CN101628362B - 激光切割自动上下料机械手 - Google Patents
激光切割自动上下料机械手 Download PDFInfo
- Publication number
- CN101628362B CN101628362B CN 200910184072 CN200910184072A CN101628362B CN 101628362 B CN101628362 B CN 101628362B CN 200910184072 CN200910184072 CN 200910184072 CN 200910184072 A CN200910184072 A CN 200910184072A CN 101628362 B CN101628362 B CN 101628362B
- Authority
- CN
- China
- Prior art keywords
- bracing frame
- gear
- suction cup
- blanking
- cup carrier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003698 laser cutting Methods 0.000 title claims abstract description 17
- 230000007246 mechanism Effects 0.000 claims abstract description 34
- 230000005540 biological transmission Effects 0.000 claims abstract description 17
- 230000033001 locomotion Effects 0.000 claims abstract description 10
- 239000000463 material Substances 0.000 claims description 16
- 230000003028 elevating effect Effects 0.000 claims description 15
- 238000007667 floating Methods 0.000 claims description 11
- 230000000903 blocking effect Effects 0.000 claims description 10
- 241000252254 Catostomidae Species 0.000 claims description 5
- 230000001105 regulatory effect Effects 0.000 claims description 4
- 238000009826 distribution Methods 0.000 claims description 3
- 238000004519 manufacturing process Methods 0.000 abstract description 6
- 239000003638 chemical reducing agent Substances 0.000 abstract 2
- 230000001174 ascending effect Effects 0.000 abstract 1
- 239000002699 waste material Substances 0.000 description 7
- 230000001360 synchronised effect Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 4
- 238000003754 machining Methods 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000005034 decoration Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 229910052755 nonmetal Inorganic materials 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 239000004753 textile Substances 0.000 description 1
Images





Landscapes
