-
Die Erfindung betrifft generell eine Rahmenstruktur für ein Elektromotorrad und insbesondere eine Rahmenstruktur für ein Elektromotorrad, bei dem Hauptkomponenten mittels Hochspannungskabeln miteinander verbunden sind.
-
Herkömmlicherweise ist ein Chassis eines Elektromotorrads bekannt, das eine elektrische Komponente, wie eine Batterie oder dergleichen, die einen relativ breiten Einbauraum erfordert (siehe die
JP 2006-219081 A ), aufnimmt. Das in der
JP 2006-219081 A offenbarte Chassis ist mit einem Einbauraum versehen, der durch linke und rechte Halbrahmenteile definiert ist und an der seitlichen Seite desselben eine Öffnung aufweist, durch die der Einbauraum zur Außenseite offen bzw. zugänglich ist. Elektrische Komponenten werden in den Einbauraum durch die Öffnung in einem Zustand der Aufbewahrung in einem expandierbaren Aufnahmegehäuse eingebaut. Wenn die elektrische Komponente durch die Öffnung an dem Halbrahmenteil in den Einbauraum in einem Zustand der Aufbewahrung in dem Aufnahmegehäuse, das größer als die Öffnung ist, eingebaut wird, ist es möglich, das Aufnahmegehäuse in den Einbauraum des Chassis dadurch einzufügen, dass das Aufnahmegehäuse kontrahiert wird.
-
Hauptkomponenten, wie ein Elektromotor, ein Wechselrichter, ein Kontroller und dergleichen, sind in das Chassis eines Elektromotorrads eingebaut. Da durch derartige Komponenten ein hoher Strom fließt, sind Komponenten mittels dicker Hochspannungskabel miteinander verbunden, die jedoch nicht einfach anzubringen sind. Ferner sind, da das Elektromotorrad mit einer Mehrzahl von Sensoren und Schaltern versehen ist und ein Hauptkabelstrang eine komplizierte Struktur aufweist, die elektrischen Verkabelungen kompliziert. Darüber hinaus ist es erforderlich, dass derzeit erhältliche Elektromotorräder leichter und kleiner gemacht werden, sodass erwartet wird, dass in der Zukunft der Einbauraum in dem Chassis verringert ist. Daher ist es bei der im Vorhergehenden angegebenen Chassisstruktur, bei der elektrische Komponenten in einem Zustand, in dem linke und rechte Halbrahmenteile zur Bildung der Chassisstruktur miteinander verbunden sind, anzubringen sind, schwierig, die Verkabelungen anzubringen.
-
Herkömmlicherweise umfasst ein Elektromotorrad des Scootertyps einen Elektromotor an der Seite eines Hinterrads, das an einer mit einem Chassisrahmen verbundenen Hinterradschwinge angebracht ist (siehe die
JP 2013-154859 A ). Bei dem in der
JP 2013-154859 A offenbarten Elektromotorrad ist eine Schwenkplatte an einem Chassisrahmen vorgesehen und eine Hinterradschwinge derart verbunden, dass sie um eine Drehachse der Schwenkplatte vertikal bewegbar ist. Ferner ist ein Seitenständer an der Schwenkplatte unter der Drehachse angebracht. Wenn der Seitenständer nach unten klappt und mit dem Boden Kontakt herstellt, bleibt das Elektromotorrad von selbst aufrecht. Ähnlich diesen ist für das Elektromotorrad des Scootertyps die Anbringungsposition des Seitenständers von dem Elektromotor getrennt.
-
Für Elektromotorräder eines anderen Typs ist der Elektromotor jedoch an einer Position nahe einem Drehpunkt des Chassisrahmens getragen. Um zu ermöglichen, dass der Elektromotor vom dem Chassisrahmen getragen wird, ist es erforderlich, eine Abtriebswelle des Elektromotors an drei oder mehr Punkten um die Abtriebswelle so zu tragen, dass einer Reaktion gegen eine auf die Abtriebswelle ausgeübte Antriebskraft entgegengewirkt wird. Deshalb tritt ein Problem insofern auf, als der Elektromotor nicht stabil getragen sein kann, wenn nicht ein Abschnitt zum Tragen des Elektromotors über einen breiten seitlichen Seitenbereich des Chassisrahmens verwendet wird.
-
Ferner ist eine Halterung für einen Seitenständer an dem Chassisrahmen nahe der Tragposition des Elektromotors angebracht. Diese Halterung ist aus einem geschmiedeten Material, das härter als der Chassisrahmen ist, gebildet, da er einer lokalen Belastung an einer Position nahe einer Drehwelle des Seitenständers ausgesetzt ist. Daher weist, da der Chassisrahmen die Anbringungsposition der Halterung für einen Seitenständer umfassen sollte, der Chassisrahmen eine begrenzte Fläche zum Tragen des Elektromotors auf.
-
Aus der
US 2013/0032424 A1 ist eine Rahmenstruktur für ein Elektromotorrad bekannt, bei der ein Chassisrahmen aus einem Paar von Guss-Halbrahmenkörpern gebildet ist.
-
Aus der
US 2013/0081894 A1 ist ein Elektromotorrad bekannt, dessen Hauptrahmen eine Rohrstruktur aufweist.
-
Aus der
US 2013/0256049 A1 ist ein Elektromotorrad bekannt, bei dem eine Batterie, ein Elektromotor und Elektronikkomponenten, die einen Wechselrichter umfassen, jeweils in einem eigenen Gehäuse eingebaut sind und die Gehäuse an einem Chassis des Motorrads angebracht sind.
-
Aus der
WO 2013/098890 A1 ist ein Elektromotorrad bekannt, bei dem eine Batterie in einer Gehäuseeinheit eingebaut ist und die Gehäuseeinheit an einem Rohrrahmen des Motorrads angebracht ist.
-
Eine Aufgabe der vorliegenden Erfindung ist daher die Bereitstellung einer Rahmenstruktur für ein Elektromotorrad, die den Einbau von elektrischen Komponenten und der Verkabelung zwischen diesen verbessern kann.
-
Um das Problem zu lösen, sieht die vorliegende Erfindung eine Rahmenstruktur für ein Elektromotorrad mit den Merkmalen des Patentanspruches 1 vor, bei der eine Mehrzahl von elektrischen Komponenten in einem Chassisrahmen, der aus einem Paar von Halbrahmenkörpern gebildet ist, eingebaut sind, wobei einer der Halbrahmenkörper zu einem Modul geformt ist, mit dem elektrische Komponenten über Kabel verbunden sind, bevor das Paar von Halbrahmenkörpern (25L, 25R; 131L, 131R) gekoppelt wird.
-
Gemäß dieser Konfiguration kann, da einer der Halbrahmenkörper und die Mehrzahl von elektrischen Komponenten zu einem Modul geformt sind, wenn die Halbrahmenkörper in einem Paar zusammengekoppelt sind, die Mehrzahl von elektrischen Komponenten in den Chassisrahmen ohne Weiteres eingebaut werden. Da die elektrischen Komponenten und die Verdrahtung an einem der Halbrahmenkörper eingebaut werden, bevor das Paar von Halbrahmenkörpern gekoppelt wird, kann die Verkabelung zwischen den elektrischen Komponenten ohne Weiteres durchgeführt werden. Ferner kann der Einbau der elektrischen Komponenten und die Verkabelung in einem verengten Einbauraum in dem Chassisrahmen durchgeführt werden, was zur Fertigung eines leichten kleinen Elektromotorrads beiträgt.
-
Bei der Rahmenstruktur für ein Elektromotorrad gemäß der vorliegenden Erfindung kann die Mehrzahl von elektrischen Komponenten einen Elektromotor, einen Wechselrichter und einen Kontroller umfassen. In dieser Konfiguration sind, da durch den Elektromotor, den Wechselrichter und den Kontroller ein hoher bzw. starker Strom fließt, die elektrischen Komponenten mittels dicker Hochspannungskabel, die nicht leicht zu installieren sind, miteinander verbunden. Jedoch kann, da der Einbau der Hochspannungskabel durchgeführt wird, wenn das Paar von Halbrahmenkörpern in einem offenen Zustand ist, die Verkabelung ohne Weiteres durchgeführt werden.
-
Bei der Rahmenstruktur für ein Elektromotorrad gemäß der vorliegenden Erfindung werden eine Sitzschiene, die aus einem Paar von Schienenelementen gebildet ist, und eine Schwinge, die aus einem Paar von Halbarmkörpern gebildet ist, in den Chassisrahmen eingebaut, wobei einer der Halbrahmenkörper zu einem Modul geformt ist, mit dem zusätzlich zu den elektrischen Komponenten eines der Schienenelemente, einer der Halbarmkörper und eine Hinterradaufhängung verbunden sind, und der andere Halbrahmenkörper zu einem Modul geformt ist, in das das andere Schienenelement und der andere Halbarmkörper eingebaut werden. Gemäß dieser Konfiguration können, wenn das Paar von modularen Halbrahmenkörpern gekoppelt wird, die Sitzschiene, die Schwinge und die Hinterradaufhängung zusätzlich zu den elektrischen Komponenten an dem Chassisrahmen ohne Weiteres angebracht werden.
-
Bei der Rahmenstruktur für ein Elektromotorrad gemäß der vorliegenden Erfindung ist das Paar von Halbrahmenkörpern gekoppelt, wobei ein Lenkkopfrohr zwischen diesen eingefügt ist. Gemäß dieser Konfiguration ist es nicht erforderlich, da das Paar von Halbrahmenkörpern und das Lenkkopfrohr diskrete Elemente sind, dass das Lenkkopfrohr getrennt an jeweiligen Halbrahmenköpern in einer einteiligen Karosserie ausgebildet ist. Daher besteht keine Notwendigkeit einer maschinellen Bearbeitung des Lenkkopfrohrs, nachdem das Paar von Halbrahmenkörpern gekoppelt ist, wie für den Fall, dass das Paar von Halbrahmenkörpern zur Bildung des Lenkkopfrohrs gekoppelt ist.
-
Bei der Rahmenstruktur für ein Elektromotorrad gemäß der vorliegenden Erfindung ist einer der Halbrahmenkörper in einem Paar zu einem Modul geformt, mit dem elektrische Komponenten verbunden sind, sodass der Einbau der elektrischen Komponenten und die Verkabelung der elektrischen Komponenten in dem Chassisrahmen ohne Weiteres durchgeführt werden können.
-
In den beigefügten Zeichnungen ist:
-
1 eine linke Seitenansicht eines Elektromotorrads gemäß einer ersten Ausführungsform der vorliegenden Erfindung;
-
2 eine Darstellung des Elektromotorrads von 1, wobei ein Sitz und eine Seitenabdeckung entfernt sind;
-
3 eine Darstellung des Elektromotorrads von schräg oben, wobei ein Chassisrahmen entfernt ist;
-
4 eine auseinandergezogene perspektivische Darstellung eines modularen Halbrahmenkörpers, wobei ein Chassisrahmen auseinandergebaut ist;
-
5 eine Seitenansicht, die den Mittelabschnitt eines linken Halbrahmenkörpers zeigt;
-
6 eine linke Seitenansicht eines Elektromotorrads gemäß einer zweiten Ausführungsform der vorliegenden Erfindung;
-
7A und 7B Darstellungen, die einen Chassisrahmen zeigen;
-
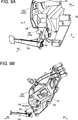
8A bis 8C Darstellungen, die die Anbringungsposition für einen Elektromotor zeigen;
-
9A und 9B Darstellungen, die die Anbringungsposition einer Halterung zeigen; und
-
10A und 10B Darstellungen, die die Anbringungsposition für einen Elektromotor zeigen.
-
Erste Ausführungsform
-
Die erste Ausführungsform der vorliegenden Erfindung wird nun unter Bezug auf die beigefügten Zeichnungen detailliert beschrieben.
-
Obwohl im Folgenden ein Beispiel für eine Rahmenstruktur für ein Elektromotorrad, die an einem Elektromotorrad des Geländefahrzeugtyps eingerichtet wird, beschrieben wird, ist das einzurichtende Objekt nicht hierauf beschränkt, sondern es kann verändert sein. Beispielsweise kann die Rahmenstruktur für Elektromotorräder eines anderen Typs eingerichtet sein. 1 ist eine linke Seitenansicht eines Elektromotorrads 1 gemäß der ersten Ausführungsform der vorliegenden Erfindung. 2 ist eine Darstellung des Elektromotorrads 1 von 1, bei der ein Sitz 8 und eine Seitenabdeckung 7 entfernt sind. 3 ist eine Ansicht des Elektromotorrads 1 von schräg oben, wobei ein Chassisrahmen 2 gemäß der ersten Ausführungsform der vorliegenden Erfindung entfernt ist. Indessen bezeichnen die Pfeile FR, RE, L und R durchgehend in den Zeichnungen jeweils eine Vorderseite, eine Rückseite, eine linke Seite bzw. eine rechte Seite eines Chassis.
-
Wie in 1 und 2 gezeigt ist, ist das Elektromotorrad 1 mit einem aus Stahl oder einer Aluminiumlegierung hergestellten Chassisrahmen 2 versehen, an dem diskrete Teile wie eine Antriebseinheit, elektrische Komponenten und dergleichen angebracht sind. Der Chassisrahmen 2 ist von einem Lenkkopfrohr 26, das an einem Vorderende desselben positioniert ist, in zwei Abschnitte geteilt und erstreckt sich zur Rückseite desselben schräg nach unten. Ein Elektromotor 3 und eine Batterie 4 sind innen an dem Chassisrahmen 2 angebracht. Die Batterie 4 kann beispielsweise eine Lithiumionen-Batterie sein und sie ist an dem Chassisrahmen angebracht, wobei ein Abschnitt der unteren Hälfte derselben in einem Batteriekasten 5 aufgenommen ist (siehe 3). Ein Kontroller 6 ist innen an dem Batteriekasten 5 so befestigt, dass er den Antrieb des Elektromotors 3 steuert.
-
Eine Seitenabdeckung 7 ist an dem Chassisrahmen 2 zum Abdecken des oberen Abschnitts des Chassisrahmens 2 zur Verbesserung eines Aussehens angebracht. Ein Sitz 8 ist über der Seitenabdeckung 7 angeordnet. Ein Abschnitt der Batterie 4, der von dem Chassisrahmen 2 nach außen zugänglich ist, wird durch die Seitenabdeckung 7 und den Sitz 8 abgedeckt. Der Sitz 8 ist von einem Paar von linken und rechten Sitzschienen 11 getragen, die sich von der Rückseite des Chassisrahmens 2 in der rückwärtigen Richtung schräg nach oben erstrecken. Ein Paar von linken und rechten Seitenrahmen 12 ist an der Rückseite des Chassisrahmens 2 angebracht, um die linken und rechten Sitzschienen 11 an unteren Abschnitten derselben zu tragen. Ein Wechselrichter 13 ist an den Sitzschienen 11 angebracht.
-
An der Vorderseite des Chassisrahmens 2 ist ein Paar von linken und rechten Vordergabeln 14 an dem Lenkkopfrohr 26 in einer mittels einer (nicht gezeigten) Lenkwelle steuerbaren Weise angebracht. Die Vordergabeln 14 sind mit vorderen Aufhängungen zur Stoßabsorption eines Vorderrads versehen, wodurch Stöße von dem Vorderrad 16 nicht auf den Chassisrahmen 12 übertragen werden. Ein Griff 15 ist an der oberen Seite der Vordergabeln 14 angebracht. Das Vorderrad 16 ist von den Vordergabeln 14 an deren unteren Abschnitten drehbar getragen. Ein vorderes Schutzblech 17 ist über dem Vorderrad 16 zur Abdeckung desselben vorgesehen.
-
An der Rückseite des Chassisrahmens 2 ist eine Schwinge 19 vertikal bewegbar mit einem Drehzentrum 18 verbunden. Eine hintere Aufhängung 21 zur Stoßabsorption eines Hinterrads ist zwischen dem Chassisrahmen 2 und der Schwinge 19 angebracht, um Stöße zwischen dem Chassisrahmen 2 und dem Hinterrad 22 zu absorbieren. Das Hinterrad 22 ist durch die Schwinge 19 an deren Rückseite drehbar getragen und ein hinteres Schutzblech 23 ist an der Rückseite der Sitzschiene 11 so vorgesehen, dass der obere Abschnitt des Hinterrads 22 abgedeckt ist. Energie von einer Abtriebswelle des Elektromotors 3 wird über eine Kette oder dergleichen auf das Hinterrad 22 übertragen.
-
Wie in 3 gezeigt ist, ist die hintere Aufhängung 21 auf der linken Seite in Bezug auf die Mittellinie C, die sich in der Längsrichtung des Chassis erstreckt, vorgesehen und die Batterie 4 auf der rechten Seite in Bezug auf die Mittellinie C vorgesehen. Ferner ist der Elektromotor 3 unter der hinteren Aufhängung 21 und der Batterie 4 entlang der Mittellinie C vorgesehen. Da die hintere Aufhängung 21 und die Batterie 4, die schwergewichtige Komponenten sind, verhältnisgleich in der Querrichtung angeordnet sind und der Elektromotor, der ebenfalls eine schwergewichtige Komponente ist, in der Mitte in der Querrichtung angeordnet ist, ist ein Gewicht des Motorradkörpers in der Querrichtung im Wesentlichen ausbalanciert, wodurch die Lenkstabilität verbessert ist.
-
Unter erneuter Rückkehr zu 2 ist in dem Elektromotorrad 1 der Elektromotor 3 von der Batterie 4 über den Wechselrichter 13 mit Energie versorgt und der Kontroller 6 steuert den Antrieb des Elektromotors 3. Da ein hoher bzw. starker Strom durch die Hauptkomponenten, wie den Wechselrichter 13, den Elektromotor 3, den Kontroller 6 und dergleichen fließt, sind die Hauptkomponenten mittels Hochspannungskabeln miteinander verbunden. Da Hochspannungskabel dick und nicht leicht zu biegen sind, ist es schwierig, die Hauptkomponenten von der Außenseite des Chassisrahmens 2 anzubringen und zu verkabeln. Ferner ist das Elektromotorrad 1 mit einer Vielzahl von Sensoren und Schaltern versehen, wobei die Verkabelung zwischen dem Kontroller 6 und den Sensoren oder Schaltern kompliziert ist.
-
Demgemäß konfiguriert die erste Ausführungsform den Chassisrahmen 2 so, dass er aus einem Paar von linken und rechten Halbrahmenkörpern 25L und 25R (4) gebildet ist. Ferner werden vor dem Zusammenbau die Halbrahmenkörper zu Modulen (Teilmontageeinheit) durch Anbringen oder Verkabeln von Komponenten daran bzw. damit gebildet und dann die modularen Halbrahmenkörper zusammengebaut. Dies führt zu einem einfachen Anbringen oder Verkabeln von Komponenten in dem Chassisrahmen 2. Die Anbringungs- und Verkabelungsvorgänge für den Chassisrahmen werden nun in Bezug auf 4 und 5 beschrieben.
-
4 ist eine auseinandergezogene perspektivische Darstellung des Chassisrahmens 2 gemäß der ersten Ausführungsform. 5 ist eine Seitenansicht des linken Halbrahmenkörpers 25L gemäß der ersten Ausführungsform. Obwohl 4 und 5 zeigen, dass eine Vielzahl von elektrischen Komponenten an dem linken Halbrahmenkörper 25L angebracht sind, ist die vorliegende Erfindung nicht hierauf beschränkt. Die elektrischen Komponenten können an dem rechten Halbrahmenkörper 25R angebracht sein. Ferner ist in 5 die Batterie 4 durch eine doppelpunktiert-gestrichelte Linie angegeben.
-
Wie in 4 gezeigt ist, ist der Chassisrahmen 2 aus einem Paar von linken und rechten Halbrahmenkörpern 25L und 25R gebildet, die zusammengebaut werden. Die Halbrahmenkörper 25L, 25R sind mit Kopfrahmenteilen 27L, 27R, die das Lenkkopfrohr 26, das ein einstückiger Körper ist, und Hauptrahmenteile 28L, 28R, die sich von den Kopfrahmenteilen 27L, 27R zum Mittelabschnitt des Elektromotorrads erstrecken, versehen. Die Kopfrahmenteile 27L, 28R sind mit halbzylindrischen Vertiefungen 34 versehen, die der Außenform des Lenkkopfrohrs 26 entsprechen. Die Halbrahmenkörper 25L, 25R und das Lenkkopfrohr 26 sind durch Schraubbolzen 31, die die Kopfrahmenteile 27L, 27R miteinander verbinden, während das Lenkkopfrohr 26 in die Vertiefungen 34 eingepasst ist, integral zusammengebaut.
-
Die Hauptrahmenteile 28L, 28R sind Hauptelemente, die den größeren Teil des Chassisrahmens 2 bilden. Wenn die Hauptrahmenteile 28L, 28R mittels einer Mehrzahl von Schraubbolzen 31 zusammengebaut sind, ist darin ein Montageraum ausgebildet, um eine Vielzahl von Komponenten aufzunehmen. Der Montageraum ist an der Vorderseite in der vertikalen Richtung geschlossen und an der Oberseite in der rückwärtigen Richtung geöffnet. Der Batteriekasten 5, der mit dem Kontroller 6 ausgestattet ist, ist an einem Abschnitt der im Wesentlichen vorderen Hälfte des linken Hauptrahmenteils 28L angebracht. Eine Batterie 4 (siehe 5) ist in dem Batteriekasten gelagert, wobei ein oberer Abschnitt derselben von dem Batteriekasten nach außen offenliegt. Der Elektromotor 3 ist an einem Abschnitt der im Wesentlichen hinteren Hälfte des linken Hauptrahmenteils 28L angebracht.
-
Eine Halterung 32 ist an dem linken Hauptrahmenteil 28L in einer vorstehenden Weise vorgesehen und die Sitzschiene 11L ist an der Halterung 32 angebracht. Die Sitzschiene 11L ist an deren unterem Abschnitt durch den an dem linken Hauptrahmenteil 28L angebrachten Seitenrahmen 12L verstärkt. Ferner ist die Schwinge 19 aus einem Paar von Halbarmkörpern 33L, 33R gebildet, wobei der linke Halbarmkörper 33L mit dem linken Hauptrahmenteil 28L in einer schwenkbaren Weise verbunden ist. Ferner sind das linke Hauptrahmenteil 28L und der linke Halbarmkörper 33L durch die hintere Aufhängung 21 miteinander verbunden.
-
Das linke Hauptrahmenteil 28L ist durch Anbringen des Kontrollers 6, des Batteriekastens 5, des Elektromotors 3, des Wechselrichters 13, der Sitzschiene 11L, des Seitenrahmens 12L, des Halbarmkörpers 33L und der hinteren Aufhängung 21 an diesem zu einem Modul geformt. Indessen ist das rechte Hauptrahmenteil 28R durch Anbringen der Sitzschiene 11R, des Seitenrahmens 12R und des Halbarmkörpers 33R an diesem, im Gegensatz zur Konfiguration des linken Hauptrahmenteils 28L, zu einem Modul geformt. Der Chassisrahmen 2 kann daher durch einfaches Zusammenbauen des Paars von linken und rechten modularen Halbrahmenkörpern gebildet werden.
-
Wie in 5 gezeigt ist, ist der an der Oberseite geöffnete Batteriekasten 5 an der Vorderhälftenseite des linken Hauptrahmenteils 28L derart angebracht, dass er nach hinten geneigt ist. Der Kontroller 6 ist an der linken Innenseite des Batteriekastens 5 angebracht und ein Lagerungsraum für eine Batterie 4 ist auf der rechten Seite des Kontrollers 6 gebildet. Ein Kabelbaum für verschiedene Sensoren oder Schalter, die zur Steuerung des Elektromotors 3 erforderlich sind, ist über einen Hauptkabelbaum mit dem Kontroller 6 verbunden. Die Batterie 4 ist in dem Batteriekasten 5 in der Nähe des Kontrollers 6 gelagert und sie versorgt den Kontroller 6 mit Energie.
-
Der Elektromotor 3 ist an der Hinterhälftenseite des linken Hauptrahmenteils 28L unter dem Batteriekasten 5 angebracht. Da der schwere Elektromotor an dem unteren Abschnitt des Motorradkörpers in einem im Wesentlichen mittleren Abschnitt zwischen dem Vorderrad 16 und dem Hinterrad 22 angebracht ist, ist der Schwerpunkt des Motorradkörpers abgesenkt, was zu verbesserter Manövrierbarkeit und Stabilität führt. Der Wechselrichter 13 ist an der Sitzschiene 11L angebracht, die sich von dem linken Hauptrahmenteil 28L nach hinten erstreckt. In gleicher Weise sind der Kontroller 6 (Batteriekasten 5), der Wechselrichter 13 und der Elektromotor 3 integral an dem linken Hauptrahmenteil 28L angebracht. Ferner sind der Kontroller 6 (Batteriekasten 5), der Wechselrichter 13 und der Elektromotor 3 mittels dicker Hochspannungskabel verbunden.
-
Der Halbarmkörper 33L ist an dem Drehzentrum 18 (siehe 4) des linken Hauptrahmenteils 28L angebracht. Die hintere Aufhängung 21 ist an deren Rückseite an einem im Wesentlichen mittleren Abschnitt des Halbarmkörpers 33L angebracht. Die Vorderseite der hinteren Aufhängung 21 ist an dem Hauptrahmenteil 28L nahe zur Rückseite des Batteriekastens 5 angebracht. Die hintere Aufhängung 21 ist in einem Raum angeordnet, der durch den Batteriekasten 5, den Elektromotor 3 und den Wechselrichter 13 festgelegt ist, was zu einer effizienten Raumnutzung in dem Hauptrahmen 28 führt.
-
In diesem Fall werden die an dem linken Halbrahmenkörper 25L durchgeführten Anbringungs- und Verkabelungsvorgänge durchgeführt, bevor der linke Halbrahmenkörper mit dem rechten Halbrahmenkörper 25R zusammengebaut wird, d. h. wenn das Paar von Halbrahmenkörper 25L, 25R in einem geöffneten Zustand ist. Daher ist, da der Anbringungs- oder Verkabelungsvorgang in einem Zustand durchgeführt werden kann, in dem der Montageraum des Halbrahmenkörpers 25L (Chassisrahmen 2) nach außen geöffnet ist, die Arbeitsposition oder der Zugang zur Arbeitsstelle nicht beschränkt. Daher ist es möglich, die Anbringung oder Verkabelung von verschiedenen Komponenten an dem Halbrahmenkörper 25L ohne Weiteres durchzuführen, während die Arbeitsbelastung verringert ist. Insbesondere können der Kontroller 6, der Elektromotor 3 und der Wechselrichter 13 mittels dicker, nicht leicht zu installierender Hochspannungskabel verbunden werden.
-
Ferner kann, da der Anbringungs- oder Verkabelungsvorgang durchgeführt werden kann, während die Arbeitsstelle beobachtet wird, die Arbeitsstabilität verbessert sein. Darüber hinaus ist es, da der Montageraum des Chassisrahmens 2 so stark verkleinert sein kann, wie der Anbringungs- oder Verkabelungsvorgang verbessert ist, möglich, ein leichtes kleines Elektromotorrad 1 zu produzieren. Ferner wird der Chassisrahmen 2 gebildet, wenn das Paar von modularen Halbrahmenkörpern 25L, 25R mittels der Mehrzahl von Schraubbolzen 31 zusammengebaut wird (siehe 4). Hierbei ist es, da die Halbrahmenkörper 25L, 25R zusammengebaut werden, während ein einstückiger Körper des Lenkkopfrohrs 26 dazwischen eingepasst wird (siehe 4), nach dem Zusammenbau des Paars von Halbrahmenkörpern 25L, 25R nicht erforderlich, das Lenkkopfrohr 26 maschinell zu bearbeiten.
-
Indessen wird im Falle eines herkömmlichen links/rechts-geteilten Chassisrahmens ein Lenkkopfrohr durch maschinelles Bearbeiten der Vorderseite des Chassisrahmens, während das Paar von Halbrahmenkörpern in einem zusammengebauten Zustand ist, gebildet. Aus diesem Grund ist es in einem Zustand, in dem die jeweiligen Halbrahmenkörper zu Modulen, an denen verschiedene Komponenten vor dem Zusammenbau von Halbrahmenkörpern angebracht werden, geformt sind, schwierig, das Lenkkopfrohr maschinell zu bearbeiten. Daher wird im Falle des herkömmlichen links/rechts-geteilten Chassisrahmens nach dem maschinellen Bearbeiten des Lenkkopfrohrs in einem Zustand, in dem das Paar von Halbrahmenkörpern zusammengebaut ist, der Anbringungs- oder Verkabelungsvorgang durchgeführt. In diesem Fall ist es jedoch schwierig, den Anbringungs- oder Verkabelungsvorgang durchzuführen, da der Anbringungs- oder Verkabelungsvorgang durch den offenen Raum des Chassisrahmens nach dem Zusammenbau der Halbrahmenkörper durchgeführt werden sollte.
-
Im Gegensatz dazu ist gemäß der ersten Ausführungsform mit dem Vorsehen eines einstückigen Körpers des Lenkkopfrohrs 26 das maschinelle Bearbeiten des Lenkkopfrohrs 26 nach dem Zusammenbau des Paars von Halbrahmenkörpern 25L, 25R unnötig. Daher kommt es, obwohl verschiedene Komponenten an den jeweiligen Halbrahmenkörpern 25L, 25R vor dem Zusammenbau des Paars von Halbrahmenkörpern 25L, 25R angebracht werden, wodurch Module gebildet werden, nicht mehr zu einer Beeinflussung anschließender Prozesse durch derartige Maßnahmen. Daher ist es möglich, den Anbringungs- oder Verkabelungsvorgang vor dem Zusammenbau der Halbrahmenkörper 25L, 25R durchzuführen, wodurch der mechanische Bearbeitungsprozess weiter erleichtert wird und daher die Herstellungskosten verringert werden.
-
So können gemäß der ersten Ausführungsform, da einer der Halbrahmenkörper 25L, 25R und die Mehrzahl von elektrischen Komponenten in ein Modul eingebaut werden, die Mehrzahl von elektrischen Komponenten ohne Weiteres in dem Chassisrahmen 2 durch Zusammenbauen des Paars von Halbrahmenkörpern 25L, 25R angebracht werden. Hierbei kann, da der Anbringungs- oder Verkabelungsvorgang an dem linken Halbrahmenkörper 25L vor dem Zusammenbau der Halbrahmenkörper 25L, 25R durchgeführt wird, die Arbeitseffizienz verbessert sein. Ferner kann, da der Anbringungs- oder Verkabelungsvorgang durchgeführt werden kann, während die Arbeitsstelle beobachtet wird, die Arbeitsstabilität verbessert sein. Ferner ist es, auch wenn der Montageraum in dem Chassisrahmen 2 verengt ist, möglich, den Anbringungs- oder Verkabelungsvorgang durchzuführen, wodurch zur Produktion eines leichten kleinen Elektromotorrads beigetragen wird.
-
Indessen kann die vorliegende Erfindung zu einer Vielzahl von Formen modifiziert werden, ohne auf die gezeigten Ausführungsformen beschränkt zu sein. Bei den gezeigten Ausführungsformen sind die Größen oder Formen der Komponenten nicht auf die in den Zeichnungen gezeigten Größen oder Formen beschränkt, sondern sie können in passender Weise innerhalb des Umfangs, den die Wirkung der Erfindung beeinflusst, geändert werden. Ferner ist es möglich, Ausführungsformen in passender Weise zu modifizieren und zu implementieren, ohne von dem Zielumfang der Erfindung abzuweichen.
-
Beispielsweise ist, obwohl der Elektromotor 3, der Wechselrichter 13, der Kontroller 6 und dergleichen gemäß der ersten Ausführungsform an dem linken Halbrahmenkörper 25L angebracht sind, die vorliegende Erfindung nicht hierauf beschränkt. Es ist möglich, die elektrischen Komponenten gemeinsam an einem 25 des Paars von Halbrahmenkörpern 25L, 25R anzubringen oder in anderer Weise die elektrischen Komponenten an dem rechten Halbrahmenkörper 25R anzubringen.
-
Ferner ist, obwohl die Sitzschiene 11L, der Seitenrahmen 12L, der Halbarmkörper 33L und die hintere Aufhängung 21 sowie die elektrischen Komponenten an dem Halbrahmenkörper 25L gemäß der ersten Ausführungsform so angebracht sind, dass sie ein Modul bilden, die vorliegende Erfindung nicht hierauf beschränkt. Es ist möglich, ein Modul durch Anbringen von nur elektrischen Komponenten an dem Halbrahmenkörper 25L auszubilden.
-
Ferner ist, obwohl das Lenkkopfrohr 26 und das Paar von Halbrahmenkörpern 25L, 25R gemäß der ersten Ausführungsform jeweils als ein diskreter Körper ausgebildet sind, die vorliegende Erfindung nicht hierauf beschränkt. Die Konfiguration kann derart sein, dass die maschinelle Bearbeitung des Lenkkopfrohrs 26 nach dem Zusammenbau des Paars von Halbrahmenkörpern 25L, 25R nicht erforderlich ist. Beispielsweise kann das Lenkkopfrohr 26 an einem von den Halbrahmenkörpern 25L, 25R in einem Paar integral ausgebildet sein.
-
Wie im Vorhergehenden angegeben ist, stellt die vorliegende Erfindung die Wirkung einer Erleichterung des Anbringungs- oder Verkabelungsvorgangs von jeweiligen Komponenten in dem Chassisrahmen bereit. Insbesondere ist die vorliegende Erfindung für eine Rahmenstruktur für ein Elektromotorrad verwendbar, bei der Hauptkomponenten mittels Hochspannungskabeln miteinander verbunden sind.
-
Zweite Ausführungsform
-
Die zweite Ausführungsform der vorliegenden Erfindung wird nun in Bezug auf die beigefügten Zeichnungen detailliert beschrieben. Obwohl ein Beispiel für eine Tragstruktur für einen Elektromotor, der an einem Elektromotorrad des Geländefahrzeugtyps einzurichten ist, im Folgenden beschrieben wird, ist das Einrichtungsziel nicht hierauf beschränkt, sondern es kann geändert sein. Beispielsweise kann die Tragstruktur für Elektromotorräder eines anderen Typs eingerichtet sein. 6 ist eine linke Seitenansicht eines Elektromotorrads 100 gemäß der zweiten Ausführungsform der vorliegenden Erfindung. Indessen bezeichnen die Pfeile FR, RE, L und R durchgehend in den Zeichnungen jeweils eine Vorderseite, eine Rückseite, eine linke Seite bzw. eine rechte Seite eines Chassis.
-
Wie in 6 gezeigt ist, ist das Elektromotorrad 100 mit einem aus Stahl oder einer Aluminiumlegierung hergestellten Chassisrahmen 102 versehen, an dem getrennte Teile wie eine Antriebseinheit, elektrische Komponenten und dergleichen angebracht sind. Der Chassisrahmen 102 ist von einem Lenkkopfrohr 132, das sich an einem Vorderende desselben befindet, in zwei Abschnitte geteilt und er erstreckt sich zur Rückseite desselben schräg nach unten. Eine Batterie 109 (siehe 8A bis 8C) und ein Elektromotor 103 sind jeweils an der Vorder- bzw. Rückseite in dem Chassisrahmen 102 angebracht. Eine Seitenabdeckung 104 ist an dem Chassisrahmen 102 zum Abdecken des oberen Abschnitts des Chassisrahmens 102 zum Verbessern eines Aussehens angebracht. Ein Sitz 105 ist über der Seitenabdeckung 104 angeordnet.
-
Der Sitz 105 ist von einem Paar von linken und rechten Sitzschienen 111 (siehe 7A und 7B) getragen, die sich von der Rückseite des Chassisrahmens 102 in der rückwärtigen Richtung schräg nach oben erstrecken. Ein Paar von linken und rechten Seitenrahmen 112 ist an der Rückseite des Chassisrahmens 102 angebracht, um die linken und rechten Sitzschienen 112 an unteren Abschnitten derselben zu tragen. Ein Wechselrichter 106 ist an den Sitzschienen 111 angebracht, um einen Gleichstrom von der Batterie 109 in einen Wechselstrom umzuwandeln. Der Elektromotor 103 wird von der Batterie 109 über den Wechselrichter 106 mit Energie versorgt und ein Kontroller 107 (siehe 8C), der in einem Batteriekasten 108 vorgesehen ist (siehe 8A bis 8C), steuert den Antrieb des Elektromotors 103.
-
An der Vorderseite des Chassisrahmens 102 ist ein Paar von linken und rechten Vordergabeln 114 mittels einer (nicht gezeigten) Lenkwelle auf steuerbare Weise an dem Lenkkopf 132 angebracht. Die Vordergabeln 114 sind mit vorderen Aufhängungen zur Stoßabsorption eines Vorderrads versehen, durch die Stöße von dem Vorderrad 116 nicht auf den Chassisrahmen 102 übertragen werden. Ein Griff 115 ist an der oberen Seite der Vordergabeln 114 angebracht. Das Vorderrad 116 ist durch die Vordergabeln 114 an deren unteren Abschnitten drehbar getragen. Ein vorderes Schutzblech 117 ist über dem Vorderrad 116 zur Abdeckung desselben vorgesehen.
-
An der Rückseite des Chassisrahmens 102 ist eine Schwinge 119 vertikal bewegbar mit einem Drehzentrum 118 verbunden. Eine hintere Aufhängung 121 zur Stoßabsorption eines Hinterrads ist zwischen dem Chassisrahmen 102 und der Schwinge 119 angebracht, um Stöße zwischen dem Chassisrahmen 102 und dem Hinterrad 122 zu absorbieren. Das Hinterrad 122 ist durch die Schwinge 119 an deren Rückseite drehbar getragen und ein hinteres Schutzblech 123, das an der Rückseite des Sitzes 105 vorgesehen ist, deckt den oberen Abschnitt des Hinterrads 122 ab. Energie von einer Abtriebswelle des Elektromotors 103 wird über eine Kette oder dergleichen auf das Hinterrad 122 übertragen.
-
Der Chassisrahmen 102 ist unter dem Drehzentrum 118 mit einem Seitenständer 124 versehen, der dazu dient, das Elektromotorad 101 von selbst im Stand zu halten. Da eine Drehachse des Seitenständers 124 mit einer lokalen Last beaufschlagt ist, ist der Seitenständer 124 an dem Chassisrahmen 102 über eine zugehörige Halterung 141 (siehe 8A bis 8C), die aus hochfestem Gusseisen oder geschmiedetem Aluminium hergestellt ist, angebracht. Der Elektromotor 103 ist an dem Chassisrahmen 102 in der Nähe des Seitenständers 124 angebracht. In diesem Fall ist es erforderlich, dass der Chassisrahmen 102 die Abtriebswelle des Elektromotors 103 an drei oder mehr Punkten um die Abtriebswelle trägt. Wenn jedoch die seitliche Seite des Chassisrahmens 102 eine geringe Größe aufweist, ist es schwierig, die Tragposition für den Elektromotor zu gewährleisten.
-
Demgemäß sieht die zweite Ausführungsform eine Konfiguration vor, bei der zusätzlich zu dem Chassisrahmen 102 die Halterung 141 für einen Seitenständer 124 (siehe 8A bis 8C) mit einem Tragabschnitt für den Elektromotor 103 versehen ist, wodurch der Elektromotor 103 an drei oder mehr Punkten getragen wird. Daher ist es, auch wenn die seitliche Seite des Chassisrahmens 102 verringert ist, möglich, den Umfang des Elektromotors 103 an drei oder mehr Punkten stabil zu tragen. Im Folgenden wird die Anbringungsposition des Elektromotors 103 unter Bezug auf 7A, 7B, 8A, 8B und 8C beschrieben.
-
7A und 7B sind Darstellungen, die den Chassisrahmen 102 gemäß der zweiten Ausführungsform der vorliegenden Erfindung zeigen. 8A bis 8C sind Darstellungen, die die Anbringungsposition für den Elektromotor 103 gemäß der zweiten Ausführungsform der vorliegenden Erfindung zeigen. Indessen ist 7A eine perspektivische Darstellung des Chassisrahmens 102 und 7B eine Draufsicht auf den Chassisrahmen 102. Ferner ist 8A eine linke Seitenansicht der Anbringungsposition für den Elektromotor 103, 8B eine rückwärtige Ansicht der Anbringungsposition für den Elektromotor 103 und 8C eine rechte Seitenansicht der Anbringungsposition für den Elektromotor 103. Obwohl 8A bis 8C zeigen, dass der Elektromotor 103 an dem linken Halbrahmenkörper 131L angebracht ist, ist die vorliegende Erfindung nicht hierauf beschränkt. Wenn die Seitenstütze 124 auf der rechten Seite eines Elektromotorrads vorgesehen ist, kann der Elektromotor 103 an einem rechten Halbrahmenkörper 131R angebracht sein. Ferner ist in 8A bis 8C die Batterie 109 durch eine doppelpunktiert-gestrichelte Linie angegeben.
-
Wie in 7A und 7B gezeigt ist, ist der Chassisrahmen 102 aus einem Paar von linken und rechten Halbrahmenkörpern 131L und 131R gebildet, die zusammengebaut werden. Die Halbrahmenkörper 131L, 131R sind mit Kopfrahmenteilen 133L, 133R, die das Lenkkopfrohr 132, das ein einstückiger Körper ist, halten, und Hauptrahmenteilen 134L, 134R, die sich von den Kopfrahmenteilen 133L, 133R zur Rückseite des Elektromotorrads erstrecken, versehen. Die Kopfrahmenteile 133L, 133R sind mit halbzylindrischen Vertiefungen 135 versehen (siehe 8C), die der Außenform des Lenkkopfrohrs 132 entsprechen. Die Halbrahmenkörper 131L, 131R und das Lenkkopfrohr 132 sind durch Schraubbolzen, die die Kopfrahmenteile 133L, 133R miteinander verbinden, während das Lenkkopfrohr 132 in die Vertiefungen 135 eingepasst ist, integral zusammengebaut.
-
Die Hauptrahmenteile 134L, 134R sind Hauptelemente, die den größeren Teil des Chassisrahmens 102 bilden. Wenn die Hauptrahmenteile 134L, 134R mittels einer Mehrzahl von Schraubbolzen zusammengebaut sind, ist darin ein Montageraum zur Aufnahme einer Vielzahl von Komponenten ausgebildet. Der Montageraum ist an der Vorderseite in der vertikalen Richtung geschlossen und an der Oberseite in der rückwärtigen Richtung geöffnet. Die Sitzschienen 111R, 111L sind an den oberen Seiten der Hauptrahmenteile 134L, 134R angebracht. Die Sitzschienen 111L, 111R sind an deren unteren Abschnitten durch die an den Hauptrahmenteilen 134L, 134R angebrachten Seitenrahmen 112L, 112R verstärkt. Ferner bildet der Umfang des Drehzentrums 118 der Hauptrahmenteile 134L, 134R einen Montageraum für einen Elektromotor 3 (siehe 8A).
-
Wie in 8A bis 8C gezeigt ist, ist ein oben geöffneter Batteriekasten 108 an der Seite der vorderen Hälfte des linken Hauptrahmenteils 134L derart angebracht, dass er nach hinten geneigt ist. Der Kontroller 107 ist an der linken Innenseite des Batteriekastens 108 angebracht und ein Lagerraum für eine Batterie 109 ist auf der rechten Seite des Kontrollers 107 ausgebildet. Die Batterie 109 ist in dem Batteriekasten 108 in der Nähe des Kontrollers 107 gelagert und sie versorgt den Kontroller 107 mit Energie. Der Wechselrichter 106 ist an der Sitzschiene 111L, die sich von dem linken Hauptrahmenteil 134L nach hinten erstreckt, angebracht.
-
Der Elektromotor 103 ist an der Seite der hinteren Hälfte des linken Hauptrahmenteils 134L unter dem Batteriekasten 108 angebracht. Da der Elektromotor 103 an dem unteren Abschnitt des Motorradkörpers an einem im Wesentlichen mittleren Abschnitt zwischen dem Vorderrad 116 und dem Hinterrad 122 angebracht ist (siehe 6), ist der Schwerpunkt des Motorradkörpers abgesenkt, was zu verbesserter Manövrierbarkeit und Stabilität führt. In ähnlicher Weise sind an dem linken Halbrahmenteil 131L elektrische Komponenten, die den Kontroller 107 (Batteriekasten 108), den Wechselrichter 106 und den Elektromotor 103 umfassen, integral angebracht, wodurch ein Modul gebildet wird. Der Chassisrahmen 102 kann daher durch einfachen Zusammenbau des rechten Halbrahmenkörpers 131R mit dem linken modularen Halbrahmenkörper 131L gebildet werden.
-
Die Seite der im Wesentlichen hinteren Hälfte des Elektromotors 103 ist in der Nähe des Drehzentrums 118 des linken Hauptrahmenteils 134L nach außen zugänglich bzw. offenliegend. Aus diesem Grund ist der Elektromotor 103 durch das Hauptrahmenteil 134L an zwei Tragpositionen 136, 137 um die Seite der im Wesentlichen vorderen Hälfte des Elektromotors getragen. Die Halterung 141 für einen Seitenständer 124 ist unter dem Drehzentrum 118 des Hauptrahmenteils 134L angebracht. Ein hinterer Rand 138 des Hauptrahmenteils 134L ist in der Nähe der Anbringungsposition (siehe 9A und 9B) der Halterung 141 so positioniert, dass die Halterung 141 von dem Hauptrahmenteil 134L nach außen zugänglich ist bzw. offenliegt.
-
Die Halterung 141 erstreckt sich auf der vorstehenden Fläche (dem Profil) des Elektromotors 103 nach hinten und sie trägt die Seite der im Wesentlichen hinteren Hälfte des Elektromotors 103 an einer Tragposition 144 an dem Vorderende desselben. Die Tragposition 144 der Halterung 141 ist entgegengesetzt zu den zwei Tragpositionen 136 und 137 des Hauptrahmenteils 134L positioniert, wobei die Abtriebswelle 156 des Elektromotors 103 dazwischen angeordnet ist. Somit wird der Elektromotor 103 durch das Hauptrahmenteil 134L (den Chassisrahmen 102) und die Halterung 141 an den drei Tragpositionen 136, 137 und 144 um die Abtriebswelle 156 punktförmig getragen. In ähnlicher Weise wird die Seite der hinteren Hälfte des Elektromotors 103 durch die Halterung, die sich von dem hinteren Rand 138 des Chassisrahmens 102 erstreckt, getragen.
-
Da die mechanische Festigkeit der Halterung 141 höher als die des Hauptrahmenteils 134L ist, ist es, auch wenn die Breite eines Armteils 142, das sich von dem Hauptrahmenteil 134L nach hinten erstreckt, in der vertikalen Richtung verringert ist, möglich, dass die Halterung den Elektromotor gegenüber dem Chassisrahmen 102 stabil trägt. Ferner ist der Seitenständer 124 drehbar an einer unteren Platte 143 an dem mittleren Abschnitt des Armteils 142 der Halterung 141 angebracht. Eine Schraubenfeder 148 ist zwischen jeweiligen Haken 139 und 145 dem Seitenständer 124 und der Platte 143 verbunden. Der Seitenständer 124 kehrt mittels einer Federkraft der Schraubenfeder 148 vom Boden in seine Anfangsposition zurück.
-
Die Halterung 141 ist an deren Basisende und dem Vorderende des Armteils 142 an dem Hauptrahmenteil 134L bzw. dem Elektromotor befestigt. Daher wird das Armteil 142 der Halterung 141 durch das Hauptrahmenteil 134L und den Elektromotor 103 entgegengesetzt getragen, sodass der Seitenständer 124 durch die Platte 143 stabil getragen sein kann.
-
Die Anbringungspositionen der Halterung 141 und des Elektromotors 103 für den Chassisrahmen 102 werden unter Bezug auf 9A, 9B, 10A und 10B beschrieben. 9A und 9B sind Darstellungen die die Anbringungsposition der Halterung 141 gemäß der zweiten Ausführungsform zeigen. 10A und 10B sind Darstellungen, die die Anbringungsposition des Elektromotors 103 gemäß der zweiten Ausführungsform zeigen. Indessen sind 9A und 10A perspektivische Darstellungen, die den Umfang der Halterung zeigen, und 9B und 9B Seitenansichten, die den gesamten Chassisrahmen zeigen.
-
Wie in 9A und 9B gezeigt ist, wird der Seitenständer 124 zunächst an dem Hauptrahmenteil 134L des linken Halbrahmenkörpers 131L über die Halterung 141 angebracht. Die Halterung 141 wird an dem Umfang des hinteren Randes 138 des Hautrahmenteils 134L mittels Schraubbolzen 149 an zwei Positionen an dem Basisende des Armteils 142 befestigt. Da die Halterung durch die Schraubbolzen von der Innenseite des Hauptrahmenteils 134L befestigt ist, befinden sich Schraubbolzenköpfe im Inneren des Hauptrahmenteils 134L und sie sind damit bedeckt, was das Aussehen des Motorrads verbessert. Die Halterung 141 ist von dem Hauptrahmenteil 134L auf freitragende Weise getragen und sie erstreckt sich von dem hinteren Rand 138 des Hauptrahmenteils 134L nach hinten.
-
Das Hauptrahmenteil 134L ist auf der Innenfläche desselben mit Tragteilen 151 und 152 versehen, die in der vertikalen Richtung so beabstandet sind, dass sie eher die Vorderseite als die Abtriebswelle des Elektromotors tragen (siehe 10A und 10B). Ferner ist die Halterung 141 an dem Vorderende des Armteils 142 mit einem anderen Tragteil 153 versehen, das eher die Rückseite des Elektromotors 103 als dessen Abtriebswelle trägt. Die Halterung 141 ist an dem Hauptrahmenteil 134L als solche befestigt, sodass insgesamt drei Tragteile 151, 152 und 153 an den zwei Stellen an dem Hauptrahmenteil 134L und einer Stelle an der Halterung 141 vorgesehen sind.
-
Als nächstes wird, wie in 10A und 10B gezeigt ist, der Elektromotor 103 an den Tragteilen 151, 152 und 153 an dem Hauptrahmenteil 134L und der Halterung 141 angebracht (siehe 9A und 9B). Die Vorderseite des Elektromotors 103 wird an den Tragteilen 151 und 152 des Hauptrahmenteils 134L angebracht und die Rückseite des Elektromotors 103 wird an dem Tragteil 153 der Halterung 141 angebracht. Da der Elektromotor 103 an dem Hauptrahmenteil 134L und der Halterung 151 mittels Schraubbolzen 154 (nur ein Schraubbolzen ist gezeigt) von der Innenseite desselben befestigt ist, befinden sich Schraubbolzenköpfe in Inneren des Hauptrahmenteils 134L und der Halterung 141 und sie sind dadurch abgedeckt, wodurch das Aussehen verbessert ist.
-
In ähnlicher Weise ist der Elektromotor 103 von dem Hauptrahmenteil 134L und der Halterung 141 an drei Punkten um die Abtriebswelle des Elektromotors getragen. Aus diesem Grund wird einer Reaktion gegenüber der auf die Abtriebswelle des Elektromotors ausgeübten Antriebskraft entgegengewirkt, wodurch der Elektromotor 103 stabil getragen wird. Ferner ist, da das Armteil 142 der Halterung 141 in der vorstehenden Fläche des Elektromotors 103 positioniert ist, das Tragteil 143 der Halterung 141 in der Nähe des Hauptkörpers des Elektromotors 103 positioniert. Daher ist eine Konfiguration so ausgeführt, dass das Tragteil 153 der Halterung 141 nahe dem Hauptrahmenteil 134L positioniert ist, wobei ein kompakter leichter Chassisrahmen gebildet wird. In diesem Fall ist, da sich die Platte 143 der Halterung 141 von der vorstehenden Oberfläche des Elektromotors 103 nach unten erstreckt, wobei sie nach außen offenliegt, der Seitenständer 124 außerhalb der Abdeckung des Elektromotors 103. Ferner kann, da die Halterung 141 und der Seitenständer 124 unter dem Drehzentrum 118 an dem mittleren Abschnitt des Motorrads positioniert sind, eine zentralisierte und verringerte Masse erhalten werden.
-
Da der Elektromotor an dem Vorderende des Armteils 142 an der Halterung 141 angebracht ist, ist das Armteil 142 durch das Hauptrahmenteil 134L und den Elektromotor 103 in einer freitragenden Weise getragen. Daher ist der Seitenständer 124 durch das Hauptrahmenteil 134L über die Halterung 141 stabil getragen. Ferner ist der Elektromotor 103 an dem Hauptrahmenteil 134L angebracht, wobei die Seite der im Wesentlichen hinteren Hälfte desselben nach außen offenliegt. Aus diesem Grund ist die seitliche Seite des Hauptrahmenteils 134L (der Chassisrahmen 102) verkleinert, wodurch zur Bildung eines kompakten, leichten Chassisrahmens 102 beigetragen wird. Ferner ist eine Form zum Gießen des Chassisrahmens 102 ebenfalls verkleinert, wodurch Kosten gespart werden.
-
Gemäß der vorliegenden Erfindung ist der Elektromotor 103 durch die Halterung 141 für einen Seitenständer 124 sowie den Chassisrahmen 102 so getragen, dass der Elektromotor 103 an drei oder mehr Punkten um die Abtriebswelle des Elektromotors 103 getragen sein kann, auch wenn die seitliche Seite des Chassisrahmens 102 verkleinert ist. Demgemäß kann der Elektromotor 103 durch den Chassisrahmen 102 und die Halterung 141 stabil getragen werden. Ferner ist, da der Rahmen 141 für einen Seitenständer 124 als ein Abschnitt des Chassisrahmens 102 als eine Tragposition für den Elektromotor 103 dient, die Tragposition für den Elektromotor 103 in dem Chassisrahmen 102 mit dem Vorsehen der Halterung 141 nicht beschränkt. Ferner ist es, da die Halterung 141 für einen Seitenständer 124 als die Tragposition für den Elektromotor 103 dient, nicht erforderlich, ein Tragelement für den Elektromotor 103 getrennt herzustellen, wodurch die Zahl von Teilen verringert wird.
-
Indessen kann die vorliegende Erfindung zu einer Vielzahl von Formen modifiziert werden, ohne auf die gezeigten Ausführungsformen beschränkt zu sein. In den gezeigten Ausführungsformen sind die Größen oder Formen der Komponenten nicht auf die in den Zeichnungen gezeigten Größen oder Formen beschränkt, sondern sie können in passender Weise innerhalb des Umfangs, den die Wirkung der Erfindung zeigt, geändert werden. Ferner ist es möglich, Ausführungsformen in passender Weise zu modifizieren und zu implementieren, ohne von dem Zielumfang der Erfindung abzuweichen.
-
Beispielsweise ist, obwohl der Elektromotor 103 durch den Chassisrahmen 102 und die Halterung 141 für einen Seitenständer 124 an drei oder mehr Punkten gemäß der zweiten Ausführungsform getragen ist, die vorliegende Erfindung nicht hierauf beschränkt. Der Elektromotor 103 kann von dem Chassisrahmen 102 und dem Seitenständer 124 an drei oder mehr Punkten, beispielsweise vier Punkten getragen sein.
-
Ferner ist, obwohl der Elektromotor 103 und die Halterung 141 gemäß der zweiten Ausführungsform an dem Chassisrahmen 102 von der Innenseite des Chassisrahmens durch Schraubbolzen befestigt sind, die vorliegende Erfindung hierauf nicht beschränkt. Der Elektromotor 103 und die Halterung 141 können von der Außenseite des Chassisrahmens an dem Chassisrahmen 102 durch Schraubbolzen befestigt sein.
-
Ferner ist, obwohl der Elektromotor 103 gemäß der zweiten Ausführungsform an dem Chassisrahmen 102 und der Halterung 141 durch Schraubbolzen befestigt ist, die vorliegende Erfindung nicht hierauf beschränkt. Der Elektromotor 103 kann an dem Chassisrahmen 102 und dem Seitenständer 124 mittels eines beliebigen Verfahrens, beispielsweise Schweißen oder Pressverbinden, befestigt werden.
-
Ferner ist, obwohl gemäß der zweiten Ausführungsform der Chassisrahmen 102 aus Gussaluminium gebildet ist und die Halterung 141 aus geschmiedetem Eisen oder Aluminium gebildet ist, die vorliegende Erfindung nicht hierauf beschränkt. Der Chassisrahmen 102 und die Halterung 141 können aus einem gleichen Material gebildet sein. Beispielsweise können der Chassisrahmen 102 und die Halterung 141 aus Gussaluminium gebildet sein.
-
Ferner ist, obwohl gemäß der zweiten Ausführungsform der Elektromotor 103 von einem links/rechts-geteilten Chassisrahmen 102 und der Halterung 141 getragen ist, die vorliegende Erfindung nicht hierauf beschränkt. Der Elektromotor 103 kann von einem links/rechts-integrierten Chassisrahmen 102 und der Halterung 141 getragen sein.
-
Wie im Vorhergehenden angegeben ist, stellt die Tragstruktur der vorliegenden Erfindung die Wirkung eines stabilen Tragens eines Elektromotors bereit, während die Anbringungsposition einer Halterung für einen Seitenständer an einem Chassisrahmen gewährleistet ist, und sie ist besonders günstig zum Tragen eines Elektromotors an einem aus Gussaluminium hergestellten Chassisrahmen.