JP4306597B2 - 車両用駆動装置の制御装置 - Google Patents
車両用駆動装置の制御装置 Download PDFInfo
- Publication number
- JP4306597B2 JP4306597B2 JP2004342882A JP2004342882A JP4306597B2 JP 4306597 B2 JP4306597 B2 JP 4306597B2 JP 2004342882 A JP2004342882 A JP 2004342882A JP 2004342882 A JP2004342882 A JP 2004342882A JP 4306597 B2 JP4306597 B2 JP 4306597B2
- Authority
- JP
- Japan
- Prior art keywords
- switching
- state
- transmission
- engagement
- electric motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 725
- 230000007246 mechanism Effects 0.000 claims abstract description 310
- 230000001360 synchronised effect Effects 0.000 claims description 31
- 230000009699 differential effect Effects 0.000 claims description 17
- 238000006243 chemical reaction Methods 0.000 abstract description 152
- 230000035939 shock Effects 0.000 abstract description 60
- 230000003578 releasing effect Effects 0.000 abstract description 27
- 230000008878 coupling Effects 0.000 abstract description 6
- 238000010168 coupling process Methods 0.000 abstract description 6
- 238000005859 coupling reaction Methods 0.000 abstract description 6
- 230000009467 reduction Effects 0.000 abstract description 3
- 230000009471 action Effects 0.000 abstract description 2
- 230000006872 improvement Effects 0.000 abstract description 2
- 230000008859 change Effects 0.000 description 148
- 230000006870 function Effects 0.000 description 72
- 238000010586 diagram Methods 0.000 description 49
- 239000000446 fuel Substances 0.000 description 40
- 238000000034 method Methods 0.000 description 28
- 230000008569 process Effects 0.000 description 28
- 230000006866 deterioration Effects 0.000 description 12
- 238000010248 power generation Methods 0.000 description 12
- 230000007423 decrease Effects 0.000 description 10
- 230000000694 effects Effects 0.000 description 10
- 230000007935 neutral effect Effects 0.000 description 10
- 230000000994 depressogenic effect Effects 0.000 description 9
- 230000008901 benefit Effects 0.000 description 7
- 230000001629 suppression Effects 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 5
- 230000005611 electricity Effects 0.000 description 5
- 230000003247 decreasing effect Effects 0.000 description 3
- 239000003054 catalyst Substances 0.000 description 2
- 239000006247 magnetic powder Substances 0.000 description 2
- 230000001020 rhythmical effect Effects 0.000 description 2
- 241001481833 Coryphaena hippurus Species 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- OOYGSFOGFJDDHP-KMCOLRRFSA-N kanamycin A sulfate Chemical group OS(O)(=O)=O.O[C@@H]1[C@@H](O)[C@H](O)[C@@H](CN)O[C@@H]1O[C@H]1[C@H](O)[C@@H](O[C@@H]2[C@@H]([C@@H](N)[C@H](O)[C@@H](CO)O2)O)[C@H](N)C[C@@H]1N OOYGSFOGFJDDHP-KMCOLRRFSA-N 0.000 description 1
- 230000009347 mechanical transmission Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images



























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
- B60K6/365—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings with the gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
- B60K6/547—Transmission for changing ratio the transmission being a stepped gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/101—Infinitely variable gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/441—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/443—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/48—Drive Train control parameters related to transmissions
- B60L2240/486—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/50—Drive Train control parameters related to clutches
- B60L2240/507—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/12—Driver interactions by confirmation, e.g. of the input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/26—Transition between different drive modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2270/00—Problem solutions or means not otherwise provided for
- B60L2270/10—Emission reduction
- B60L2270/14—Emission reduction of noise
- B60L2270/145—Structure borne vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/06—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts
- F16H37/08—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing
- F16H37/0833—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths
- F16H37/084—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths at least one power path being a continuously variable transmission, i.e. CVT
- F16H2037/0866—Power split variators with distributing differentials, with the output of the CVT connected or connectable to the output shaft
- F16H2037/0873—Power split variators with distributing differentials, with the output of the CVT connected or connectable to the output shaft with switching, e.g. to change ranges
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/12—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures
- F16H2061/1208—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures with diagnostic check cycles; Monitoring of failures
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/12—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures
- F16H2061/122—Avoiding failures by using redundant parts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/12—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures
- F16H2061/1256—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures characterised by the parts or units where malfunctioning was assumed or detected
- F16H2061/1272—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures characterised by the parts or units where malfunctioning was assumed or detected the failing part is a part of the final output mechanism, e.g. shift rods or forks
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/003—Transmissions for multiple ratios characterised by the number of forward speeds
- F16H2200/0043—Transmissions for multiple ratios characterised by the number of forward speeds the gear ratios comprising four forward speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/003—Transmissions for multiple ratios characterised by the number of forward speeds
- F16H2200/0047—Transmissions for multiple ratios characterised by the number of forward speeds the gear ratios comprising five forward speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/20—Transmissions using gears with orbital motion
- F16H2200/2002—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears
- F16H2200/201—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears with three sets of orbital gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/20—Transmissions using gears with orbital motion
- F16H2200/2002—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears
- F16H2200/2012—Transmissions using gears with orbital motion characterised by the number of sets of orbital gears with four sets of orbital gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/44—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion
- F16H3/72—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously
- F16H3/727—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously with at least two dynamo electric machines for creating an electric power path inside the gearing, e.g. using generator and motor for a variable power torque path
- F16H3/728—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously with at least two dynamo electric machines for creating an electric power path inside the gearing, e.g. using generator and motor for a variable power torque path with means to change ratio in the mechanical gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/0437—Smoothing ratio shift by using electrical signals
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Sustainable Energy (AREA)
- Sustainable Development (AREA)
- Life Sciences & Earth Sciences (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Transmission Device (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Structure Of Transmissions (AREA)
Description
ここで、請求項1にかかる発明の要旨とするところは、エンジンの出力を駆動輪へ伝達する車両用駆動装置の制御装置であって、(a) 前記エンジンに連結された第1要素と第1電動機に連結された第2要素と第2電動機および伝達部材に連結された第3要素とを有するとともにその第1要素乃至第3要素のうちのいずれか2つを相互にまたはその第2要素を非回転部材に連結する係合装置を有する動力分配機構を備え、電気的な無段変速機として作動可能な無段変速状態と有段の変速機として作動可能な有段変速状態とに切り換え可能な変速状態切換型変速機構と、(b) 車両の所定条件に基づいて前記係合装置の解放と係合とを切換制御することで前記変速状態切換型変速機構を前記無段変速状態と前記有段変速状態とのいずれかに選択的に切り換える切換制御手段と、(c) 前記係合装置の係合に際して前記第1要素、第2要素、および第3要素の相互の回転速度差或いは前記第2要素と前記非回転部材との回転速度差を抑制するように前記第1電動機による回転同期制御を行う電動機制御手段とを、含み、(d) 前記切換制御手段による前記変速状態切換型変速機構の前記無段変速状態から有段変速状態への切換制御において、その有段変速状態への切換えが実行される場合には、前記電動機制御手段による回転同期制御中であって、前記係合装置の係合圧を係合完了後の係合圧に向かって上昇させる前に所定の係合圧にて低圧待機させることにある。
このようにすれば、エンジンに連結された第1要素と第1電動機に連結された第2要素と第2電動機および伝達部材に連結された第3要素とを有するとともにその第1要素乃至第3要素のうちのいずれか2つを相互にまたはその第2要素を非回転部材に連結する係合装置を有する動力分配機構を備え、電気的な無段変速機として作動可能な無段変速状態と有段の変速機として作動可能な有段変速状態とに切り換え可能な変速状態切換型変速機構における、切換制御手段による前記係合装置の係合に際して3つの要素の相互の回転速度差或いは第2要素と非回転部材との回転速度差を抑制するように前記第1電動機による回転同期制御が行われるので、回転要素の回転速度が有段変速状態とされるときの回転速度に向かって制御されて係合装置の係合による回転速度差の回転同期に伴う切換ショックが抑制され、また係合装置の半係合状態での係合装置自体の回転速度差が抑制されることでその係合装置の仕事量が抑制されて係合装置の耐久性が向上する。また、3つの要素と係合装置により動力分配機構が簡単に構成されるとともに、切換制御手段により係合装置が制御されることにより変速状態切換型変速機構が無段変速状態と有段変速状態とに簡単に切り換えられる。また、前記変速状態切換型変速機構の前記無段変速状態から有段変速状態への切換えが実行される場合には、前記電動機制御手段による回転同期制御中であって、前記係合装置の係合圧が係合完了後の係合圧に向かって上昇させられる前に所定の係合圧にて低圧待機させられるので、係合装置の係合圧を係合完了後の係合圧に向かって上昇させる際に、より早く係合装置にトルク容量を持たせることができる。また、その分だけ係合装置がより早く係合完了させられる。これにより、例えば、前記係合装置の係合に際して電動機の電動機制御と係合装置の係合制御とが重なって実行される所謂オーバーラップ制御が行われる場合にはそのオーバーラップ制御がより早く実行される。
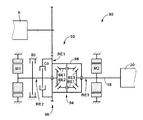
また、請求項2にかかる発明の要旨とするところは、エンジンの出力を第1電動機および伝達部材へ分配するとともに複数の回転要素を有する差動機構を有して電気的な差動装置として作動可能な差動部を備えた車両用駆動装置の制御装置であって、(a) 駆動輪に動力伝達可能とされた第2電動機と、(b) 前記差動機構に備えられ、前記差動部を電気的な差動装置として作動可能な差動作用が働く差動状態とその差動作用をしないロック状態とに切り換えるための係合装置と、(c) 車両の所定条件に基づいて前記係合装置の解放と係合とを切換制御することで前記差動部を前記差動状態と前記ロック状態とのいずれかに選択的に切り換える切換制御手段と、(d) その切換制御手段による前記係合装置の係合に際して前記複数の回転要素の相互の回転速度差或いはその第1電動機が連結されるその回転要素と非回転部材との回転速度差を抑制するようにその第1電動機による回転同期制御を行う電動機制御手段とを、含み、(e) 前記切換制御手段による前記差動部の前記差動状態からロック状態への切換制御において、そのロック状態への切換えが実行される場合には、前記電動機制御手段による回転同期制御中であって、前記係合装置の係合圧を係合完了後の係合圧に向かって上昇させる前に所定の係合圧にて低圧待機させることにある。
このようにすれば、前記差動部を電気的な差動装置として作動可能な差動作用が働く差動状態とその差動作用をしないロック状態とに切り換えるための前記係合装置が備えられることで、切換制御手段により車両の所定条件に基づいてその係合装置の解放と係合とが切換制御されて前記差動部が前記差動状態と前記ロック状態とのいずれかに選択的に切り換えられる。また、前記差動状態と前記ロック状態とに切換え可能に構成される差動部を備えた駆動装置において、その切換制御手段による前記係合装置の係合に際して前記複数の回転要素の相互の回転速度差或いはその第1電動機が連結されるその回転要素と非回転部材との回転速度差を抑制するようにその第1電動機による回転同期制御が行われるので、前記係合装置の係合時には複数の回転要素の回転速度が係合完了後の回転速度すなわちロック状態とされるときの回転速度に向かって回転制御されて係合装置の係合による回転速度差の回転同期に伴う切換ショックが抑制され、また係合装置の半係合状態での係合装置自体の回転速度差が抑制されることでその係合装置の仕事量が抑制されて係合装置の耐久性が向上する。また、前記差動部の前記差動状態からロック状態への切換えが実行される場合には、前記電動機制御手段による回転同期制御中であって、前記係合装置の係合圧が係合完了後の係合圧に向かって上昇させられる前に所定の係合圧にて低圧待機させられるので、係合装置の係合圧を係合完了後の係合圧に向かって上昇させる際に、より早く係合装置にトルク容量を持たせることができる。また、その分だけ係合装置がより早く係合完了させられる。これにより、例えば、前記係合装置の係合に際して電動機の電動機制御と係合装置の係合制御とが重なって実行される所謂オーバーラップ制御が行われる場合にはそのオーバーラップ制御がより早く実行される。
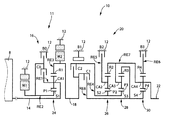
10、70:変速状態切換型変速機構(駆動装置)
11:切換型変速部(差動部)
12:トランスミッションケース(非回転部材)
16、92:動力分配機構(差動機構)
18:伝達部材
20、72:自動変速部(有段式自動変速機)
24:第1遊星歯車装置(シングルピニオン型遊星歯車装置)
38:駆動輪
50:切換制御手段
82:電動機制御手段
88:エンジン出力制御手段
94:かさ歯車式の差動歯車装置
M1:第1電動機
M2:第2電動機
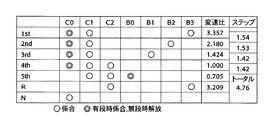
C0:切換クラッチ(係合装置)
B0:切換ブレーキ(係合装置)
Claims (2)
- エンジンの出力を駆動輪へ伝達する車両用駆動装置の制御装置であって、
前記エンジンに連結された第1要素と第1電動機に連結された第2要素と第2電動機および伝達部材に連結された第3要素とを有するとともに該第1要素乃至第3要素のうちのいずれか2つを相互にまたは該第2要素を非回転部材に連結する係合装置を有する動力分配機構を備え、電気的な無段変速機として作動可能な無段変速状態と有段の変速機として作動可能な有段変速状態とに切り換え可能な変速状態切換型変速機構と、
車両の所定条件に基づいて前記係合装置の解放と係合とを切換制御することで前記変速状態切換型変速機構を前記無段変速状態と前記有段変速状態とのいずれかに選択的に切り換える切換制御手段と、
前記係合装置の係合に際して前記第1要素、第2要素、および第3要素の相互の回転速度差或いは前記第2要素と前記非回転部材との回転速度差を抑制するように前記第1電動機による回転同期制御を行う電動機制御手段と
を、含み、
前記切換制御手段による前記変速状態切換型変速機構の前記無段変速状態から有段変速状態への切換制御において、該有段変速状態への切換えが実行される場合には、前記電動機制御手段による回転同期制御中であって、前記係合装置の係合圧を係合完了後の係合圧に向かって上昇させる前に所定の係合圧にて低圧待機させることを特徴とする車両用駆動装置の制御装置。 - エンジンの出力を第1電動機および伝達部材へ分配するとともに複数の回転要素を有する差動機構を有して電気的な差動装置として作動可能な差動部を備えた車両用駆動装置の制御装置であって、
駆動輪に動力伝達可能とされた第2電動機と、
前記差動機構に備えられ、前記差動部を電気的な差動装置として作動可能な差動作用が働く差動状態と該差動作用をしないロック状態とに切り換えるための係合装置と、
車両の所定条件に基づいて前記係合装置の解放と係合とを切換制御することで前記差動部を前記差動状態と前記ロック状態とのいずれかに選択的に切り換える切換制御手段と、
該切換制御手段による前記係合装置の係合に際して前記複数の回転要素の相互の回転速度差或いは該第1電動機が連結される該回転要素と非回転部材との回転速度差を抑制するように該第1電動機による回転同期制御を行う電動機制御手段と
を、含み、
前記切換制御手段による前記差動部の前記差動状態からロック状態への切換制御において、該ロック状態への切換えが実行される場合には、前記電動機制御手段による回転同期制御中であって、前記係合装置の係合圧を係合完了後の係合圧に向かって上昇させる前に所定の係合圧にて低圧待機させることを特徴とする車両用駆動装置の制御装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004342882A JP4306597B2 (ja) | 2004-02-25 | 2004-11-26 | 車両用駆動装置の制御装置 |
| DE602005014947T DE602005014947D1 (de) | 2004-02-25 | 2005-02-23 | Steuerungsvorrichtung für ein Kraftfahrzeugantriebssystem |
| EP05719740A EP1728665B1 (en) | 2004-02-25 | 2005-02-23 | Control device for vehicular drive system |
| PCT/JP2005/003425 WO2005080112A1 (ja) | 2004-02-25 | 2005-02-23 | 車両用駆動装置の制御装置 |
| KR1020067019792A KR100851265B1 (ko) | 2004-02-25 | 2005-02-23 | 차량 구동 시스템의 제어 장치 |
| US11/062,880 US7252619B2 (en) | 2004-02-25 | 2005-02-23 | Control device for vehicular drive system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004050532 | 2004-02-25 | ||
| JP2004342882A JP4306597B2 (ja) | 2004-02-25 | 2004-11-26 | 車両用駆動装置の制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005278387A JP2005278387A (ja) | 2005-10-06 |
| JP2005278387A5 JP2005278387A5 (ja) | 2007-12-20 |
| JP4306597B2 true JP4306597B2 (ja) | 2009-08-05 |
Family
ID=34889384
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004342882A Active JP4306597B2 (ja) | 2004-02-25 | 2004-11-26 | 車両用駆動装置の制御装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7252619B2 (ja) |
| EP (1) | EP1728665B1 (ja) |
| JP (1) | JP4306597B2 (ja) |
| KR (1) | KR100851265B1 (ja) |
| DE (1) | DE602005014947D1 (ja) |
| WO (1) | WO2005080112A1 (ja) |
Families Citing this family (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7822524B2 (en) * | 2003-12-26 | 2010-10-26 | Toyota Jidosha Kabushiki Kaisha | Vehicular drive system |
| JP4155230B2 (ja) * | 2004-06-03 | 2008-09-24 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| DE102005030603B8 (de) * | 2004-07-01 | 2015-02-19 | Toyota Jidosha Kabushiki Kaisha | Steuervorrichtung für ein Fahrzeugantriebssystem |
| JP4274100B2 (ja) * | 2004-10-12 | 2009-06-03 | 日産自動車株式会社 | エンジンの制御装置 |
| US7832297B2 (en) | 2005-04-19 | 2010-11-16 | Hewatt Chris B | Method and apparatus for gyroscopic propulsion |
| JP4244961B2 (ja) * | 2005-05-26 | 2009-03-25 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP4457981B2 (ja) * | 2005-05-26 | 2010-04-28 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| DE112006001409B4 (de) * | 2005-05-30 | 2019-10-31 | Toyota Jidosha Kabushiki Kaisha | Steuervorrichtung für Fahrzeugschaltmechanismus |
| JP4581855B2 (ja) * | 2005-06-07 | 2010-11-17 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| US7494435B2 (en) * | 2005-08-18 | 2009-02-24 | Gm Global Technology Operations, Inc. | Electrically variable transmission having three planetary gear sets with two fixed interconnections |
| US7282004B2 (en) * | 2005-08-30 | 2007-10-16 | Gm Global Technology Operations, Inc. | Electrically variable transmission having three interconnected planetary gearsets, a stationary member and a fixed input |
| US7367910B2 (en) * | 2005-09-22 | 2008-05-06 | General Motors Corporation | One-mode input-split electro-mechanical transmission with two fixed speed ratios |
| US7393297B2 (en) * | 2005-11-15 | 2008-07-01 | Gm Global Technology Operations, Inc. | Electrically variable transmissions with three interconnected gearsets |
| US7396305B2 (en) * | 2006-02-21 | 2008-07-08 | Gm Global Technology Operations, Inc. | Electrically variable transmission having three planetary gear sets, a stationary member and three fixed interconnections |
| DE102006011805A1 (de) * | 2006-03-15 | 2007-10-04 | Zf Friedrichshafen Ag | Verfahren und Vorrichtung zur Ansteuerung einer Schaltungsanordnung mit elektrischen Stellgliedern |
| US7722497B2 (en) * | 2006-06-13 | 2010-05-25 | Toyota Jidosha Kabushiki Kaisha | Control device for vehicle drive apparatus |
| JP4501925B2 (ja) * | 2006-11-09 | 2010-07-14 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP2010511553A (ja) * | 2006-12-08 | 2010-04-15 | ビーワイディー カンパニー リミテッド | ハイブリッド出力取り出し装置 |
| KR100862432B1 (ko) * | 2006-12-15 | 2008-10-08 | 현대자동차주식회사 | Etc가 탑재된 하이브리드 전기자동차의 엔진 토크 제어방법 |
| US7869926B2 (en) * | 2006-12-19 | 2011-01-11 | Chrysler Group Llc | Fixed speed operation in a hybrid transmission |
| JP4305522B2 (ja) | 2007-02-14 | 2009-07-29 | トヨタ自動車株式会社 | パワートレーンの制御装置 |
| US8172720B2 (en) * | 2007-03-05 | 2012-05-08 | Tai-Her Yang | Differential generation power distribution system |
| JP4483879B2 (ja) * | 2007-03-09 | 2010-06-16 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP4998072B2 (ja) | 2007-04-27 | 2012-08-15 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP2008296610A (ja) * | 2007-05-29 | 2008-12-11 | Toyota Motor Corp | 車両用動力伝達装置の制御装置 |
| US8221285B2 (en) | 2007-11-04 | 2012-07-17 | GM Global Technology Operations LLC | Method and apparatus to offload offgoing clutch torque with asynchronous oncoming clutch torque, engine and motor torque for a hybrid powertrain system |
| JP4450068B2 (ja) | 2007-12-25 | 2010-04-14 | トヨタ自動車株式会社 | ハイブリッド駆動装置の制御装置 |
| JP5119023B2 (ja) * | 2008-03-28 | 2013-01-16 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| FR2929574B1 (fr) * | 2008-04-07 | 2010-08-27 | Renault Sas | Systeme et procede de commande d'une transmission infiniment variable a modes multiples pour vehicule hybride. |
| US20110160947A1 (en) * | 2008-11-05 | 2011-06-30 | Toyota Jidosha Kabushiki Kaisha | Control device of a hybrid vehicle |
| JPWO2010058470A1 (ja) * | 2008-11-20 | 2012-04-12 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| KR101020953B1 (ko) * | 2009-01-29 | 2011-03-09 | 현대자동차주식회사 | 하이브리드 차량의 변속제어방법 |
| US8406946B2 (en) * | 2010-03-25 | 2013-03-26 | Tai-Her Yang | Single-powered multi-CVT differential system with stabilizing device |
| TWI444550B (zh) * | 2010-06-08 | 2014-07-11 | Ind Tech Res Inst | 複合動力系統無段變速器之液壓控制裝置之控制方法與系統 |
| US8444516B2 (en) * | 2010-09-15 | 2013-05-21 | Chrysler Group Llc | Multi-speed drive unit |
| JP5589785B2 (ja) * | 2010-11-12 | 2014-09-17 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| KR101609086B1 (ko) * | 2011-11-01 | 2016-04-04 | 쟈트코 가부시키가이샤 | 전동 차량의 모터 제어 장치 |
| KR101371461B1 (ko) * | 2012-09-06 | 2014-03-10 | 기아자동차주식회사 | 하이브리드 차량의 엔진클러치의 토크전달 시작점 학습 제어 방법 및 시스템 |
| WO2014054724A1 (ja) * | 2012-10-04 | 2014-04-10 | 日産自動車株式会社 | ハイブリッド車両の始動制御装置 |
| JP2014184804A (ja) * | 2013-03-22 | 2014-10-02 | Toyota Motor Corp | 車両用動力伝達装置の制御装置 |
| KR101635302B1 (ko) * | 2013-04-16 | 2016-06-30 | 도요타지도샤가부시키가이샤 | 차량용 변속기의 제어 장치 |
| JP2015174490A (ja) * | 2014-03-13 | 2015-10-05 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6295149B2 (ja) * | 2014-06-30 | 2018-03-14 | ダイハツ工業株式会社 | 車両用変速装置 |
| JP6264273B2 (ja) * | 2014-12-10 | 2018-01-24 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| EP3132966A1 (de) * | 2015-08-21 | 2017-02-22 | Magna Steyr Fahrzeugtechnik AG & Co KG | Verfahren zum betreiben eines fahrzeuges |
| KR101714521B1 (ko) * | 2015-11-06 | 2017-03-22 | 현대자동차주식회사 | 하이브리드 자동차 및 그를 위한 효율적인 변속 제어 방법 |
| US9783188B2 (en) | 2016-01-13 | 2017-10-10 | Ford Global Technologies, Llc | EV mode shift strategy for hybrid vehicle |
| US10000203B2 (en) * | 2016-01-13 | 2018-06-19 | Ford Global Technologies, Llc | EV mode shift strategy for hybrid vehicle |
| JP6544345B2 (ja) * | 2016-11-29 | 2019-07-17 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6778830B2 (ja) * | 2017-10-12 | 2020-11-04 | 三菱自動車工業株式会社 | 変速機の制御装置 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5030223A (ja) * | 1973-07-20 | 1975-03-26 | ||
| JP2748511B2 (ja) * | 1989-03-08 | 1998-05-06 | 日産自動車株式会社 | 変速機の制御装置 |
| JPH05164205A (ja) | 1991-12-16 | 1993-06-29 | Hino Motors Ltd | 無段変速装置 |
| JP3291916B2 (ja) | 1994-06-06 | 2002-06-17 | 株式会社エクォス・リサーチ | ハイブリッド型車両 |
| JP3409523B2 (ja) * | 1995-08-02 | 2003-05-26 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置の制御装置 |
| JP3454036B2 (ja) * | 1995-11-13 | 2003-10-06 | トヨタ自動車株式会社 | ハイブリッド駆動装置 |
| JP3514017B2 (ja) | 1995-12-06 | 2004-03-31 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置の制御装置 |
| JP3214368B2 (ja) * | 1996-08-13 | 2001-10-02 | トヨタ自動車株式会社 | 動力出力装置 |
| US5730676A (en) * | 1996-10-22 | 1998-03-24 | General Motors Corporation | Three-mode, input-split hybrid transmission |
| JPH10243502A (ja) * | 1997-02-26 | 1998-09-11 | Aisin Aw Co Ltd | 車両用駆動装置の制御装置 |
| JP3646964B2 (ja) | 1998-01-16 | 2005-05-11 | 富士重工業株式会社 | ハイブリッド車 |
| JP3646966B2 (ja) | 1998-02-03 | 2005-05-11 | 富士重工業株式会社 | ハイブリッド車 |
| JP3646962B2 (ja) | 1998-01-12 | 2005-05-11 | 富士重工業株式会社 | ハイブリッド車 |
| JP3402236B2 (ja) * | 1999-01-13 | 2003-05-06 | トヨタ自動車株式会社 | 動力出力装置およびハイブリッド車両並びにその制御方法 |
| JP4147687B2 (ja) | 1999-05-24 | 2008-09-10 | 株式会社エクォス・リサーチ | ハイブリッド型車両及びその制御方法 |
| JP4370637B2 (ja) * | 1999-06-04 | 2009-11-25 | トヨタ自動車株式会社 | ハイブリッド車両およびその制御方法 |
| US6579201B2 (en) * | 2000-08-22 | 2003-06-17 | New Venture Gear, Inc. | Electric hybrid four-wheel drive vehicle |
| US6527658B2 (en) * | 2001-04-02 | 2003-03-04 | General Motors Corporation | Electrically variable transmission with selective input split, compound split, neutral and reverse modes |
| KR100408409B1 (ko) | 2001-05-28 | 2003-12-06 | 삼성전자주식회사 | 시스템의 공진 주파수 제거 장치 및 방법 |
| DE10140424A1 (de) | 2001-08-17 | 2003-02-27 | Zahnradfabrik Friedrichshafen | Automatisch schaltbares Fahrzeuggetriebe |
| US7223200B2 (en) * | 2001-10-22 | 2007-05-29 | Toyota Jidosha Kabushiki Kaisha | Hybrid-vehicle drive system and operation method with a transmission |
| JP3893938B2 (ja) | 2001-10-22 | 2007-03-14 | トヨタ自動車株式会社 | 変速機を備えたハイブリッド車駆動構造 |
| JP3852321B2 (ja) * | 2001-10-22 | 2006-11-29 | トヨタ自動車株式会社 | クランキング支持トルク増大手段付きhv駆動構造および方法 |
| JP3852322B2 (ja) | 2001-10-22 | 2006-11-29 | トヨタ自動車株式会社 | 変速機付きハイブリッド車駆動構造の運転方法 |
| JP3757845B2 (ja) | 2001-10-22 | 2006-03-22 | トヨタ自動車株式会社 | 変速機付きハイブリッド車駆動構造の運転方法 |
| JP3585121B2 (ja) * | 2002-02-20 | 2004-11-04 | トヨタ自動車株式会社 | 動力出力装置およびこれを備える自動車 |
| JP2004236406A (ja) | 2003-01-29 | 2004-08-19 | Toyota Motor Corp | 動力出力装置およびこれを備える自動車 |
| JP3963868B2 (ja) * | 2003-06-23 | 2007-08-22 | トヨタ自動車株式会社 | ハイブリッド駆動装置の制御装置 |
-
2004
- 2004-11-26 JP JP2004342882A patent/JP4306597B2/ja active Active
-
2005
- 2005-02-23 WO PCT/JP2005/003425 patent/WO2005080112A1/ja active Application Filing
- 2005-02-23 EP EP05719740A patent/EP1728665B1/en not_active Expired - Fee Related
- 2005-02-23 DE DE602005014947T patent/DE602005014947D1/de active Active
- 2005-02-23 KR KR1020067019792A patent/KR100851265B1/ko active IP Right Grant
- 2005-02-23 US US11/062,880 patent/US7252619B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR20060126616A (ko) | 2006-12-07 |
| US20050245350A1 (en) | 2005-11-03 |
| JP2005278387A (ja) | 2005-10-06 |
| EP1728665A4 (en) | 2008-04-09 |
| DE602005014947D1 (de) | 2009-07-30 |
| EP1728665A1 (en) | 2006-12-06 |
| EP1728665B1 (en) | 2009-06-17 |
| KR100851265B1 (ko) | 2008-08-08 |
| WO2005080112A1 (ja) | 2005-09-01 |
| US7252619B2 (en) | 2007-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4306597B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4155230B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4165526B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4244961B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4192911B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4438689B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4277806B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4434079B2 (ja) | 車両用駆動装置の制御装置 | |
| JP2009012532A (ja) | ハイブリッド車両用駆動装置の制御装置 | |
| JP2007001390A (ja) | 車両用駆動装置の制御装置 | |
| JP2007001389A (ja) | 車両用駆動装置の制御装置 | |
| JP2006298066A (ja) | 車両用駆動装置 | |
| JP4192916B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4134954B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4215027B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4228942B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4389806B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4168954B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4069903B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4274150B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4442398B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4225253B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4182917B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4225247B2 (ja) | 車両用駆動装置の制御装置 | |
| JP4192855B2 (ja) | 車両用駆動装置の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071106 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080325 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080617 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080811 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080916 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090325 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090414 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090427 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4306597 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120515 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120515 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130515 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130515 Year of fee payment: 4 |