- Laser Beam Processing (AREA)
- Feeding Of Workpieces (AREA)
Abstract
本发明公开了机床领域内的激光切割自动上下料机械手,包括网格状的吸盘架,吸盘架下侧设有若干吸盘,吸盘架上方设有与机床的送料机构相连的支撑架,支撑架上设置有驱动吸盘架升降运动的升降机构;支撑架上还设置有减速电机,传动轴的中部与减速电机传动连接,传动轴经轴承安装在支撑架上,传动轴两端分别设有齿轮,每一齿轮的上下侧分别与一齿条相啮合,齿条设置在四根相平行的横梁上,横梁与支撑架之间经导轨滑块机构相连,位于齿轮下侧的两根横梁的外端部以及位于齿轮上侧的两根横梁的外端部各自连接有一水平设置的下料叉,两下料叉位于同一水平高度位置,两下料叉相近端上侧分别设有挡料杆。该装置可以实现自动上下料,可提高生产效率。
Description
技术领域
本发明涉及一种机械加工机床,特别涉及一种激光切割机。
背景技术
激光切割机是以激光作为一种加工手段对金属或非金属板材进行切割加工的装置,其可在平面板材上加工直线和任意形状的曲线。为了提升激光切割的效率和自动化水平,减轻工人的劳动强度,激光切割自动上下料系统应运而生,与激光切割机相结合构成了激光切割制造单元,广泛应用于电气制造、汽车、仪表开关、纺织机械、运输机械、家电制造、电梯设备制造、食品工业、装饰装潢与广告以及激光加工站等。
目前,在板料加工机床上,有一种吸盘上料装置,其主要包括由槽钢焊接而成的网格状的吸盘架,吸盘架下侧设有若干吸盘,用于吸起和放下板料,吸盘架上方设有支撑架,支撑架与机床的送料机构相连,可带动装置整体移动,并将吸盘上的待加工工件移动到加工位置,支撑架上直立设置有四个升降气缸,升降气缸呈矩形排列,各升降气缸的活塞杆与吸盘架相连。该装置通过吸盘吸起板料,由机床的送料机构将其运送到工作台位置,吸盘松开板料,机床对板料进行加工。其不足之处在于:其一,该装置不能实现全自动上下料,对于加工后的废板料,不能将其自动取出,影响了加工速度;其二,该装置中升降气缸需要同步工作,当出现轻微偏载时,气缸即可能出现卡阻,需要将板料放下,重新操作,也影响了加工速度。
发明内容
本发明的目的是提供一种激光切割自动上下料机械手,使得其能自动上 料,也能自动下料,实现上下料全自动,以提高生产效率。
本发明的目的是这样实现的:激光切割自动上下料机械手,包括网格状的吸盘架,吸盘架下侧设有若干吸盘,吸盘架上方设有与机床的送料机构相连的支撑架,支撑架上设置有驱动吸盘架升降运动的升降机构;所述支撑架上还设置有减速电机,传动轴的中部与减速电机传动连接,传动轴经轴承安装在支撑架上,传动轴两端分别设有齿轮,每一齿轮的上下侧分别与一齿条相啮合,所述齿条设置在四根相平行的横梁上,所述横梁与支撑架之间经导轨滑块机构相连,位于齿轮下侧的两根横梁的外端部以及位于齿轮上侧的两根横梁的外端部各自连接有一水平设置的下料叉,两下料叉位于同一水平高度位置,所述两下料叉相近端上侧分别设有挡料杆;所述挡料杆与安装在相应横梁上的直线导轨经滑块相连接,支撑架上设有推料气缸,推料气缸与滑块之间经浮动接头相连接;所述推料气缸为双行程双出杆气缸,推料气缸的一端的活塞杆伸出端与支撑架相连,推料气缸的另一端的活塞杆伸出端与所述浮动接头相连。
该装置工作时,升降机构可驱动吸盘架上下运动,吸盘可将板料吸起和放下,送料机构带动支撑架运动,可将板料移动到工作台位置,吸盘将板料放置在工作台上,实现上料,上料后,送料机构可以将整个装置移开,以便于加工,加工完成后,可通过送料机构再次将整个装置移动到工作台位置,下料叉位于废料的外侧,减速电机带动齿轮转动,驱动横梁同步运动,使下料叉相向运动,将废料夹起,送料机构移动到下料位置后,通过减速电机将下料叉再次打开,废料落下,实现出料。与现有技术相比,本发明不仅可以实现自动上料,同时,也能实现自动下料,其能实现全自动上下料,可提高生产效率。该装置可保证不同宽度的废料能顺利下料,并能在下料位置堆叠整齐,推料气缸可驱动推料杆将板料平推,使板料下料位置恒定,以使得板料下料整齐。双行程双出杆气缸具有三个工作位置,可以提供不同的推料行 程,以满足不同尺寸板料的下料。该装置可用于激光切割机上。
为保证下料顺利,所述下料叉由若干下料针平行排列且其根部固定在连接件上而成;两下料叉的下料针的端部相向设置,所述挡料杆上设有若干凹口,下料针穿插入对应凹口内。该技术方案可保证薄板能被推料杆挡住,实现顺利下料。
