CN100427813C - 用于控制车辆驱动设备的控制装置 - Google Patents
用于控制车辆驱动设备的控制装置 Download PDFInfo
- Publication number
- CN100427813C CN100427813C CNB2005100748831A CN200510074883A CN100427813C CN 100427813 C CN100427813 C CN 100427813C CN B2005100748831 A CNB2005100748831 A CN B2005100748831A CN 200510074883 A CN200510074883 A CN 200510074883A CN 100427813 C CN100427813 C CN 100427813C
- Authority
- CN
- China
- Prior art keywords
- control
- gear shift
- differential
- rotatable member
- gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 244
- 238000000034 method Methods 0.000 claims description 5
- 230000008859 change Effects 0.000 abstract description 59
- 230000006870 function Effects 0.000 abstract description 10
- 238000012546 transfer Methods 0.000 description 51
- 230000008878 coupling Effects 0.000 description 35
- 238000010168 coupling process Methods 0.000 description 35
- 238000005859 coupling reaction Methods 0.000 description 35
- 238000006243 chemical reaction Methods 0.000 description 22
- 230000035939 shock Effects 0.000 description 17
- 238000003860 storage Methods 0.000 description 16
- 230000007935 neutral effect Effects 0.000 description 11
- 239000000446 fuel Substances 0.000 description 10
- 238000000926 separation method Methods 0.000 description 10
- 230000001276 controlling effect Effects 0.000 description 8
- 238000011156 evaluation Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 4
- 238000004378 air conditioning Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000010349 pulsation Effects 0.000 description 3
- 230000004907 flux Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000008450 motivation Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000003054 catalyst Substances 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005485 electric heating Methods 0.000 description 1
- 238000004146 energy storage Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 230000006386 memory function Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000001020 rhythmical effect Effects 0.000 description 1
- GOLXNESZZPUPJE-UHFFFAOYSA-N spiromesifen Chemical compound CC1=CC(C)=CC(C)=C1C(C(O1)=O)=C(OC(=O)CC(C)(C)C)C11CCCC1 GOLXNESZZPUPJE-UHFFFAOYSA-N 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/101—Infinitely variable gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/11—Controlling the power contribution of each of the prime movers to meet required power demand using model predictive control [MPC] strategies, i.e. control methods based on models predicting performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/182—Selecting between different operative modes, e.g. comfort and performance modes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/44—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion
- F16H3/72—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously
- F16H3/727—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously with at least two dynamo electric machines for creating an electric power path inside the gearing, e.g. using generator and motor for a variable power torque path
- F16H3/728—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously with at least two dynamo electric machines for creating an electric power path inside the gearing, e.g. using generator and motor for a variable power torque path with means to change ratio in the mechanical gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
- B60K1/02—Arrangement or mounting of electrical propulsion units comprising more than one electric motor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/06—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts
- F16H37/08—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing
- F16H37/0833—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths
- F16H37/084—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths at least one power path being a continuously variable transmission, i.e. CVT
- F16H2037/0866—Power split variators with distributing differentials, with the output of the CVT connected or connectable to the output shaft
- F16H2037/0873—Power split variators with distributing differentials, with the output of the CVT connected or connectable to the output shaft with switching, e.g. to change ranges
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/003—Transmissions for multiple ratios characterised by the number of forward speeds
- F16H2200/0043—Transmissions for multiple ratios characterised by the number of forward speeds the gear ratios comprising four forward speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/003—Transmissions for multiple ratios characterised by the number of forward speeds
- F16H2200/0047—Transmissions for multiple ratios characterised by the number of forward speeds the gear ratios comprising five forward speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/20—Transmissions using gears with orbital motion
- F16H2200/2002—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears
- F16H2200/201—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears with three sets of orbital gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/20—Transmissions using gears with orbital motion
- F16H2200/2002—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears
- F16H2200/2012—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears with four sets of orbital gears
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Abstract
公开了一种控制车辆驱动设备的控制装置,该驱动设备包括变速器系统,后者包括无级和有级换档部分,无级换档部分用作电控无级变速器并包括(a1)具有连接到发动机的第一旋转元件、连接到第一电动机的第二旋转元件和连接到传动构件的第三旋转元件的差速设备,和(a2)位于传动构件和驱动轮间动力传动路径中的第二电动机,有级换档部分用作有级自动变速器,控制装置包括:差速状态切换设备,选择性地将差速设备切换到无级换档部分用作电控无级变速器的差速状态和不用作其的非差速状态;和转速同步控制器,当进行变速器系统的有级换档控制时利用第一和/或第二电动机,进行第一至第三旋转元件各自转速到有级换档控制完成后其各自转速的同步控制。
Description
技术领域
本发明涉及用于控制车辆驱动设备的控制装置,具体而言驱动设备包括具有差速功能并由此用作换档设备即变速器的差速设备,并还包括有级自动变速器,并且本发明特别地涉及在驱动设备的档位被改变时控制该差速设备的技术。
背景技术
已知一种车辆的驱动设备,其包括将发动机输出分配到第一电动机和输出轴的差速设备;以及设置在差速设备的输出轴和驱动轮之间的第二电动机。混合动力车的驱动设备的示例由日本专利申请公开No.2003-130202、日本专利申请公开No.2003-130203、日本专利申请公开No.2003-127681和日本专利申请公开No.11(1999)-198668中的每一个所公开。在此混合动力车驱动设备中,差速设备例如由行星齿轮组构成,并通过行星齿轮组的差速功能而将发动机动力的主要部分机械地传递到驱动轮,并将动力的其余部分通过电气路径从第一电动机电气地传递到第二电动机。由此,差速设备用作其速比被电控改变的变速器,例如电控CVT(无级变速器)。差速设备被控制设备所控制,使得车辆可以在发动机被保持在最优工作状态的同时行驶。由此,改善了车辆的燃油消耗率。此外,由上述日本专利申请公开No.2003-130202所公开的车辆驱动设备还采用设置在差速设备的输出轴和驱动轮之间的动力传动路径中的有级自动变速器,以达到例如减小第二电机大小的目的。
通常,包括采用多个耦合设备的有级自动变速器在内的驱动设备的换档控制,通过啮合和/或分离(松开)耦合设备而改变有级自动变速器的档位来进行。此外,在由上述日本专利申请公开No.2003-130202所公开的车辆驱动设备中,不仅对于作为电控CVT的差速设备的操作,而且对于设置在差速设备的输出轴和驱动轮之间的动力传动路径中的有级自动变速器的有级换档,也类似地通过啮合和/或分离耦合设备来进行。
但是,根据执行耦合设备的啮合和/或分离以改变有级自动变速器的档位的时机,可能发生换档冲击。具体而言,在如上述日本专利申请公开No.2003-130202中公开的驱动设备中,其中不采用诸如变矩器之类的液压动力传动,档位的改变导致发动机转速相对于车辆行驶速度的明确改变,并由此更可能发生换档冲击。通常,希望在短时间内完成档位的改变以减小不传递驱动动力的时间段。但是,如果这样选择执行耦合设备的啮合和/或分离的时机来减小换档时间段,那么换档冲击的问题可能会加剧。
发明内容
所以本发明的目的是提供一种控制车辆的驱动设备的控制装置,该驱动设备包括具有差速功能并由此用作变速器的差速设备,并且还包括有级自动变速器,而且此控制装置可以在进行驱动设备的换档控制时抑制换档冲击。
根据本发明的第一方面,提供了一种用于控制车辆驱动设备的控制装置,所述驱动设备包括变速器系统,所述变速器系统包括(A)无级换档部分和(B)有级换档部分,所述无级换档部分包括(a1)具有连接到发动机的第一旋转元件、连接到第一电动机的第二旋转元件和连接到传动构件的第三旋转元件这三者的差速设备,和(a2)设置在所述传动构件和多个驱动轮之间的动力传动路径中的第二电动机,并且所述无级换档部分用作电控无级变速器,所述有级换档部分构成所述动力传动路径的一部分并用作有级自动变速器,所述控制装置包括:差速状态切换设备,其与所述差速设备相关联,并且选择性地将所述差速设备切换到其中所述无级换档部分可以用作电控无级变速器的差速状态、和其中所述无级换档部分不能用作电控无级变速器的非差速状态;和转速同步控制器,当进行所述变速器系统的有级换档控制时,所述转速同步控制器利用所述第一电动机和所述第二电动机中的至少一个,来进行所述第一旋转元件、第二旋转元件和第三旋转元件各自的转速到所述有级换档控制完成后其各自转速的同步控制。
