CAMPO DA TÉCNICA
[001] A presente invenção refere-se a um controle de carrega mento para um veículo, e especificamente, a um controle de carregamento para um veículo que inclui um sistema de carregamento que carrega um dispositivo de armazenamento de carga para acionar o veículo com energia elétrica suprida de uma fonte de alimentação externa ao veículo.
ANTECEDENTES DA TÉCNICA
[002] Em anos recentes, um veículo elétrico, um veículo híbrido, um veículo de célula de combustível e similares têm recebido atenção como um veículo ambientalmente amigável. Nestes veículos, um motor que gera uma força de acionamento para se deslocar assim como um dispositivo de armazenamento de energia que armazena a energia elétrica suprida para o motor estão montados. O veículo híbrido ainda tem um motor de combustão interna montado no mesmo como uma fonte de energia, juntamente com o motor. O veículo de célula de combustível tem uma célula de combustível montada no mesmo como uma fonte de alimentação de corrente contínua (CC) para acionar o veículo. Entre estes veículos, um veículo é conhecido no qual um dispositivo de armazenamento de energia montado em veículo para acio-nar o veículo pode ser carregado de uma fonte de alimentação de residências comuns. Por exemplo, uma tomada de alimentação provida em uma residência é conectada a uma porta de carregamento provida no veículo pela utilização de um cabo de carregamento, de modo que a energia elétrica seja suprida da fonte de alimentação nas residências comuns para o dispositivo de armazenamento de energia. É notado que o veículo no qual o dispositivo de armazenamento de energia montado em veículo pode ser carregado da fonte de alimentação ex- terna ao veículo como acima descrito será também referido como "veículo de plugar" daqui em diante. Por exemplo, a Patente Japonesa Aberta à Inspeção Pública Número 2000-270484 (Documento de Patente 1) descreve uma técnica para detectar uma anormalidade tal como uma interrupção ou uma falha de energia em uma fonte de alimentação comercial após o carregamento começar na fonte de alimentação de plugar acima.
[003] Um aparelho de detecção de anormalidade descrito na Pa tente Japonesa Aberta à Inspeção Pública Número 2000-270484 inclui: um motor; uma bateria; uma unidade de conversão conectada entre o motor e a bateria, para converter uma corrente alternada da fonte de alimentação comercial para uma corrente contínua através do motor de acordo com um sinal de comutação e suprir a corrente contínua para a bateria; uma unidade de detecção de fase de voltagem conectada entre o motor e a fonte de alimentação comercial, para determinar o liga/desliga de cruzamento zero de uma fonte de alimentação comercial e detectar uma fase de voltagem da voltagem de fonte de alimentação comercial; uma primeira unidade de detecção de corrente para detectar a corrente alternada que flui através de uma bobina do motor; uma segunda unidade de detecção de corrente para detectar a corrente contínua suprida da unidade de conversão para a bateria; uma unidade de geração de valor de comando para gerar um valor de comando de corrente alternada com base em um valor de comando para carregar, o resultado da detecção pela segunda unidade de detecção de corrente, e a voltagem de fase; uma unidade de geração de sinal de comutação para gerar um sinal de comutação com base no valor de comando de corrente alternada e no resultado da detecção pela primeira unidade de detecção de corrente; e uma unidade de detecção de anormalidade para detectar uma anormalidade com base no valor de comando de corrente alternada e no resultado da detecção pela primeira unidade de detecção de corrente.
[004] De acordo com o aparelho de detecção de anormalidade descrito na Patente Japonesa Aberta à Inspeção Pública Número 2000-270484, a corrente alternada da fonte de alimentação comercial é convertida na corrente contínua através do motor de acordo com o sinal de comutação, e a corrente contínua é suprida para a bateria. Assim, o liga/desliga de cruzamento zero da voltagem de fonte de alimentação comercial da fonte de alimentação comercial é determinado, a fase de voltagem da voltagem de fonte de alimentação comercial é detectada, e a corrente alternada que flui através da bobina do motor assim como a corrente contínua suprida para a bateria são detectadas. Além disso, o valor de comando de corrente contínua é gerado com base no valor de comando para carregar, no resultado da detecção da corrente contínua, e na fase de voltagem. O sinal de comutação é gerado com base no valor de comando de corrente contínua e no resultado da detecção da corrente alternada. Mais ainda, a anormalidade é detectada com base no valor de comando de corrente alternada e no resultado da detecção da corrente alternada. Consequentemente, a anormalidade que ocorre em um aparelho de controle de carregamento após o carregamento começar pode ser detectada. Além disso, como não é requerido colocar um novo sensor especial para detectar a anormalidade, o custo do aparelho de detecção de anormalidade pode ser reduzido.
[005] O documento DE3528659 A1 mostra que em uma instala ção de carga de bateria com pelo menos um comutador de carga e um cabo de carga, a partir do qual dois cabos são conectados aos polos da bateria e que podem ser conectados a uma fonte de tensão de carga, um sensor de identificação da bateria é disposto, conectado à bateria, como um transmissor de um sinal específico da bateria, e pelo menos um receptor para avaliar o sinal é disposto no comutador de carga. A conexão entre o sensor de identificação da bateria e o receptor é formada pelo cabo de carga. Neste caso, uma parte da chave de carga tem um conjunto de circuito como receptor/transmissor que é conectado através de uma conexão funcional à chave de carga. O transmissor do conjunto do circuito pode ser ativado em função da conexão da bateria. O sinal do transmissor aciona um sinal específico da bateria por meio do sensor de identificação da bateria, de modo que uma memória de uma linha de memória é então acionada na chave de carga.
[006] O documento GB 2 182 792 A finalmente mostra que em um sistema de reconhecimento de baterias conectado a um carregador, o carregador transmite uma banda de sinal que consiste em um sinal que varia periodicamente para iniciar a geração de um sinal de retorno indicador de bateria em uma bateria conectada ao carregador. O sinal de retorno vem de circuitos ressonantes comutados seletivamente, que respondem quando a bateria é endereçada por um sinal de frequência variável de um oscilador controlado por voltagem acionado por um gerador de dente de serra. A operação pode ser iniciada através da conexão do cabo de carga.
DESCRIÇÃO DA INVENÇÃO
PROBLEMAS A SEREM RESOLVIDOS PELA INVENÇÃO
[007] Um oscilador para gerar um sinal piloto que tem uma largu ra de pulso com base na magnitude de uma corrente nominal e similares que pode ser suprida de uma fonte de alimentação para um veículo está provido dentro de um cabo de carregamento em alguns casos. Este sinal piloto é utilizado para determinar se o carregamento é ou não possível no lado do veículo, e é desejado utilizar este sinal piloto não somente para a determinação quanto a se é possível ou não carregar mas também para a ativação de um sistema de carregamento no lado do veículo, a detecção de uma interrupção dentro do sistema de carregamento, e similares. Apesar da Patente Japonesa Aberta à Inspeção Pública Número 2000-270484 descrever uma técnica de detectar a anormalidade no aparelho de controle de carregamento com base no valor de comando e no resultado da detecção da corrente alternada da fonte de alimentação comercial, esta não descreve uma técnica de detectar a anormalidade e controlar o carregamento pela utilização do sinal piloto gerado no oscilador dentro do cabo de carregamento.
[008] A presente invenção foi feita para resolver os problemas acima descritos, e um objetivo do mesmo é de prover um aparelho de controle de carregamento que possa utilizar um sinal piloto de um osci- lador dentro de um cabo de carregamento como um sinal de ativação para um sistema de carregamento de um veículo.
MEIOS PARA RESOLVER OS PROBLEMAS
[009] Um aparelho de controle de carregamento de acordo com a presente invenção controla um veículo que inclui um sistema de carregamento para carregar um dispositivo de armazenamento de energia com energia elétrica suprida de uma fonte de alimentação externa ao veículo através de um cabo de carregamento. O veículo recebe um sinal piloto de um oscilador provido dentro do cabo de carregamento quando o cabo de carregamento conecta a fonte de alimentação e o veículo. O oscilador faz com que o sinal piloto oscile em uma largura de pulso com base na magnitude de uma corrente nominal que pode ser suprida para o veículo, em resposta a uma mudança em um potencial do sinal piloto de um potencial inicial para um potencial de osci-lação. O aparelho de controle de carregamento inclui: uma linha piloto de controle na qual o sinal piloto é inserida; um elemento de resistência conectado entre a linha piloto de controle e um terra de veículo (vehicle earth), para mudar o potencial do sinal piloto do potencial inicial para o potencial de oscilação; uma unidade de comutação conectada ou entre a linha piloto de controle e o elemento de resistência ou entre o elemento de resistência e o terra de veículo, e comutada para qualquer um de um estado separado onde o elemento de resistência está separado de qualquer um da linha piloto de controle e o terra de veículo, e um estado conectado onde o elemento de resistência está conectado na linha piloto de controle e no terra de veículo; e uma unidade de controle para começar a ativação do sistema de carregamento com base no potencial da linha piloto de controle. A unidade de controle controla a unidade de comutação para o estado separado pelo menos quando conectando o cabo de carregamento e o veículo.
[0010] De acordo com a presente invenção, o elemento de resis tência para mudar o potencial do sinal piloto do potencial inicial para o potencial de oscilação está conectado entre o terra de veículo e a linha piloto de controle à qual o sinal piloto (sinal piloto CPLT) do oscilador provido no cabo de carregamento é inserido. A unidade de comutação é controlada pela unidade de controle, e por meio disto, o elemento de resistência está separado de qualquer um da linha piloto de controle e do terra de veículo pelo menos quando conectando o cabo de carregamento e o veículo. Como um resultado, como o potencial do sinal piloto não muda para o potencial de oscilação pelo menos quando conectando o cabo de carregamento e o veículo, o sinal piloto não oscila e o seu potencial fica retido no potencial inicial. Portanto, pode ser prontamente determinado que o potencial da linha piloto de controle mudou para o potencial inicial, sem utilizar um conversor de F/V (Frequência Para Voltagem) complicado, e a ativação do sistema de carregamento pode começar com base no resultado da determinação. Em outras palavras, o sinal piloto do oscilador pode ser utilizado como um sinal de ativação para o sistema de carregamento do veículo. Consequentemente pode ser provido um aparelho de controle de carregamento que pode utilizar o sinal piloto do oscilador dentro do cabo de carregamento como o sinal de ativação para o sistema de carrega- mento do veículo.
[0011] De preferência, a unidade de controle controla a unidade de comutação para o estado separado quando conectando o cabo de car-regamento e o veículo, e controla a unidade de comutação para o estado conectado quando completando a ativação do sistema de carregamento.
[0012] De acordo com a presente invenção, o elemento de resis tência está separado de qualquer um da linha piloto de controle e do terra de veículo quando conectando o cabo de carregamento e o veículo. Portanto, o sinal piloto do oscilador pode ser utilizado como o sinal de ativação para o sistema de carregamento. Mais ainda, o elemento de resistência está conectado na linha piloto de controle e no terra de veículo quando completando a ativação do sistema de carregamento. Como um resultado, o potencial do sinal piloto muda para o potencial de oscilação, e portanto, o sinal piloto oscila na largura de pulso com base na magnitude da corrente nominal que pode ser suprida para o veículo. Portanto, a corrente nominal que pode ser suprida para o veículo pode ser detectada pela detecção da largura de pulso do sinal piloto.
[0013] Preferencialmente, a unidade de controle ainda determina se o cabo de carregamento está ou não conectado no veículo, com base na presença ou na ausência do sinal piloto.
[0014] De acordo com a presente invenção, é determinado se o cabo de carregamento está ou não conectado no veículo, com base na presença ou na ausência do sinal piloto. Portanto, mesmo quando não existe nenhum sinal de conexão entre o cabo de carregamento e o veículo ou mesmo quando o sinal de conexão entre o cabo de carregamento e o veículo for anormal, por exemplo, pode ser apropriadamente determinado se o cabo de carregamento está ou não conectado no veículo.
[0015] Preferencialmente, o veículo recebe um sinal de conexão cuja saída muda de acordo com o estado de conexão entre o cabo de carregamento e o veículo. A unidade de controle ainda detecta uma anormalidade no sinal de conexão com base em um resultado de comparação entre o sinal de conexão e o sinal piloto.
[0016] De acordo com a presente invenção, quando uma saída do sinal de conexão indica que o cabo de carregamento não esta conectado no veículo apesar do cabo de carregamento estar conectado no veículo e o sinal piloto do oscilador está retido no potencial inicial, por exemplo, a anormalidade no sinal de conexão pode ser detectada. Portanto, o sinal piloto do oscilador pode ser prontamente utilizado para a detecção da anormalidade no sinal de conexão.
[0017] Preferencialmente, o veículo recebe um sinal de conexão cuja saída muda de acordo com o estado de conexão entre o cabo de carregamento e o veículo. A unidade de controle ainda detecta pelo menos qualquer um de uma parada de alimentação de energia elétrica para a fonte de alimentação e o reinício de alimentação de energia elétrica para a fonte de alimentação, com base no potencial da linha piloto de controle, quando é determinado que o cabo de carregamento está conectado no veículo, com base no sinal de conexão.
[0018] De acordo com a presente invenção, quando a saída do sinal de conexão indica que o cabo de carregamento está conectado no veículo e quando o potencial da linha piloto de controle é o potencial quando o sinal piloto do oscilador não é inserido, por exemplo, pode ser determinado que a alimentação de energia elétrica para a fonte de alimentação para. Mais ainda, quando o potencial da linha piloto de controle mudou do potencial quando o sinal piloto do oscilador não é inserido no potencial inicial, pode ser determinado que uma recuperação de uma falha de energia foi conseguida.
[0019] Preferencialmente, o sinal piloto é inserido na linha piloto de controle quando um tempo de carregamento reservado ajustado em um temporizador para reservar o carregamento de veículo chega, enquanto o cabo de carregamento está conectado no veículo e conectado na fonte de alimentação com o temporizador interposto.
[0020] De acordo com a presente invenção, o sinal piloto é inseri do na linha piloto de controle quando o tempo de carregamento reservado ajustado no temporizador chega. Portanto, quando o tempo de carregamento reservado chega, o potencial da linha piloto de controle muda do potencial quando o sinal piloto não é inserido no potencial inicial, e está retido no potencial inicial. Portanto, pode ser prontamente determinado que o potencial da linha piloto de controle mudou para o potencial inicial, e a ativação do sistema de carregamento pode começar com base no resultado da determinação. De acordo com tal configuração, simplesmente conectando o temporizador de carregamento comercialmente disponível e econômico entre o cabo de carregamento e a fonte de alimentação, sem prover a função de temporizador no lado do veículo, permite carregar a um tempo de início de carregamento (por exemplo, as horas noturnas quando a taxa de energia elétrica é econômica) pré-selecionado pelo usuário.
BREVE DESCRIÇÃO DOS DESENHOS
[0021] Figura 1 é um diagrama de blocos geral de um veículo hí brido de plugar mostrado como um exemplo de um veículo sobre o qual um aparelho de controle de carregamento de acordo com uma primeira modalidade da presente invenção está montado.
[0022] Figura 2 ilustra um gráfico colinear de um dispositivo de di visão de energia de acordo com a primeira modalidade da presente invenção.
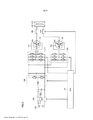
[0023] Figura 3 é um diagrama de configuração geral de um sis tema elétrico no veículo híbrido de plugar de acordo com a primeira modalidade da presente invenção.
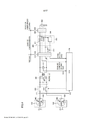
[0024] Figura 4 é um diagrama de configuração esquemático de uma porção relativa a um sistema de carregamento do sistema elétrico de acordo com a primeira modalidade da presente invenção.
[0025] Figura 5 ilustra uma forma de onda de um sinal piloto gera do por um controlador EVSE de acordo com a primeira modalidade da presente invenção.
[0026] Figura 6 é um diagrama para descrever o sistema de carre gamento de acordo com a primeira modalidade da presente invenção.
[0027] Figura 7 é um diagrama de blocos funcional do aparelho de controle de carregamento de acordo com a primeira modalidade da presente invenção.
[0028] Figura 8 é um fluxograma que ilustra uma estrutura de con trole de uma CPU que configura o aparelho de controle de carregamento de acordo com a primeira modalidade da presente invenção.
[0029] Figura 9 é um gráfico de tempo (No 1) de um sinal piloto CPLT.
[0030] Figura 10 é um gráfico de tempo (No 2) do sinal piloto CPLT.
[0031] Figura 11 é um diagrama para descrever um sistema de carregamento de acordo com uma modificação da primeira modalidade da presente invenção.
[0032] Figura 12 é um gráfico de tempo (No 1) do sinal piloto CPLT e um sinal de conexão de cabo PISW.
[0033] Figura 13 é uma tabela de comparação do sinal piloto CPLT e do sinal de conexão de cabo PISW.
[0034] Figura 14 é um fluxograma que ilustra uma estrutura de con trole de uma CPU que configura um aparelho de controle de carregamento de acordo com uma segunda modalidade da presente invenção.
[0035] Figura 15 é um gráfico de tempo (No 2) do sinal piloto CPLT e do sinal de conexão de cabo PISW.
[0036] Figura 16 é um fluxograma que ilustra uma estrutura de controle de uma CPU que configura um aparelho de controle de carregamento de acordo com uma terceira modalidade da presente invenção.
[0037] Figura 17 é um gráfico de tempo (No 3) do sinal piloto CPLT e do sinal de conexão de cabo PISW.
DESCRIÇÃO DOS SINAIS DE REFERÊNCIA
[0038] 100 motor; 110 primeiro MG; 112, 122 ponto neutro; 120 segundo MG; 130 dispositivo de divisão de energia; 140 engrenagem de redução; 150 dispositivo de armazenamento de energia; 160 roda de tração; 170 ECU; 171 sensor de voltagem; 172 sensor de corrente; 200 conversor; 210 primeiro inversor; 220 segundo inversor; 250 SMR; 260 DFR; 270 entrada de carregamento; 280 filtro de LC; 300 cabo de carregamento; 310 conector; 312 comutador de limite; 320 plugue; 330 CCID; 332 relé; 334 controlador de EVSE; 400 saída de fonte de alimentação; 402 fonte de alimentação; 406 temporizador de carregamento; 502 circuito de resistência; 508, 510 armazenamento temporário de entrada; 512, 514, 520 CPU; 516 fonte de alimentação; 518 terra de veículo; 522 unidade de detecção de VL(1); 524 unidade de controle de carregamento; 602 oscilador; 604 sensor de voltagem; 606 bobina eletromagnética; 608 detector de fuga; R(1) elemento de resistên-cia; R(2), R(3) elemento de resistência de redução; SW(1), SW(2) comutador; L(1) linha piloto de controle; L(2) linha de sinal.
MELHORES MODOS PARA EXECUTAR A INVENÇÃO
[0039] As modalidades da presente invenção serão daqui em dian te descritas com referência aos desenhos. Na descrição seguinte, os mesmos componentes estão denotados com os mesmos caracteres de referência. Os seus nomes e funções também são os mesmos. Consequentemente, uma descrição detalhada sobre estes não será repetida.
PRIMEIRA MODALIDADE
[0040] Um veículo de plugar que inclui um aparelho de controle de carregamento de acordo com a presente modalidade será descrito com referência às figuras 1 e 2. É notado que o veículo ao qual o aparelho de controle de carregamento de acordo com a presente modalidade está aplicado não está limitado a um veículo híbrido, mas pode ser um veículo elétrico.
[0041] Este veículo híbrido de plugar inclui um motor 100, um pri meiro MG (Motor Gerador) 110, um segundo MG 120, uma engrenagem de redução 140, um dispositivo de armazenamento de energia 150, uma roda de tração 160 e uma ECU 170.
[0042] O motor 100, o primeiro MG (Motor Gerador) 110 e o se gundo MG 120 estão acoplados no dispositivo de divisão de energia 130. O veículo híbrido de plugar se desloca utilizando a força de acionamento de pelo menos um do motor 100 e do segundo MG 120. A potência motora gerada pelo motor 100 é dividida pelo dispositivo de divisão de energia 130 em dois percursos, isto é, um percurso através do qual a potência motora é transmitida para a roda de tração 160 através da engrenagem de redução 140, e o outro através do qual a potência motora é transmitida para o primeiro MG 110.
[0043] O primeiro MG 110 é uma máquina elétrica rotativa de cor rente alternada (CA), e é um motor síncrono CA trifásico que inclui uma bobina de fase U, uma bobina de fase V e uma bobina de fase W, por exemplo. O primeiro MG 110 gera a energia elétrica pela utilização da potência motora do motor 100 dividida pelo dispositivo de divisão de energia 130. Por exemplo, quando um estado de carga (que será também referido como "SOC (Estado de Carga)" daqui em diante) do dispositivo de armazenamento de energia 150 cai abaixo de um valor predeterminado, o motor 100 liga e uma energia elétrica é gerada pelo primeiro MG 110. A energia elétrica gerada pelo primeiro MG 110 é convertida de CA para CC por um inversor (que será daqui em diante descrito), a sua voltagem é ajustada por um conversor (que será daqui em diante descrito), e então a energia elétrica é armazenada no dispositivo de armazenado de energia 150.
[0044] O segundo MG 120 é uma máquina elétrica rotativa CA, e é um motor síncrono CA trifásico que inclui uma bobina de fase U, uma bobina de fase V e uma bobina de fase W, por exemplo. O segundo MG 120 gera uma força de acionamento pela utilização de pelo menos uma da energia elétrica armazenada no dispositivo de armazenamento de energia 150 e da energia elétrica gerada pelo primeiro MG 110. A força de acionamento do segundo MG 120 é transmitida para a roda de tração 160 através da engrenagem de redução 140. Como um resultado, o segundo MG 120 auxilia o motor 100 ou faz com que o veículo se desloque pela utilização da força de acionamento do segundo MG 120. Apesar da roda de tração 160 ser mostrada como uma roda dianteira na figura 1, uma roda traseira pode ser acionada pelo segundo MG 120, ao invés da roda dianteira ou juntamente com a roda dianteira.
[0045] É notado que, no momento de frenagem e similares do veí culo, o segundo MG 120 é acionado pela roda de tração 160 através da engrenagem de redução 140, e o segundo MG 120 é operado como um gerador. Como um resultado, o segundo MG 120 é operado como um freio regenerativo para converter a energia de frenagem em energia elétrica. A energia elétrica gerada pelo segundo MG 120 é armazenada no dispositivo de armazenamento de energia 150.
[0046] O dispositivo de divisão de energia 130 está formado de uma engrenagem planetária que inclui uma engrenagem solar, uma engrenagem pinhão, um mancal, e uma engrenagem de anel. A engrenagem pinhão acopla a engrenagem solar e a engrenagem de anel. O mancal rotativo suporta a engrenagem pinhão, e além disso, está acoplado no eixo de manivelas do motor 100. A engrenagem solar está acoplada a um eixo de rotação do primeiro MG 110. A engrenagem de anel está acoplada a um eixo de rotação do segundo MG 120 e na engrenagem de redução 140.
[0047] O motor 100, o primeiro MG 110 e o segundo MG 120 es tão acoplados com o dispositivo de divisão de energia 130 formado da engrenagem planetária sendo interposto entre estes, de modo que a relação entre as velocidades de rotação do motor 100, do primeiro MG 110 e do segundo MG 120 é tal que estes estão conectados por uma linha reta em um gráfico colinear como mostrado na figura 2.
[0048] O dispositivo de armazenamento de energia 150 é uma fon te de alimentação CC recarregável, e está formado de uma segunda bateria tal como de hidreto metálico de níquel e íons de lítio, por exemplo. A voltagem do dispositivo de armazenamento de energia 150 é de, por exemplo, aproximadamente 200 V. Além da energia elétrica gerada pelo primeiro MG 110 e pelo segundo MG 120, a energia elétrica suprida de uma fonte de alimentação externa ao veículo é armazenada no dispositivo de armazenamento de energia 150, como será daqui em diante descrito. É notado que um capacitor de grande capa- citância pode também ser empregado como o dispositivo de armazenamento de energia 150, e qualquer acumulador temporário de energia elétrica pode ser empregado se este puder armazenar temporariamente a energia elétrica gerada pelo primeiro MG 110 e pelo segun-do MG 120 assim como a energia elétrica da fonte de alimentação externa ao veículo e suprir a energia elétrica armazenada para o segundo MG 120.
[0049] O motor 100, o primeiro MG 110 e o segundo MG 120 são controlados pela ECU 170. É notado que a ECU 170 pode ser dividida em uma pluralidade de ECUs para cada função. É notado que uma configuração da ECU 170 será daqui em diante descrita.
[0050] Um sistema elétrico do veículo híbrido de plugar de acordo com a presente modalidade será descrito com referência à figura 3. Este sistema elétrico inclui um dispositivo de armazenamento de energia 150, um SMR (Relé Principal de Sistema) 250, um conversor 200, um primeiro inversor 210, um segundo inversor 220, um primeiro MG 110, um segundo MG 120, um DFR (Dead Front Relay - Relé Frontal Inativo) 260, um filtro de LC 280, uma entrada de carregamento 270, e uma ECU 170.
[0051] O SMR 250 está provido entre o dispositivo de armazena mento de energia 150 e o conversor 200. O SMR 250 é um relé para conectar/desconectar eletricamente o dispositivo de armazenamento de energia 150 e o sistema elétrico, e o liga/desliga do SMR 250 é controlado pela ECU 170. Em outras palavras, quando o veículo se desloca e quando o dispositivo de armazenamento de energia 150 é carregado da fonte de alimentação externa ao veículo, o SMR 250 é ligado, e o dispositivo de armazenamento de energia 150 é eletricamente conectado no sistema elétrico. Por outro lado, quando o sistema de veículo para, o SMR 250 é desligado, e o dispositivo de armazenamento de energia 150 é eletricamente desconectado do sistema elétrico.
[0052] O conversor 200 inclui um reator, dois transistores tipo npn e dois diodos. O reator tem uma extremidade conectada no lado de eletrodo positivo do dispositivo de armazenamento de energia 150, e a outra extremidade conectada a um nodo de conexão dos dois transistores tipo npn. Os dois transistores tipo npn estão conectados em série e cada transistor tipo npn tem um diodo conectado em antiparalelo.
[0053] É notado que um IGBT (Transistor Bipolar de Porta Isola da), por exemplo, pode ser utilizado como o transistor tipo npn. Mais ainda, um elemento de comutação de energia tal como um MOSFET (Transistor de Efeito de Campo Semicondutor de Óxido Metálico) de energia pode ser utilizado ao invés do transistor tipo npn.
[0054] Quando a energia elétrica é suprida do dispositivo de arma zenamento de energia 150 para o primeiro MG 110 ou o segundo MG 120, o conversor 200 intensifica a energia elétrica descarregada do dispositivo de armazenamento de energia 150 e supre a energia elétrica para o primeiro MG 110 ou o segundo MG 120, com base em um sinal de controle da ECU 170. Mais ainda, quando o dispositivo de armazenamento de energia 150 está carregado, o conversor 200 diminui a energia elétrica suprida do primeiro MG 110 ou do segundo MG 120 e emite a energia elétrica para o dispositivo de armazenamento de energia 150.
[0055] O primeiro inversor 210 inclui um braço de fase U, um bra ço de fase V e um braço de fase W. O braço de fase U, o braço de fase V e o braço de fase W estão conectados em paralelo. Cada fase inclui dois transistores tipo npn conectados em série, e cada transistor tipo npn tem um diodo conectado antiparalelo. Um ponto de conexão entre os dois transistores tipo npn em cada braço de fase está conectado a uma extremidade de uma bobina correspondente no primeiro MG 110 que é diferente de um ponto neutro 112.
[0056] O primeiro inversor 210 converte a energia elétrica CC su prida do conversor 200 para energia elétrica CA, e supre a energia elétrica CA convertida para o primeiro MG 110. Mais ainda, o primeiro in- versor 210 converte a energia elétrica CA gerada pelo primeiro MG 110 para energia elétrica CC, e supre a energia elétrica CC convertida para o conversor 200.
[0057] O segundo inversor 220 também tem uma configuração si milar àquela do primeiro inversor 210. Um ponto de conexão entre dois transistores tipo npn em cada braço de fase está conectado a uma ex-tremidade de uma bobina correspondente no segundo MG 120 que é diferente de um ponto neutro 122.
[0058] O segundo inversor 220 converte a energia elétrica CC su prida do conversor 200 para energia elétrica CA, e supre a energia elétrica CA convertida para o segundo MG 120. Mais ainda, o segundo inversor 220 converte a energia elétrica CA gerada pelo segundo MG 120 para energia elétrica CC, e supre a energia elétrica CC convertida para o conversor 200.Além disso, quando o dispositivo de armazenamento de energia 150 é carregado da fonte de alimentação externa ao veículo, o primeiro inversor 210 e o segundo inversor 220 convertem a energia elétrica CA provida da fonte de alimentação externa ao veículo para o ponto neutro 112 do primeiro MG 110 e o ponto neutro 122 do segundo MG 120, para energia elétrica CC, com base em um sinal de controle da ECU 170, e suprem a energia elétrica CC convertida para o conversor 200 pela utilização de um método que será daqui em diante descrito.
[0059] O DFR 260 está provido entre um par de linhas de energia conectadas aos pontos neutros 112, 122 e um par de linhas de energia conectadas no filtro de LC 280. O DFR 260 é um relé para conec- tar/desconectar eletricamente a entrada de carregamento 270 e o sistema elétrico, e o liga/desliga do DFR 260 é controlado pela ECU 170. Em outras palavras, quando o veículo se desloca, o DFR 260 é desligado, e a entrada de carregamento 270 é eletricamente separada do sistema elétrico. Por outro lado, quando o dispositivo de armazenamento de energia 150 é carregado da fonte de alimentação externa ao veículo, o DFR 260 é ligado, e a entrada de carregamento 270 é eletricamente conectada no sistema elétrico.
[0060] O filtro de LC 280 está provido entre o DFR 260 e a entrada de carregamento 270, e impede a emissão de um ruído de alta frequência do sistema elétrico do veículo híbrido de plugar para a fonte de alimentação externa ao veículo quando o dispositivo de armazenamento de energia 150 é carregado da fonte de alimentação externa ao veículo.
[0061] A entrada de carregamento 270 serve como uma interface de energia elétrica para receber a energia elétrica de carregamento da fonte de alimentação externa ao veículo. Quando o dispositivo de armazenamento de energia 150 é carregado da fonte de alimentação externa ao veículo, um conector de um cabo de carregamento através do qual a energia elétrica é suprida para o veículo da fonte de alimentação externa ao veículo é conectado na entrada de carregamento 270.
[0062] A ECU 170 gera os sinais de controle para acionar o SMR 250, o DFR 260, o conversor 200, o primeiro inversor 210, e o segundo inversor 220, e controla a operação de cada um destes dispositivos.
[0063] Uma porção relativa a um sistema de carregamento no sis tema elétrico de acordo com a presente modalidade será descrita com referência à figura 4. Um cabo de carregamento 300 para acoplar o veículo híbrido de plugar e a fonte de alimentação externa ao veículo inclui um conector 310, um plugue 320 e um CCID (Dispositivo Interruptor de Circuito de Carregamento) 330.
[0064] O conector 310 está configurado para ser capaz de ser co nectado na entrada de carregamento 270 provida no veículo. Um comutador de limite 312 está provido no conector 310. Quando o conector 310 está conectado na entrada de carregamento 270, o comutador de limite 312 é ativado, e um sinal de conexão de cabo PISW que indica que o conector 310 está conectado na entrada de carregamento 270 é inserido na ECU 170.
[0065] O plugue 320 está conectado a uma saída de fonte de ali mentação 400 em casa, por exemplo. A energia elétrica CA é suprida de uma fonte de alimentação 402 (por exemplo, uma fonte de alimentação de sistema) para a saída de fonte de alimentação 400.
[0066] O CCID 330 inclui um relé 332 e um controlador de EVSE (Equipamento de Suprimento de Veículo Elétrico) 334. O relé 332 está provido em um par de linhas de energia através das quais a energia elétrica de carregamento é suprida da fonte de alimentação 402 para o veículo híbrido de plugar. O liga/desliga do relé 332 é controlado pelo controlador de EVSE 334. Quando o relé 332 é desligado, um percurso de condução através do qual a energia elétrica é suprida da fonte de alimentação 402 para o veículo híbrido de plugar é desconectado. Por outro lado, quando o relé 332 é ligado, a energia elétrica pode ser suprida da fonte de alimentação 402 para o veículo híbrido de plugar.
[0067] Quando o plugue 320 está conectado na saída de fonte de alimentação 400, o controlador de EVSE 334 é operado pela energia elétrica suprida da fonte de alimentação 402. O controlador de EVSE 334 gera um sinal piloto CPLT para ser enviado para a ECU 170 do veículo através de uma linha piloto de controle. Quando o conector 310 está conectado na entrada de carregamento 210 e o potencial do sinal piloto CPLT é diminuído para um valor prescrito, o controlador de EVSE 334 faz com que o sinal piloto CPLT oscile em um ciclo ativo prescrito (uma razão de uma largura de pulso para um ciclo de oscilação).
[0068] Este ciclo ativo é determinado com base em uma corrente nominal que pode ser suprida da fonte de alimentação 402 através do cabo de carregamento 300 para o veículo.
[0069] Um sensor de voltagem 171 e um sensor de corrente 172 estão providos no lado do veículo. O sensor de voltagem 171 detecta uma voltagem VCA entre um par de linhas de energia providas entre a entrada de carregamento 270 e o filtro de LC 280, e emite o valor detectado para a ECU 170. O sensor de corrente 172 detecta uma corrente ICA que flui através de uma linha de energia entre o DFR 260 e o ponto neutro 112 do primeiro MG 110, e emite o valor detectado para a ECU 170. É notado que o sensor de corrente 172 pode estar provido em uma linha de energia entre o DFR 260 e o ponto neutro 122 do segundo MG 120.
[0070] O sinal piloto CPLT gerado pelo controlador de EVSE 334 será descrito com referência à figura 5. O sinal piloto CPLT oscila em um ciclo prescrito T. Aqui uma largura de pulso Ton do sinal piloto CPLT é determinada com base na corrente nominal que pode ser suprida da fonte de alimentação 402 através do cabo de carregamento 300 para o veículo. A notificação da corrente nominal é provida do controlador de EVSE 334 para a ECU 170 do veículo utilizando o sinal piloto CPLT, de acordo com o ciclo ativo indicado por uma razão de largura de pulso Ton do ciclo T.
[0071] É notado que a corrente nominal é definida para cada cabo de carregamento. Dependendo do tipo do cabo de carregamento, a corrente nominal varia, e portanto, o ciclo ativo do sinal piloto CPLT também varia. A ECU 170 do veículo recebe, através da linha piloto de controle, o sinal piloto CPLT enviado do controlador de EVSE 334 provido no cabo de carregamento 300, e detecta o ciclo ativo do sinal piloto CPLT recebido, de modo que a ECU 170 do veículo possa detectar a corrente nominal que pode ser suprida da fonte de alimentação 402 através do cabo de carregamento 300 para o veículo.
[0072] O controlador de EVSE 334 faz com que o relé 332 seja ligado quando a preparação para o carregamento está completa no lado do veículo.
[0073] A porção relativa ao sistema de carregamento no sistema elétrico de acordo com a presente modalidade será adicionalmente descrita com referência à figura 6.
[0074] O CCID 330 provido no cabo de carregamento 300 inclui uma bobina eletromagnética 606 e um detector de fuga 608, além do relé 332 e do controlador de EVSE 334. O controlador de EVSE 334 inclui um oscilador 602, um elemento de resistência R(1) e um sensor de voltagem 604.
[0075] O oscilador 602 é operado pela energia elétrica suprida da fonte de alimentação 402. O oscilador 602 emite um sinal não oscilante quando o potencial do sinal piloto CPLT detectado pelo sensor de voltagem 604 está ao redor de um potencial inicial prescrito V(1) (por exemplo, 12 V), e emite um sinal que oscila a uma frequência prescrita (por exemplo, 1 kHz) e ciclo ativo, quando o potencial do sinal piloto CPLT é diminuído para um potencial de oscilação prescrito V(2) (por exemplo, 9 V) que é mais baixo do que V(1).
[0076] Além disso, o controlador de EVSE 334 supre uma corrente para a bobina eletromagnética 606 quando o potencial do sinal piloto CPLT está ao redor de um potencial prescrito V(3) (por exemplo 6 V). Quando a corrente é suprida do controlador de EVSE 334, a bobina eletromagnética 606 gera uma força eletromagnética e o relé 332 é ligado. É notado que o potencial do sinal piloto CPLT é manipulado comutando um valor de resistência do circuito de resistência 502 da ECU 170 como será daqui em diante descrito.
[0077] O detector de fuga 608 está provido em um par de linhas de energia através das quais a energia elétrica de carregamento é suprida da fonte de alimentação 402 para o veículo híbrido de plugar, e detecta a presença ou a ausência de fuga. Especificamente, o detector de fuga 608 detecta o equilíbrio da corrente que flui através do par de linhas de energia na direção oposta, e detecta a ocorrência de fuga quando o equilíbrio é rompido. É notado que, apesar de não especificamente mostrado, quando a fuga é detectada pelo detector de fuga 608,a alimentação elétrica para a bobina eletromagnética 606 é interrompida e o relé 332 é desligado. Por outro lado, a ECU 170 provida no veículo híbrido de plugar inclui um circuito de resistência 502, armazenamentos temporários de entrada 508, 510, e uma CPU (Unidade de Processamento de Controle) 520. O circuito de resistência 502 inclui os elementos de resistência de redução R(2), R(3) e os comutadores SW(1), SW(2). A CPU 520 inclui uma CPU 512 e uma CPU 514.
[0078] O elemento de resistência de redução R(2) e o comutador SW(1) estão conectados em série entre um terra de veículo 518 e uma linha piloto de controle L(1) através da qual o sinal piloto CPLT é comunicado.
[0079] O elemento de resistência de redução R(3) e o comutador SW(2) estão conectados em série entre o terra de veículo 518 e uma linha piloto de controle L(1), e estão conectados em paralelo ao elemento de resistência de redução R(2) e ao comutador SW(1) conectados em série. É notado que, apesar de um exemplo ser mostrado na figura 6 no qual o comutador SW(2) está conectado entre o elemento de resistência de redução R(3) e o terra de veículo 518, o comutador SW(2) pode estar conectado entre a linha piloto de controle L(1) e o elemento de resistência de redução R(3).
[0080] O comutador SW(1) é ligado/desligado em resposta a um sinal de controle da CPU 512. Quando o comutador SW(1) é ligado, o elemento de resistência de redução R(2) é conectado no terra de veículo 518. Quando o comutador SW(1) é desligado, o elemento de resistência de redução R(2) é desconectado no terra de veículo 518. É notado que, no estado de não carregamento, o comutador SW(1) é posto na posição DESLIGA, e o elemento de resistência de redução R(2) e o terra de veículo 518 são ajustados para o estado desconecta- do. Em outras palavras, quando o cabo de carregamento 300 está conectado no veículo, o comutador SW(2) é posto na posição DESLIGA, e o elemento de resistência de redução R(3) é separado do terra de veículo 518.
[0081] Uma fonte de alimentação 516 cuja energia de entrada é controlada em reposta a um sinal de controle da CPU 514 está conec- tada no comutador SW(2). Quando a energia elétrica é suprida da fonte de alimentação 516 para o comutador SW(2) em reposta ao sinal de controle da CPU 514, o comutador SW(2) é ligado e o elemento de resistência de redução R(3) é conectado no terra de veículo 518. Quando a energia elétrica alimentada da fonte de alimentação 516 para o comutador SW(2) é interrompida em reposta ao sinal de controle da CPU 514, o comutador SW(2) é desligado e o elemento de resistência de redução R(3) é desconectado no terra de veículo 518. No estado de não carregamento, o comutador SW(2) é posto na posição DESLIGA, e o elemento de resistência de redução R(3) e o terra de veículo 518 são ajustados para o estado desconectado.
[0082] É notado que o comutador SW(2) pode ser configurado pa ra ser ligado/desligado em resposta ao sinal de controle da CPU 512 similarmente ao comutador SW(1). Se não for necessário distinguir para descrição entre o sinal de controle da CPU 512 e o sinal de controle da CPU 514, a descrição seguinte será provida conforme os comutadores SW(1) e SW(2) são ligados/desligados em resposta ao sinal de controle da CPU 520.
[0083] O circuito de resistência 502 comuta o potencial do sinal piloto CPLT ligando/desligando os comutadores SW(1) e SW(2) em resposta ao sinal de controle da CPU 520.
[0084] Em outras palavras, quando o comutador SW(1) é ligado e o comutador SW(2) é desligado em resposta ao sinal de controle da CPU 520, cada um dos elementos de resistência de redução R(2) e R(3) é desconectado do terra de veículo 518 e o potencial do sinal piloto CPLT é mantido no potencial inicial V(1). Como um resultado, o sinal piloto CPLT é mantido no estado não oscilante.
[0085] Quando o comutador SW(1) está DESLIGADO e o comuta dor SW(2) é ligado em resposta ao sinal de controle da CPU 520, o elemento de resistência de redução R(3) é conectado no terra de veí- culo 518. Portanto, o potencial do sinal piloto CPLT é diminuído para o potencial de oscilação V(2). Mais ainda, quando o comutador SW(1) é ligado em resposta ao sinal de controle da CPU 520, cada um dos elementos de resistência de redução R(2) e R(3) é conectado no terra de veículo 518. Portanto, o potencial do sinal piloto CPLT é adicionalmente diminuído para o potencial prescrito V(3).
[0086] O armazenamento temporário de entrada 508 recebe o si nal piloto CPLT da linha piloto de controle L(1), e emite o sinal piloto CPLT recebido para a CPU 512.
[0087] O armazenamento temporário de entrada 510 recebe o si nal de conexão de cabo PISW de uma linha de sinal L(2) conectada no comutador de limite 312 do conector 310, e emite o sinal de conexão de cabo PISW recebido para a CPU 514.
[0088] É notado que uma voltagem predeterminada (por exemplo, uma voltagem no mesmo nível que o potencial inicial V(1)) é aplicada na linha de sinal L(2) da ECU 170, e o sinal de conexão de cabo PISW é ajustado para o nível ALTO quando o conector 310 não está conectado na entrada de carregamento 270. Quando o conector 310 está conectado na entrada de carregamento 270 e o comutador de limite 312 é ligado, o potencial da linha de sinal L(2) é ajustado para o nível de terra e o sinal de conexão de cabo PISW é ajustado para o nível BAIXO. Em outras palavras, o fato de que o sinal de conexão de cabo PISW está no nível BAIXO significa o estado onde o cabo de carregamento 300 está conectado no veículo.
[0089] A CPU 514 determina se o conector 310 está ou não co nectado na entrada de carregamento 270, com base no sinal de conexão de cabo PISW do armazenamento temporário de entrada 510. Então, a CPU 514 emite o resultado da determinação para a CPU 512.
[0090] Um diagrama de blocos funcional do aparelho de controle de carregamento de acordo com a presente modalidade será descrito com referência à figura 7. Como mostrado na figura 7, este aparelho de controle de carregamento inclui uma unidade de detecção de VL(1) 522, e uma unidade de controle de carregamento 524.
[0091] A unidade de detecção de VL(1) 522 detecta um potencial VL(1) da linha piloto de controle L(1) com relação ao terra de veículo 518 (a voltagem entre a linha piloto de controle L(1) e o terra de veículo 518), e emite um sinal que indica o resultado da detecção para a unidade de controle de carregamento 524. O potencial da linha piloto de controle L(1) é ajustado para um potencial V(0) (por exemplo, 0 volt) quando o sinal piloto CPLT não é inserido do cabo de carregamento 300, e é ajustado para o potencial do sinal piloto CPLT quando o sinal piloto CPLT é inserido. É notado que o sinal piloto CPLT não é inserido na linha piloto de controle L(1) em todos os casos seguintes: o caso onde o cabo de carregamento 300 não está conectado na entrada de carregamento 270; o caso onde o cabo de carregamento 300 não está conectado na saída de fonte de alimentação 400 apesar do cabo de carregamento 300 estar conectado na entrada de carregamento 270; e o caso de um estado de falha de energia onde a energia elétrica não é suprida para a fonte de alimentação 402 apesar do cabo de carregamento 300 estar conectado na entrada de carregamento 270 e na saída de fonte de alimentação 400.
[0092] A unidade de controle de carregamento 524 controla os comutadores SW(1) e SW(2), o DFR 260, o SMR 250, o conversor 200, e os inversores 210 e 220, com base no SOC do dispositivo de armazenamento de energia 150 e na unidade de detecção de VL(1) 522, e ativa o sistema de carregamento e prepara para carregar. Além disso, a unidade de controle de carregamento 524 controla a energia elétrica de carregamento do cabo de carregamento 300.
[0093] O aparelho de controle de acordo com a presente modali dade que tem tais blocos funcionais pode ser implementado em for mas tanto de hardware quanto de software, o hardware formado principalmente de um circuito digital ou um circuito analógico e o software formado principalmente da CPU 520 e da memória incluída na ECU 170, e um programa lido da memória e executado pela CPU 520. Em geral, a implementação na forma de hardware é dita ser vantajosa em velocidade de operação, e a implementação na forma de software é dita ser vantajosa em mudança de projeto. A seguir, a implementação do aparelho de controle na forma de software será descrita. É notado que o meio de gravação que tem tal programa gravado no mesmo é também um aspecto da presente invenção.
[0094] Uma estrutura de controle do programa executado pela CPU 520 que serve como o aparelho de controle de carregamento de acordo com a presente modalidade, será descrita com referência à figura 8. É notado que este programa é executado repetidamente em um tempo de ciclo predeterminado.
[0095] Na etapa (que será daqui em diante abreviada como "S") 100, a CPU 520 determina se o potencial VL(1) da linha piloto de controle L(1) com relação ao terra de veículo 518 mudou ou não do potencial V(0) para o potencial inicial V(1). Se o potencial VL(1) da linha piloto de controle L(1) mudou para o potencial inicial V(1) (SIM em S100), o processo prossegue para S102. Se não (NÃO em S100), este processo termina.
[0096] Em S102, a CPU 520 começa a ativação do sistema de car regamento. Por exemplo, se a CPU 512 executar o processo em S100 acima, a CPU 512 envia um comando para ativar a CPU 514 para a CPU 514.
[0097] Em S104, a CPU 520 determina se a ativação do sistema de carregamento foi ou não completada. Por exemplo, quando a CPU 512 recebe um sinal de resposta para o comando de ativação em S102 acima da CPU 514, a CPU 520 determina que a ativação do sis- tema de carregamento foi completada.
[0098] Em S106, a CPU 520 envia um sinal de controle para ligar o comutador SW(2) para o comutador SW(2).
[0099] Em S108, a CPU 520 começa a preparação para o carre gamento. Por exemplo, a CPU 520 determina se o carregamento com a energia do cabo de carregamento 300 é possível ou não, com base no SOC do dispositivo de armazenamento de energia 150, a corrente nominal detectada do ciclo ativo do sinal piloto CPLT, e similares, e então determinando que o carregamento é possível, a CPU 520 faz com que o conversor 200 e os inversores 210, 220 aguardem em um estado operável.
[00100] Em S110, a CPU 520 determina se a preparação para o carregamento foi completada ou não. Se for determinado que a preparação para o carregamento foi completada (SIM em S110) o processo prossegue para S112. Se não (NÃO em S110), o processo é retornado para S110 e aguarda até que a preparação para o carregamento seja completada.
[00101] Em S112, a CPU 520 envia um sinal de controle para ligar o comutador SW(1) para o comutador SW(1).
[00102] Em S114, a CPU 520 liga o SMR 250 e o DFR 260, e começa o carregamento. Como um resultado, a energia elétrica CA da fonte de alimentação 402 é provida para o ponto neutro 112 do primeiro MG 110 e o ponto neutro 122 do segundo MG 120, e o carregamento do dispositivo de armazenamento de energia 150 é controlado.
[00103] Em S116, a CPU 520 determina se o carregamento terminou ou não. Por exemplo, quando o SOC do dispositivo de armazenamento de energia 150 atinge um valor predeterminado, a CPU 520 determina que o carregamento terminou. Se for determinado que o carregamento terminou (SIM em S116), o processo prossegue para S118. Se não (NÃO em S116), o processo é retornado para S116 e aguarda até que o carregamento termine.
[00104] Em S118, a CPU 520 envia sinais de controle para desligar os comutadores SW(1) e SW(2) para os comutadores SW(1) e SW(2), respectivamente.
[00105] O comportamento do sinal piloto CPLT controlado pelo aparelho de controle de carregamento de acordo com a presente modalidade com base na estrutura e no fluxograma acima será descrito. NO INÍCIO DO CARREGAMENTO
[00106] No tempo T(1), quando o usuário conecta o cabo de carregamento 300 na saída de fonte de alimentação 400, a energia elétrica da fonte de alimentação 402 é suprida para o controlador de EVSE 334, e o potencial do sinal piloto CPLT aumenta de V(0) (0 volt) para o potencial inicial V(1) como mostrado na figura 9.
[00107] No tempo T(2), quando o usuário conecta o cabo de carregamento 300 na entrada de carregamento 270 (isto é, no veículo), o sinal piloto CPLT é inserido da linha piloto de controle L(1) no lado do veículo.
[00108] Convencionalmente, o comutador SW(2) não está provido e o elemento de resistência de redução R(3) está constantemente conectado no terra de veículo 518. Portanto, no tempo T(2) quando o cabo de carregamento 300 está conectado na entrada de carregamento 270, o potencial do sinal piloto CPLT é diminuído do potencial inicial V(1) para o potencial de oscilação V(2), e o oscilador 602 do cabo de carregamento 300 faz com que o sinal piloto CPLT oscile (vide uma linha B tracejada alternada longa e curta na figura 9). Por esta razão, se uma tentativa de utilizar o sinal piloto CPLT como o sinal de ativação para o sistema de carregamento for feita, um conversor de F/V (Frequência Para Voltagem) complicado deve ser utilizado.
[00109] Assim, na presente modalidade, o comutador SW(2) está provido entre o elemento de resistência de redução R(3) e o terra de veículo 518, e no estado de não carregamento, o comutador SW(2) é desligado e o elemento de resistência de redução R(3) é desconecta- do do terra de veículo 518.
[00110] Como um resultado, como mostrado por uma linha sólida A na figura 9, mesmo se o cabo de carregamento 300 for conectado no veículo no tempo T(2), o potencial do sinal piloto CPLT fica retido no potencial inicial V(1). Portanto, pode ser prontamente determinado que o potencial VL(1) da linha piloto de controle L(1) mudou de V(0) para V(1), sem utilizar o conversor de F/V complicado. Quando o potencial VL(1) mudou de V(0) para V(1) (SIM em S100), é determinado que o conector 310 do cabo de carregamento 300 foi conectado na entrada de carregamento 270, e ativação do sistema de carregamento pode começar (S102). Como um resultado, mesmo se um circuito para detectar o sinal de conexão de cabo PISW ou o comutador de limite 312 dentro do cabo de carregamento 300 falhar, por exemplo, pode ser apropriadamente determinado que o cabo de carregamento 300 foi conectado no veículo, com base no potencial VL(1), e a ativação do sistema de carregamento pode começar.
[00111] É notado que, no tempo T(3), quando a ativação do sistema de carregamento é completada (SIM em S104) e o comutador SW(2) é ligado (S106), o potencial do sinal piloto CPLT é diminuído para o potencial de oscilação V(2). No tempo T(4), o sinal piloto CPLT começa a oscilar e a preparação para o carregamento começa (S108). No tempo T(5), quando a preparação para o carregamento é completada (SIM em S110) e o comutador SW(1) é ligado (S112), o potencial do sinal piloto CPLT é adicionalmente diminuído para o potencial V(3). Como um resultado, o relé 332 no conector 310 dentro do cabo de carregamento 300 é ligado, e além disso, o SMR 250 e o DFR 260 são ligados no lado do veículo e o carregamento começa (S114). NA FINALIZAÇÃO DO CARREGAMENTO
[00112] Como mostrado na figura 10, no tempo T(6), quando o carregamento é completado (SIM em S116), o comutador SW(1) e o comutador SW(2) são desligados (S118).
[00113] Convencionalmente, o comutador SW(2) não é provido, e mesmo se o comutador SW(1) for desligado no tempo T(6) quando o carregamento é completado, o elemento de resistência de redução R(3) está constantemente conectado no terra de veículo 518. Portanto, o potencial do sinal piloto CPLT somente aumenta de V(3) para o potencial de oscilação V(2), e o sinal piloto CPLT continua oscilando mesmo após o término do carregamento (vide uma linha B tracejada alternada longa e curta na figura 10), o que é o mesmo que o estado quando o cabo de carregamento 300 está conectado no veículo no iní-cio do carregamento (vide uma linha B tracejada alternada longa e curta na figura 9). Portanto, um novo processo para proibir a recarga é requerido.
[00114] Assim, na presente modalidade, o comutador SW(2) está provido entre o elemento de resistência de redução R(3) e o terra de veículo 518, e no término do carregamento, os comutadores SW(1) e SW(2) são desligados e ambos os elementos de resistência de redução R(2) e R(3) são desconectados do terra de veículo 518. Mais ainda, a menos que o potencial VL(1) da linha piloto de controle L(1) mude do potencial V(0) para o potencial inicial V(1), a ativação do sistema de carregamento não começa (NÃO em S100).
[00115] Como um resultado, como mostrado pela linha sólida A na figura 10, o potencial VL(1) da linha piloto de controle L(1) não muda do potencial V(0) para o potencial inicial V(1) no término do carregamento. Portanto, a ativação do sistema de carregamento não começa (NÃO em S100) e a recarga não é executada. Como um resultado, a recarga ou a sobredescarga após o término do carregamento pode ser proibida sem requerer o novo processo para proibir a recarga.
[00116] Como acima descrito, de acordo com o aparelho de controle de carregamento da presente modalidade, o elemento de resistência de redução para mudar o potencial do sinal piloto CPLT emitido do os- cilador provido dentro do cabo de carregamento do potencial inicial V(1) para o potencial de oscilação V(2) está provido no lado do veículo, e o comutador está provido entre este elemento de resistência de redução e o terra de veículo. No estado de não carregamento, o elemento de resistência de redução é desconectado do terra de veículo. Como um resultado, mesmo se o cabo de carregamento estiver conectado no veículo, o sinal piloto CPLT não oscila e o potencial do sinal piloto CPLT é retido no potencial inicial V(1). Portanto, pode ser pron-tamente determinado que o potencial da linha piloto de controle mudou para o potencial inicial V(1). Assim, o sinal piloto CPLT pode ser prontamente utilizado como o sinal de ativação para o sistema de carregamento. MODIFICAÇÃO DA PRIMEIRA MODALIDADE
[00117] No aparelho de controle de carregamento da primeira modalidade acima descrita, um temporizador de carregamento 406 pode ser provido entre o plugue 320 e a saída de fonte de alimentação 400 como mostrado na figura 11.
[00118] Este temporizador de carregamento 406 é um temporizador barato que é tipicamente comercialmente disponível. O temporizador de carregamento 406 interrompe a alimentação de energia elétrica da fonte de alimentação 402 para o cabo de carregamento 300 até que um tempo de início de carregamento pré-selecionado pelo usuário chegue, e começa a alimentação de energia elétrica da fonte de alimentação 402 para o cabo de carregamento 300 quando o tempo de início de carregamento chegue. É notado que o temporizador de carregamento 406 pode incluir uma função de interromper a alimentação de energia elétrica da fonte de alimentação 402 quando um tempo de término de carregamento pré-selecionado pelo usuário chega.
[00119] O comportamento do sinal piloto CPLT e do sinal de conexão de cabo PISW quando tal temporizador de carregamento 406 é utilizado será descrito com referência à figura 12.
[00120] O nível de sinal do sinal de conexão de cabo PISW muda do nível ALTO para o nível BAIXO no tempo T(7) quando o usuário conecta o cabo de carregamento 300 no veículo com antecedência, e permanece no nível BAIXO mesmo quando um tempo de início de carregamento pré-selecionado T(8) chega. Portanto, o sinal de conexão de cabo PISW não pode ser utilizado como o sinal de ativação para o sistema de carregamento quando o temporizador de carregamento 406 é utilizado.
[00121] Por outro lado, o potencial do sinal piloto CPLT é mantido em V(0) (0 volt) como mostrado na figura 12 porque a energia elétrica da fonte de alimentação 402 não é suprida para o controlador de EVSE 334 até que o tempo de início de carregamento pré-selecionado T(8) chegue. Após isto, quando o tempo de início de carregamento T(8) chega, a energia elétrica da fonte de alimentação 402 é suprida para o controlador de EVSE 334, e o potencial do sinal piloto CPLT muda de V(0) para o potencial inicial V(1) como mostrado na figura 12. Até o tempo T(9) quando o comutador SW(2) é ligado, o potencial do sinal piloto CPLT é retido no potencial inicial V(1) como na primeira modalidade acima descrita. Portanto, pode ser prontamente determi-nado que o potencial VL(1) mudou de V(0) para V(1). Quando o potencial VL(1) mudou do potencial V(0) para o potencial inicial V(1) (SIM em S100), a ativação do sistema de carregamento começa (S102).
[00122] Como acima descrito, simplesmente conectando o temporizador de carregamento comercialmente disponível e barato entre o plugue 320 e a saída de fonte de alimentação 400, sem prover a função de temporizador de carregamento no lado do veículo, permite o carregamento no tempo de início de carregamento (por exemplo, durante a noite quando a tarifa de energia elétrica é barata) pré- selecionado pelo usuário. SEGUNDA MODALIDADE
[00123] Um aparelho de controle de carregamento de acordo com a presente modalidade será daqui em diante descrito. A configuração do aparelho de controle de carregamento de acordo com a presente modalidade é diferente daquela do aparelho de controle de carregamento de acordo com a primeira modalidade acima descrita em que a CPU 520 ainda executa um programa que tem uma estrutura de controle mostrada na figura 14 que será daqui em diante descrita, além do programa acima que tem a estrutura de controle mostrada na figura 8. A configuração restante do aparelho de controle de carregamento de acordo com a presente modalidade é a mesma que aquela do aparelho de controle de carregamento de acordo com a primeira modalidade acima descrita. As suas funções são também as mesmas. Consequentemente, uma descrição detalhada destas não será aqui repetida.
[00124] A figura 13 é uma tabela que provê o potencial do sinal piloto CPLT e o nível do sinal de conexão de cabo PISW no estado de sinal do sinal de conexão de cabo PISW e no estado do cabo de carregamento 300. Na figura 13, o estado anormal refere-se ao estado de sinal de sinal de conexão de cabo PISW quando o comutador de limite 312 falha ou a linha de sinal L(2) é interrompida. O estado conectado significa que o cabo de carregamento 300 está conectado no veículo e na fonte de alimentação 402, e o estado não conectado significa que o cabo de carregamento 300 não está conectado nem no veículo nem na fonte de alimentação 402. Além disso, o estado de espera refere-se ao estado onde a energia elétrica da fonte de alimentação 402 não é suprida para o cabo de carregamento 300 apesar do cabo de carregamento 300 e o veículo estarem conectados (o estado onde o cabo de carregamento 300 não está conectado na fonte de alimentação 402, o estado onde o tempo de início de carregamento do temporizador de carregamento ainda não chegou apesar do cabo de carregamento 300 estar conectado na fonte de alimentação 402, o estado onde a energia elétrica não é suprida para a fonte de alimentação 402 devido a uma falha de energia apesar do cabo de carregamento 300 estar conectado na fonte de alimentação 402, e similares). É notado que os valores do sinal piloto CPLT são todos normais.
[00125] Como está claro da figura 13, o sinal de conexão de cabo PISW pode ser ajustado para o nível ALTO tanto no estado normal quanto no estado anormal. É somente quando o sinal de conexão de cabo PISW está no estado anormal (o estado onde o comutador de limite 312 falha ou a linha de sinal L(2) está interrompida) que o sinal de conexão de cabo PISW é ajustado para o nível ALTO apesar do potencial do sinal piloto CPLT estar no potencial inicial V(1). Assim, o aparelho de controle de carregamento de acordo com a presente modalidade compara o sinal de conexão de cabo PISW e o sinal piloto CPLT, e detecta uma anormalidade no sinal de conexão de cabo PISW (isto é, uma falha do comutador de limite 312 ou uma interrupção na linha de sinal L(2)).
[00126] A estrutura de controle do programa executado pela CPU 520 que configura o aparelho de controle de carregamento de acordo com a presente modalidade será descrita com referência à figura 14.
[00127] Em S200, a CPU 520 determina se o potencial VL(1) da linha piloto de controle L(1) está ou não no potencial inicial V(1). Se o potencial VL(1) da linha piloto de controle L(1) estiver no potencial inicial V(1) (SIM em S200), o processo prossegue para S202. Se não (NÃO em S200), este processo termina.
[00128] Em S202, a CPU 520 determina se o sinal de conexão de cabo PISW está ou não no nível ALTO. Se o sinal de conexão de cabo PISW estiver no nível ALTO (SIM em S202), o processo prossegue para S204. Se não (NÃO em S202), o processo prossegue para S206.
[00129] Em S204, a CPU 520 determina que o sinal de conexão de cabo PISW é anormal e o comutador de limite 312 falha ou a linha de sinal L(2) está interrompida. Em S206, a CPU 520 determina que o sinal de conexão de cabo PISW é normal.
[00130] A detecção da anormalidade no sinal de conexão de cabo PISW pelo aparelho de controle de carregamento de acordo com a presente modalidade com base na estrutura e no fluxograma acima será descrita.
[00131] Como mostrado na figura 15, quando o sinal de conexão de cabo PISW é mantido no nível ALTO apesar do sinal piloto CPLT ser mantido em V(1) (SIM em S200, SIM em S202) do tempo T(10) quando o cabo de carregamento 300 está conectado no veículo até o tempo T(12) quando o comutador SW(2) é ligado, é determinado que o sinal de conexão de cabo PISW é anormal e o comutador de limite 312 falha ou a linha de sinal L(2) está interrompida (S204).
[00132] Como acima descrito, de acordo com o aparelho de controle de carregamento de acordo com a presente modalidade, o comutador está provido entre o terra de veículo e o elemento de resistência de redução para mudar o potencial do sinal piloto CPLT do potencial inicial V(1) para o potencial de oscilação V(2), e o elemento de resistência de redução é desconectado do terra do veículo no estado de não carregamento. Portanto, pode ser prontamente determinado que o potencial da linha piloto de controle está retido no potencial inicial V(1). Quando é detectado que o sinal de conexão de cabo PISW permanece no nível ALTO apesar do sinal piloto CPLT ser retido no potencial inicial V(1), pode ser determinado que o sinal de conexão de cabo PISW é anormal. Portanto, o sinal piloto CPLT pode ser prontamente utilizado para a detecção da anormalidade no sinal de conexão de cabo PISW. TERCEIRA MODALIDADE
[00133] Um aparelho de controle de carregamento de acordo com a presente modalidade será daqui em diante descrito. A configuração do aparelho de controle de carregamento de acordo com a presente modalidade é diferente daquela do aparelho de controle de carregamento de acordo com a primeira modalidade acima descrita em que a CPU 520 ainda executa um programa que tem uma estrutura de controle mostrada na figura 16 que será daqui em diante descrita para detectar uma falha de energia e a recuperação da falha de energia, além do programa que tem a estrutura de controle acima mostrada na figura 8. A configuração restante do aparelho de controle de carregamento de acordo com a presente modalidade é a mesma que aquela do aparelho de controle de carregamento de acordo com a primeira modalidade acima descrita. As suas funções são também as mesmas. Consequentemente, uma descrição detalhada destas não será aqui repetida.
[00134] A estrutura de controle do programa executado pela CPU 220 que configura o aparelho de controle de carregamento de acordo com a presente modalidade será descrita com referência à figura 16.
[00135] Em S300, a CPU 520 determina se o sinal de conexão de cabo PISW está ou não no nível BAIXO. Se o sinal de conexão de cabo PISW estiver no nível BAIXO (SIM em S300), o processo prossegue para S302. Se não (NÃO em S300), este processo termina.
[00136] Em S302, a CPU 520 determina se o potencial VL(1) da linha piloto de controle L(1) está ou não no potencial inicial V(0). Se o potencial VL(1) da linha piloto de controle L(1) estiver em V(0) (SIM em S302), o processo prossegue para S304. Se não (NÃO em S302), este processo termina.
[00137] Em S304, a CPU 520 determina que a falha de energia ocorreu. É notado que a falha de energia aqui refere-se ao estado onde a alimentação de energia elétrica para a fonte de alimentação 402 é parada.
[00138] Em S306, a CPU 520 determina se o potencial VL(1) da linha piloto de controle L(1) mudou ou não do potencial V(0) para o potencial inicial V(1). Se o potencial VL(1) da linha piloto de controle L(1) mudou do potencial V(0) para o potencial inicial V(1) (SIM em S306), o processo prossegue para S308. Se não (NÃO em S306), o processo é retornado para S306 e aguarda até que o potencial VL(1) da linha piloto de controle L(1) mude do potencial V(0) para o potencial inicial V(1).
[00139] Em S308, a CPU 520 determina que a recuperação da falha de energia foi conseguida. Em outras palavras, a CPU 520 determina que a alimentação de energia elétrica para a fonte de alimenta-ção 402 reiniciou.
[00140] A determinação da falha de energia e a recuperação da falha de energia pelo aparelho de controle de carregamento de acordo com a presente modalidade, com base na estrutura e no fluxograma acima serão descritas.
[00141] Como mostrado na figura 17, no tempo T(13) quando o cabo de carregamento 300 está conectado no veículo, o sinal de conexão de cabo PISW muda do nível ALTO para o nível BAIXO. O potencial do sinal piloto CPLT, no entanto, permanece no potencial V(0) devido à falha de energia, até o tempo T(14) quando a recuperação da falha de energia é conseguida. Assim, quando o potencial VL(1) da linha piloto de controle L(1) é mantido no potencial V(0) apesar do sinal de conexão de cabo PISW estar no nível BAIXO (SIM em S300, SIM em S302), é determinado que a falha de energia ocorreu (S304).
[00142] Quando a recuperação da falha de energia é conseguida no tempo T(14) subsequente, o potencial do sinal piloto CPLT automaticamente muda do potencial V(0) para o potencial inicial V(1) como mostrado na figura 17. Quando é detectado que o potencial VL(1) da linha piloto de controle L(1) mudou do potencial inicial V(1) (SIM em S306), é determinado que a recuperação da falha de energia foi conseguida (S308). É notado que, no tempo da recuperação da falha de energia também, o potencial do sinal piloto CPLT está retido no potencial inicial V(1) até que o comutador SW(2) seja ligado, como na primeira modalidade acima descrita.
[00143] Como acima descrito, de acordo com o aparelho de controle de carregamento da presente modalidade, o comutador está provido entre o terra de veículo e o elemento de resistência de redução para mudar o potencial do sinal piloto CPLT do potencial inicial V(1) para o potencial de oscilação V(2) e o elemento de resistência de redução é desconecta- do do terra do veículo no estado de não carregamento. Portanto, pode ser prontamente determinado que o potencial da linha piloto de controle está retido no potencial inicial V(1). Quando é detectado que o potencial VL(1) da linha piloto de controle L(1) mudou do potencial V(0) para o potencial inicial V(1) enquanto o sinal de conexão de cabo PISW está no nível BAIXO, pode ser determinado que a recuperação da falha de energia foi conseguida. Mais ainda, no tempo da recuperação da falha de energia também, a ativação do sistema de carregamento pode começar em resposta à mudança no potencial VL(1) da linha piloto de controle L(1) do potencial V(0) para o potencial inicial V(1). Portanto, o carregamento pode reiniciar sem a necessidade de uma operação problemática tal como a inserção e a remoção pelo usuário do cabo de carregamento 300 novamente no tempo da recuperação da falha de energia, o que pode melhorar a conveniência do usuário.
[00144] Deve ser compreendido que as modalidades aqui descritas são ilustrativas e não limitativas em nenhum aspecto. O escopo da presente invenção é definido pelos termos das reivindicações, ao invés da descrição acima, e pretende incluir quaisquer modificações dentro do escopo e do significado equivalente dos termos das reivindicações.