作为本发明的进一步改进,所述升降机构为同步升降机构,为保证吸盘架不同位置运动同步且工作可靠,升降机构可具有如下两技术方案:其一,所述升降机构包括呈矩形排列并直立设置的四个升降气缸,支撑架上与升降气缸一一对应设有四个超级轴承,超级轴承内配合设有直立的导向光杆,导向光杆下端与吸盘架相连,升降气缸的活塞杆下端另设有浮动接头与吸盘架相连。超级轴承起导向作用,使导向光杆可以顺利上下移动,升降气缸与吸盘架之间经另设的浮动接头相连,当各个升降气缸位置出现偏载时,不会导致升降气缸偏载。其二,所述升降机构包括可转动地设置在支撑架上的四个链轮,四个链轮呈矩形分布,链轮之间绕装有链条,所述链条还与支撑架上设置的驱动轮和张紧轮相连接,各链轮中心螺纹连接有直立设置的螺纹杆,螺纹杆下端与吸盘架相连。链轮可保证各螺纹杆同步运动,使吸盘架的各个位置能同步升降。
附图说明
图1为本发明一种立体结构示意图。
图2为图1中A的局部放大图。
图3为图1中B的局部放大图。
图4为图1中本发明的局部结构示意图。
图5为本发明的平面结构示意图。
图6为吸盘分区结构示意图。
图7为同步升降机构的另一结构示意图。
图8为双行程双出杆气缸工作原理图。
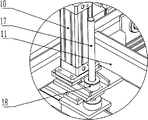
其中,1减速电机,2下料针,3挡料杆,4吸盘,5吸盘架,6齿轮,7横梁,8齿条,9连接件,10升降气缸,11支撑架,12传动轴,13导轨滑块机构,14滑块,15直线导轨,16凹口,17导向光杆,18超级轴承,19推料气缸,20浮动接头,21驱动轮,22链条,23螺纹杆,24链轮,25张紧轮。
具体实施方式
如图1-5所示,为激光切割自动上下料机械手,包括由槽钢焊接而成的网格状的吸盘架5,吸盘架5下侧设有若干吸盘4,根据待加工板材的尺寸,吸盘4可以如图6所示,分成三个区,对应于不同尺寸的板料,可通过气阀实现不同区域工作,吸盘架5上方设有可与机床的送料机构相连的支撑架11,支撑架11上设置有驱动吸盘架5升降运动的升降机构;支撑架11上还设置有减速电机1,传动轴12的中部与减速电机1传动连接,传动轴12经轴承安装在支撑架11上,传动轴12两端分别设有齿轮6,每一齿轮6的上下侧分别与一齿条8相啮合,齿条8设置在四根相平行的横梁7上,横梁7与支撑架11之间经导轨滑块机构13相连,位于齿轮6下侧的两根横梁7的外端部以及位于齿轮6上侧的两根横梁7的外端部各自连接有一水平设置的下料叉,两下料叉位于同一水平高度位置,两下料叉相近端上侧分别设有挡料杆3;下料叉由若干下料针2平行排列且其根部固定在连接件9上而成;两下料叉的下料针2的端部相向设置,挡料杆3上设有若干凹口16,下料针2穿插入对应凹口16内;挡料杆3与安装在相应横梁7上的直线导轨15经滑块14相连接,支撑架11上设有推料气缸19,推料气缸19与滑块14之间经浮动 接头20相连接;推料气缸19为如图8所示的双行程双出杆气缸,推料气缸19的一端的活塞杆伸出端与支撑架11相连,推料气缸19的另一端的活塞杆伸出端与浮动接头20相连。所述升降机构包括呈矩形排列并直立设置的四个升降气缸10,支撑架11上与升降气缸10一一对应设有四个超级轴承18,超级轴承18为现有技术中的已有技术,其承受偏载时,可作适应性随动,超级轴承18内配合设有直立的导向光杆17,导向光杆17下端与吸盘架5相连,升降气缸10的活塞杆下端另设有浮动接头20与吸盘架5相连。
该装置工作时,升降气缸10可驱动吸盘架5上下运动,吸盘4可将板料吸起和放下,送料机构带动支撑架11运动,可将板料移动到工作台位置,吸盘4将板料放置在工作台上,实现上料,上料后,送料机构可以将整个装置移开,以便加工,加工完成后,可通过送料机构再次将整个装置移动到工作台位置,下料叉位于废料的外侧,减速电机1带动齿轮6转动,驱动横梁7同步运动,使下料叉相向运动,将废料夹起,然后,送料机构移动到下料位置,通过减速电机1将下料叉再次打开,废料落下,实现出料。通过推料气缸可将板料堆叠整齐。
本发明并不局限于上述结构,所述的升降机构还可以如图7所示,包括可转动地设置在支撑架11上的四个链轮24,四个链轮24呈矩形分布,链轮24之间绕装有链条22,所述链条22还与支撑架11上设置的驱动轮21和张紧轮25相连接,各链轮24中心螺纹连接有直立设置的螺纹杆23,螺纹杆23下端与吸盘架5相连。
该装置复合了上料、下料、挡料、推料等多项功能,其自动化程度高、下料叉同步伸缩、吸盘架5升降同步、工作稳定可靠。
Claims (4)
