WO2020095416A1 - ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 - Google Patents
ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 Download PDFInfo
- Publication number
- WO2020095416A1 WO2020095416A1 PCT/JP2018/041521 JP2018041521W WO2020095416A1 WO 2020095416 A1 WO2020095416 A1 WO 2020095416A1 JP 2018041521 W JP2018041521 W JP 2018041521W WO 2020095416 A1 WO2020095416 A1 WO 2020095416A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- engine
- temperature
- gpf
- hybrid vehicle
- motoring
- Prior art date
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
- B60W20/16—Control strategies specially adapted for achieving a particular effect for reducing engine exhaust emissions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/46—Series type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
- B60W20/14—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion in conjunction with braking regeneration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01N—GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR MACHINES OR ENGINES IN GENERAL; GAS-FLOW SILENCERS OR EXHAUST APPARATUS FOR INTERNAL COMBUSTION ENGINES
- F01N3/00—Exhaust or silencing apparatus having means for purifying, rendering innocuous, or otherwise treating exhaust
- F01N3/02—Exhaust or silencing apparatus having means for purifying, rendering innocuous, or otherwise treating exhaust for cooling, or for removing solid constituents of, exhaust
- F01N3/021—Exhaust or silencing apparatus having means for purifying, rendering innocuous, or otherwise treating exhaust for cooling, or for removing solid constituents of, exhaust by means of filters
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D45/00—Electrical control not provided for in groups F02D41/00 - F02D43/00
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0666—Engine power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/068—Engine exhaust temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2530/00—Input parameters relating to vehicle conditions or values, not covered by groups B60W2510/00 or B60W2520/00
- B60W2530/12—Catalyst or filter state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/086—Power
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Definitions
- the present invention relates to control of a hybrid vehicle.
- JP2015-202832A and JP2018-83570A disclose hybrid vehicles equipped with a filter that collects particulate matter, that is, PM, in exhaust gas of an engine.
- Some hybrid vehicles have a series hybrid mode in which an engine drives a motor generator for power generation to generate power, and electric power generated by the motor generator for power generation drives the motor generator for running.
- an engine drives a motor generator for power generation to generate power
- electric power generated by the motor generator for power generation drives the motor generator for running.
- PM accumulated on the filter can be burned to regenerate the filter.
- the temperature of the filter may rise excessively as a result of burning PM, and the filter may deteriorate.
- the present invention has been made in view of such problems, and an object thereof is to suppress deterioration of a filter due to excessive temperature rise in a hybrid vehicle having a series hybrid mode.
- a hybrid vehicle control method includes an engine, a power generation motor generator, and a traveling motor generator, and drives the power generation motor generator with the engine to generate power, and uses the power generated by the power generation motor generator.
- a hybrid vehicle control device corresponding to the hybrid vehicle control method.
- FIG. 1 is a schematic configuration diagram of a hybrid vehicle.
- FIG. 2 is a schematic configuration diagram of the exhaust system of the engine.
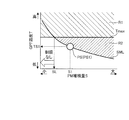
- FIG. 3 is a diagram illustrating the relationship between the PM deposition amount and the allowable GPF temperature.
- FIG. 4 is an explanatory diagram of engine operation restriction.
- FIG. 5 is a first explanatory diagram of the engine operation limiting method.
- FIG. 6 is a second explanatory diagram of the engine operation limiting method.
- FIG. 7 is a flowchart illustrating an example of control according to the first embodiment.
- FIG. 8 is a diagram showing an example of a timing chart of the first embodiment.
- FIG. 9 is a diagram illustrating the operation mode of the engine.
- FIG. 10 is a flowchart showing an example of control according to the second embodiment.
- FIG. 11 is a diagram showing an example of a timing chart of the second embodiment.
- FIG. 1 is a schematic configuration diagram of a hybrid vehicle 100.
- FIG. 2 is a schematic configuration diagram of the exhaust system 10 of the engine 1.
- a hybrid vehicle 100 includes an engine 1, a power-generating motor generator 2, a traveling motor generator 3, a first inverter 4, a second inverter 5, a battery 6, and a differential mechanism 7. , A drive wheel 8 and a controller 20.
- hybrid vehicle 100 is referred to as vehicle 100, and the motor generator is referred to as MG.
- the engine 1 is a gasoline engine and is connected to the MG 2 for power generation.
- the power generation MG 2 is driven by the engine 1 to generate power.
- the traveling MG 3 is connected to the drive wheels 8 via the differential mechanism 7.
- the traveling MG3 drives the vehicle 100 and regenerates energy during deceleration.
- the power-generating MG2 and the traveling MG3 form a high-voltage voltage circuit 9 together with the first inverter 4, the second inverter 5, the battery 6, and the like.
- the first inverter 4 is used for controlling the MG 2 for power generation
- the second inverter 5 is used for controlling the MG 3 for traveling.
- Each of the first inverter 4 and the second inverter 5 generates a three-phase alternating current based on a command from the controller 20, and applies the generated three-phase alternating current to a corresponding MG of the MG2 for power generation and the MG3 for traveling.
- the first inverter 4 and the second inverter 5 may be integrated.
- the battery 6 constitutes a power source of the MG 2 for power generation and the MG 3 for traveling. Battery 6 is charged with electric power supplied from traveling MG 3 during regeneration. The battery 6 may be charged with the electric power supplied from the MG 2 for power generation.
- the exhaust system 10 includes an exhaust passage 11, a catalytic converter 12, a gasoline particulate filter (hereinafter referred to as GPF) 13, and a muffler 14.
- the exhaust passage 11 circulates the exhaust gas of the engine 1.
- the catalytic converter 12 is provided immediately after the engine 1 and purifies the exhaust gas by oxidizing unburned components such as HC and CO contained in the exhaust gas and reducing oxidized components such as NOx.
- the GPF 13 is provided on the downstream side of the catalytic converter 12 and collects particulate matter, that is, PM in the exhaust gas of the engine 1.
- the GPF 13 may further include a catalyst.
- the muffler 14 is provided downstream of the GPF 13 and reduces exhaust noise.
- the exhaust passage 11 is provided with a differential pressure sensor 21 that detects a differential pressure between the inlet exhaust pressure Pin of the GPF 13 and the outlet exhaust pressure Pout of the GPF 13.
- the PM deposition amount S of the GPF 13 can be estimated based on the pressure difference between the inlet exhaust pressure Pin of the GPF 13 and the outlet exhaust pressure Pout.
- An exhaust gas temperature sensor 23 for detecting the exhaust gas temperature Tex is provided in the exhaust passage 11 connected to the inlet of the GPF 13, and a GPF temperature T, which is the floor temperature of the GPF 13, is provided in the exhaust passage 11 connected to the outlet of the GPF 13.
- a GPF temperature sensor 24 for detecting is further provided.
- the GPF temperature T can be detected as the actual temperature of the temperature of the GPF 13 based on the output signal from the GPF temperature sensor 24.
- the controller 20 is composed of one or a plurality of microcomputers including a central processing unit (CPU), a read only memory (ROM), a random access memory (RAM), and an input / output interface (I / O interface). To be done.
- the controller 20 integrally controls the engine 1, the first inverter 4, the second inverter 5, etc. by executing the program stored in the ROM or the RAM by the CPU.
- the controller 20 includes a first pressure sensor 21, a second pressure sensor 22, an exhaust temperature sensor 23, a GPF temperature sensor 24, a vehicle speed sensor 25 for detecting a vehicle speed VSP, and an accelerator for detecting an accelerator opening APO.
- An opening sensor 26, a brake sensor 27 for detecting the pedal effort BPF of the brake pedal, a rotation speed sensor 28 for detecting the rotation speed Ne of the engine 1, and a battery state quantity SOC indicating the state of charge of the battery 6 are detected. Signals from various sensors and switches such as the SOC sensor 29 for input are input. These signals are used for the control performed by the controller 20.
- the controller 20 has an EV mode and a series hybrid mode (hereinafter referred to as a series HEV mode) as driving modes of the vehicle 100.
- the EV mode is a mode in which the traveling MG3 is driven by the electric power supplied from the battery 6 and traveling is performed by the driving force of only the traveling MG3.
- the series HEV mode is a mode in which the engine 1 drives the power generation MG2 to generate electric power, and the traveling MG3 is driven by the electric power generated by the power generation MG2.
- the controller 20 selects a travel mode based on the accelerator opening APO, the pedal effort BPF of the brake pedal, and the vehicle speed VSP, taking into account a travel mode selection map (not shown), and selects the travel mode to achieve the selected travel mode. And driving MG3 for traveling.
- the PM accumulated in the GPF 13 can be burned to regenerate the GPF 13.
- the present embodiment suppresses the deterioration of the GPF 13 as described below.
- FIG. 3 is a diagram for explaining the relationship between the PM deposition amount S and the allowable GPF temperature TS.
- the line SML shows the allowable GPF temperature TS according to the PM accumulation amount S.
- the line SML shows the relationship between the PM deposition amount S and the allowable GPF temperature TS.
- the allowable GPF temperature TS is an upper limit value of the GPF temperature T corresponding to the motoring of the engine 1, and the upper limit value of the GPF temperature T at which the GPF 13 does not excessively rise due to the combustion of PM according to the motoring of the engine 1 is PM. It is set according to the deposition amount S. As can be seen from the line SML, the allowable GPF temperature TS decreases as the PM deposition amount S increases.
- the maximum GPF temperature Tmax is the GPF temperature T when the exhaust temperature Tex of the engine 1 is the maximum temperature, and the GPF temperature T usually does not exceed this maximum GPF temperature Tmax. Therefore, the state point PS determined by the PM deposition amount S and the GPF temperature T is not included in the region R1 on the higher temperature side than the maximum GPF temperature Tmax.
