-
HINTERGRUND DER ERFINDUNG
-
Die
vorliegende Erfindung betrifft ein Drehwinkel-Messgerät,
das Magnetwiderstandselemente (nachstehend auch als MR-Elemente
bezeichnet) verwendet.
-
Ein
solches Drehwinkel-Messgerät, das MR-Elemente verwendet,
ist beispielsweise in
JP-3799270 offenbart.
-
Als
MR-Elemente sind anisotope Magneto- bzw. Magnetwiderstandselemente
(nachstehend als AMR-Elemente bezeichnet) und Riesenmagneto- bzw.
Riesenmagnetwiderstandselemente (nachstehend als GMR-Elemente bezeichnet)
bekannt. Das allgemeine Prinzip des verwandten Standes der Technik
wird nachstehend beschrieben, wobei ein Magnetfeld-Messgerät,
das GMR-Elemente verwendet, als Beispiel dient.
-
2 zeigt
den grundlegenden Aufbau eines GMR-Elements. Das GMR-Element umfasst
eine erste Magnetschicht (verstiftete Magnetschicht), eine zweite
Magnetschicht (freie Magnetschicht) und eine nicht-magnetische Schicht
(Abstandsschicht), die zwischen die erste und zweite Magnetschicht
eingefügt ist. Wenn das GMR-Element in ein externes Magnetfeld
platziert wird, ändert sich die Magnetisierungsrichtung 20 in
der freien Magnetschicht in Abhängigkeit von der Ausrichtung
des externen Magnetfelds, während die Magnetisierungsrichtung
in der verstifteten Magnetschicht unverändert bleibt.
-
Wenn
an das GMR-Element eine Spannung angelegt wird, fließt
Strom nach Maßgabe des Elementwiderstands. Der Elementwiderstand
variiert in Abhängigkeit von der Differenz Δθ = θf – θp zwischen
der Magnetisierungsrichtung θp der
verstifteten Magnetschicht und der Magnetisierungsrichtung θf der freien Magnetschicht. Dementsprechend
kann, wenn die Magnetisierungsrichtung θp der
verstifteten Magnetschicht zuvor bekannt ist, die Magnetisierungsrichtung θf der freien Magnetschicht, d. h. die Ausrichtung
des externen Magnetfelds, durch Messen des Widerstands des GMR-Elements
und Verwenden der obigen Differenzbeziehung erfasst werden.
-
Der
Mechanismus des Widerstands des GMR-Elements, der sich nach Maßgabe
der Beziehung Δθ = θf – θp ändert, ist wie folgt.
-
Die
Magnetisierungsrichtung in einem Dünnfilm-Magnetfilm hängt
mit der Richtung des Elektronenspins im Magnetfilm zusammen. Wenn Δθ =
0, neigt die Spinrichtung einer Mehrheit von Elektronen in der freien
Magnetschicht dazu, mit der Spinrichtung einer Mehrheit von Elektronen
in der verstifteten Magnetschicht zusammenzufallen. Wenn andererseits Δθ =
180°, neigt die Spinrichtung einer Mehrheit von Elektronen
in der freien Magnetschicht dazu, entgegengesetzt zu der Spinrichtung
einer Mehrheit von Elektronen in der verstifteten Magnetschicht
zu sein.
-
3A und 3B zeigen
schematisch im Querschnitt eine freie Magnetschicht 11,
eine Abstandsschicht 12 und eine verstiftete Magnetschicht 13.
Pfeile in der freien Magnetschicht 11 und der verstifteten
Magnetschicht 13 geben die Spinrichtungen der mehrheitlichen
Elektronen an. 3A zeigt den Fall, in dem Δθ =
0, d. h., die Spinrichtung der freien Magnetschicht 11 fällt
mit derjenigen der verstifteten Magnetschicht 13 zusammen. 3B zeigt
den Fall, in dem Δθ = 180°, d. h., die
Spinrichtung der freien Magnetschicht 11 ist entgegengesetzt
zu derjenigen der verstifteten Magnetschicht 13. Im Fall
von Δθ = 0, wie in 3A gezeigt, sind
Elektronen, die die Spinrichtung nach rechts aufweisen und von der
verstifteten Magnetschicht 13 freigesetzt werden, weniger
häufig in der freien Magnetschicht 11 verstreut,
deren mehrheitliche Elektronen die Spinrichtung nach rechts aufweisen
und sich entlang eines Wegs wie etwa einer Elektronenflugbahn 810 bewegen. Andererseits
sind im Fall von Δθ = 180°, wie in 3B gezeigt,
Elektronen, die die Spinrichtung nach rechts aufweisen und von der
verstifteten Magnetschicht 13 freigesetzt werden, häufiger
in der freien Magnetschicht 11 verstreut, deren mehrheitliche
Elektronen die Spinrichtung nach links aufweisen und sich entlang
eines Wegs wie etwa einer Elektronenflugbahn 810 bewegen.
Auf diese Weise ist, wenn Δθ = 180°,
die Elektronenstreuung beträchtlich, so dass der elektrische
Widerstand im GMR-Element zunimmt.
-
Im
zwischenliegenden Fall von Δθ = 0~180° wird
die Elektronenflugbahn etwas zwischen denjenigen liegend, die in 3A und 3B gezeigt
sind. Der Widerstand des GMR-Elements wird bekanntermaßen durch
den folgenden Ausdruck dargestellt.
-
[Ausdruck 1]
-
-
R = R'0 + G / 2
(1 – cosΔθ)
= R0 – G / 2
cosΔθ (1)
-
Vorliegend
wird G/R als der GMR-Koeffizient bezeichnet, der einen Wert von
einigen bis mehreren zehn Prozent aufweist.
-
Wie
vorstehend beschrieben, wird das GMR-Element auch als Spin-Ventilvorrichtung
bezeichnet, da elektrischer Strom (und damit elektrischer Widerstand)
durch das GMR-Element in Abhängigkeit von der Richtung
des Elektronenspins gesteuert werden kann.
-
Des
Weiteren kann mit einem Magnetfilm, der eine geringe Filmdicke aufweist
(Dünnfilm-Magnetfilme), der Magnetisierungsvektor nicht
in der normalen Richtung (Richtung der Filmdicke) aufsteigen und
bleibt auf der Ebene der Oberfläche liegen, da der Entmagnetisierungsfaktor
in der normalen Richtung bezüglich der Oberfläche
extrem groß ist. Da jede der freien Magnetschicht 11 und
der verstifteten Magnetschicht 13, die das GMR-Element
bilden, ausreichend dünn ist, so dass die Magnetisierungsvektoren
der Schichten 11 und 13 in ihren Ebenen liegen.
-
In
einem Magnetfeld-Messgerät bilden vier GMR-Elemente R1 (51-1)~ R4 (51-4)
eine Wheatstone-Brücke, wie in 4 gezeigt.
Dabei sei angenommen, dass die Magnetisierungsrichtung in den verstifteten
Magnetschichten der GNR-Elemente R1 (51-1)
und R3 (51-3) durch θp = 0 gegeben ist, während diejenige
der GNR-Elemente R2 (51-2) und
R4 (51-4) durch θp = 180° gegeben ist. Da die Magnetisierungsrichtungen
in den freien Magnetfeldern der vier GMR-Elemente in Abhängigkeit
von der Ausrichtung des externen Magnetfelds bestimmt werden, werden
sie einander gleich. Daher gilt, dass Δθ2 = θf – θp2 = θf – θp1 – π = Δθ1 + π. Da Δθ1 mit θp =
0 als Referenz gesetzt ist, wird dabei die Ersetzung Δθ1 = 0 eingeführt. Wie aus dem Ausdruck
(1) ersichtlich, folgt dementsprechend, dass für R1 und R3 (n = 1,
3):
-
[Ausdruck 2]
-
-
Rn =
Rn0 + G / 2
(1 – cosθ) (2)
-
Und
es folgt, dass für R2 und R4 (n = 2, 4):
-
[Ausdruck 3]
-
-
Rn =
Rn0 + G / 2
(1 + cosθ) (3)
-
Wenn
eine Erregungsspannung e
0 an die in
4 gezeigte
Brücke angelegt wird, ist die Differenzspannung ΔV
= V
2 – V
1 zwischen
den Anschlüssen 1 und 2 durch den folgenden Ausdruck gegeben. [Ausdruck
4]
-
Wenn
die Ausdrücke (2) und (3) für den Ausdruck (4)
eingesetzt werden, wenn angenommen wird, dass R
n0's
für n = 1~4 gleich sind und dass R
0 =
R
n0, dann folgt daraus, dass: [Ausdruck
5]
-
Da
die Signalspannung ΔV proportional zu cosθ ist,
kann auf diese Weise die Ausrichtung des Magnetfelds erfasst werden.
-
Somit
ist das Magnetwiderstandselement dadurch gekennzeichnet, dass es
die Ausrichtung des Magnetfelds direkt messen kann.
-
Es
ist ein Drehwinkel-Messgerät, das einen Drehmelder verwendet,
bekannt und ein solches ist in
JP-A-2008-11661 offenbart. Wie in
JP-A-2008-11661 offenbart
ist, misst der Drehmelder die Änderung der Induktanz entlang
des geschlossenen Wegs: Statorspule ~ Rotorkern ~ Statorspule. Durch
entsprechendes Entwerfen der Form des Rotorkerns kann die Länge
des Luftspalts zwischen dem Rotorkern und dem Stator in Abhängigkeit
von dem Drehwinkel des Rotors variabel gemacht werden. Daher ändert
sich die Induktanz entsprechend. Deshalb kann der Drehwinkel des
Rotorkerns durch Messen der Änderung der Induktanz gemessen
werden.
-
Auf
diese Weise, mit einem Drehwinkelsensor, dessen typisches Beispiel
ein Drehmelder ist, der die Induktanz misst, beeinflusst die Genauigkeit
des Luftspalts die Genauigkeit der Winkelmessung, so dass bei der
Herstellung und Montage große Genauigkeit erforderlich
ist. Des Weiteren verursacht eine Vergrößerung des
Durchmessers der Rotorwelle eine Erhöhung der Größe
des Drehmelders. Dies führt zu dem Problem der Kostensteigerung.
-
Andererseits
ist die Größe eines Magnetwiderstandselements,
wie etwa eines GMR-Elements, ein Quadrat mit einer Seite von höchstens
ein paar Millimetern. Daher kann man sagen, dass es von geringer
Größe und leichtem Gewicht ist. Des Weiteren kann,
da das Magnetwiderstandselement die Ausrichtung des Magnetfelds
erfasst, ein Sensor von geringer Größe selbst
dann verwendet werden, wenn eine dicke Rotorwelle benutzt wird.
-
Wenn
es gewünscht wird, ein Drehwinkel-Messgerät von
geringer Größe zu bauen, kann dementsprechend
die Verwendung von Magnetwiderstandselementen in vorteilhafter Weise
ein gewünschtes Gerät von geringerer Größe
und leichterem Gewicht bereitstellen. Wenn es weiterhin gewünscht
ist, einen Elektromotor mit großer Belastbarkeit zu steuern,
kann die Verwendung von Magnetwiderstandselementen in vorteilhafter Weise
ein kostengünstiges Drehwinkel-Messgerät zur Verfügung
stellen.
-
ZUSAMMENFASSUNG DER ERFINDUNG
-
Bisher
hat das Problem bestanden, dass, wenn in einem konventionellen Drehwinkel-Messgerät,
das Magnetwiderstandselemente verwendet, ein Magnetsensor angebracht
ist, die mechanische Ausrichtung des Magnetsensors schwierig ist.
-
Ein
solches konventionelles Drehwinkel-Messgerät hat bisher
unter dem Problem gelitten, dass, wenn es elektrisch korrigiert
werden soll, ein Aktuator/Kodierer für die Korrektur vorbereitet
und an das Gerät gekoppelt werden muss.
-
Weiterhin
haben die obigen Probleme auch zu dem weiteren Problem geführt,
dass eine Korrektur schwierig ist, wenn sie versucht wird, nachdem
ein Drehwinkel-Messgerät in ein System eingebaut worden
ist, sowie zu dem weiteren Problem, dass, wenn das bereits in ein
System eingebaute Drehwinkel-Messgerät durch ein neues
ausgetauscht wird, die Korrektur des neuen Geräts schwierig
ist, das heißt, der Austausch eines Drehwinkel-Messgeräts
in der Tat schwierig ist.
-
Weiterhin
weist ein konventionelles Drehwinkel-Messgerät das Problem
auf, dass sich, wenn eine magnetische Substanz oder ein Material
von hoher Permeabilität in der Nähe des konventionellen
Drehwinkel-Messgeräts vorhanden ist, die Genauigkeit der
Messung des Drehwinkels verschlechtert.
-
Weiterhin
weist ein konventionelles Drehwinkel-Messgerät das Problem
auf, dass, wenn die Verteilung des Magnetfelds in komplizierter
Weise aufgrund des Vorhandenseins einer magnetischen Substanz oder
eines Materials von hoher Permeabilität in der Nähe
des konventionellen Drehwinkel-Messgeräts geändert
wird, eine Korrektur nicht ausreichend durchgeführt werden
kann.
-
Noch
weiter weist ein konventionelles Drehwinkel-Messgerät das
Problem auf, dass, wenn es in einen wasserdichten Aufbau eingebaut
wird, der Aufbau des Teils, durch das die Signalführungsdrähte
herausgezogen werden, kompliziert wird, so dass die Gesamtmontage
kompliziert wird.
-
Noch
weiter weist ein konventionelles Drehwinkel-Messgerät das
Problem auf, dass die Berechung eines Drehwinkels aus der Ausgabe
des Magnetsensors beträchtliche Zeit erfordert, so dass
die Berechnung eines Drehwinkels auf die Messung des Drehwinkels
der Drehwelle bei Hochgeschwindigkeitsbetrieb nicht schnell genug
reagieren kann.
-
Gemäß dieser
Erfindung, die gemacht worden ist, um verschiedene der oben genannten
Probleme zu lösen, wird ein Drehwinkel-Messgerät
bereitgestellt, dessen Korrektur elektrisch durchgeführt
werden kann, ohne auf einen Korrekturkodierer zurückzugreifen.
-
Als
Ergebnis wurde es möglich, nur den Sensor selbst zu ersetzen,
selbst nachdem das Gerät in einem System, wie etwa einem
Kraftfahrzeug, eingebaut worden war. Dies liegt daran, dass das
eigentliche Drehwinkel-Messgerät nach seinem Austausch
korrigiert werden kann.
-
Diese
Erfindung wird als einige Ausführungsbeispiele wie folgt
zusammengefasst.
-
Ein
Ausführungsbeispiel ist ein Drehwinkel-Messgerät,
das einen Elektromotor mit einer Drehwelle umfasst, einen an einem
Ende der Drehwelle angebrachten Magneten und einen Magnetsensor,
dessen Ausgangssignal sich nach Maßgabe der Ausrichtung
des den Magnetsensor umgebenden Magnetfelds ändert, und
der ein Winkelsignal ausgibt, das den Drehwinkel der Drehwelle repräsentiert,
wobei das Drehwinkel-Messgerät einen Korrekturablauf aufweist,
in dem die Drehwelle des Elektromotors durch mehr als eine Umdrehung
mit einer Drehzahl gedreht wird, deren Änderungsgeschwindigkeit
im Lauf der Zeit bekannt ist, so dass das Winkelsignal korrigiert
werden kann.
-
Ein
weiteres Ausführungsbeispiel ist ein Drehwinkel-Messgerät,
das einen Elektromotor mit einer Drehwelle umfasst, einen an einem
Ende der Drehwelle angebrachten Magneten und einen Magnetsensor, dessen
Ausgangssignal sich nach Maßgabe der Ausrichtung des den
Magnetsensor umgebenden Magnetfelds ändert, und der ein
Winkelsignal ausgibt, das den Drehwinkel der Drehwelle repräsentiert,
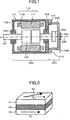
wobei der Elektromotor, die Drehwelle und der Magnet von einem Gestell
bedeckt sind; der Magnetsensor außerhalb des Gestells angeordnet
ist; das Gestell einen Gestellhauptkörper, der den Elektromotor
abdeckt, und eine Gestellgehäuseeinheit, die den Magneten
abdeckt, aufweist; die Gestellgehäuseeinheit aus einem
Material hergestellt ist, das eine magnetische Suszeptibilität
von höchstens 0,01 aufweist; und wobei das Drehwinkel-Messgerät
einen Korrekturablauf aufweist, in dem die Drehwelle des Elektromotors
durch mehr als eine Umdrehung mit einer Drehzahl gedreht wird, deren Änderungsgeschwindigkeit
im Lauf der Zeit bekannt ist, so dass das Winkelsignal korrigiert
werden kann.
-
Ein
noch weiteres Ausführungsbeispiel ist ein Drehwinkel-Messgerät,
das einen Elektromotor umfasst, der eine Drehwelle, einem an einem
Ende der Drehwelle angebrachten Magneten und einen Magnetsensor aufweist,
dessen Ausgangssignal sich nach Maßgabe der Ausrichtung
des den Magnetsensor umgebenden Magnetfelds ändert; und
der ein Winkelsignal ausgibt, das den Drehwinkel der Drehwelle repräsentiert,
wobei der Elektromotor, die Drehwelle und der Magnet von einem Gestell
bedeckt sind; der Magnetsensor außerhalb des Gestells angeordnet
ist; das Gestell einen Gestellhauptkörper, der den Elektromotor
abdeckt, und eine Gestellgehäuseeinheit, die den Magneten
abdeckt, aufweist; die Gestellgehäuseeinheit aus einem
Material hergestellt ist, das eine magnetische Suszeptibilität
von höchstens 0,01 aufweist; die Gestellgehäuseeinheit
und der Magnetsensor mit einem Abschirmungskomponente abgedeckt
sind; und die Abschirmungskomponente aus einem Material hergestellt
ist, das eine magnetische Suszeptibilität von mindestens
1000 aufweist.
-
Ein
noch weiteres Ausführungsbeispiel ist ein Drehwinkel-Messgerät,
das einen Elektromotor umfasst, der eine Drehwelle, einen an einem
Ende der Drehwelle angebrachten Magneten und einen Magnetsensor aufweist,
dessen Ausgangssignal sich nach Maßgabe der Ausrichtung
des den Magnetsensor umgebenden Magnetfelds ändert, und
der ein Winkelsignal ausgibt, das den Drehwinkel der Drehwelle repräsentiert,
wobei der Elektromotor, die Drehwelle und der Magnet von einem Gestell
bedeckt sind; der Magnetsensor außerhalb des Gestells angeordnet
ist; das Gestell einen Gestellhauptkörper, der den Elektromotor
abdeckt, und eine Gestellgehäuseeinheit, die den Magneten
abdeckt, aufweist; die Gestellgehäuseeinheit aus Material
hergestellt ist, das eine magnetische Suszeptibilität von
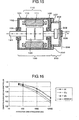
höchstens 0,01 aufweist; und die Dicke t(m) jenes Teils
der Gestellgehäuseeinheit, die sich zwischen dem Magneten
und dem Magnetsensor befindet, durch die Ungleichung:
gegeben ist, wobei N
p für die Hälfte der Anzahl
der Magnetpole des Magneten steht, f(Hz) für die maximale Drehfrequenz
der Drehwelle steht, χ für die magnetische Suszeptibilität
der Gestellgehäuseeinheit steht und ρ (Ωm)
für den elektrischen Widerstand der Gestellgehäuseeinheit
steht.
-
Ein
noch weiteres Ausführungsbeispiel ist ein Drehwinkel-Messgerät,
das einen Elektromotor umfasst, der eine Drehwelle, einen an einem
Ende der Drehwelle angebrachten Magneten und einen Magnetsensor aufweist,
dessen Ausgangssignal sich nach Maßgabe der Ausrichtung
des den Magnetsensor umgebenden Magnetfelds ändert, und
der ein Winkelsignal ausgibt, das den Drehwinkel der Drehwelle repräsentiert,
wobei der Magnetsensor eine erste Brücke aufweist, die
ein erstes Signal ausgibt, welches proportional zum Kosinus des
Drehwinkels der Drehwelle ist, und eine zweite Brücke aufweist,
die ein zweites Signal ausgibt, welches proportional zum Sinus des
Drehwinkels der Drehwelle ist; und das Geschwindigkeitssignal aus
dem Verhältnis der Zeitableitung vom ersten Signal zum
zweiten Signal berechnet wird.
-
Ein
noch weiteres Ausführungsbeispiel ist ein Drehwinkel-Messgerät,
das einen Elektromotor umfasst, der eine Drehwelle, einen an einem
Ende der Drehwelle angebrachten Magneten und einen Magnetsensor umfasst,
dessen Ausgangssignal sich nach Maßgabe der Ausrichtung
des den Magnetsensor umgebenden Magnetfelds ändert, und
der ein Winkelsignal ausgibt, das den Drehwinkel der Drehwelle repräsentiert,
wobei der Magnetsensor eine erste Brücke aufweist, die
ein erstes Signal ausgibt, welches proportional zum Kosinus des
Drehwinkels der Drehwelle ist, und eine zweite Brücke aufweist,
die ein zweites Signal ausgibt, welches proportional zum Sinus des
Drehwinkels der Drehwelle ist; ein erstes Zwischensignal als das
Verhältnis der Zeitableitung des ersten Signals zu dem
zweiten Signal definiert ist; ein zweites Zwischensignal als das
Verhältnis der Zeitableitung des ersten Signals zu dem
zweiten Signal definiert ist; und ein Fehlererfassungssignal ausgegeben
wird, wenn die Differenz des ersten Zwischensignals von dem zweiten
Zwischensignal einen voreingestellten Wertebereich überschreitet.
-
Wie
vorstehend beschrieben, kann gemäß dieser Erfindung
die Korrektur eines Drehwinkel-Messgeräts durchgeführt
werden, ohne einen Aktuator/Kodierer für die Korrektur
zu verwenden.
-
Als
Ergebnis wurde es möglich, nur den eigentlichen Sensor
zu ersetzen, selbst nachdem das Gerät in einem System,
wie etwa einem Kraftfahrzeug, eingebaut worden war. Dies liegt daran,
dass das Drehwinkel-Messgerät selbst nach seinem Austausch
korrigiert werden kann.
-
Gemäß dieser
Erfindung wird die Messung von Winkeln mit hoher Genauigkeit selbst
in einem System möglich, in dem eine magnetische Substanz
oder ein Material von hoher Permeabilität in der Nähe
des Drehwinkel-Messgeräts vorhanden ist.
-
Gemäß dieser
Erfindung kann ein Drehwinkel-Messgerät realisiert werden,
das ausreichend reagiert, das heißt, imstande ist, Hochgeschwindigkeitsdrehungen
zu folgen.
-
Gemäß dieser
Erfindung kann die Zuverlässigkeit durch Ausgeben eines
Fehlererfassungssignals verbessert werden, wenn ein anormaler Zustand
in einem Drehwinkel-Messgerät oder einem Drehzahl-Messgerät auftritt.
-
Weitere
Aufgaben, Merkmale und Vorteile der Erfindung werden aus der folgenden
Beschreibung der Ausführungsbeispiele der Erfindung in
Verbindung mit den beigefügten Zeichnungen ersichtlich.
-
KURZE BESCHREIBUNG DER ZEICHNUNGEN
-
1 ist
eine Querschnittsansicht eines Drehwinkel-Messgeräts als
dem fünften Ausführungsbeispiel dieser Erfindung;
-
2 zeigt
schematisch den Aufbau eines Riesenmagnetwiderstandselements;
-
3A und 3B veranschaulichen
schematisch das Verhalten von Elektronen in einem Riesenmagnetwiderstandselement;
-
4 zeigt
schematisch einen Brückenaufbau, der in dem Magnetsensor
eingebaut ist, der in dem Drehwinkel-Messgerät als dem
ersten Ausführungsbeispiel dieser Erfindung verwendet wird,
-
5 ist
eine Querschnittsansicht eines Drehwinkel-Messgeräts als
dem ersten Ausführungsbeispiel dieser Erfindung;
-
6 ist
ein Bild, das zum Beschreibung der Beziehung zwischen der Größe
des Magnetsensors und der Anbringungsungenauigkeit verwendet wird;
-
7 zeigt
grafisch die Beziehung zwischen Magnetfeldwinkel und Rotorwinkel;
-
8 zeigt
grafisch die Differenz δ zwischen Magnetfeldwinkel und
Rotorwinkel;
-
9 ist
ein Bild, das die Ausrichtung des Magnetfelds auf dem Außenumfang
eines Sensormagneten veranschaulicht;
-
10 veranschaulicht
den Ablauf zum Versetzen des in dem ersten Ausführungsbeispiel
dieser Erfindung verwendeten Magnetsensors;
-
11A und 11B sind
ein Bild, das zur Beschreibung des Ablaufs zum Einstellen des Winkelursprungs
in dem ersten Ausführungsbeispiel dieser Erfindung verwendet
wird;
-
12A und 12B sind
ein Bild, das zum Beschreiben des Ablaufs zum Einstellen der Nachschlagetabelle
verwendet wird;
-
13 zeigt
grafisch die Beziehung der Zeit zum Drehwinkel während
einer Drehung bei konstanter Geschwindigkeit;
-
14 ist
ein Bild, das zum Veranschaulichen der Winkelkoordinaten dient,
die in einem System verwendet werden, in dem ein Drehwinkel-Messgerät
gemäß dieser Erfindung eingebaut ist;
-
15 ist
eine Querschnittsansicht eines Drehwinkel-Messgeräts als
dem fünften Ausführungsbeispiel dieser Erfindung;
-
16 zeigt
grafisch die Beziehung zwischen der Drehfrequenz der Drehwelle und
der Übertragung des Magnetfelds;
-
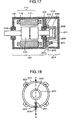
17 ist
eine Querschnittsansicht eines Drehwinkel-Messgeräts als
dem siebten Ausführungsbeispiel dieser Erfindung;
-
18 ist
eine Seitenansicht des Drehwinkel-Messgeräts als dem siebten
Ausführungsbeispiel dieser Erfindung;
-
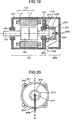
19 ist
eine Querschnittsansicht eines Drehwinkel-Messgeräts als
dem achten Ausführungsbeispiel dieser Erfindung;
-
20 ist
eine Seitenansicht des Drehwinkel-Messgeräts als dem achten
Ausführungsbeispiel dieser Erfindung;
-
21 ist
eine Querschnittsansicht eines Drehzahl-Messgeräts als
dem neunten Ausführungsbeispiel dieser Erfindung;
-
22 ist
ein Diagramm, das zum Beschreiben des Algorithmus der Signalverarbeitung
in dem Drehzahl-Messgerät als dem neunten Ausführungsbeispiel
dieser Erfindung verwendet wird;
-
23 ist
ein Diagramm, das zum Beschreiben des Algorithmus der Signalverarbeitung
in einem Drehzahl-Messgerät als dem zehnten Ausführungsbeispiel
dieser Erfindung verwendet wird;
-
24 zeigt
schematisch den Aufbau der in dem ersten Ausführungsbeispiel
dieser Erfindung verwendeten Sensorelementeinheit;
-
25 zeigt
schematisch den Aufbau des in dem ersten Ausführungsbeispiel
dieser Erfindung verwendeten Magnetsensors;
-
26 zeigt
schematisch den Aufbau der in dem zweiten Ausführungsbeispiel
dieser Erfindung verwendeten Sensorelementeinheit;
-
27 ist
ein Diagramm, das zum Beschreiben der Anregungsspannungswellenformen
und der Erfassungszeiteinstellung in dem dritten Ausführungsbeispiel
dieser Erfindung verwendet wird;
-
28 zeigt
schematisch den Aufbau der in dem vierten Ausführungsbeispiel
dieser Erfindung verwendeten Sensorelementeinheit;
-
29 ist
ein Diagramm, das zum Beschreiben der Anregungsspannungswellenformen
und der Erfassungszeiteinstellung in dem vierten Ausführungsbeispiel
dieser Erfindung verwendet wird;
-
30A und 30B zeigen
schematisch den Aufbau des in dem elften Ausführungsbeispiel
dieser Erfindung verwendeten Magnetsensors; und
-
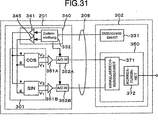
31 zeigt
schematisch die Aufbauten des Magnetsensors und der Erfassungsschaltungseinheit, die
in dem elften Ausführungsbeispiel dieser Erfindung verwendet
werden.
-
DETAILLIERTE BESCHREIBUNG
DER AUSFÜHRUNGSBEISPIELE
-
Diese
Erfindung wird nun nachstehend unter Bezugnahme auf die beigefügten
Zeichnungen, die Ausführungsbeispiele dieser Erfindungen
zeigen, detailliert beschrieben. Zuerst wird das erste Ausführungsbeispiel
eines Magnetfelderfassungsgeräts gemäß dieser
Erfindung beispielhaft als Magnetfelderfassungsgerät dargestellt,
das aus Riesenmagnetwiderstands(GMR)-Elementen besteht.
-
5 zeigt
ein erstes Ausführungsbeispiel eines Drehwinkel-Messgeräts
gemäß dieser Erfindung.
-
5 ist
eine Querschnittsansicht eines Drehwinkel-Messgeräts als
dem ersten Ausführungsbeispiel dieser Erfindung. Dieses
Ausführungsbeispiel umfasst eine Motoreinheit 100 und
eine Drehwinkel-Messeinheit 200.
-
Die
Motoreinheit 100 umfasst einen Stator 110, der
hauptsächlich aus mehreren feststehenden Magnetpolen und
einem Rotor 120 besteht, welcher hauptsächlich
aus mehreren drehbaren Magnetpolen besteht. In dieser Motoreinheit 100 wird
ein Drehmoment durch magnetische Interaktion zwischen den mehreren
feststehenden Magnetpolen und den mehreren drehbaren Magnetpolen,
die gedreht werden, erzeugt. Der Stator 110 umfasst einen
Statorkern 111 und eine Statorspule 112, die um
den Statorkern 111 gewickelt ist. Der Rotor 120 ist
in der zylindrischen Innenfläche des Stators 110 angeordnet,
wobei ein Luftspalt zwischen sie gefügt ist, und drehbar
gelagert. In diesem Ausführungsbeispiel ist der Motor 100 beispielhaft
als synchroner Drehstrommotor vom Oberflächendauermagnettyp
dargestellt.
-
Ein
Gestell umfasst einen zylindrischen Rahmen 101, eine erste
Klammer 102 und eine zweite Klammer 103, wobei
die Klammern 102 und 103 an beiden Enden entlang
der axialen Richtung des Rahmens 101 vorgesehen sind. Lager 106 und 107 sind
in den Hohlräumen der ersten bzw. zweiten Klammer 102 bzw. 103 vorgesehen.
Diese Lager halten drehbar eine Drehwelle 121.
-
Zwischen
dem Rahmen 100 und der ersten Klammer 102 ist
ein (nicht gezeigtes) Dichtungsmittel vorgesehen, das ein ringförmiger
O-Ring ist, der in der axialen und radialen Richtung zwischen dem
Rahmen 101 und der ersten Klammer 102 zusammengedrückt
wird. Auf diese Weise ist eine feste Dichtung zwischen dem Rahmen 101 und
der ersten Klammer 102 vorgesehen, so dass das Vorderende
des Motorgestells wasserdicht gemacht werden kann. In gleicher Weise
dichtet ein (nicht gezeigtes) Dichtungsmittel den Rahmen 101 und
die zweite Klammer 103 fest ab.
-
Der
Stator 110 umfasst den Statorkern 111 und die
Statorspule 112, die um den Statorkern gewickelt ist, und
ist auf der Innenfläche des Rahmens 101 angeordnet.
Der Statorkern 111 besteht aus magnetischem Material (Magnetpfad-Formungskörper),
die aus Silicium-Stahlblechen aufgebaut sind, die in axialer Richtung laminiert
sind. Der so zusammengesetzte Statorkern 111 besteht aus
einem ringförmigen Rückkern und mehreren Zähnen,
von denen jeder von der Innenfläche des ringförmigen
Rückkerns radial und nach innen absteht. Die Zähne
sind gleichmäßig voneinander in der Umfangsrichtung
beabstandet.
-
Wicklungsleiter,
die die Statorspule 112 bilden, sind um die jeweiligen
Zähne in der Art konzentrierten Wickelns gewickelt. Die
Wicklungsleiter bilden dreiphasige Wicklungen durch entsprechendes
Verbinden der Spulenenden mit Verbindungselementen, die nahe der
zweiten Klammer 103 positioniert sind. Die gut bekannten
beiden Arten der Verbindung von dreiphasigen Wicklungen sind die
Delta(Δ)-Verbindung und die Stern(Y)-Verbindung. In diesem
Ausführungsbeispiel wird die Delta(Δ)-Verbindung
verwendet.
-
Der
Rotor 120 umfasst einen Rotorkern, der fest auf der Außenumfangsfläche
der Drehwelle 121 angebracht ist, mehrere Magneten, die
fest auf der Außenfläche des Rotorkerns angeordnet
sind, und Magnetabdeckungen 122a und 122b, die
auf dem Außenumfang der Magnete angeordnet sind. Die Magnetabdeckungen 122 dienen
zur Verhinderung, dass die Magneten aufgrund der Zentrifugalkraft
von dem Rotorkern wegfliegen und sind daher aus nicht-magnetischem
Material hergestellt, wie etwa rostfreiem Stahl (als SUS bekannt),
und vom Aufbau her zylindrisch oder röhrenförmig
(es ist zu beachten, dass die Bezugszeichen 122, 122a und 122b in 5 nicht
gezeigt sind).
-
Nun
wird der Aufbau der Drehwinkel-Messeinheit 200 beschrieben.
-
Die
Drehwinkel-Messeinheit 200 besteht hauptsächlich
aus einem Magnetsensor 201 und einem Sensormagneten 202.
Die Drehwinkel-Messeinheit 200 befindet sich in dem Raum,
der von einem Gehäuse 203 und der zweiten Klammer 103 eingeschlossen
ist. Der Sensormagnet 202 ist an einem Ende der Drehwelle 121 der
Motoreinheit 100 angebracht, und wenn sich die Winkelposition
der Drehwelle 121 ändert, ändert sich die
Ausrichtung des von dem Sensormagneten 202 erzeugten Magnetfelds
entsprechend. Der Drehwinkel (d. h. die Winkelposition) der Drehwelle 121 kann
durch Erfassen der Ausrichtung des Magnetfelds mit dem Magnetsensor 201 gemessen
werden.
-
Der
Sensormagnet 202 kann ein zweipoliger Magnet sein, der
in zweipoliger Form magnetisiert ist, oder ein mehrpoliger Magnet,
der in mehrpoliger (mehr als vier Pole) Form magnetisiert ist.
-
Der
Magnetsensor 201 ist mit Magnetwiderstandselementen aufgebaut,
deren Ausgabe sich in Ansprechung auf die Ausrichtung des gemessenen
Magnetfelds ändert. Magnetwiderstandselemente beinhalten anisotrope
Magnetwiderstands(AMR)-Elemente, Riesenmagnetwiderstands(GMR)-Elemente
und Tunnel-Magnetwiderstands(TMR)-Elemente. In diesem Ausführungsbeispiel
werden Riesenmagnetwiderstands(GMR)-Elemente für den Magnetsensor 201 verwendet.
-
Der
Magnetsensor 201 erfasst die Ausrichtung θm des Magnetfelds an der Position, an der
sich der Sensor 201 befindet, auf der Grundlage des Bezugswinkels θm0, der dem Sensor 201 zugeteilt
ist. Der Sensor 201 gibt nämlich ein Signal aus,
das als θ = θm – θm0 ausgedrückt wird. Der in diesem
Ausführungsbeispiel verwendete Sensor 201 besteht
aus zwei GMR-Elementen und die GMR-Elemente liefern Ausgabesignale,
die proportional cos(θm – θm0) bzw. sin(θm – θm0) sind.
-
Der
Magnetsensor 201 ist fest an der zweiten Klammer 103 mittels
einer Sensorhaltekomponente 206 angebracht. Die Sensorhaltekomponente 206 ist
bevorzugt aus einem Material hergestellt, das eine magnetische Suszeptibilität
von höchstens 0,1 aufweist, wie etwa Aluminium oder Kunstharz,
um die Ausrichtung des nahe gelegenen Magnetfels nicht zu beeinflussen.
In diesem Ausführungsbeispiel wurde die Sensorhaltekomponente 206 aus
Aluminium hergestellt.
-
Es
genügt, dass der Magnetsensor 201 im Verhältnis
zur Motoreinheit 100 unbeweglich ist, und daher kann er
fest an einem anderen Strukturteil als der zweiten Klammer 103 angebracht
sein. Denn wenn er im Verhältnis zur Motoreinheit unbeweglich
ist, kann er den Drehwinkel der Drehwelle 121 durch Erfassen
der Ausrichtung des Magnetfelds an seiner Position im Raum erfassen,
wenn sich der Drehwinkel der Welle 121 ändert,
um die Ausrichtung des Sensormagneten 202 zu ändern.
-
Die
Sensorverdrahtung 208 ist mit dem Magnetsensor 201 verbunden.
Die Ausgabe des Sensors 201 wird über die Sensorverdrahtung 208 übertragen.
-
Der
Magnetsensor 201 besteht hauptsächlich aus einer
Sensorelementeinheit 201 und einer Erfassungsschaltungseinheit 302.
Die Sensorelementeinheit 301 beinhaltet mehrere GMR-Elemente,
die in einer Brückenkonfiguration verbunden sind. Die Erfassungsschaltungseinheit 302 besteht
hauptsächlich aus einer Treiberschaltungseinheit zum Zuführen
von Spannungen, die an die GMR-Elemente angelegt werden, und einer
Signalverarbeitungseinheit zum Erfassen und Verarbeiten der Ausgabesignale
der GMR-elemente.
-
Nun
wird der Aufbau der Sensorelementeinheit 301 beschrieben.
-
Wie
in 24 gezeigt, besteht die Sensorelementeinheit 301 aus
einem Paar Brückenkonfigurationen, die aus GMR-Elementen 51 bestehen.
Die Brückenkonfigurationen sind als COS-Brücke
bzw. SIN-Brücke bezeichnet. Die COS-Brücke und
SIN-Brücke unterscheiden sich voneinander in der Ausrichtung θp
der Magnetisierung in den verstifteten Magnetschichten der GMR-Elemente.
Für die COS-Brücke ist die Voreinstellung derart,
dass θp = 0° (R1 (51A-1) und R3 (51A-3))
und θp = 180° (R2 (51A-2) und R3 (51A-4)).
Wenn der Winkelursprung der Ausrichtung θ des Magnetfelds
so voreingestellt ist, dass θp =
0, wird dementsprechend die Ausgabesignalspannung ΔV =
V2 – V1 proportional
cos, wie vorstehend beschrieben.
-
[Ausdruck 6]
-
-
ΔVc =
V2 – V1 = –e0
G / 2R
cosθ (6)
-
Vorliegend
steht e0 für die Spannung, die
an die Anschlüsse e der in 24 gezeigten
Brücken angelegt ist und wird als die „Brückenanregungsspannung” bezeichnet.
Für die SIN-Brücke dagegen ist die Ausrichtung θp der Magnetisierung in den verstifteten
Magnetschichten so voreingestellt, dass θp =
90° (R1 (51B-1) und R3 (51B-3)) und θp = 270° (R2 (R1B-2)
und R3 (51B-4)). Wenn der Winkelursprung
der Ausrichtung θ des Magnetfelds so voreingestellt ist,
dass θp = 0, wird die Ausgabesignalspannung ΔV
= V2 – V1 dementsprechend proportional
sinθ.
-
[Ausdruck 7]
-
-
ΔVs =
V2 – V1 =
e0
G / 2R
sinθ (7)
-
Als
Ergebnis führt das Verhältnis der SIN-Brückenausgabe
zur COS-Brückenausgabe zu tanθ, so dass die Ausrichtung θ des
Magnetfelds so bestimmt wird, dass [Ausdruck
8]
-
Die
ArcTan-Funktion liefert ihre Ausgabe nur für den Winkelbereich
von –90°~+90°. Wenn jedoch die an ΔVs und ΔVc angebrachten
Vorzeichen entsprechend eingestellt werden, wie nachstehend beschrieben, kann
die Ausrichtung θ über den gesamten Winkelbereich
von 0~360° gemessen werden.
-
Nun
wird der Aufbau der Erfassungsschaltungseinheit 302 unter
Bezugnahme auf 25 beschrieben.
-
25 ist
ein Blockdiagramm des Aufbaus der Erfassungsschaltungseinheit 302,
die in diesem Ausführungsbeispiel verwendet wird. Die Erfassungsschaltungseinheit 302 besteht
hauptsächlich aus einer Treiberschaltungseinheit 340 und
einer Signalverarbeitungseinheit 350. Die Treiberschaltungseinheit 340 ist
eine Schaltung zum Zuführen von Anregungsspannungen zu
den Brücken, die in der Sensorelementeinheit 301 beinhaltet
sind. Eine Ausgabeeinheit 341 mit positiver Polarität
ist mit den Anschlüssen e der Brücken verbunden, während
eine Ausgabeeinheit 345 mit negativer Polarität
mit den Anschlüssen g der Brücken verbunden ist.
In diesem Ausführungsbeispiel ist die Ausgabeeinheit 341 mit
positiver Polarität so entworfen, dass sie eine Gleichspannung
von 5 V ausgibt, während die Ausgabeeinheit 345 mit
negativer Polarität so entworfen ist, dass sie die Erdungsspannung
ausgibt.
-
Es
wird hier bemerkt, dass die Ausgabeeinheit 345 mit negativer
Polarität im Vergleich mit der Erdungsspannung nicht unbedingt
eine negative Spannung liefert, obwohl der Ausgabeeinheit 345 mit
negativer Spannung der Zusatz „mit negativer Spannung” in
dem Sinn zugeteilt ist, dass sie eine negativere Spannung als die
Ausgabespannung der Ausgabeeinheit 341 mit positiver Spannung
ausgibt.
-
Während
der Zeitspanne, in der die GMR-Brücken nicht angeregt sind,
das heißt, während der Zeit, in der die der Feldausrichtung θm entsprechende Sensorausgabe nicht erhalten
wird, ist es nicht erforderlich, zu bestimmen, ob die Ausgabe der
Ausgabeeinheit mit negativer Polarität negativer oder positiver
als die Ausgabe der Ausgabeeinheit mit positiver Polarität
ist. Beispielsweise wird in einem nachstehend beschriebenen Ausführungsbeispiel
während der Zeitspanne, in der die Brücken von
GMR-Elementen nicht angeregt sind, die Ausgabespannung der Ausgabeeinheit
mit negativer Polarität gleich der Ausgabespannung der
Ausgabeeinheit mit positiver Polarität gemacht.
-
Die
Signalverarbeitungseinheit 350 erfasst und verarbeitet
das Ausgabesignal der Sensorelementeinheit 301. Die Signale
aus den Anschlüssen V2 und V1 der COS-Brücke der
Sensorelementeinheit 301 werden differenziell erfasst und
etwa 10-fach durch eine Erfassungsschaltung 351A verstärkt.
Ein A/D(Analog zu Digital)-Wandler 352A wandelt das verstärkte
Signal in ein digitales Signal um, das dann in eine Winkelberechnungseinheit 371 eingegeben
wird. Das Ausgabesignal der SIN-Brücke wird in ähnlicher
Weise verarbeitet und in die Winkelberechnungseinheit 371 eingegeben.
-
Der
Berechnungsvorgang der Winkelberechnungseinheit 371 wird
nachstehend beschrieben. Wie aus Ausdruck 8 zu verstehen ist, kann
die Feldausrichtung θm durch Berechnen
von ArcTan[ΔVs/(–ΔVc)] ermittelt werden. Dabei treten jedoch
zwei Probleme auf: (a) erstens, da die ArcTan-Funktion nur für
den Winkelbereich von –90°~+90° ausgewertet
werden kann, kann die Feldausrichtung nicht über den gesamten
Winkelbereich von 0~360° gemessen werden, und (b) zweitens,
da die Abnahme des Absolutwerts von ΔVc zu
der Zunahme des Einflusses durch die Messungenauigkeit von ΔVc führt, wird die Berechungsgenauigkeit
von θ schlecht.
-
Um
das vorstehende Problem (b) zu bewältigen, ermittelt die
Winkelberechnungseinheit
371 θ auf die folgende
Weise. Zuerst wird bestimmt, ob der Absolutwert von ΔV
c größer als der Absolutwert
von ΔV
s ist oder nicht. Wenn |ΔV
c| größer als |ΔV
s| ist, wird die Feldausrichtung θ durch
den folgenden Ausdruck (9) berechnet. [Ausdruck
9]
-
Umgekehrt
wird, wenn |ΔV
c| kleiner als |ΔV
s| ist, die Feldausrichtung θ durch
den folgenden Ausdruck (10) berechnet. [Ausdruck
10]
-
Auf
diese Weise kann verhindert werden, dass eine Berechnungsungenauigkeit,
die sich daraus ergibt, dass der Nenner kleiner wird, groß wird.
-
Das
obige Problem (a) wird wie folgt gehandhabt. Der Quadrant, in den θ fällt,
wird in Abhängigkeit davon bestimmt, ob ΔVc oder ΔVs einen
negativen oder positiven Wert annimmt [Quadrantbestimmung]. Die Kombination
des bestimmten Quadranten mit den von den Ausdrücken (9)
und (10) berechneten Werten ermöglicht es, den genauen
Wert von θ über den gesamten Bereich von 0~360° zu
berechnen.
-
Durch
den vorstehend beschriebenen Ablauf wird die Ausrichtung θ des
Magnetfelds ermittelt. Wie jedoch später beschrieben wird,
fallen der Drehwinkel der Drehwelle 121 und die Magnetfeldausrichtung
(oder der Winkel) nicht unbedingt zusammen. Um in dieser Beschreibung
nachfolgend streng zwischen ihnen zu unterscheiden, wird die Ausrichtung
(oder der Winkel) des Magnetfelds als „Magnetfeldwinkel θm” bezeichnet, während
der Drehwinkel der Drehwelle 121 als „Drehwinkel θr” bezeichnet wird.
-
Wie
später beschrieben wird, ist es mit einem Drehwinkel-Messgerät
im Wesentlichen wichtig, zwischen dem Magnetfeldwinkel θm und dem Rotorwinkel θr zu
unterscheiden.
-
Um
ein Drehwinkel-Messgerät mit hoher Genauigkeit zu realisieren,
ist es notwendig, zu veranlassen, dass der Magnetfeldwinkel θm dem Rotorwinkel θr exakt
entspricht. Wie dies geschieht, wird nachstehend beschrieben.
-
Nun
wird das Verfahren zum Korrigieren des Ausgabesignals des Magnetsensors 201 beschrieben.
-
Die
Größe des Magnetsensors 201, der Magnetwiderstandselemente
verwendet, ist kleiner als diejenige eines Drehmelders und liegt
typischerweise im Bereich von 5 mm2. Dementsprechend
tritt das Problem auf, dass, da die Größe des
Magnetsensors klein ist, eine Anbringungsungenauigkeit die Winkelungenauigkeit verstärkt.
Nachstehend erfolgt eine konkrete Beschreibung.
-
Unter
Bezugnahme auf
6 sei angenommen, dass in dem
Fall, dass ein Magnetsensor mit einer Länge L [mm] angebracht
wird, die Betragsungenauigkeit in der Richtung, die senkrecht zu
der Richtung entlang der Länge L ist, als δx [mm]
bezeichnet wird. In der folgenden Diskussion kann die Allgemeingültigkeit aufrechterhalten
werden, wenn der Bezugswinkel θ
m0 in
der Richtung der Länge L liegt. Als Ergebnis kann die Ungenauigkeit δθ im
Anbringungswinkel aufgrund der Anbringungsungenauigkeit δx
durch den folgenden Ausdruck gegeben werden. [Ausdruck
11]
-
Daher
geschieht es, dass eine Ungenauigkeit δθm in dem Drehwinkel enthalten ist, der von
dem Magnetfeldwinkel-Messgerät angegeben wird.
-
Typischerweise
beträgt die Anbringungsungenauigkeit δx, die für
den Magnetsensor mechanisch zu verursachen ist, 0,2 mm. Wenn die
Länge L des Magnetsensors gleich 100 mm ist, wird die entsprechende Winkelungenauigkeit δθm 0,1°. Dieser Wert fällt
in einen tolerierbaren Ungenauigkeitsbereich. Andererseits wird
im Fall von L = 5 mm die entsprechende Winkelungenauigkeit δθm 2,3°. Dieses Ergebnis zeigt an,
dass das im Gebrauch befindliche Magnetfeldwinkel-Messgerät
von schlechter Genauigkeit ist.
-
Es
ist möglich, dass die Modullänge L eines Magnetsensors 201 so
lange wie etwa 100 mm gemacht wird, um den tolerierbaren Bereich
der Anbringungsungenauigkeit zu erhöhen. Selbst in einem
solchen Fall wird jedoch eine Anbringungsungenauigkeit, die der
oben genannten δx entspricht, im Verlauf des Anbringens der
Magnetwiderstandselementbrücke 55 in dem Modul
und in den Vorgängen des Drahtbondens und Formens verursacht.
Da die Größe der Magnetwiderstandselementbrücke 44 im
Modul noch kleiner ist, wird der Einfluss durch die Winkelungenauigkeit
aufgrund von δx dementsprechend größer.
-
Weiterhin
besteht noch das Problem, dass die Erhöhung der Größe
des Moduls in der Tat insofern vorteilhaft ist, dass die Toleranz
der Anbringungsungenauigkeit erhöht werden kann, aber nicht
zu dem Vorzug führt, dass der mit Magnetwiderstandselementen
gebaute Magnetsensor von kleiner Größe und leichtem
Gewicht sein kann.
-
Der
Winkel θm des von dem Sensormagneten 202 erzeugten
Magnetfelds fällt nicht unbedingt mit dem Drehwinkel θr der Drehwelle 121 zusammen. Die
Gründe dafür fallen in drei nachstehend angegebene
Kategorien: (1) der Ursprung (Nullpunkt) des Magnetfeldwinkels θm fällt nicht mit dem Ursprung des
Drehwinkels θ der Drehwelle 121 zusammen; (2)
das von dem Sensormagneten 202 erzeugte Magnetfeld verteilt
sich nicht parallel; und (3) der Sensormagnet 202 ist nicht
genau magnetisiert.
-
Der
erste Grund, dass (1) der Ursprung (Nullpunkt) des Magnetfeldwinkels θm nicht mit dem Ursprung des Drehwinkels θ der
Drehwelle 121 zusammenfällt, kann den Ungenauigkeiten
zugeschrieben werden, die beim Anbringen des Magnetsensors entstehen,
und den mechanischen Ungenauigkeiten, die beim Anbringen des Sensormagneten 202 an
der Drehwelle 121 verursacht werden. Das Verfahren, um
diese beiden Ursprünge in Übereinstimmung zu bringen,
wird später beschrieben. Vorliegend wird ein Fall betrachtet,
in dem die Ursprünge für θm und θr miteinander übereinstimmen.
-
In
einem Fall, in dem (2) der Sensormagnet 202 ein paralleles
Magnetfeld erzeugt, fällt der Magnetfeldwinkel θm mit dem Drehwinkel θr der
Drehwelle zusammen. Jedoch weicht in einem Fall, in dem der Sensormagnet
kein paralleles Magnetfeld erzeugt, θm von θr ab. Diese Situation ist unter Bezugnahme
auf 7 beschrieben. 7 ist eine
bildliche Darstellung des Magnetfeldwinkels am Punkt P, der sich
in der Nähe des Sensormagneten 202 befindet und
an dem sich der Magnetfeldsensor 201 befindet. Wenn nun
der Sensormagnet ein paralleles Magnetfeld erzeugt, ist der Magnetfeldwinkel
am Punkt P wie durch einen gepunkteten Pfeil 511 angegeben,
wenn der Sensormagnet 202 durch einen Winkel θr rotiert. Dementsprechend wird der Magnetfeldwinkel θm gleich dem Drehwinkel θr des Sensormagneten 202. Wenn andererseits
der Sensormagnet kein paralleles Magnetfeld erzeugt, weicht der
Magnetfeldwinkel θm am Punkt P
von dem Drehwinkel θr ab, wie durch
einen ausgezogenen Pfeil 512 angegeben. Diese Abweichung
wird als die Differenz δ so definiert, dass δ = θ – θr.
-
Im
Allgemeinen ist ein Magnetfeld, das aus einem Magneten in der radialen
Richtung austritt, kein paralleles Feld. Wie beispielsweise in
JP-A-2008-151774 offenbart
ist, sind die radiale Komponente H
r und
die tangentiale Komponente H
θ des
in der Ebene der Drehung des Magneten gemessenen Magnetfeldintensitätsvektors
jeweils durch die folgenden Ausdrücke dargestellt:
-
[Ausdruck 12]
-
-
Hr(θ)
= C(A1cosθ + A3cos3θ +
A5cosθ + ...) (12)
-
[Ausdruck 13]
-
-
Hθ(θ)
= A1sinθ + A3sin3θ +
A5sin5θ + ... (13)
-
Dabei
ist C eine Konstante, die ungefähr 1~2 gleich ist. In einem
Fall, in dem die Harmoniekomponenten A3 und
A5 beide gleich Null sind, d. h. A3 = A5 = 0, und in
dem C = 1 ist, ist Hr = A1cosθ und
Hθ = A1sinθ,
was die Bedingung für ein paralleles Magnetfeld ergibt.
In einem solchen Fall fällt der Magnetfeldwinkel θm mit dem Drehwinkel θr der
Drehwelle zusammen.
-
Vorliegend
ist die Differenz δ des Magnetfeldwinkels θm von dem Drehwinkel θr der
Drehwelle durch den folgenden Ausdruck definiert:
-
[Ausdruck 14]
-
-
8 zeigt
grafisch die Beziehung zwischen der Differenz δ des Magnetfeldwinkels θm von dem Rotorwinkel θr und
dem Rotorwinkel θr, wobei sowohl θm als auch θr unter
Verwendung der obigen Ausdrücke (12) und (13) berechnet
werden, wenn A1 = 1, A3 = –0,12,
A5 = 0,014 und C = 1,268. Mit dieser Bedingung
beträgt die Differenz δ ungefähr ±15° und
diese Werte werden als relativ groß betrachtet. Des Weiteren ändert
sich die Differenz δ in Abhängigkeit von dem Rotorwinkel θr und es versteht sich, dass eine Korrektur
nicht durch ein einfaches Verfahren erreicht werden kann, wie etwa
zum Beispiel lineare Interpolation zwischen 0° und 360°.
-
9 zeigt
schematisch die Verteilung des Magnetfeldwinkels in der Nähe
des Sensormagneten 202, die auf der Grundlage der Verteilung
der in 8 gezeigten Differenzen aufgebaut ist. Somit wird
die Verteilung der in 8 gezeigten Differenzen der
Tatsache zugeschrieben, dass das Magnetfeld am Umfang des Sensormagneten
divergiert. Ebenso wird die Tatsache, dass die Differenz δ bei θr = 0°, 90°, 180° und
270° auf Null reduziert wird, der Symmetrie des Magnetfelds
zugeschrieben, wie aus 9 ersichtlich ist.
-
Wenn
eine Magnetisierungsungenauigkeit beim Magnetisieren des Sensormagneten
vorliegt, wird die Entsprechung des Drehwinkels θr der Drehwelle zum Magnetfeldwinkel θm ungenau.
-
[Verfahren zum Korrigieren eines Drehwinkel-Messgeräts]
-
Wie
unter Bezug auf die obigen Gründe (1)~(3) beschrieben ist,
muss das Magnetfeld-Messgerät, das Magnetwiderstandselemente
verwendet, eine solche physikalische Größe wie
den Magnetfeldwinkel θm handhaben,
und die physikalische Größe θm unterscheidet sich vom Drehwinkel θr des Sensormagneten. Es ist daher wichtig
zu erkennen, dass eine Differenz zwischen ihnen in Abhängigkeit
von einer bestimmten Bedingung auftreten kann. In dieser Beschreibung
ist diese Differenz als δ definiert.
-
Mit
anderen Worten, solange der Magnetsensor 201 korrekt bleibt,
wird er den Magnetfeldwinkel θm korrekt
messen. Daher ist es wesentlich, (a) den Magnetfeldsensor 201 zu
korrigieren und (b) die Entsprechung des Magnetfeldwinkels θm mit dem Drehwinkel θr des
Sensormagneten korrekt zu ermitteln.
-
Ein
konkreter Ablauf zum Bereitstellen der vorstehend beschriebenen
Korrekturen wird nachstehend beschrieben.
-
Zuerst
ist, was (a) das korrekte Korrigieren des Magnetsensors betrifft,
eine Versatzkorrektur konkret wichtig. Es ist hier zu beachten,
dass es zwei Arten des Versatzes gibt: eine ist der Versatz für
den Magnetsensor, der den Abweichungen der Eigenschaften der den
Magnetsensor 201 bildenden Magnetwiderstandselemente zugeschrieben
wird; und die andere ist der Versatz für die Erfassungsschaltung,
die das Ausgabesignal des Magnetsensors erfasst und verarbeitet.
-
In
beiden Versatzabläufen wird die Versatzmenge dem Ausgabesignal
des Magnetsensors überlagert. Dementsprechend wird das
Verhältnis der SIN-Brückenausgabe zur COS-Brückenausgabe
nicht gleich tanθ sein. Als Ergebnis kann der Magnetfeldwinkel θm nicht korrekt gemessen werden.
-
Ein
konkreter Ablauf zum Korrigieren des Versatzes ist die Einstellung
der Versetzung der SIN-Brückenausgabe auf Null bei θm = 0 und die Einstellung des Versatzes der
COS-Brückenausgabe auf Null bei θm =
90°.
-
Für
diese Einstellung muss man den Ursprung für den Magnetfeldwinkel θm kennen. Jedoch ist es unmöglich,
den Ursprung aufgrund der Anbringungsungenauigkeit des Magnetsensors 201 oder
der Anbringungs-/Herstellungsungenauigkeit des Sensormagneten 202 präzise
zu lokalisieren, selbst wenn die Entsprechung des Magnetfeldwinkels θm zum Drehwinkel θr der
Drehwelle im Entwurfsstadium gut bekannt ist.
-
In
diesem Ausführungsbeispiel wird der Ursprung für
den Magnetfeldwinkel durch ein nachstehend beschriebenes Verfahren
ermittelt. Das Verfahren ist als Flussdiagramm in 10 aufgeschlüsselt.
-
Zu
Beginn wird der Ursprung für den Drehwinkel θr der Drehwelle 121 an einer beliebigen
Position lokalisiert. Dann sei der von dem willkürlich
lokalisierten Ursprung gemessene Drehwinkel als θr' dargestellt.
-
Als
Nächstes wird die Drehwelle 121 N-mal mit konstanter
Geschwindigkeit gedreht. Hier ist N ≥ 1. Während
sich die Welle dreht, wird die Beziehung zwischen dem Drehwinkel θr' und dem Magnetfeldwinkel θm gemessen. Hier wird der Wert für
den Magnetfeldwinkel θm aus dem
Ausgabesignal des Magnetsensors 201 berechnet. Der Wert
für den Drehwinkel θr wird
durch die tatsächliche Messung des Zeitmoments t berechnet. Der
Weg der Messung wird später detailliert beschrieben.
-
Um
die Beziehung zwischen θr' und θm über die N Drehungen der Welle
zu kennen, muss man die Startposition der Drehung und die Endposition
der Drehung kennen. Die Messung des Magnetfeldwinkels θm wird verwendet, um diese Information zu
erfahren. Es genügt nämlich, dass die Messung
fortgesetzt wird, bis ein Wert von θm,
der der gleiche wie der Wert von θm ist,
der am Beginn der Messung angenommen wurde, zuerst erreicht wird.
Es ist zu beachten, dass, damit die Messung über N Drehungen
durchgeführt wird, sie wiederholt werden sollte, bis der
gleiche Wert für θm N-mal
erscheint.
-
Nach
der Messung der Beziehung zwischen θr'
und θm wird die Differenz δ'
durch den folgenden Ausdruck berechnet.
-
[Ausdruck 15]
-
-
Auf
diese Weise kann die Differenz δ' als Funktion des Drehwinkels θr' ermittelt werden. 11A zeigt diese
Funktionsbeziehung grafisch.
-
Was
die Anzahl der Messdatenpunkte (δ', θr')
betrifft, so genügt es, etwa einhundert von ihnen zu nehmen.
-
Als
Nächstes wird das gewichtete Mittel von δ' in
Bezug auf θ
r' wie folgt ermittelt. [Ausdruck
16]
-
Da
die tatsächlichen Messdaten (δ', θr') von diskreter Art sind, wird die integrale
Berechnung durch den Ausdruck (16) tatsächlich durch kumulatives
Zählen ersetzt.
-
Bei
dieser Datenabtastung wird die Drehwelle mit konstanter Geschwindigkeit
gedreht und wenn Daten (δ', θ
r')
in einem regelmäßigen Zeitabstand abgetastet werden,
sind daher die Abtastpunkte in Bezug auf θ
r'
gleich beabstandet. Daher kann der Ausdruck (16) als eine Formel
zum Berechnen des Mittels von δ' wie folgt vereinfacht
werden. [Ausdruck
17]
-
Daher
ist es bevorzugt, die Drehwelle mit konstanter Geschwindigkeit zu
drehen und die Datenpunkte (δ', θr')
in regelmäßigem Zeitabstand abzutasten.
-
Nun
wird unter Verwendung der Werte von δ'av, die durch
den Ausdruck (16) oder (17) ermittelt wurden, der Koordinatenpunkt
des Drehwinkels wie folgt neu definiert.
-
[Ausdruck 18]
-
-
[Ausdruck 19]
-
-
Mit
dieser Definition ist die Beziehung zwischen δ und θr wie in 11B gezeigt.
Das gewichtete Mittel von δ verschwindet nämlich.
Dies ist aus den Ausdrücken (6) und (7) ersichtlich.
-
Auf
diese Weise fällt, wenn das gewichtete Mittel der Differenz δ Null
ist, der Ursprung für θr mit
dem Ursprung für θm zusammen.
Dieses Ergebnis liegt an der Symmetrie der Magnetfeldverteilung,
wie in 9 gezeigt.
-
Nun
wird die Drehwelle an einem Drehwinkel θr = θm = 0 angehalten und eine Versatzeinstellung
wird auf eine solche Weise vorgenommen, dass das Ausgabesignal der
SIN-Brücke im Magnetsensor 201 verschwindet. Dann
wird die Drehwelle an einem Drehwinkel θr =
90° angehalten, und eine Versatzeinstellung wird auf eine
solche Weise vorgenommen, dass das Ausgabesignal der COS-Brücke
im Magnetsensor verschwindet.
-
Auf
diese Weise wird die Versatzeinstellung des Magnetsensors 201 beendet.
-
Wie
aus der vorstehenden Beschreibung ersichtlich, ist es wichtig, δ'av so
genau wie möglich zu ermitteln, um zu bewirken, dass sich
die Differenz zwischen dem Ursprung für θm und dem Ursprung für θr Null annähert. Gemäß diesem
Verfahren wird, da der Wert von δ'av unter Verwendung
aller Messdatenpunkte ermittelt wird, wie aus dem Ausdruck (6) oder
(7) ersichtlich, der berechnete Wert kaum durch einzelne Messungenauigkeiten
und Rauschen beim Messen beeinträchtigt. Somit können
die beiden Ursprünge miteinander beinahe in Übereinstimmung
gebracht werden.
-
Da
die Zunahme bei der Drehanzahl N der Drehwelle zur Zunahme der Anzahl
von Messdatenpunkten führt, wird der Einfluss von Messungenauigkeiten
und Rauschen reduziert, um die Genauigkeit zu verbessern.
-
Als
Nächstes wird nachstehend ein Verfahren zum (b) korrekten
Ermitteln der Beziehung zwischen dem Magnetfeldwinkel θm und dem Drehwinkel θr des
Sensormagneten 202 beschrieben.
-
Da
die Versatzeinstellung des Magnetsensors 201 gemäß dem
Verfahren, das vorstehend als (a) genannt wurde, beendet worden
ist, gibt der aus dem Ausgabesignal des Magnetsensors 201 ermittelte
Magnetfeldwinkel θm die Ausrichtung
des Magnetfelds an der Position, wo sich der Magnetsensor 201 befindet,
korrekt an. Dementsprechend kann der Drehwinkel θr auf der Grundlage der durch den Ausdruck
(14) definierten Differenz δ und des Magnetfeldwinkels θm unter Verwendung des folgenden Ausdrucks
ermittelt werden.
-
[Ausdruck 20]
-
-
Nachstehend
wird nun ein konkretes Verfahren beschrieben.
-
Während
die Drehwelle 121 durch 360 Grad oder mehr bei konstanter
Geschwindigkeit gedreht wird, werden der Drehwinkel θr und der Magnetfeldwinkel θm während dieser Eine-Umdrehung-Zeitspanne
gemessen. Vorliegend wird der Drehwinkel θr auf
der Grundlage der Zeit gemessen, während der Magnetfeldwinkel θm auf der Grundlage des Ausgabesignals der
Magnetsensoren 201 berechnet wird.
-
In
diesem Ausführungsbeispiel werden 100 Messdatenpunkte (d.
h. Abtastpunkte) für eine Umdrehung der Welle genommen.
Je größer die Anzahl der Abtastpunkte, desto höher
ist die Genauigkeit des ermittelten Drehwinkels θr. Andererseits wird, je größer
die Anzahl der Abtastpunkte ist, der Speicherbereich in der Signalverarbeitungsschaltung,
die Berechnungen zur Korrektur ausführt, desto mehr verbraucht.
Daher sollte die Anzahl von Abtastpunkten auf einen geeigneten Wert
eingestellt werden, um einen Kompromiss zwischen Genauigkeit und
Speicherbelegung zu schaffen.
-
Die
Differenz δ kann als Funktion des Rotorwinkels θr durch Berechnen jeweiliger Differenzen δ'
an einzelnen Datenpunkten (θr, θm) unter Verwendung des Ausdrucks (19) ermittelt
werden. 12A zeigt dieses ermittelte
Ergebnis. Dann wird δ in eine Funktion des Magnetfeldwinkels θm auf der Grundlage der so erhaltenen Daten
umgewandelt. 12B zeigt die Funktion. Auf
diese Weise wird die Nachschlagetabelle für δ mit dem
Magnetfeldwinkel θm als Index erhalten.
-
Durch
Erhalten der Nachschlagetabelle für δ mit dem
Magnetfeldwinkel θm als Index wird
es infolgedessen möglich, die Differenzen δ' entsprechend
den Magnetfeldwinkeln θm' zu berechnen,
die aus tatsächlich gemessenen Datenpunkten berechnet sind.
Dies ist der Hauptpunkt dieses Ausführungsbeispiels.
-
Die
Nachschlagetabelle wird im Speicher der Signalverarbeitungseinheit
in dem Magnetsensor 201 abgespeichert/beibehalten. Somit
ist der Korrekturvorgang abgeschlossen.
-
Es
folgt nun eine Beschreibung eines Verfahrens zum Verarbeiten von
Signalen, wenn die Drehwinkel-Messeinheit arbeitet, das heißt,
wenn der Drehwinkel gemessen wird.
-
Zu
Beginn wird ein Magnetfeldwinkel θ
m auf
der Grundlage des Ausgabesignals des Magnetsensors
201 berechnet.
Der Magnetsensor liefert nämlich ein Signal V
cos,
das proportional –cosθ
m ist,
und ein Signal V
sin, das proportional sinθ
m ist, und daher wird θ
m durch
den folgenden Ausdruck berechnet. [Ausdruck
21]
-
Dann
wird die Differenz δ, die dem berechneten θm entspricht, in Bezug auf die Nachschlagetabelle der
Koordinaten (δ, θm) ermittelt.
Wenn ein Wert gleich θm in der
Nachschlagetabelle nicht gefunden werden kann, wird der erforderliche
Wert von θm durch Interpolation
aus nahen Werten ermittelt. Die Differenz δ, die dem interpolierten θm entspricht, wird so ermittelt. In diesem
Ausführungsbeispiel wird der Linearinterpolationsablauf
beim Interpolieren der Werte für θm eingesetzt.
Der Linearinterpolationsablauf erfordert eine geringere Wiederholungsanzahl
von Multiplikationen, die eine erhebliche Zeit für die
Berechnung erfordern, und hat daher den Vorteil, dass eine Hochgeschwindigkeitsberechnung
möglich ist.
-
Der
Drehwinkel θr wird durch den Ausdruck θr = θm – δ erhalten.
-
Während
die konventionellen Verfahren eine Messungenauigkeit von ungefähr ±10° beim
elektrischen Winkel erlitten haben, kann das Verfahren gemäß dieser
Erfindung eine solche Messungenauigkeit auf ±0,6° beim
elektrischen Winkel senken, was eine Verbesserung der Messgenauigkeit
bewirkt.
-
Es
sollte in diesem Ausführungsbeispiel bemerkt werden, dass
der Index in der Nachschlagetabelle nicht der Rotorwinkel θr, sondern der Magnetfeldwinkel θm ist. Der Grund dafür ist, dass
der Magnetfeldwinkel θm genau die
Größe ist, die von dem Magnetsensor 201 gemessen
wird. Dementsprechend kann die entsprechende Differenz δ direkt
aus dem tatsächlichen Messwert θm erfahren
werden.
-
Die
Nachschlagetabelle der Koordinaten (δ, θm), in der θm'
in einem konstanten Intervall abgetastet werden, ermöglicht
es, die Geschwindigkeit des Abrufens der Daten aus der Tabelle zu
erhöhen und die Kapazität des Speichers, die der
Tabelle gewidmet ist, zu verringern. Wie dies erreicht wird, wird
nachstehend konkret beschrieben. In der folgenden Beschreibung ist
der Index θm in der Tabelle als
unabhängige Variable „x” beschrieben
und der Wert (d. h. der Wert der Funktion) δ, auf den in
der Tabelle Bezug genommen wird, ist mit „f(x)” bezeichnet.
-
Es
sei angenommen, dass x
min = x[0] und x
max = x[N
max], worin
x
min und x
max jeweils
der Minimal- und der Maximalwert der unabhängigen Variable
x sind, und dass das Intervall zwischen jenen Werten gleichmäßig
in N
max Unterintervalle unterteilt ist.
Auch sei die Funktion, die die diskrete Version von f(x) ist, durch
fn[n] bezeichnet, und es ist definiert, dass f(x) = f(x[n]) = fn[n].
Dann wird für einen beliebigen Wert der unabhängigen
Variablen x ix durch den folgenden Ausdruck berechnet. [Ausdruck
22]
-
Wenn
der integre Teil und der Dezimalteil des erhaltenen Werts ix mit
n bzw. r bezeichnet ist, folgt daraus, dass:
-
[Ausdruck 23]
-
-
f(x) = fn[n] + r·(fn[n
+ 1] – fn[n]) (23)
-
Dieser
Ausdruck dient zur Interpolation mit einer linearen Funktion (d.
h. lineare Interpolation) unter Verwendung von fn[n] und fn[n +
1], die aus der Nachschlagetabelle ermittelt wird und die jeweils
x[n] und x[n + 1] entspricht, die dem Wert der unabhängigen
Variable x am nächsten sind.
-
Die
Werte von „Nmax/(xmax – xmin)” im Ausdruck (22) werden vorab
berechnet, wenn die Nachschlagetabelle eingerichtet wird, das heißt,
wenn eine Korrektur vorgenommen wird, und die vorab berechneten
Werte werden dann als Konstanten im Speicher der Verarbeitungseinheit
gespeichert. Dadurch kann ein Teilungsvorgang in dem Vorgang eliminiert
werden, der beim Betrieb des Drehwinkel-Messgeräts stattfindet.
Eine Mikrosteuerung benötigt normalerweise eine lange Zeit
für einen Teilungsvorgang und daher kann dieses Verfahren, das
den Teilungsvorgang beseitigt, den Betrieb des Drehwinkel-Messgeräts
sehr beschleunigen.
-
Gemäß diesem
Verfahren kann weiterhin, da die Stelle, die einem zugeteilten Wert
von x entspricht, auf die in der Nachschlagetabelle Bezug zu nehmen
ist, durch eine einzige Berechnung mit dem Ausdruck (22) spezifiziert
werden kann, der Betrieb des Drehwinkel-Messgerät stark
beschleunigt werden.
-
Da
gemäß diesem Verfahren nur Daten, die in der Nachschlagetabelle
gespeichert sind, fn[n] (n = 0~Nmax), xmin, xmax und Nmax/(xmax – xmin) sind und da Daten x[n] ((n = 0~Nmax)
nicht gespeichert werden müssen, kann der Speicher zum
Speichern von Daten eingespart werden.
-
Nun
wird das Verfahren zum Ermitteln des Drehwinkels θr der Drehwelle 121 nachstehend
beschrieben.
-
13 ist
eine rechteckige Koordinatendarstellung der Beziehung zwischen der
Messzeit t und dem Drehwinkel θr der
Drehwelle 121, die beobachtet wird, während sich
die Drehwelle 121 mit einer konstanten Drehzahl ω dreht.
Da die Drehwelle 121 sich mit einer konstanten Drehgeschwindigkeit ω dreht,
ist θr proportional t.
-
Wie
aus 13 ersichtlich, kann der Drehwinkel θr(t) zu jeder Messzeit t durch den folgenden
Ausdruck gegeben werden.
-
[Ausdruck 24]
-
- θr(t)
= t / T
·360° (24) worin
T für die Zeit steht, die erforderlich ist, damit die Drehwelle 121 eine
Umdrehung ausführt (d. h. eine Zeitspanne). Die Zeitspanne
T kann durch Bestimmen der zwei aufeinander folgenden Zeitpunkte
ermittelt werden (wobei der frühere der Startpunkt der Drehung
ist, d. h. t = 0), an welchen Zeitpunkten der Magnetsensor 201 den
gleichen Wert für den Magnetfeldwinkel θm erfasst.
-
Wenn
sich die Drehwelle 121 mit konstanter Drehzahl ω dreht,
kann der Drehwinkel θr durch Bezugnahme
auf den Ausdruck (24) erfahren werden. Es ist hier zu beachten,
dass keine zusätzliche Korrektureinheit, wie etwa ein Kodierer,
zum Bestimmen des Drehwinkels θr benötigt
wird.
-
Sowohl
in 13 als auch im Ausdruck (24) wird der Drehwinkel θr zum Zeitpunkt t = 0 auf Null gesetzt. Es
ist jedoch offensichtlich, dass, selbst wenn der Drehwinkel bei
t = 0 irgendein anderer Wert als Null ist, der Wert des Drehwinkels θr gleichermaßen ermittelbar ist,
wenn auch der Ursprung für den Drehwinkel θr in einem bestimmten Maß versetzt
wird. Der Ursprung für θr kann
mit demjenigen für θm gemäß dem
vorstehend beschriebenen Verfahren in Übereinstimmung gebracht
werden.
-
Nun
wird ein Fall betrachtet, in dem sich die Drehzahl im Lauf der Zeit
mit einer bekannten Geschwindigkeit ändert. Unter der Annahme,
dass die Änderungsrate A(t) der Drehzahl ω im
Lauf der Zeit variabel ist, sei angenommen, dass ω(t) = ω
0·A(t) ist. In diesem Fall kann
der Drehwinkel θ
r(t) zum Zeitpunkt
t durch den folgenden Ausdruck berechnet werden. [Ausdruck
25]
-
Beispielweise
kann in einem Fall, in dem sich die Drehzahl mit konstanter Beschleunigung
oder mit einer bekannten Geschwindigkeit (mit enthaltenen Welligkeiten) ändert,
der Drehwinkel θr zum Zeitpunkt
t durch Verwenden des Ausdrucks (25) ermittelt werden.
-
Gemäß diesem
Ausführungsbeispiel wird die Differenz δ unter
Verwendung des Magnetfeldwinkels θm, der
tatsächlich von dem Magnetsensor 201 gemessen
worden ist, aus der Nachschlagetabelle ermittelt und dann wird der
Drehwinkel θr ermittelt. Es ist
daher notwendig, dass ein Magnetfeldwinkel θm die
entsprechende Differenz δ eindeutig bestimmt.
-
In
dem Fall, in dem der Sensormagnet 202 ein zweipoliger Magnet
ist, ist diese Forderung erfüllt. Der zweipolige Magnet
ist ein Magnet mit einem N-Pol und einem S-Pol. Da mit dem zweipoligen
Magneten eine Umdrehung der Drehwelle 121 eine Änderungszeitspanne
im Magnetfeldwinkel θm verursacht,
wird die obige Forderung erfüllt.
-
Gemäß dieser
Erfindung kann daher, wenn ein zweipoliger Magnet als Sensormagnet
verwendet wird, ein großer Vorteil genutzt werden, da Faktoren
für irgendeine Art von Ungenauigkeit, wie etwa eine Anbringungsungenauigkeit
des Magneten und Sensors oder eine Magnetisierungsungenauigkeit
des Magneten, korrigiert werden kann.
-
Nun
erfolgt eine Beschreibung eines Falls, in dem ein mehrpoliger Magnet
als Sensormagnet eingesetzt wird. Es sei angenommen, dass der mehrpolige
Magnet ein (2N)-Pol-Magnet mit N Sätzen von N-Polen und
S-Polen ist. In diesem Fall führt eine Umdrehung des (2N)-Pol-Magnets
zur Änderung des Magnetfeldwinkels über N Zeitspannen.
Dabei soll jede Zeitspanne als ein Sektor bezeichnet werden. Dementsprechend kann
man sagen, dass der (2N)-Pol-Magnet N Sektoren abdeckt.
-
Im
Bereich von einem Sektor wird die einem Magnetfeldwinkel θm entsprechende Differenz δ eindeutig bestimmt.
Dementsprechend ist, wenn ein (2N)-Pol-Magnet verwendet wird und
wenn Magnetisierungsungenauigkeiten in verschiedenen Sektoren innerhalb
eines vernachlässigbar kleinen Bereich fallen, das Korrekturverfahren
gemäß dieser Erfindung wirksam.
-
Weiterhin
wird auch in dem Fall, in dem der funktionsfähige Bereich
der Drehwelle 121 kleiner als ein Sektor ist, δ eindeutig
aus θm bestimmt. Daher ist auch
in diesem Fall das Korrekturverfahren gemäß dieser Erfindung
wirksam.
-
In
dem Fall, in dem ein mehrpoliger Magnet verwendet wird, dessen Magnetisierungsungenauigkeiten in
verschiedenen Sektoren nicht vernachlässigbar sind, wird
ein Drehpositionssensor, wie etwa ein optischer Kodierer, an der
Drehwelle 121 angebracht, um Sektorinformation zum Lokalisieren
des aktuellen Sektors zu erhalten. Die einem Magnetfeldwinkel θm entsprechende Differenz δ kann
auf der Basis der Sektorinformation ermittelt werden. Eine Winkelauflösung,
die für den hier verwendeten Drehpositionssensor erforderlich
ist, ist so, dass sie gut genug ist, wenn der Sensor nur den aktuellen
Sensor lokalisieren muss.
-
Da
der aktuelle Sektor aus dem Versatzbetrag des Drehwinkels berechnet
werden kann, kann die Information über den aktuellen Sektor
auch in der Erfassungsschaltungseinheit 302 gespeichert
werden. Die Differenz δ kann aus der Information über
den aktuellen Sektor und den tatsächlich gemessenen Magnetfeldwinkel θm berechnet werden. Ein solcher Kunstgriff
kann vorzugsweise ersonnen werden, um einen spezifischen Sektor
magnetisch durch Ändern der Magnetfeldverteilung zu diskriminieren,
indem beispielsweise eine mechanische Kerbe in einem der mehreren
Pole des Magnetsensors 201 vorgesehen wird.
-
Beispielsweise
ist in
JP-3799270 ein
Verfahren zum Messen der gegenseitigen Beziehung zwischen dem Drehwinkel
der Drehwelle und dem Ausgabewert des Magnetsensors und zur Korrekturvornahme
mittels der Beziehung offenbart, wobei das Verfahren in einem Drehwinkel-Messgerät
angewendet wird, das Magnetwiderstandselemente verwendet.
-
Jedoch
wird gemäß diesem konventionellen Beispiel eine
Korrektur durch Ausdrücken der Beziehung zwischen dem Drehwinkel
der Drehwelle und der Ausgabespannung des Magnetwiderstandselements
durch einen Näherungsausdruck durchgeführt. In
diesem Fall muss der Näherungsausdruck komplex sein, wenn
die Beziehung zwischen dem Drehwinkel der Drehwelle und der Ausgabespannung
des Magnetwiderstandselements komplex wird, das heißt,
wenn die Beziehung zwischen δ und θm (nachstehend
als „δθm”-Verteilung” bezeichnet),
wie in den 12A und 12B gezeigt,
eine komplexe Form annimmt. Dementsprechend entsteht das Problem,
dass die zur Korrekturberechnung erforderliche Betriebszeit zunimmt.
Beim vorliegenden Ausführungsbeispiel dagegen kann eine
Korrekturberechnung durch lineare Interpolation mittels zwei nächstliegenden
Datenpunkten umgesetzt werden, selbst wenn die δθm-Verteilung eine komplexe Form annimmt.
Daher kann die Betriebszeit für die Korrektur verkürzt
werden.
-
Im
Fall des Ausdrückens der Beziehung durch einen Näherungsausdruck,
wenn die δθm-Verteilung eine
komplexe Form annimmt, neigt der Näherungsausdruck dazu,
eine relativ große Ungenauigkeit zu bewirken. Dieses Ausführungsbeispiel
kann die δ-θm-Verteilung
bewältigen, ungeachtet dessen, welche Form sie annimmt.
-
Bei
dieser Erfindung kann ein einfaches Verfahren zum Korrigieren der
Magnetfeldverteilung zusätzlich verwendet werden. Es wird
nämlich ein korrigierter Winkel θadj,
der durch einen Korrigiervorgang behandelt worden ist, für
den Magnetfeldwinkel θm in dem
Schritt des Zusammenstellens der Nachschlagetabelle eingesetzt;
die Differenz δ wird mittels des folgenden Ausdrucks berechnet:
-
[Ausdruck 26]
-
- δ = θadj – θr
(26) ; und eine überarbeitete
Nachschlagetabelle wird durch Auflisten der Beziehung zwischen δ und θadf (mit θadf als
Index) zusammengestellt. Wenn die Messung erfolgt, wird der korrigierte
Winkel θadf aus dem von dem Magnetsensor 201 gemessenen
Magnetfeldwinkel θ berechnet, und danach wird ein korrekter
Rotorwinkel θr mittels des Ausdrucks θr = θadf – δ erhalten.
-
Da
die Differenz δ mittels des korrigierten Winkels θadj anstelle des Magnetfeldwinkels klein θm gemacht wird, verbessert sich die Genauigkeit
bei der Korrektur. Weiterhin wird die Abhängigkeit vom
Winkel der Differenz δ durch die Verwendung des korrigierten
Winkels klein, so dass die Genauigkeit bei der Berechnung der Werte
für die Differenz δ durch Interpolation verbessert
wird, wodurch eine genaue Korrektur mit weniger Datenpunkten erfolgen
kann. Dementsprechend wird die Anzahl von in der Nachschlagetabelle
verwendeten Datenpunkten geringer und daher wird eine Korrektur
mit weniger Speicherkapazität möglich.
-
Gemäß dem
in
JP-3799270 offenbarten
Verfahren ist es notwendig, den Drehwinkel der Drehwelle an einem
vorgegebenen Wert in der Messung der Beziehung zwischen dem Drehwinkel
der Drehwelle und der Ausgabespannung des Magnetwiderstandselements
einzustellen. Dementsprechend muss zusätzlich ein Drehkodierer
verwendet werden, um eine Messung zur Korrektur durchzuführen.
Dagegen besteht gemäß dieser Erfindung kein Bedarf
an einem zusätzlichen Kodierer, um eine solche Korrektur
zu bewirken, wie vorstehend beschrieben.
-
Es
werden nun Einzelheiten beschrieben, wie in ein System in ein Drehwinkel-Messgerät
eingebaut wird, das wie vorstehend beschrieben hergestellt ist.
In diesem Ausführungsbeispiel ist ein Fall beispielhaft dargestellt,
in dem ein Drehwinkel-Messgerät in einer elektrischen Servolenkungsvorrichtung
eingebaut ist.
-
14 zeigt
schematisch ein elektrisches Servolenkungssystem.
-
Nach
dem anfänglichen Einstellen des Systems auf den Winkelursprung
und Systemursprung wird der Drehwinkel θr0 der
Drehwelle 121 ausgelesen. Konkret gesagt, wird der Drehwinkel θr der Drehwelle 121 durch Ermitteln
des Magnetfeldwinkels θm durch
Messung mit dem Messsensor 201 und anschließendes
Nachschlagen der Differenz δ in der Nachschlagetabelle
ermittelt. Dann wird der dem Systemursprung entsprechende Drehwinkel θr0 in der Steuereinheit (elektronische Steuereinheit
ECU) des elektrischen Servolenkungssystems gespeichert.
-
Selbst
wenn es eine Anbringungsungenauigkeit beim Anbringen des Drehwinkel-Messgeräts
im System gibt, kann die Anbringungsungenauigkeit korrigiert werden,
wenn der Wert für den Drehwinkel θr0,
der dem Systemursprung entspricht, bekannt ist.
-
Die
normalerweise von einem System, wie etwa einem Servolenkungssystem,
erforderliche Information ist ein Systemwinkel θsys. Gemäß diesem Ausführungsbeispiel
kann ein solcher Systemwinkel θsys auf
der Grundlage des Magnetfeldwinkels θm,
der aus dem Ausgabesignal des Magnetsensors 201 ermittelt
wird, exakt ermittelt werden.
-
Das
zweite Ausführungsbeispiel dieser Erfindung wird unter
Bezugnahme auf 26 und 27 beschrieben.
Dieses Ausführungsbeispiel betrifft ein Verfahren zum Verbessern
der Temperatureigenschaft des Magnetsensors 201 in großem
Ausmaß.
-
Drehwinkelsensoren
leiden unter dem Problem, dass eine Temperaturänderung
eine Verschlechterung der Messgenauigkeit verursacht. Dies ist das
Problem einer schlechten Temperatureigenschaft. Gemäß diesem
Ausführungsbeispiel wird die Temperatureigenschaft des
Magnetsensors 201 durch Verbessern des Magnetfeldwinkel-Messverfahrens,
das bei dem Magnetsensor 201 verwendet wird, verbessert.
-
Die
Ursache für die Verschlechterung der Temperatureigenschaft
in dem Magnetwiderstandselement liegt in der Überlagerung
von Versetzungs- bzw. Offsetspannungen auf die Ausgabesignale der
Sensorelementeinheit 301, die in dem Magnetsensor 201 eingebaut
ist. Dieser Punkt ist nachstehend detailliert beschrieben. Da sich
der GMR-Koeffizient G/R im Ausdruck (6) mit der Temperatur ändert, ändert
sich der Wert von ΔVc mit der Temperaturänderung.
Wie jedoch aus den Ausdrücken (6), (7) und (8) ersichtlich
ist, wird die Änderung im Koeffizienten G/R in Abhängigkeit
von der Temperatur versetzt, da der Magnetfeldwinkel θm aus dem Verhältnis von ΔVs zu ΔVc berechnet
wird. Dementsprechend ist von einem idealen Standpunkt aus der Wert für θ,
der aus dem tatsächlich gemessenen Wert berechnet wird,
nicht in Abhängigkeit von der Temperatur zu ändern.
-
Jedoch
werden Offsetspannungen ΔVs und ΔVc in der tatsächlichen Brücke,
die GMR-Elemente verwendet, überlagert, wie in den folgenden
Ausdrücken (27) angegeben.
-
[Ausdruck 27]
-
-
ΔVc =
V2 – V1 = –e0
G / 2R
cosθ + ΔVc(ofs) (27)
-
ΔVs = V2 – V1 =
e0
G / 2R
sinθ + ΔVs(ofs)
-
Als
Ergebnis ist das Verhältnis ΔVs/ΔVc nicht gleich tanθ, und selbst
wenn das Verhältnis ΔVs/ΔVc erhalten wird, heben die GMR-Koeffizienten
G/R des Zählers und Nenners einander nicht auf, so dass
sich der Magnetfeldwinkel θm mit
der Temperatur ändert.
-
Selbst
wenn eine Versatzeinstellung bei Raumtemperaturen in einer Erfassungsschaltung 351A erfolgt,
das heißt, selbst wenn die Offsetspannung ΔVc(ofs) eliminiert wird, um einen korrekten
Magnetfeldwinkel θm zu erhalten,
bewirkt eine Temperaturänderung dementsprechend immer noch
eine Änderung des Versatzwerts, so dass kein korrekter
Wert für den Magnetfeldwinkel θm erhalten
werden kann. Dies ist der Grund für die Verschlechterung
der vorstehend genannten Temperatureigenschaft.
-
Der
Grund, dass eine Offsetspannung in der Signalspannung ΔVc(ofs) erzeugt wird, liegt daran, dass die
elektrischen Widerstände der vier die Brücke bildenden
Elemente nicht demselben Wert bei θ = 90° (d.
h. cosθ = 0) gleich gemacht sind, da die Eigenschaften
der Elemente voneinander variieren.
-
26 zeigt
schematisch den Aufbau einer Brücke, die in dem Magnetsensor 201 eingebaut
ist, der in diesem Ausführungsbeispiel verwendet wird.
-
In
diesem Ausführungsbeispiel umfasst die COS-Brücke
in der Sensorelementeinheit 301, die den Magnetsensor 201 bildet,
vier GMR-Elemente 51-1, 51-2, 51-3 und 51-4. 26 zeigt
die elektrischen Verbindungen zwischen diesen Elementen. Die (in 26 nicht
gezeigte) SIN-Brücke weist ebenfalls eine ähnliche Struktur
auf. Dieses Ausführungsbeispiel wird nachstehend unter
Bezug auf die COS-Brücke beschrieben.
-
Die
aus den GMR-Elementen 51-1 und 51-4 bestehende
Halbbrücke ist mit einer Ausgabeeinheit e1 (341)
mit positiver Polarität und einer Ausgabeeinheit g1 (345) mit negativer Polarität
verbunden. Der Verbindungspunkt zwischen den GMR-Elementen 51-1 und 51-4 wird
als Signalanschluss V1 verwendet.
-
Die
aus den GMR-Elementen 51-2 und 51-3 bestehende
Halbbrücke ist mit einer Ausgabeeinheit e2 (342)
mit positiver Polarität und einer Ausgabeeinheit g2 (346) mit negativer Polarität
verbunden. Der Verbindungspunkt zwischen den GMR-Elementen 51-2 und 51-3 wird
als Signalanschluss V2 verwendet.
-
Die
Signalanschlüsse V1 und V2 sind mit einer Erfassungsschaltung 351 verbunden,
die eine Differenzspannung Δ = V2 – V1 erfasst, das heißt, die Differenz
zwischen den Spannungen an den Anschlüssen V1 und V2.
-
Das
Merkmal dieses Ausführungsbeispiel besteht darin, dass
die aus vier GMR-Elementen bestehende Brücke in zwei Halbbrücken
geteilt wird und die beiden Halbbrücken von unterschiedlichen
Spannungen e1 bzw. e2 betätigt
werden. Mit dieser Schaltungskonfiguration wird es möglich,
Offsetspannungen wie nachstehend beschrieben zu eliminieren.
-
Wie
in 26 gezeigt, sind die GMR-Elemente 51-1, 51-2, 51-3 und 51-4 so
bezeichnet, dass sie Widerstandswerte R1 bzw.
R2 bzw. R3 bzw.
R4 aufweisen.
-
Es
sei angenommen, dass die Magnetisierungsrichtungen der verstifteten
Magnetschichten 13 in den GMR-Elementen R1 (51-1)
und R3 (51-3) durch θp = 0 gegeben sind und dass die Magnetisierungsrichtungen der
verstifteten Magnetschichten 13 in den GMR-Elementen R2 (51-2) und R4 (51-4)
durch θp = 180° gegeben sind. Da die Magnetisierungsrichtung θf der freien Magnetschicht in Abhängigkeit
von dem externen Magnetfeld bestimmt wird, weisen die vier GMR-Elemente
in ihren freien Magnetschichten die gleiche Magnetisierungsrichtung
auf. Es gilt daher, dass Δθf2 = θf – θp2 = θf – θp1 – π = Δθ1 + π. Es gilt auch, dass Δθ1 = θ, da Δθ1 in Bezug auf θp =
0 gemessen wird. Dementsprechend gilt, wie aus dem Ausdruck (1)
ersichtlich, der Ausdruck (2) für R1 und
R3 (n = 1, 3), während der Ausdruck
(3) für R2 und R4 (n
= 2, 4) gilt.
-
Die
Differenzspannung ΔV (= V
2 – V
1) zwischen den Anschlüssen 1 und
2 der Brückenschaltung in
26 ist
durch den folgenden Ausdruck gegeben. [Ausdruck
28]
-
Die
vorstehende Überlegung wird auf einen solchen allgemeinen
Fall erstreckt, in dem andere Elemente als GMR-Elemente verwendet
werden, wie nachstehend beschrieben. Es wird ein Fall betrachtet,
in dem sich R1 und R3,
die ein gegenüberliegendes Widerstandspaar in der Brücke
bilden, wie folgt ändern (n = 1, 3):
-
[Ausdruck 29]
-
-
Es
wird auch ein anderer Fall betrachtet, in dem sich R2 und
R4, die das andere gegenüberliegende Widerstandspaar
in der Brücke bilden, wie folgt ändern (n = 2,
4).
-
[Ausdruck 30]
-
-
Wenn
ein konkreter Fall betrachtet wird, in dem GMR-Elemente verwendet
werden, entspricht der Wert, der ermittelt wird, wenn der Magnetfeldwinkel θ gleich
90° ist, Rn0. Dies ist durch Vergleich
der Ausdrücke (2) und (3) mit den Ausdrücken (29)
und (30) klar ersichtlich.
-
Wenn ΔR
= 0, wird die Differenzspannung ΔV (= V
2 – V
1) zwischen den Anschlüssen 1 und
2 der Brücke in
26 aus
Ausdruck (28) berechnet, wie nachstehend angegeben. [Ausdruck
31]
-
Da
dieser Wert für ΔR = 0 berechnet wird, ist er
als „ΔV
0” definiert.
Dann wird ein ähnlicher Wert für ΔR ≠ 0
ermittelt. [Ausdruck
32]
[Ausdruck
33]
-
Der
Zähler des ersten Terms im Ausdruck (32) ist der gleiche
wie der entsprechende Zähler im Ausdruck (31). Wenn angenommen
wird, dass ΔV0 = 0, ergibt dementsprechend
der Ausdruck (32) die folgende Proportionalitätsbeziehung.
-
[Ausdruck 34]
-
-
Vorliegend
ist der Proportionalitätsfaktor C das, was durch den Ausdruck
(33) gegeben ist.
-
Wenn
der durch den Ausdruck (31) gegebene ΔV0 durch
Einstellen der Spannungsdifferenz (e2 – e1) gleich Null gemacht wird, wird die Signalspannung ΔV
der in 26 gezeigten Brücke
von der Offsetspannung befreit. Als Ergebnis kann eine gewünschte
Eigenschaft realisiert werden, dass ΔV proportional der
variablen Größe ΔR ist.
-
Der
Hauptpunkt dieses Ausführungsbeispiel ist es, imstande
zu sein, die Anregungsspannungen e1 und
e2, die an die beiden Halbbrückenpaare
angelegt werden, getrennt einzustellen. Um diesen Punkt klar zu machen,
wird der Unterschied dieses Ausführungsbeispiels zu den
konventionellen Beispielen nachstehend erläutert.
-
Im
Fall einer in 4 gezeigten konventionellen
Brückenkonfiguration wird, da die vier GMR-Elemente ungleiche
Eigenschaften haben, die Gleichung R1R3 = R2R4 nicht
erfüllt, selbst wenn θ = 90°, so dass
der Zähler in dem Ausdruck (4) nicht verschwindet. Denn
die Offsetspannung bleibt in der Signalspannung ΔV erhalten.
Vom Standpunkt des Ausdrucks (31) verschwinden, wenn e1 =
e2, der erste und zweite Term im Ausdruck (31)
zusammen im Fall einer idealen Brücke, für die
die Gleichung R1R3 =
R2R4 erfüllt
ist. Jedoch verschwindet in einem Fall, in dem die Gleichung R1R3 = R2R4 aufgrund der ungleichen Eigenschaften der
GMR-Elemente nicht erfüllt ist, der erste Term im Ausdruck
(31) nicht, so dass eine Offsetspannung erzeugt wird. Gemäß diesem
Ausführungsbeispiel, kann ΔV0 dagegen,
wie aus dem Ausdruck (31) ersichtlich, bei θ = 90° auf
Null gestellt werden, indem die Spannungsdifferenz (e2 – e1) eingestellt wird. Als Ergebnis kann die
Offsetspannung eliminiert werden, wie vorstehend beschrieben.
-
Nun
werden Temperatureigenschaften unter Bezug auf die Sensorelementenbrücke,
wie in 26 gezeigt, betrachtet.
-
Die
Temperatureigenschaft des Widerstands einer Substanz kann durch
den folgenden Ausdruck dargestellt werden.
-
[Ausdruck 35]
-
-
R(T) = R(T0)[1
+ a(T + T0)] = R(T0)(1
+ aΔT) (35)
-
Die
Einsetzung des Ausdrucks (35) in den Zähler des ersten
Terms des Ausdrucks (32) und die Neuordnung des Ausdrucks (32) ergeben
(1 + aΔT) als Multiplikationsfaktor. Wenn daher ΔV0 bei einer bestimmten Temperatur gleich
Null gemacht wird, folgt daraus, dass ΔV0 =
0 bei irgendeiner anderen Temperatur ist.
-
Gemäß diesem
Ausführungsbeispiel ist nämlich, wenn die Spannungsdifferenz
(e2 – e1)
so eingestellt ist, dass ΔV0 =
0 bei einer bestimmten Temperatur ist, zum Beispiel bei einer Raumtemperatur, ΔV0 = 0 bei irgendeiner anderen Temperatur.
Dies bedeutet, dass die durch den Ausdruck (34) gegebene Proportionalitätsbeziehung
erhalten wird.
-
Somit
kann ein von der Offsetspannung freies Signal über einen
breiten Temperaturbereich erhalten werden.
-
Gemäß diesem
Ausführungsbeispiel kann auf diese Weise die Anzahl der
Schritte des Prüfungs-/Einstellungsablaufs um ein großes
Ausmaß gesenkt werden, da die Temperatureigenschaft eines
Magnetfeld-Messgeräts nach der Herstellung bei einer bestimmten
Temperatur allein, zum Beispiel bei einer Raumtemperatur, eingestellt
werden kann.
-
Als
Nächstes wird ein Magnetfeld-Messgerät, das GMR-Elemente
verwendet, betrachtet. R1 und R2 werden
gemäß dem Ausdruck (2) wie folgt dargestellt:
-
[Ausdruck 36]
-
-
Rn =
Rn0 – G / 2
cosθ (36)
-
Im
Vergleich mit dem Ausdruck (29) wird das Differenzspannungssignal
im Fall der Verwendung von GMR-Elementen durch den folgenden Ausdruck
bezeichnet.
-
[Ausdruck 37]
-
-
Es
kann nämlich ein Signal erhalten werden, das proportional
zum Kosinus der Magnetfeldausrichtung θ ist. Das so erhaltene
Signal wird mit ΔVc bezeichnet.
-
Die
Konstante C ist der Wert, der aus dem Ausdruck (33) ermittelt wird.
-
In
dem Drehwinkel-Messgerät gemäß diesem
Ausführungsbeispiel ist der Aufbau der Motoreinheit 100 der
gleiche wie derjenige im Ausführungsbeispiel 1. Obwohl
der Aufbau der Drehwinkel-Messeinheit 200 der gleiche wie
derjenige im Ausführungsbeispiel 1 ist, wird der Aufbau
des Magnetsensors 201 durch den vorstehend beschriebenen
Aufbau ersetzt. Das Korrekturverfahren, das bewirkt, dass der Drehwinkel θr mit dem Magnetfeldwinkel θm übereinstimmt, der von dem Magnetsensor 201 gemessen
wird, ist das gleiche wie dasjenige, das im Ausführungsbeispiel
1 angewendet wird.
-
Gemäß diesem
Ausführungsbeispiel kann die Temperatureigenschaft verbessert
werden; die genaue Messung des Rotorwinkels kann aufgrund der Korrektur
des Magnetfelds bewirkt werden; und daher kann ein Drehwinkel-Messgerät
mit hoher Präzision über einen breiten Temperaturbereich
hinweg realisiert werden.
-
Gemäß diesem
Ausführungsbeispiel kann, da die Messung des Rotorwinkels über
einen breiten Temperaturbereich hinweg einfach durch Einstellen
der Vorspannung (Δe = e1 – e2) für die Erfassungsschaltungseinheit 302 des
Magnetsensors 201 bei Raumtemperatur durchgeführt
werden kann, ein kostengünstiges Drehwinkel-Messgerät
bereitgestellt werden, das eine kleine Anzahl von Schritten zur
Korrektur und Einstellung erfordert.
-
Als
Nächstes wird das dritte Ausführungsbeispiel dieser
Erfindung beschrieben, in dem eine Offsetspannung reduziert werden
kann, die der Schaltungskonfiguration der Erfassungsschaltungseinheit 302 zugeschrieben
werden kann. Bei dem Drehwinkel-Messgerät dieses Ausführungsbeispiels
ist der Aufbau einer Motoreinheit 100 der gleiche wie derjenige,
der bei Ausführungsbeispiel 1 beschrieben ist, und der
Aufbau einer Drehwinkel-Messeinheit 200 ist der gleiche
wie derjenige, der bei Ausführungsbeispiel 2 beschrieben
ist.
-
Dieses
Ausführungsbeispiel wird unter Bezugnahme auf 27 detailliert
beschrieben.
-
Gemäß diesem
Ausführungsbeispiel wird das Magnetfeld genau erfasst,
indem eine Offsetspannung eliminiert wird, die einer Erfassungsschaltung
zugeschrieben werden kann.
-
27 zeigt
Wellenformen der Anregungsspannungen, die an die Halbbrücken
angelegt werden, die aus GMR-Elementen bestehen, wie in 26 gezeigt.
Hier sind die an die Anschlüsse e1 und
e2 in 26 angelegten
Anregungsspannungswellenformen mit Ve(1) bzw.
Ve(2) bezeichnet und die an die Anschlüsse
g1 und g2 in 26 angelegten
Anregungsspannungswellenformen sind mit Vg(1)
bzw. Vg(2) bezeichnet. Das entsprechende
Differenzspannungssignal ΔV = V2 – V1 ist ebenfalls in 27 gezeigt.
-
Zum
Zeitpunkt t1 wird eine Referenzspannung
Vag an beide Anschlüsse Ve(i) und Vg(i) (i
= 1, 2) angelegt. Dementsprechend werden der Anschluss e1 mit positiver Polarität und der
Anschluss g1 mit negativer Polarität
der Brücke beide auf der gleichen Spannung Vag gehalten
und daher erzeugen beide Anschlüsse V1 und V2 die Signalspannung Vag,
so dass das Differenzspannungssignal ΔV = V2 – V1 auf Null reduziert wird.
-
Infolgedessen
ist der spontane Wert Vdet(t1)
zum Zeitpunkt t1 der Ausgangsspannung Vdet(t) der Erfassungsspannung 351 die
Offsetspannung, die der Erfassungsschaltung 351 zugeschrieben
werden kann. Zum Zeitpunkt t2 liefert die
Ausgabeeinheit 341 mit positiver Polarität einen
Impuls 611 mit positiver Polarität und die Ausgabeeinheit 345 mit
negativer Polarität liefert einen Impuls 612 mit
negativer Polarität. Als Ergebnis wird das Differenzspannungssignal ΔV
= V2 – V1 eine
Signalspannung, die dem Magnetfeldwinkel entspricht.
-
Das
Differenzsignal ΔVdet = Vdet(t2) – Vdet(t1), das zwischen
den Zeitpunkten t1 und t2 berechnet
wird, wird zu einer Signalspannung, die frei von der Offsetspannung
ist, die der Erfassungsschaltung 351 zugeschrieben werden
kann. Auf diese Weise wird die Offsetspannung, die der Erfassungsschaltung
zugeschrieben werden kann, eliminiert, so dass das Magnetfeld genau
gemessen werden kann.
-
In
gleicher Weise ist das Differenzsignal ΔVdet =
Vdet(t4) – Vdet(t3) eine Signalspannung
zum Zeitpunkt t4.
-
Gemäß diesem
Ausführungsbeispiel besteht auf diese Weise der wesentliche
Punkt darin, die vier Anschlüsse e1,
e2, g1 und g2 der Brücke der 26 auf
dem gleichen Potenzial (Vag in 27)
zu halten und eine Referenzspannung von diesem Potenzial zu subtrahieren,
wobei die Referenzspannung die Ausgabespannung Vsig(t1) der Erfassungsschaltung zu diesem Zeitpunkt
ist. Dieser Vorgang ermöglicht es, die Offsetspannung,
die den GMR-Elementen zugeschrieben werden kann, von der Offsetspannung
perfekt zu trennen, die der Erfassungsschaltung zugeschrieben werden
kann.
-
Weiterhin
wird gemäß diesem Ausführungsbeispiel
zuerst das Referenzsignal Vdet(t1) gemessen, dann wird die Signalspannung
Vdet(t2) zum Anregen
der GMR-Elemente ermittelt und schließlich wird die Signalspannung ΔVdet = Vdet(t2) – Vdet(t1) ermittelt. Diese Verfahrensreihenfolge
minimiert die Zeitverzögerung zwischen dem Ausgangssignal
zur Zeit der Signalmessung (d. h. Abtastung) und dem Ausgangssignal
nach der Signalverarbeitung. Diese Gestaltung ist insbesondere bei
einer Anwendung bei einer Magnetfelderfassungsschaltung wichtig,
die für die Messung von beispielsweise dem Drehwinkel einer
Motorwelle verwendet werden kann, welche Hochgeschwindigkeitsreaktionen
erfordert.
-
In
diesem Ausführungsbeispiel werden die GMR-Elemente für
eine Stromführung nur während der Zeitspanne angeregt,
wenn der Impuls 611 mit positiver Polarität und
der Impuls 612 mit negativer Polarität zugeführt
werden. Dementsprechend kann ein Magnetfeld-Messgerät mit
niedrigem elektrischem Stromverbrauch realisiert werden. Konkret
gesagt, wenn die relative Einschaltdauer während der Spannungsanlegung auf
10% eingestellt ist, wird die verbrauchte elektrische Leistung auf
ein Zehntel gesenkt.
-
Da
die in den GMR-Elementen verbrauchte elektrische Leistung gesenkt
werden kann, kann gemäß diesem Ausführungsbeispiel
die Wärmeerzeugung (Joule-Wärme) durch die GMR-Elemente
verringert werden und daher kann der Vorteil genutzt werden, dass
die Änderung der Eigenschaften der GMR-Elemente aufgrund
des Temperaturanstiegs unterdrückt werden kann.
-
Weiterhin
sind gemäß diesem Ausführungsbeispiel
die Spannungsamplituden des Impulses 611 mit positiver
Polarität und des Impulses 612 mit negativer Polarität
einander fast gleich eingestellt. Dadurch ändern sich zur
Zeit der Nullpunkterfassung (bei t1) und
zur Zeit der Signalerfassung (t2) die Werte
der Signalspannungen V1 und V2 nicht
groß. Daher genießt man den Vorteil, dass die
Anforderung des Gleichtaktunterdrückungsverhältnisses
CMRR für den Differenzialdetektor 351 weniger
streng sein kann.
-
Nun
wird das vierte Ausführungsbeispiel dieser Erfindung unter
Bezugnahme auf 28 und 29 beschrieben.
Dieses Ausführungsbeispiel weist die gleiche Gestaltung
wie das vorstehend beschriebene zweite Ausführungsbeispiel
auf, hat aber den Aufbau des Magnetsensors 201, der wie
nachstehend beschrieben modifiziert ist.
-
28 zeigt
den Aufbau der Sensorelementeinheit 301 in dem in diesem
Ausführungsbeispiel verwendeten Magnetsensor 201. 29 zeigt
grafisch die Wellenformen von Anregungsspannungen und der Erfassungszeitsteuerung,
die in diesem Ausführungsbeispiel verwendet werden.
-
Wie
in 28 gezeigt, wird gemäß diesem
Ausführungsbeispiel die Anzahl von Verdrahtungsleitern, die
zwischen der Sensorelementeinheit 301 und der Erfassungsschaltungseinheit 302 verbinden,
durch Reduzieren der Anzahl von Anschlüssen verkleinert,
die aus der Sensorelementeinheit 301 kommen. Wie in 28 gezeigt,
sind die Anschlüsse g von Halbbrücken, die jeweils
aus GMR-Elementen bestehen, miteinander verbunden, wohingegen der
Anschluss e2 der COS-Brücke und
der Anschluss e2 der SIN-Brücke
miteinander verbunden sind.
-
Wie
vorstehend beschrieben, erzeugen die ungleichen Eigenschaften der
GMR-Elemente eine Signaloffsetspannung, die die Verschlechterung
von Temperatureigenschaften des Magnetsensors 201 verursacht. Dementsprechend
ist jener optimale Wert der Vorspannung Δe = e2 – e2 für die COS-Brücke, die
die Offsetspannung zu Null macht, nicht gleich dem entsprechenden
optimalen Wert der SIN-Brücke.
-
Daher
wird gemäß diesem Ausführungsbeispiel
die Anlegung der Anregungsspannung an die COS-Brücke im
Lauf der Zeit von der Anlegung der Anregungsspannung an die SIN-Brücke
verschoben, so dass Verdrahtungsleiter zwischen den Brücken
geteilt werden können und dass die Anzahl von Anschlüssen, die
aus der Sensorelementeinheit 301 kommen, verringert werden
kann.
-
29 zeigt
grafisch die Wellenformen von Anregungsspannungen und der Erfassungszeitsteuerung, die
in diesem Ausführungsbeispiel verwendet werden, und entspricht 27,
die dem dritten Ausführungsbeispiel dieser Erfindung zugeordnet
ist. Der Impuls 621 mit positiver Polarität für
die COS-Brücke und der Impuls 622 mit positiver
Polarität für die SIN-Brücke werden nacheinander
mit einer bestimmten Zeitversetzung angelegt. Der Impuls 612 mit
negativer Polarität wird an den Anschluss g angelegt.
-
Als
Ergebnis dieser versetzten Anlegung von Impulsen ändern
sich die Signalspannung ΔVc für
die COS-Brücke und die Signalspannung ΔVs für die SIN-Brücke, wie
in 29 gezeigt. Das Nullpunktsignal Vz wird
zur Zeit t0 gemessen. Dann werden die Signale
für die COS-Brücke und die SIN-Brücke
zur Zeit t1 bzw. t2 ermittelt.
-
Da
das Signal unter der Bedingung gemessen wird, dass die optimalen
Anregungsspannungen ΔV an die COS- bzw. SIN-Brücke
angelegt werden, kann dann auf diese Weise die Versatzkomponente,
die andernfalls in der Signalspannung enthalten sein kann, eliminiert
werden. Demgemäß kann, wie in dem zweiten Ausführungsbeispiel
beschrieben, ein Magnetsensor 201 mit einer gewünschten
Temperatureigenschaft erhalten werden.
-
Obwohl
der Aufbau der Sensorelementeinheit 301 wie in 28 gezeigt
gemäß diesem Ausführungsbeispiel ist,
ist er nicht verpflichtend, sondern ein reines Beispiel. Es muss
nicht gesagt werden, dass Fachleute auf dem Gebiet das Konzept dieses
Ausführungsbeispiels auf einen Fall, in dem die Anschlüsse
e und/oder die Anschlüsse g zwischen Brücken geteilt
werden, oder irgendeinen anderen machbaren Fall anwenden können.
-
Nun
wird das fünfte Ausführungsbeispiel dieser Erfindung
unter Bezugnahme auf 1 beschrieben.
-
In
diesem Ausführungsbeispiel ist ein Magnetsensor auf der
Außenfläche des Gestells eines Drehwinkel-Messgeräts
angebracht. Mit diesem Aufbau kann der Magnetsensor leicht angebracht
werden. Da es nicht notwendig ist, die Verdrahtungsleiter für
den Magnetsensor vom Inneren des Gestells des Drehwinkel-Messgeräts
herauszuführen, kann weiterhin die Montage und Herstellung
eines Drehwinkel-Messgeräts insbesondere für einen
wasserdichten Aufbau vereinfacht werden.
-
Das
Drehwinkel-Messgerät dieses Ausführungsbeispiels
besteht hauptsächlich aus einer Motoreinheit 100 und
einer Drehwinkel-Messeinheit 200. Der Aufbau der Motoreinheit 100 ist
der gleiche wie bei der Motoreinheit des ersten Ausführungsbeispiels.
-
Die
Drehwinkel-Messeinheit 200 umfasst einen an einer Drehwelle 121 angebrachten
Sensormagneten 202, ein an dem Gestell einer Motoreinheit 100 angebrachtes
Gehäuse 203 und einen Magnetsensor 201.
-
In
diesem Ausführungsbeispiel weist die Drehwinkel-Messeinheit
einen wasserdichten Aufbau auf. Dementsprechend ist ein Dichtungsmittel 210 zwischen
das Gehäuse 203 und die zweite Klammer 103 eingefügt.
Dadurch können das Gehäuse 203, die zweite
Klammer 103, der Rahmen 101 und die erste Klammer 102 zusammen
einen wasserdichten Aufbau bereitstellen. In dieser Patentbeschreibung
ist eine solche Grenze, die das Eindringen von Wasser von außen
verhindert, als „wasserdichte Grenze” bezeichnet.
-
Durch
Einfügen von Dichtungsmitteln zwischen Elemente, die eine
wasserdichte Grenze bilden, wird ein solcher Aufbau bereitgestellt,
der das Eindringen von Wasser in einen Raum verhindern kann, der
von den Elementen begrenzt wird. Daher muss in einem Fall, in dem
Verdrahtungsleiter durch die wasserdichte Grenze gezogen werden
müssen, ein mit Harz geformter Verbinder als die wasserdichte
Grenze dienen, so dass eine elektrische Verbindung zwischen dem
Inneren und dem Äußeren der Grenze durch Verbinden
von Verdrahtungsleitern mit dem Verbinder bereitgestellt werden
kann.
-
Der
Magnetsensor 201 ist auf der Außenfläche
des Gehäuses 203 angebracht. Da in diesem Ausführungsbeispiel
der Magnetsensor 201 außerhalb der wasserdichten
Grenze angeordnet ist, befinden sich auch die Führungsdrähte 208 für
die Signalübertragung von dem Magnetsensor 201 außerhalb
der wasserdichten Grenze, so dass sie nicht durch die wasserdichte
Grenze hindurchgehen müssen. Dementsprechend genießt man
den Vorteil, dass die Signalführungsdrähte 208 von
einfachem Aufbau sein können.
-
Da
sich das Gehäuse 203 zwischen dem Sensormagneten 202 und
dem Magnetsensor 201 befindet, müssen Material
und Form des Gehäuses 203 eine bestimmte Bedingung
erfüllen.
-
Für
das Gehäuse 203 sollte ein Material verwendet
werden, das eine magnetische Suszeptibilität von höchstens
0,01 aufweist. Als Ergebnis fällt die entsprechende Permeabilität μr = 1 + χ in den Bereich von 0,09~1,01.
Diese Werte innerhalb des Bereichs sind fast gleich der Permeabilität
von Luft, d. h. 1. Daher ist das statische Magnetfeld durch das
Gehäuse 203 nicht beeinträchtigt. Solche
wünschenswerten Materialien beinhalten Aluminium (χ =
2 × 10–5), Kupfer (χ = –9 × 10–6), Kupferlegierungen (Messing
und Cupronickel) und Kunstharze, sind aber nicht darauf beschränkt.
-
Manchmal
ist es bevorzugt, Metall als Material für das Gehäuse
zu verwenden. Dies liegt daran, dass Metall mechanisch stärker
und leichter zu verarbeiten ist als Harz. Wenn Metall für
das Gehäuse verwendet wird, muss zusätzlich zu
der Anforderung nach der magnetischen Suszeptibilität eine
Einschränkung berücksichtigt werden. Denn es muss
das Magnetfeld, das im Lauf der Zeit variabel ist, erfasst werden.
-
Da
die Drehung der Drehwelle
121 bei f[Hz] den Sensormagneten
202 veranlasst,
sich mit der gleichen Frequenz zu drehen, so dass sich das durch
das Gehäuse
203 hindurchgehende Magnetfeld im
Lauf der Zeit ändert. Damit der Magnetsensor
201 imstande
ist, das Magnetfeld wirksam zu messen, wird die Dicke t (in Meter)
jenes Teils des Gehäuses
203, das sich zwischen
dem Sensormagneten
202 und dem Magnetsensor
201 befindet,
dazu gebracht, die folgende Ungleichung zu erfüllen. [Ausdruck
38]
wobei δ
skin für
die Eindringtiefe (in Meter) des Materials steht, aus dem das Gehäuse
203 gemacht
ist, ρ für den Widerstand (in Ωm) des
Gehäuses steht, μ
0 die
Permeabilität von Vakuum (= 4π × 10
–7) steht und μ
r für die relative Permeabilität
des Gehäusematerials steht, das die magnetische Suszeptibilität
so betrifft, dass μ
r = 1 + χ.
Weiterhin bezeichnet f die maximale Drehfrequenz der Drehwelle
121 und
N
p ist die halbe Anzahl der Magnetpole des
Sensormagneten. N
p·f gibt nämlich
die Wiederholungsfrequenz an, mit der sich das Magnetfeld pro Sekunde ändert.
-
Der
folgende Ausdruck, der die Dicke t (in Meter) jenes Teils des Gehäuses
203 betrifft,
das sich zwischen dem Sensormagneten
202 und dem Magnetsensor
201 befindet,
kann aus der obigen Ungleichung (38) abgeleitet werden: [Ausdruck
39]
-
Die
Dicke t des Gehäuses 203, die mittels des Ausdrucks
(39) numerisch berechnet wird, beträgt höchstens
1,3 mm, wenn Np = 4 (im Fall eines 8-poligen
Magneten), die Drehfrequenz ist gleich 15.000 UpM und Aluminium
(Spezifischer Widerstand ρ = 2,75 × 10–8 Ωm) dient als Material
für das Gehäuse.
-
Alternativ
beträgt, wenn Np = 4 (im Fall eines
8-poligen Magneten), die Drehfrequenz gleich 15.000 UpM ist und
Messing, d. h. eine Cu(65%)-Zn(35%)-Legierung (Spezifischer Widerstand ρ =
6 × 10–8 Ωm),
als Material für das Gehäuse 203 dient,
die Dicke t des Gehäuses 203, die aus dem Ausdruck
(39) berechnet wird, höchstens 1,9 mm.
-
Wenn
das im Lauf der Zeit variierende Magnetfeld durch eine Substanz
hindurchgeht, erzeugen freie Elektronen in der Substanz Wirbelströme,
was die Intensität des durch die Substanz hindurchgehenden
Magnetfelds dämpft. 16 zeigt
grafisch die Beziehung zwischen einer wirksamen Drehfrequenz und
der Übertragung des Magnetfelds für verschiedene
Materialien mit einer Dicke von 1,3 mm. In 16 bezeichnet
die Abszisse die wirksame Drehfrequenz, gegeben durch Np × f,
die gleich der Anzahl der Drehungen pro Sekunde des Magnetfelds
ist. Es versteht sich, dass ein Material, das den niedrigeren spezifischen
Widerstand aufweist, die kleinere Dicke δskin für
die Eindringwirkung und daher das schwächere Magnetfeld
verursacht, das durch das Material hindurchgeht. Um ein Magnetfeld
mit einer Intensität zu erhalten, die stark genug ist,
dass der Magnetsensor 201 die Ausrichtung des Felds erfassen
kann, ist es erforderlich, dass die Permeabilität des Materials
mindestens 0,6 beträgt. Dies ist die Bedingung, die für
den Ausdruck (38) erforderlich ist.
-
Die
obige Beschreibung schlussfolgert, dass die Dicke jenes Teils des
Gehäuses 203, das sich zwischen dem Sensormagneten 202 und
dem Magnetsensor 201 befindet, die obigen genannten Forderungen erfüllt.
Die anderen Teile des Gehäuses 203 können
dicker sein.
-
In
diesem Ausführungsbeispiel wird auf der Grundlage der obigen
Analyse Aluminium als Material für das Gehäuse 203 verwendet
und die Dicke jenes Teils des Gehäuses 203, das
sich zwischen dem Sensormagneten 202 und dem Magnetsensor 201 befindet,
ist auf 1,3 mm eingestellt. Dementsprechend kann ein Drehwinkel-Messgerät
erhalten werden, das den Drehwinkel selbst dann, wenn die Drehwelle
mit 15.000 UpM gedreht wird, präzise erfasst.
-
Weiterhin
ist es, wie in 1 gezeigt, bevorzugt, dass der
Magnetsensor 201 mit der Mittellinie 226 der Drehwelle 121 ausgerichtet
angeordnet sein sollte. Konkreter gesagt, sollte die Sensorelementeinheit 301 im
Magnetsensor 201 vorzugsweise mit der Mittellinie 226 der
Drehwelle 121 ausgerichtet angeordnet sein. Der Grund dafür
ist: da die Verteilung des von dem Sensormagneten 202 erzeugten
Magnetfelds entlang der Mittellinie 226 der Drehwelle fast
parallel wird, kann das Korrekturausmaß der Feldverteilung
mit dieser Konfiguration klein sein. Dennoch wird die Korrektur
vorzugsweise unnötig, wenn die Differenz, die der Feldverteilung
zugeschrieben werden kann, zwischen dem Magnetfeldwinkel θm und dem Drehwinkel θr in
einen tolerierbaren Bereich fällt.
-
Nun
wird das sechste Ausführungsbeispiel dieser Erfindung beschrieben.
-
Das
in diesem Ausführungsbeispiel verwendete Drehwinkel-Messgerät
ist das gleiche wie dasjenige, das in 1 gezeigt
ist.
-
Bei
diesem Drehwinkel-Messgerät ist der Magnetsensor 201 auf
der Außenfläche des Gehäuses 203 angeordnet.
Wenn sich ein Magnetmaterialkörper, wie etwa Eisen, in
der Nähe des Drehwinkel-Messgeräts befindet, kann
er dementsprechend die räumliche Verteilung des von dem
Sensormagneten 202 erzeugten Magnetfelds manchmal beeinträchtigen.
Als Ergebnis ändert die Änderung der räumlichen
Verteilung des Magnetfelds die Beziehung zwischen dem Drehwinkel θr der Drehwelle 121 und dem Magnetfeldwinkel θm, der von dem Magnetsensor 201 zu
erfassen ist.
-
In
einem solchen Fall kann gemäß einem konventionellen
Verfahren, bei dem ein Drehwinkel-Messgerät in ein System
eingebaut wird, nachdem es von einem Korrekturaktuator/-kodierer
korrigiert worden ist, das so eingebaute Drehwinkel-Messgerät
den Drehwinkel θr nicht korrekt
messen.
-
Gemäß diesem
Ausführungsbeispiel misst das Drehwinkel-Messgerät,
das bereits in ein beteiligtes System eingebaut worden ist, die
Entsprechung von θr zu θm, während die Drehwelle 121 N
mal mit konstanter Geschwindigkeit gedreht wird. Der konkrete Ablauf
ist wie vorstehend bei dem ersten Ausführungsbeispiel beschrieben.
-
Gemäß diesem
Ausführungsbeispiel wird auf diese Weise, da der Korrekturablauf
durchgeführt wird, während das Drehwinkel-Messgerät
in das beteiligte System eingebaut ist, selbst dann, wenn sich die
räumliche Verteilung des Magnetfelds aufgrund des Einflusses
des nahen Magnetmaterialkörpers ändert, die Entsprechung
von θr zu θm in
einer solchen geänderten Verteilung des Magnetfelds gemessen.
Dementsprechend kann der Drehwinkel θr auch
in einem korrigierten System korrekt gemessen werden.
-
Es
wird nun das siebte Ausführungsbeispiel dieser Erfindung
unter Bezugnahme auf 17 und 18 beschrieben.
-
17 ist
eine Querschnittsansicht eines Drehwinkel-Messgeräts gemäß diesem
Ausführungsbeispiel. 18 ist
eine Seitenansicht von rechts des in 17 gezeigten
Drehwinkel-Messgeräts, das heißt, 17 ist
die Querschnittsansicht entlang der Linie A-B in 18.
-
Der
Aufbau einer Motoreinheit 100 dieses Ausführungsbeispiels
ist der gleiche wie derjenige des vorstehend beschriebenen dritten
Ausführungsbeispiels.
-
Eine
Drehwinkel-Messeinheit 200 besteht hauptsächlich
aus einem Magnetsensor 201, einem Sensormagneten 202,
einem Gehäuse 203 und einer Abdeckung 221.
-
Das
Merkmal dieses Ausführungsbeispiels ist, dass die Drehwinkel-Messeinheit 200 die
Abdeckung 221 aufweist. Die Abdeckung 221 besteht
aus einem Material, das eine magnetische Suszeptibilität χ von
mindestens 100 aufweist.
-
Der
Magnetschirmeffekt wird durch Abdecken der Drehwinkel-Messeinheit 200 mit
der Abdeckung 221 aus Material mit einer magnetischen Suszeptibilität χ von
mindestens 100 erzeugt. Als Ergebnis wird die spezielle bzw. räumliche
Verteilung des von dem Sensormagneten 202 erzeugten Magnetfelds
kaum gestört, selbst wenn ein Magnetmaterialkörper
in der Nähe der Drehwinkel-Messeinheit 200 platziert
wird. Auf diese Weise kann der Einfluss von der Umgebung, in der
das Drehwinkel-Messgerät platziert wird, beträchtlich
reduziert werden, so das eine Drehwinkelmessung korrekt durchgeführt
werden kann.
-
Materialien
mit einer magnetischen Suszeptibilität χ von mindestens
100 schließen weiches Eisen (χ = 2000), Eisen
(χ = 5000), Siliciumstahl (χ = 7000), Mu-Metall
(χ = 100.000) usw. ein. In diesem Ausführungsbeispiel
wird Eisen verwendet.
-
Material
mit einer magnetischen Suszeptibilität von höchstens
0,01 wird für das Gehäuse 203 verwendet,
das zwischen dem Sensormagneten 202 und dem Magnetsensor 201 positioniert
ist. In diesem Ausführungsbeispiel wird ein 1,3 mm dickes
Aluminiumblech zum Bilden des Gehäuses verwendet.
-
Ein
wasserdichter Aufbau wird durch Einfügen eines Dichtungsmittels 210 zwischen
das Gehäuse 203 und die Motoreinheit 100 erzielt.
In diesem Ausführungsbeispiel bilden das Gehäuse 203 und
die Motoreinheit 100 eine wasserdichte Grenze.
-
Der
Magnetsensor 201 ist auf einer Sensorhalterung 206 befestigt,
die starr auf der zweiten Klammer 103 angebracht ist. Die
Sensorhalterung 206 besteht aus einem Material mit einer
magnetischen Suszeptibilität von höchstens 0,01,
um zu verhindern, dass die Verteilung des Magnetfelds gestört
wird.
-
Da
sich der Magnetsensor 201 außerhalb der wasserdichten
Grenze befindet, wird die Montage einfacher. Es ist besonders einfach,
die Führungsdrähte 208 des Magnetsensors 201 aus
dem Inneren des Drehwinkel-Messgeräts herauszuführen.
-
Durch
die Abdeckung 221 wird ein Loch 223 gemacht. Das
Loch 223 dient als Ausgang zum Herausführen der
Führungsdrähte 208 und als Abzug für
eine Drainage. Das heißt, selbst wenn Wasser irgendwie
in die Drehwinkel-Messeinheit 200 läuft, kann
es durch das Loch ablaufen. Da Wasser eine magnetische Suszeptibilität χ = –9 × 10–6 aufweist, übt es keinen
Einfluss auf die Verteilung des statischen Magnetfelds aus. Wenn
jedoch Wasser dort während einer langen Zeitdauer vorhanden
ist, kann das Problem entstehen, dass das Wasser Rost und/oder eine
Verschlechterung der Isolierung verursacht. Daher sollte Wasser
in der Drehwinkel-Messeinheit 200 vorzugsweise so schnell
wie möglich ablaufen gelassen werden.
-
Weiterhin
werden gemäß diesem Ausführungsbeispiel
Löcher für eine Wasserdrainage in drei Positionen
geschaffen, wie 18 gezeigt, um durch sie das
Wasser ablaufen zu lassen, das sich im Innern ansammelt, welche
Haltung das Drehwinkel-Messgerät auch einnehmen mag.
-
Wenn
die aus einem Material mit hoher Permeabilität bestehende
Abdeckung 221 an der Drehwinkel-Messeinheit 200 angebracht
wird, wird die räumliche Verteilung des von dem Sensormagneten 202 erzeugten
Magnetfelds geändert, da der von dem Magneten ausgehende
Magnetfluss leicht durch das Material von hoher Permeabilität
hindurchgeht.
-
In
einem solchen Fall sollte nach dem Anbringen der Abdeckung 221 ein
Korrekturablauf wie vorstehend beschrieben durchgeführt
werden, indem die Beziehung zwischen dem Drehwinkel θr der Drehwelle 121 und dem Magnetfeldwinkel θm gemessen wird.
-
Da
die äußere Umgebung, wo das Drehwinkel-Messgerät
platziert ist, nur einen ausreichend kleinen Einfluss auf die Verteilung
des Magnetfelds ausübt, kann gemäß diesem
Ausführungsbeispiel eine ausreichende Messgenauigkeit ohne
Neukorrektur sichergestellt werden, die andernfalls nach der Installation
des Drehwinkel-Messgeräts vorgenommen werden könnte.
-
Nachstehend
wird das achte Ausführungsbeispiel dieser Erfindung unter
Bezugnahme auf 19 und 20 beschrieben.
-
19 ist
eine Querschnittsansicht eines Drehwinkel-Messgeräts gemäß diesem
Ausführungsbeispiel. 20 ist
eine Seitenansicht von rechts des in 19 gezeigten
Drehwinkel-Messgeräts, das heißt, 19 ist
die Querschnittsansicht entlang der Linie A-B in 20.
-
Der
Aufbau einer Motoreinheit 100 dieses Ausführungsbeispiels
ist der gleiche wie derjenige des vorstehend beschriebenen dritten
Ausführungsbeispiels.
-
Der
Aufbau einer Drehwinkel-Messeinheit 200 ist der gleiche
wie derjenige des vorstehend beschriebenen vierten Ausführungsbeispiels.
Jedoch zeichnet sich dieses achte Ausführungsbeispiel dadurch
aus, dass der Magnetsensor 201 mit der Mittellinie 226 der
Drehachse des Sensormagneten 202 ausgerichtet ist.
-
Da
die Verteilung des Magnetfelds entlang der Mittellinie des Drehwinkels
des Sensormagneten fast parallel ist, kann der Vorteil genutzt werden,
dass das Korrekturausmaß des Magnetfelds verringert werden kann.
-
Da
der Magnetsensor 201 direkt auf dem Gehäuse 203 angebracht
ist, ist bei diesem Ausführungsbeispiel ein Vorsehen der
Sensorhalterung 206 nicht notwendig, so dass der Aufbau
in vorteilhafter Weise vereinfacht wird.
-
(DREHZAHL-MESSGERÄT)
-
Nachstehend
wird das neunte Ausführungsbeispiel dieser Erfindung unter
Bezugnahme auf 21 und 22 beschrieben.
-
21 ist
eine Querschnittsansicht eines Drehzahl-Messgeräts gemäß dieser
Erfindung.
-
Dieses
Ausführungsbeispiel umfasst eine Drehwelle 121,
die sich synchron mit einem Objekt dreht, dessen Drehzahl zu messen
ist, einen Sensormagneten 202, der fest an dem Ende der
Drehwelle 221 angebracht ist, und einen Magnetsensor 201 zum
Erfassen der Ausrichtung des von dem Sensormagneten 202 erzeugten
Magnetfelds. Die Drehwelle 121 ist mittels eines an einem
Gehäuse 261 angebrachten Lagers 262 drehbar
gehalten. Der Magnetsensor 201 ist an dem Gehäuse 203 fest
angebracht.
-
Das
Gehäuse 203 besteht aus einem Material mit einer
magnetischen Suszeptibilität von höchstens 0,01,
um die räumliche Verteilung des Magnetfelds nicht zu stören.
In diesem Ausführungsbeispiel wird ein Gehäuse
aus einem Harzmasseaufbau verwendet.
-
Der
Magnetsensor 201 ist so angeordnet, dass er mit der Mittellinie 226 der
Drehachse des Sensormagneten 202 ausgerichtet sein kann.
Da das von dem Sensormagneten 202 erzeugte Magnetfeld entlang
der Mittellinie 226 der Drehachse 226 fast parallel
ist, sollte sich der Magnetsensor 201 vorzugsweise in dieser Position
befinden, um die Differenz zwischen dem Drehwinkel θr der Drehwelle 121 und dem Magnetfeldwinkel θm zu verringern.
-
Der
Magnetsensor 201 umfasst eine COS-Brücke und eine
SIN-Brücke, die Signale abgeben, die proportional cosθm bzw. sinθm sind.
Nun soll B eine Proportionalitätskonstante bezeichnen,
dann geben die COS- und SIN-Brücken Signalspannungen ab,
die als Vx = Bcosθm bzw.
Vy = Bsinθm bezeichnet
werden.
-
Die
Zeitableitung der Signalspannung V
x ist
wie folgt. [Ausdruck
40]
-
Daher
wird die Drehzahl ω = dθ
m/dt
des Magnetfeldwinkels θ
m wie folgt
erhalten. [Ausdruck
41]
-
In
gleicher Weise kann die Zeitableitung der Signalspannung V
y der SIN-Brücke die Drehzahl wie
folgt ergeben. [Ausdruck
42]
-
Auf
diese Weise wird die Drehzahl des Magnetfeldwinkels θm erhalten. Dieser Ablauf weist Merkmale auf,
wie nachstehend beschrieben.
-
Zuerst
kann die Drehzahl ermittelt werden, ohne auf den Ablauf zurückzugreifen,
bei dem eine ArcTan-Funktion (Arc-Tangens-Verfahren) verwendet wird.
Außerdem kann, da die Proportionalitätskonstante
B, die in den Signalspannungen beinhaltet ist, aufgehoben wird,
die Drehzahl nur durch die Teilung der Zeitableitung von Vx durch Vy ermittelt
werden. Wogegen eine Berechnung unter Verwendung der ArcTan-Funktion
gewöhnlich viel Berechnungszeit benötigt, kann
das Verfahren gemäß diesem Ausführungsbeispiel;
das sich nicht auf die ArcTan-Funktion verlassen muss, ein Drehzahl-Messgerät
realisieren, das bei Hochgeschwindigkeitsmessungen angewendet werden
kann.
-
Zweitens,
obwohl die Ausdrücke (41) und (42) unterschiedliche Signalverarbeitungen
durchführen, sind die Ergebnisse beider Verfahren einander
gleich, das heißt, die Drehzahl des Magnetfeldwinkels θm. Daher müssen ωm1 und ωm2 den
gleichen Wert annehmen. Mit anderen Worten, wenn sie unterschiedliche
Werte annehmen, zeigt dies eine anormale Bedingung an, die im Drehzahl-Messgerät
stattfindet.
-
Konkret
gesagt, es wird unter Berücksichtigung der Messgenauigkeit
ein Fehlererfassungssignal nur dann erzeugt, wenn die Differenz
zwischen dem einen Wert und dem anderen Wert außerhalb
eines bestimmten Wertebereichs fällt.
-
22 zeigt
grafisch einen Signalfluss im Zusammenhang mit einem konkreten Verfahren
zum Erfassen der Drehzahl nach Maßgabe des Vorgangs, wie
vorstehend beschrieben. In 22 bezeichnet „Z–1” einen Verzögerungsvorgang
pro Takt. Die Verzögerungsvorgänge sind gefolgt
von Differenzierungsvorgängen. Dann werden die Vorgänge
durchgeführt, die den Ausdrücken (41) und (42)
entsprechen. Die Absolutwerte von Vx und
Vy werden miteinander verglichen und der
Wert jener Drehzahl, der durch die Teilung durch des größeren von
Vx und Vy berechnet
wird, wird übernommen. Auf diese Weise wird die Vergrößerung
des Fehlers vermieden, der durch die Teilung durch einen Wert, der
fast gleich Null ist, verursacht wird.
-
Zur
gleichen Zeit wird die Differenz zwischen ωm1 und ωm2 berechnet, und wenn die Differenz einen bestimmten
festgelegten Wert ε überschreitet, wird ein Fehlererfassungssignal
ausgegeben.
-
Die
vorstehende Beschreibung ist dem Drehzahl-Messgerät gewidmet,
aber die Kombination des Drehzahl-Messgeräts und einem
der Drehwinkel-Messgeräte der obigen Ausführungsbeispiele
wird gleichermaßen nützlich sein. Konkret gesagt,
kann das Signalverarbeitungsverfahren, wie in 22 gezeigt,
in die oben beschriebene Erfassungsschaltungseinheit 302 eingebaut
werden. Eine solche Konfiguration, die sowohl den Drehwinkel θr als auch die Drehzahl ω gleichzeitig
ermitteln kann, ist nützlich, wenn sie als Sensor für
die Vektorsteuerung eines Elektromotors angewendet wird.
-
Weiterhin
ist eine andere Konfiguration ebenfalls nützlich, in der
nur die Fehlererfassungsfunktion, die in dem Verfahren, das in 22 gezeigt
ist, verwendet wird, in dem Drehwinkel-Messgerät eingebaut
ist, das als irgendeines der vorstehend beschriebenen Ausführungsbeispiele
beschrieben ist. Auf diese Weise kann ein Drehwinkel-Messgerät
mit einer Fehlererfassungsfunktion erhalten werden. Gemäß dem
vorstehend beschriebenen Verfahren kann eine Fehlererfassung durch
einen kleinen Berechnungsbetrag bewirkt werden, so dass die Verzögerung
von dem Auftreten eines Fehlers bis zu seiner Erfassung verkürzt
werden kann, und so dass auch die Zuverlässigkeit des Drehwinkel-Messgeräts
verstärkt wird.
-
Das
elfte Ausführungsbeispiel dieser Erfindung wird unter Bezugnahme
auf 23 beschrieben. Dieses Ausführungsbeispiel
ist das gleiche wie das Drehzahl-Messgerät, das in 21 gezeigt
ist, ausgenommen, dass die Verarbeitungsschaltung durch analoge
Schaltungen mit den gleichen Funktionen ersetzt ist. 23 ist
ein Blockdiagramm der Verarbeitungsschaltungen.
-
Die
Verarbeitungsschaltungen bestehen aus Differenzierungsschaltungen
und Teilungsschaltungen, die alle mit analogen Komponenten aufgebaut
sind, und der Fehlererfassungsvorgang wird von einem Komparator
durchgeführt.
-
Gemäß diesem
Ausführungsbeispiel kann eine Echtzeitverarbeitung bewirkt
werden, da die Verarbeitungsschaltung allein mit analogen Komponenten
realisiert werden kann. Da keine Mikrosteuerung benötigt wird,
wird außerdem ein Drehwinkel-Messgerät bereitgestellt,
das gegen Umwelteinflüsse, wie etwa hohe Temperaturen,
immun ist.
-
Das
zwölfte Ausführungsbeispiel dieser Erfindung wird
unter Bezugnahme auf 30A und 30B beschrieben.
-
Dieses
Ausführungsbeispiel ist das gleiche wie das vorstehend
beschriebene erste Ausführungsbeispiel, ausgenommen, dass
die Position der Erfassungsschaltungseinheit 302 im Magnetsensor 201 geändert ist.
-
Im
ersten Ausführungsbeispiel sind die Sensorelementeinheit 301 und
die Erfassungsschaltungseinheit 302 in den Magnetsensor 201 eingebaut,
wie in 30A gezeigt.
-
Dagegen
ist in diesem zwölften Ausführungsbeispiel, wie
in 30B gezeigt, die Sensorelementeinheit 301 allein
in der Position des in 5 gezeigten Magnetsensors 201 angeordnet,
während die (in 5 nicht gezeigte) Erfassungsschaltungseinheit 302 außerhalb
des in 5 gezeigten Gehäuses 203 angeordnet ist.
Wie in 30B gezeigt, werden Anregungsspannungen
durch die Treiberschaltungseinheit 340 in der Erfassungsschaltungseinheit 302 erzeugt
und die erzeugten Anregungsschaltungen werden über die
Signalführungsdrähte 208 übertragen
und an die Sensorelementeinheit 301 angelegt. Die Signalausgabe
von der Sensorelementeinheit wird über die Signalführungsdrähte 208 übertragen
und an die Erfassungsschaltungseinheit 302 angelegt. Danach
sind die Signalverarbeitungs- und Korrekturvorgänge die
gleichen wie diejenigen, die in dem ersten Ausführungsbeispiel
angewendet sind.
-
In
diesem Ausführungsbeispiel ist die Erfassungsschaltungseinheit 302 in
einem Abstand von der Motoreinheit 100 angeordnet. Im Allgemeinen
ist die Signalverarbeitungsschaltung, die den Hauptteil der Erfassungsschaltungseinheit 302 bildet,
innerhalb eines relativ engen Temperaturbereichs von –40°C~125°C
funktionsfähig und soll daher bei hohen Temperaturen oder
extrem niedrigen Temperaturen anfällig sein.
-
Andererseits
jedoch kann die Motoreinheit 100 oft in einer Umgebung
mit hohen Temperaturen angeordnet sein oder kann von sich aus Wärme
erzeugen, die von Bedingungen für den Gebrauch abhängen.
Dementsprechend weist dieses Ausführungsbeispiel den Vorteil
auf, dass der Temperaturbereich, in dem die Motoreinheit 100 betrieben
wird, aufgrund dessen, dass die Erfassungsschaltungseinheit 302 in
einem Abstand von der Hochtemperaturzone angeordnet ist, erweitert
werden kann.
-
Das
Drehwinkel-Messgerät dieses Ausführungsbeispiels
umfasst die in 5 gezeigte Motoreinheit 100,
die Drehwinkel-Messeinheit 200 und die Erfassungsschaltungseinheit 302,
die außerhalb des Gehäuses 203 angeordnet
ist.
-
Die
Erfassungsschaltungseinheit 302 kann in der elektronischen
Steuerungseinheit ECU des Systems eingebaut sein, das das Drehwinkel-Messgerät
beinhaltet. Auch können Signalverarbeitungen, wie etwa
eine Winkelberechung und -korrektur, von dem Mikrocomputer ausgeführt
werden, der in der ECU des Systems eingebaut ist. Mit dieser verwendeten
Gestaltung kann ein redundanter Anteil in der Signalverarbeitungseinheit eliminiert
werden, so dass ein Drehwinkel-Messgerät zu niedrigen Kosten
bereitgestellt werden kann.
-
Die
in 31 gezeigte Konfiguration als Zwischenkonfiguration
zwischen denjenigen, die in 30A und 30B gezeigt sind, ist in Abhängigkeit
von den Bedingungen für den Gebrauch von Nutzen. In der
in 31 gezeigten Konfiguration sind die Treiberschaltungseinheit 340,
die Erfassungsschaltungen 351 und die A/D-Wandler 352 in
dem Magnetsensor 201 beinhaltet, der in dem Gehäuse 203 angeordnet
ist, während die Erfassungsschaltungseinheit 302 in
einem Abstand angeordnet ist.
-
Vorstehend
ist ein Beispiel beschrieben, in dem die Erfassungsschaltungseinheit 302 außerhalb
des Gehäuses 203 angeordnet ist. Jedoch kann die
Erfassungsschaltungseinheit 302 auch innerhalb des Gehäuses 203 angeordnet
sein.
-
Auch
im Fall des fünften Ausführungsbeispiels, in dem
der Magnetsensor 201 außerhalb des Gehäuses
angeordnet ist, ist die in 30B gezeigte
Konfiguration nützlich.
-
Der
Grund für diese Nützlichkeit ist, dass die Erfassungsschaltungseinheit 302 in
einem Abstand von einer Hochtemperaturzone angeordnet sein kann
und dass die Redundanz in der Schaltungskonstruktion eliminiert
werden kann, indem die ECU des Systems veranlasst wird, bei der
Signalverarbeitung zusammenzuarbeiten.
-
Die
Erfassungsschaltungseinheit 302 beinhaltet eine Winkelberechnungseinheit 371,
eine Korrektureinheit 372 und eine Zeiteinstellungssignal-Erzeugungseinheit 331.
Die Zeiteinstellungssignal-Erzeugungseinheit 331 ist eine
logische Einheit zum Erzeugen des Zeiteinstellungssignals, das den
A/D-Wandlern im Magnetsensor 201 hilft, ihre Umwandlungsvorgänge
durchzuführen.
-
Der
Magnetsensor 201 umfasst eine Sensorelementeinheit 301,
eine Treiberschaltungseinheit 340, Erfassungsschaltungen 351A und 351B und
A/D-Wandler 351A und 351B. Die Treiberschaltungseinheit 340 beinhaltet
eine Zeiteinstellungssignal-Erzeugungseinheit B 332, die
eine Zeiteinstellungssteuerung im Magnetsensor 201 in Ansprechung
auf das Signal von der Zeiteinstellungssignal-Erzeugungseinheit
A 331 durchführt. Konkret gesagt, erzeugt die
Zeiteinstellungssignal-Erzeugungseinheit B 332 Zeiteinstellungssignale
zum Bilden von Impulsen aus Anregungsspannungen und legt die Impulse
an die Ausgabeeinheit 341 mit positiver Polarität
und die Ausgabeeinheit 345 mit negativer Polarität
an. Synchron mit der Impulsanlegung sendet die Zeiteinstellungssignal-Erzeugungseinheit
B 332 Signale auch an die A/D-Wandler 352A und 352B aus,
um die Ausgabesignale von der Sensorelementeinheit 301 zu
erfassen.
-
Die
von der Sensorelementeinheit 301 ausgegebenen Signale werden
von der Erfassungsschaltung 351A zur Abgabe einer Ausgabe
differenziell verstärkt, die von dem A/D-Wandler 352A in
ein digitales Signal umgewandelt wird. Dieses digitale Signal wird über
die Signalführungsdrähte 208 an die Erfassungsschaltungseinheit 302 übertragen.
Das digitale Signal sollte vorzugsweise in Form eines Seriensignals übertragen werden,
da eine Signalserienübertragung die Anzahl von Signalleitungen
reduzieren kann, die als die Signalführungsdrähte 208 dienen.
-
Mit
dieser Konfiguration wird das Signal von der ersten Sensorelementeinheit 301 zuerst
in das entsprechende digitale Signal umgewandelt, und dann wird
das digitale Signal durch die Signalführungsdrähte 208 übertragen.
Dementsprechend genießt man den Vorteil, dass das Signal
weniger anfällig für Rauschen wird.
-
Drei
Beispiele der Aufbauten für den Magnetsensor 201 sind
bisher beschrieben worden, wie in den 30A, 30B und 31 gezeigt.
Jedoch muss nicht erwähnt werden, dass ein beliebiger Zwischenaufbau
zwischen ihnen machbar ist und innerhalb des Umfangs dieser Erfindung
liegt.
-
Es
muss auch nicht erwähnt werden, dass die Konfiguration,
in der die Erfassungsschaltungseinheit 302 in einem Abstand
angeordnet ist, bei anderen Ausführungsbeispielen als dem
Ausführungsbeispiel 1 in nützlicher Weise angewendet
werden kann.
-
In
dieser gesamten Beschreibung der vorliegenden Erfindung hindurch
erfolgt die Beschreibung mit Riesen-Magneto-Widerstandselementen
(GMR-Elementen), die für die Magnetwiderstandselemente
zum Zweck des Messens eines Magnetfelds verwendet werden. Weiterhin
beinhalten die Magnetwiderstandselemente anisotrope Magnetwiderstandselemente.
Daher kann man sagen, dass ein Drehwinkel-Messgerät, das anisotrope
Magnetwiderstandselemente verwendet, in den Umfang der vorliegenden
Erfindung fällt.
-
Es
sollte von den Fachleuten auf dem Gebiet weiterhin verstanden werden,
dass die vorstehende Beschreibung zwar an Ausführungsbeispielen
der Erfindung erfolgt, die Erfindung aber nicht darauf beschränkt ist
und verschiedene Änderungen und Modifikationen vorgenommen
werden können, ohne vom Konzept der Erfindung und dem Umfang
der beigefügten Ansprüche abzuweichen.
-
ZITATE ENTHALTEN IN DER BESCHREIBUNG
-
Diese Liste
der vom Anmelder aufgeführten Dokumente wurde automatisiert
erzeugt und ist ausschließlich zur besseren Information
des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen
Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt
keinerlei Haftung für etwaige Fehler oder Auslassungen.
-
Zitierte Patentliteratur
-
- - JP 3799270 [0002, 0189, 0194]
- - JP 2008-11661 A [0019, 0019]
- - JP 2008-151774 A [0122]