1.激光切割自动上下料机械手,包括网格状的吸盘架,吸盘架下侧设有若干吸盘,吸盘架上方设有与机床的送料机构相连的支撑架,支撑架上设置有驱动吸盘架升降运动的升降机构;其特征在于:所述支撑架上还设置有减速电机,传动轴的中部与减速电机传动连接,传动轴经轴承安装在支撑架上,传动轴两端分别设有齿轮,每一齿轮的上下侧分别与一齿条相啮合,所述齿条设置在四根相平行的横梁上,所述横梁与支撑架之间经导轨滑块机构相连,位于齿轮下侧的两根横梁的外端部以及位于齿轮上侧的两根横梁的外端部各自连接有一水平设置的下料叉,两下料叉位于同一水平高度位置,所述两下料叉相近端上侧分别设有挡料杆;所述挡料杆与安装在相应横梁上的直线导轨经滑块相连接,支撑架上设有推料气缸,推料气缸与滑块之间经浮动接头相连接;所述推料气缸为双行程双出杆气缸,推料气缸的一端的活塞杆伸出端与支撑架相连,推料气缸的另一端的活塞杆伸出端与所述浮动接头相连。
2.根据权利要求1所述的激光切割自动上下料机械手,其特征在于:所述下料叉由若干下料针平行排列且其根部固定在连接件上而成;两下料叉的下料针的端部相向设置,所述挡料杆上设有若干凹口,下料针穿插入对应凹口内。
3.根据权利要求1所述的激光切割自动上下料机械手,其特征在于:所述升降机构包括呈矩形排列并直立设置的四个升降气缸,支撑架上与升降气缸一一对应设有四个超级轴承,超级轴承内配合设有直立的导向光杆,导向光杆下端与吸盘架相连,升降气缸的活塞杆下端另设有浮动接头与吸盘架相连。
4.根据权利要求1所述的激光切割自动上下料机械手,其特征在于:所述升降机构包括可转动地设置在支撑架上的四个链轮,四个链轮呈矩形分布,链轮之间绕装有链条,所述链条还与支撑架上设置的驱动轮和张紧轮相连接,各链轮中心螺纹连接有直立设置的螺纹杆,螺纹杆下端与吸盘架相连。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 200910184072 CN101628362B (zh) | 2009-08-13 | 2009-08-13 | 激光切割自动上下料机械手 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 200910184072 CN101628362B (zh) | 2009-08-13 | 2009-08-13 | 激光切割自动上下料机械手 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101628362A CN101628362A (zh) | 2010-01-20 |
| CN101628362B true CN101628362B (zh) | 2011-10-19 |
Family
ID=41573733
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 200910184072 Active CN101628362B (zh) | 2009-08-13 | 2009-08-13 | 激光切割自动上下料机械手 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101628362B (zh) |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102114513B (zh) * | 2010-12-09 | 2013-01-09 | 江苏金方圆数控机床有限公司 | 一种高速送料机构 |
| CN102218602A (zh) * | 2011-03-30 | 2011-10-19 | 无锡华联精工机械有限公司 | 激光切割机工作台主架体 |
| CN102189553B (zh) * | 2011-05-18 | 2013-08-07 | 奇瑞汽车股份有限公司 | 一种机械手控制系统及控制方法 |
| CN102500931B (zh) * | 2011-11-15 | 2015-04-22 | 深圳市光大激光科技股份有限公司 | 自动上下料激光切割机 |
| CN102490175A (zh) * | 2011-11-19 | 2012-06-13 | 扬州锻压机床集团有限公司 | 机械手移送装置机构 |
| CN103144348A (zh) * | 2011-12-06 | 2013-06-12 | 东莞市天翔自动化设备有限公司 | 一种全自动冲床上下料机 |
| CN102658432A (zh) * | 2012-05-18 | 2012-09-12 | 句容市大华激光科技开发有限公司 | 一种激光打标切割两用机 |
| CN102756933B (zh) * | 2012-07-26 | 2015-03-25 | 无锡澳美机械有限公司 | 板材传送装置 |
| CN102923458A (zh) * | 2012-11-23 | 2013-02-13 | 烟台孚瑞克森汽车部件有限公司 | 刹车片自动下料输送线 |
| CN103056532B (zh) * | 2013-01-22 | 2015-05-20 | 大族激光科技产业集团股份有限公司 | 激光切割机单机自动上下料装置及方法 |
| CN103600171B (zh) * | 2013-04-28 | 2015-12-09 | 宝山钢铁股份有限公司 | 一种金属板上下料及切割的方法及系统 |
| CN103600173B (zh) * | 2013-04-28 | 2015-12-09 | 宝山钢铁股份有限公司 | 一种二工位快台切割的方法及其系统 |
| CN103863855B (zh) * | 2014-03-04 | 2017-02-22 | 绍兴县瑞群纺织机械科技有限公司 | 布料自动取放装置 |
| CN103962736B (zh) * | 2014-05-22 | 2016-02-03 | 江苏金方圆数控机床有限公司 | 激光切割板材废料分离及零件分选系统 |
| CN104175008B (zh) * | 2014-08-19 | 2016-04-06 | 深圳雷柏科技股份有限公司 | 一种采用机器人的镭射设备和镭射方法 |
| CN105016103A (zh) * | 2014-08-27 | 2015-11-04 | 东莞市佳的自动化设备科技有限公司 | 一种全自动极片激光切割成型机的收料机构及收料方法 |
| CN106312874B (zh) * | 2015-06-25 | 2018-05-22 | 江苏银环新能源科技有限公司 | 双玻无边框组件用挂钩自动装配装置 |
| CN105345831A (zh) * | 2015-12-18 | 2016-02-24 | 苏州金逸康自动化设备有限公司 | 一种用于连杆式送料流水线的吸附机械手 |
| CN105855979B (zh) * | 2016-05-19 | 2018-01-12 | 吉林省欣冉机械电子设备制造有限公司 | 智能工件加工设备 |
| CN106584435A (zh) * | 2016-12-29 | 2017-04-26 | 安徽智森电子科技有限公司 | 一种自动上料机械手机构 |
| CN106994565B (zh) * | 2017-05-27 | 2018-08-03 | 扬州恒佳自动化设备有限公司 | 一种紧凑型上下料装置 |
| CN108326443A (zh) * | 2017-05-27 | 2018-07-27 | 扬州恒佳自动化设备有限公司 | 一种激光切割机带分拣功能的上下料装置 |
| CN107088711A (zh) * | 2017-05-27 | 2017-08-25 | 扬州恒佳自动化设备有限公司 | 一种激光切割机上下料装置 |
| CN107097003A (zh) * | 2017-05-27 | 2017-08-29 | 扬州恒佳自动化设备有限公司 | 一种激光切割机上下料机器人 |
| CN107934543B (zh) * | 2017-12-19 | 2023-07-21 | 安徽省华夏机床制造有限公司 | 一种框架式板料输送设备 |
| CN107877005B (zh) * | 2017-12-24 | 2023-05-30 | 安徽工程大学 | 一种筒管自动切割装置及其切割方法 |
| CN108637543B (zh) * | 2018-06-05 | 2023-07-04 | 洛阳市优能自动化设备有限公司 | 一种全自动化排焊机装置 |
| CN108406146B (zh) * | 2018-06-13 | 2024-04-30 | 湖北易同科技发展有限公司 | 一种激光加工二维码自动化生产线用机械手 |
| CN109192043A (zh) * | 2018-08-16 | 2019-01-11 | 合肥永屹智能制造职业培训学校 | 一种机器人调试用多功能实训平台 |
| CN108867012A (zh) * | 2018-09-13 | 2018-11-23 | 常州市新创智能科技有限公司 | 一种多工位裁切吸布机 |
| CN110052741A (zh) * | 2018-11-22 | 2019-07-26 | 襄阳东昇机械有限公司 | 自动打点机 |