因此,驱动设备包括差速设备,所述差速设备被设置成可由差速状态切换设备切换到其中所述无级换档部分可以用作电控无级变速器(CVT)的差速状态、和其中所述无级换档部分不能用作电控CVT的非差速状态。当对包括无级换档部分和有级换档部分的变速器系统进行有级换档控制时,所述转速同步控制器操作所述第一电动机和所述第二电动机中的至少一个,并由此进行差速设备的所述第一旋转元件、第二旋转元件和第三旋转元件各自的转速到所述有级换档控制完成后其各自转速的同步控制。所以,本控制装置可以限制不这样做就可能对驱动设备发生的换档冲击。
根据本发明的第二方面,提供了一种用于控制车辆驱动设备的控制装置,所述驱动设备包括变速器系统,所述变速器系统包括(A)无级换档部分和(B)有级换档部分,所述无级换档部分包括(a1)具有连接到发动机的第一旋转元件、连接到第一电动机的第二旋转元件和连接到传动构件的第三旋转元件这三者的差速设备,和(a2)设置在所述传动构件和多个驱动轮之间的动力传动路径中的第二电动机,并且所述无级换档部分用作电控无级变速器,所述有级换档部分构成所述动力传动路径的一部分并用作有级自动变速器,所述控制装置包括:差速状态切换设备,其与所述差速设备相关联,并且选择性地将所述差速设备切换到其中所述无级换档部分可以用作电控无级变速器的差速状态、和其中所述无级换档部分不能用作电控无级变速器的非差速状态;和转速同步控制器,当进行所述变速器系统的有级换档控制时,所述转速同步控制器利用所述第一电动机和所述第二电动机中的至少一个,来进行所述发动机的转速到所述有级换档控制完成后其转速的同步控制。
因此,驱动设备包括差速设备,所述差速设备被设置成可由差速状态切换设备切换到其中所述无级换档部分可以用作电控CVT的差速状态、和其中所述无级换档部分不能用作电控CVT的非差速状态。当对包括无级换档部分和有级换档部分的变速器系统进行有级换档控制时,所述转速同步控制器操作所述第一电动机和所述第二电动机中的至少一个,并由此进行所述发动机的转速到所述有级换档控制完成后其转速的同步控制。所以,本控制装置可以限制不这样做就可能对驱动设备发生的换档冲击。
根据本发明第一或第二方面的优选特征,所述差速状态切换设备选择性地建立其中所述第一旋转元件、第二旋转元件和第三旋转元件作为一个单元旋转的第一非差速状态与其中所述第二旋转元件不旋转的第二非差速状态中的一个作为所述非差速状态,并且其中当进行所述有级换档控制时,所述转速同步控制器选择多种不同转速同步控制方法中与关于是否进行所述第一非差速状态和所述第二非差速状态之间的切换的判断相对应的一种方法。因此,当进行有级换档控制时,可以恰当地进行所述第一旋转元件、第二旋转元件和第三旋转元件转速的同步控制,或者发动机转速的同步控制。因此,可以限制换档冲击。
根据本发明第一或第二方面的另一个特征,当进行所述有级换档控制时,所述转速同步控制器在进行所述第一非差速状态和所述第二非差速状态之间的所述切换时,暂时将所述差速设备切换到其所述差速状态,并由于作为所述电控无级变速器的所述无级换档部分的操作而进行所述同步控制。因此,即使所述第一旋转元件、第二旋转元件和第三旋转元件各自的转速或者所述发动机的转速可能由第一非差速状态和第二非差速状态之间的切换所改变,第一至第三旋转元件的转速或者发动机的转速也可以被快速地同步或者改变到有级换档控制完成后的三个旋转元件的转速或发动机的转速,该转速基于车速和速比而明确确定。所以,可以限制换档冲击。
根据本发明第一或第二方面的另一个特征,当进行所述有级换档控制时,所述转速同步控制器在不进行所述第一非差速状态和所述第二非差速状态之间的所述切换时,将所述差速设备保持为其所述非差速状态,并进行所述同步控制。因此,第一至第三旋转元件的转速或者发动机的转速可以被快速地同步或者改变到有级换档控制完成后的三个旋转元件的转速或发动机的转速,该转速基于车速和速比而明确确定。所以,可以限制换档冲击。
根据本发明第一或第二方面的另一个特征,当所述第一电动机和所述第二电动机中至少一个不能使用时,所述转速同步控制器进行以下两者之一,即所述有级换档部分的所述有级换档控制以及所述第一非差速状态和所述第二非差速状态之间的所述切换。因此,通常由有级自动变速器进行的至少一个换档控制,例如其中进行耦合设备的啮合和分离的有级换档控制,可以作为替代控制被执行。因此,可以限制换档冲击。
根据本发明第一或第二方面的另一个特征,所述差速状态切换设备包括(a)离合器和(b)制动器中至少一个,所述离合器将所述第一旋转元件、第二旋转元件和第三旋转元件的至少两个旋转元件连接到彼此,以建立所述第一非差速状态,所述制动器将所述第二旋转元件连接到非旋转元件以建立所述第二非差速状态。因此,差速设备可以容易地被切换到第一非差速状态和第二非差速状态。
根据本发明第一或第二方面的另一个特征,所述差速状态切换设备包括所述离合器和所述制动器,其中当所述离合器和所述制动器被松开时,所述差速设备被切换到其所述差速状态,在所述差速状态中所述第一旋转元件、第二旋转元件和第三旋转元件相对于彼此旋转并且所述无级换档部分用作电控无级变速器,其中当所述离合器被啮合而所述制动器被松开时,所述差速设备被切换到其所述第一非差速状态并且所述无级换档部分用作速比等于1的变速器,并且其中当所述制动器被啮合而所述离合器被松开时,所述差速设备被切换到其所述第二非差速状态并且所述无级换档部分用作速比小于1的增速变速器。因此,差速设备可以被切换到差速状态和非差速状态,并且可以被用作具有单个或多个恒定速比的变速器。
根据本发明第一或第二方面的另一个特征,所述差速设备包括具有行星轮架、太阳轮和齿圈的行星齿轮组,并且所述差速设备的所述第一旋转元件、第二旋转元件和第三旋转元件分别包括所述行星轮架、所述太阳轮和所述齿圈。因此,可以减小差速设备在其轴向上的尺寸。此外,差速设备可以由单个行星齿轮组构成。
根据本发明第一或第二方面的另一个特征,所述行星齿轮组包括具有行星齿轮的单级行星齿轮式行星齿轮组。因此,可以减小差速设备在其轴向上的尺寸。此外,差速设备可以由单个单级行星齿轮式行星齿轮组构成。
附图说明
通过结合附图阅读对本发明当前优选实施例的以下详细说明,将更好地理解本发明的以上和其他目的、特征、优点以及技术和工业重要性,附图中:
图1是解释作为本发明所应用到的混合动力车的驱动设备一部分的变速器系统的构造的示意图;
图2是操作表,表示变速器系统的无级或有级换档操作分别与液压操作摩擦耦合设备的各个操作状态的组合之间的关系,所述摩擦耦合设备用来执行这些换档操作;
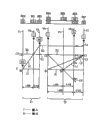
图3是共线图,用于解释八个旋转元件RE1至RE8在变速器系统的每个有级换档操作中的各个相对转速;
图4是解释驱动设备的电子控制设备的输入和输出信号的示意图;
图5是解释图4的控制设备的各种控制功能的示意图;
图6是示出以下两者之间关系的视图:(A)预先存储的换档图,其被准备在由车速和输出转矩这两个参数所限定的二维坐标系中,并且根据此换档图来选择变速器系统的有级换档部分所换档到的档位,(B)预先存储的状态切换图,其被准备在相同的二维坐标系中,并且根据此状态切换图来选择变速器系统所切换到的换档状态;
图7是示出预先存储的关系的视图,其包括无级控制区域和有级控制区域之间的边界线,并且被用作准备图6的状态切换图的无级控制区域和有级控制区域之间的边界(以虚线表示)的基础;
图8是示出当用作有级变速器的变速器系统被升档时发动机转速变化的示例的曲线图;
图9是流程图,用于解释当车辆行驶在其中执行变速器系统的有级换档控制的有级换档模式中时图4的控制设备的控制操作,即对变速器系统的无级换档部分的第一、第二和第三旋转元件转速的同步控制;
图10是时序图,用于解释当车辆行驶在有级换档模式中时图9的流程图所表示的控制操作,具体而言是将第四档位4th升档到第五档位5th的控制操作;
图11是时序图,用于解释当车辆行驶在有级换档模式中时图9的流程图所表示的控制操作,具体而言是将第五档位5th降档到第四档位4th的控制操作;
图12是时序图,用于解释当车辆行驶在有级换档模式中时图9的流程图所表示的控制操作,具体而言是将第三档位3rd升档到第四档位4th的控制操作;
图13是时序图,用于解释当车辆行驶在有级换档模式中时图9的流程图所表示的控制操作,具体而言是将第四档位4th降档到第三档位3rd的控制操作;
图14是与图1相对应的示意图,用于解释作为本发明第二实施例的另一种混合动力车的驱动设备一部分的变速器系统的构造;
图15是与图2相对应的操作表,表示图14的变速器系统的无级或有级换档操作分别与液压操作摩擦耦合设备的各个操作状态的组合之间的关系,所述摩擦耦合设备用来执行这些换档操作;
图16是与图3相对应的共线图,用于解释七个旋转元件RE1至RE7在图14的变速器系统的每个有级换档操作中的各个相对转速;和
图17是作为一种切换设备的交互转换式开关,其构成可由驾驶员手动操作的换档状态选择设备的一部分。
具体实施方式
下面,将参照附图详细说明本发明的优选实施例。
<第一实施例>
图1是示意图,用于解释构成本发明所应用到所谓“混合动力”机动车的驱动设备一部分的变速器系统10。混合动力车还包括图4所示的电子控制设备40。在图1中,变速器系统10包括:作为旋转输入构件的输入轴14、无级(即连续)换档部分11、用作有级自动变速器的有级自动换档部分20(以下称为“有级换档部分20”)、和作为旋转输出构件的输出轴22,以上所有部件串联地设置在变速器壳体12(以下称为“壳体12”)中的公共轴上,壳体12是被固定到车身的非旋转(即静止)构件。无级换档部分11直接连接到输入轴14,但是其也可以通过未示出的例如脉动吸收阻尼器(即减振设备)而间接连接。有级换档部分20在无级换档部分11和车辆的一对驱动轮38(图5)之间的动力传动路径中通过传动构件18(例如传动轴)串联连接到无级换档部分11。输出轴22连接到有级换档部分20。变速器系统10优选地用于FR(发动机前置后驱)车辆,其中系统10沿着车辆的纵轴设置。更具体而言,变速器系统10布置在作为汽油机或柴油机的内燃机(E/G)8(以下称为发动机8)和两个驱动轮38之间。发动机8用作产生驱动动力来驱动或运行车辆的驱动动力源,并且直接或者经由例如未示出的脉动吸收阻尼器间接地连接到输入轴14。如图5所示,变速器系统10将发动机8产生的驱动动力首先通过差速齿轮单元(例如主减速器)36并随后通过两个车轴,传递到两个驱动轮38。差速齿轮单元36构成驱动设备的另一部分,并且设置在动力传动路径中。因为变速器系统10相对于上述公共轴具有对称结构,所以图1中未示出系统10的下半部分。这对图14所示的作为第二实施例的另一个变速器系统70也一样。在作为第一实施例的本变速器系统10中,无级换档部分11“直接耦合”到发动机8。短语“直接耦合”表示无级换档部分11以在两个元件11、8之间未设置诸如变矩器或液力耦合器的液压动力传动的方式连接到发动机8,因此短语“直接耦合”包括两个元件11、8通过例如脉动吸收阻尼器而彼此连接的上述情况。
无级换档部分11包括第一电动机M1、用作差速设备的动力分动器16和第二电动机M2。动力分动器16是机械设备,其机械地分配输出到输入轴14的发动机8的驱动动力,更具体而言,其将发动机8的输出机械地分配到第一电动机M1和传动构件18。第二电动机M2与传动构件18一体旋转。第二电动机M2可以布置在动力传动路径中位于传动构件18和驱动轮38之间的部分内的任何位置。虽然第一电机M1和第二电机M2每个都是具有产生电能的功能的所谓“电动发电机”,但第一动机M1至少用作产生反作用力的发电机,而第二动机M2至少用作产生驱动力的电机。
动力分动器16主要由具有例如约0.418的预定传动比ρ1的单级行星齿轮式的第一行星齿轮组24、切换离合器C0和切换制动器B0构成。作为其多个旋转元件(即其多个元件),第一行星齿轮组24包括:第一太阳轮S1;第一行星齿轮P1;第一行星轮架CA1,其支撑第一行星齿轮P1使得第一行星齿轮P1可以自转和公转;和通过第一行星齿轮P1与第一太阳轮S1啮合的第一齿圈R1。在第一太阳轮S1和第一齿圈R1的齿数分别由ZS1和ZR1表示的情况下,第一行星齿轮组24的上述传动比ρ1表示为ρ1=ZS1/ZR1。
动力分动器16被构造成:第一行星轮架CA1连接到输入轴14,并由此连接到发动机8;第一太阳轮S1连接到第一电动机M1;而第一齿圈R1连接到传动构件18。此外,切换制动器B0布置在第一太阳轮S1和壳体12之间,而切换离合器C0布置在第一太阳轮S1和第一行星轮架CA1之间。在离合C0和制动器B0两者都分离(即松开)的状态下,作为第一行星齿轮组24三个元件的第一太阳轮S1、第一行星轮架CA1和第一齿圈R1相对于彼此可旋转,使得动力分动器16被切换到差速状态,在差速状态中动力分动器16用作差速设备并且发动机8的输出由此被分配到第一电动机M1和传动构件18。更具体而言,发动机8的一部分输出存储为由第一电动机M1产生的电能,而发动机8的另一部分输出被用来旋转第二电动机M2,使得无级换档部分11被切换到所谓的“无级换档状态”,在此状态中该部分11用作电控CVT(无级变速器)。由此,当发动机8在恒定速度下旋转时,传动构件18的转速被连续地改变。即,当动力分动器16被切换到差速状态时,无级换档部分11被切换到无级换档状态,在此状态中该部分11用作电控CVT,并且该部分11的速比(即变速器速比)γ0由此可以在最小值γ0min和最大值γ0max之间连续地改变。无级换档部分11的速比γ0被定义为通过将输入轴14的转速除以传动构件18的转速所获得的值。
在上述无级换档状态中,如果切换离合器C0或切换制动器B0中任一个啮合,则动力分动器16被切换到其中分动器16不能用作差速设备的非差速状态。更具体而言,在切换离合器C0啮合(但切换制动器B0保持分离)并且第一太阳轮S1和第一行星轮架CA1由此彼此啮合为一体的状态下,作为第一行星齿轮组24三个构件的第一太阳轮S1、第一行星轮架CA1和第一齿圈R1被置于其中这三个元件作为一个整体单元旋转的锁止状态,因此动力分动器16被切换到其中分动器16不能用作差速设备的第一非差速状态。因为第一非差速状态中发动机8和传动构件18各自的转速彼此相等,所以无级换档部分11切换到恒定换档状态,其中该部分11用作速比γ0固定为1的变速器。或者,如果切换制动器B0被啮合(但切换离合器C0分离)并且第一太阳轮S1由此连接到壳体12,则第一太阳轮S1被置于其中第一太阳轮S1不能旋转的锁止状态,从而动力分动器16被切换到其中分动器16不能用作差速设备的第二非差速状态。因为在第二非差速状态中第一齿圈R1以高于第一行星轮架CA1的转速旋转,所以无级换档部分11被置于不同的恒定换档状态,其中该部分11用作速比固定为小于1的值(例如等于约0.7的值)的增速变速器。由此,在本实施例中,切换离合器C0和切换制动器B0中的每一个用作状态切换设备,其选择性地将动力分动器16或无级换档部分11切换到无级换档状态(其中该部分11用作电控CVT,即其速比γ0可连续变化)或者锁止状态(其中该部分11不用作电控CVT,即部分11的速比γ0被固定为特定值),即恒定换档状态(其中部分11用作具有一个或多个恒定或固定速比的单级或多级变速器)。
有级换档部分20包括单级行星齿轮式第二行星齿轮组26、单级行星齿轮式第三行星齿轮组28和单级行星齿轮式第四行星齿轮组30。第二行星齿轮组26包括:第二太阳轮S2;第二行星齿轮P2;第二行星轮架CA2,其支撑第二行星齿轮P2使得第二行星齿轮P2可以自转和公转;和通过第二行星齿轮P2而与第二太阳轮S2啮合的第二齿圈R2。第二行星齿轮组26具有例如约0.562的预定传动比ρ2。第三行星齿轮组28包括:第三太阳轮S3;第三行星齿轮P3;第三行星轮架CA3,其支撑第三行星齿轮P3使得第三行星齿轮P3可以自转和公转;和通过第三行星齿轮P3而与第三太阳轮S3啮合的第三齿圈R3。第三行星齿轮组28具有例如约0.425的预定传动比ρ3。第四行星齿轮组30包括:第四太阳轮S4;第四行星齿轮P4;第四行星轮架CA4,其支撑第四行星齿轮P4使得第四行星齿轮P4可以自转和公转;和通过第四行星齿轮P4而与第四太阳轮S4啮合的第四齿圈R4。第四行星齿轮组30具有例如约0.421的预定传动比ρ4。在第二太阳轮S2、第二齿圈R2、第三太阳轮S3、第三齿圈R3、第四太阳轮S4和第四齿圈R4的齿数分别由ZS2、ZR2、ZS3、ZR3、ZS4和ZR4表示的情况下,上述传动比ρ2、ρ3和ρ4分别定义为ρ2=ZS2/ZR2、ρ3=ZS3/ZR3和ρ4=ZS4/ZR4。
在有级换档部分20中,第二太阳轮S2和第三太阳轮S3一体地连接到彼此,通过第二离合器C2可选择性地连接到传动构件18,并且通过第一制动器B1可选择性地连接到壳体12;第二行星轮架CA2通过第二制动器B2可选择性地连接到壳体12;第四齿圈R4通过第三制动器B3可选择性地连接到壳体12;第二齿圈R2、第三行星轮架CA3和第四行星轮架CA4一体地连接到彼此并且连接到输出轴22;以及第三齿圈R3和第四太阳轮S4一体地连接到彼此,并且通过第一离合器C1可选择性地连接到传动构件18。
上述切换离合器C0、第一离合器C1、第二离合器C2、切换制动器B0、第一制动器B1、第二制动器B2和第三制动器B3中的每一个都是传统车用自动变速器中使用的液压操作摩擦耦合设备,并且可以是其中彼此叠置的多个摩擦盘通过液压驱动器压紧的盘式,或者是带式,在带式中缠绕着转鼓外周表面的一条或两条带的一个末端或者各自的一个末端由液压驱动器张紧。摩擦耦合设备中的每一个用来选择性地将该摩擦耦合设备置于其间的两个构件彼此连接。
在如上构造的变速器系统10中,切换离合器C0、第一离合器C1、第二离合器C2、切换制动器B0、第一制动器B1、第二制动器B2和第三制动器B3如图2中操作表所示地被选择性地啮合或分离,来选择性地建立第一档位(1st)、第二档位(2nd)、第三档位(3rd)、第四档位(4th)、第五档位(5th)、倒车档位(R)和空档位置(N)之一。第一档位1st至第五档位5th的各个速比γ以基本上相同的比率变化。每个速比γ被定义为等于(输入轴14的转速NIN)/(输出轴22的转速NOUT)。在图2的操作表中,符号“○”表示每个离合器C0、C1、C2或每个制动器B1、B2、B3的啮合状态;而符号“◎”表示当无级换档部分11在恒定换档状态下操作时切换离合器C0或切换制动器B0的啮合状态,以及当无级换档部分11用作电控CVT时切换离合器C0或切换制动器B0的分离(即松开)状态。在本实施例中,动力分动器16采用切换离合器C0和制动器B0,并且除了其中无级换档部分11用作电控CVT的无级换档状态外,当切换离合器C0或切换制动器B0中任一个啮合时,无级换档部分11可以采用恒定换档状态,其中该部分11用作其速比γ0固定的变速器。所以,当切换离合器C0或切换制动器B0中任一个啮合时,变速器系统10可以采用有级换档状态,其中被置于恒定换档状态的无级换档部分11与有级换档部分20协作,以用作有级变速器;并且当切换离合器C0或切换制动器B0都不啮合时,变速器系统10可以采用无级(连续)换档状态,其中被置于无级换档状态的无级换档部分11与有级换档部分20协作,以用作电控CVT。简言之,当切换离合器C0或切换制动器B0中任一个啮合时,变速器系统10被切换到有级换档状态;而当切换离合器C0或切换制动器B0都不啮合时,变速器系统10被切换到无级换档状态。此外,可以认为与变速器系统10一样,无级换档部分11是可选择性地切换到有级换档状态和无级换档状态的变速器。
例如,当变速器系统10用作有级变速器时,并且同时当切换离合器C0、第一离合器C1和第三制动器B3如图2所示地啮合时,建立其速比γ1的最大值等于例如约3.357的第一档位1st;当切换离合器C0、第一离合器C1和第二制动器B2啮合时,建立其速比γ2小于速比γ1并等于例如约2.180的第二档位2nd;当切换离合器C0、第一离合器C1和第一制动器B1啮合时,建立其速比γ3小于速比γ2并等于例如约1.424的第三档位3rd;当切换离合器C0、第一离合器C1和第二离合器C2啮合时,建立其速比γ4小于速比γ3并等于例如约1.000的第四档位4th;并且当切换制动器B0、第一离合器C1和第二离合器C2啮合时,建立其速比γ5小于速比γ4并等于例如约0.705的第五档位5th。此外,当第二离合器C2和第三制动器B3啮合时,建立其速比γR小于速比γ1、大于速比γ2并等于例如约3.209的倒车档位R。当建立空档位置N时,仅切换离合器C0啮合。
另一方面,在变速器系统10用作CVT时,切换离合器C0和切换制动器B0两者都被松开,如图2所示。由此,无级换档部分11用作CVT,并且串联连接到该部分11的有级换档部分20用作有级变速器。所以,当有级换档部分20在第一档位1st、第二档位2nd、第三档位3rd和第四档位4th的每一个中操作时,输入到该部分20的转速即传动构件18的转速被无级即连续地改变,因此第一至第四档位的每一个都具有这样的速比范围,在该速比范围中每个档位的速比可以被连续地改变。由此变速器系统10速比γ作为整体可在第一至第五档位中每对相邻档位之间连续变化。即,变速器系统10总速比γT作为整体可以连续变化。
由此,变速器系统10包括用作差速部分或第一换档部分的无级换档部分11;和用作自动换档部分或者第二换档部分的有级换档部分20。图3示出了共线图,其示出了表示第一至第八旋转元件RE1至RE8各自的相对转速的各个关系的直线,该关系对应于八个旋转元件以不同方式连接到彼此的不同档位。图3的共线图是二维坐标系,由表示第一至第四行星齿轮组24、26、28、30的传动比ρ的横轴,和表示八个旋转元件的相对转速的纵轴所限定。下面的水平实线X1表示转速0(零);上面的水平实线X2表示转速1.0(一),即连接到输入轴14的发动机8的转速NE;而两条水平虚线XG中的每一条表示传动构件18的转速。
三条垂直线Y1、Y2和Y3分别对应于动力分动器16的作为无级换档部分11一部分的三个元件。按照从左向右的顺序,第一垂直线Y1表示对应于第二旋转元件(即第二元件)RE2的第一太阳轮S1的相对转速;第二垂直线Y2表示对应于第一旋转元件(即第一元件)RE1的第一行星轮架CA1的相对转速;而第三垂直线Y3表示对应于第三旋转元件(即第三元件)RE3的第一齿圈R1的相对转速。三条垂直线Y1、Y2和Y3彼此分别隔开一定距离,该距离根据第一行星齿轮组24的传动比ρ1限定。此外,五条垂直线Y4、Y5、Y6、Y7和Y8分别对应于有级换档部分20的五个元件。按照从左向右的顺序,第四垂直线Y4表示连接到彼此并对应于第四旋转元件(即第四元件)RE4的第二和第三太阳轮S2、S3的相对转速;第五垂直线Y5表示对应于第五旋转元件(即第五元件)RE5的第二行星轮架CA2的相对转速;第六垂直线Y6表示对应于第六旋转元件(即第六元件)RE6的第四齿圈R4的相对转速;第七垂直线Y7表示连接到彼此并对应于第七旋转元件(即第七元件)RE7的第二齿圈R2、第三行星轮架CA3和第四行星轮架CA4的相对转速;而第八垂直线Y8表示连接到彼此并对应于第八旋转元件(即第八元件)RE8的第三齿圈R3和第四太阳轮S4的相对转速。五条垂直线Y4、Y5、Y6、Y7、Y8彼此分别隔开一定距离,该距离根据第二、第三和第四行星齿轮组26、28、30各自的传动比ρ2、ρ3和ρ4限定。在图3的共线图中,如果对应于每个行星齿轮组24、26、28、30太阳轮S和行星轮架CA的两条垂直线Y之间的距离等于1(一),那么每个行星齿轮组24、26、28、30的行星轮架CA和齿圈R的垂直线Y之间的距离等于每个行星齿轮组24、26、28、30的传动比ρ。更具体而言,在无级换档部分11中,两条垂直线Y1和Y2之间的距离等于1,而两条垂直线Y2和Y3之间的距离等于第一行星齿轮组24的传动比ρ1;而在有级换档部分20中,对应于第二、第三和第四行星齿轮组26、28、30中每一个的太阳轮S和行星轮架CA的两条垂直线Y之间的距离等于1(一),并且行星齿轮组26、28、30中每一个的行星轮架CA和齿圈R之间的距离等于行星齿轮组26、28、30中每一个的传动比ρ。
由此,图3的共线图表示了在变速器系统10的动力分动器16(或无级换档部分11)中,第一行星齿轮组24的第一旋转元件RE1(即第一行星轮架CA1)被直接耦合到输入轴14(即耦合到发动机8),并且通过切换离合器C0可选择性地连接到第二旋转元件RE2(即第一太阳轮S1);第二旋转元件RE2连接到第一电动机M1,并通过切换制动器B0可选择性地固定到壳体12;第三旋转元件RE3(即第一齿圈R1)连接到传动构件18和第二电动机M2,使得输入轴14的旋转运动(即旋转)通过传动构件18传递(即输入)到有级换档部分20。穿过两条线Y2和X2之间的交点的倾斜直线L0表示第一太阳轮S1和第一齿圈R1各自的转速之间的关系。
例如,在切换离合器C0和切换制动器B0两者都被松开使得动力分动器16被切换到无级换档状态(即差速状态)的状态下,如果由直线L0和垂直线Y1的交点所表示的第一太阳轮S1的转速增大或减小,则由直线L0和垂直线Y3的交点表示的第一齿圈R1的转速分别减小或增大。
此外,当切换离合器C0被啮合并且由此使得第一太阳轮S1和第一行星轮架CA1被连接到彼此时,动力分动器16被切换到其中动力分动器16的上述三个旋转构件作为一个整体单元一起旋转的第一非差速状态。因此,直线L0与水平线X2对准,即传动构件18在与发动机转速NE相同的转速下旋转。或者,当切换制动器B0被啮合时并由此使得第一太阳轮S1的旋转被停止时,动力分动器16被切换到其中动力分动器16用作增速器的第二非差速状态。因此,直线L0采取图3所示的状态,并且由直线L0和垂直线Y3的交点表示的第一齿圈R1或传动构件18的转速在从发动机转速NE被增大后输入到有级换档部分20。
此外,图3的共线图表示在有级换档部分20中,第四旋转元件RE4通过第二离合器C2可选择性地连接到传动构件18,并且通过第一制动器B1可选择性地连接到壳体12;第五旋转元件RE5通过第二制动器B2可选择性地连接到壳体12;第六旋转元件RE6通过第三制动器B3可选择性地连接到壳体12;第七旋转元件RE7可连接到输出轴22;而第八旋转元件RE8通过第一离合器C1可选择性地连接到传动构件18。
如图3所示,在有级换档部分20中,当第一离合器C1和第三制动器B3啮合时,(A)倾斜直线L1和(B)垂直线Y7的交点表示与第一档位1st相对应的输出轴22的转速,其中倾斜直线L1穿过(a1)表示第八旋转元件RE8转速的垂直线Y8和(a2)水平线X2的交点、以及(a3)表示第六旋转元件RE6转速的垂直线Y6和(a4)水平线X1之间的交点,垂直线Y7表示连接到输出轴22的第七旋转元件RE7的转速。类似地,当第一离合器C1和第二制动器B2啮合时,(C)倾斜直线L2和(B)表示连接到输出轴22的第七旋转元件RE7的转速的垂直线Y7的交点,表示与第二档位2nd相对应的输出轴22的转速;当第一离合器C1和第一制动器B1啮合时,(D)倾斜直线L3和(B)表示连接到输出轴22的第七旋转元件RE7的转速的垂直线Y7的交点,表示与第三档位3rd相对应的输出轴22的转速;并且当第一离合器C1和第二离合器C2啮合时,(E)水平直线L4和(B)表示连接到输出轴22的第七旋转元件RE7的转速的垂直线Y7的交点,表示与第四档位4th相对应的输出轴22的转速。在第一档位1st、第二档位2nd、第三档位3rd和第四档位4th的每一个中,因为切换离合器C0被啮合,所以驱动动力在与发动机转速NE相同的转速下从动力分动器16或无级换档部分11输入到第八旋转元件RE8。但是,当切换制动器B0取代切换离合器C0而被啮合时,驱动动力在比发动机转速NE高的转速下从无级换档部分11输入到第八旋转元件RE8。由此,当第一离合器C1、第二离合器C2和切换制动器B0被啮合时,(F)水平直线L5和(B)表示连接到输出轴22的第七旋转元件RE7的转速的垂直线Y7之间的交点,表示与第五档位5th相对应的输出轴22的转速。
图4示出了被输入到控制变速器系统10的电子控制装置40的信号、以及从控制装置40输出的输出信号。此控制装置40主要由包括CPU(中央处理器)、ROM(只读存储器)、RAM(随机访问存储器)和输入/输出(I/O)接口的所谓微计算机构成,并且在利用RAM的临时数据存储功能的同时根据存储在ROM中的程序来处理这些信号。由此,控制装置40执行变速器系统10的驱动控制,例如对于电动机M1和M2的混合动力驱动控制,以及对于有级换档部分20的换档控制。
如图4所示,电子控制设备40从发动机水温传感器接收表示发动机8的水温的信号;从换档位置传感器接收表示换档位置的信号;从发动机转速传感器接收表示发动机转速NE的信号;从传动比组选择器开关接收表示传动比组的选择的信号;从M模式开关接收命令M(电机运行)模式的信号;从空调开关接收表示电动空调操作的信号;从车速传感器接收与输出轴22的转速NOUT相对应的车速信号;从AT油温传感器接收表示有级换档部分20的工作油的温度的油温信号;从ECT开关接收ECT信号;从驻车制动器开关接收表示驻车制动器的操作的信号;从脚踏制动器开关接收表示脚踏制动器的操作的信号;从催化剂温度传感器接收表示催化剂温度的信号;从加速踏板开度传感器接收表示加速踏板的操作量的加速踏板开度信号Acc;从凸轮角度传感器接收凸轮角度信号;从雪地模式选择器开关接收表示对雪地模式的选择的雪地模式信号;从车辆加速度传感器接收表示车辆在其纵向上的加速度的加速度信号;从自动巡航选择器开关接收表示对自动巡航行驶模式的选择的自动巡航信号;从车辆重量传感器接收表示车辆重量的车辆重量信号;从车轮速度传感器接收表示驱动轮38的转速V的车辆速度信号;从有级变速器开关接收表示其操作的信号,该操作将无级换档部分11切换到其恒定换档状态(即其非差速状态),以将变速器系统10用作有级变速器;从无级变速器开关接收表示其操作的信号,该操作将无级换档部分11切换到其无级换档状态(即其差速状态),以将变速器系统10用作无级变速器(即无级变速器CVT);从M1转速传感器接收表示第一电动机M1的转速NM1的信号;并从M2转速传感器接收表示第二电动机M2的转速NM2的信号。
此外,如图4所示,电子控制设备40向电子节气门致动器输出驱动信号以调节节气门开度;输出增压器压力调节信号以调节增压器压力;输出电动空调驱动信号以驱动电动空调;在正时处输出点火信号以点火发动机8;输出命令信号以命令操作第一电动机M1;输出命令信号以命令操作第二电动机M2;输出换档位置显示信号以操作换档位置指示器显示换档位置(即操作位置);输出传动比显示信号以操作传动比指示器显示传动比;输出雪地模式显示信号以操作雪地模式指示器显示雪地模式;输出信号以控制AT管路压力控制电磁阀;输出ABS操作信号以操作ABS致动器来防止车辆被制动时车轮打滑;输出M模式显示信号以操作M模式指示器显示M模式;输出阀操作信号以操作液压控制回路42的AT电磁阀来控制无级换档部分11和有级换档部分20的液压操作摩擦耦合设备各自的液压致动器;输出驱动信号以操作作为液压控制回路42的液压源的AT电动油泵;输出信号以驱动电热器;并输出信号到巡航控制计算机。
图5是用于解释电子控制设备40的各种控制功能的示意图。在图5中,有级换档控制装置或设备54基于由车速V和有级换档部分20的输出转矩TOUT,根据图6所示的换档图来判断是否应当执行变速器系统10的换档控制,该换档图包括实线和点划线并由换档图存储装置或设备56预先存储。也就是说,有级换档控制装置54选择变速器系统10应当变化或换档到的一个适当的档位,并进行有级换档部分20的自动换档控制。更具体而言,有级换档控制装置54根据图2所示的操作图表来进行自动换档控制,虽然控制装置54并不操作切换离合器C0或切换制动器B0。
混合动力(HB)控制装置或设备52控制变速器系统10在上述无级换档状态中操作,即控制无级换档部分11在差速状态中操作,使得发动机8在高效率操作范围内操作。此外,混合动力控制装置52改变并优化发动机8和第二电动机M2之间的驱动力分配以及由第一电动机M1产生电能所引起的反作用力,来控制用作电控CVT即无级变速器的无级换档部分11的速比γ0。例如,混合动力控制装置52首先基于加速踏板的当前操作量Acc和车辆的当前行驶速度V来计算驾驶员所要求的输出,然后基于驾驶员所要求的输出和充电电能的期望值来计算需要的驱动力,然后计算发动机转速NE和总输出,最后基于总输出和发动机转速NE来控制发动机8的输出和由第一电动机M1产生的电能量。换言之,即使车速V和有级换档部分20的速比不改变,即传动构件18的转速不改变,混合动力控制装置52也可以通过控制或改变由第一电动机M1产生的电能量来控制或改变发动机转速NE。
混合动力控制装置52在考虑有级换档部分20的档位的同时进行其控制操作,以改善车辆的驱动性能和燃油消耗率。在此混合动力控制中,无级换档部分11被控制用作电控CVT,使得被确定为使发动机8在高效操作范围中操作的发动机转速NE(例如目标发动机转速NE *)与基于车速V和有级换档部分20的档位确定的传动构件18的转速相匹配。更具体而言,混合动力控制装置52在两个参数(即发动机转速NE和发动机转矩TE)限定的二维坐标系中具有预先存储的预先试验确定的优化曲线(即图或关系),因此当车辆在无级换档控制模式下行驶时,车辆的驱动性能和燃油消耗率彼此协调。为了按照预先存储的优化曲线操作发动机8,混合动力控制装置52确定变速器系统10的总速比γT的目标值,使得发动机转矩TE和发动机转速NE产生满足期望驱动力所需要的发动机输出,并控制无级换档部分11的速比γ0以获得总速比γT的目标值。由此,混合动力控制装置52在容许总速比γT被改变的容许范围(例如从13至0.5的范围)中控制或改变总速比γT。
混合动力控制装置52将第一电动机M1产生的电能或电功率通过逆变器58供应到电能存储装置60和第二电动机M2。因此,虽然发动机8的驱动动力的主要部分被机械地传递到传动构件18,但发动机8的一部分驱动动力被第一电动机M1消耗以产生电能,即被转换成电能。因此,由第一电动机M1产生的电能首先通过逆变器58被供应到第二电动机M2或第一电动机M1,然后从第二电动机M2或第一电动机M1供应到传动构件18。与电能的产生、电能的供应和第二电动机M2的电能消耗相关的所有元件彼此协作以构成电气路径,该电气路径以将发动机8的驱动动力的一部分转换成电能开始,并以电能转换成机械能结束。此外,即使发动机8可能处于停机状态或怠速状态,混合动力控制装置52也可以通过操作无级换档部分11作为电控CVT并且还仅操作一个或多个电动机(例如第二电动机M2)作为动力源来行驶车辆。
在本实施例中,无级换档部分11可以被切换到非差速状态(即恒定换档状态),其中部分11构成机械动力传动路径的一部分。在非差速状态中,不需要将第一电动机M1用作电能发电机或由此产生反作用力矩,并且混合动力控制装置52由此将第一电动机M1仅用作电动机。具体而言,在无级换档部分11的两个恒定换档状态之一,即第一至第三旋转元件RE1至RE3作为整体单元旋转的第一非差速状态中,混合动力控制装置52操作第一电动机M1(单独或者与第二电动机M2结合),使得可以利用第一电动机M1和/或第二电动机M2的转速来控制第一至第三旋转元件RE1至RE3的转速即发动机转速NE。但是,在无级换档部分11的有级换档状态中,动力分动器16的第二旋转元件RE2(即第一太阳轮S1)受到车速V的影响,所以发动机转速NE单位时间的变化率小于在无级换档部分11的无级换档状态中发动机转速NE单位时间的变化率。
增速档位判断装置或设备62基于车辆状态并根据换档图存储装置56预先存储的图6的换档图,来判断变速器系统10应当变化到的档位是否是增速档位(例如第五档位5th),以在变速器系统10被切换到有级换档状态时或者在变速器系统10已经处于有级换档状态时判断切换离合器C0和切换制动器B0中哪一个应当被啮合。
切换控制装置或设备50基于车辆状况(即车速V和输出转矩TOUT)并根据由图6中虚线和双点划线表示并且由换档图存储装置56预先存储的状态切换图(即关系),来判断变速器系统10应当被切换到无级换档状态和有级换档状态中的哪一个,即判断车辆状态处于(a)其中系统10应当被切换到无级换档状态的无级换档控制区域和(b)其中系统应当被切换到有级换档状态的有级换档控制区域中的哪一个。由此,切换控制装置50选择性地将变速器系统10切换到无级换档状态或有级换档状态。
更具体而言,当切换控制装置50判断车辆状态处于有级换档控制区域时,切换控制设备50向混合动力控制装置52输出信号不允许即禁止混合动力控制设备52进行混合动力控制或者无级换档控制,并且向有级换档控制装置54输出信号以允许有级换档控制装置54进行与变速器系统10的有级换档状态相对应的预定换档控制。更具体而言,有级换档控制装置54根据由换档图存储装置56预先存储的图6的换档图,来进行有级换档部分20的自动换档控制。图2示出了液压操作摩擦耦合设备即离合器C0、C1、C2和制动器B0、B1、B2和B3的各个操作状态的组合,在自动换档控制中选择这些摩擦耦合设备中适当的一个或多个。简言之,变速器系统10整体上,即无级换档部分11和有级换档部分20彼此协作以用作所谓的“有级自动变速器”,其根据图2的操作表来建立适当的一个档位。
例如,当增速档位判断装置62判断或选择第五档位5th时,切换控制装置50向液压控制回路42输出命令以使得松开切换离合器C0并使得啮合切换制动器B0,因此无级换档部分11用作具有固定速比γ0(例如0.7)的辅助变速器。由此变速器系统10整体上建立所谓“超速档位”,即其速比低于1.0的增速档位。另一方面,当增速档位判断装置62不判断或选择第五档位5th时,切换控制装置50向液压控制回路42输出命令以使得啮合切换离合器C0并使得松开切换制动器B0,因此无级换档部分11用作具有固定速比(例如1)的辅助变速器。由此变速器系统10整体上建立其速比不低于1.0的减速档位。简言之,切换控制设备50将变速器系统10切换到有级换档状态,并且在有级换档状态中无级换档部分11用作辅助变速器,其速比γ0可以在与两个档位相对应的两个值之间被选择性地改变或切换,而串联连接到无级换档部分11的有级换档部分20用作有级变速器。由此变速器系统10整体上用作所谓的“有级自动变速器”。
另一方面,当切换控制装置50判断车辆状态处于应当将变速器系统10切换到无级换档状态的无级换档控制区域中时,切换控制装置50向液压控制回路42输出命令以使得松开切换离合器C0和切换制动器B0两者,因此无级换档部分11被切换到无级换档状态,即被允许连续地改变转速。同时,切换控制装置50向混合动力控制装置52输出信号以允许混合动力控制装置52进行混合动力控制,并且向有级换档控制装置54输出信号,以使得有级换档控制装置54固定到与变速器系统10的无级换档状态相对应的预定档位,或者向有级换档控制装置54输出信号以允许有级换档控制装置54根据换档图存储装置56预先存储的图6的换档图进行有级换档部分20的自动换档控制。在此情况下,有级换档控制装置54根据图2的操作表来进行自动换档控制,虽然有级换档控制装置54不操作切换离合器C0或切换制动器B0。简言之,切换控制部分50将无级换档部分11切换到无级换档状态,使得无级换档部分11用作无级变速器,而串联连接到无级换档部分11的有级换档部分20用作有级变速器。由此获得适当的驱动力。此外,因为在有级换档部分20的第一档位1st、第二档位2nd、第三档位3rd和第四档位4th的每一个中,输入到该部分20的转速,即传动构件18的转速可以被连续地改变,所以每个档位的速比也可连续地改变。因为每个档位的速比可以被连续地改变,即在每对相邻档位之间速比可以被连续地改变,所以变速器系统10整体上可以被切换到其中总速比γT连续地改变的无级换档状态。
此处,将详细说明图6所示的曲线图。图6的曲线图示出了由换档图存储装置56预先存储的换档图(即关系),其被用来选择有级换档部分20的档位中适当的一个。预先存储的换档图是在由作为某种与驱动力相关的参数的两个参数(即车速V和输出转矩TOUT)所限定的二维坐标系中确定或准备的换档图示例。在图6中,实线表示升档操作,而点划线表示降档操作。此外,在图6中,两条虚线表示被切换控制装置50使用来判断车辆状态是处于有级换档控制区域还是无级换档控制区域的参考车速V1和参考输出转矩T1。更具体而言,图6中的第一虚线是高车速判断线,其是多个点的集合,每个点都表示作为被预先设置来判断车辆是否行驶在高车速下的高车速判断值的参考车速V1;而第二虚线是高输出行驶判断线,其是多个点的集合,每个点都表示作为被预先设置来判断混合动力车是否行驶在有级换档部分20的高值输出转矩TOUT(其是与车辆的驱动力相关的某种与驱动力相关的参数)下的高输出行驶判断值的参考输出转矩T1。而且,在图6中,两条双点划线表示被用来判断车辆状态是否处于有级换档控制区域或无级换档控制区域中的两条虚线各自的滞后。由此,图6示出了预先存储的状态切换图(即关系),其包括参考车速V1和参考输出转矩T1,并在基于两个参数即车速V和输出转矩TOUT来判断车辆状态是处于有级换档控制区域还是无级换档控制区域中时被切换控制装置50使用。此状态切换图可以由换档图存储装置56存储作为换档图的一个组成部分。此外,此状态切换图可以被修改为仅包括参考车速V1和参考输出转矩T1中的一个,或者可以被修改为仅采用车速V和输出转矩TOUT中的一个作为参数。
用于比较实际车速V与参考车速V1的判断数学公式和/或用于比较实际输出转矩TOUT与参考输出转矩T1的判断数学公式可以由换档图存储装置56预先存储,来代替换档图和/或状态切换图。在此情况下,例如当作为车辆状态的实际车速V高于参考车速V1时,切换控制装置50将变速器系统10切换到有级换档状态。或者,例如当作为车辆状态的有级换档部分20的实际输出转矩TOUT大于参考输出转矩T1时,切换控制装置50将变速器系统10切换到有级换档状态。可以使切换控制装置50适合于这样,当使无级换档部分11用作电控CVT的电气控制设备(例如一个或多个电动机)发生故障或其性能下降时,例如,当与电气路径(以第一电动机M1产生电能开始并以电能转换成机械能结束)相关的电气设备的性能下降,即当因为例如老化劣化(例如故障或低温),第一电动机M1、第二电动机M2、逆变器58、存储设备60和将这些元件M1、M2、58、60彼此连接起来的传动路径出现故障,或者元件M1、M2、58、60和传动路径的性能下降或失败时,切换控制装置50优先将变速器系统10切换到有级换档状态。
上述与驱动力相关的参数一一对应于车辆的驱动力,并且可以不仅是输入到驱动轮38的驱动转矩或驱动力,还可以是例如有级换档部分20的输出转矩TOUT的实际值、发动机转矩TE、车辆加速度、或者基于例如加速踏板开度或节气门开度(或进气量、空燃比或燃油消耗)和发动机转速NE而计算出的发动机转矩TE、或者基于驾驶员对加速踏板的操作量或节气门开度而计算出的期望驱动力的估计值。上述驱动转矩可以在考虑例如差速比或驱动轮38的半径的同时从例如输出转矩TOUT来计算,或者可以通过例如转矩传感器直接检测。这些对上述其他种类的转矩同样适用。
此外,例如参考车速V1被预设为这样,如果变速器系统10被切换到无级换档状态,当车辆在相当高的速度下行驶但燃油消耗率在该速度下恶化时,则变速器系统10不被切换到无级换档状态,即在该速度下保留在有级换档状态中。此外,参考输出转矩T1被预设为与例如与第一电动机M1的这样的特性相对应,该特性使得电动机M1可以被设置来输出小电能作为其最大电能输出,以达到这样的目的,即减小电动机M1的大小,而不会当车辆在高输出下行驶时使得电动机M1的反作用力矩跟随发动机8的输出达到其高输出范围。
图7示出了可以由换档图存储装置56预先存储的另一个状态切换图(即另一关系)。此状态切换图示出了作为边界线的发动机输出线,其由切换控制装置50用来判断由两个参数(即发动机转速NE和发动机转矩TE)所表示的当前车辆状态是处于有级换档控制区域还是无级换档控制区域中。切换控制装置50在判断由发动机转速NE和发动机转矩TE所表示的车辆状态是处于有级换档控制区域还是无级换档控制区域中时,可以使用图7所示的状态切换图来代替取6所示的状态切换图。图7的状态切换图被用作确定图6所示的虚线的基础。换言之,通过将图7所示的状态切换图(或关系)转换成在由两个参数(即车速V和输出转矩TOUT)限定的二维坐标系中绘制的状态切换图,来获得图6的虚线。
在图6所示的关系中,有级换档控制区域(简称为有级控制区域(S))被定义为不低于预定参考输出转矩T1的高转矩区域,或不低于参考车速V1的高车速区域。所以,当发动机8在相当高驱动转矩下被操作,或者当车辆在相当高速度下行驶时,进行有级换档控制;当发动机8在相当低驱动转矩下被操作,或者当车辆在相当低速度下行驶时,即当发动机8在正常输出区域下操作时,进行无级换档控制。类似地,在图7所示的关系中,有级控制区域(S)被定义为不低于预定参考发动机转矩TE1的高转矩区域、不低于预定参考发动机转速NE1的高转速区域、或者不低于基于发动机转矩TE和发动机转速NE计算的预定参考发动机输出的高输出区域。于是,当发动机8在相当高的转矩下、相当高的转速下或者相当高的输出下操作时,进行有级换档控制;当发动机8在相当低的转矩下、相当低的转速下或者相当低的输出下操作时,即当发动机8在正常输出区域下操作时,进行无级换档控制。图7所示的有级换档控制区域(S)和无级换档控制区域(N)之间的边界对应于参考高车速线(其是每个都表示参考高车速的点的集合)和参考高输出线(其作为每个都表示参考高输出的点的集合)。
因此,例如当车辆在低速或中速下或者低输出或中输出下行驶时,变速器系统10被控制到无级换档状态,以获得车辆的高燃油经济性。但是,当车辆在高速下行驶时,例如当实际车速V超过参考车速V1时,变速器系统10被控制到其中变速器系统10作为有级变速器的有级换档状态,使得发动机8的输出只通过机械动力传动路径传递到驱动轮38,同时限制驱动动力和电能之间的转换损失(当变速器系统10被操作为电控CVT时会发生此转换损失)并由此改善了燃油消耗率。此外,当车辆在高输出下行驶时,例如,当诸如输出转矩TOUT的上述与驱动力相关的参数超过参考输出转矩T1时,变速器系统10被控制到其中变速器系统10用作有级变速器的有级换档状态,使得发动机8的输出只通过机械动力传动路径传递到驱动轮38。于是,仅当车辆行驶在低速或中速或者在低输出或中输出下行驶时,变速器系统10才被用作电控CVT。所以,可以减小由第一电动机M1产生的电能(即由第一电动机M1传送的电能)的最大值,由此可以减小第一电动机M1或者包括第一电动机M1的车辆驱动设备的大小。换言之,可以认为因为当车辆行驶在高输出下行驶时,驾驶员的期望驱动力比期望燃油消耗率更重要,所以变速器系统10被切换到有级换档状态(即恒定换档状态)而非无级换档状态。由此,驾驶员可以享受如图8所示的发动机转速NE的节奏性变化,当在有级自动换档状态中升档档位时产生此节奏性变化。
回到图5,差速状态判断装置80判断动力分动器16是否处于非差速状态,即无级换档部分11是否处于恒定换档状态。例如,差速状态判断装置80根据状态切换图,例如由切换控制装置50使用来判断车辆状态是处于有级换档控制区域(在该区域中变速器系统10应当被切换到有级换档状态,以使得车辆在有级换档控制模式下行驶)还是处于无级换档控制区域(在该区域中变速器系统10应当被切换到无级换档状态,以使得车辆在无级换档控制模式下行驶)中的图6的状态切换图,通过判断由车速V和输出转矩TOUT表示的车辆状态是否处于其中变速器系统10被控制或切换到有级换档状态的有级换档控制区域,来判断无级换档部分11是否处于恒定换档状态。由此,差速状态判断装置80还用作有级换档行驶判断装置或设备,其根据例如图6的状态切换图,通过判断由车速V和输出转矩TOUT表示的车辆状态是否处于有级换档控制区域,来判断车辆是否行驶在有级换档控制模式中。
作为转速同步控制器的转速同步控制装置或设备82包括与无级换档部分切换相关的同步控制装置或设备84和与无级换档部分直接耦合相关的同步控制装置或设备86,并且当车辆行驶在有级换档控制模式(其中变速器系统10处于有级换档控制下)中时,转速同步控制装置82使用第一电动机M1和/或第二电动机M2来进行动力分动器16的第一、第二和第三旋转元件RE1、RE2和RE3各自的转速到完成有级换档控制后第一、第二和第三旋转元件RE1、RE2和RE3各自的转速的同步控制。
如上所述,当车辆行驶在有级换档控制模式(其中变速器系统10处于有级换档控制下)中时,如图2的操作表所示,切换控制装置50使得切换离合器C0在第一档位1st至第四档位4th的每一个中啮合,并且有级换档控制装置54使得有级换档部分20在第一档位1st至第四档位4th中进行切换或换档。在第五档位5th中,切换控制装置50使得切换制动器B0啮合,并且有级换档控制装置54控制有级换档部分20以与部分20在第四档位4th中操作的方式相同的方式进行操作。由此,对第一档位1st至第四档位4th之间,车辆在有级换档控制模式中行驶时变速器系统10的有级换档控制由有级换档部分20进行,而对第四档位4th和第五档位5th之间则由无级换档部分11进行,即其在第一和第二非差速状态之间的切换。并且,存在这样的可能性,即根据在变速器系统10的有级换档控制下执行液压操作摩擦耦合设备C0、C1、C2、B0、B1、B2、B3的啮合和/或分离(松开)的时机,可能对系统10发生换档冲击。因此,为了抑制当车辆行驶在有级换档控制模式下时由变速器系统10的有级换档控制造成的换档冲击,转速同步控制装置82对第一旋转元件RE1至第三旋转元件RE3各自的转速进行同步控制。
当车辆在有级换档控制模式行驶期间,无级换档部分11在变速器系统10的有级换档控制下而在第一和第二非差速状态之间切换时,即,当变速器系统10的有级换档控制使系统10在第四档位4th和第五档位5th之间切换时,由于无级换档部分11用作电控CVT,与无级换档部分切换相关的同步控制装置84就暂时将动力分动器16切换到差速状态,并且对第一旋转元件RE1至第三旋转元件RE3各自的转速进行同步控制。
更具体而言,当第四档位4th被切换到第五档位5th时,即当切换离合器C0的啮合被切换制动器B0的啮合所取代时,与无级换档部分切换相关的同步控制装置84控制切换控制装置50执行切换离合器C0的分离,使得动力分动器16被暂时切换到差速状态。当切换离合器C0被分离时,同步控制装置84向混合动力控制装置52输出命令,以操作第一电动机M1产生切换离合器C0利用其来进行啮合的力矩同量级的反作用力矩,以维持与通过啮合切换离合器C0所维持的第一非差速状态相似的状态。换言之,同步控制装置84控制混合动力控制装置52,以操作第一电动机M1来承受与切换离合器C0的啮合力矩同量级的反作用力矩,并由此使第一电动机M1的转速NM1与发动机转速NE同步,使得即使切换离合器C0可能被分离时,第一旋转元件RE1至第三旋转元件RE3也作为整体单元旋转并且维持与第一非差速状态相似的状态。当第一电动机M1承受反作用力矩时,切换离合器C0不承受反作用力矩,并且即使切换离合器C0可能突然分离时,也不发生分离冲击,或者冲击被极大减小。由此,切换控制装置50可以不是通过缓慢降低离合器C0的液压,而是通过快速排出该液压来使得切换离合器C0分离。
接着,与无级换档部分切换相关的同步控制装置84由于无级换档部分11用作电控CVT,而对第一旋转元件RE1、第二旋转元件RE2和第三旋转元件RE3各自的转速向着完成从第四档位4th到第五档位5th的有级换档控制后这些元件RE1、RE2和RE3各自的转速进行同步控制。更具体而言,当切换制动器B0被啮合时,同步控制装置84向混合动力控制装置52输出命令来控制第二电动机M2,使得为了建立与第二非差速状态相似的状态,将第二电动机M2的转速NM2强制保持在基于车速V和有级换档部分20与第四档位4th相对应的速比(等于部分20的与第五档位5th相对应的速比)而明确确定的传动构件18的转速下,并且还输出命令以控制第一电动机M1来使切换制动器B0的相对旋转为零或最小化。此外,在同步状态下完成切换制动器B0的啮合后,同步控制装置84使第一电动机M1的输出转矩为零,使得第一电动机M1的反作用力矩被传递到切换制动器B0。在将切换制动器B0从分离状态操作到啮合状态期间,第一电动机M1承受反作用力矩而切换制动器B0不承受反作用力矩。因此,即使切换控制装置50可能不是通过缓慢增大制动器B0的液压而是通过快速增大其液压来使制动器B0啮合,也不发生啮合冲击,或者冲击可以被极大减小。
同时,当第五档位5th被切换到第四档位4th时,即当切换制动器B0的啮合被切换离合器C0的啮合所取代时,与无级换档部分切换相关的同步控制装置84以相似的方式操作。更具体而言,同步控制装置84控制切换控制装置50执行切换制动器B0的分离,使得动力分动器16被暂时切换到差速状态。当切换制动器B0被分离时,同步控制装置84向混合动力控制装置52输出命令,以操作第一电动机M1产生切换制动器B0利用其来进行啮合的力矩同量级的反作用力矩,以维持与通过啮合切换制动器B0所维持的第二非差速状态相似的状态。换言之,同步控制装置84控制混合动力控制装置52,以操作第一电动机M1来承受与切换制动器B0的啮合力矩同量级的反作用力矩,并由此使第一电动机M1的转速NM1维持基本上为零,使得即使切换制动器B0可能被分离时,第二旋转元件RE2的转速也维持基本上为零并且维持与第二非差速状态相似的状态。当第一电动机M1承受反作用力矩时,切换制动器B0不承受反作用力矩,即使切换制动器B0可能突然分离时,也不发生分离冲击,或者冲击被极大减小。由此,切换控制装置50可以不是通过缓慢降低制动器B0的液压而是通过快速排出该液压来使得切换制动器B0分离。
接着,与无级换档部分切换相关的同步控制装置84由于无级换档部分11用作电控CVT,而对第一旋转元件RE1、第二旋转元件RE2和第三旋转元件RE3各自的转速向着完成从第五档位5th到第四档位4th的有级换档控制后这些元件RE1、RE2和RE3各自的转速进行同步控制。更具体而言,当切换离合器C0被啮合时,同步控制装置84向混合动力控制装置52输出命令来控制第二电动机M2,使得为了建立与第一非差速状态相似的状态,将第二电动机M2的转速NM2强制维持在基于车速V和有级换档部分20与第四档位4th相对应的速比而明确确定的传动构件18的转速下,并且还输出命令以控制第一电动机M1来使切换离合器C0的相对旋转为零或最小化。此外,在同步状态下完成切换离合器C0的啮合后,同步控制装置84使第一电动机M1的输出转矩为零,使得第一电动机M1的反作用力矩被传递到切换离合器C0。在将切换离合器C0从分离状态操作到啮合状态期间,第一电动机M1承受反作用力矩而切换离合器C0不承受反作用力矩。因此,即使切换控制装置50可能不是通过缓慢增大离合器C0的液压而是通过快速增大其液压来使离合器C0啮合,也不发生啮合冲击,或者冲击可以被极大减小。
与无级换档部分直接耦合相关的同步控制装置86如下执行对第一旋转元件RE1至第三旋转元件RE3各自转速的同步控制:车辆在有级换档控制模式下行驶期间当无级换档部分11在变速器系统10的有级换档控制下不进行第一和第二非差速状态之间的切换的情况下,即,在变速器系统10的有级换档控制使系统10在第一档位1st至第四档位4th之间进行切换并且在无级换档部分11的直接耦合状态(其中切换离合器C0被啮合而第一旋转元件RE1至第三旋转元件RE3作为整体单元旋转)中由有级换档控制装置54仅进行有级换档部分20的换档控制的状态下,同步控制装置86通过在动力分动器16处于第一非差速状态下的状态中执行有级换档部分20的换档控制,来执行三个旋转元件即第一旋转元件RE1至第三旋转元件RE3各自转速的同步控制。
更具体而言,当变速器系统10在第一档位1st至第四档位4th之间进行切换时,与无级换档部分直接耦合相关的同步控制装置86操作切换控制装置50以维持切换离合器C0的啮合,并操作有级换档控制装置54来控制有级换档部分20。此外,同步控制装置86向混合动力控制装置52输出命令,以使用处于其中动力分动器16保持在第一非差速状态下的状态中的第一电动机M1和/或第二电动机M2,来执行作为整体单元旋转的第一旋转元件RE1至第三旋转元件RE3的转速(即第一电动机M1和第二电动机M2的转速)向着有级换档控制完成后旋转元件RE1至RE3的转速的同步控制。完成后的转速在有级换档部分20的操作期间基于车速V和该部分20的速比来明确确定。换言之,同步控制装置86通过操作第一电动机M1和/或第二电动机M2而将输入到有级换档部分20的输入转速(其在该部分20的档位进行切换时以有级方式被不同地改变)强制调节到有级换档控制完成后输入到有级换档部分20的输入转速,使得当进行液压操作摩擦耦合设备C2、B1、B2、B3的啮合和/或分离时所传递的力矩可以被降低并抑制换档冲击。
由此,为了当车辆行驶在有级换档控制模式期间在变速器系统10的有级换档控制中正确地执行第一旋转元件RE1至第三旋转元件RE3的转速的同步控制,转速同步控制装置82通过判断是否进行无级换档部分11在第一和第二非差速状态之间的切换,来选择与无级换档部分切换相关的同步控制装置84和与无级换档部分直接耦合相关的同步控制装置86之一,即选择两个不同同步控制方法之一。
同时,当无级换档部分11在恒定换档状态下操作时,即当变速器系统10在有级换档状态下操作时,第一旋转元件RE1至第三旋转元件RE3的转速明确限定了发动机转速NE。更具体而言,当变速器系统10在有级换档状态下操作时,第一旋转元件RE1至第三旋转元件RE3的转速一一对应于发动机转速NE。所以,当车辆行驶在有级换档控制模式期间在变速器系统10的有级换档控制中由转速同步控制装置82进行的、第一旋转元件RE1至第三旋转元件RE3的转速向着有级换档控制完成后旋转元件RE1至RE3的转速的同步控制,可以被视为发动机转速NE向着有级换档控制完成后的发动机转速NE的同步控制。换言之,在本实施例中,转速同步控制装置82使用第一电动机M1和/或第二电动机M2来执行发动机转速NE向着有级换档控制完成后的发动机转速NE的同步控制。
无级换档部分切换判断装置或设备88通过判断例如由增速档位判断装置62做出的目标档位是否为增速档位(例如第五档位5th)的判断是否已经从肯定判断改变为否定判断或者反之,来做出车辆行驶在有级换档控制模式期间变速器系统10的有级换档控制是否将系统10在第四档位4th和第五档位5th之间进行切换。
电动机可用性判断装置或设备90判断当车辆行驶在有级换档控制模式期间变速器系统10的有级换档控制中对第一旋转元件RE1至第三旋转元件RE3的转速执行同步控制时,第一电动机M1和第二电动机M2是否可由混合动力控制装置52使用。例如,电动机可用性判断装置90通过基于电能供应路径的导电性或电机M1、M2的转速来判断向电动机M1、M2供应电能的电能供应路径或电机M1、M2自身是否可以正常操作,而判断第一电动机M1、第二电动机M2是否可用。因此,电动机可用性判断装置90还用作电动机故障判断装置或设备,其判断电机M1、M2和/或与电机M1、M2相关的电气系统是否已经出现故障或者其性能是否已经降低。
如果电动机可用性判断装置或设备90判断当车辆行驶在有级换档控制模式期间变速器系统10的有级换档控制中第一电动机M1和第二电动机M2不可用,例如判断出电机M1、M2自身已经发生故障,则转速同步控制装置82不操作混合动力控制装置52执行第一旋转元件RE1至第三旋转元件RE3的转速的同步控制,而是通过操作有级换档控制装置54而执行有级换档部分20的操作或者通过操作控制切换控制装置50而执行第一和第二非差速状态之间的切换(即切换离合器C0的啮合和切换制动器B0的啮合之间的切换),来执行当车辆行驶在有级换档控制模式期间时变速器系统10的有级换档控制。
图9是表示电子控制设备40的控制操作的相关部分的流程图,即用于执行当车辆行驶在有级换档控制模式期间在变速器系统10的有级换档控制中无级换档部分11的第一旋转元件RE1、第二旋转元件RE2和第三旋转元件RE3的转速的同步控制的控制操作。根据此流程图的控制操作以非常短的周期时间(例如从数毫秒至数十毫秒)重复。图10、11、12和13示出了用于解释根据图9流程图的各个控制操作的时序图。更具体而言,图10示出了当第四档位4th被升档到第五档位5th时执行的控制操作;图11示出了当第五档位5th被降档到第四档位4th时执行的控制操作;图12示出了当第三档位3rd被升档到第四档位4th时执行的控制操作;而图13示出了当第四档位4th被降档到第三档位3rd时执行的控制操作。
首先,在对应于非差速状态判断装置80的步骤S1处,控制设备40判断动力分动器16是否处于非差速状态中,即车辆是否行驶在有级换档控制模式中。通过根据例如图6的状态切换图判断车辆状态是否处于有级换档控制区域(在此区域中变速器系统10应当被控制到有级换档控制状态,以使得车辆行驶在有级换档控制模式中)中,来做出此判断。如果在步骤S1处做出否定判断,则控制设备40的控制进行到步骤S9以维持车辆的当前行驶状态并退出本例程。另一方面,如果在步骤S1处做出肯定判断,则控制设备40的控制进行到对应于有级换档控制装置54的步骤S2。在步骤S2处,控制设备40通过根据例如图6所示的换档图,基于由车速V和有级换档部分20的输出转矩TOUT表示的车辆状态判断是否已经确定或选择了变速器系统10应当被换档到的档位,来判断是否应当执行变速器系统10的换档控制。
如果在步骤S2处做出否定判断,则控制进行到步骤S9以维持车辆的当前行驶状态并退出本例程。另一方面,如果在步骤S2处做出肯定判断,则控制进行到对应于无级换档部分切换判断装置88的步骤S3。在步骤S3处,控制设备40判断在步骤S2处选择的变速器系统10的换档控制是否是使变速器系统10在第四档位4th和第五档位5th之间换档。通过判断例如由增速档位判断装置62做出的关于已经选择第五档位5th的判断是否已从肯定判断改变到否定判断或者从否定判断改变到肯定判断,来做出此判断。在图10至13的每一个中所示的时间t1处做出此判断。
如果在步骤S3处做出肯定判断,则控制进行到对应于转速同步控制装置82(具体而言,与无级换档部分切换相关的同步控制装置84)的步骤S4。在步骤S4处,控制设备40操作切换控制装置50以暂时将动力分动器16切换到差速状态。例如,当如图10所示第四档位4th被升档到第五档位5th时,切换控制装置50执行切换离合器C0的分离;并且当如图11所示第五档位5th降档到第四档位4th时,切换控制装置50执行切换制动器B0的分离。在每种情况下,动力分动器16被暂时切换到差速状态。为此,控制设备40向混合动力控制装置52输出命令,以操作第一电动机M1产生与切换离合器C0利用其来进行啮合的啮合力矩、或者切换制动器B0利用其来进行啮合的啮合力矩相等的反作用力矩,直到液压被改变到使切换离合器C0或切换制动器B0基本上分离。所以,施加到切换离合器C0的液压或者施加到切换制动器B0的液压在切换控制装置50的控制下由液压控制回路42快速地排放。此操作在图10和11的每一个所示的时间t1和t2之间的时间段中进行。
步骤S4之后是对应于与无级换档部分切换相关的同步控制装置84的步骤S5。在步骤S5处,控制设备40由于无级换档部分11用作电控CVT,而执行第一旋转元件RE1、第二旋转元件RE2和第三旋转元件RE3各自的转速(即三个构件各自的转速)向着变速器系统10的有级换档控制完成后三个旋转元件RE1、RE2和RE3各自的转速的同步控制。例如,如图10所示,当切换制动器B0被啮合时,控制设备40向混合动力控制装置52输出命令来建立与第二非差速状态相似的状态,即将第二电动机M2的转速NM2强制维持在传动构件18的转速(其基于车速V和有级换档部分20与第四档位4th相对应的速比来明确确定),并且还输出命令以控制第一电动机M1来使切换制动器B0的相对转速为零。可以通过对第一太阳轮S1的转速即第一电机M1的转速NM1向零进行反馈控制而使切换制动器B0的相对转速为零,因此第二旋转元件RE2和壳体12各自转速的差可以变为零。由于此操作,发动机转速NE向着换档控制完成后的发动机转速NE而降低,并由此进行发动机转速NE的同步控制。此操作在图10所示的时间t2和t3之间的时间段中进行。
或者,如图11所示,当切换离合器C0被啮合时,控制设备40向混合动力控制装置52输出命令来建立与第一非差速状态相似的状态,即将第二电动机M2的转速NM2强制维持在传动构件18的转速(其基于车速V和有级换档部分20与第四档位4th相对应的速比来明确确定),并且还输出命令以控制第一电动机M1来使切换离合器C0的相对转速为零。可以通过对第一太阳轮S1的转速即第一电机M1的转速NM1向着传动构件18的转速(即第二电动机M2的转速NM2)进行反馈控制而使切换离合器C0的相对转速为零,因此第二旋转元件RE2和传动构件18各自转速的差可以变为零。由于此操作,发动机转速NE向着换档控制完成后的发动机转速NE而增大,并由此进行发动机转速NE的同步控制。此操作在图11所示的时间t2和t3之间的时间段中进行。
步骤S5之后是也对应于与无级换档部分切换相关的同步控制装置84的步骤S6。在步骤S6处,当第一旋转元件RE1、第二旋转元件RE2和第三旋转元件RE3各自的转速向着有级换档控制完成后三个旋转元件RE1、RE2和RE3各自的转速的同步控制完成后,控制设备40操作切换控制装置50以快速地施加液压到切换离合器C0或切换制动器B0。此操作在图10和11的每一个所示的时间t3和t4之间的时间段中进行。
另一方面,如果在步骤S3处做出否定判断,则控制进行到对应于转速同步控制装置82(具体而言,与无级换档部分直接耦合相关的同步控制装置86)的步骤S7。在步骤S7处,控制设备40操作有级换档控制装置54,以执行有级换档部分20的换档控制,如图12和13所示。步骤S7之后是对应于与无级换档部分直接耦合相关的同步控制装置86的步骤S8。在步骤S8处,控制设备40操作切换控制装置50以维持切换离合器C0的啮合,并向混合动力控制装置52输出命令,以使用第一电动机M1和/或第二电动机M2来执行作为整体单元旋转的第一旋转元件RE1至第三旋转元件RE3的转速(即第一电动机M1和第二电动机M2的转速)向着有级换档控制完成后旋转元件RE1至RE3的转速的同步控制。有级换档控制完成后三个旋转元件RE1至RE3的转速从车速V和与有级换档部分20当前的换档控制相对应的有级换档部分20速比来明确确定。此操作在图12和13的每一个所示的时间t2和时间t3之间的时间段中进行。关于这一点,注意图12和13的每一个所示的时间t1和时间t2之间的时间段表示发生在有级换档部分20的换档控制上的响应延迟。更具体而言,在时间t1处,有级换档控制装置54确定或选择有级换档部分20应当被换档到的目标档位,然后控制装置54通过执行部分20的(多个)液压操作摩擦耦合设备的啮合和/或分离来实际地开始对当前档位换档,并且在时间t2处,输入到部分20的输入转速开始变化。
从本实施例的上述说明清楚可见,变速器系统10设置有切换离合器C0和切换制动器B0,并且动力分动器16由于切换离合器C0和切换制动器B0,而可以被选择性地切换到其中无级换档部分11可以用作电控CVT的差速状态或者其中部分11不能用作电控CVT的非差速状态。所以,在当车辆行驶在有级换档控制模式期间的变速器系统10的有级换档控制中,转速同步控制装置82可以使用第一电动机M1和第二电动机M2,来执行动力分动器16的第一旋转元件RE1至第三旋转元件RE3各自的转速向着有级换档控制完成后三个元件RE1-RE3各自的转速的同步控制。因此,可以抑制换档冲击。
此外,在图示实施例中,在当车辆行驶在有级换档控制模式期间的变速器系统10的有级换档控制中,转速同步控制装置82可以基于是否进行第一和第二非差速状态之间的切换,来选择执行动力分动器16的第一旋转元件RE1至第三旋转元件RE3各自的转速的同步控制的不同方法中适当的一个。由此,第一旋转元件RE1至第三旋转元件RE3的转速的同步控制被恰当地执行,并且因此可以抑制换档冲击。
此外,在图示实施例中,在车辆行驶在有级换档控制模式期间的变速器系统10的有级换档控制中,当要进行第一和第二非差速状态之间的切换时,转速同步控制装置82(具体而言,与无级换档部分切换相关的同步控制装置84)暂时将动力分动器16切换到差速状态,并且由于无级换档部分11用作电控CVT而执行第一旋转元件RE1至第三旋转元件RE3各自的转速的同步控制。所以,即使通过第一和第二差速状态之间的切换而可以使第一旋转元件RE1至第三旋转元件RE3各自的转速相对于彼此被改变,第一旋转元件RE1至第三旋转元件RE3各自的转速也可以被快速地控制到有级换档控制完成后的三个元件RE1-RE3各自的转速,后述转速从车速和有级换档部分20的速比而明确确定。
例如,当非差速状态被暂时切换到差速状态时,或者当暂时的差速状态被切换到非差速状态时,电动机产生与切换离合器C0或切换制动器B0的啮合力矩相等的反作用力矩,使得进行第一旋转元件RE1至第三旋转元件RE3的转速的同步控制以维持与第一或第二差速状态相似的状态。因为切换离合器C0或切换制动器B0在同步控制下被啮合或分离,所以不发生啮合或分离冲击,或者冲击被极大地减小。此外,当切换离合器C0或切换制动器B0被啮合时,第二电动机M2的转速NM2被强制维持在传动构件18的转速(其从车速V和有级换档部分20与第四档位4th相对应的速比来明确确定),因此可以减小当第二旋转元件RE2(即第一太阳轮S1)的转速被第一电动机M1向着换档控制完成后第二旋转元件RE2的转速改变时传动构件18的转速变化。因此,可以抑制由车速变化所造成的冲击。