- the region R2 which is a region on the higher temperature side than the line SML and does not overlap the region R1, is an avoidance region where the intrusion of the state point PS should be avoided.
- the first predetermined amount SL is the PM accumulation amount S corresponding to the case where the GPF temperature T is the maximum GPF temperature Tmax on the line SML.
- the first predetermined amount SL is the PM deposition amount when the allowable GPF temperature TS is the maximum GPF temperature Tmax, that is, when the allowable GPF temperature TS is the temperature corresponding to the maximum temperature of the exhaust temperature Tex of the engine 1. It is S.
- the PM deposition amount S is equal to or less than the first predetermined amount SL, the GPF temperature T will not exceed the allowable GPF temperature TS. Therefore, when the PM accumulation amount S is less than or equal to the first predetermined amount SL, it is not necessary to limit the operation of the engine 1.
- the allowable GPF temperature TS1 which is the allowable GPF temperature TS corresponding to the accumulation amount S1 is determined based on the line SML.
- the GPF temperature T exceeds the allowable GPF temperature TS1
- the state point PS enters the region R2, and there is a concern that the GPF 13 may deteriorate due to excessive temperature rise during motoring. Therefore, in this embodiment, the operation of the engine 1 is restricted as described below.
- FIG. 4 is an explanatory diagram of the operation restriction of the engine 1.
- an isotherm of the allowable GPF temperature TS1 an isotherm of a temperature Tmp1 lower than the allowable GPF temperature TS1
- the engine 1 starts the power generation operation of driving the MG2 for power generation to generate power.
- the operating point PE of the engine 1 is changed from the operating point PE1 to the operating point PE2.
- the operating point PE1 is the operating point PE when the PM deposition amount S is the deposition amount S1 and the GPF temperature T is the temperature Tmp2, and the operating point PE2 is in the region R3 on the higher temperature side than the isotherm of the allowable GPF temperature TS1. It is the operating point PE.
- the PM accumulated in the GPF 13 rapidly burns due to a high temperature exceeding the allowable GPF temperature TS1, and an excessive temperature rise of, for example, more than 1000 ° C. occurs in the GPF 13, resulting in deterioration of the GPF 13. Is concerned.
- the operating region of the engine 1 is limited to the operating region on the lower temperature side than the region R3.
- the operation of the engine 1 is restricted so that the operating point PE is out of the region R3.
- the operation of the engine 1 is limited based on the allowable GPF temperature TS corresponding to the PM accumulation amount S.
- the operation restriction of the engine 1 can be performed as follows.
- FIG. 5 is a first explanatory diagram of the method for restricting the operation of the engine 1.
- the exhaust gas temperature Tex1 indicates the exhaust gas temperature Tex corresponding to the allowable GPF temperature TS1.
- the two-dot broken line indicates the equal output line of the engine 1.
- FIG. 5 shows a case where the sound and vibration performance of the engine 1 is not considered. Both the exhaust temperature Tex and the output of the engine 1 become higher as the rotational speed Ne and the torque Tq become higher, that is, in the upper right direction in FIG.
- the GPF temperature T be equal to or lower than the allowable GPF temperature TS1. Therefore, the exhaust temperature Tex needs to be suppressed to the exhaust temperature Tex1 at the maximum. On the other hand, when operating the engine 1, it is desired to obtain the highest possible efficiency.
- the upper limit operating point PEmax of the engine 1 is set at a position where the output becomes highest on the isotherm of the exhaust temperature Tex1 and the engine 1 is operated at the rotation speed Ne and the torque Tq that are equal to or lower than the upper limit operating point PEmax, It becomes possible to operate the engine 1 efficiently while restricting the operation.
- the upper limit operating point PEmax1 is the upper limit operating point PEmax set in this way and can be set in advance.
- the upper limit operating point PEmax can be set as follows.
- FIG. 6 is a second explanatory diagram of the operation restriction method of the engine 1.
- the region RNV indicates a region where the sound and vibration performance of the engine 1 does not meet the standard.
- the upper limit operating point PEmax needs to be set while avoiding the region RNV. Therefore, the upper limit operating point PEmax is set to a position where the output is highest on the isotherm of the exhaust temperature Tex1 outside the region RNV.
- the upper limit operating point PEmax2 is the upper limit operating point PEmax set in this way and can be set in advance. In this case, even when operating the engine 1 at the rotation speed Ne and the torque Tq that are equal to or lower than the upper limit operating point PEmax2, the operation of the engine 1 is performed while avoiding the region RNV.
- FIG. 7 is a flowchart showing an example of control performed by the controller 20.
- the controller 20 determines whether the PM accumulation amount S is larger than the first predetermined amount SL. If a negative determination is made in step S11, the process ends once. That is, when the PM deposition amount S is less than or equal to the first predetermined amount SL, the controller 20 does not limit the operation of the engine 1 in step S14 described below. If a positive determination is made in step S11, the process proceeds to step S12.
- step S12 the controller 20 calculates the allowable GPF temperature TS.
- the allowable GPF temperature TS can be calculated by obtaining the allowable GPF temperature TS corresponding to the current PM deposition amount S from the line SML.
- step S13 the controller 20 determines whether the GPF temperature T is higher than the allowable GPF temperature TS. If the GPF temperature T is equal to or lower than the allowable GPF temperature TS, the GPF 13 will not be deteriorated due to excessive temperature rise during motoring of the engine 1. Therefore, if the negative determination is made in step S13, the process is once ended.
- step S13 If the GPF temperature T is higher than the allowable GPF temperature TS, it is feared that the GPF 13 may be deteriorated due to excessive temperature rise during motoring of the engine 1. Therefore, if an affirmative determination is made in step S13, the process proceeds to step S14, and the controller 20 executes the operation restriction of the engine 1.
- the operation limitation of the engine 1 is performed by limiting the operation area of the engine 1.
- step S14 the process ends once.
- FIG. 8 is a diagram showing an example of a timing chart corresponding to the flowchart shown in FIG. 7.
- the required driving force starts to increase, and EV traveling in the EV mode is started. Therefore, the vehicle speed VSP and the output of the traveling MG3 start to increase, and the battery state quantity SOC starts to decrease.
- the required driving force becomes constant, the vehicle speed VSP and the output of the traveling MG3 become constant.
- the battery state quantity SOC becomes the charging lower limit value VL of the battery 6. Therefore, the power generation operation of the engine 1 is started, the rotation speed Ne and the torque Tq increase, and the power generation amount of the power generation MG2 increases.
- the exhaust gas temperature Tex and the GPF temperature T also start to rise.
- the GPF temperature T exceeds the allowable GPF temperature TS. Therefore, the operation limitation of the engine 1 is executed, the rotation speed Ne and the torque Tq are reduced, and the power generation amount of the power generation MG2 is reduced.
- the battery state quantity SOC reaches the first charge upper limit value VH1 of the battery 6, and the power generation operation of the engine 1 is stopped.
- the first charge upper limit value VH1 is a charge upper limit value of the battery 6 when the charge regenerative braking described later is not performed.
- the rotation speed Ne, the torque Tq, and the power generation amount of the power generation MG2 become zero in accordance with the stop of the power generation operation, and the battery state amount SOC starts to decrease.
- the power generation operation of the engine 1 is stopped, so that the operation of the engine 1 is not restricted.
- charging regenerative braking that charges the battery 6 with the regenerated electric power while performing the regenerative braking by the traveling MG3 is started.
- Charging regenerative braking is started as follows. That is, when the deceleration of the vehicle 100 is started, the required driving force is first gradually reduced, and accordingly, when the output of the traveling MG3 is gradually reduced to the preset negative regenerative braking output, the charge regenerative braking is performed. Be started. Charging regenerative braking is performed for the following reasons.
- the required driving force becomes zero, and then the preset regenerative braking driving force is reached. From timing T8, the vehicle travels on a downhill road, the required driving force becomes zero or less, and regenerative braking is performed by the traveling MG3, so that the vehicle speed VSP becomes constant.
- the battery state quantity SOC becomes the second charge upper limit value VH2 of the battery 6.
- the second charge upper limit value VH2 is the charge upper limit value of the battery 6 set when performing the charge regenerative braking, and the first charge upper limit value is set in order to make the battery 6 chargeable and to continue the execution of the charge regenerative braking. It is set higher than VH1.
- regenerative braking is performed by the traveling MG3, and motoring regenerative braking is performed in which the regenerative electric power is used to motor the engine 1 by the power generation MG2.
- the traveling MG3 can generate a braking force equivalent to the engine brake.
- the motoring of the engine 1 can be performed as motoring regenerative braking during deceleration.
- the motoring regenerative braking is started, and the power generation MG2 drives the engine 1 by using the electric power regenerated by the traveling MG3. Therefore, the driving force of the power generation MG2 is increased and the rotation speed Ne is To rise.
- the torque Tq becomes a negative torque because the engine 1 is driven by the MG 2 for power generation.
- the GPF temperature T suppressed by the operation restriction performed between timing T4 and timing T5 is below the allowable GPF temperature TS. Therefore, even if the motoring regenerative braking is performed, the GPF 13 does not overheat.
- a series HEV mode that includes the engine 1, the MG 2 for power generation, and the MG 3 for travel, drives the MG 2 for power generation by the engine 1 to generate power, and drives the MG 3 for travel with the electric power generated by the MG 2 for power generation.
- the controller 20 implements the control method of the vehicle 100 that has the GPF 13 that collects PM in the exhaust gas of the engine 1.
- the control method of the vehicle 100 includes restricting the operation of the engine 1 based on the allowable GPF temperature TS corresponding to the PM accumulation amount S in the GPF 13.
- the operation limit of the engine 1 based on the allowable GPF temperature TS makes it possible to suppress the excessive temperature rise of the GPF 13 when burning PM by the motoring of the engine 1. Therefore, according to such a method, in the vehicle 100 having the series HEV mode, it becomes possible to suppress the deterioration of the GPF 13 due to the excessive temperature rise, and when the PM is burned by the motoring, the GPF temperature T It becomes possible to burn PM without considering the above.
- the control method of vehicle 100 further includes not performing the operation limitation when PM deposition amount S is equal to or less than first predetermined amount SL, and first predetermined amount SL includes PM deposition amount S and allowable GPF temperature TS.
- the allowable GPF temperature TS is a temperature corresponding to the maximum temperature of the exhaust gas temperature Tex of the engine 1, that is, the PM deposition amount S corresponding to the maximum GPF temperature Tmax.
- the controller 20 is further configured to perform forced motoring of the engine 1 and temperature increase control of the GPF 13 described below. Except for this point, the vehicle 100 is configured similarly to the case of the first embodiment.
- FIG. 9 is a diagram illustrating an operation mode of the engine 1 according to the PM accumulation amount S and the GPF temperature T.
- the region RM is a region where the forced motoring of the engine 1 in the first operation mode is executed. Forced motoring is motoring that is executed even when charging regenerative braking can be performed, and is performed as forced motoring regenerative braking during deceleration.
- the region RM is a region in which the PM deposition amount S is equal to or higher than the second predetermined amount Sb and the GPF temperature T is equal to or higher than the reproducible temperature TR of the GPF 13 (for example, 550 ° C.) and does not overlap with the regions R1 and R2.
- the second predetermined amount Sb is the PM deposition amount S corresponding to the case where the allowable GPF temperature TS is the maximum GPF temperature Tmax in the line SML, that is, the PM deposition amount S smaller than the first predetermined amount SL.
- the reproducible temperature TR is the lower limit value of the reproducible temperature of the GPF 13.
- the execution area of the forced motoring of the engine 1 is expanded to an area where the PM accumulation amount S is smaller than the first predetermined amount SL and the operation restriction of the engine 1 is unnecessary.
- the chances of burning PM by forced motoring and reducing the PM accumulation amount S increase, so that the state point PS is less likely to enter the region R2.
- the frequency of executing the operation restriction of the engine 1 is reduced.
- the second predetermined amount Sb is the PM deposition amount S that is smaller than the first predetermined amount SL by the predetermined value ⁇ . If the predetermined value ⁇ is too large, the PM deposition amount S is reduced by the forced motoring even if the PM deposition amount S is small, and the efficiency of reducing the PM deposition amount S by the forced motoring becomes poor. When the predetermined value ⁇ is too small, the PM accumulation amount S cannot be sufficiently reduced by the forced motoring, and the execution frequency of the operation restriction of the engine 1 cannot be sufficiently reduced. Therefore, the predetermined value ⁇ is set in advance from the viewpoint of the efficiency of reducing the PM accumulation amount S by the forced motoring and the frequency of executing the operation restriction of the engine 1.
- the area RG is an execution area of the temperature increase control of the GPF 13 which is the second operation mode.
- the temperature rise control of the GPF 13 is performed by changing the operating point PE of the engine 1 during the power generation operation to the operating point PE at which the exhaust temperature Tex becomes high. Therefore, the temperature increase control of the GPF 13 controls at least one of the fuel injection amount, the ignition timing, and the intake air amount of the engine 1 so that at least one of the rotation speed Ne and the torque Tq of the engine 1 during power generation is increased. It can be performed by controlling.
- the region RG is a region where the PM deposition amount S is equal to or higher than the first predetermined amount SL and the GPF temperature T is lower than the regenerable temperature TR, and does not overlap with the region R2. Since the region RG is below the regenerable temperature TR, even if the motoring of the engine 1 is executed, the PM accumulated in the GPF 13 cannot be burned. For this reason, in the region RG, the temperature rise control of the GPF 13 is executed to allow the high-temperature exhaust gas to flow through the GPF 13 to raise the temperature of the GPF 13.
- FIG. 10 is a flowchart showing an example of control performed by the controller 20 in the second embodiment.
- the controller 20 determines in step S21 whether the PM deposition amount S is equal to or more than the second predetermined amount Sb, in step S22 whether the PM deposition amount S is less than or equal to the first predetermined amount SL, and in step S23, the GPF temperature T is a reproducible temperature. It is determined whether or not it is equal to or more than TR. In steps S21 to S23, it is determined whether or not the state point PS is in a region in which the operation restriction of the engine 1 is unnecessary or a region R1 in the region RM that is the execution region of forced motoring.
- step S21 If a negative determination is made in step S21 or step S23, the state point PS is located in a region where the operation mode of the engine 1 is not particularly set. In this case, the process returns to step S21. If a positive determination is made in steps S21 to S23, the process proceeds to step S24.
- step S24 the controller 20 calculates the allowable GPF temperature TS. Further, in step S25, the controller 20 determines whether or not the GPF temperature T is equal to or lower than the allowable GPF temperature TS. If the affirmative determination is made in steps S21 to S23, the state point PS is in the region where the operation restriction is not required, and therefore the GPF temperature T does not exceed the allowable GPF temperature TS. Therefore, in this case, an affirmative decision is made in step S25, and the processing advances to step S26.
- step S26 the controller 20 determines whether forced motoring can be executed. Such a determination can be performed by determining whether or not the conditions for permitting forced motoring are satisfied.
- the conditions for permitting forced motoring include that the engine 1 is not performing a power generation operation and that the battery state quantity SOC is equal to or greater than a predetermined quantity SOC1.
- the predetermined amount SOC1 is a battery state amount SOC required for executing motoring, and can be set in advance. If a positive determination is made in step S26, the process proceeds to step S27.
- step S27 the controller 20 executes forced motoring. As a result, the PM deposited on the GPF 13 burns, and the PM deposition amount S decreases. After step S27, the process ends. Also in the case of a negative determination in step S26, the process ends once.
- step S22 When a negative determination is made in step S22, that is, when the PM deposition amount S is larger than the first predetermined amount SL, the process proceeds to step S29, and the controller 20 determines that the GPF temperature T is less than the reproducible temperature TR and the GPF temperature T is allowable. It is determined whether or not the temperature is equal to or lower than the GPF temperature TS. If a positive determination is made in step S29, the process proceeds to step S30.
- step S30 the controller 20 makes a temperature increase request for the GPF 13.
- the request to raise the temperature of the GPF 13 is a request to execute the temperature rise control of the GPF 13, and is made by turning on a flag, for example.
- step S31 the controller 20 determines whether or not the temperature raising control of the GPF 13 can be executed. Such a determination can be made by determining whether or not the engine 1 is in a power generating operation. When a negative determination is made in step S31, the process returns to step S29. In this case, the process from step S29 to step S31 is repeated until the battery state quantity SOC reaches the charging lower limit value VL of the battery 6 and the power generation operation of the engine 1 is started. If a positive determination is made in step S31, the process proceeds to step S32.
- step S32 the controller 20 changes the power generation operating point, that is, the operating point PE of the engine 1 during the power generating operation, to the operating point PE at which the exhaust temperature Tex becomes high. As a result, the temperature of the GPF 13 can be raised. After step S32, the process returns to step S29.
- step S29 When the temperature of the GPF 13 rises and the GPF temperature T becomes equal to or higher than the regenerable temperature TR, the PM accumulated on the GPF 13 can be combusted by the forced motoring. Therefore, if a negative determination is made in step S29, the process proceeds to step S25 described above, and if a positive determination is made in steps S25 and S26, forced motoring is executed.
- step S25 When the process proceeds to step S25 after the negative determination in step S29, the GPF temperature T may be higher than the allowable GPF temperature TS due to the change of the power generation operating point. In such a case, a negative determination is made in step S25, and the process proceeds to step S28.
- step S28 the controller 20 executes the operation restriction of the engine 1. As a result, the exhaust gas temperature Tex is suppressed and the GPF temperature T is suppressed, so that deterioration of the GPF 13 due to excessive temperature rise during motoring is suppressed. After step S28, the process returns to step S21.
- FIG. 11 is a diagram showing an example of a timing chart corresponding to the flowchart shown in FIG. In the following, mainly, different points from the timing chart shown in FIG. 8 described above will be described in detail.
- timing T1 to timing T3 The change from timing T1 to timing T3 is the same as the timing chart shown in FIG. 8 described above. That is, EV running is started at timing T1, steady running is started at timing T2, and power generation operation of the engine 1 is started at timing T3.
- the GPF temperature T is below the allowable GPF temperature TS. Therefore, the operation restriction of the engine 1 is not started at the timing T4.
- the PM deposition amount S exceeds the second predetermined amount Sb.
- the power generation operation is stopped based on the battery state quantity SOC. Further, deceleration is started at timing T6, and the output of traveling MG3 becomes a negative regenerative braking output at timing T7. Therefore, the charge regenerative braking can be started at the timing T7.
- the PM deposition amount S is smaller than the first predetermined amount SL and larger than the second predetermined amount Sb, and the PM deposition amount S exceeds the first predetermined amount SL. Then, there may be a case where the operation restriction of the engine 1 is necessary.
- the forced motoring regenerative braking is started at timing T7 even if the charging regenerative braking can be performed, and the driving force of the MG2 for power generation is increased due to the forced motoring of the engine 1.
- the rotation speed Ne becomes large and the torque Tq becomes a negative torque.
- the PM deposition amount S starts to decrease.
- the forced motoring regenerative braking can be continued until the PM accumulation amount S becomes smaller than the second predetermined amount Sb by a preset hysteresis amount Sh.
- the PM accumulation amount S is equal to or more than the second predetermined amount Sb
- regenerative braking is performed by the traveling MG3 and the regenerated electric power is used to motor the engine 1 by the power generation MG2.