| CN109664033B (zh) * | 2019-01-24 | 2024-03-22 | 苏州迅镭激光科技有限公司 | 一种激光切割机的自动上下料装置 |
| CN110509304B (zh) * | 2019-07-30 | 2021-02-02 | 安徽纳赫智能科技有限公司 | 一种组合式端拾器 |
| CN111195785A (zh) * | 2020-03-25 | 2020-05-26 | 扬州恒佳自动化设备有限公司 | 一种激光叉齿防划伤装置 |
| CN112207854B (zh) * | 2020-08-27 | 2021-10-15 | 南京市晨枭软件技术有限公司 | 一种工业机器人夹取用复合夹具 |
| CN112192060B (zh) * | 2020-10-08 | 2024-12-13 | 浙江金澳兰机床有限公司 | 适用范围广具有升降翻转功能的下料结构 |
| CN113523498B (zh) * | 2021-07-13 | 2022-06-28 | 深圳市芯宇达电子有限公司 | 一种电子器件生产用快速取放点焊设备 |
| CN115229073B (zh) * | 2022-07-22 | 2024-12-06 | 江苏金方圆数控机床有限公司 | 一种冲剪复合机板料分拣码垛装置 |
| CN118650315B (zh) * | 2024-08-12 | 2024-12-13 | 奔腾激光(浙江)股份有限公司扬州分公司 | 一种基本型激光切割机上下料装置 |
| CN120644820B (zh) * | 2025-07-02 | 2026-04-07 | 河南诺信腾达电子科技有限公司 | 一种电池箱体加工用激光切割设备 |
-
2009
- 2009-08-13 CN CN 200910184072 patent/CN101628362B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101628362A (zh) | 2010-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101628362B (zh) | 激光切割自动上下料机械手 | |
| CN102114604B (zh) | 一种板料加工设备的自动上下料装置 | |
| CN201931321U (zh) | 板料加工设备的自动上下料装置 | |
| CN107902356A (zh) | 一种全自动物料输送系统 | |
| CN219990457U (zh) | 双层上料输送线 | |
| CN203031607U (zh) | 桁架机械手结构 | |
| CN107097003A (zh) | 一种激光切割机上下料机器人 | |
| CN104759935B (zh) | 板料多工位输送装置 | |
| CN201493616U (zh) | 一种激光切割自动上下料机械手 | |
| CN104773337A (zh) | 一种抓取式托盘自动分配装置 | |
| CN212705774U (zh) | 一种激光切割折弯复合生产线 | |
| CN204110812U (zh) | 滑撬输送自动返回式设备 | |
| CN206218814U (zh) | 一种文件夹上下料机构 | |
| CN203865616U (zh) | 货物装车自动码垛机构 | |
| CN203845377U (zh) | 激光切割柔性制造系统 | |
| CN205257309U (zh) | 一种用于货叉焊接的货叉自动搬运装置 | |
| CN204953724U (zh) | 一种冲压机床连续生产线 | |
| CN105945286A (zh) | 一种自动送料装置 | |
| CN203359548U (zh) | 轮胎搬运拆码垛系统 | |
| CN218968242U (zh) | 一种可替换托盘的叠包机 | |
| CN215247913U (zh) | 红切自动上料仓 | |
| CN220160594U (zh) | 零件分拣系统 | |
| CN218319257U (zh) | 周转箱物料流转循环装置 | |
| CN103506886A (zh) | 一种自动送料装置 | |
| CN211034376U (zh) | 角钢上料机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |