG. 2 shows, a movement of the hydraulic cylinders 10 and 11 is initiated by the control of the directional valves 4, 5 and 6 at point P1.
- the control current is first increased to a 10% value such as 10, so that the start of movement of the hydraulic cylinders can be assumed in point 2.
- the pressure build-up and the acceleration of the hydraulic cylinders 10 and 11 take place along the control ramp between points P2 and P3.
- the hydraulic cylinders reach their maximum speed at 90% control current I 90 , which is reached in point P3 of the diagram in FIG. From there, the maximum current Imax is reached in point P4, so that the hydraulic pistons run at full speed.
- the first end signal generator S 1 is first run over in the direction of movement.
- the hydraulic cylinder is still driven at full speed, the first end signal generator S 1 emitting its signal.
- a control piston of one of the directional control valves 4 or several control pistons of several directional control valves 4 and 5 is abruptly deactivated, so that the corresponding control current for these directional control valves suddenly drops from point P5 to point P6, ie to zero.
- the control pistons follow the current according to their dynamic properties.
- the remaining control pistons continue to be driven with the full control current Imax until the second end signal generator S 2 is also run over and emits its corresponding signal.
- the time t K is determined which was required to drive over both end signal generators S 1 and S 2 .
- a comparison and difference formation device 23 in the control device 15 compares the detected value t K of the time period, which is a measure of the speed of the hydraulic cylinder, with a predetermined value t S. If the detected time t K is less than or equal to the value t S , the damping process takes place along the line between the points P7, P8, P9, P10, P11, P12. This means that the recorded piston speed was greater than or equal to a limit speed. The damping process is initiated immediately.
- the damping takes place with a time delay, specifically along the line between the points P7 ', P8', P9 ', P10', P11 'and P12'.
- the time offset t F is selected by the control device 15 proportional to the time exceeding t S , ie proportional to the amount by which the detected time t K is greater than the predetermined time t S.
- the control current for the remaining directional control valves 6 to n ie for the directional control valves that were not immediately retracted when the first end signal generator S 1 was overrun, is reduced to the grade rule I S.
- the control pistons of the directional control valves are suddenly brought into a position from which a braking effect occurs on the outlet side of the hydraulic cylinders 10 and 11.
- Braking then takes place along the damping ramp from point P8 to Point P9 or from point P8 'to point P9'.
- a piston continues to run along the damping ramp up to the Points P11 or P11 ', where it is then switched off, i.e. the current will reduced to zero, as indicated by points P12 or P12 '.
- the remaining control piston of the one way valve is driven along a control ramp from point P9 to point P10 or P9 'and P10', where it then reaches the outlet current I A at point P10. With the outlet flow it is possible to reach the end position with full cylinder force.
- the cut-off is initiated at point P13 by releasing the hand control.
- the current runs along the jump ramp from point P13 to point P14 and is then turned off along the line from point P14 to point P15.
- n pumps can be used.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Fluid Mechanics (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Fluid-Pressure Circuits (AREA)
- Operation Control Of Excavators (AREA)
- Actuator (AREA)
- Forklifts And Lifting Vehicles (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10256923A DE10256923B4 (de) | 2002-12-05 | 2002-12-05 | Verfahren und Vorrichtung zur Bewegungsdämpfung von Hydraulikzylindern mobiler Arbeitsmaschinen |
| DE10256923 | 2002-12-05 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1426499A1 true EP1426499A1 (fr) | 2004-06-09 |
| EP1426499B1 EP1426499B1 (fr) | 2006-12-27 |
Family
ID=32309007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP03021744A Expired - Lifetime EP1426499B1 (fr) | 2002-12-05 | 2003-09-25 | Procédé et appareil d'amortissement des fins de course d'un cylindre hydraulique utilisé dans des engins de travaux publics |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7318292B2 (fr) |
| EP (1) | EP1426499B1 (fr) |
| JP (1) | JP4503272B2 (fr) |
| KR (1) | KR101073202B1 (fr) |
| CN (1) | CN100353078C (fr) |
| AT (1) | ATE349578T1 (fr) |
| DE (2) | DE10256923B4 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014086327A1 (fr) * | 2012-12-04 | 2014-06-12 | Komatsu Mining Germany Gmbh | Vérin hydraulique pourvu d'un amortissement de position finale |
| CN104006037A (zh) * | 2014-06-06 | 2014-08-27 | 山东中川液压有限公司 | 一种三泵式液压挖掘机供油装置 |
| CN107178116A (zh) * | 2017-06-19 | 2017-09-19 | 徐州徐工挖掘机械有限公司 | 一种挖掘机行走自动调速系统及挖掘机 |
| US11965314B2 (en) | 2020-10-30 | 2024-04-23 | Cnh Industrial America Llc | Control methods for actuating the movement of a boom or an attachment in a work vehicle, corresponding control systems and work vehicles comprising such control systems |
Families Citing this family (57)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4114684B2 (ja) * | 2005-08-11 | 2008-07-09 | コベルコ建機株式会社 | 油圧シリンダの制御装置及びこれを備えた作業機械 |
| US20080058697A1 (en) | 2006-04-14 | 2008-03-06 | Deka Products Limited Partnership | Heat exchange systems, devices and methods |
| US10537671B2 (en) | 2006-04-14 | 2020-01-21 | Deka Products Limited Partnership | Automated control mechanisms in a hemodialysis apparatus |
| WO2008039495A1 (fr) * | 2006-09-27 | 2008-04-03 | Amberwave Systems Corporation | Transistors à effet de champ à trois grilles formés par piégeage selon le rapport hauteur/largeur |
| US9028691B2 (en) | 2007-02-27 | 2015-05-12 | Deka Products Limited Partnership | Blood circuit assembly for a hemodialysis system |
| US8317492B2 (en) | 2007-02-27 | 2012-11-27 | Deka Products Limited Partnership | Pumping cassette |
| US8562834B2 (en) | 2007-02-27 | 2013-10-22 | Deka Products Limited Partnership | Modular assembly for a portable hemodialysis system |
| CA2681912C (fr) * | 2007-02-27 | 2015-09-29 | Deka Products Limited Partnership | Systemes et procedes d'hemodialyse |
| US8393690B2 (en) | 2007-02-27 | 2013-03-12 | Deka Products Limited Partnership | Enclosure for a portable hemodialysis system |
| US8357298B2 (en) * | 2007-02-27 | 2013-01-22 | Deka Products Limited Partnership | Hemodialysis systems and methods |
| US8425471B2 (en) * | 2007-02-27 | 2013-04-23 | Deka Products Limited Partnership | Reagent supply for a hemodialysis system |
| US20090107335A1 (en) | 2007-02-27 | 2009-04-30 | Deka Products Limited Partnership | Air trap for a medical infusion device |
| US8491184B2 (en) | 2007-02-27 | 2013-07-23 | Deka Products Limited Partnership | Sensor apparatus systems, devices and methods |
| US8042563B2 (en) * | 2007-02-27 | 2011-10-25 | Deka Products Limited Partnership | Cassette system integrated apparatus |
| US8409441B2 (en) * | 2007-02-27 | 2013-04-02 | Deka Products Limited Partnership | Blood treatment systems and methods |
| US8771508B2 (en) * | 2008-08-27 | 2014-07-08 | Deka Products Limited Partnership | Dialyzer cartridge mounting arrangement for a hemodialysis system |
| US20100056975A1 (en) * | 2008-08-27 | 2010-03-04 | Deka Products Limited Partnership | Blood line connector for a medical infusion device |
| KR100974275B1 (ko) * | 2007-12-17 | 2010-08-06 | 볼보 컨스트럭션 이키프먼트 홀딩 스웨덴 에이비 | 소 선회식 굴삭기의 붐 충격 완화장치 및 그 제어방법 |
| US10201647B2 (en) | 2008-01-23 | 2019-02-12 | Deka Products Limited Partnership | Medical treatment system and methods using a plurality of fluid lines |
| US7975410B2 (en) * | 2008-05-30 | 2011-07-12 | Caterpillar Inc. | Adaptive excavation control system having adjustable swing stops |
| US9206589B2 (en) * | 2009-03-31 | 2015-12-08 | Caterpillar Inc. | System and method for controlling machines remotely |
| US20100245129A1 (en) * | 2009-03-31 | 2010-09-30 | Caterpillar Inc. | System and method for identifying machines |
| US10208529B2 (en) | 2009-06-23 | 2019-02-19 | Higher Power Hydraulic Doors, Llc | Tilt-up door |
| CN101666105B (zh) * | 2009-07-08 | 2011-08-10 | 北汽福田汽车股份有限公司 | 控制挖掘机动臂上升速度的方法、控制系统及一种挖掘机 |
| MX2012005088A (es) | 2009-10-30 | 2012-10-03 | Deka Products Lp | Aparato y metodo para detectar la desconexion de un dispositivo de acceso intravascular. |
| JP5048169B2 (ja) * | 2010-03-15 | 2012-10-17 | 株式会社小松製作所 | 建設車両の作業機の制御装置及び制御方法 |
| DE102010032359A1 (de) * | 2010-07-27 | 2012-02-02 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur geschwindigkeitsabhängigen Endlagendämpfung eines Kolbens |
| KR20120072729A (ko) * | 2010-12-24 | 2012-07-04 | 두산인프라코어 주식회사 | 상이한 컷오프 압력을 구비한 유압 펌프를 포함하는 휠로더 |
| SG10201604167XA (en) | 2011-05-24 | 2016-07-28 | Deka Products Lp | Blood treatment systems and methods |
| CA3166031A1 (fr) | 2011-05-24 | 2012-11-29 | Deka Products Limited Partnership | Systeme d'hemodialyse |
| FR2975774B1 (fr) * | 2011-05-25 | 2014-01-17 | Eurocopter France | Procede de determination de l'effort statique developpe par une servocommande |
| US8899143B2 (en) * | 2011-06-28 | 2014-12-02 | Caterpillar Inc. | Hydraulic control system having variable pressure relief |
| JP5752526B2 (ja) * | 2011-08-24 | 2015-07-22 | 株式会社小松製作所 | 油圧駆動システム |
| CN102985306B (zh) | 2012-03-15 | 2014-05-28 | 株式会社小松制作所 | 作业车辆和作业车辆的控制方法 |
| CN102616217B (zh) * | 2012-04-16 | 2013-12-11 | 中联重科股份有限公司 | 一种工程机械支腿展收的控制方法、装置及系统 |
| CN103423235B (zh) * | 2012-05-23 | 2015-11-25 | 中联重科股份有限公司 | 液压缸缓冲控制方法、缓冲式液压缸控制系统及液压设备 |
| CN102678663B (zh) * | 2012-05-30 | 2015-05-20 | 上海三一重机有限公司 | 一种挖掘机用油缸及带有该油缸的挖掘机 |
| CN102979782B (zh) * | 2012-11-07 | 2015-05-20 | 中国航空工业集团公司沈阳发动机设计研究所 | 一种作动筒同步极限限位装置 |
| KR101471288B1 (ko) * | 2013-05-06 | 2014-12-09 | 현대중공업 주식회사 | 선회밀림방지장치를 구비한 굴삭기 선회장치 |
| CN103644174B (zh) * | 2013-12-16 | 2016-04-20 | 中联重科股份有限公司 | 串联油缸的行程控制方法、装置和系统 |
| US12026271B2 (en) | 2014-05-27 | 2024-07-02 | Deka Products Limited Partnership | Control systems and methods for blood or fluid handling medical devices |
| US9617710B2 (en) | 2014-06-18 | 2017-04-11 | Komatsu Ltd. | Work vehicle and method for controlling work vehicle |
| DE112014000147B4 (de) * | 2014-09-10 | 2021-07-29 | Komatsu Ltd. | Baufahrzeug |
| CN104999695B (zh) * | 2015-06-15 | 2016-09-28 | 浙江大学 | 一种实现液压机超低速稳定运行的电液控制系统 |
| KR200485329Y1 (ko) | 2015-09-25 | 2017-12-26 | 라온상사 주식회사 | 기능성 젓가락 |
| JP6559529B2 (ja) * | 2015-10-06 | 2019-08-14 | 日立建機株式会社 | 建設機械 |
| JP6650471B2 (ja) * | 2016-01-29 | 2020-02-19 | 株式会社小松製作所 | 油圧シリンダ用スプール弁装置 |
| GB2553504A (en) * | 2016-08-26 | 2018-03-14 | Caterpillar Inc | A machine comprising a body and an implement movable relative to the body |
| JP6697361B2 (ja) * | 2016-09-21 | 2020-05-20 | 川崎重工業株式会社 | 油圧ショベル駆動システム |
| EP3450634B1 (fr) | 2017-08-30 | 2021-03-03 | Topcon Positioning Systems, Inc. | Procédé et appareil d'atténuation de commande d'opérateur de machine |
| CN109210036B (zh) * | 2018-10-16 | 2020-07-07 | 武汉深能环保新沟垃圾发电有限公司 | 一种液压系统协调控制方法、系统、设备及存储介质 |
| JP7305968B2 (ja) * | 2019-01-28 | 2023-07-11 | コベルコ建機株式会社 | 作業機械における油圧シリンダの駆動装置 |
| US11828040B2 (en) * | 2019-09-27 | 2023-11-28 | Topcon Positioning Systems, Inc. | Method and apparatus for mitigating machine operator command delay |
| US11408449B2 (en) | 2019-09-27 | 2022-08-09 | Topcon Positioning Systems, Inc. | Dithering hydraulic valves to mitigate static friction |
| CN110984261B (zh) * | 2019-11-21 | 2021-05-11 | 中联重科股份有限公司 | 挖掘机的油缸流量分配控制方法、装置及挖掘机 |
| KR102309152B1 (ko) * | 2021-04-30 | 2021-10-06 | 주식회사 이그린테크 | 김치 양념 투입장치 |
| DE102023000817A1 (de) * | 2023-03-03 | 2024-09-05 | Hydac Systems & Services Gmbh | Verfahren zum Ansteuern eines fluidischen Aktors nebst Vorrichtung zum Durchführen des Verfahrens |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1382057A (en) * | 1971-12-17 | 1975-01-29 | Rank Organisation Ltd | Servomechanisms |
| US4358989A (en) * | 1979-06-20 | 1982-11-16 | Akermans Verstad Ab | Device for reducing piston velocity in a cylinder |
| US4896582A (en) * | 1985-01-07 | 1990-01-30 | Akermans Verkstad Ab | Method for reducing the piston speed, especially in the piston and cylinder assemblies of an excavating machine, and device for carrying out the method |
| EP0879969A2 (fr) * | 1997-05-23 | 1998-11-25 | Bernhard Moosmann | Procédé pour commander un actionneur à fluide |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5932389B2 (ja) * | 1977-05-20 | 1984-08-08 | 株式会社日立製作所 | 油圧エレベ−タの制御装置 |
| JPS6374881A (ja) * | 1987-07-31 | 1988-04-05 | 株式会社日立製作所 | 油圧エレベ−タ |
| JPS6374880A (ja) * | 1987-07-31 | 1988-04-05 | 株式会社日立製作所 | 油圧エレベ−タ |
| JPH04181003A (ja) * | 1990-11-15 | 1992-06-29 | Komatsu Ltd | 油圧シリンダの駆動制御装置 |
| US5261234A (en) * | 1992-01-07 | 1993-11-16 | Caterpillar Inc. | Hydraulic control apparatus |
| DE4201464C2 (de) * | 1992-01-21 | 1995-08-24 | Festo Kg | Vorrichtung zur Dämpfung eines in einem Zylinder verschiebbaren Kolbens in wenigstens einem seiner Endlagenbereiche |
| JP2884545B2 (ja) * | 1992-11-25 | 1999-04-19 | キヤノン株式会社 | シリンダ装置の制御方法 |
| JPH06330907A (ja) * | 1993-05-26 | 1994-11-29 | Kayaba Ind Co Ltd | 液圧アクチュエータの同期制御回路 |
| US5537818A (en) * | 1994-10-31 | 1996-07-23 | Caterpillar Inc. | Method for controlling an implement of a work machine |
| JP3068772B2 (ja) * | 1995-08-31 | 2000-07-24 | 日立建機株式会社 | 掘削装置の制御装置 |
| JP3856922B2 (ja) * | 1997-09-25 | 2006-12-13 | Smc株式会社 | 速度制御機構付シリンダ |
| DE19801338C1 (de) * | 1998-01-16 | 1999-06-02 | Festo Ag & Co | Vorrichtung zur gedämpften Positionierung eines in einem Zylinder verschiebbaren Kolbens an wenigstens einem Festanschlag, insbesondere zur Endlagenpositionierung |
| DE19915260C5 (de) * | 1999-04-03 | 2009-06-04 | Robert Bosch Gmbh | Linearantrieb |
| DE10122297C1 (de) * | 2001-05-08 | 2002-06-27 | Festo Ag & Co | Vorrichtung zur gedämpften Positionierung eines in einem Zylinder verschiebbaren Kolbens in einer Anschlagposition |
| JP2003056514A (ja) | 2001-08-13 | 2003-02-26 | Sumitomo (Shi) Construction Machinery Manufacturing Co Ltd | 建設機械の油圧シリンダ制御装置 |
| JP4114684B2 (ja) * | 2005-08-11 | 2008-07-09 | コベルコ建機株式会社 | 油圧シリンダの制御装置及びこれを備えた作業機械 |
-
2002
- 2002-12-05 DE DE10256923A patent/DE10256923B4/de not_active Expired - Fee Related
-
2003
- 2003-09-25 AT AT03021744T patent/ATE349578T1/de not_active IP Right Cessation
- 2003-09-25 EP EP03021744A patent/EP1426499B1/fr not_active Expired - Lifetime
- 2003-09-25 DE DE50306094T patent/DE50306094D1/de not_active Expired - Lifetime
- 2003-12-04 KR KR1020030087519A patent/KR101073202B1/ko active IP Right Grant
- 2003-12-05 US US10/729,789 patent/US7318292B2/en not_active Expired - Fee Related
- 2003-12-05 JP JP2003407169A patent/JP4503272B2/ja not_active Expired - Fee Related
- 2003-12-05 CN CNB200310120118XA patent/CN100353078C/zh not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1382057A (en) * | 1971-12-17 | 1975-01-29 | Rank Organisation Ltd | Servomechanisms |
| US4358989A (en) * | 1979-06-20 | 1982-11-16 | Akermans Verstad Ab | Device for reducing piston velocity in a cylinder |
| US4896582A (en) * | 1985-01-07 | 1990-01-30 | Akermans Verkstad Ab | Method for reducing the piston speed, especially in the piston and cylinder assemblies of an excavating machine, and device for carrying out the method |
| EP0879969A2 (fr) * | 1997-05-23 | 1998-11-25 | Bernhard Moosmann | Procédé pour commander un actionneur à fluide |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014086327A1 (fr) * | 2012-12-04 | 2014-06-12 | Komatsu Mining Germany Gmbh | Vérin hydraulique pourvu d'un amortissement de position finale |
| AU2013354562B2 (en) * | 2012-12-04 | 2018-03-22 | Komatsu Mining Germany Gmbh | Hydraulic cylinder with end position damping |
| US10502242B2 (en) | 2012-12-04 | 2019-12-10 | Komatsu Mining Germany Gmbh | Hydraulic cylinder with end position damping |
| CN104006037A (zh) * | 2014-06-06 | 2014-08-27 | 山东中川液压有限公司 | 一种三泵式液压挖掘机供油装置 |
| CN107178116A (zh) * | 2017-06-19 | 2017-09-19 | 徐州徐工挖掘机械有限公司 | 一种挖掘机行走自动调速系统及挖掘机 |
| CN107178116B (zh) * | 2017-06-19 | 2020-06-09 | 徐州徐工挖掘机械有限公司 | 一种挖掘机行走自动调速系统及挖掘机 |
| US11965314B2 (en) | 2020-10-30 | 2024-04-23 | Cnh Industrial America Llc | Control methods for actuating the movement of a boom or an attachment in a work vehicle, corresponding control systems and work vehicles comprising such control systems |
Also Published As
| Publication number | Publication date |
|---|---|
| US20040128868A1 (en) | 2004-07-08 |
| DE50306094D1 (de) | 2007-02-08 |
| EP1426499B1 (fr) | 2006-12-27 |
| JP2004183899A (ja) | 2004-07-02 |
| DE10256923B4 (de) | 2013-10-24 |
| JP4503272B2 (ja) | 2010-07-14 |
| KR101073202B1 (ko) | 2011-10-12 |
| DE10256923A1 (de) | 2004-06-17 |
| CN1566717A (zh) | 2005-01-19 |
| US7318292B2 (en) | 2008-01-15 |
| KR20040049277A (ko) | 2004-06-11 |
| ATE349578T1 (de) | 2007-01-15 |
| CN100353078C (zh) | 2007-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE10256923B4 (de) | Verfahren und Vorrichtung zur Bewegungsdämpfung von Hydraulikzylindern mobiler Arbeitsmaschinen | |
| DE102005014416B4 (de) | Luftservozylindervorrichtung und Steuerverfahren hierfür | |
| EP1067319B2 (fr) | Dispositif de commande pour actionneur de transmission | |
| EP2032878B1 (fr) | Dispositif pour commander un cylindre de réglage à double effet, actionné par un fluide | |
| DE19934782C2 (de) | Verfahren und Anordnung zum Steuern eines hydraulischen Fahrzeugantriebs | |
| DE2419311A1 (de) | Mit hoher geschwindigkeit arbeitendes ventil | |
| DE3018156A1 (de) | Hydraulische hebevorrichtung | |
| DE2609434C2 (de) | Einrichtung zur Steuerung eines hydraulischen Motors | |
| CH662532A5 (de) | Hydraulikeinrichtung fuer die formschliesseinheit einer kunststoff-spritzgiessmaschine. | |
| EP0144788B1 (fr) | Dispositif de régulation de puissance d'une transmission hydraulique à débit variable | |
| DE4228599B4 (de) | Hydraulikkreis für die Versorgung mehrerer, seriell betriebener Verbraucher einer hydraulisch gesteuerten Anlage | |
| CH642905A5 (de) | Spritzgiessmaschine. | |
| DE4201464C2 (de) | Vorrichtung zur Dämpfung eines in einem Zylinder verschiebbaren Kolbens in wenigstens einem seiner Endlagenbereiche | |
| DE10248797A1 (de) | Hochgeschwindigkeitsantriebsverfahren und -vorrichtung | |
| EP3336051B1 (fr) | Dispositif de levage pour un chariot de manutention ainsi qu'un tel chariot de manutention | |
| DE69417153T2 (de) | Steuerungsvorrichtung eines Stellgliedes einer Baumaschine | |
| CH628117A5 (en) | Brake-valve device | |
| DE102006046854A1 (de) | Hydrostatische Verstelleinheit mit einem Servosystem und einer das Servosystem steuernden Ventileinheit | |
| EP3371466A1 (fr) | Procédé et dispositif de commande d'une unité d'entraînement à actionnement hydraulique d'un élément de robinetterie | |
| DE3007011C2 (de) | Hydraulischer Antrieb für insbesondere Baumaschinen und Steuerverfahren | |
| DE3215066C1 (de) | Sicherheitsabschaltvorrichtung fuer eine Zahnradschleifmaschine | |
| EP1430201B1 (fr) | Procede de commande d'un systeme de controle de soupape electrohydraulique de moteur a combustion interne, programme d'ordinateur et ensamble de controle et de regulation pour commander un moteur a combustion interne | |
| DE3801374A1 (de) | Steuervorrichtung fuer einen hydraulischen aufzug | |
| DE102018219365A1 (de) | Hydromaschine, Steuerungsanordnung, Hydraulisches System und Verfahren | |
| EP2600011A2 (fr) | Distributeur hydraulique pour le dispositif de levage d'un véhicule agricole |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK |
|
| 17P | Request for examination filed |
Effective date: 20040825 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061227 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061227 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061227 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061227 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061227 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061227 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REF | Corresponds to: |
Ref document number: 50306094 Country of ref document: DE Date of ref document: 20070208 Kind code of ref document: P |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070327 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070327 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070407 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20070329 |
|
| ET | Fr: translation filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070528 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20070928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070930 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070328 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070930 |
|
| PGRI | Patent reinstated in contracting state [announced from national office to epo] |
Ref country code: CH Effective date: 20080612 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: AEN Free format text: DAS PATENT IST AUFGRUND DES WEITERBEHANDLUNGSANTRAGS VOM 09.06.2008 REAKTIVIERT WORDEN. Ref country code: CH Ref legal event code: NV Representative=s name: BOVARD AG PATENTANWAELTE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070925 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070628 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061227 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PFA Owner name: LIEBHERR-FRANCE SAS Free format text: LIEBHERR-FRANCE SAS#2, AVENUE JOSEPH REY#68005 COLMAR CEDEX (FR) -TRANSFER TO- LIEBHERR-FRANCE SAS#2, AVENUE JOSEPH REY#68005 COLMAR CEDEX (FR) |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 15 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20180924 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20180924 Year of fee payment: 16 Ref country code: GB Payment date: 20180924 Year of fee payment: 16 Ref country code: FI Payment date: 20180926 Year of fee payment: 16 Ref country code: BE Payment date: 20180919 Year of fee payment: 16 Ref country code: CH Payment date: 20180924 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20181001 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20180928 Year of fee payment: 16 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 50306094 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: FI Ref legal event code: MAE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190925 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20191001 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191001 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200401 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190925 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20190925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190925 |