- the second predetermined amount Sb is set to a PM deposition amount S smaller than the first predetermined amount SL, further including performing forced motoring regenerative braking, which is an example of the motoring regenerative braking.
- the motoring regenerative braking can be performed with the second predetermined amount Sb smaller than the first predetermined amount SL, and the PM accumulation amount S can be reduced. Therefore, it is possible to reduce the frequency with which the operation restriction of the engine 1 is performed due to the PM accumulation amount S that is larger than the first predetermined amount SL, and it is possible to reduce the situation in which the traveling performance is deteriorated due to the operation restriction.
- the method for controlling the vehicle 100 according to the present embodiment further includes performing regenerative braking by the traveling MG 3 and performing charge regenerative braking that charges the battery 6 with the regenerated electric power, and the forced motoring regenerative braking is the charge regenerative braking. Even if you can do it.
- the motoring regenerative braking is forcibly performed while the charge regenerative braking is performed, so that the operation limit of the engine 1 is restricted due to the PM accumulation amount S larger than the first predetermined amount SL.
- the frequency of being exposed can be greatly reduced.
- the forced motoring regenerative braking is further performed when the GPF temperature T is equal to or higher than the reproducible temperature TR.
- the forced motoring regenerative braking is performed in consideration of the GPF temperature T at which the GPF 13 can be regenerated, the fuel consumption is affected by performing the motoring when PM cannot be burned. Can be prevented.
- the control method of the vehicle 100 according to the present embodiment further includes changing the operating point PE of the engine 1 to an operating point PE at which the exhaust temperature Tex becomes high when the GPF temperature T is lower than the regenerable temperature TR.
- the GPF 13 can be quickly heated to make the GPF temperature T equal to or higher than the regenerable temperature TR, and thereby the PM accumulation amount S due to the forced motoring regenerative braking can be quickly reduced. ..
- the forced motoring regenerative braking is further performed when the battery state amount SOC is larger than the predetermined amount SOC1.
- limiting the operation of the engine 1 may include, for example, limiting the operation when the GPF temperature T is equal to or lower than the allowable GPF temperature TS, that is, when the state point PS is not located in the region R2. ..
- Such an operation restriction can be realized by, for example, restricting the operation when the GPF temperature T is higher than the allowable GPF temperature TS by a margin temperature lower by a preset margin.
- Such an operation limitation of the engine 1 is also included in the operation limitation of the engine 1 based on the allowable GPF temperature TS corresponding to the PM accumulation amount S.
- limiting the operation of the engine 1 based on the allowable GPF temperature TS is performed by regenerating the GPF 13 by a method other than motoring, including a known method, such as supplying secondary air to the GPF 13 to regenerate the GPF 13. May be applied when performing.
- a specific numerical value of the allowable GPF temperature TS corresponding to the PM accumulation amount S can be set to a value corresponding to the method of regenerating the GPF 13.
- control method of the vehicle 100 and the control device of the vehicle 100 are realized by the single controller 20 has been described.
- control method of the vehicle 100 and the control device of the vehicle 100 may be implemented by a plurality of controllers, for example.
- the allowable GPF temperature TS may not be used, and the control may be performed only by the PM deposition amount of the GPF 13.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- General Engineering & Computer Science (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Processes For Solid Components From Exhaust (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
エンジンと発電用モータジェネレータと走行用モータジェネレータとを備え、エンジンで発電用モータジェネレータを駆動して発電し、発電用モータジェネレータにより発電した電力で走行用モータジェネレータを駆動するシリーズハイブリッドモードを有するとともに、エンジンの排気中の粒子状物質を捕集するフィルタを備えるハイブリッド車両の制御方法であって、フィルタにおける粒子状物質の堆積量に基づき、エンジンの運転制限を行うことを含む。
Description
本発明は、ハイブリッド車両の制御に関する。
JP2015-202832A、JP2018-83570Aには、エンジンの排気中の粒子状物質すなわちPMを捕集するフィルタを備えるハイブリッド車両が開示されている。
ハイブリッド車両には、エンジンで発電用モータジェネレータを駆動して発電し、発電用モータジェネレータにより発電した電力で走行用モータジェネレータを駆動するシリーズハイブリッドモードを有するものがある。このような車両では例えば、発電用モータジェネレータでエンジンのモータリングを行い、高温のフィルタに空気を送り込むことにより、フィルタに堆積したPMを燃焼させてフィルタを再生することができる。
ところが、PMを燃焼させる際のフィルタのPM堆積量及び温度によっては、PMの燃焼によりフィルタが過昇温する結果、フィルタが劣化する虞がある。
本発明はこのような課題に鑑みてなされたもので、シリーズハイブリッドモードを有するハイブリッド車両において、過昇温によるフィルタの劣化を抑制することを目的とする。
本発明のある態様のハイブリッド車両の制御方法は、エンジンと発電用モータジェネレータと走行用モータジェネレータとを備え、エンジンで発電用モータジェネレータを駆動して発電し、発電用モータジェネレータにより発電した電力で走行用モータジェネレータを駆動するシリーズハイブリッドモードを有するとともに、エンジンの排気中の粒子状物質を捕集するフィルタを備えるハイブリッド車両の制御方法であって、フィルタにおける粒子状物質の堆積量に基づき、エンジンの運転制限を行うことを含む。
本発明の別の態様によれば、上記ハイブリッド車両の制御方法に対応するハイブリッド車両の制御装置が提供される。
以下、添付図面を参照しながら本発明の実施形態について説明する。
(第1実施形態)
図1はハイブリッド車両100の概略構成図である。図2は、エンジン1の排気系10の概略構成図である。図1に示すように、ハイブリッド車両100は、エンジン1と、発電用モータジェネレータ2と、走行用モータジェネレータ3と、第1インバータ4と、第2インバータ5と、バッテリ6と、ディファレンシャル機構7と、駆動輪8と、コントローラ20とを備える。以下では、ハイブリッド車両100を車両100と称し、モータジェネレータをMGと称す。
図1はハイブリッド車両100の概略構成図である。図2は、エンジン1の排気系10の概略構成図である。図1に示すように、ハイブリッド車両100は、エンジン1と、発電用モータジェネレータ2と、走行用モータジェネレータ3と、第1インバータ4と、第2インバータ5と、バッテリ6と、ディファレンシャル機構7と、駆動輪8と、コントローラ20とを備える。以下では、ハイブリッド車両100を車両100と称し、モータジェネレータをMGと称す。
エンジン1は、ガソリンエンジンとされ、発電用MG2に接続される。発電用MG2は、エンジン1により駆動されて発電する。走行用MG3は、ディファレンシャル機構7を介して駆動輪8と接続される。走行用MG3は、車両100の駆動を行う一方、減速時にはエネルギの回生を行う。
発電用MG2と走行用MG3とは、第1インバータ4、第2インバータ5及びバッテリ6等とともに高電圧の電圧回路9を形成する。第1インバータ4は発電用MG2の制御に用いられ、第2インバータ5は走行用MG3の制御に用いられる。第1インバータ4及び第2インバータ5それぞれは、コントローラ20からの指令に基づき三相交流を生成し、生成した三相交流を発電用MG2及び走行用MG3のうち対応するMGに印加する。第1インバータ4及び第2インバータ5は、統合されてもよい。バッテリ6は、発電用MG2及び走行用MG3の電力源を構成する。バッテリ6は、回生時に走行用MG3から供給される電力により充電される。バッテリ6は、発電用MG2から供給される電力により充電されてもよい。
図2に示すように、排気系10は、排気通路11と、触媒コンバータ12と、ガソリンパティキュレートフィルタ(以下、GPFと称す)13と、マフラー14とを備える。排気通路11は、エンジン1の排気を流通させる。触媒コンバータ12は、エンジン1の直後に設けられ、排気に含まれるHC、CO等の未燃成分の酸化や、NOx等の酸化成分の還元を行うことにより排気を浄化する。GPF13は、触媒コンバータ12の下流側に設けられ、エンジン1の排気中の粒子状物質すなわちPMを捕集する。GPF13は、触媒をさらに備えてもよい。マフラー14は、GPF13の下流に設けられ、排気音を低減する。
排気通路11には、GPF13の入口排気圧PinとGPF13の出口排気圧Poutとの差圧を検知する差圧センサ21が設けられる。GPF13のPM堆積量Sは、GPF13の入口排気圧Pinと出口排気圧Poutとの差圧に基づき推定できる。
GPF13の入口に接続する部分の排気通路11には、排気温Texを検知する排気温センサ23が、GPF13の出口に接続する部分の排気通路11には、GPF13の床温であるGPF温度Tを検出するためのGPF温度センサ24がさらに設けられる。GPF温度Tは、GPF温度センサ24からの出力信号に基づき、GPF13の温度の実温として検出することができる。
図1に戻り、コントローラ20は、中央演算装置(CPU)、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)及び入出力インタフェース(I/Oインタフェース)を備えた1又は複数のマイクロコンピュータで構成される。コントローラ20は、ROM又はRAMに格納されたプログラムをCPUによって実行することで、エンジン1、第1インバータ4、第2インバータ5等を統合的に制御する。
コントローラ20には、第1圧力センサ21、第2圧力センサ22、排気温センサ23、GPF温度センサ24のほか、車速VSPを検出するための車速センサ25、アクセル開度APOを検出するためのアクセル開度センサ26、ブレーキペダルの踏力BPFを検出するためのブレーキセンサ27、エンジン1の回転速度Neを検出するための回転速度センサ28、バッテリ6の充電状態を指標するバッテリ状態量SOCを検出するためのSOCセンサ29等、様々なセンサ・スイッチ類からの信号が入力される。これらの信号は、コントローラ20が行う制御に用いられる。
コントローラ20は、車両100の走行モードとして、EVモードとシリーズハイブリッドモード(以下、シリーズHEVモードと称す)とを有する。EVモードは、バッテリ6から供給される電力によって走行用MG3を駆動し、走行用MG3のみの駆動力によって走行するモードである。シリーズHEVモードは、エンジン1で発電用MG2を駆動して発電し、発電用MG2により発電した電力で走行用MG3を駆動するモードである。
コントローラ20は、アクセル開度APOと、ブレーキペダルの踏力BPFと、車速VSPに基づき、図示しない走行モード選択マップを参酌して走行モードを選択し、選択された走行モードが実現されるようエンジン1及び走行用MG3を駆動する。
ところで、車両100では、発電用MG2でエンジン1のモータリングを行い、高温のGPF13に空気を送り込むことにより、GPF13に堆積したPMを燃焼させてGPF13を再生することができる。
ところが、エンジン1をモータリングする際のGPF13のPM堆積量S及びGPF温度Tによっては、PMの燃焼によりGPF13が過昇温する結果、GPF13の劣化を招くことが懸念される。GPF13の劣化としては、GPF13の捕集機能や触媒機能の低下を招くことが懸念される。
このような事情に鑑み、本実施形態では以下で説明するようにしてGPF13の劣化を抑制する。
図3は、PM堆積量Sと許容GPF温度TSとの関係を説明する図である。
ラインSMLは、PM堆積量Sに応じた許容GPF温度TSを示す。換言すれば、ラインSMLは、PM堆積量Sと許容GPF温度TSとの関係を示す。許容GPF温度TSは、エンジン1のモータリングに応じたGPF温度Tの上限値であり、エンジン1のモータリングに応じたPMの燃焼によりGPF13が過昇温しないGPF温度Tの上限値として、PM堆積量Sに応じて設定される。ラインSMLからわかるように、許容GPF温度TSは、PM堆積量Sが大きくなるほど低下する。
最高GPF温度Tmaxは、エンジン1の排気温Texが最高温度の場合のGPF温度Tであり、GPF温度Tは通常、この最高GPF温度Tmaxを上回らない。このため、PM堆積量SとGPF温度Tとにより定まる状態点PSが、最高GPF温度Tmaxよりも高温側の領域R1に含まれることはない。
GPF温度Tが許容GPF温度TSを超えると、エンジン1のモータリングの際にGPF13に堆積したPMの燃焼により、GPF13が過昇温する結果、GPF13の劣化を招くことが懸念される。このため、ラインSMLよりも高温側の領域であって領域R1と重複しない領域である領域R2は、状態点PSの侵入を回避すべき回避領域となる。
第1所定量SLは、ラインSML上においてGPF温度Tが最高GPF温度Tmaxの場合に対応するPM堆積量Sである。換言すれば、第1所定量SLは、許容GPF温度TSが最高GPF温度Tmaxである場合、従って許容GPF温度TSがエンジン1の排気温Texの最高温度に対応する温度である場合のPM堆積量Sである。
PM堆積量Sが第1所定量SL以下であれば、GPF温度Tが許容GPF温度TSを超えることはない。このため、PM堆積量Sが第1所定量SL以下の場合は、エンジン1の運転制限を行う必要はない。
状態点PS1からわかるように、PM堆積量Sが堆積量S1の場合、堆積量S1に対応する許容GPF温度TSである許容GPF温度TS1は、ラインSMLに基づき定まる。この場合、GPF温度Tが許容GPF温度TS1を超えると、状態点PSが領域R2に侵入し、モータリングの際に過昇温によるGPF13の劣化が懸念される状態となる。このため本実施形態では、次に説明するようにエンジン1の運転制限を行う。
図4は、エンジン1の運転制限の説明図である。図4では、エンジン1の回転速度Ne及びトルクTqに応じた運転領域に許容GPF温度TS1の等温線、許容GPF温度TS1よりも低い温度Tmp1の等温線、及び温度Tmp1よりも低い温度Tmp2の等温線を示す。
図4には、動作点PE1において、エンジン1で発電用MG2を駆動して発電を行う発電運転を開始し、この際にエンジン1の動作点PEが動作点PE1から動作点PE2に変更された場合が示されている。動作点PE1は、PM堆積量Sが堆積量S1、GPF温度Tが温度Tmp2のときの動作点PEであり、動作点PE2は、許容GPF温度TS1の等温線よりも高温側の領域R3内の動作点PEである。
このためこの場合は、モータリングを行うと、GPF13に堆積したPMが許容GPF温度TS1を超える高温により急速に燃焼し、例えば1000℃を超える過昇温がGPF13に生じる結果、GPF13の劣化を招くことが懸念される。
そこで本実施形態では、回転速度Ne及びトルクTqに応じた動作点PEが動作点PE2になった場合に、エンジン1の運転領域が、領域R3よりも低温側の運転領域に制限される。これにより、エンジン1は、動作点PEが領域R3から外れるように運転制限される。このようにエンジン1の運転制限を行うことにより、PM堆積量Sに応じた許容GPF温度TSに基づくエンジン1の運転制限が行われる。
エンジン1の運転制限は具体的には、次のように行うことができる。
図5は、エンジン1の運転制限方法の第1の説明図である。排気温Tex1は、許容GPF温度TS1に対応する排気温Texを示す、二点破線は、エンジン1の等出力線を示す。図5では、エンジン1の音振性能を考慮しない場合を示す。排気温Tex及びエンジン1の出力は、ともに回転速度Ne及びトルクTqが高くなるほど、つまり図5において右上に行くほど高くなる。
運転制限をしながらエンジン1を運転するにあたっては、GPF温度Tが許容GPF温度TS1以下になることが望まれる。従って、排気温Texは、最高でも排気温Tex1に抑制する必要がある。その一方で、エンジン1を運転するにあたっては、極力高い効率が得られることが望まれる。
これらのことから、排気温Tex1の等温線上で最も出力が高くなる位置にエンジン1の上限動作点PEmaxを設定し、上限動作点PEmax以下の回転速度Ne及びトルクTqでエンジン1を運転すれば、運転制限をしながら効率良くエンジン1を運転することが可能になる。上限動作点PEmax1は、このようにして設定された上限動作点PEmaxであり、予め設定することができる。エンジン1の音振性能を考慮する場合、上限動作点PEmaxは、次のように設定することができる。
図6は、エンジン1の運転制限方法の第2の説明図である。領域RNVは、エンジン1の音振性能が基準に満たない領域を示す。この場合、上限動作点PEmaxは、領域RNVを避けて設定する必要がある。このため、上限動作点PEmaxは、領域RNV外において、排気温Tex1の等温線上で最も出力が高くなる位置に設定される。上限動作点PEmax2は、このように設定された上限動作点PEmaxであり、予め設定することができる。この場合、上限動作点PEmax2以下の回転速度Ne及びトルクTqでエンジン1を運転するにあたっても、領域RNVを避けたエンジン1の運転が行われる。
図7は、コントローラ20が行う制御の一例をフローチャートで示す図である。ステップS11で、コントローラ20は、PM堆積量Sが第1所定量SLよりも大きいか否かを判定する。ステップS11で否定判定であれば、処理は一旦終了する。すなわち、PM堆積量Sが第1所定量SL以下の場合、コントローラ20は、後述するステップS14において行われるエンジン1の運転制限を行わない。ステップS11で肯定判定であれば、処理はステップS12に進む。
ステップS12で、コントローラ20は、許容GPF温度TSを算出する。許容GPF温度TSは、現在のPM堆積量Sに対応する許容GPF温度TSをラインSMLから求めることにより、算出することができる。
ステップS13で、コントローラ20は、GPF温度Tが許容GPF温度TSよりも高いか否かを判定する。GPF温度Tが許容GPF温度TS以下であれば、エンジン1のモータリングの際に、過昇温によるGPF13の劣化を招くことはない。このため、ステップS13で否定判定であれば、処理は一旦終了する。
GPF温度Tが許容GPF温度TSよりも高い場合、エンジン1のモータリングの際に、過昇温によるGPF13の劣化を招くことが懸念される。このため、ステップS13で肯定判定であれば、処理はステップS14に進み、コントローラ20は、エンジン1の運転制限を実行する。エンジン1の運転制限は、エンジン1の運転領域を制限することにより行われる。
エンジン1の運転制限を行うことにより、運転制限を行わない場合と比較して排気温Texが抑制されGPF温度Tが抑制されるので、エンジン1のモータリングの際にGPF13が過昇温し、GPF13の劣化を招くことが抑制される。ステップS14の後には、処理は一旦終了する。
図8は、図7に示すフローチャートに対応するタイミングチャートの一例を示す図である。タイミングT1では、要求駆動力が上昇し始め、EVモードによるEV走行が開始される。このため、車速VSP、走行用MG3の出力が上昇し始め、バッテリ状態量SOCが低下し始める。タイミングT2では、要求駆動力が一定となり、車速VSP、走行用MG3の出力は一定になる。
タイミングT3では、バッテリ状態量SOCがバッテリ6の充電下限値VLになる。このため、エンジン1の発電運転が開始され、回転速度Ne、トルクTqが上昇するとともに、発電用MG2の発電量が増加する。タイミングT3では、排気温Tex及びGPF温度Tも上昇し始める。
タイミングT4では、GPF温度Tが許容GPF温度TSを上回る。このため、エンジン1の運転制限が実行され、回転速度Ne、トルクTqが低下するとともに、発電用MG2の発電量が低下する。
タイミングT5では、バッテリ状態量SOCが、バッテリ6の第1充電上限値VH1になり、エンジン1の発電運転が停止される。第1充電上限値VH1は、後述する充電回生制動を行わない場合のバッテリ6の充電上限値である。タイミングT5では、発電運転の停止に応じて、回転速度Ne、トルクTq、発電用MG2の発電量がゼロになり、バッテリ状態量SOCが低下し始める。タイミングT5では、エンジン1の発電運転が停止されることにより、エンジン1の運転制限も行われない状態になる。
タイミングT6では、車両100の減速が開始され、要求駆動力が低下し始めるとともに、車速VSP及び走行用MG3の出力が低下し始める。タイミングT6では、走行用MG3の回生が開始される結果、バッテリ状態量SOCは上昇し始める。
タイミングT7では、走行用MG3により回生制動を行いつつ回生した電力をバッテリ6に充電する充電回生制動が開始される。充電回生制動は、次のように開始される。すなわち、車両100の減速開始に応じてまず要求駆動力が次第に減少され、これに応じて走行用MG3の出力が次第に減少して予め設定された負の回生制動時出力になると、充電回生制動が開始される。充電回生制動は、次の理由で行われる。
すなわち、シリーズHEVモードを有する車両100では、エンジンブレーキが発生しない。このため、エンジンブレーキ相当の負の出力つまり制動力を走行用MG3に発生させるために、走行用MG3により回生制動を行いつつ回生した電力をバッテリ6に充電する充電回生制動が行われる。
タイミングT8では、要求駆動力がゼロになり、その後、予め設定された回生制動時駆動力になる。タイミングT8からは、車両が降坂路を走行するため要求駆動力がゼロ以下になり、走行用MG3により回生制動が行われるため、車速VSPは一定になる。
タイミングT9では、バッテリ状態量SOCが、バッテリ6の第2充電上限値VH2になる。第2充電上限値VH2は、充電回生制動を行う場合に設定されるバッテリ6の充電上限値であり、バッテリ6を充電可能にして充電回生制動の実行を継続させるために、第1充電上限値VH1よりも高く設定される。
タイミングT9で、バッテリ状態量SOCが第2充電上限値VH2になると、それ以上バッテリ6の充電を行うことができなくなる。この場合、充電回生制動の実行を継続することができなくなるので、充電回生制動により、走行用MG3でエンジンブレーキ相当の制動力を発生させることができなくなる。
このため、タイミングT9では、走行用MG3により回生制動を行い、回生された電力を用いて発電用MG2によりエンジン1をモータリングするモータリング回生制動が開始される。これにより、バッテリ状態量SOCが第2充電上限値VH2になっても、走行用MG3でエンジンブレーキ相当の制動力を発生させることが可能になる。このように、エンジン1のモータリングは、減速時にはモータリング回生制動として行うことができる。
タイミングT9では、モータリング回生制動を開始することにより、走行用MG3により回生された電力を用いて発電用MG2がエンジン1を駆動するので、発電用MG2の駆動力が大きくなり、回転速度Neは上昇する。トルクTqは、エンジン1が発電用MG2により駆動されることから、マイナストルクになる。
タイミングT9では、タイミングT4、タイミングT5間で行った運転制限により抑制されたGPF温度Tが、許容GPF温度TSを下回っている。このため、モータリング回生制動を行っても、GPF13が過昇温することはない。
次に、本実施形態の主な作用効果を説明する。
本実施形態では、エンジン1と発電用MG2と走行用MG3とを備え、エンジン1で発電用MG2を駆動して発電し、発電用MG2により発電した電力で走行用MG3を駆動するシリーズHEVモードを有するとともに、エンジン1の排気中のPMを捕集するGPF13を備える車両100の制御方法が、コントローラ20により実現される。車両100の制御方法は、GPF13におけるPM堆積量Sに応じた許容GPF温度TSに基づき、エンジン1の運転制限を行うことを含む。
このような方法によれば、許容GPF温度TSに基づくエンジン1の運転制限により、エンジン1のモータリングによりPMを燃焼させる際のGPF13の過昇温を抑制可能になる。このためこのような方法によれば、シリーズHEVモードを有する車両100において、過昇温によるGPF13の劣化を抑制することが可能になり、また、モータリングによりPMを燃焼させる際に、GPF温度Tを考慮せずにPMを燃焼させることが可能になる。
車両100の制御方法は、PM堆積量Sが第1所定量SL以下の場合は、運転制限を行わないことをさらに含み、第1所定量SLは、PM堆積量Sと許容GPF温度TSとの関係において、許容GPF温度TSがエンジン1の排気温Texの最高温度に応じた温度、つまり最高GPF温度Tmaxである場合に対応するPM堆積量Sとされる。
このような方法によれば、運転制限が不要な領域では運転制限をせずに、PM堆積量Sに応じたモータリング制御を行うことが可能になる。
(第2実施形態)
本実施形態では、コントローラ20はさらに、以下で説明するエンジン1の強制モータリング及びGPF13の昇温制御を行うように構成される。この点以外、車両100は、第1実施形態の場合と同様に構成される。
本実施形態では、コントローラ20はさらに、以下で説明するエンジン1の強制モータリング及びGPF13の昇温制御を行うように構成される。この点以外、車両100は、第1実施形態の場合と同様に構成される。
図9は、PM堆積量S及びGPF温度Tに応じたエンジン1の運転モードを説明する図である。領域RMは、第1運転モードであるエンジン1の強制モータリングの実行領域である。強制モータリングは、充電回生制動を行える場合であっても実行されるモータリングであり、減速時に強制モータリング回生制動として行われる。
領域RMは、PM堆積量Sが第2所定量Sb以上且つGPF温度TがGPF13の再生可能温度TR(例えば、550℃)以上の領域であって、領域R1及び領域R2と重複しない領域とされる。第2所定量Sbは、ラインSMLにおいて許容GPF温度TSが最高GPF温度Tmaxの場合に対応するPM堆積量S、つまり第1所定量SLよりも小さいPM堆積量Sとされる。再生可能温度TRは、GPF13の再生可能温度の下限値とされる。
図9からわかるように、エンジン1の強制モータリングの実行領域は、PM堆積量Sが第1所定量SLよりも小さく、エンジン1の運転制限が不要となる領域に拡大される。これにより、強制モータリングによりPMを燃焼させ、PM堆積量Sを減少させる機会が増加するので、その分、状態点PSが領域R2に侵入し難くなる。結果、エンジン1の運転制限の実行頻度が低減される。
第2所定量Sbは、第1所定量SLよりも所定値αだけ小さいPM堆積量Sとされる。所定値αが大き過ぎる場合、PM堆積量Sが少量でも強制モータリングによりPM堆積量Sが減少されることになり、強制モータリングによるPM堆積量Sの低減効率が悪くなる。所定値αが小さ過ぎる場合、強制モータリングによりPM堆積量Sを十分に減少させることができずに、エンジン1の運転制限の実行頻度を十分に低減できなくなる。このため、所定値αは、強制モータリングによるPM堆積量Sの低減効率とエンジン1の運転制限の実行頻度の観点から予め設定される。
領域RGは、第2の運転モードであるGPF13の昇温制御の実行領域である。GPF13の昇温制御は、発電運転中のエンジン1の動作点PEを排気温Texが高くなる動作点PEに変更することにより行われる。従って、GPF13の昇温制御は、発電中のエンジン1の回転速度Ne及びトルクTqのうち少なくともいずれかが高まるように、エンジン1の燃料噴射量、点火時期及び吸入空気量のうち少なくともいずれかを制御することにより行うことができる。
領域RGは、PM堆積量Sが第1所定量SL以上且つGPF温度Tが再生可能温度TR未満の領域であって、領域R2と重複しない領域とされる。領域RGは、再生可能温度TR未満の領域なので、エンジン1のモータリングを実行しても、GPF13に堆積したPMを燃焼させることができない。このため、領域RGでは、GPF13の昇温制御を実行することにより、高温の排気をGPF13に流通させて、GPF13の昇温を図る。
図10は、第2実施形態でコントローラ20が行う制御の一例をフローチャートで示す図である。コントローラ20は、ステップS21でPM堆積量Sが第2所定量Sb以上か否か、ステップS22でPM堆積量Sが第1所定量SL以下か否か、ステップS23でGPF温度Tが再生可能温度TR以上か否かをそれぞれ判定する。ステップS21からステップS23では、状態点PSが、強制モータリングの実行領域である領域RMのうちエンジン1の運転制限が不要な領域、又は領域R1にあるか否かが判定される。
ステップS21又はステップS23で否定判定であった場合、状態点PSは、エンジン1の運転モードが特段設定されていない領域に位置することになる。この場合、処理はステップS21に戻る。ステップS21からステップS23で肯定判定であった場合、処理はステップS24に進む。
ステップS24で、コントローラ20は、許容GPF温度TSを算出する。また、ステップS25で、コントローラ20は、GPF温度Tが許容GPF温度TS以下か否かを判定する。ステップS21からステップS23で肯定判定であった場合、状態点PSは運転制限不要な領域にあるので、GPF温度Tが許容GPF温度TSを超えることはない。このためこの場合は、ステップS25で肯定判定され、処理はステップS26に進む。
ステップS26で、コントローラ20は、強制モータリングを実行可能か否かの判定を行う。このような判定は、強制モータリングの許可条件が成立しているか否かを判定することにより行うことができる。強制モータリングの許可条件は、エンジン1が発電運転を行っていないこと、バッテリ状態量SOCが所定量SOC1以上であることを含む。所定量SOC1は、モータリングを実行するために必要とされるバッテリ状態量SOCであり、予め設定することができる。ステップS26で肯定判定であれば、処理はステップS27に進む。
ステップS27で、コントローラ20は強制モータリングを実行する。これにより、GPF13に堆積したPMが燃焼し、PM堆積量Sが減少する。ステップS27の後には、処理は一旦終了する。ステップS26で否定判定の場合も、処理は一旦終了する。
ステップS22で否定判定の場合、つまりPM堆積量Sが第1所定量SLより大きい場合、処理はステップS29に進み、コントローラ20は、GPF温度Tが再生可能温度TR未満、且つGPF温度Tが許容GPF温度TS以下か否かを判定する。ステップS29で肯定判定であれば、処理はステップS30に進む。
ステップS30で、コントローラ20はGPF13の昇温要求を行う。GPF13の昇温要求は、GPF13の昇温制御の実行要求であり、例えばフラグをONにすることにより行われる。
ステップS31で、コントローラ20は、GPF13の昇温制御が実行可能か否かを判定する。このような判定は、エンジン1が発電運転中か否かを判定することにより行うことができる。ステップS31で否定判定の場合、処理はステップS29に戻る。この場合、バッテリ状態量SOCがバッテリ6の充電下限値VLになり、エンジン1の発電運転が開始されるまでの間、ステップS29からステップS31の処理が繰り返される。ステップS31で肯定判定の場合、処理はステップS32に進む。
ステップS32で、コントローラ20は、発電運転点つまり発電運転中のエンジン1の動作点PEを排気温Texが高くなる動作点PEに変更する。これにより、GPF13の昇温が図られる。ステップS32の後には、処理はステップS29に戻る。
GPF13が昇温し、GPF温度Tが再生可能温度TR以上になった場合には、GPF13に堆積したPMを強制モータリングにより燃焼させることが可能になる。このため、ステップS29で否定判定であれば、処理は前述したステップS25に進み、さらにステップS25、ステップS26で肯定判定されると、強制モータリングが実行される。
ステップS29の否定判定を経てステップS25に処理が進んだ場合、発電運転点の変更により、GPF温度Tが許容GPF温度TSよりも高くなる場合がある。このような場合には、ステップS25で否定判定され、処理はステップS28に進む。
ステップS28で、コントローラ20は、エンジン1の運転制限を実行する。これにより、排気温Texが抑制されGPF温度Tが抑制されるので、モータリングの際に、過昇温によるGPF13の劣化を招くことが抑制される。ステップS28の後には、処理はステップS21に戻る。
図11は、図10に示すフローチャートに対応するタイミングチャートの一例を示す図である。以下では、主に前述した図8に示すタイミングチャートと異なる部分について、詳しく説明する。
タイミングT1からタイミングT3までの変化は、前述した図8に示すタイミングチャートと同様である。すなわち、タイミングT1でEV走行が開始され、タイミングT2で定常走行となり、タイミングT3でエンジン1の発電運転が開始される。
この例では、タイミングT4で、GPF温度Tが許容GPF温度TS以下になっている。このため、タイミングT4でエンジン1の運転制限は開始されない。この例では、タイミングT4で、PM堆積量Sが第2所定量Sbを上回る。
タイミングT5では、バッテリ状態量SOCに基づき発電運転が停止される。また、タイミングT6で減速が開始され、タイミングT7で、走行用MG3の出力が負の回生制動時出力になる。このため、タイミングT7では充電回生制動を開始することができる。
その一方でこの例では、タイミングT7で、PM堆積量Sが第1所定量SLよりも小さく、且つ第2所定量Sbよりも大きくなっており、PM堆積量Sが第1所定量SLを超えると、エンジン1の運転制限が必要な場合が生じることになる。
このためこの例では、タイミングT7において、充電回生制動を行える場合であっても、強制モータリング回生制動が開始され、エンジン1の強制モータリングのために発電用MG2の駆動力が増加される。結果、回転速度Neは大きくなり、トルクTqはマイナストルクになる。また、PM堆積量Sは減少し始める。強制モータリング回生制動は、PM堆積量Sが、第2所定量Sbよりも予め設定したヒステリシス量Shの分、小さくなるまで継続することができる。
次に、本実施形態の主な作用効果について説明する。
本実施形態にかかる車両100の制御方法は、PM堆積量Sが第2所定量Sb以上の場合は、走行用MG3により回生制動を行い回生した電力を用いて発電用MG2によりエンジン1をモータリングするモータリング回生制動の一例である強制モータリング回生制動を行うことをさらに含み、第2所定量Sbは、第1所定量SLよりも小さいPM堆積量Sとされる。
このような方法によれば、第1所定量SLよりも小さい第2所定量Sbでモータリング回生制動を行い、PM堆積量Sを減少させることができる。このため、第1所定量SLよりも大きいPM堆積量Sに起因してエンジン1の運転制限が行われる頻度を低減でき、運転制限により走行性能が低下してしまう事態を減少させることができる。
本実施形態にかかる車両100の制御方法は、走行用MG3により回生制動を行いつつ回生した電力をバッテリ6に充電する充電回生制動を行うことをさらに含み、強制モータリング回生制動は、充電回生制動を行える場合であっても行われる。
このような方法によれば、充電回生制動を行えるうちから強制的にモータリング回生制動を行うことにより、第1所定量SLよりも大きいPM堆積量Sに起因してエンジン1の運転制限が行われる頻度を大きく低減することができる。
本実施形態では、強制モータリング回生制動を行うにあたっては、さらにGPF温度Tが再生可能温度TR以上である場合に強制モータリング回生制動を行う。
このような方法によれば、GPF13を再生可能なGPF温度Tを考慮して強制モータリング回生制動を行うので、PMを燃焼させることができない場合にモータリングを行うことにより、燃費が影響を受けることを防止できる。
本実施形態にかかる車両100の制御方法は、GPF温度Tが再生可能温度TRよりも低い場合は、エンジン1の動作点PEを排気温Texが高くなる動作点PEに変更することをさらに含む。
このような方法によれば、GPF13を素早く昇温させてGPF温度Tを再生可能温度TR以上にすることができ、これにより強制モータリング回生制動によるPM堆積量Sの早期減少を図ることができる。
本実施形態では、強制モータリング回生制動を行うにあたっては、さらにバッテリ状態量SOCが所定量SOC1よりも大きい場合に強制モータリング回生制動を行う。
このような方法によれば、強制モータリング回生制動の実行中にバッテリ状態量SOCの不足により、不意に強制モータリング回生制動を実行できなくなる事態を防止することができる。
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例の一部を示したに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。
上述した実施形態では、GPF温度Tが許容GPF温度TSよりも高い場合に、エンジン1の運転制限を行う場合について説明した。しかしながら、エンジン1の運転制限を行うことには例えば、GPF温度Tが許容GPF温度TS以下の場合、つまり状態点PSが領域R2に位置しないときに、運転制限を行うことが含まれてもよい。
このような運転制限は例えば、GPF温度Tが許容GPF温度TSよりも予め設定した余裕代の分低い余裕温度より高い場合に運転制限を行うことにより、実現することができる。このようなエンジン1の運転制限も、PM堆積量Sに応じた許容GPF温度TSに基づくエンジン1の運転制限に含まれる。
上述した実施形態では、エンジン1のモータリングによりGPF13の再生を行う場合において、許容GPF温度TSに基づくエンジン1の運転制限を行う場合について説明した。これは、エンジン1のモータリングによりGPF13の再生を行う場合、モータリングによりGPF13に空気を流通させるので、GPF13に堆積したPMが急速に燃焼する結果、PM堆積量S及びGPF温度Tによっては、GPF13が過昇温する蓋然性が高いためである。
しかしながら、許容GPF温度TSに基づくエンジン1の運転制限を行うことは、例えば二次空気をGPF13に供給してGPF13を再生するなど、公知の方法を含むモータリング以外の他の方法によりGPF13の再生を行う場合に適用されてもよい。この場合、PM堆積量Sに応じた許容GPF温度TSの具体的数値をGPF13の再生方法に応じた値に設定することができる。
上述した実施形態では、車両100の制御方法及び車両100の制御装置が、単一のコントローラ20により実現される場合について説明した。しかしながら、車両100の制御方法及び車両100の制御装置は例えば、複数のコントローラで実現されてもよい。また、許容GPF温度TSを使わず、GPF13のPM堆積量のみで制御しても構わない。
Claims (8)
- エンジンと発電用モータジェネレータと走行用モータジェネレータとを備え、前記エンジンで前記発電用モータジェネレータを駆動して発電し、前記発電用モータジェネレータにより発電した電力で前記走行用モータジェネレータを駆動するシリーズハイブリッドモードを有するとともに、前記エンジンの排気中の粒子状物質を捕集するフィルタを備えるハイブリッド車両の制御方法であって、
前記フィルタにおける前記粒子状物質の堆積量に基づき、前記エンジンの運転制限を行うことを含むハイブリッド車両の制御方法。 - 請求項1に記載のハイブリッド車両の制御方法であって、
前記堆積量が第1所定量以下の場合は、前記運転制限を行わないことをさらに含み、
前記第1所定量は、前記堆積量と前記フィルタの許容温度との関係において、前記フィルタの許容温度が前記エンジンの最高排気温に応じた温度である場合に対応する堆積量であるハイブリッド車両の制御方法。 - 請求項2に記載のハイブリッド車両の制御方法であって、
前記堆積量が第2所定量以上の場合は、前記走行用モータジェネレータにより回生制動を行い回生した電力を用いて前記発電用モータジェネレータにより前記エンジンをモータリングするモータリング回生制動を行うことをさらに含み、
前記第2所定量を前記第1所定量よりも小さい堆積量とするハイブリッド車両の制御方法。 - 請求項3に記載のハイブリッド車両の制御方法であって、
前記走行用モータジェネレータにより回生制動を行いつつ回生した電力をバッテリに充電する充電回生制動を行うことをさらに含み、
前記モータリング回生制動を行うにあたっては、前記充電回生制動を行える場合であっても、前記モータリング回生制動を行うハイブリッド車両の制御方法。 - 請求項3又は4に記載のハイブリッド車両の制御方法であって、
前記モータリング回生制動を行うにあたっては、さらに前記フィルタの温度が前記フィルタの再生可能温度以上である場合に前記モータリング回生制動を行うハイブリッド車両の制御方法。 - 請求項3から5いずれか1項に記載のハイブリッド車両の制御方法であって、
前記モータリング回生制動を行うにあたっては、さらにバッテリの充電状態を指標するバッテリ状態量が所定量よりも大きい場合に前記モータリング回生制動を行うハイブリッド車両の制御方法。 - 請求項2から6いずれか1項に記載のハイブリッド車両の制御方法であって、
前記フィルタの温度が前記フィルタの再生可能温度より低い場合は前記エンジンの動作点を排気温が高くなる動作点に変更することをさらに含むハイブリッド車両の制御方法。 - エンジンと発電用モータジェネレータと走行用モータジェネレータとを備え、前記エンジンで前記発電用モータジェネレータを駆動して発電し、前記発電用モータジェネレータにより発電した電力で前記走行用モータジェネレータを駆動するシリーズハイブリッドモードを有するとともに、前記エンジンの排気中の粒子状物質を捕集するフィルタを備えるハイブリッド車両の制御装置であって、
前記フィルタにおける前記粒子状物質の堆積量に基づき、前記エンジンの運転制限を行うコントローラを備えるハイブリッド車両の制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201880098657.2A CN112888609B (zh) | 2018-11-08 | 2018-11-08 | 混合动力车辆的控制方法以及混合动力车辆的控制装置 |
| EP18939128.7A EP3878705B1 (en) | 2018-11-08 | 2018-11-08 | Control method for hybrid vehicle and control device for hybrid vehicle |
| PCT/JP2018/041521 WO2020095416A1 (ja) | 2018-11-08 | 2018-11-08 | ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 |
| US17/292,099 US20210402978A1 (en) | 2018-11-08 | 2018-11-08 | Control method of hybrid vehicle and control device of hybrid vehicle |
| JP2020556431A JP7124883B2 (ja) | 2018-11-08 | 2018-11-08 | ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/041521 WO2020095416A1 (ja) | 2018-11-08 | 2018-11-08 | ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020095416A1 true WO2020095416A1 (ja) | 2020-05-14 |
Family
ID=70611856
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/041521 WO2020095416A1 (ja) | 2018-11-08 | 2018-11-08 | ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210402978A1 (ja) |
| EP (1) | EP3878705B1 (ja) |
| JP (1) | JP7124883B2 (ja) |
| CN (1) | CN112888609B (ja) |
| WO (1) | WO2020095416A1 (ja) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002285823A (ja) * | 2001-03-27 | 2002-10-03 | Nissan Motor Co Ltd | 内燃機関の排気浄化装置 |
| JP2010001860A (ja) * | 2008-06-23 | 2010-01-07 | Denso Corp | 内燃機関の排気浄化装置 |
| JP2010242639A (ja) * | 2009-04-07 | 2010-10-28 | Honda Motor Co Ltd | 内燃機関の制御装置 |
| JP2011085092A (ja) * | 2009-10-16 | 2011-04-28 | Mitsubishi Fuso Truck & Bus Corp | シリーズハイブリッド車のdpf再生装置 |
| JP2014227009A (ja) * | 2013-05-21 | 2014-12-08 | いすゞ自動車株式会社 | ハイブリッド車両及びその制御方法 |
| JP2015140150A (ja) * | 2014-01-30 | 2015-08-03 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP2015202832A (ja) | 2014-04-16 | 2015-11-16 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP2018083570A (ja) | 2016-11-25 | 2018-05-31 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP2018134988A (ja) * | 2017-02-22 | 2018-08-30 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4321767A1 (de) * | 1993-06-30 | 1995-01-12 | Linde Ag | Verfahren zum Betreiben eines Flurförderzeugs |
| JP4396600B2 (ja) * | 2005-08-23 | 2010-01-13 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| US7748214B2 (en) * | 2006-03-03 | 2010-07-06 | Nissan Motor Co., Ltd. | Exhaust gas purification system for hybrid vehicle |
| WO2014042007A1 (ja) * | 2012-09-11 | 2014-03-20 | 本田技研工業株式会社 | ハイブリッド車両 |
| JP6070591B2 (ja) * | 2014-01-28 | 2017-02-01 | トヨタ自動車株式会社 | ハイブリッド車両およびハイブリッド車両の制御方法 |
| DE102014220860B4 (de) * | 2014-10-15 | 2018-10-04 | Volkswagen Aktiengesellschaft | Verfahren zum Betreiben eines Hybridfahrzeugs und Hybridfahrzeug |
| JP6255137B2 (ja) * | 2015-03-13 | 2017-12-27 | 日立建機株式会社 | ハイブリッド建設機械の制御装置 |
| JP2017136935A (ja) * | 2016-02-03 | 2017-08-10 | いすゞ自動車株式会社 | ハイブリッド車両及びその制御方法 |
| JP2018062199A (ja) * | 2016-10-11 | 2018-04-19 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6673139B2 (ja) * | 2016-10-19 | 2020-03-25 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6468298B2 (ja) * | 2017-01-30 | 2019-02-13 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| KR102383250B1 (ko) * | 2017-10-25 | 2022-04-05 | 현대자동차 주식회사 | 차량 시스템 및 이를 이용하여 매연 필터를 가열하는 방법 |
| JP6900929B2 (ja) * | 2018-04-11 | 2021-07-14 | トヨタ自動車株式会社 | 車両 |
| US10895182B2 (en) * | 2018-05-09 | 2021-01-19 | Ford Global Technologies, Llc | Method and system for particulate filter regeneration |
| JP7103171B2 (ja) * | 2018-11-05 | 2022-07-20 | トヨタ自動車株式会社 | ハイブリッド自動車 |
-
2018
- 2018-11-08 US US17/292,099 patent/US20210402978A1/en active Pending
- 2018-11-08 JP JP2020556431A patent/JP7124883B2/ja active Active
- 2018-11-08 WO PCT/JP2018/041521 patent/WO2020095416A1/ja unknown
- 2018-11-08 CN CN201880098657.2A patent/CN112888609B/zh active Active
- 2018-11-08 EP EP18939128.7A patent/EP3878705B1/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002285823A (ja) * | 2001-03-27 | 2002-10-03 | Nissan Motor Co Ltd | 内燃機関の排気浄化装置 |
| JP2010001860A (ja) * | 2008-06-23 | 2010-01-07 | Denso Corp | 内燃機関の排気浄化装置 |
| JP2010242639A (ja) * | 2009-04-07 | 2010-10-28 | Honda Motor Co Ltd | 内燃機関の制御装置 |
| JP2011085092A (ja) * | 2009-10-16 | 2011-04-28 | Mitsubishi Fuso Truck & Bus Corp | シリーズハイブリッド車のdpf再生装置 |
| JP2014227009A (ja) * | 2013-05-21 | 2014-12-08 | いすゞ自動車株式会社 | ハイブリッド車両及びその制御方法 |
| JP2015140150A (ja) * | 2014-01-30 | 2015-08-03 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP2015202832A (ja) | 2014-04-16 | 2015-11-16 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP2018083570A (ja) | 2016-11-25 | 2018-05-31 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP2018134988A (ja) * | 2017-02-22 | 2018-08-30 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3878705A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2020095416A1 (ja) | 2021-11-25 |
| JP7124883B2 (ja) | 2022-08-24 |
| CN112888609A (zh) | 2021-06-01 |
| US20210402978A1 (en) | 2021-12-30 |
| CN112888609B (zh) | 2024-05-10 |
| EP3878705A4 (en) | 2021-10-20 |
| EP3878705A1 (en) | 2021-09-15 |
| EP3878705B1 (en) | 2023-05-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6673139B2 (ja) | ハイブリッド自動車 | |
| CN108223063B (zh) | 混合动力车辆 | |
| CN108437970B (zh) | 混合动力车辆 | |
| KR101773734B1 (ko) | 하이브리드 차량 및 하이브리드 차량용 제어 방법 | |
| JP2018167618A (ja) | 自動車 | |
| JP2015140150A (ja) | ハイブリッド車両 | |
| JP5808997B2 (ja) | ハイブリッド自動車の制御装置 | |
| JP7103169B2 (ja) | ハイブリッド自動車 | |
| KR20170025877A (ko) | 하이브리드 차량의 제어 장치 및 방법 | |
| JP2018062199A (ja) | ハイブリッド自動車 | |
| JP2020083002A (ja) | ハイブリッド自動車 | |
| JP7103171B2 (ja) | ハイブリッド自動車 | |
| JP6149510B2 (ja) | ハイブリッド車両及びその制御方法 | |
| JP2008094238A (ja) | ハイブリッド車の制御装置 | |
| JP2020111164A (ja) | ハイブリッド自動車 | |
| JP7124883B2 (ja) | ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 | |
| WO2020080063A1 (ja) | ハイブリッドシステム、ハイブリッドシステムの制御装置、および、ハイブリッドシステムの制御方法 | |
| JP7568123B2 (ja) | 車両の制御方法及び車両 | |
| JP7087454B2 (ja) | ハイブリッド自動車 | |
| JP2017132299A (ja) | ハイブリッド自動車 | |
| WO2021019618A1 (ja) | ハイブリッド車両の制御方法及びハイブリッド車両の制御装置 | |
| JP2020131872A (ja) | ハイブリッド自動車 | |
| JP2020082884A (ja) | ハイブリッド自動車 | |
| JP2020142695A (ja) | 車両の制御装置 | |
| JP2020111166A (ja) | ハイブリッド自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18939128 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020556431 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018939128 Country of ref document: EP Effective date: 20210608 |