在图示实施例中,在车辆行驶在有级换档控制模式期间的变速器系统10的有级换档控制中,当不进行第一和第二非差速状态之间的切换时,转速同步控制装置82(具体而言,与无级换档部分直接耦合相关的同步控制装置86)将动力分动器16保持为第一非差速状态,并执行第一旋转元件RE1至第三旋转元件RE3的转速的同步控制。所以,第一旋转元件RE1至第三旋转元件RE3各自的转速可以被快速地控制或改变到有级换档控制完成后的三个元件RE1-RE3的转速,后述转速从车速V和有级换档部分20的速比被明确确定。因此,可以抑制换档冲击。
例如,当在有级换档部分20的换档控制中进行液压操作摩擦耦合设备C2、B1、B2、B3的啮合和/或分离时,第一电动机M1和/或第二电动机M2将输入到有级换档部分20的输入转速强制地改变或调节到完成换档控制后的转速。因此,大大减小了液压操作摩擦耦合设备中传递的转矩,并因此大大抑制了换档冲击。
在图示实施例中,在车辆行驶在有级换档控制模式期间的变速器系统10的有级换档控制中,当第一电动机M1和第二电动机M2不能被使用时,转速同步控制装置82操作有级换档控制装置54来执行有级换档部分20的换档控制,或者操作切换控制装置50来执行第一和第二非差速状态之间的切换。这是由传统有级自动变速器通常进行的换档控制,即其中液压操作摩擦耦合设备的啮合和分离(即松开)被彼此切换的换档控制。因此,在本变速器系统10中传统的换档控制作为代用控制来执行。
下面,将说明本发明的其他实施例。在下面的说明中,与第一实施例中所用标号相同的标号被用来指示其他实施例中相应的元件或部分,并且省略这些元件或部分的说明。
<第二实施例>
图14是用于解释构成本发明所应用到的另一驱动设备一部分的变速器系统70的示意图;图15是操作表,表示变速器系统70的档位与液压操作摩擦耦合设备的各个操作状态的相应组合之间的关系;并且图16是共线图,用于解释变速器系统70的换档操作。
与第一实施例中采用的变速器系统10相似,本第二实施例中采用的变速器系统70包括无级(即连续)换档部分11,其包括第一电动机M1、动力分动器16和第二电动机M2。此外,变速器系统70包括有级换档部分72,其设置在无级换档部分11和输出轴22之间,通过传动构件18串联连接到无级换档部分11,并具有三个档位。动力分动器16包括具有例如约0.418的预定传动比ρ1的单级行星齿轮式的第一行星齿轮组24、切换离合器C0和切换制动器B0。有级换档部分72包括具有单级行星齿轮式的第二行星齿轮组26和单级行星齿轮式的第三行星齿轮组28。第二行星齿轮组26具有例如约0.532的预定传动比ρ2;并且第三行星齿轮组28具有例如约0.418的预定传动比ρ3。在有级换档部分72中,第二行星齿轮组26的第二太阳轮S2和第三行星齿轮组28的第三太阳轮S3一体地连接到彼此,通过第二离合器C2可选择性地连接到传动构件18,并且通过第一制动器B1可选择性地连接到壳体12;第二行星齿轮组26的第二行星轮架CA2和第三行星齿轮组28的第三齿圈R3一体地连接到彼此并且连接到输出轴22;第二行星齿轮组26的第二齿圈R2通过第一离合器C1可选择性地连接到传动构件18;并且第三行星齿轮组28的第三行星轮架CA3通过第二制动器B2可选择性地连接到壳体12。
在如上构造的变速器系统70中,切换离合器C0、第一离合器C1、第二离合器C2、切换制动器B0、第一制动器B1和第二制动器B2被选择性地啮合或分离(即松开),如图15所示的操作图表表示的那样,以选择性地建立第一档位(1st)、第二档位(2nd)、第三档位(3rd)、第四档位(4th)、倒车档位(R)和空档位置(N)中任一个。第一档位1st至第四档位4th各自的速比γ(=输入轴14的转速NIN/输出轴22的转速NOUT)以基本上相同的比率变化。在图15的操作表中,符号“○”表示每个离合器C0、C1、C2和每个制动器B1、B2的啮合状态;而符号“◎”表示当无级换档部分11在恒定换档状态(其中部分11用作速比固定的变速器)下操作时切换离合器C0和切换制动器B0中每一个的啮合状态,和当该部分11在无级换档状态(其中部分11用作电控CVT)中操作时切换离合器C0、切换制动器B0的分离(松开)状态。在本实施例中,动力分动器16采用切换离合器C0和制动器B0,并且当切换离合器C0或切换制动器B0中任一个啮合时,无级换档部分11可以被选择性地切换到恒定换档状态,来代替无级换档状态。所以,当切换离合器C0或切换制动器B0中任一个啮合时,变速器系统70可以采用有级换档状态,其中被切换到恒定换档状态的无级换档部分11与有级换档部分72协作,来用作有级变速器;并且当切换离合器C0或切换制动器B0都不啮合时,变速器系统70可以采用无级(即连续)换档状态,其中被切换到无级换档状态的无级换档部分11与有级换档部分72协作,来用作电控CVT。简言之,当切换离合器C0或切换制动器B0中任一个啮合时,变速器系统70被切换到有级换档状态;而当切换离合器C0或切换制动器B0都不啮合时,变速器系统70被切换到无级换档状态。
例如,当变速器系统70用作有级变速器时,并且同时当切换离合器C0、第一离合器C1和第二制动器B2如图15所示地啮合时,建立其速比γ1的最大值等于例如约2.804的第一档位1st;当切换离合器C0、第一离合器C1和第一制动器B1啮合时,建立其速比γ2小于速比γ1并等于例如约1.531的第二档位2nd;当切换离合器C0、第一离合器C1和第二离合器C2啮合时,建立其速比γ3小于速比γ2并等于例如约1.000的第三档位3rd;并且当切换制动器B0、第一离合器C1和第二离合器C2啮合时,建立其速比γ4小于速比γ3并等于例如约0.705的第四档位4th。此外,当第二离合器C2和第二制动器B2啮合时,建立其速比γR小于速比γ1而大于速比γ2并等于例如约2.393的倒车档位R。当建立空档位置N时,仅切换离合器C0啮合。
另一方面,在变速器系统70用作电控CVT时,切换离合器C0和切换制动器B0两者都被分离(松开),如图15所示。于是,无级换档部分11用作电控CVT,并且串联连接到该部分11的有级换档部分72用作有级变速器。所以,当有级换档部分72在对应于第一档位1st、第二档位2nd和第三档位3rd的三个档位的每一个中操作时,输入到该部分72的转速即传动构件18的转速可以被无级即连续地改变,因此每一个档位都具有这样的速比范围,在该速比范围中每个档位的速比可以被连续地改变。由此,变速器系统70的速比可在第一至第四档位中每对相邻档位之间连续变化。即,变速器系统70总速比γT作为整体可以连续变化。
由此,变速器系统70包括用作差速部分或第一换档部分的无级换档部分11;和用作自动换档部分或者第二换档部分的有级换档部分72。图16示出了共线图,其示出了表示第一至第七旋转元件RE1至RE7各自的相对转速之间的各个关系的直线,该关系对应于旋转元件以不同方式连接到彼此的不同档位。当切换离合器C0和切换制动器B0两者被分离,或者当切换离合器C0或切换制动器B0中任一个被啮合时,动力分动器16的第一旋转元件RE1至第三旋转元件RE3各自的转速与第一实施例中采用的第一旋转元件RE1至第三旋转元件RE3的转速相同。
在图16中,四条垂直线Y4、Y5、Y6、Y7分别对应于有级换档部分70的四个元件。按照从左向右的顺序,第四垂直线Y4表示连接到彼此并对应于第四旋转元件RE4的第二和第三太阳轮S2、S3的相对转速;第五垂直线Y5表示对应于第五旋转元件RE5的第三行星轮架CA3的相对转速;第六垂直线Y6表示连接到彼此并对应于第六旋转元件RE6的第二行星轮架CA2和第三齿圈R3的相对转速;并且第七垂直线Y7表示对应于第七旋转元件RE7的第二齿圈R2的相对转速。在有级换档部分72中,第四旋转元件RE4通过第二离合器C2可选择性地连接到传动构件18,并且通过第一制动器B1可选择性地连接到壳体12;第五旋转元件RE5通过第二制动器B2可选择性地连接到壳体12;第六旋转元件RE6连接到输出轴22;而第七旋转元件RE7通过第一离合器C1可选择性地连接到传动构件18。
如图16所示,在有级换档部分72中,当第一离合器C1和第二制动器B2啮合时,由(A)倾斜直线L1和(B)垂直线Y6的交点表示输出轴22与第一档位1st相对应的转速,其中倾斜直线L1穿过(a1)表示第七旋转元件RE7转速的垂直线Y7和(a2)水平线X2的交点以及(a3)表示第五旋转元件RE5转速的垂直线Y5和(a4)水平线X1的交点,垂直线Y6表示连接到输出轴22的第六旋转元件RE6的转速。类似地,当第一离合器C1和第一制动器B1啮合时,由(C)倾斜直线L2和(B)表示连接到输出轴22的第六旋转元件RE6的转速的垂直线Y6的交点,表示与第二档位2nd相对应的输出轴22的转速;并且当第一离合器C1和第二离合器C2啮合时,由(D)倾斜直线L3和(B)表示连接到输出轴22的第六旋转元件RE6的转速的垂直线Y6的交点,表示与第三档位3rd相对应的输出轴22的转速。在第一档位1st、第二档位2nd和第三档位3rd的每一个中,因为切换离合器C0被啮合,所以驱动动力在与发动机转速NE相同的转速下从无级换档部分11输入到第七旋转元件RE7。但是,当切换制动器B0取代切换离合器C0而被啮合时,驱动动力在比发动机转速NE高的转速下从无级换档部分11输入到第七旋转元件RE7。由此,当第一离合器C1、第二离合器C2和切换制动器B0被啮合时,由(F)水平直线L4和(B)表示连接到输出轴22的第六旋转元件RE6的转速的垂直线Y6的交点,表示与第四档位4th相对应的输出轴22的转速。
因此,本变速器系统70包括用作差速部分或者第一换档部分的无级换档部分11和用作自动换档部分或者第二换档部分的有级换档部分72。所以,包括变速器系统70的驱动设备可以享有与包括变速器系统10的驱动设备的上述优点相同的优点。
<第三实施例>
图17示出了作为换档状态手动选择器一部分的交互转换式开关44(以下简称为开关44),其可由驾驶员手动操作来选择性地将动力分动器16切换到差速状态或非差速状态,即将变速器系统10、70选择性地切换到无级换档状态或者有级换档状态。在上述第一和第二实施例的每一个中,此开关44可以设置在混合动力车中,使得开关44可由驾驶员手动操作。此开关44允许驾驶员使车辆在不同换档控制模式中所期望或选择的一个控制模式中行驶车辆。开关44包括标有“有级”并对应于有级换档控制模式的第一部分,和标有“无级”并对应于无级换档控制模式的第二部分。当驾驶员推动开关44的第一或第二部分时,驾驶员可以选择无级换档控制模式(在此模式中变速器系统10、70被切换到无级换档状态以用作电控CVT)或者有级换档控制模式(在此模式中变速器系统10、70被切换到有级换档状态以用作有级变速器)。在第一和第二实施例的每一个中,根据例如图6或图7所示的状态切换图,基于车辆状态的改变,而自动地切换变速器系统10、70的换档状态。代替或者增加到此自动状态切换控制模式,第三实施例采用手动状态切换模式,其中通过操作开关44来手动切换变速器系统10、70的换档状态。也就是说,当开关44被手动操作以选择无级换档状态和有级换档状态中任一个时,切换控制装置50优先将变速器系统10、70切换到如此选择的换档状态中。例如,当驾驶员希望感觉电控CVT的操作和/或获得燃油消耗率改善效果时,驾驶员可以手动操作开关44来选择无级换档状态;而当驾驶员希望感觉由有级变速器的换档控制引起的发动机转速变化时,驾驶员可以手动操作开关44来选择有级换档状态。开关44可以被修改以能够选择性地采取中立操作位置,其不同于分别与无级换档状态和有级换档状态相对应的两个操作位置。在后一情况下,当开关44被操作来选择中立操作位置时,既不选择无级换档状态也不选择有级换档状态。因此,中立操作位置的选择表示驾驶员不希望选择无级换档状态和有级换档状态中的任何一个,即希望选择自动状态切换控制模式。
虽然已经在其优选实施例中说明了本发明,但应当理解到本发明可以以其他方式实施。
例如,在图示实施例的每一个所采用的图9流程图的步骤S1处,通过根据图6的状态切换图判断车辆状态是否处于其中变速器系统10、70应当被切换到有级换档状态的有级换档控制区域中,来判断车辆是否行驶在有级换档控制模式中。但是,可以通过判断开关44是否已经被驾驶员手动操作来将变速器系统10、70切换到有级换档控制状态,而判断车辆是否行驶在有级换档控制模式中。因此,本发明可以应用到车辆响应于开关44的手动操作而行驶在有级换档控制模式中的情况。
此外,在每个图示实施例中,变速器系统10、70被设置成这样,使得无级换档部分11可以被选择性地切换到差速状态和非差速状态,因此部分11可以被选择性地切换到其中部分11用作电控CVT的无级换档状态和其中部分11用作有级变速器的有级换档状态。但是,无级换档部分11在无级换档状态和有级换档状态之间的切换是无级换档部分11在差速状态和非差速状态之间的切换的一个示例。例如,当无级换档部分11处于差速状态时,部分11的速比可以不是被连续地改变而是有级地改变,使得部分11可以用作有级变速器。换言之,变速器系统10、70(或无级换档部分11)的差速和非差速状态不是分别一一对应于变速器系统10、70的无级和有级换档状态。所以,变速器系统10、70不需要设置成可选择性地切换到无级和有级换档状态。即,本发明可以应用到变速器系统10、70(无级换档部分11或动力分动器16)被设置成可选择性地切换到差速或非差速状态的情况。
此外,在每个图示实施例中,动力分动器16包括连接到发动机8的第一行星轮架CA1、连接到第一电动机M1的第一太阳轮S1和连接到传动构件18的第一齿圈R1。但是,发动机8、第一电动机M1和传动构件18可以以不同的方式连接到第一行星齿轮组24的三个元件CA1、S1、R1。例如,发动机8、第一电动机M1和传动构件18中的每一个都可以连接到三个元件CA1、S1、R1中的任一个。
在每个图示实施例中,发动机8直接与输入轴14耦合。但是,发动机8可通过齿轮、带等可操作地连接到输入轴14。而且,发动机8不需要被设置成与输入轴14共轴。
在每个图示实施例中,第一电动机M1和第二电动机M2与输入轴14共轴,第一电动机M1连接到第一太阳轮S1,而第二电动机M2连接到传动构件18。但是,第一电动机M1可以通过齿轮、带等可操作地连接到第一太阳轮S1;而第二电动机M2可以通过齿轮、带等可操作地连接到传动构件18。
在每个图示实施例中,动力分动器16包括切换离合器C0和切换制动器B0。但是,不必要采用离合器C0和制动器B0两者。此外,在每个图示实施例中,切换离合器C0选择性地将太阳轮S1和行星轮架CA1连接到彼此。但是,离合器C0可以被修改成离合器C0选择性地将太阳轮S1和齿圈R1连接到彼此,或者选择性地将行星轮架CA1和齿圈R1连接到彼此。简言之,切换离合器C0可以被修改成离合器C0选择性地连接第一行星齿轮组24的三个元件S1、CA1、R1中的任两个元件。
在每个图示实施例中,通过使切换离合器C0啮合而将变速器系统10、70控制到空档位置“N”。但是,可以不使离合器C0啮合而建立空档位置“N”。
在每个图示实施例中,例如切换离合器C0和切换制动器B0的液压操作摩擦耦合设备可以被例如粉(磁粉)离合器、电磁离合器或爪形离合器的磁粉式、电磁式或机械式耦合设备所代替。
在每个图示实施例中,变速器系统10、70不需要包括具有图示构造的无级换档部分11。即,本发明可以应用到至少一个电动机(例如第二电动机M2)连接到有级换档部分20、72的输入旋转构件(例如传动构件18)的情况。
在每个图示实施例中,第二电动机M2连接到传动构件18。但是,第二电动机M2可以连接到输出轴22,或者有级换档部分20、72的旋转元件中任一个。
在每个图示实施例中,有级换档部分20、72通过传动构件18串联连接到无级换档部分11。但是,可以设置平行于输入轴14延伸的副轴,并且将有级换档部分20、72设置成有级换档部分20、72与副轴共轴。在后一情况下,无级换档部分11和有级换档部分20、72可以通过例如包括一对反转齿轮、链轮和链条在内的一组传动构件连接到彼此,使得驱动动力可以从部分11传递到部分20、72。
在每个图示实施例中,作为差速设备的动力分动器16可以被例如差速齿轮单元所代替,该差速齿轮单元包括被发动机8驱动或旋转的主动齿轮、与主动齿轮啮合的一对斜齿轮、和可操作地连接到这两个斜齿轮的第一电动机M1和第二电动机M2。
在每个图示实施例中,动力分动器16由单个行星齿轮组构成。但是,动力分动器16可以由两个或更多行星齿轮组构成,使得动力分动器16在其非差速状态中可以用作具有三个或更多档位的变速器。
在每个图示实施例中,开关44是交互转换式的。但是,开关44可以被可操作来选择至少无级换档状态(差速状态)和有级换档状态(非差速状态)中任一个的任何类型的开关所代替,例如按钮式开关、不能同时保持在各自按压状态下的一对按钮式开关(即两者之一可以保持在其按压状态)、杠杆式开关、滑动式开关等。此外,在每个图示实施例中,开关44可以被修改为具有中立操作位置,如上所述。但是,代替开关44的此修改,可以采用另一种开关,其可操作来采取或者忽视通过操作开关44而选择的有级或无级换档状态,即选择旋转开关44的中立操作位置。
应当理解到,在上述本发明的技术教导的启示下,本发明可以用本领域技术人员可以想到的各种其他改变、修改和改进来实施。
本发明基于2004年6月3递交的日本专利申请No.2004-165806,其内容通过引用包含于此。
Claims (20)
1.一种控制装置(40、42、C0、B0),用于控制车辆的驱动设备(10、36;70),所述驱动设备包括变速器系统(10;70),所述变速器系统包括(A)无级换档部分(11)和(B)有级换档部分(20;72),所述无级换档部分包括(a1)具有连接到发动机(8)的第一旋转元件(RE1)、连接到第一电动机(M1)的第二旋转元件(RE2)和连接到传动构件(18)的第三旋转元件(RE3)这三者的差速设备(16),和(a2)设置在所述传动构件和多个驱动轮(38)之间的动力传动路径中的第二电动机(M2),并且所述无级换档部分用作电控无级变速器,所述有级换档部分构成所述动力传动路径的一部分并用作有级自动变速器,所述控制装置的特征在于包括:
差速状态切换设备(C0、B0),其与所述差速设备相关联,并且选择性地将所述差速设备切换到其中所述无级换档部分可以用作电控无级变速器的差速状态、和其中所述无级换档部分不能用作电控无级变速器的非差速状态;和
转速同步控制器(82、84、86),当进行所述变速器系统的有级换档控制时,所述转速同步控制器利用所述第一电动机和所述第二电动机中的至少一个,来进行所述第一旋转元件、第二旋转元件和第三旋转元件各自的转速到所述有级换档控制完成后其各自转速的同步控制。
2.一种控制装置(40、42、C0、B0),用于控制车辆的驱动设备(10、36;70),所述驱动设备包括变速器系统(10;70),所述变速器系统包括(A)无级换档部分(11)和(B)有级换档部分(20;72),所述无级换档部分包括(a1)具有连接到发动机(8)的第一旋转元件(RE1)、连接到第一电动机(M1)的第二旋转元件(RE2)和连接到传动构件(18)的第三旋转元件(RE3)这三者的差速设备(16),和(a2)设置在所述传动构件和多个驱动轮(38)之间的动力传动路径中的第二电动机(M2),并且所述无级换档部分用作电控无级变速器,所述有级换档部分构成所述动力传动路径的一部分并用作有级自动变速器,所述控制装置的特征在于包括:
差速状态切换设备(C0、B0),其与所述差速设备相关联,并且选择性地将所述差速设备切换到其中所述无级换档部分可以用作电控无级变速器的差速状态、和其中所述无级换档部分不能用作电控无级变速器的非差速状态;和
转速同步控制器(82、84、86),当进行所述变速器系统的有级换档控制时,所述转速同步控制器利用所述第一电动机和所述第二电动机中的至少一个,来进行所述发动机的转速到所述有级换档控制完成后其转速的同步控制。
3.根据权利要求1或2所述的控制装置,其中所述差速状态切换设备(C0、B0)选择性地建立其中所述第一旋转元件、第二旋转元件和第三旋转元件(RE1-RE3)作为一个单元旋转的第一非差速状态与其中所述第二旋转元件(RE2)不旋转的第二非差速状态中的一个作为所述非差速状态,并且其中当进行所述有级换档控制时,所述转速同步控制器(82、84、86)选择多种不同转速同步控制方法中与关于是否进行所述第一非差速状态和所述第二非差速状态之间的切换的判断相对应的一种方法。
4.根据权利要求3所述的控制装置,其中当进行所述有级换档控制时,所述转速同步控制器(82、84、86)在进行所述第一非差速状态和所述第二非差速状态之间的所述切换时,暂时将所述差速设备(16)切换到其所述差速状态,并由于作为所述电控无级变速器的所述无级换档部分(11)的操作而进行所述同步控制。
5.根据权利要求3所述的控制装置,其中当进行所述有级换档控制时,所述转速同步控制器(82、84、86)在不进行所述第一非差速状态和所述第二非差速状态之间的所述切换时,将所述差速设备(16)保持为其所述非差速状态,并进行所述同步控制。
6.根据权利要求3所述的控制装置,其中当所述第一电动机(M1)和所述第二电动机(M2)中至少一个不能使用时,所述转速同步控制器(82、84、86)进行以下两者之一,即所述有级换档部分(20;72)的所述有级换档控制以及所述第一非差速状态和所述第二非差速状态之间的所述切换。
7.根据权利要求3所述的控制装置,其中所述差速状态切换设备(C0、B0)包括(a)离合器(C0)和(b)制动器(B0)中至少一个,所述离合器将所述第一旋转元件、第二旋转元件和第三旋转元件(RE1-RE3)的至少两个旋转元件连接到彼此,以建立所述第一非差速状态,所述制动器将所述第二旋转元件(RE2)连接到非旋转元件以建立所述第二非差速状态。
8.根据权利要求7所述的控制装置,其中所述差速状态切换设备(C0、B0)包括所述离合器(C0)和所述制动器(B0),其中当所述离合器和所述制动器被松开时,所述差速设备(16)被切换到其所述差速状态,在所述差速状态中所述第一旋转元件、第二旋转元件和第三旋转元件(RE1-RE3)相对于彼此旋转并且所述无级换档部分(11)用作电控无级变速器,其中当所述离合器被啮合而所述制动器被松开时,所述差速设备被切换到其所述第一非差速状态并且所述无级换档部分用作速比等于1的变速器,并且其中当所述制动器被啮合而所述离合器被松开时,所述差速设备被切换到其所述第二非差速状态并且所述无级换档部分用作速比小于1的增速变速器。
9.根据权利要求1或2所述的控制装置,其中所述差速设备(16)包括具有行星轮架(CA1)、太阳轮(S1)和齿圈(R1)的行星齿轮组(24),并且所述差速设备的所述第一旋转元件、第二旋转元件和第三旋转元件(RE1-RE3)分别包括所述行星轮架、所述太阳轮和所述齿圈。
10.根据权利要求9所述的控制装置,其中所述行星齿轮组(24)包括具有行星齿轮(P1)的单级行星齿轮式行星齿轮组。
11.一种控制装置(40、42、C0、B0),用于控制车辆的驱动设备(10、36;70)的,所述驱动设备包括变速器系统(10;70),所述变速器系统包括(A)差速系统(11)和(B)有级换档部分(20;72),所述差速系统包括(a1)具有连接到发动机(8)的第一旋转元件(RE1)、连接到第一电动机(M1)的第二旋转元件(RE2)和连接到传动构件(18)的第三旋转元件(RE3)这三者的差速设备(16),和(a2)设置在所述传动构件和多个驱动轮(38)之间的动力传动路径中的第二电动机(M2),所述有级换档部分构成所述动力传动路径的一部分并用作有级自动变速器,所述控制装置的特征在于包括:
差速状态切换设备(C0、B0),其与所述差速设备相关联,并且选择性地将所述差速设备切换到其中所述差速系统表现出差速功能的差速状态、和其中所述差速系统不表现出所述差速功能的非差速状态;和
转速同步控制器(82、84、86),当进行所述变速器系统的有级换档控制时,所述转速同步控制器利用所述第一电动机和所述第二电动机中的至少一个,来进行所述第一旋转元件、第二旋转元件和第三旋转元件各自的转速到所述有级换档控制完成后其各自转速的同步控制。
12.一种控制装置(40、42、C0、B0),用于控制车辆的驱动设备(10、36;70),所述驱动设备包括变速器系统(10;70),所述变速器系统包括(A)差速系统(11)和(B)有级换档部分(20;72),所述差速系统包括(a1)具有连接到发动机(8)的第一旋转元件(RE1)、连接到第一电动机(M1)的第二旋转元件(RE2)和连接到传动构件(18)的第三旋转元件(RE3)的差速设备(16),和(a2)设置在所述传动构件和多个驱动轮(38)之间的动力传动路径中的第二电动机(M2),所述有级换档部分构成所述动力传动路径的一部分并用作有级自动变速器,所述控制装置的特征在于包括:
差速状态切换设备(C0、B0),其与所述差速设备相关联,并且选择性地将所述差速设备切换到其中所述差速系统表现出差速功能的差速状态,和其中所述差速系统不表现出所述差速功能的非差速状态;和
转速同步控制器(82、84、86),当进行所述变速器系统的有级换档控制时,所述转速同步控制器利用所述第一电动机和所述第二电动机中的至少一个,来进行所述发动机的转速到所述有级换档控制完成后其转速的同步控制。
13.根据权利要求11或12所述的控制装置,其中所述差速状态切换设备(C0、B0)选择性地建立其中所述第一旋转元件、第二旋转元件和第三旋转元件(RE1-RE3)作为一个单元旋转的第一非差速状态与其中所述第二旋转元件(RE2)不旋转的第二非差速状态中的一个作为所述非差速状态,并且其中当进行所述有级换档控制时,所述转速同步控制器(82、84、86)选择多种不同转速同步控制方法中与关于是否进行所述第一非差速状态和所述第二非差速状态之间的切换的判断相对应的一种方法。
14.根据权利要求13所述的控制装置,其中当进行所述有级换档控制时,所述转速同步控制器(82、84、86)在进行所述第一非差速状态和所述第二非差速状态之间的所述切换时,暂时将所述差速设备(16)切换到其所述差速状态,并进行所述同步控制。
15.根据权利要求13所述的控制装置,其中当进行所述有级换档控制时,所述转速同步控制器(82、84、86)在不进行所述第一非差速状态和所述第二非差速状态之间的所述切换时,将所述差速设备(16)保持为其所述非差速状态,并进行所述同步控制。
16.根据权利要求13所述的控制装置,其中当所述第一电动机(M1)和所述第二电动机(M2)中至少一个不能使用时,所述转速同步控制器(82、84、86)进行以下两者之一,即所述有级换档部分(20;72)的所述有级换档控制以及所述第一非差速状态和所述第二非差速状态之间的所述切换个。
17.根据权利要求13所述的控制装置,其中所述差速状态切换设备(C0、B0)包括(a)离合器(C0)和(b)制动器(B0)中至少一个,所述离合器将所述第一旋转元件、第二旋转元件和第三旋转元件(RE1-RE3)的至少两个旋转元件连接到彼此,以建立所述第一非差速状态,所述制动器将所述第二旋转元件(RE2)连接到非旋转元件以建立所述第二非差速状态。
18.根据权利要求1、2、11和12中任一项所述的控制装置,其中所述差速设备包括增速变速器(16)。
19.根据权利要求3所述的控制装置,其中所述差速状态切换设备(C0、B0)包括(a)离合器(C0)和(b)制动器(B0)中至少一个,所述离合器将所述第一旋转元件、第二旋转元件和第三旋转元件(RE1-RE3)的至少两个旋转元件连接到彼此,以建立所述第一非差速状态,所述制动器将所述第二旋转元件(RE2)连接到非旋转元件以建立所述第二非差速状态,并且其中当进行所述第一非差速状态和所述第二非差速状态之间的所述切换时,所述转速同步控制器(82、84、86)进行所述离合器和所述控制器中所述至少一个的快速控制。
20.根据权利要求13所述的控制装置,其中所述差速状态切换设备(C0、B0)包括(a)离合器(C0)和(b)制动器(B0)中至少一个,所述离合器将所述第一旋转元件、第二旋转元件和第三旋转元件(RE1-RE3)的至少两个旋转元件连接到彼此,以建立所述第一非差速状态,所述制动器将所述第二旋转元件(RE2)连接到非旋转元件以建立所述第二非差速状态,并且其中当进行所述第一非差速状态和所述第二非差速状态之间的所述切换时,所述转速同步控制器(82、84、86)进行所述离合器和所述控制器中所述至少一个的快速控制。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP165806/2004 | 2004-06-03 | ||
| JP2004165806A JP4155230B2 (ja) | 2004-06-03 | 2004-06-03 | 車両用駆動装置の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1704633A CN1704633A (zh) | 2005-12-07 |
| CN100427813C true CN100427813C (zh) | 2008-10-22 |
Family
ID=35449707
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2005100748831A Active CN100427813C (zh) | 2004-06-03 | 2005-06-03 | 用于控制车辆驱动设备的控制装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7226385B2 (zh) |
| JP (1) | JP4155230B2 (zh) |
| CN (1) | CN100427813C (zh) |
| DE (1) | DE102005025654B4 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101825174A (zh) * | 2010-03-09 | 2010-09-08 | 西南大学 | 发动机自适应传动传感电控自动变速装置 |
Families Citing this family (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7449793B2 (en) * | 2004-02-18 | 2008-11-11 | Bluwav Systems, Llc | Portable range extender with autonomous control of starting and stopping operations |
| JP3915809B2 (ja) * | 2004-09-21 | 2007-05-16 | トヨタ自動車株式会社 | リーンリミットを低電力消費にて達成するハイブリッド車 |
| US7832297B2 (en) | 2005-04-19 | 2010-11-16 | Hewatt Chris B | Method and apparatus for gyroscopic propulsion |
| JP4581855B2 (ja) * | 2005-06-07 | 2010-11-17 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| US7367910B2 (en) * | 2005-09-22 | 2008-05-06 | General Motors Corporation | One-mode input-split electro-mechanical transmission with two fixed speed ratios |
| US7445578B2 (en) * | 2006-01-03 | 2008-11-04 | Toyota Jidosha Kabushiki Kaisha | Control device for vehicular drive system |
| JP4215070B2 (ja) * | 2006-04-26 | 2009-01-28 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| US7497797B2 (en) * | 2006-06-27 | 2009-03-03 | Gm Global Technology Operations, Inc. | Electrically variable transmission having at least three planetary gear sets and one fixed interconnection |
| US7507174B2 (en) * | 2006-07-14 | 2009-03-24 | Gm Global Technology Operations, Inc. | Electrically variable transmission having three planetary gear sets |
| US7717823B2 (en) * | 2006-11-27 | 2010-05-18 | Zf Friedrichshafen Ag | Method and apparatus for changing shift scheduling modes of automated mechanical transmission |
| US7597648B2 (en) * | 2006-11-28 | 2009-10-06 | Gm Global Technology Operations, Inc. | Input brake providing electric only fixed gear |
| JP5074758B2 (ja) * | 2006-12-19 | 2012-11-14 | トヨタ自動車株式会社 | 車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体、車両用の駆動装置 |
| JP4470938B2 (ja) | 2006-12-21 | 2010-06-02 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP4962000B2 (ja) * | 2006-12-25 | 2012-06-27 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP4311451B2 (ja) * | 2007-01-16 | 2009-08-12 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP5151160B2 (ja) * | 2007-01-26 | 2013-02-27 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP4483871B2 (ja) * | 2007-02-05 | 2010-06-16 | トヨタ自動車株式会社 | 動力伝達装置の制御装置およびその制御方法 |
| JP4447613B2 (ja) * | 2007-02-08 | 2010-04-07 | トヨタ自動車株式会社 | ハイブリッド車両の駆動力制御装置 |
| FR2912963B1 (fr) * | 2007-02-26 | 2009-04-10 | Renault Sas | Transmission hybride infiniment variable a deux modes de fonctionnement hybrides avec train supplentaire inverseur et groupe motopropulseur a derivation de puissance |
| EP2125471A2 (fr) * | 2007-02-26 | 2009-12-02 | Renault SAS | Transmission hybride infiniment variable a trois modes de fonctionnement hybrides et groupe motopropulseur a derivation de puissance |
| US8113981B2 (en) * | 2007-11-02 | 2012-02-14 | Magna Powertrain Usa, Inc. | Multi-speed epicyclic powershift transmission |
| JP5181739B2 (ja) * | 2008-03-07 | 2013-04-10 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| FR2930749B1 (fr) * | 2008-05-05 | 2010-04-30 | Renault Sas | Systeme et procede de commande de changement de mode d'une transmission infiniment variable en mode purement electrique |
| JP4774108B2 (ja) * | 2009-03-02 | 2011-09-14 | 日産自動車株式会社 | 自動変速機の制御装置 |
| JP4907680B2 (ja) * | 2009-03-06 | 2012-04-04 | 日産自動車株式会社 | 自動変速機の制御装置 |
| JP4907681B2 (ja) * | 2009-03-06 | 2012-04-04 | 日産自動車株式会社 | 自動変速機の制御装置 |
| JP4970480B2 (ja) * | 2009-03-06 | 2012-07-04 | 日産自動車株式会社 | 自動変速機の制御装置 |
| CN102112783B (zh) * | 2009-04-23 | 2013-11-27 | 丰田自动车株式会社 | 车辆用变速机的变速控制装置 |
| JP5459073B2 (ja) * | 2010-05-27 | 2014-04-02 | トヨタ自動車株式会社 | 車両の制御装置 |
| DE102010063029A1 (de) * | 2010-12-14 | 2012-06-14 | Zf Friedrichshafen Ag | Verfahren zum Betreiben einer Getriebevorrichtung eines Fahrzeugantriebsstranges |
| JP5801669B2 (ja) * | 2011-09-21 | 2015-10-28 | ダイムラー・アクチェンゲゼルシャフトDaimler AG | ハイブリッド車両の制御装置 |
| JP5786692B2 (ja) * | 2011-12-02 | 2015-09-30 | トヨタ自動車株式会社 | ハイブリッド車両の駆動装置 |
| KR20130066225A (ko) * | 2011-12-12 | 2013-06-20 | 현대자동차주식회사 | 하이브리드 시스템의 동력 구조 |
| JP5883659B2 (ja) * | 2012-01-20 | 2016-03-15 | 富士重工業株式会社 | 車両、及び車両用制御装置 |
| DE102012216305B4 (de) * | 2012-09-13 | 2023-10-05 | Zf Friedrichshafen Ag | Verfahren sowie Steuerungseinrichtung zum Ansteuern eines formschlüssigen Schaltelements eines Getriebes |
| CN102975609A (zh) * | 2012-12-03 | 2013-03-20 | 湖南大学 | 基于磁齿轮的混合动力车传动模块 |
| JP5806246B2 (ja) * | 2013-02-12 | 2015-11-10 | トヨタ自動車株式会社 | 車両の制御装置 |
| DE102013218554A1 (de) * | 2013-09-17 | 2015-03-19 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Überwachen eines Antriebs eines Kraftfahrzeugs |
| JP6167806B2 (ja) * | 2013-09-27 | 2017-07-26 | 株式会社豊田中央研究所 | 動力伝達装置 |
| KR101490954B1 (ko) * | 2013-12-02 | 2015-02-06 | 현대자동차 주식회사 | 하이브리드 차량의 토크 저감 제어 방법 |
| JP6320280B2 (ja) * | 2014-11-28 | 2018-05-09 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置の制御装置 |
| US9927006B2 (en) * | 2015-09-01 | 2018-03-27 | Achates Power, Inc. | Multi-speed planetary drive for a supercharger |
| JP6337880B2 (ja) * | 2015-12-24 | 2018-06-06 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| DE102016209068B4 (de) * | 2016-05-25 | 2020-07-23 | Bayerische Motoren Werke Aktiengesellschaft | Schaltbares Getriebe |
| JP6567782B2 (ja) * | 2016-11-21 | 2019-08-28 | ジヤトコ株式会社 | 無段変速機の変速制御装置および変速制御方法 |
| JP6544345B2 (ja) * | 2016-11-29 | 2019-07-17 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| CN110603182B (zh) | 2017-01-20 | 2022-11-22 | 北极星工业有限公司 | 无级变速器的诊断方法 |
| DE102017217133A1 (de) * | 2017-09-26 | 2019-03-28 | Bayerische Motoren Werke Aktiengesellschaft | Automatikgetriebe für ein Kraftfahrzeug und Verfahren zum Schalten eines Automatikgetriebes |
| DE102017221941A1 (de) * | 2017-12-05 | 2019-06-06 | Volkswagen Aktiengesellschaft | Betriebsverfahren für einen Antriebsstrang, Antriebsstrang und Fahrzeug |
| JP6891794B2 (ja) * | 2017-12-20 | 2021-06-18 | トヨタ自動車株式会社 | 車両の駆動力制御装置 |
| CN114562559B (zh) * | 2022-03-23 | 2024-04-26 | 广汽埃安新能源汽车有限公司 | 两挡电机的空挡控制方法、装置、电子设备及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11198668A (ja) * | 1998-01-12 | 1999-07-27 | Fuji Heavy Ind Ltd | ハイブリッド車 |
| JP2003127681A (ja) * | 2001-10-22 | 2003-05-08 | Toyota Motor Corp | 変速機を備えたハイブリッド車駆動構造 |
| JP2003130203A (ja) * | 2001-10-22 | 2003-05-08 | Toyota Motor Corp | 変速機付きハイブリッド車駆動構造の運転方法 |
| JP2003130202A (ja) * | 2001-10-22 | 2003-05-08 | Toyota Motor Corp | 変速機付きハイブリッド車駆動構造の運転方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3409523B2 (ja) * | 1995-08-02 | 2003-05-26 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置の制御装置 |
| JPH10243502A (ja) | 1997-02-26 | 1998-09-11 | Aisin Aw Co Ltd | 車両用駆動装置の制御装置 |
| US20020025507A1 (en) | 1999-03-08 | 2002-02-28 | Yong Pan | Polymers as a support for combinatorial synthesis |
| JP3677733B2 (ja) * | 2000-04-06 | 2005-08-03 | ジヤトコ株式会社 | パラレルハイブリッド車両 |
| US6579201B2 (en) * | 2000-08-22 | 2003-06-17 | New Venture Gear, Inc. | Electric hybrid four-wheel drive vehicle |
| JP4306597B2 (ja) * | 2004-02-25 | 2009-08-05 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
-
2004
- 2004-06-03 JP JP2004165806A patent/JP4155230B2/ja active Active
-
2005
- 2005-06-01 US US11/140,992 patent/US7226385B2/en active Active
- 2005-06-03 CN CNB2005100748831A patent/CN100427813C/zh active Active
- 2005-06-03 DE DE102005025654.6A patent/DE102005025654B4/de active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11198668A (ja) * | 1998-01-12 | 1999-07-27 | Fuji Heavy Ind Ltd | ハイブリッド車 |
| JP2003127681A (ja) * | 2001-10-22 | 2003-05-08 | Toyota Motor Corp | 変速機を備えたハイブリッド車駆動構造 |
| JP2003130203A (ja) * | 2001-10-22 | 2003-05-08 | Toyota Motor Corp | 変速機付きハイブリッド車駆動構造の運転方法 |
| JP2003130202A (ja) * | 2001-10-22 | 2003-05-08 | Toyota Motor Corp | 変速機付きハイブリッド車駆動構造の運転方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101825174A (zh) * | 2010-03-09 | 2010-09-08 | 西南大学 | 发动机自适应传动传感电控自动变速装置 |
| CN101825174B (zh) * | 2010-03-09 | 2013-04-24 | 西南大学 | 发动机自适应传动传感电控自动变速装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050272555A1 (en) | 2005-12-08 |
| JP2005344850A (ja) | 2005-12-15 |
| US7226385B2 (en) | 2007-06-05 |
| DE102005025654A1 (de) | 2006-03-16 |
| CN1704633A (zh) | 2005-12-07 |
| DE102005025654B4 (de) | 2022-06-30 |
| JP4155230B2 (ja) | 2008-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100427813C (zh) | 用于控制车辆驱动设备的控制装置 | |
| CN100455855C (zh) | 用于车辆驱动设备的控制装置 | |
| CN100509513C (zh) | 控制车辆驱动设备的控制设备及包括其的车辆驱动系统 | |
| CN100547266C (zh) | 用于车辆驱动系统的控制设备 | |
| CN101180197B (zh) | 用于车辆用驱动系统的控制设备 | |
| CN101242980B (zh) | 用于车辆用驱动系统的控制设备 | |
| CN100546854C (zh) | 车用驱动系统的控制设备 | |
| CN100377902C (zh) | 车用驱动系统的控制设备 | |
| CN101133268B (zh) | 车用驱动设备的控制设备 | |
| CN101795916B (zh) | 车辆用自动变速器的控制装置 | |
| CN102092276B (zh) | 用于车辆用驱动装置的控制装置 | |
| CN101066675B (zh) | 混合动力车辆的传动状态切换控制装置 | |
| CN101348114B (zh) | 用于车辆驱动系统的控制装置 | |
| CN101209707B (zh) | 用于车辆驱动系统的控制装置 | |
| CN100540348C (zh) | 用于车辆用驱动系统的控制设备 | |
| CN101588951B (zh) | 车辆用驱动装置的控制装置 | |
| CN101178123B (zh) | 用于车辆驱动系统的控制设备 | |
| CN100377901C (zh) | 车用变速器机构的控制设备 | |
| CN102348587B (zh) | 动力传递装置的控制装置 | |
| CN101254786A (zh) | 车辆驱动系统的控制系统及控制方法 | |
| CN102427979A (zh) | 车辆用动力传递装置的控制装置 | |
| CN101311015A (zh) | 用于车辆动力传递系统的控制装置 | |
| CN101296831A (zh) | 自动变速器的变速控制系统 | |
| CN101196152A (zh) | 用于车辆用驱动装置的控制装置和控制方法 | |
| CN102227344A (zh) | 车辆用动力传递装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |