CN1187972C - 图像收集装置,图像检索装置以及图像收集检索系统 - Google Patents
图像收集装置,图像检索装置以及图像收集检索系统 Download PDFInfo
- Publication number
- CN1187972C CN1187972C CNB018007635A CN01800763A CN1187972C CN 1187972 C CN1187972 C CN 1187972C CN B018007635 A CNB018007635 A CN B018007635A CN 01800763 A CN01800763 A CN 01800763A CN 1187972 C CN1187972 C CN 1187972C
- Authority
- CN
- China
- Prior art keywords
- image
- unit
- image data
- map
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000012545 processing Methods 0.000 claims description 195
- 238000003384 imaging method Methods 0.000 claims description 129
- 238000000034 method Methods 0.000 claims description 48
- 238000012937 correction Methods 0.000 claims description 33
- 238000001514 detection method Methods 0.000 claims description 27
- 238000004891 communication Methods 0.000 claims description 23
- 238000005520 cutting process Methods 0.000 claims description 17
- 230000010287 polarization Effects 0.000 claims description 13
- 230000005540 biological transmission Effects 0.000 claims description 7
- 238000003702 image correction Methods 0.000 claims description 2
- 230000002596 correlated effect Effects 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 46
- 230000002194 synthesizing effect Effects 0.000 description 22
- 239000000284 extract Substances 0.000 description 12
- 230000000694 effects Effects 0.000 description 9
- 238000012546 transfer Methods 0.000 description 7
- 230000001360 synchronised effect Effects 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 4
- 238000000605 extraction Methods 0.000 description 4
- 238000007726 management method Methods 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000013500 data storage Methods 0.000 description 2
- 238000002594 fluoroscopy Methods 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000001454 recorded image Methods 0.000 description 2
- 230000000717 retained effect Effects 0.000 description 2
- 238000003786 synthesis reaction Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000013075 data extraction Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000005358 geomagnetic field Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
Images






















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/78—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using electromagnetic waves other than radio waves
- G01S3/782—Systems for determining direction or deviation from predetermined direction
- G01S3/783—Systems for determining direction or deviation from predetermined direction using amplitude comparison of signals derived from static detectors or detector systems
- G01S3/784—Systems for determining direction or deviation from predetermined direction using amplitude comparison of signals derived from static detectors or detector systems using a mosaic of detectors
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/51—Indexing; Data structures therefor; Storage structures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/54—Browsing; Visualisation therefor
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
- G09B29/106—Map spot or coordinate position indicators; Map reading aids using electronic means
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/76—Television signal recording
- H04N5/765—Interface circuits between an apparatus for recording and another apparatus
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/76—Television signal recording
- H04N5/91—Television signal processing therefor
- H04N5/92—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback
- H04N5/9201—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback involving the multiplexing of an additional signal and the video signal
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/76—Television signal recording
- H04N5/91—Television signal processing therefor
- H04N5/92—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback
- H04N5/9201—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback involving the multiplexing of an additional signal and the video signal
- H04N5/9206—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback involving the multiplexing of an additional signal and the video signal the additional signal being a character code signal
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/76—Television signal recording
- H04N5/91—Television signal processing therefor
- H04N5/92—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback
- H04N5/926—Transformation of the television signal for recording, e.g. modulation, frequency changing; Inverse transformation for playback by pulse code modulation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/76—Television signal recording
- H04N5/765—Interface circuits between an apparatus for recording and another apparatus
- H04N5/775—Interface circuits between an apparatus for recording and another apparatus between a recording apparatus and a television receiver
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- General Engineering & Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Electromagnetism (AREA)
- Radar, Positioning & Navigation (AREA)
- Mathematical Physics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Software Systems (AREA)
- Library & Information Science (AREA)
- Remote Sensing (AREA)
- Processing Or Creating Images (AREA)
- Instructional Devices (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
- Closed-Circuit Television Systems (AREA)
- Television Signal Processing For Recording (AREA)
Abstract
本发明的目的是保持摄影操作的聪敏性并在实现与照相机无关的功能的操作模式中保护摄影镜头并提高便携性。在判断是否通过模式设定开关设定了照相机模式、断开模式及声音模式中的一个模式的转移处理(步骤S60)中,在设定实现是与照相机无关的功能的声音重现功能的声音模式的场合中,进行关闭摄影镜头的镜头盖的处理(步骤S68)。
Description
技术领域
本发明涉及收集拍摄了室外,室内,海底,地下,上空,宇宙等各种空间的图像,并且能够与摄影位置相对应,检索、再生、编辑所收集的图像的图像收集装置,图像检索装置以及图像收集检索系统。
背景技术
以往,例如为了进行汽车或者卡车等的运行管理,在需要用摄像机拍摄各种地点的道路状况记录在磁带上,带回到办公室特定再生各地点的图像的情况下,首先,在摄影时刻,利用在摄像机中具备的磁带计数器或者时间计数器,摄影者自己使摄影地点与其计数值相对应进行存储,在再生时,参考其记录数据,再生所希望地点的道路状况的图像。
但是,如果摄影地点多,摄影时间长,则管理这些记录数据很繁杂,存在着在编辑处理方面需要花费很多的时间和劳力的问题。为此,例如,在特开平7-248726号公告中所述的利用GPS的位置图像数据收集装置及其再生装置中,根据第48图所示结构,能够使摄影地点的位置数据与图像数据相对应,简单地再生所希望的图像数据。
在第48图中,位置信息检测单元308根据通过GPS(GlobalPositioning System)天线301接收的GPS信号把检测出了当前位置的纬度和经度的位置数据输出到位置信息匹配单元308。图像输入处理单元304把用摄像装置303拍摄的图像信号输出到图像存储单元306的同时,输出到地址信息匹配单元308。图像存储单元306把所输入的图像信号作为图像数据与摄影时间数据一起记录在图像记录媒体305中。另一方面,图像信息匹配单元308生成使位置数据与记录了图像数据的图像记录媒体上的记录地址相对应的图像管理数据库307。
图像位置指定单元313读出地图信息记录媒体309的地图信息,显示地图,指定在该地图上再生的地点。地址信息变换单元313根据由图像位置指定单元313通过检索图像管理数据库获得与由图像位置指定单元313所指定地点的地址相对应的图像数据的记录地址,输出到图像输出处理单元316,图像输出处理单元316从图像存储单元306获得与该记录地址相对应的图像数据,再生所获得的图像数据。由此,能够直接再生所希望地点中的图像数据。
但是,在上述以往的利用GPS的位置图像数据收集装置中,地址信息匹配单元308由于在获得图像数据和位置信息的同时进行图像数据的记录地址与拍摄位置的对应,因此需要使用通信线路连接拍摄图像数据的摄影装置303、GPS天线301以及位置信息检测单元302。因此,例如,在多台车辆几乎在同一个位置并排行驶的状态下拍摄多个图像时,需要在各台车辆上设置上述摄影装置303和位置信息检测单元302,增大了装置总体规模的同时,存在着不能够进行有效拍摄的问题。
另外,在上述以往的利用GPS的位置图像数据收集装置中,虽然用图像位置指定单元313指定地图上的位置,但是与所显示的图像数据的位置关系在地图上不明确,存在着不能够可靠地再生拍摄了所希望位置图像数据的问题。
进而,在使用者想再生所希望的两个地点之间的图像数据时,使用多个一系列图像数据进行再生时,存在着中途切断各个一系列图像数据之间的连接问题。
另外,在使用多个一系列图像数据,把通过交叉点的交点图像从一方的一系列图像数据切换为另一方的一系列图像数据进行再生时,在交点一方的一系列图像数据的拍摄方向与另一方的一系列图像数据的拍摄方向不同时,在该情况下,在交点被拍摄物急剧地变化,存在着显示难以观看的图像的问题。
进而,在所拍摄的一系列图像数据内存在着不需要的图像数据时,进行消除了该图像数据生成新的一系列的图像数据的编辑处理,但是存在着从一系列图像数据中指示消除对象的图像数据区很繁杂,随意性差的问题。
另外,在车辆等中搭载摄影装置收集图像时,例如由于等待交通信号等车辆的移动速度不一定恒定,因此在所拍摄的图像中包含有冗长的图像数据,存在着不能够进行有效的图像数据记录的问题。
进而,有时希望在地图上不仅能够可靠地指示地上,还能够可靠地指示拍摄了高层建筑的屋顶部分或者地下街的图像数据。另外,有时希望了解所再生的图像内的建筑物位于地图上的哪个部分。进而,有时还希望知道在所再生的图像内的位置中配置了新建筑物的情况下所发生的景观差异。另外,利用者有时还希望能够实时地观看当前拍摄的图像的状况。
从而,本发明的目的在于提供能够通过简单的结构容易地进行图像数据的收集,能够可靠地指示、再生拍摄的图像数据,能够可靠地把握对于再生图像的地图上的位置关系,同时,能够容易而且柔性地进行对于图像数据的各种加工处理的图像收集装置,图像检索装置以及图像收集检索系统。
发明的公开
一种图像检索装置,特征在于具备:读取包括一系列图像数据和每个图像数据的摄影时间的图像数据文件的图像读入装置;保持由上述图像读入装置读入的图像数据文件的图像数据文件保持装置;读取包括获得上述图像数据文件的拍摄位置及其摄影时间的属性信息的属性信息读取装置;根据上述摄影时间使得保持在上述图像数据文件保持装置中的图像数据与由上述属性信息读取装置读取的属性信息相对应的对应装置;保持由上述对应装置确定的对应关系的图像数据库装置;保持地图数据的地图数据保持装置;根据上述地图数据在地图显示装置上显示地图数据的地图显示处理装置;检索上述图像数据库装置的图像检索装置;由上述图像检索装置检索在上述地图显示装置中显示的地图内具有拍摄位置的图像数据文件,把所检索的拍摄位置在上述地图上作为拍摄轨迹进行显示的轨迹显示处理装置;播放上述图像数据文件的数据显示装置;指示在上述地图显示装置上显示的地图上的位置的位置指示装置;从上述图像数据文件保持装置获取与由上述位置指示装置指示的位置附近的拍摄位置相对应的图像数据文件,并且在上述图像显示装置中播放所产生的图像数据的图像处理装置。
如果依据本发明,则首先,图像读入装置与摄影时间一起读入所记录的一系列图像数据,把该一系列图像数据保持在图像数据保持装置中。然后,对应装置使用属性信息读取装置,读取包含至少取得了上述一系列图像数据的拍摄位置与摄影时间的属性信息,根据摄影时间进行上述图像数据保持装置所保持的一系列图像数据的对应,把该对应关系作为图像数据库,保持在图像数据库单元中。另一方面,地图显示处理装置根据保持在地图数据保持装置中的地图数据在地图显示装置上进行显示地图数据的处理。然后,轨迹显示处理装置由图像检索装置在上述图像数据库内检索在上述地图显示装置中显示的地图内具有拍摄位置的图像数据,把所检索的拍摄位置在上述地图上显示为轨迹。然后,如果位置指示装置指示地图上的位置,则图像显示处理装置从上述图像数据保持装置获取与所指示的位置附近的拍摄位置相对应的图像数据,在图像显示装置中进行再生显示。
本发明又一方案的图像检索装置是在上述方案中,特征在于上述属性信息还包括摄影方位,摄影方向,摄影角度或者把它们组合起来的信息。
如果依据本发明,则使得上述属性信息中包括摄影方位,摄影方向,摄影角度或者把它们组合起来的信息,使得把这些信息保持为图像数据库。
本发明又一方案的图像检索装置特征在于在上述方案中,上述轨迹显示处理装置还具备在上述地图上显示由通过上述图像检索装置检索在上述地图显示装置中显示的具有地图内摄影位置的一系列图像数据,并且把所检索的一系列图像数据的各个摄影位置连接起来的路径,以及沿着该路径滑动,表示图像数据的再生开始位置的输入按钮构成的滑动条的轨迹型按钮显示处理装置。
如果依据该发明,轨迹型按钮显示处理装置通过图像检索装置检索在地图显示装置上显示具有地图内的摄影位置的一系列图像数据,并且在上述地图上显示把所检索的一系列的图像数据的各个摄影位置连接起来的路径以及沿着该路径滑动,指示图像数据的再生开始位置输入用按钮构成的滑动条,通过地图上输入装置使该输入用按钮滑动,指示图像数据的图像开始位置。
本发明又一方案的图像检索装置在上述方案中,特征在于还具备路径检索装置,该路径检索装置由上述图像检索装置检索存在于表示由上述位置指示装置指示了摄影开始与摄影结束的两个位置之间所存在的一系列图像数据,生成经过了表示该一系列图像数据的摄影位置的上述两个位置之间的路径,在上述地图显示装置上显示该路径上的显示位置的轨迹,如果由上述位置指示装置指示了摄影位置,则显示该摄影位置以后的上述路径上的图像数据。
如果依据本发明,则路径探索装置如果由上述图像检索装置检索表示由位置指示装置所指示的位置开始与位置结束这两个位置之间所存在的一系列的图像数据,生成经过了该一系列图像数据所表示的摄影位置的上述两个位置之间的路径,在上述地图显示装置上显示该路径上的摄影位置的轨迹,并且由上述位置指示装置指示摄影位置,则显示该摄影位置以后的上述路径上的图像数据。
本发明又一方案的图像检索装置的特征在于在上述方案中,上述图像处理装置在上述两个位置之间的路径上存在着多个一系列图像数时,把该路径上的图像数据连接进行再生显示。
如果依据本发明,则图像处理装置在上述两个位置之间的路径上存在着多个一系列图像数据时,自动地连接并且再生显示该路径的图像数据。
本发明又一方案的图像检索装置特征在于在上述方案中,还具备保持拍摄了一系列图像数据相交叉的交点周围的交点图像的交点图像保持装置;保持上述交点图像与该交点图像的属性信息对应的对应关系的交点数据库;当存在经由上述交点的图像数据时,检索上述交点数据库,使用上述交点图像保持装置所保持的交点图像把该交点周围的图像进行插值的连接插值装置。
如果依据本发明,则连接插值装置当存在经过交点的图像数据时,检索交点数据库,根据该检索结果使用在交点图像保持装置中保持的交点图像把该交点周围的图像进行插值。
本发明又一方案的图像检索装置特征在于在上述方案中,还具备进行包含上述一系列图像数据的切割以及合成的编辑处理。
如果依据本发明,则图像编辑装置根据在上述地图显示装置上显示的轨迹,进行包含一系列图像数据的切割以及合成的编辑处理。
本发明又一方案的图像检索装置特征在于在上述方案中,还具备进行图像数据的抽出或者插入的图像调整装置,使得构成上述一系列图像数据的各个图像数据之间的摄影位置间隔几乎相等。
如果依据本发明,则图像调整装置进行图像数据的抽出或者插入,使得构成一系列图像数据的各个图像数据之间的摄影位置间隔几乎相等。
本发明又一方案的图像检索装置的特征在于在上述方案中,上述地图数据保持装置保持三维地图数据,上述地图显示处理装置根据上述三维地图数据,进行在上述地图显示装置上立体地显示三维地图的处理。
如果依据本发明,则地图显示处理装置在地图显示装置上立体显示根据三维地图数据的三维地图。
本发明又一方案的图像检索装置的特征在于在上述方案中,上述轨迹显示处理装置三维地位置显示上述轨迹。
如果依据本发明,则轨迹显示处理装置把在地图显示装置上显示的三维地图的显示范围内的摄影位置作为轨迹,进行三维地图上的三维位置显示。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备根据上述属性信息,进行在上述地图显示装置上显示在上述图像显示装置上显示的摄影范围的处理的摄影位置显示处理装置。
如果依据本发明,则摄影位置显示处理装置根据图像数据库内的属性信息,在上述地图显示装置上显示来自在图像显示装置上显示的摄影位置的摄影范围。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备同步处理装置,该同步处理装置与该图像相同步,在上述地图显示装置上显示与在上述图像显示装置上显示的图像的摄影位置、摄影方向和摄影角度相同的,具有三维显示的位置、方向和角度的三维立体显示。
如果依据本发明,则同步处理装置与该图像相同步,在上述地图显示装置上显示具有与在图像显示装置上显示的图像摄影位置、摄影方向和摄影角度相同的,具有三维显示的位置、方向和角度三维立体显示。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备指定上述图像显示装置的显示画面上的位置的图像位置指定装置;根据上述图像显示装置上显示的图像数据的摄影位置、摄影方向和摄影角度,计算与上述图像位置指定装置指定的位置相对应的三维位置,进行在上述地图显示装置上显示该三维位置的处理的三维位置显示处理装置。
如果依据本发明,则一旦图像位置指定装置指定图像显示装置的显示画面上的位置,则三维位置显示处理装置根据图像显示装置上显示的图像数据的摄影位置、摄影方向和摄影角度,计算与上述图像位置指定单元装置指定的位置相对应的三维位置,进行在地图显示装置上显示该三维位置的处理。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备指定上述图像显示装置的显示画面上的位置的图像位置显示装置,保持三维模型的三维模型保持装置,与上述图像显示装置上显示的图像相对应,在上述图像位置指定装置指定的位置上,把上述三维模型合成在该图像上进行显示的三维模型图像合成装置。
如果依据本发明,则一旦图像位置指定装置指定图像显示装置的显示画面上的位置,则三维模型图像合成装置与图像显示装置上显示的图像相对应,在上述图像位置指定装置指定的位置上,把三维模型合成在该图像上进行显示。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备三维模型地图合成装置,该三维模型地图合成装置根据在上述图像显示装置上显示的图像数据的摄影位置、摄影方向和摄影角度,计算与上述图像位置指定装置指定的位置相对应的三维位置,进行在上述地图显示装置显示的地图的该三维位置上把上述三维模型合成并且显示在该地图上的处理。
如果依据本发明,则三维模型地图合成装置根据在图像显示装置上显示的图像数据的摄影位置、摄影方向和摄影角度,计算与上述图像位置指定装置指定的位置相对应的三维位置,进行在上述地图显示装置显示的地图的三维位置上把上述三维模型合成并且显示在地图上的处理。
本发明又一方案的图像收集装置的特征在于具备与摄影时间一起记录所拍摄的一系列图像数据的图像记录装置;至少获得包括摄影位置和摄影时间的属性信息位置获取装置;记录通过上述位置获取装置获得的属性信息的位置时间记录装置;与由上述图像记录装置以及上述位置时间记录装置进行的记录时间相同步分别进行记录的记录控制装置。
如果依据本发明,则记录控制装置使得图像记录装置以及位置时间记录装置进行的记录时间相同步分别进行记录。
本发明的图像收集检索系统的特征在于具备一个以上的图像收集装置和与上述一个以上的图像收集装置连接的图像检索装置,其中,一个以上的图像收集装置具有与摄影时间一起记录拍摄的一系列图像数据的图像记录装置;读入上述一系列图像数据的图像读入装置;至少获得包括摄影位置和摄影时间的属性信息的位置获取装置;记录由上述位置获取装置获得的属性信息的位置时间记录装置;使上述图像记录装置以及上述位置时间记录装置进行的记录时间相同步分别进行记录的记录控制装置;进行顺序发送由上述图像读入装置读入的一系列图像数据和上述属性信息的处理的发送处理装置,图像检索装置具有进行接收从上述一个以上的图像收集装置发送来的上述一系列图像数据和上述属性信息的处理的接收处理装置;保持由上述接收处理装置接收的一系列图像数据的图像数据保持装置;保持由上述接收处理装置接收的属性信息的属性信息保持装置;根据上述摄影时间使上述图像数据保持装置中保持的一系列图像数据与上述属性信息读取装置中保持的属性信息相对应的对应装置;保持由上述对应装置对应的对应关系的图像数据库;保持地图数据的地图数据保持装置;根据上述地图数据进行在地图显示装置上显示地图数据的处理的地图显示处理装置;检索上述图像数据库的图像检索装置;由上述图像检索装置检索在上述地图显示装置上显示的在地图内具有拍摄位置的图像数据,把所检索的摄影位置在上述地图上作为轨迹进行显示的轨迹显示装置;显示上述一系列图像数据的图像显示装置;指示在上述地图显示装置上显示的地图上的位置的位置指示显示装置;从上述图像数据保持装置获取与由上述位置指示装置指示的位置附近的摄影位置相对应的图像数据并且在上述图像显示装置上再生显示的图像处理装置。
如果依据本发明,则在一个以上的图像收集装置一侧,首先,记录控制装置使图像记录装置以及位置时间记录装置进行的记录时间相同步分别进行记录。然后,发送处理装置进行把由图像读入装置从图像记录装置读入的一系列图像数据以及位置时间记录装置记录的属性信息顺序向图像检索装置一侧发送的处理。在图像检索装置一侧,接收处理装置进行接收从上述一个以上的图像收集装置发送的上述一系列图像数据和上述属性信息,在图像数据保持装置中保持一系列图像数据,在属性信息保持装置中保持属性信息。然后,对应装置根据上述摄影时间使上述图像数据保持装置中保持的一系列图像数据与上述属性信息保持装置中保持的属性信息对应,把该对应关系保持为图像数据库。地图显示处理装置根据地图数据保持装置中保存的地图数据进行在地图显示装置上显示地图数据的处理。然后,轨迹显示处理装置通过图像检索装置在上述图像数据库中检索在上述地图显示装置上显示的在地图内具有摄影位置的图像数据,把所检索的摄影位置在上述地图上显示为轨迹。然后,如果位置指示装置指示地图上的位置,则图像显示处理装置从上述图像数据保持装置获取与所指示的位置附近的摄影位置相对应的图像数据并且在图像显示装置上再生显示。
本发明又一方案的图像收集检索系统的特征在于在上述方案中,上述一个以上的图像收集装置还具备把要发送的图像数据进行抽出,调节发送的数据量的传送调节装置。
如果依据本发明,则图像调节装置把要发送的图像数据进行抽出,调节发送的数据量。
本发明又一方案的图像收集检索系统的特征在于在上述方案中,上述图像检索装置还具备时分切换从上述一个以上的图像收集装置发送的一系列图像数据以及属性信息的接收的通信目标选择装置。
如果依据本发明,则通信目标选择装置时分切换从一个以上的图像收集装置发送的一系列图像数据以及属性信息的接收。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备从上述地图数据保持装置检索与获得图像数据的摄影位置相对应的地图属性信息的地图属性检索装置,显示上述地图属性信息的地图属性信息显示装置。
如果依据本发明,则地图属性检索装置从上述地图数据保持装置检索与获得图像数据的摄影位置相对应的地图属性信息,地图属性信息显示装置显示上述地图属性信息。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备从所指示的地图属性检索二维地图上的位置的地图检索装置。
如果依据本发明,则图像数据库预先记录由地图属性检索装置检索了的地名等地图属性信息,地图检索装置根据上述地图属性信息检索二维地图上的位置,输出到位置指示装置,图像处理装置从由上述位置指示装置指示的位置再生拍摄的图像数据。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备进行图像的被拍摄物位置与摄影位置的对应的被拍摄物位置对应装置。
如果依据本发明,则被拍摄物位置对应装置进行图像的被拍摄物位置与摄影位置的对应,图像数据库保持上述对应的结果,由位置指示装置输入地图上的位置,图像处理装置根据上述对应的结果再生显示该地图上的位置被拍摄物所占有的图像。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备检测图像的被拍摄物面与收集上述一系列图像数据的图像收集装置的透镜面所构成的角度的被拍摄物角度检测装置,对于图像数据修正由上述角度引起的图像失真的图像角度修正装置。
如果依据本发明,则被拍摄物角度检测装置检测图像的被拍摄物面与收集上述一系列图像数据的图像收集装置的透镜面所构成的角度,图像角度修正装置根据上述角度,修正在该角度不是直角时引起的图像失真,图像显示装置显示修正了上述失真的图像。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备以透镜角度相对于标准方向为已知的透镜角度差收集上述一系列图像数据,修正由于上述透镜角度差引起的图像失真的图像角度修正装置。
如果依据本发明,则图像收集装置例如在把水平方向作为标准方向时,在具有已知的透镜角度差进行设定的状态下收集图像使得朝向一定角度的方向,图像角度修正装置修正由上述透镜角度引起的图像失真,图像显示装置显示修正了上述失真的图像。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备把获得图像数据的摄影位置信息在地图的道路上进行修正的轨迹位置修正装置。
如果依据本发明,则轨迹位置修正装置把摄影位置信息的摄影位置在地图的道路上的位置上进行修正,轨迹显示装置把上述被修正的摄影位置在地图上显示为轨迹。
本发明又一方案的图像检索装置的特征在于在上述方案中,上述一系列图像数据是使用鱼眼透镜得到的全周图像数据,从上述全周图像数据抽取出所指示方向的图像,修正为正立图像的图像正立修正装置。
如果依据本发明,则图像收集装置收集从具备鱼眼透镜的摄像机得到全周图像数据,图像正立修正装置从上述全周图像数据取出指示了方向的图像并且修正为正立图像,图像显示装置显示上述正立图像。
本发明又一方案的图像检索装置的特征在于在上述方案中,上述一系列图像数据是使用隔开一定距离的两个立体观测用透镜得到的立体观测图像数据,还具备在上述立体观测图像数据的每一个上实施偏振处理的偏振处理装置。
如果依据本发明,则图像收集装置收集从隔开一定距离的两个立体观测用透镜得到的立体观测图像数据,偏振处理装置对于上述立体观测图像数据实施偏振处理,图像显示装置显示上述立体观测图像。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备检测图像的被拍摄物面与收集上述一系列图像数据的图像收集装置的透镜面的距离的被拍摄物距离获取装置,对于图像数据修正由上述距离引起的图像大小的误差的图像尺寸修正装置。
如果依据本发明,则被拍摄物距离获取装置检测图像的被拍摄物面与图像收集装置的透镜面的距离,图像尺寸修正装置根据上述距离,把图像尺寸修正装置为与被拍摄物的距离取为一定时拍摄的尺寸,图像显示装置显示上述进行了尺寸修正的图像。
本发明又一方案的图像检索装置的特征在于在上述方案中,还具备从上述地图数据检测交叉点的交叉点检测装置,保持由上述交叉点检测装置检测出的交叉点数据的交叉点数据保持装置,上述图像编辑装置根据上述交点数据保持装置所保持的交叉点数据,进行上述一系列图像数据的切断处理。
如果依据本发明,则交叉点检测装置从地图数据检测交叉点,交叉点数据保持装置保持上述交叉点数据,图像编辑装置在上述交叉点进行一系列图像数据的切断。
本发明又一方案的图像收集检索系统的特征在于在上述方案中,上述图像检索装置还具备对于上述图像收集装置进行包含图像收集的开始以及结束的收集指示的收集指示装置,上述图像收集装置还具备根据上述收集指示装置的收集指示,控制该图像收集装置的图像收集控制装置。
如果依据本发明,则设置在图像检索装置中的收集指示装置进行图像数据的开始·结束等指示,通信网把上述指示传送到图像收集装置,设置在图像收集装置中的图像收集控制装置根据上述指示控制图像收集装置。
附图的简单说明
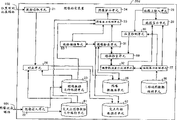
第1图是示出本发明实施形态1的图像收集检索系统结构的框图。
第2图示出第1图所示的图像数据库的数据内容。
第3图是示出第1图所示的图像检索装置进行的图像检索再生处理程序的流程图。
第4图示出显示摄影位置轨迹的地图显示单元的显示画面的一例。
第5图是示出本发明实施形态2的图像检索装置结构的框图。
第6图是示出显示了滑动条的地图显示单元的显示画面的一例。
第7图是示出本发明实施形态3的图像检索装置结构的框图。
第8图是示出第7图所示的图像检索装置进行的摄影轨迹显示处理程序的流程图。
第9图是示出路径探索单元进行的路径连接一例的说明图。
第10图是示出本发明实施形态4的图像检索装置结构的框图。
第11图是示出第10图所示的图像检索装置进行的图像检索再生处理程序的流程图。
第12图是示出交点附近的连接处理的说明图。
第13图说明保持在交点插值数据库单元中的数据内容。
第14图是示出本发明实施形态5的图像检索装置结构的框图。
第15图是示出第14图所示的图像数据装置进行的图像切断处理程序的流程图。
第16图是示出本发明实施形态6的图像检索装置结构的框图。
第17图示出第16图所示的图像调整单元进行的图像数据的抽出处理。
第18图是示出本发明实施形态7的图像检索装置结构的框图。
第19图是示出第18图所示的图像检索装置进行的图像检索再生处理程序的流程图。
第20图是示出由第18图所示的三维地图上位置显示单元进行的指定图像位置的三维地图上显示处理程序的流程图。
第21图是示出本发明实施形态8的图像检索装置结构的框图。
第22图是示出第21图所示的图像检索装置的三维模型的合成处理程序的流程图。
第23图是示出本发明实施形态9的图像收集装置结构的框图。
第24图是示出本发明实施形态10的图像收集检索系统结构的框图。
第25图是示出本发明实施形态11的图像检索装置结构的框图。
第26图说明在二维地图上的地图属性检索的状况。
第27图是示出本发明实施形态12的图像检索装置结构的框图。
第28图示出第27图所示的图像数据库单元的内容。
第29图是示出本发明实施形态13的图像检索装置结构的框图。
第30图说明在二维地图上被拍摄物位置与摄影位置的对应关系。
第31图示出第29图所示的图像数据库单元的内容。
第32图是示出本发明实施形态14的图像检索装置结构的框图。
第33图示出由被拍摄物面与透镜面的角度产生的失真的一例。
第34图示出修正了由被拍摄物面与棱镜面的角度产生的失真的一例。
第35图是示出本发明实施形态15的图像检索装置结构的框图。
第36图是示出本发明实施形态16的图像检索装置结构的框图。
第37图在二维地图上示出修正前的轨迹显示的状况。
第38图在二维地图上示出修正后的轨迹显示的状况。
第39图是示出本发明实施形态17的图像检索装置结构的框图。
第40图示出全周图像数据的一例。
第41图是示出本发明实施形态18的图像检索装置结构的框图。
第42图是示出本发明实施形态19的图像检索装置结构的框图。
第43图示出透视法的原理,说明被拍摄物图像的尺寸修正。
第44图是示出本发明实施形态20的图像检索装置结构的框图。
第45图示出预先保持对于交叉点的交叉点位置数据的二维地图数据的一部分。
第46图示出没有保持对于交叉点的交叉位置数据的二维地图数据的一部分。
第47图是示出本发明实施形态21的图像收集检索系统的结构的框图。
第48图是示出以往的图像收集检索系统结构的框图。
用于实施发明的最佳形态
以下参照附图,详细地说明本发明的图像收集装置,图像检索装置以及图像收集检索系统的最佳实施形态。
实施形态1
第1图是示出本发明实施形态1的图像收集检索系统结构的框图。在第1图中,图像收集检索系统由图像收集装置10以及图像检索装置20构成。
图像收集装置10具有由摄像机等实现的,拍摄图像的摄影记录单元11-1、11-2,各个摄影记录单元11-1、11-2在磁带等可携带记录媒体的图像记录媒体101上,与一系列图像数据一起记录摄影时间。
位置获取单元12由GPS装置实现,根据在每一秒钟从GPS用人工卫星传送来的信息获取当前位置和当前时间。方位获取单元13由判断地球的磁场检测方位的地磁场方位传感器实现,获取当前方位。方向获取单元14获取检测各摄影记录单元11-1、11-2的摄影时的摄影方向(上下左右)。角度获取单元15获取各个摄影记录单元11-1、11-2检测摄影时的摄影角度(图像角度)。
位置时间记录单元16把位置获取单元12获取的当前位置以及当前时间,方位获取单元13获取的当前方位,方向获取单元14获取的摄影方向度和角度获取单元15获取的摄影角度作为位置时间数据,记录在软盘等可携带记录媒体的位置时间记录媒体102中。位置时间记录单元16把从摄影开始到摄影结束的一系列图像数据单位的位置时间数据作为一个文件(位置时间文件F102)记录在位置时间记录媒体102中。
另一方面,图像检索装置20具有图像读入单元22。图像读入单元22读入在图像记录媒体中记录的一系列图像数据,保持在图像数据文件保持单元23中。这时,与一系列图像数据一起还保持摄影时间。该摄影时间在各摄影数据中记录了被称为摄影代码的摄影时间的代码,读入该时间代码。保持在图像数据文件保持单元23内的一系列图像数据是能够直接输出预定图像数据的数字数据。另外,把一系列图像数据单位作为一个文件(图像数据文件F101)保持一系列图像数据。同时在读入多个一系列图像数据时,各个一系列图像数据文件名不同。
对应单元24从图像数据文件保持单元23取出与从位置时间记录媒体102读取的位置时间数据的文件相对应的一系列图像等图像数据的文件,生成根据摄影时间(当前时间)把位置时间数据与一系列图像数据建立了对应关系的图像数据库,存储在图像数据库单元25中。
图像数据库单元25如第2图所示,把位置时间数据与一系列图像数据的对应关系作为表TA进行存储。在一个表TA中,存储在每一个一系列图像数据的文件(图像数据文件F101)生成的,作为一系列图像数据的文件名的图像数据文件名。把从图像数据文件的摄影开始时间经过的秒单位作为一组,作为按照时间顺序排列的图像数据库记录对应关系。即,使图像数据的摄影时间与位置时间数据的摄影时间(当前时间)一致,在图像数据库中,按照每一秒的时间顺序,记录摄影位置,经过的秒,方位,上下左右方向,角度等。
二维地图数据保持单元26保持二维地图数据,该二维地图数据与纬度以及经度的二维位置信息相关联。例如,该二维地图数据是国土管理局所发行的2500分之一的电子地图数据。地图显示单元28用CRT监视器等实现,显示并输出二维地图。地图显示处理单元27从二维地图数据保持单元26获得相对应的二维地图数据,进行在地图显示单元28上显示的处理。
地图上输入单元29由鼠标等点击设备实现,指示输入地图显示单元28的显示画面上的位置。位置检测单元30检测由地图上输入单元29指示的位置的纬度和经度的二维位置信息。
图像检索单元31进行检索图像数据库单元25内的图像数据库的处理。摄影轨迹显示处理单元32获得在地图显示单元28上显示的二维范围,在该二维范围内检索具有图像位置的图像数据,把所检索的图像位置作为轨迹在图像显示单元28上进行显示。
图像检索单元31从位置检测单元30获得由地图上输入单元29指示的位置,通过检索图像数据库单元25,获得具有最接近所指示位置的摄影位置的图像数据文件名和与摄影位置相对应的经过的秒,输出到图像显示处理单元33。
图像显示处理单元33接收图像数据文件名和与摄影位置相对应的经过的秒,从图像数据文件保持单元23获取该图像数据文件名的图像数据文件,把对应于经过的秒的图像数据以后的图像数据输出到图像显示单元34。
这里,参照第3图所示的流程图,说明图像的检索再生处理程序。在第3图中,通过图像检索装置20的电源投入,地图显示处理单元从二维地图数据保持单元26读出预定的二维地图数据,在地图显示单元28上显示输出二维地图(步骤S101)。
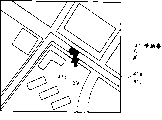
然后,轨迹显示处理单元32从地图显示处理单元27获取地图显示单元28显示的二维地图的显示范围,经过图像检索单元31从图像数据库单元25获取该显示范围内的摄影位置,把全部摄影位置在地图显示单元28上显示输出(步骤S102)。例如,第4图示出在地图显示单元28上显示的二维地图的一例,在该二维地图上,显示表示摄影位置的多个黑点(轨迹)。
然后,图像检索单元31经过位置检测单元30判断是否由地图上输入单元29指示了用于图像显示的位置(步骤S103)。地图上输入单元29例如使用第4图所示的光标39,指示轨迹C1a的附近,则位置检测单元30检测该光标39指示的位置,即二维地图上的位置,把其位置输出到图像检索单元31。
在有图像显示的指示时(步骤S103,YES),图像检索单元31检索图像数据库单元25的表,获取具有最接近光标39指示的位置的摄影位置C1a的摄影数据的图像数据文件名和与该摄影位置相对应的经过的秒,输出到图像显示处理单元33(步骤S104)。
图像显示处理单元33从图像数据文件保持单元23获取具有所输入的图像数据文件名的图像数据文件,进行在图像显示单元34上显示所输入的经过的秒以后的图像数据的处理(步骤S105),然后结束本处理。
如果依据该实施形态1,则由于分别管理由摄影记录单元11-1、11-2拍摄的一系列图像数据和由位置获取单元12获取的摄影位置,因此能够仅用一个位置获取单元12同时获取多个一系列图像数据,并且建立对应关系。另外,由于在二维地图上与二维地图的显示一起,轨迹显示处理装置32还显示摄影位置的轨迹,因此使用者能够可靠地选择指定所希望的图像数据。
实施形态2
以下,说明本发明的实施形态2。在上述的实施形态1中,轨迹C1作为黑点在二维地图上显示输出,使得使用者易于选择指定所希望的图像数据,而在本实施形态2中,在一系列图像数据的轨迹上作为使用者接口显示滑动条,使得提高所希望图像数据的选择指定的操作性。
第5图是示出本发明实施形态2的图像检索装置结构的框图。在第5图中,该图像检索装置20b代替实施形态1的摄影轨迹显示处理单元32设置了轨迹型按钮显示处理单元40。其它的结构由于与实施形态1相同,因此在相同的结构部分上标注相同的符号。其中,也可以并用摄影轨迹显示处理单元32和轨迹型按钮显示处理单元40。
轨迹型按钮显示处理单元40与摄影轨迹显示处理单元32同样,如果通过地图显示处理单元27在地图显示装置28上显示二维地图,则从地图显示处理单元27获取在地图显示单元28上显示的二维地图的显示范围。轨迹型按钮显示处理单元40如果获取二维地图的显示范围,则通过检索图像数据库单元25,获取该显示范围内的摄影位置,以各个一系列图数据单位,在二维地图上显示把该摄影位置的路径作为轨迹的滑动条41。
所谓滑动条41如第6图所示,是沿着时间顺序的摄影位置,拉伸轨道那样的两条线41a、41b,在该两条线41a、41b之间配置四角形的按钮41c,沿着两条线41a、41b所形成的轨迹,按钮41c能够自由移动的使用者接口。
滑动条41上的按钮41c配置在二维地图上,该按钮41c的位置示出所希望图像数据的开始位置。按钮41c的移动通过操作光标39的鼠标拖动与释放。
如果通过地图上输入单元29使滑动条41上的按钮41c的位置变化,则位置检测单元30检测各按钮41c的位置变化,把所变化的位置输出到图像检索单元31。图像检索单元31检索图像数据库单元25的表,获取具有按钮41c所指示位置的图像数据的图像数据文件名和与该摄影位置相对应的经过的秒,输入到图像显示处理单元33。
图像显示处理单元33从图像数据文件保持单元23获取具有所输入的图像数据文件名的图像数据文件,进行在图像显示单元34上显示所输入的经过的秒以后的图像数据的处理。
如果依据该实施形态2,则轨迹型按钮显示处理单元40由于在二维地图上显示作为指示所希望的图像开始位置的使用者接口的滑动条,因此能够可靠地指示所希望的图像开始位置。
实施形态3
以下,说明本发明的实施形态3。在上述的实施形态1中,由地图上输入单元29仅指定图像开始位置,再生该图像位置以后的图像数据,而在该实施形态3中,在二维地图上表示所指示的两个地点之间的路径的轨迹,能够沿着该路径再生从在该路径上指示的位置开始的图像数据。
第7图是示出本发明实施形态3的图像检索装置结构的框图。在第7图中,该图像检索装置20c相对于实施形态1所示的图像检索装置20,还设置路径探索单元50。其它的结构与实施形态1相同,在相同的结构部分上标注相同的符号。
路径探索单元50如果经过位置检测单元30输入了地图上输入单元29指示的始点位置与终点位置,则生成根据存在于该始点位置与终点位置之间的摄影位置的轨迹所形成的路径,在地图显示单元28上显示形成该路径的摄影位置。如果位置检测单元30指示图像的开始位置,则路径探索单元50沿着该路径再生与该位置对应的路径上的摄影位置以后的图像数据。
这里,参照第8图所示的流程图,说明由路径探索单元50进行的摄影轨迹的显示处理程序。在第8图中,地图上输入单元29在二维地图上指示要显示轨迹路径的表示路径的始点位置与终点位置。(步骤S201)。
路径探索单元50经过图像检索单元31从图像数据库单元25获取具有最接近于始点位置的摄影位置(始点对应位置)的图像数据的图像数据文件名和该摄影位置的经过的秒(步骤S202)。另外,路径探索单元50经过图像检索单元31从图像数据库单元25获取具有最接近于终点位置的摄影位置(终点对应位置)的图像数据的图像数据文件名和该摄影位置的经过的秒(步骤S203)。
然后,路径探索单元50判断具有始点对应位置的图像数据文件名与具有终点对应位置的图像数据文件名是否相同(步骤S204)。当始点对应位置与终点对应位置存在于相同的图像数据文件中时(步骤S204,YES),把从该始点对应位置到终点对应位置摄影位置输出到摄影轨迹显示处理单元32,摄影轨迹显示处理单元32在地图显示单元28上显示这些摄影位置(步骤S205),然后结束本处理。
另一方面,始点对应位置和终点对应位置没有存在于相同的图像数据文件中时(步骤S204,NO),生成连接多个图像数据文件的摄影位置的路径(步骤S206)。然后,路径探索单元50把从始点对应位置到终点对应位置路径上的摄影位置输出到摄影轨迹显示处理单元32,摄影轨迹显示处理单元32在地图显示单元28上显示这些摄影位置(步骤S207),然后结束本处理。
第9图是示出始点对应位置与终点对应位置没有存在于相同的图像数据文件中时的路径生成处理一例的说明图。在第9图中,二维地图上存在着分别具有向右下方的路径R1、R4和向左下方的路径R2、R3的4个图像数据文件。这里,在指示了始对应位置PS和终点对应位置PE时,路径探索单元50全部搜索始点对应位置PS以后的摄影位置,具有各个摄影位置和位于预定范围内的摄影位置,并且判断是否存在与路径R1的数据图像数据文件不同的图像数据文件。
在第9图中,在摄影位置P1,存在对于该摄影位置P1具有预定范围内的摄影位置路径2的图像数据文件。另外,由于摄影位置P1与预定范围内的摄影位置几乎是相同的位置,因此在预定范围内的摄影位置取为位于与摄影位置P1相同的位置。这里,路径探索单元50存储从始点对应位置PS到作为再生停止位置的摄影位置PE的摄影位置群D1。
路径探索单元50进而还全部搜索摄影位置P1以后的摄影位置,具有各摄影位置与位于预定范围内的摄影位置,而且判断是否存在其它的图像数据文件的摄影位置。作为摄影位置P1以后的图像数据文件,由于具有路径R1的图像数据文件和路径2的图像数据文件,因此对于各个图像数据文件进行处理。在路径R1的图像数据文件中,在摄影位置P4,检测路径R3的图像数据文件的摄影位置,存储从摄影位置P1到摄影位置P4的摄影位置群D5。另外,在路径2的图像数据文件中,在摄影位置P2,检测路径R4的图像数据文件的摄影位置,存储从摄影位置P1到摄影位置P2摄影位置群D2。
进而,在路径R3以及路径R4的各图像数据文件中,相互检测摄影位置P3,分别存储从摄影位置P4到摄影位置P3的摄影位置群D6和从摄影位置P2到摄影位置P3的摄影位置群D3。然后,在路径R4中,从摄影位置P3检测终点对应位置PE,存储从摄影位置P3到终点对应位置PE的摄影位置群D4。而且,路径探索单元50把所存储的摄影位置群D1~D6输出到摄影轨迹显示处理单元32。摄影轨迹显示处理单元32把摄影位置群D1~D6作为轨迹在地图显示单元28上进行显示。
这样,根据在地图显示单元28的显示画面上显示的摄影位置群D1~D6的轨迹,使用者经过地图上输入单元29,如果把该轨迹附近中的位置指示为摄影开始的位置,则选择所指示位置附近的摄影位置,再生作为该摄影位置以后的路径上的图像数据。
如果依据本实施形态3,则仅把始点对应位置与终点对应位置之间的路径上的摄影位置显示为轨迹,能够沿着路径从该路径上的任意的摄影位置再生图像数据,能够进一步地可靠而且简单地指示、再生所希望的图像数据。而且,即使在始点对应位置与终点对应位置存在于不同的图像数据文件中的情况下,也能够自动地探索路径,再生犹如连续的图像。
实施形态4
下面,说明本发明实施形态4。在上述的实施形态3中,在多个图像数据文件的摄影路径交叉时,通过连接各个图像数据文件相接近的摄影位置形成把各图像数据文件之间连接起来的摄影路径,而在本实施形态4中,使用预先拍摄的交点的图像数据把交点移动时的图像进行插值,使得顺利地再生连接了不同图像数据文件之间的交点中的图像。
第10图是示出本发明实施形态4的图像检索装置结构的框图。在第10图中,该图像检索装置20d具有把交叉点的图像数据作为交叉点图像数据文件进行保持的交叉点图像数据文件保持单元51,在每个交叉点图像数据文件中,把各图像数据的属性信息作为交点插值数据库进行管理的交点插值数据库单元52,使用交叉点图像数据把交叉点移动时的图像进行插值的连接插值单元53。其它的结构与实施形态3相同,在相同的结构部分上标注相同的符号。
交叉点图像数据文件保持单元51保持的交叉点图像数据是在多个图像数据交叉的交叉点,在交叉点的中央设置摄像机等摄影装置,固定摄影装置的视点,沿着顺时针方向使摄影装置水平旋转的同时拍摄360度全方向的图像的图像数据。从开始了摄影的录像到停止摄影的录像的期间,根据方位传感器记录摄影装置的视点的方位。通过预先记录该方位,在所拍摄的交叉点图像数据的再生时能够了解在第几秒拍摄了哪一个方位。
交点插值数据库管理交叉点图像数据文件的文件名,摄影位置,各交叉点图像数据的经过的秒和方位,该方位以北方作为0度,沿着顺时针方向,以「度」,「分」,「秒」进行记录。
连接插值单元53使用多个图像数据文件顺序再生图像数据时,至交叉点为止再生一方的图像数据文件内的图像数据,并且从该交叉点开始,再生另一方的图像数据文件内的图像数据时,插入摄影了该交叉点的交叉点图像数据,进行插值处理使得成为连续的图像。
这里,参照第11图所示的流程图,说明该实施形态4的图像检索再生处理程序。在第11图中,首先,地图显示处理单元27在地图显示单元28上显示二维地图数据保持单元26内的二维地图数据(步骤S301)。然后,由路径探索单元50探索两个地点之间的摄影路径,根据该探索结果,摄影轨迹显示处理单元32在地图显示单元28上显示表示该路径的摄影位置的轨迹(步骤S302)。
然后,路径探索单元50判断是否有根据地图上输入单元29的图像显示的指示(步骤S303),在有指示时(步骤S303,YES),通过判断其它图像数据文件的摄影位置是否存在于预定范围内,判断是否存在交点(步骤S304)。
在存在交点(步骤S304,YES)时,连接插值单元53在交点位置,进行使用交叉点图像数据把交点前后的图像数据之间进行插值的处理(步骤S305)以后,进行再生图像数据的处理(步骤S306),然后结束本处理。另一方面,在没有交点(步骤S304,NO)时,直接进行图像数据的再生处理(步骤S306),然后结束本处理。换言之,在实施形态3的图像位置P1~P4插入交叉点数据图像,作为平滑的图像数据进行再生。
这里,参照第12图以及第13图说明由连接插值单元53进行的连接插值处理。第12图是示出具有路径RX的图像数据文件的摄影位置与具有路径RY的图像数据文件的摄影位置相交叉的交点附近。具有路径RX的图像数据向右下方经过时间,具有路径RY的图像数据向左下方经过时间。
在第12图中,如果指示具有路径RX的图像数据文件内的摄影位置X1(摄影时间T1),则路径探索单元50检索摄影时间T1以后的所有摄影位置。检索在所检索的摄影位置中具有预定范围内的距离,作为其它的摄影数据文件内的摄影位置的图像位置。在第12图中,对于摄影位置X2(摄影时间T2),检索出具有预定范围内的距离,其它的路径RY的图像数据文件内的摄影位置Y1(摄影时间T11)。
进而,图像检索单元31在具有路径RX的图像数据文件中,与摄影时间T2相比较,以更早的时间,检索更接近于摄影位置X2的摄影位置X3。这里,从表示各摄影位置X3、X2的纬度和经度之差计算出从摄影位置X3观看摄影位置X2的方向的方位角,把朝向北时作为0度,把顺时针方向作为正方向,计算出为几度。该计算出的角度成为方位Xa。
另外,图像检索单元31在具有路径RY的图像数据文件中,与摄影时间T11相比较,以更早的时间,检索最接近于摄影位置Y1的摄影位置Y2。这里,从表示各摄影位置Y1、Y2纬度与经度之差计算出从摄影位置Y2观看摄影位置Y1的方向的方位角,把朝向北时作为0度,把顺时针方向作为正方向,计算出为几度。该计算出的角度成为方位Yb。
连接插值单元53检索交点插值数据库单元2,特定在摄影位置X2附近的交叉点摄影了交叉点图像数据的交叉点图像数据文件。连接插值单元53向图像显示处理单33进行指示,再生从具有路径RX的图像数据文件内的摄影位置X1到摄影位置X2的图像数据。然后,连接插值单元53再生所特定的交叉点图像数据文件内的从方位Xa到方位Xb的交叉点图像数据。进而,连接插值单元53再生具有路径RY图像数据文件内的图像数据。由此,作为从摄影位置X2到摄影位置Y1之间的图像数据,再生从第13图所示方位Xa到方位Xb的交叉点图像数据,在摄影位置X2的图像数据的再生结束时刻,连接方位Xa的交叉点图像数据,在摄影位置Y1的图像数据再生开始时刻,连接方位Xb的交叉点图像数据,不切断通过交叉点的图像,能够作为连续的图像进行再生。
另外,在从交叉点图像数据的摄影开始的方位Z0到方位Xa的经过的秒TX减去从方位Z0到方位Xb的经过的秒TY的值是正时,沿着反方向再生交叉点图像数据。另外,在交叉点图像数据的再生过程中,交叉点图像数据结束时,从相同的交叉点图像数据的起始沿着相同方向进行再生。
如果依据本实施形态4,则在交叉点连接不同的图像数据文件内图像数据时,从连接至交叉点的图像转移到离开交叉点的图像时,由于把交叉点图像数据进行插值,因此不切断经过交叉点的图像,能够作为连续的图像进行再生。
实施形态5
以下,说明本发明的实施形态5。在本实施形态5中,可以进行在图像数据文件保持单元23内保持的图像数据数据文件的切断等的编辑处理。
第14图是示出本发明实施形态5的图像检索装置结构的框图。在第14图,图像检索装置20e具有进行图像数据文件的切断等编辑处理的图像编辑单元54。其它的结构与实施形态1相同,在相同的结构部分上标注相同的符号。
这里,参照第15图所示的流程图,说明作为图像编辑单元54进行的图像编辑处理之一的切断处理的处理程序。在第15图中,首先,由地图上输入单元29指示在地图显示单元28上显示的二维地图上切断对象的图像数据文件存在的位置(步骤S401)。
然后,图像编辑单元54经过图像检索单元31,在图像数据库单元25内设定新的图像数据文件的表区域(步骤S402)。进而,图像编辑单元54经过图像检索单元31,把与切断对象的图像数据文件相对应表的切断位置以后的数据移动到与新的图像数据文件相对应的表中,添加新的图像数据文件名的同时,在所移动的数据中,把各经过的秒的值变动为减去了至切断位置为止的经过的秒的值(步骤S403)。
然后,图像编辑单元54读出与新的图像数据文件相对应的图像数据,在所读出的一系列图像数据中添加新的图像数据文件名,存储在图像数据文件保持单元23中(步骤S404)。
进而,图像编辑单元54清除原来的图像数据文件内切断位置以后的图像数据,再次进行存储(步骤S405),然后结束本处理。
如果依据本实施形态5,则由于参照在地图显示单元28上显示的轨迹,能够直接编辑处理对象的图像数据,因此能够容易而且有效地进行对于图像数据的编辑处理。
实施形态6
以下,说明本发明的实施形态6。在本实施形态6中,通过在图像数据文件保持单元23内存储的图像数据的抽出等进行调整,使得与图像数据的摄影位置的变位相对应的图像数据的再生量均匀。
第16图是示出本发明实施形态6的图像检索装置结构的框图。在第16图中,该图像检索装置20f具有进行图像数据文件保持单元23内存储的图像数据的抽出等处理,进行图像数据调整的图像调整单元55,使得与图像数据的摄影位置的变位相对应的图像数据的再生量均匀。其它的结构与实施形态1相同,在相同的结构部分上标注相同的符号。
这里,参照第17图,说明图像调整单元5进行图像数据抽出的情况。第17图(a)示出图像数据文件保持单元23内存储的一个图像数据文件的图像位置与图像时间的关系。第17图(a)所示的图像数据文件具有摄影位置P1~Pn共n个摄影位置以及与其对应的摄影数据。各个摄影位置P1~P3的摄影时间分别是摄影时间t1到tn。图像调整单元55计算出在图像数据文件内连续的摄影位置Pk~Pk+m之间的各个距离dk+1~dk+m。例如,计算出摄影位置Pk与摄影位置Pk+1之间的距离dk+1,计算出摄影位置Pk+1与摄影位置Pk+2之间的距离dk+2。然后,图像调整单元55把所计算出的距离dk+1~dk+m顺序相加。例如,最初加入距离dk+1,接着把距离dk+1与距离dk+2相加。进而,把距离dk+1~dk+3相加。这样,按照时间顺序,顺序地把dk+1~dk+m相加,在相加距离ds超过预定距离,例如5m时,留下相加后的两端的摄影位置的图像数据,清除其之间的摄影位置的图像数据。例如,在第17图(a)中,摄影位置Pk与摄影位置Pk+m之间的距离ds首次超过5m时,清除摄影位置Pk+1~Pk+m-1的图像数据(参照第17图(b))。
图像调整单元55按照时间顺序对于摄影位置P1~P进行这样的抽出处理。由此,在伴随着摄影位置的变位的摄影时间均匀,再生了图像时,能够作为以等速度移动的图像进行再生。另外,在本实施形态6中,作为图像调整的-例示出了把图像数据进行抽出的处理,但是并不限定于此,在伴随摄影位置的变位的摄影时间过短时,也可以进行把图像数据插值的处理。
如果依据本实施形态6,则由于图像调整单元55进行图像数据的抽出处理等图像调整处理,因此能够作为以等速度移动的图像进行再生的同时,由于不保持冗长的图像数据,因此能够提高存储效率。
实施形态7
以下,说明本发明的实施形态7。在上述的实施形态1~6中,每一个都是在二维地图上显示图像数据的摄影位置,而在本实施形态7中,是在三维地图上显示图像数据的摄影位置。
第18图是示出本发明实施形态7的图像检索装置结构的框图。在第18图中,该图像检索装置20g代替二维地图数据保持单元26,设置三维地图数据保持单元61。三维地图数据保持单元61保持三维地图数据。三维地图数据例如是在国土管理局发行的表示地形起伏的数值地图,或者预定地图公司发行的以矢量表现房屋的位置和高度的数据地图,或者在VRML(Virtual Reality Modeling Language)中所述的数据。这些三维地图数据是具有地形、房屋等形状以及数据内的各位置分别有经度、纬度、高度的位置信息的数据。三维地图显示处理单元62把在三维地图数据保持单元61中保持的三维地图数据进行在三维地图显示单元63上显示的处理。三维地图显示处理单元62在三维地图数据是用VRML所述的情况下,成为VRML浏览器。三维地图显示处理单元62立体地显示具有所指定的经度、纬度、高度的从试点观看的三维地图数据。如果用鼠标等地图上输入单元64指示立体地显示了三维地图数据的三维地图显示单元63的显示画面上所显示的建筑物等,则显示该建筑物等的经度、纬度、高度。
摄影轨迹立体显示处理单元69在由三维地图显示处理单元62进行的在三维地图显示单元63中显示的三维地图的显示画面上,进行包括高度在内的显示摄影位置的轨迹的处理。三维地图上位置显示单元68把摄影范围输出到三维地图显示单元63。同步处理单元66在与图像显示单元34中显示图像数据的摄影地点相同的视点位置,进行在三维地图显示单元63中立体地显示三维地图的同步处理。
图像位置指定单元70经过图像显示单元34的显示画面指定再生的图像内的建筑物等图像位置。三维地图上位置显示单元68把与由图像位置指定单元70指定的建筑物等图像位置相对应的三维位置在三维地图显示单元63的三维地图显示画面上进行显示。另外,图像数据库单元25通过除去经度、纬度以外还包含了高度的摄影位置管理三维摄影位置。另外,其结构与实施形态1相同,在相同的结构部分上标注相同的符号。
这里,参照第19图,说明由图像检索装置20g进行的图像检索再生处理程序。在第9图中,首先,三维地图显示处理单元62经过图像检索单元31从图像数据库单元25获得所有图像数据的摄影位置(步骤S501)。然后,三维地图显示处理单元62从三维地图数据保持单元61获得网罗了全部图像数据的摄影位置的三维地图数据,在三维地图显示单元63上显示三维地图(步骤S502)。然后,摄影轨迹立体显示处理单元69通过检索图像数据库单元25获得位于当前在三维地图显示单元63上显示的三维地图的显示范围内的三维摄影位置,在三维地图显示单元63显示的三维地图上显示为轨迹(步骤S503)。进而,摄影位置显示处理单元67经过图像检索单元31检索图像数据库单元25,获得与当前正在显示的各摄影位置相对应的方位、上下左右方向、角度,在三维地图上显示从各摄位置对应于摄影方向的箭头,从摄影位置与作为摄影范围的界限角度相吻合,在三维地图上显示矢线(步骤S504)。另外,矢线以显示摄影范围的特定的颜色表现。
然后,判断是否有参照了三维地图显示单元63的显示画面的轨迹的图像显示的指示(步骤S505)。在有图像显示的指示时(步骤S505,YES),图像检索单元31检索图像数据库单元25内的表,获得具有最接近于指示位置的摄影位置的图像数据的图像数据文件名以及该摄影位置的经过的秒(步骤S506)。
然后,图像显示处理单元33取出所检索的图像数据文件,在图像显示单元34中再生经过的秒以后的图像数据(步骤S507)。另一方面,同步处理单元66进行对应于再生的图像数据的摄影位置的三维地图的同步显示控制(步骤S508)。
然后,判断是否有图像的再生结束或者终止的指示(步骤S509),在没有图像的再生结束或者中止的指示时(步骤S509,NO),转移到步骤S506,进行图像的显示以及与摄影位置同步的三维地图的同步显示,在有图像的再生结束或者中止的指示时(步骤S509,YES),结束本处理。
下面,参照第20图所示的流程图,说明图像位置指定单元70指定的指定图像位置的三维地图上显示处理的处理程序。首先,三维地图位置显示单元68判断在图像显示单元34的再生过程中或者暂时停止过程中的图像显示时,图像位置指定单元是否在显示画面上指示了图像内的1点(步骤S601)。
在指示了图像内的1点时(步骤S601,YES),获得该地点的显示画面上的二维位置(步骤S602)。所谓二维位置,例如指的是以正在再生的图像的中心为「0」即原点,以至显示画面的上端为100,至下端为-100的Y轴,以至右端为100,至左端为-100的X轴的坐标上的位置。
进而,三维地图上位置显示单元68检索再生中的图像的摄影位置、方位、上下左右方向、角度,从这些属性信息和所获得的二维位置,决定三维地图上的三维位置(步骤S603)。该三维位置的决定,例如,在正在进行三维显示的地图上,描画把当前的摄影位置作为始点的矢量,把视点方向与矢量的角度作为0度,从视点方向到摄影方位的上限角度为α度,从视点方向到摄影方位的右边界角度为β度,二维位置的值是(X,Y)时,把矢量的终点以α×Y/10度朝向上方,以β×X/100度向右方倾斜地显示。该矢量朝向的目标成为与在显示画面上所指示的位置相对应的三维地图上的位置。然后,三维地图上位置显示单元68把所决定的三维位置在三维地图显示单元63的显示画面上显示为标记(步骤S604),然后结束本处理。
如果依据本实施形态7,则由于在三维地图上显示图像数据的轨迹,因此能够更容易进行图像数据的指示。另外,由于使再生图像与三维地图显示同步,因此能够把握直观的而且立体的摄影范围。进而,如果指示再生图像内的所希望的位置,则在三维地图上显示与该位置相对应的位置,因此能够可靠而且容易地确认图像内的建筑物等。
实施形态8
下面,说明本发明的实施形态8。在该实施形态8中,能够把三维模型合成在再生图像中,或者合成在三维地图中。
第21图是示出本发明实施形态8的图像检索装置结构的框图。在第21图中,该图像检索装置20h具有三维模型数据保持单元71,对图像三维模型合成单元72以及对三维地图三维模型保持单元73。其它的结构与实施形态7相同,在相同的部分上标注相同的符号。
在第21图中,三维模型数据保持单元71例如保持表示实现建筑物的立方体那样三维形状的三维模型数据。该三维模型是计算机绘图(CG)模型。对图像三维模型合成单元72在由图像位置指定单元70指定的图像位置合成并显示三维模型。对三维地图三维模型合成单元73在与由图像位置指定单元70指定的图像位置相对应的三维位置合成三维模型,在三维地图显示单元36中进行显示。
这里,参照第22图所示的流程图,说明三维模型的合成处理。在第22图中,首先预先决定要显示的三维模型(步骤S701)。然后,对图像三维模型合成单元72判断图像位置指定单元70是否在图像显示单元34的显示画面上指定了图像位置(步骤S702)。在指定了图像位置(步骤S702,YES)时,对图像三维模型合成单元72获得在图像画面上所指定的图像位置的二维位置(步骤S703)。所谓二维位置,指的是例如在以正在再生的图像的中心为「0」即原点,至显示画面的上端为100,至下端为-100的Y轴,至右端为100,至左端为-100的X轴的坐标上的位置。
然后,对图像三维模型合成单元72从三维模型数据保持单元71获得要合成的三维模型数据,在所指定的图像位置,合成该三维图像模型,并且进行显示(步骤S704),把所指定的图像位置的二维位置输出到对三维地图三维模型合成单元73。
对三维地图三维模型合成单元73根据图像数据库单元25内的属性信息和所输入的二维位置,决定与所指定的图像位置相对应的三维地图上的三维位置(步骤S705)。而且,在三维地图上的三维位置,合成三维模型,在三维地图显示单元63上进行显示(步骤S706),然后结束本处理。
另外,对图像三维模型合成单元72或者对三维地图三维模型合成单元73在图像显示单元34的图像或者三维地图显示单元63中合成三维模型时,把三维模型的大小以及图像变形后合成。
如果依据本实施形态8,则在正在再生图像的所希望的位置以及与该所希望的位置相对应的三维地图上,合成并显示所希望的三维模型,因此能够使用仅以三维模型不能够表现的实际空间的图像,能够创造更真实的图像。
实施形态9
以下,说明本发明的实施形态9。在上述的实施形态1中,人为地进行由摄影记录单元11-1、11-2进行的图像的摄影记录开始与由位置时间记录单元16进行的位置以及时间记录开始的同步,而在本实施形态9中,自动地进行图像的摄影记录开始与位置以及时间的记录开始的同步。
第23图是示出本发明实施形态9的图像收集装置结构的框图。在第23图中,该图像收集装置10b具有记录控制单元80,其它的结构与实施形态1所示的图像收集装置10的结构相同,在相同的部分上标注相同的符号。
在第23图中,记录控制单元80连接在摄影记录单元11-1、11-2以及位置时间记录单元16上,通过摄影开始的输入,在摄影记录单元11-1、11-2以及位置时间记录单元16上同时输出记录开始的指示,对于各个摄影记录单元11-1、11-2以及位置时间记录单元16开始进行记录。
如果依据本实施形态9,则由于能够自动地使图像的摄影记录开始与位置时间的记录开始相同步进行记录,不存在图像记录与位置时间记录的时间偏移,能够进行精度高的图像数据处理。
实施形态10
以下,说明本发明的实施形态10。在上述的实施形态1~9中,每一个都使图像收集装置与图像检索装置电气上独立,经过图像记录媒体101-1、101-2以及位置时间记录单元媒体102,在图像检索装置中输入图像数据和位置时间数据,管理为具有摄影位置等属性信息的图像数据,进行检索显示,而在本实施形态10中,能够几乎实时地检索显示同时摄影的一个以上的图像数据。
第24图是示出本发明实施形态10的图像收集检索系统结构的框图。在第24图中,该图像收集检索系统90具有与通信网N连接的多个图像收集装置91-1~91-n以及图像检索装置110。
各个图像收集装置91-1~91-n的记录控制单元80与实施形态9相同,进行由摄影记录单元11进行的摄影记录与位置时间记录单元16进行的位置时间记录单元的同步控制。另外,位置时间记录单元16与实施形态1~9相同,记录由使用了6PS的位置获取单元12获取的位置时间数据。
图像读入单元92把由摄影记录单元11记录的图像读入为电子数字数据,作为图像数据保持在图像数据保持单元93中。另一方面,由位置时间记录单元16记录的位置时间数据保持在位置时间数据保持单元95中。
通信处理单元94经过通信网N,进行把图像数据保持单元93以及位置时间数据保持单元95中顺序保持的图像数据以及位置时间数据传送到图像检索装置110一侧的通信处理。传送调节单元96根据来自图像检索装置110一侧的指示,调节传送的数据量。
另一方面,图像检索装置110去除了实施形态1所示的图像检索装置20中的数据读取单元21,图像读入单元22,而新添加有保持位置时间数据的位置时间记录单元112,经过通信网N在进行图像收集装置91-1~91-n之间的通信处理的通信处理单元111,以及进行时分切换在进行各个图像收集装置91-1~91-n之间的通信时的通信目标的选择的通信目标选择单元113。其它的结构与实施形态1所示的图像检索装置20相同,在相同的部分上标注相同的符号。
图像处理单元111经过通信网N,接收从各个图像收集装置91-1~91-n输入的图像数据和位置时间数据,分别存储在图像数据文件保存单元23以及位置时间记录单元112中。图像数据以及位置时间数据分别在各个图像收集装置91-1~91-n中添加不同的文件名进行保存。这是因为各个图像收集装置91-1~91-n摄影的图像数据具有相同的摄影时间。保持在位置时间记录单元112中的位置时间数据和保持在图像数据文件保持单元23中的图像数据在各个图像数据文件中根据摄影时间相对应,相对应的属性信息作为图像数据库保持在图像数据库单元25中。这时的对应从具有以前的摄影时间的图像数据顺序地进行。
在通信处理单元111接收的数据量多,不能够把所有的数据传送到位置时间记录单元112以及图像数据文件保持单元23中的情况下,对于所对应的图像收集装置91-1~91-n,通知数据传送的延迟。接收到该数据传送延迟通知的图像收集装置91-1~91-n的传送调节单元96以预定的停止时间,例如1秒,停止数据传送,在1秒钟以后再生开始进行传送新的图像数据的数据传送。即,传送调节单元96通过进行抽出一定时间的图像数据的处理,调节传送的数据量。
如果依据本实施形态10,则能够实时地获得从多个图像收集装置91-1~91-n传送来的图像数据以及位置时间数据,在图像检索装置110一侧能够始终实时地确认最新的图像和该图像的摄影位置。
实施形态11
以下,说明本发明的实施形态11。在上述的实施形态1中,在地图显示单元28上显示摄影轨迹,在图像显示单元34上显示从该摄影位置摄影的图像,而并没有在画面上的一定位置显示摄影位置的地名等地图属性信息。在本实施形态11中,对应于摄影位置获得地名等地图属性信息,在与图像显示单元34相邻接的画面上的一定位置进行显示。
第25图是示出本发明实施形态11的图像检索装置结构的框图。在第25图中,该图像检索装置20i在摄影轨迹显示处理单元32获得了在地图显示单元28上显示的二维范围以后,把该二维范围的信息输出到地图属性检测单元131。地图属性检测单元131从二维地图数据保持单元26检索存在于该二维范围中的地图属性信息输出到地图属性显示单元132。地图属性显示单元132显示该地图属性信息。通过把地图属性显示单元132配置在与图像显示单元34相邻接的一定的位置,在一定的画面上的位置显示地名等地图属性信息。其它的结构与实施形态1相同,在相同的结构部分上标注相同的符号。
这里,参照第26图,说明地图属性检测单元131检测地图属性的情况。第26图表示二维地图信息。该二维地图信息保持市町村或者街区的边界信息201,作为其边界内的地图属性信息的属性名202,属性名显示中心位置203,而没有保持地图上任意地点的地图属性信息。
在提供从摄影轨迹显示处理单元32获得的二维范围的中心204时,地图属性检测单元131检索最接近于其二维范围的中心204的而且在没有跨过边界信息201的范围内具有属性名显示中心位置203的属性名202,把其作为地图属性信息输出到地图属性显示单元132。
实施形态12
以下,说明本发明的实施形态12。在上述的实施形态11中,在地图属性显示单元132中显示地名地图属性,而没有检索显示把该地名作为摄影位置的图像。在本实施形态12中,通过预先在图像数据库单元25中保持地图属性信息,再生显示摄影位置与该地图属性信息相当的位置的图像。
第27图是示出本发明实施形态12的图像检索装置结构的框图。在第27图中,该图像检索装置201的图像数据库单元25a把在地图属性检测单元131中检测的地图属性信息与摄影位置信息保持为一个组。地图检索单元133从图像数据库单元25a检索与地图属性的文字序列一致的摄影位置信息输出到图像检察单元31。图像检索单元31把与该地图属性信息相当的摄影位置信息输出到图像显示单元34,图像显示单元34再生显示该位置的图像。其它的结构与实施形态11相同,在相同的结构部分上标注相同的符号。
第28图示出本发明的实施形态12具备的图像数据库单元25的表TA的内容。图像数据库单元25a由于保持第28图中所示的地图属性信息,因此把地图属性信息作为键,能够检索具有该摄影位置的图像。
实施形态13
以下,说明本发明的实施形态13。在上述的实施形态1中,由地图上输入单元29指示地图上的摄影位置,在图像显示单元34中再生显示图像,而并没有指示地图上房屋等被拍摄物的所处位置,再生显示该被拍摄物。在本实施形态13中,进行图像中的被拍摄物位置与摄影位置的对应,通过在地图上指示被拍摄物存在的位置,再生显示该图像。
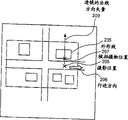
第29图是示出本发明实施形态13的图像检索位置结构的框图。在第29图中,该图像检索装置20k的数据读取单元21把读取的图像摄影位置的数据不仅输出到对应单元24,而且还输出到被拍摄物位置对应单元141。被拍摄物位置对应单元141使用保持在二维地图数据保持单元26中的二维地图信息,计算被拍摄物位置以及图像收集装置10的行进方向,输出到图像数据库单元25b。
图像数据库单元25b与在本发明实施形态1中所述的信息一起记录被拍摄物位置信息以及行进方向。地图上输入单元29输入被拍摄物位置,输出到位置检测单元30。位置检测单元30经过图像检索单元31,检索处于该被拍摄物位置的图像,输出到图像显示处理单元33。图像显示单元34显示处于该被拍摄物位置的图像。其它的结构与实施形态1相同,在相同的结构部分上标注相同的符号。
这里,参照第30图,说明被拍摄物位置对应单元141获得被拍摄物位置与摄影位置对应的方法。第30图表示二维地图信息,描绘了作为成为被拍摄物的房屋的外形线205。通过用图像数据库单元25b的摄影时间信息,把时刻t1与时间t2=t1+Δt的各个摄影位置信息进行比较,计算图像收集装置10的行进方向。图像收集装置的透镜方向由于预先对于行进方向206例如定为沿着左方向为90度,因此被拍摄物位置207成为从摄影位置208的某处出发的透镜的法线方向矢量209与房屋的外形线205在最接近于透镜的位置相交的位置。这样,能够获得被拍摄物位置207与摄影位置208的对应。
第31图示出本发明的实施形态13具备的图像数据库单元25b的表TA的内容。图像数据库单元25b由于保持第31图所示的被拍摄物位置信息和行进方向,因此把被拍摄物位置作为键,从图像数据库单元25b检索具有接近该被拍摄物位置的被拍摄物位置信息,能够检索具有该摄影位置的图像。
实施形态14
以下,说明本发明的实施形态14。在上述的实施形态13中,在图像显示单元34中显示被拍摄物图像,而由于被拍摄物的壁面与透镜面构成的角度没有限定为直角,因此图像的被拍摄物的壁面不一定朝向真正的面。在本实施形态14中,检测图像的被拍摄物面与透镜构成的角度,在显示时修正由于该角度引起的失真,显示被拍摄物的壁面朝向真正的面的图像。
第32图是示出本发明实施形态14的图像检索装置结构的框图。在第32图中,该图像检索装置201的被拍摄物位置对应单元141在实施形态13中说明过的被拍摄物位置信息的基础上,求房屋的外形线250内最接近于摄影位置的线与图像收集装置10的行进方向构成的角度,进而保持在图像数据库单元25b中。
另外,图像检索装置201根据在实施形态13中说明过的动作,在图像显示处理单元33中处理与某个被拍摄物体相对应的图像数据,把上述图像数据输出到图像角度修正单元142。图像角度修正单元142修正由于在图像数据库单元25b中保持的上述角度引起的图像的失真,把修正了失真的图像输出到图像显示单元34。其它的结构与实施形态13相同,在相同的结构部分上标注相同的符号。
这里,参照第33图以及第34图,说明图像角度修正单元142修正由于角度引起的图像的失真。第33图表示透镜面与被拍摄物面不平行时产生的梯形失真。该梯形失真根据透镜面与被拍摄物体面的角度而一定。从而,修正该梯形能够得到修正了第34图所示那样失真的图像。另外,这时,除去该壁面以外还将发生由于修正引起的新的图像失真,然而由于在这里只是着眼于该壁面,因此能够忽视其它部分的失真。
实施形态15
以下,说明本发明的实施形态15。在上述的实施形态14中在每个图像的各画面上,在图像显示单元34显示进行了角度修正的被拍摄物图像,而通过透镜面的配置,有时要修正的角度遍及全部图像为一定,这时,不能够有效地计算出在各个画面要修正的角度。在本实施形态15中,对于图像总体修正从透镜面与水平方向具有一定的已知角度差而设置的图像收集装置10得到的图像所具有的失真。
第35图是示出本发明实施形态15的图像检索装置结构的框图。在第35图中,该图像检索装置20m的图像角度修正单元142对于从图像显示处理单元33得到的图像,修正由于已知的透镜角度差引起的图像的失真,输出到图像显示单元34。图像角度修正单元142的动作与在本发明的实施形态14中说明过的相同,而要修正的角度在事前设定。
另一方面,位置检测单元30把摄影位置信息还输出到被拍摄物角度检测单元143。被拍摄物角度检测单元143从图像数据库单元25b,检索对于摄影位置的被拍摄物位置以及图像收集装置10的行进方向,从其行进方向计算出图像收集装置10的透镜面的角度。进而,被拍摄物角度检测单元143检测对于该摄影位置的与保持在二维地图数据保持单元26中的被拍摄物位置相当的房屋外形线信息,检测透镜面与被拍摄物面构成的角度,输出到图像角度修正单元142。
图像角度修正单元142对于从图像显示处理单元33得到的图像数据,修正由上述的角度引起的图像的失真,输出到图像显示单元34。其它的结构与实施形态1相同,在相同的结构部分上标注相同的符号。由此,在图像检索装置20m中,能够修正由于被拍摄物与透镜的角度引起的图像的失真,能够检索显示图像。
实施形态16
以下,说明本发明的实施形态16。在上述的实施形态1中,在地图显示单元28中显示摄影轨迹,而该摄影轨迹由于是接收GPS信号而决定的信号,因此由于GPS信号接收时的误差等,从实际的摄影位置偏离,在地图上不一定载入到拍摄了图像的道路上。在本实施形态16中,根据地图上的道路信息等,在地图显示单元28中在道路上修正并显示轨迹。
第36图是示出本发明实施形态16的图像检索装置结构的框图。在第36图中,该图像检索装置20n的数据读取单元21把所读取的图像摄影位置的数据不像实施形态1那样输出到对应单元24,而是输出到轨迹位置修正单元151。轨迹位置修正单元151根据位于二维地图数据保持单元26中的二维地图,在道路上修正图像摄影位置信息,把修正了的摄影位置信息数据输出到对应单元24。其它的结构与实施形态1相同,在相同的结构部分上标注相同的符号。
这里,参照第37图以及第38图,说明轨迹位置修正单元151修正轨迹位置方法的一例。第37图表示二维地图信息和在其上面的修正前的轨迹211,第38图表示二维地图信息和在其上面的修正后的轨迹212。
修正前的轨迹211在没有位于二维地图的道路上时,探索最接近的道路上的点,在其距离没有达到预先确定的阈值时,向轨迹211a,211b那样,自动地修正到其道路上的点212a,212b。另外,在其距离达到预先确定的阈值以上时,在地图显示单元28上显示其状态的二维地图信息和修正前的轨迹211c,等待操作者的修正动作,操作者使用地图上输入单元29把轨迹修正为212c。另外,自动修正了的轨迹212b的位置如果操作者从周围的状况判断为出错时,操作者使用地图上输入单元29,能够把轨迹修正为212d。这样,能够修正没有位于道路上的轨迹位置。
实施形态17
以下,说明本发明的实施形态17。在上述的实施形态1中,图像收集装置10的透镜方向是单一方向,为了把包括前后左右的全周方向进行摄影,需要设置多台图像收集装置。在本实施形态17中,由于设置装备了鱼眼透镜的图像收集装置,因此用一台图像收集装置就能够进行全周方向的摄影。
第39图是示出本发明实施形态17的图像检索装置结构的框图。在第39图中,该图像检索装置20o的图像收集装置10o由于在透镜中安装了鱼眼透镜,因此获得全周方向的图像,把全周方向的图像保持在图像数据文件保持单元23中,根据来自地图上输入单元29的指示输出到图像显示处理单元33。
另一方面,地图上输入单元29不仅输入指示图像摄影位置的信息,而且还输入指示显示方向,图像正立修正单元152在从图像显示处理单元33中得到的全周方向图像中,把位于所指示的显示方向的图像部分修正为正立图像,输出到图像显示单元34。其它的结构与实施形态1相同,在相同的结构部分上标注相同的符号。
这里,参照第40图,说明图像正立修正部分152修正图像的方法一例。第40图是全周方向的图像例。在全周方向的图像上,嵌入在地图上输入单元29指示的方向中的区域成为扇形图像221。该扇形图像222的形状由于一定,因此把该图像进行比例分配,展开成长方形的形状,能够得到正立图像222。
实施形态18
以下,说明本发明的实施形态18。在上述的实施形态1中,图像收集装置10的透镜方向是单一方向,得到的图像限定于用单眼观察情景的情况。在本实施形态18中,由于设置装备了隔开一定距离的2个立体观测用透镜的图像收集装置,因此可以得到立体观测情景的图像。
第41图是示出本发明实施形态18的图像检索装置结构的框图。在第41图中,该图像检索装置20p的图像收集装置10p从隔开一定距离的2个立体观测用透镜收集立体观测图像数据,该立体观测图像保持在图像数据文件保持单元23中,根据来自地图上输入单元29的指示输出到图像显示处理单元33。
图像显示处理单元33对于2个立体观测图像数据的每一个起到实施形态1叙述的功能,把立体观测图像数据输出到偏振处理单元153。偏振处理单元153对于立体观测图像数据分别实施纵·横的偏振处理,然后输出到图像显示单元34,图像显示单元34把2个立体观测图像数据合并进行显示。其它的结构与实施形态1相同,在相同的部分上标注相同的符号。由此,使用了立体观测用的偏振眼镜的观察者能够眺望图像显示单元34的图像进行立体观察。
实施形态19
以下,说明本发明的实施形态19。在上述的实施形态13中,在图像显示单元34中显示被拍摄物图像,而被拍摄物的壁面与透镜面的距离不是一定,被拍摄物图像的大小与实际的被拍摄物的大小不成比例。在本实施形态19中,检测图像的被拍摄物面与透镜的距离,在显示时修正由于该距离的引起的图像的大小,使得显示与被拍摄物的大小成比例的图像。
第42图是示出本发明实施形态19的图像检索装置结构的框图。在第42图中,该图像收集装置10q的被拍摄物距离获取单元17获取从透镜位置到被拍摄物面的距离,记录在位置时间记录单元16中。该距离记录在位置时间记录单元16中,进而,由数据读取单元21读取,保持在图像数据库单元25b中。
另外,图像检索装置20q根据在实施形态13中说明过的动作,在图像显示处理单元33中处理与某个被拍摄物对应的图像数据,把该图像数据输出到图像尺寸修正单元144。图像尺寸修正单元144根据在图像数据库单元25b中保持的距离,把被拍摄物图像的视觉上的尺寸修正为被拍摄物位于一定距离的尺寸。其它的结构与实施形态13相同,在相同的结构部分上标注相同的符号。
该被拍摄物距离获取单元17例如是使用了激光器的测距装置,与透镜面一致,设置在图像收集装置10q中,沿着与透镜方向相同的方向照射激光,通过测定来自壁面的激光反射,计测与被拍摄物相当的壁面的距离。
这里,参照第43图,说明图像尺寸修正装置单元144修正因距离引起的图像尺寸的误差。第43图示出透视法的原理。在第43图中,在宽度为D的被拍摄物的图像上的宽度d与距离L成反比。从而,为了把被拍摄物的图像上的宽度修正为距离L0下的宽度d0,在距离为L1时,放大或者缩小图象使得图像上的宽度d1成为d*L1/L0。这样,能够修正图像尺寸的误差。另外,这时,该被拍摄物壁面以外将发生由于修正引起的新的图像尺寸的误差,然而由于在这里仅着眼于壁面,因此可以忽视其它的图像尺寸的误差。
实施形态20
以下,说明本发明的实施形态20。在上述的实施形态中,可以进行图像数据文件的切断等编辑处理,但是存在着需要操作者通过地图上输入单元29每次指定作为进行切断等位置的道路的交叉点这样的问题。在本实施形态20中,通过事先从二维地图信息检测、保持交叉点数据,由此对于交叉点能够自动地进行图像数据文件的切断的编辑处理。
第44图是示出本发明实施形态20的图像检索装置结构的框图。在第44图中,该图像检索装置20r的交叉点检测单元154使用在二维地图数据保持单元26中保持的二维地图信息检测交叉点,交叉点数据保持单元155保持该交叉点的位置等交叉点数据。图像编辑单元54经过图像检索单元31,对于图像摄影位置检测交叉点数据保持单元155,在该摄影位置处于上述的交点附近时,自动地进行图像的切断等编辑处理。其它的结构与实施形态5相同,在相同的部分上标注相同的符号。
这里,参照第45图,说明交叉点检测单元154检测交叉点的一例。第45图是预先保持着对于所有的交叉点中心215的交叉点位置数据的二维地图数据的一部分。交叉点检测单元154根据二维地图数据在地图显示单元28上显示所有的交叉点,通过操作者从地图上输入单元29仅指示与图像相关联的交叉点,检测与图像编辑有关的交叉点。
这里,参照第46图,说明交叉点检测单元154检测交叉点的其它例子。第46图是保持了道路边缘216的数据但是没有保持对于交叉点的交叉点位置数据的二维地图数据的一部分。交叉点检测单元154根据二维地图数据在地图显示单元28上表示道路边缘,通过操作者从地图上输入单元29指示与图像相关联的交叉点,能够检测与图像编辑有关的交叉点。
实施形态21
以下,说明本发明的实施形态21。在上述的实施形态10中,例如把图像收集装置91设置在汽车上,把图像检索装置10例如设置在办公室等中,把两者隔开设置,而且能够实时地在图像检索装置的设置场所确认由图像收集装置91收集的图像,但是图像数据的开始·结束等控制需要从图像检索装置110的设置场所经过人工向位于图像收集装置91一侧的操作者进行指示。在本实施形态21中,从图像检索装置110一侧进行图像数据的开始·结束等控制。
第47图是示出本发明实施形态21的图像收集检索系统结构的框图。在第47图中,该图像检索装置110a的收集指示单元161经过通信处理单元111,把对于图像收集装置的图像收集的开始·结束等操作者的指示输出到通信网,通信网把该收集指示从图像检索装置110a传送到图像收集装置91a。
图像收集装置91a的图像收集控制单元162经过通信处理单元94接收指示,根据该指示,进行向摄影记录单元11,记录控制单元80,传送调节单元96等传送图像收集的开始·结束等的指示的控制。其它的结构与实施形态10相同,在相同的部分上标注相同的符号。由此,能够从图像检索装置10a一侧进行图像收集装置91a的控制。
如以上说明的那样,如果依据本发明,则首先,图像读入装置与摄影时间一起读入所记录的一系列的图像数据,把该一系列的图像数据保持在图像数据保持装置中。然后,对应装置使用属性信息读取装置,读取包含至少取得了上述一系列图像数据的拍摄位置与摄影时间的属性信息,根据摄影时间进行上述图像数据保持装置所保持的一系列的图像数据的对应,把该对应关系作为图像数据库,保持在图像数据库单元中。另一方面,地图显示处理装置根据保持在地图数据保持装置中的地图数据在地图显示装置上进行显示地图数据的处理。然后,轨迹显示处理装置由图像检索装置在上述图像数据库内检索在上述地图显示装置中显示的地图内具有拍摄位置的图像数据,把所检索的拍摄位置在上述地图上显示为轨迹。然后,如果位置指示装置指示地图上的位置,则图像显示处理装置从上述图像数据保持装置获取与所指示的位置附近的拍摄位置相对应的图像数据,在图像显示装置中进行再生显示,因此,起到能够减轻在所希望的图像数据的再生显示时花费的时间和劳力的效果。
如果依据以下的发明,则使得上述属性信息中包摄影方位、摄影方向、摄影角度或者把它们组合起来的信息,使得把这些信息保持为图像数据库,因此,起到能够有效利用图像数据库的效果。
如果依据以下的发明,则轨迹型按钮显示处理装置通过图像检索装置检索在地图显示装置上显示的具有地图内的摄影位置的一系列的图像数据,并且在上述地图上显示把所检索的一系列的图像数据的各个摄影位置连接起来的路径以及沿着该路径滑动,指示图像数据的再生开始位置输入用按钮构成的滑动条,通过地图上输入装置使该输入用按钮滑动,指示图像数据的图像开始位置,因此,起到能够可靠而且柔性地进行所希望的图像数据的检索再生的同时,能够提高所希望的图像数据的检索再生的操作性这样的效果。
如果依据以下的发明,则路径探索装置由上述图像检索装置检索表示由位置指示装置所指示的位置开始与位置结束这两个位置之间所存在的一系列的图像数据,生成经过了该一系列图像数据所表示的摄影位置的上述两个位置之间的路径,在上述地图显示装置上显示该路径上的摄影位置的轨迹,并且如果由上述位置指示装置指示摄影位置,则显示该摄影位置以后的上述路径上的图像数据,因此,起到能够减轻在所希望的图像数据的检索再生时花费的时间和劳力的效果。
如果依据以下的发明,则图像处理装置在上述两个位置之间的路径上存在着多个一系列的图像数据时,自动地连接并且再生显示该路径的图像数据,因此,起到能够格外地减轻在所希望的图像数据的再生显示时花费的时间和劳力的效果。
如果依据以下的发明,则连接插值装置当存在经过交点的图像数据时,检索交点数据库,根据该检索结果使用在交点图像保持装置中保持的交点图像把该交点周围的图像进行插值,因此,在连接处理经过交点的图像数据时,能够起到作为不切断的一系列图像数据进行再生显示的效果。
如果依据以下的发明,则图像编辑装置根据在上述地图显示装置上显示的轨迹,进行包含一系列图像数据的切割以及合成的编辑处理,因此,能够起到可靠而且迅速地进行图像的编辑处理的效果。
如果依据本发明,则图像调整装置进行图像数据的抽出或者插入,使得构成一系列图像数据的各个图像数据之间的摄影位置间隔几乎相等,因此,能够作为以等速度移动的均匀的图像进行再生显示,还由于可以不存在无用图像的视听因而具有能够进行有效的图像的再生,同时能够提高存储效率的效果。
如果依据以下的发明,则地图显示处理装置在地图显示装置上立体显示根据三维地图数据的三维地图,因此,起到能够直观地把握摄影位置确认的效果。
如果依据以下的发明,则轨迹显示处理装置把在地图显示装置上显示的三维地图的显示范围内的摄影位置作为轨迹,进行三维地图上的三维位置显示,因此,起到能够容易地把握摄影位置周围的位置关系的效果。
如果依据以下的发明,则摄影位置显示处理装置根据图像数据库内的属性信息,在上述地图显示装置上显示来自在图像显示装置上显示的摄影位置的摄影范围,因此,由于显示图像数据的摄影范围,所以能够更容易地进行所希望的图像数据的检索再生。
如果依据以下的发明,则同步处理装置与该图像相同步,在上述地图显示装置上显示具有与在图像显示装置上显示的图像摄影位置、摄影方向和摄影角度相同的,具有三维显示的位置、方向和角度的三维立体显示,因此,起到能够容易地把握再生图像的摄影位置关系的效果。
如果依据以下的发明,则如果图像位置指定装置指定图像显示装置的显示画面上的位置,则三维位置显示处理装置根据图像显示装置上显示的图像数据的摄影位置、摄影方向和摄影角度,计算与上述图像位置指定单元装置指定的位置相对应的三维位置,进行在地图显示装置上显示该三维位置的处理,因此,起到能够容易地把握再生图像内的建筑物等图像要素的位置关系的效果。
如果依据以下的发明,则如果图像位置指定装置指定图像显示装置的显示画面上的位置,则三维模型图像合成装置与图像显示装置上显示的图像相对应,在上述图像位置指定装置指定的位置上,把三维模型合成在该图像上进行显示,因此,起到能够更现实地把握添加了三维模型时的图像变化的效果。
如果依据以下的发明,则三维模型地图合成装置根据在图像显示装置上显示的图像数据的摄影位置、摄影方向和摄影角度,计算与上述图像位置指定装置指定的位置相对应的三维位置,进行在上述地图显示装置显示的地图的三维位置上把上述三维模型合成在地图上并且显示的处理,因此起动能够通过由三维模型地图合成装置合成了三维模型的三维地图确认由三维模型图像合成装置合成了三维模型的图像的效果。
如果依据以下的发明,则记录控制装置使得图像记录装置以及位置时间记录装置进行的记录时间相同步分别进行记录,因此,起到能够自动地进行图像记录与位置时间记录单元同步,能够生成精度高的图像数据库的效果。
如果依据以下的发明,则在一个以上的图像收集装置一侧,首先,记录控制装置使图像记录装置以及位置时间记录装置进行的记录时间相同步分别进行记录。然后,发送处理装置进行把由图像读入装置从图像记录装置读入的一系列图像数据以及位置时间记录装置记录的属性信息顺序向图像检索装置一侧发送的处理。在图像检索装置一侧,接收处理装置进行接收从上述一个以上的图像收集装置发送的上述一系列图像数据和上述属性信息,在图像数据保持装置中保持一系列图像数据,在属性信息保持装置中保持属性信息。然后,对应装置根据上述摄影时间使上述图像数据保持装置中保持的一系列图像数据与上述属性信息保持装置中保持的属性信息对应,把该对应关系保持为图像数据库。地图显示处理装置根据地图数据保持装置中保存的地图数据进行在地图显示装置上显示地图数据的处理。然后,轨迹显示处理装置通过图像检索装置在上述图像数据库中检索在上述地图显示装置上显示的在地图内具有摄影位置的图像数据,把所检索的摄影位置在上述地图上显示为轨迹。然后,如果位置指示装置指示地图上的位置,则图像显示处理装置从上述图像数据保持装置获取与所指示的位置附近的摄影位置相对应的图像数据并且在图像显示装置上再生显示,因此,起到能够在图像检索装置一侧几乎实时地确认一个以上的图像收集装置摄影的图像的效果。
如果依据以下的发明,则图像调节装置把要发送的图像数据进行抽出,调节发送的数据量,因此,起到能够使发送的图像数据的数据量均匀,能够始终实时地再生最新图像的效果。
如果依据以下的发明,则通信目标选择装置时分切换从一个以上的图像收集装置发送的一系列图像数据以及属性信息的接收,因此,起到能够实时地再生一个以上的图像收集装置摄影的图像的效果。
如果依据以下的发明,则地图属性检索装置从上述地图数据保持装置检索与获得图像数据的摄影位置相对应的地图属性信息,地图属性信息显示装置显示上述地图属性信息,因此,起到能够在图像上添加地名等地图属性进行显示的效果。
如果依据以下的发明,则图像数据库预先记录由地图属性检索装置检索了的地名等的地图属性信息,地图检索装置根据上述地图属性信息检索二维地图上的位置,输出到位置指示装置,图像处理装置从由上述位置指示装置指示的位置再生拍摄的图像数据,因此,起到能够检索显示在具有地名等地图属性的位置摄影的图像数据的效果。
如果依据以下的发明,则被拍摄物位置对应装置进行图像的被拍摄物位置与摄影位置的对应,图像数据库保持上述对应的结果,由位置指示装置输入地图上的位置,图像处理装置根据上述对应的结果再生显示该地图上的位置被拍摄物所占有的图像,因此,起到能够指定被拍摄物的位置,检索显示摄影了该被拍摄物的摄影数据的效果。
如果依据以下的发明,则被拍摄物角度检测装置检测图像的被拍摄物面与收集上述一系列图像数据图像收集装置的透镜面所构成的角度,图像角度修正装置根据上述角度,修正在该角度不是直角时引起的图像失真,图像显示装置显示修正了上述失真的图像,因此,起到能够指定被拍摄物的位置,并且对于拍摄了被拍摄物的图像数据,能够在修正了与被拍摄物具有的透镜面所构成的角度引起的失真后进行检索显示的效果。
如果依据以下的发明,则图像收集装置例如在把水平方向作为标准方向时,在具有已知的透镜角度差进行设定的状态下收集图像,使得朝向一定角度的方向,图像角度修正装置修正由上述透镜角度引起的图像失真,图像显示装置显示修正了上述失真的图像,因此,起到能够把在沿着市内街道行走过程中,以拍摄高层建筑为目的而把透镜设定为以一定角度朝向上方的图像收集装置所得到的图像修正为犹如从水平方向得到的图像那样以后,进行检索显示的效果。
如果依据以下的发明,则轨迹位置修正装置把摄影位置信息的摄影位置在地图的道路上的位置上进行修正,轨迹显示装置把上述被修正的摄影位置在地图上显示为轨迹,因此,起到即使在GPS接收机不能够接收正确的摄影位置而指示了道路以外的场所的情况下,也能够在道路上修正并显示摄影位置的效果。
如果依据以下的发明,则图像收集装置收集从具备鱼眼透镜的摄像机得到全周图像数据,图像正立修正装置从上述全周图像数据取出指示了方向的图像并且修正为正立图像,图像显示装置显示上述正立图像,因此,起到能够从一台图像收集装置获得任意方向都没有失真的图像,进行检索显示的效果。
如果依据以下的发明,则图像收集装置收集从隔开一定距离的两个立体观测用透镜得到的立体观测图像数据,偏振处理装置对于上述立体观测图像数据实施偏振处理,图像显示装置显示上述立体观测图像,因此起到佩戴了立体观测用偏振眼镜的观看者能够立体观测图像的效果。
如果依据以下的发明,则被拍摄物距离获取装置检测图像的被拍摄物面与图像收集装置的透镜面的距离,图像尺寸修正装置根据上述距离,把图像尺寸修正为与被拍摄物的距离取为一定时拍摄的尺寸,图像显示装置显示上述进行了尺寸修正的图像,因此,起到能够指定被拍摄物的位置,修正由于被拍摄物与透镜面的距离引起的尺寸误差,检索显示拍摄了被拍摄物的图像数据的效果。
如果依据以下的发明,则交叉点检测装置从地图数据检测交叉点,交叉点数据保持装置保持上述交叉点数据,图像编辑装置在上述交叉点进行一系列图像数据的切断,因此,起到能够通过事前指定交叉点,在图像编辑过程中在该交叉点自动地进行图像数据的切断的效果。
如果依据以下的发明,则设置在图像检索装置中的收集指示装置进行图像数据的开始·结束等指示,通信网把上述指示传送到图像收集装置,设置在图像收集装置中的图像收集控制装置根据上述指示控制图像收集装置,因此,起到位于图像检索装置一侧的操作者能够直接进行图像数据的开始·结束等的控制指示的效果。
产业上的可利用性
如以上那样,如果依据本发明的图像收集装置,图像检索装置以及图像收集检索系统,则适用于收集拍摄了室外,室内,海底,地下,上空,宇宙等各种空间的图像,使收集的图像与摄影位置相对应进行检索、再生、编辑的图像收集装置,图像检索装置以及图像收集检索系统。
Claims (22)
1.一种图像检索装置,特征在于具备:
读取包括一系列图像数据和每个图像数据的摄影时间的图像数据文件的图像读入单元;
保持由上述图像读入单元读入的图像数据文件的图像数据文件保持单元;
读取包括获得上述图像数据文件的拍摄位置及其摄影时间的属性信息的属性信息读取单元;
根据上述摄影时间使得保持在上述图像数据文件保持单元中的图像数据与由上述属性信息读取单元读取的属性信息相对应的对应单元;
保持由上述对应单元确定的对应关系的图像数据库单元;
保持地图数据的地图数据保持单元;
根据上述地图数据在地图显示单元上显示地图数据的地图显示处理单元;
检索上述图像数据库单元的图像检索单元;
由上述图像检索单元检索在上述地图显示单元中显示的地图内具有拍摄位置的图像数据文件,把所检索的拍摄位置在上述地图上作为拍摄轨迹进行显示的轨迹显示处理单元;
播放上述图像数据文件的图像显示单元;
指示在上述地图显示单元上显示的地图上的位置的位置指示单元;
从上述图像数据文件保持单元获取与由上述位置指示单元指示的位置附近的拍摄位置相对应的图像数据文件,并且在上述图像显示单元中播放所产生的图像数据的图像处理单元。
2.如权利要求1中所述的图像检索装置,特征在于:
上述属性信息还包括摄影方位,摄影方向,摄影角度或者把它们组合起来的信息。
3.如权利要求1或2中所述的图像检索装置,特征在于:
上述轨迹显示处理单元还具备通过上述图像检索单元检索在上述地图显示单元中显示的具有地图内摄影位置的一系列的图像数据,在上述地图上显示把所检索的一系列的图像数据的各个摄影位置连接起来的路径以及沿着该路径滑动,表示图像数据的再生开始位置的输入按钮组成的滑动条的轨迹型按钮显示处理单元。
4.如权利要求1或2中所述的图像检索装置,特征在于:
还具备路径检索单元,该路径检索单元由上述图像检索单元检索存在于表示由上述位置指示单元指示了摄影开始与摄影结束的两个位置之间所存在的一系列的图像数据,生成经过了由该一系列的图像数据表示的摄影位置的上述两个位置之间的路径,在上述地图显示单元上显示该路径上的摄影位置的轨迹,如果由上述位置指示单元指示了摄影位置,则显示该摄影位置以后的上述路径上的图像数据。
5.如权利要求1或2中所述的图像检索装置,特征在于还具备:
保持拍摄了一系列图像数据相交叉的交点周围的交点图像的交点图像保持单元;
保持上述交点图像与该交点图像的属性信息对应的对应关系的交点数据库;
当存在经过上述交点的图像数据时,检索上述交点数据库,使用上述交点图像保持单元所保持的交点图像把该交点周围的图像进行插值的连接插值单元。
6.如权利要求1或2中所述的图像检索装置,特征在于:
还具备进行包含上述一系列的图像数据的切割以及合成的编辑处理的图像编辑单元。
7.如权利要求1或2中所述的图像检索装置,特征在于:
还具备进行图像数据的消去或者插入的图像调整单元,使得构成上述一系列图像数据的各个图像数据之间的摄影位置间隔相等。
8.如权利要求1或2中所述的图像检索装置,特征在于:
上述地图数据保持单元保持三维地图数据,上述地图显示处理单元根据上述三维地图数据,进行在上述地图显示单元上立体地显示三维地图的处理。
9.如权利要求1或2中所述的图像检索装置,特征在于:
还具备根据上述属性信息,进行在上述地图显示单元上显示在上述图像显示单元上显示的摄影范围的处理的摄影位置显示处理单元。
10.如权利要求1或2中所述的图像检索装置,特征在于还具备:
从上述地图数据保持单元检索与获得图像数据的摄影位置相对应的地图属性信息的地图属性检索单元;
显示上述地图属性信息的地图属性信息显示单元。
11.如权利要求10中所述的图像检索装置,特征在于:
还具备基于所指示的地图属性检索二维地图上的位置的地图检索单元。
12.如权利要求1或2中所述的图像检索装置,特征在于:
还具备进行图像的被拍摄物位置与摄影位置的对应的被拍摄物位置对应单元。
13.如权利要求12中所述的图像检索装置,特征在于还具备:
检测图像的被拍摄物面与收集上述一系列图像数据的图像收集单元的透镜面所构成的角度的被拍摄物角度检测单元;
对于图像数据修正由上述角度引起的图像失真的图像角度修正单元。
14.如权利要求1或2中所述的图像检索装置,特征在于:
以透镜角度对于基准方向为已知的透镜角度差收集上述一系列图像数据,还具备修正由于上述透镜角度差引起的图像失真的图像角度修正单元。
15.如权利要求1或2中所述的图像检索装置,特征在于:
上述一系列图像数据是使用鱼眼透镜得到的全周图像数据,
还具备从上述全周图像数据抽取出指示方向的图像,修正为正立图像的图像正立修正单元。
16.如权利要求1或2中所述的图像检索装置,特征在于:
上述一系列图像数据是使用隔开一定距离的两个立体观测用透镜得到的立体观测图像数据,
还具备在上述立体观测图像数据的每一个上实施偏振处理的偏振处理单元。
17.如权利要求12中所述的图像检索装置,特征在于还具备:
检测图像的被拍摄物面与收集上述一系列图像数据的图像收集单元的透镜面的距离的被拍摄物距离获取单元;
对于图像数据修正由上述距离引起的图像大小的差异的图像尺寸修正单元。
18.如权利要求6中所述的图像检索装置,特征在于还具备:
从上述地图数据检测交叉点的交叉点检测单元;
保持由上述交叉点检测单元检测出的交叉点的数据的交叉点数据保持单元,
上述图像编辑单元根据上述交点数据保持单元所保持的交叉点数据,进行上述一系列图像数据的切割处理。
19.一种图像收集检索系统,特征在于;
具备至少一个图像收集装置和与上述至少一个图像收集装置连接的图像检索装置,
其中,
所述至少一个的图像收集装置具有
与摄影时间一起记录拍摄的一系列图像数据的图像记录单元;
读入上述一系列图像数据的图像读入单元;
获得至少包括摄影位置和摄影时间的属性信息的位置获取单元;
记录由上述位置获取单元获得的属性信息的位置时间记录单元;
使上述图像记录单元以及上述位置时间记录单元进行的记录操作与各自的记录时间相同步地进行的记录控制单元;
进行顺序发送由上述图像读入单元读入的一系列图像数据和上述属性信息的处理的发送处理单元,
所述图像检索装置具有
进行接收从上述至少一个图像收集装置发送来的上述一系列图像数据和上述属性信息的处理的接收处理单元;
保持由上述接收处理单元接收的一系列图像数据的图像数据保持单元;
保持由上述接收处理单元接收的属性信息的属性信息保持单元;
根据上述摄影时间使上述图像数据保持单元中保持的一系列图像数据与上述属性信息保持单元中读取的属性信息相对应的对应单元;
保持由上述对应单元确定的对应关系的图像数据库;
保持地图数据的地图数据保持单元;
根据上述地图数据进行在地图显示单元上显示地图数据的处理的地图显示处理单元;
检索上述图像数据库的图像检索单元;
由上述图像检索单元检索在上述地图显示单元上显示的在地图内具有拍摄位置的图像数据,把所检索的摄影位置在上述地图上作为轨迹进行显示的轨迹显示处理单元;
显示上述一系列图像数据的图像显示单元;
指示在上述地图显示单元上显示的地图上的位置的位置指示单元;
从上述图像数据保持单元获取与由上述位置指示单元指示的位置附近的摄影位置相对应的图像数据并且在上述图像显示单元上再生显示所产生的图像数据的图像处理单元。
20.如权利要求19中所述的图像收集检索系统,特征在于:
上述至少一个图像收集装置还具备消去要发送的图像数据,以便调节发送的数据量的传送调节单元。
21.如权利要求19或20中所述的图像收集检索系统,特征在于:
上述图像检索装置还具备以时分方式切换从上述至少一个图像收集装置发送的一系列图像数据以及属性信息的接收的通信目标选择单元。
22.如权利要求19或20中所述的图像收集检索系统,特征在于:
还具备对于上述图像收集装置进行包含图像收集的开始以及结束的收集指示的收集指示单元,
上述图像收集装置还具备根据上述收集指示单元的收集指示,控制该图像收集装置的图像收集控制单元。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP23173/2000 | 2000-01-31 | ||
| JP23173/00 | 2000-01-31 | ||
| JP2000023173 | 2000-01-31 | ||
| JP2000172659A JP2001290820A (ja) | 2000-01-31 | 2000-06-08 | 映像収集装置、映像検索装置および映像収集検索システム |
| JP172659/2000 | 2000-06-08 | ||
| JP172659/00 | 2000-06-08 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1366765A CN1366765A (zh) | 2002-08-28 |
| CN1187972C true CN1187972C (zh) | 2005-02-02 |
Family
ID=26584578
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB018007635A Expired - Fee Related CN1187972C (zh) | 2000-01-31 | 2001-01-29 | 图像收集装置,图像检索装置以及图像收集检索系统 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6950535B2 (zh) |
| EP (1) | EP1173014A4 (zh) |
| JP (1) | JP2001290820A (zh) |
| CN (1) | CN1187972C (zh) |
| WO (1) | WO2001058153A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107018318A (zh) * | 2015-11-18 | 2017-08-04 | 财团法人多次元智能It融合系统 | 低功耗无线相机及传感器系统 |
Families Citing this family (94)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6895126B2 (en) | 2000-10-06 | 2005-05-17 | Enrico Di Bernardo | System and method for creating, storing, and utilizing composite images of a geographic location |
| US6904160B2 (en) * | 2000-10-18 | 2005-06-07 | Red Hen Systems, Inc. | Method for matching geographic information with recorded images |
| JP4208487B2 (ja) * | 2002-05-29 | 2009-01-14 | キヤノン株式会社 | 情報処理装置及び位置の表示方法 |
| WO2003107146A2 (en) | 2002-06-18 | 2003-12-24 | Wink Interactive, Llc | Method, apparatus and system for management of information content for enhanced accessibility over wireless communication networks |
| JP2004032131A (ja) * | 2002-06-24 | 2004-01-29 | Canon Inc | 撮像装置及び画像処理装置 |
| JP4092976B2 (ja) * | 2002-08-05 | 2008-05-28 | ソニー株式会社 | ガイドシステム、コンテンツサーバ、及び情報処理プログラム |
| US20040183915A1 (en) * | 2002-08-28 | 2004-09-23 | Yukita Gotohda | Method, device, and program for controlling imaging device |
| JP2004104429A (ja) * | 2002-09-09 | 2004-04-02 | Canon Inc | 画像記録装置及びその制御方法 |
| CN100407782C (zh) * | 2002-09-27 | 2008-07-30 | 富士胶片株式会社 | 相册制作方法及其装置 |
| CN100391248C (zh) * | 2002-09-27 | 2008-05-28 | 富士胶片株式会社 | 相册制作方法及其装置 |
| US20040192343A1 (en) * | 2003-01-28 | 2004-09-30 | Kentaro Toyama | System and method for location annotation employing time synchronization |
| JP2004265396A (ja) * | 2003-02-13 | 2004-09-24 | Vingo:Kk | 映像生成システム及び映像生成方法 |
| JP4677175B2 (ja) * | 2003-03-24 | 2011-04-27 | シャープ株式会社 | 画像処理装置、画像撮像システム、画像表示システム、画像撮像表示システム、画像処理プログラム、及び画像処理プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| KR100801827B1 (ko) * | 2004-01-26 | 2008-02-11 | 닛본 덴끼 가부시끼가이샤 | 영상 종류 판정 시스템, 영상 가공 시스템과 그 서버 및 단말기, 영상 가공 방법 및 영상 가공 프로그램을 기록한 컴퓨터로 판독 가능한 기록 매체 |
| US7349567B2 (en) * | 2004-03-05 | 2008-03-25 | Electro Scientific Industries, Inc. | Method and apparatus for determining angular pose of an object |
| CA2559726C (en) | 2004-03-24 | 2015-10-20 | A9.Com, Inc. | System and method for displaying images in an online directory |
| JP4177779B2 (ja) * | 2004-03-31 | 2008-11-05 | 富士フイルム株式会社 | 画像表示制御装置および方法ならびに画像表示制御装置を制御するプログラム |
| US7805024B2 (en) * | 2004-05-05 | 2010-09-28 | Nokia Corporation | Method and apparatus to provide efficient multimedia content storage |
| JP4488804B2 (ja) * | 2004-06-23 | 2010-06-23 | 株式会社トプコン | ステレオ画像の関連付け方法及び3次元データ作成装置 |
| JP2006179984A (ja) * | 2004-12-20 | 2006-07-06 | Fuji Photo Film Co Ltd | 撮像システム及び撮像方法 |
| JP4649980B2 (ja) | 2004-12-21 | 2011-03-16 | ソニー株式会社 | 画像編集装置、画像編集方法、プログラム |
| US8045007B2 (en) * | 2004-12-24 | 2011-10-25 | Fujifilm Corporation | Image capturing system and image capturing method |
| GB2424730A (en) * | 2005-03-29 | 2006-10-04 | Matthew Emmerson Allen | Storage of road side images and retrieval through a map interface |
| US7353034B2 (en) | 2005-04-04 | 2008-04-01 | X One, Inc. | Location sharing and tracking using mobile phones or other wireless devices |
| JP4751886B2 (ja) | 2005-07-19 | 2011-08-17 | 富士通株式会社 | 画像判定方法 |
| TW200806027A (en) * | 2005-11-11 | 2008-01-16 | Sony Corp | Imaging/reproducing device |
| JP2007135069A (ja) * | 2005-11-11 | 2007-05-31 | Sony Corp | 撮像再生装置 |
| JP2007135068A (ja) * | 2005-11-11 | 2007-05-31 | Sony Corp | 撮像再生装置 |
| KR100735564B1 (ko) * | 2005-12-02 | 2007-07-04 | 삼성전자주식회사 | 정보 매핑 장치, 시스템, 및 방법 |
| JP4606318B2 (ja) * | 2005-12-05 | 2011-01-05 | 富士通株式会社 | 映像メタデータ補正装置及びプログラム |
| JP4708203B2 (ja) * | 2006-02-08 | 2011-06-22 | パイオニア株式会社 | 地理情報表示装置及び地理情報表示プログラム |
| CN100507917C (zh) * | 2006-02-24 | 2009-07-01 | 佳能株式会社 | 图像处理设备、图像处理方法以及服务器及其控制方法 |
| JP2009533723A (ja) * | 2006-03-28 | 2009-09-17 | イーエムシー コーポレイション | 記憶システムからコンテンツを転送するための方法および装置 |
| JP5176311B2 (ja) * | 2006-12-07 | 2013-04-03 | ソニー株式会社 | 画像表示システム、表示装置、表示方法 |
| JP2008160631A (ja) * | 2006-12-26 | 2008-07-10 | Funai Electric Co Ltd | 携帯機器 |
| US8351657B2 (en) * | 2006-12-29 | 2013-01-08 | Nokia Corporation | Method for the viewing of visual information with an electronic device |
| US20080263592A1 (en) * | 2007-04-18 | 2008-10-23 | Fuji Xerox Co., Ltd. | System for video control by direct manipulation of object trails |
| US20080309762A1 (en) * | 2007-06-12 | 2008-12-18 | Richie Howard | In-vehicle mobile digital video surveillance recorder system with GPS visual mapping and navigation |
| KR101362764B1 (ko) * | 2007-07-02 | 2014-02-14 | 삼성전자주식회사 | 사진 파일 제공 장치 및 방법 |
| JP4752827B2 (ja) | 2007-09-04 | 2011-08-17 | ソニー株式会社 | 地図情報表示装置、地図情報表示方法、及びプログラム |
| JP5186903B2 (ja) * | 2007-11-30 | 2013-04-24 | ソニー株式会社 | 地図表示装置と地図表示方法および撮像装置 |
| WO2009086194A2 (en) * | 2007-12-19 | 2009-07-09 | Nevins David C | Apparatus, system, and method for organizing information by time and place |
| EP2076055B1 (en) * | 2007-12-27 | 2012-10-24 | Saab AB | Method for displaying a virtual image |
| US8270666B2 (en) | 2008-02-12 | 2012-09-18 | Certusview Technologies, Llc | Searchable electronic records of underground facility locate marking operations |
| CA2707246C (en) | 2009-07-07 | 2015-12-29 | Certusview Technologies, Llc | Automatic assessment of a productivity and/or a competence of a locate technician with respect to a locate and marking operation |
| US8532342B2 (en) | 2008-02-12 | 2013-09-10 | Certusview Technologies, Llc | Electronic manifest of underground facility locate marks |
| US8672225B2 (en) | 2012-01-31 | 2014-03-18 | Ncr Corporation | Convertible barcode reader |
| JP5176605B2 (ja) * | 2008-03-05 | 2013-04-03 | 朝日航洋株式会社 | 映像検索装置 |
| US8280631B2 (en) | 2008-10-02 | 2012-10-02 | Certusview Technologies, Llc | Methods and apparatus for generating an electronic record of a marking operation based on marking device actuations |
| TWI661723B (zh) * | 2008-08-08 | 2019-06-01 | 日商尼康股份有限公司 | 攜帶資訊機器及資訊取得系統 |
| KR100955483B1 (ko) * | 2008-08-12 | 2010-04-30 | 삼성전자주식회사 | 3차원 격자 지도 작성 방법 및 이를 이용한 자동 주행 장치의 제어 방법 |
| JP5338228B2 (ja) * | 2008-09-29 | 2013-11-13 | カシオ計算機株式会社 | 画像生成装置、及びプログラム |
| JP5206445B2 (ja) * | 2009-01-26 | 2013-06-12 | 株式会社ニコン | 動画表示装置、プログラムおよび撮像装置 |
| US20100198690A1 (en) * | 2009-02-02 | 2010-08-05 | Michael Gilvar | Event information tracking and communication tool |
| US8902251B2 (en) | 2009-02-10 | 2014-12-02 | Certusview Technologies, Llc | Methods, apparatus and systems for generating limited access files for searchable electronic records of underground facility locate and/or marking operations |
| US8572193B2 (en) | 2009-02-10 | 2013-10-29 | Certusview Technologies, Llc | Methods, apparatus, and systems for providing an enhanced positive response in underground facility locate and marking operations |
| JP4770960B2 (ja) * | 2009-03-30 | 2011-09-14 | カシオ計算機株式会社 | 画像検索システム及び画像検索方法 |
| JP2011009846A (ja) * | 2009-06-23 | 2011-01-13 | Sony Corp | 画像処理装置、画像処理方法及びプログラム |
| WO2011071872A1 (en) | 2009-12-07 | 2011-06-16 | Certusview Technologies, Llc | Methods, apparatus, and systems for facilitating compliance with marking specifications for dispensing marking material |
| US8611652B2 (en) | 2009-12-16 | 2013-12-17 | Red.Com, Inc. | Resolution based formatting of compressed image data |
| JP2011128005A (ja) * | 2009-12-17 | 2011-06-30 | Fujitsu Ten Ltd | ナビゲーション装置、車載表示システム及び地図表示方法 |
| JP4968320B2 (ja) * | 2009-12-25 | 2012-07-04 | カシオ計算機株式会社 | 情報取得装置、位置情報記憶方法及びプログラム |
| CA2815998C (en) | 2010-08-11 | 2016-09-13 | Certusview Technologies, Llc | Methods, apparatus and systems for facilitating generation and assessment of engineering plans |
| CN102377982A (zh) * | 2010-08-25 | 2012-03-14 | 深圳市捷视飞通科技有限公司 | 一种在线视频系统及其视频图像采集方法 |
| JP5682241B2 (ja) * | 2010-09-15 | 2015-03-11 | カシオ計算機株式会社 | 再生表示装置、撮影装置、再生表示方法およびプログラム |
| JP5838560B2 (ja) * | 2011-02-14 | 2016-01-06 | ソニー株式会社 | 画像処理装置、情報処理装置、及び撮像領域の共有判定方法 |
| JP6135508B2 (ja) * | 2011-08-11 | 2017-05-31 | 株式会社ニコン | データ記録装置及び画像記録装置 |
| CN103108154A (zh) * | 2011-11-14 | 2013-05-15 | 辉达公司 | 一种汽车导航设备 |
| CN103369229B (zh) * | 2012-03-28 | 2016-07-06 | 宏碁股份有限公司 | 多装置的同步摄影方法及系统 |
| US8737691B2 (en) * | 2012-07-05 | 2014-05-27 | Verizon Patent And Licensing Inc. | Methods and systems for creating virtual trips from sets of user content items |
| US9092455B2 (en) | 2012-07-17 | 2015-07-28 | Microsoft Technology Licensing, Llc | Image curation |
| JP5958228B2 (ja) * | 2012-09-21 | 2016-07-27 | 株式会社Jvcケンウッド | 映像情報提供装置及び方法 |
| JP5974782B2 (ja) * | 2012-09-28 | 2016-08-23 | 株式会社Jvcケンウッド | 映像生成装置、経路映像生成方法 |
| US9846025B2 (en) * | 2012-12-21 | 2017-12-19 | Wabtec Holding Corp. | Track data determination system and method |
| US9091628B2 (en) | 2012-12-21 | 2015-07-28 | L-3 Communications Security And Detection Systems, Inc. | 3D mapping with two orthogonal imaging views |
| JP6028700B2 (ja) * | 2013-09-27 | 2016-11-16 | 株式会社Jvcケンウッド | 映像連結再生装置、映像連結再生方法、映像連結再生プログラム |
| US9640223B2 (en) | 2014-03-27 | 2017-05-02 | Tvu Networks Corporation | Methods, apparatus and systems for time-based and geographic navigation of video content |
| JP6299492B2 (ja) * | 2014-07-03 | 2018-03-28 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| US10592080B2 (en) | 2014-07-31 | 2020-03-17 | Microsoft Technology Licensing, Llc | Assisted presentation of application windows |
| US10678412B2 (en) | 2014-07-31 | 2020-06-09 | Microsoft Technology Licensing, Llc | Dynamic joint dividers for application windows |
| US10254942B2 (en) | 2014-07-31 | 2019-04-09 | Microsoft Technology Licensing, Llc | Adaptive sizing and positioning of application windows |
| US9836464B2 (en) | 2014-07-31 | 2017-12-05 | Microsoft Technology Licensing, Llc | Curating media from social connections |
| CN104363422B (zh) * | 2014-11-13 | 2017-08-29 | 国家电网公司 | 基于视频监测的输电线路覆冰预警系统 |
| JP2017034638A (ja) * | 2015-08-06 | 2017-02-09 | 富士通テン株式会社 | 画像処理装置および画像処理方法 |
| CN105117455A (zh) * | 2015-08-18 | 2015-12-02 | 北京奇虎科技有限公司 | 沿途目标图片搜索方法、终端及系统 |
| US9702722B2 (en) * | 2015-09-26 | 2017-07-11 | Volkswagen Ag | Interactive 3D navigation system with 3D helicopter view at destination |
| JP2017146347A (ja) * | 2016-02-15 | 2017-08-24 | 大日本印刷株式会社 | 表示装置及び表示システム |
| JP6584978B2 (ja) * | 2016-02-24 | 2019-10-02 | 京セラ株式会社 | 電子機器、制御装置、制御プログラム及び表示方法 |
| US10311551B2 (en) | 2016-12-13 | 2019-06-04 | Westinghouse Air Brake Technologies Corporation | Machine vision based track-occupancy and movement validation |
| JP2019135605A (ja) * | 2018-02-05 | 2019-08-15 | 株式会社amuse oneself | 撮影映像表示装置及び撮影映像表示方法 |
| DE102018208512A1 (de) * | 2018-05-29 | 2019-12-05 | Siemens Aktiengesellschaft | Kalibrierungsverfahren und Kalibrierungssystem für eine Bahnfahrzeugkamera und Bahnfahrzeug mit Bahnfahrzeugkamera |
| US20230119032A1 (en) * | 2020-01-24 | 2023-04-20 | Nippon Telegraph And Telephone Corporation | Display system and display method |
| JP7509409B2 (ja) | 2020-07-20 | 2024-07-02 | 日本電気通信システム株式会社 | 処理装置、処理方法、及び制御プログラム |
| WO2023162267A1 (ja) * | 2022-02-28 | 2023-08-31 | パイオニア株式会社 | 表示装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2896930B2 (ja) * | 1989-01-16 | 1999-05-31 | コールズ,クリストファー・フランシス | 写真保安システム |
| JPH07248726A (ja) * | 1994-03-14 | 1995-09-26 | Toshiba Corp | Gps利用位置映像データ収集装置およびその再生装置 |
| US5802492A (en) * | 1994-06-24 | 1998-09-01 | Delorme Publishing Company, Inc. | Computer aided routing and positioning system |
| EP0720125B1 (fr) * | 1994-12-29 | 2002-05-08 | Koninklijke Philips Electronics N.V. | Dispositif de formation d'image et procédé pour effectuer des corrections de distorsions optiques géométriques dans une image |
| JPH0998323A (ja) * | 1995-09-29 | 1997-04-08 | Matsushita Electric Ind Co Ltd | ビデオカメラ |
| JP3658659B2 (ja) * | 1995-11-15 | 2005-06-08 | カシオ計算機株式会社 | 画像処理装置 |
| JP3742141B2 (ja) * | 1996-03-15 | 2006-02-01 | 株式会社東芝 | 画像記録再生装置、画像再生装置 |
| JPH10308917A (ja) * | 1997-05-06 | 1998-11-17 | Nippon Samusun Kk | 位置情報記録機能付き録画再生装置 |
| AU7705498A (en) * | 1997-05-29 | 1998-12-30 | Red Hen Systems Llc | Gps video mapping system |
| US6215914B1 (en) * | 1997-06-24 | 2001-04-10 | Sharp Kabushiki Kaisha | Picture processing apparatus |
| US6342917B1 (en) * | 1998-01-16 | 2002-01-29 | Xerox Corporation | Image recording apparatus and method using light fields to track position and orientation |
| JPH11250396A (ja) * | 1998-02-27 | 1999-09-17 | Hitachi Ltd | 車両位置情報表示装置および方法 |
| JPH11259502A (ja) * | 1998-03-11 | 1999-09-24 | Mitsubishi Electric Corp | 映像情報表示装置 |
| JPH11272164A (ja) | 1998-03-20 | 1999-10-08 | Hitachi Software Eng Co Ltd | 地図動画像情報リンクシステム |
| US6504571B1 (en) * | 1998-05-18 | 2003-01-07 | International Business Machines Corporation | System and methods for querying digital image archives using recorded parameters |
| JP2000339923A (ja) | 1999-05-27 | 2000-12-08 | Mitsubishi Electric Corp | 映像収集装置および映像収集方法 |
-
2000
- 2000-06-08 JP JP2000172659A patent/JP2001290820A/ja active Pending
-
2001
- 2001-01-29 CN CNB018007635A patent/CN1187972C/zh not_active Expired - Fee Related
- 2001-01-29 WO PCT/JP2001/000566 patent/WO2001058153A1/ja active Application Filing
- 2001-01-29 EP EP01949080A patent/EP1173014A4/en not_active Withdrawn
- 2001-01-29 US US09/937,559 patent/US6950535B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107018318A (zh) * | 2015-11-18 | 2017-08-04 | 财团法人多次元智能It融合系统 | 低功耗无线相机及传感器系统 |
| CN107018318B (zh) * | 2015-11-18 | 2020-07-14 | 财团法人多次元智能It融合系统 | 低功耗无线相机及传感器系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001290820A (ja) | 2001-10-19 |
| EP1173014A1 (en) | 2002-01-16 |
| WO2001058153A1 (fr) | 2001-08-09 |
| US6950535B2 (en) | 2005-09-27 |
| CN1366765A (zh) | 2002-08-28 |
| EP1173014A4 (en) | 2008-03-19 |
| US20020154213A1 (en) | 2002-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1187972C (zh) | 图像收集装置,图像检索装置以及图像收集检索系统 | |
| CN1110943C (zh) | 图像拾取系统和图像拾取设备 | |
| CN1210543C (zh) | 传感器校准装置及方法、程序、信息处理方法及装置 | |
| CN1132123C (zh) | 计算深度信息的方法和使用深度信息进行图象处理的方法 | |
| CN1174255C (zh) | 故障点定位系统 | |
| CN1214614C (zh) | 图像处理方法、图像处理装置及记录媒体 | |
| CN1193606C (zh) | 摄影图象检索装置、电子照相装置和摄影图象检索方法 | |
| CN1220161C (zh) | 图像取入装置和方法 | |
| CN1272959C (zh) | 追加信息摄像方法以及使用该方法的摄像装置 | |
| CN1132750C (zh) | 驾驶操作辅助器及记录媒体 | |
| CN1412525A (zh) | 图像显示装置 | |
| CN1829321A (zh) | 信息处理的方法和装置 | |
| CN1659418A (zh) | 摄像机校正装置 | |
| CN1788497A (zh) | 立体视觉图像处理装置、立体视觉图像提供方法及图像显示方法 | |
| CN1683905A (zh) | 车载用导行系统 | |
| CN1815409A (zh) | 系统、图像处理装置及信息处理方法 | |
| CN1086865C (zh) | 信息发送方法和接收方法 | |
| CN101064777A (zh) | 命令系统及设备、成像设备及方法、命令处理方法及程序 | |
| CN1950863A (zh) | 便携式导航终端及其程序 | |
| CN1577331A (zh) | 文件管理程序、管理方法及其装置、摄像装置及记录媒体 | |
| CN1802678A (zh) | 图像服务器、图像获取设备以及图像显示终端 | |
| CN1788188A (zh) | 拍摄图像显示方法 | |
| CN1856113A (zh) | 显示设备、方法、程序以及记录介质和复合图像显示设备 | |
| CN1643939A (zh) | 立体图像处理方法及装置 | |
| CN1165950A (zh) | 导向设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20050202 Termination date: 20100129 |