WO2019087904A1 - 手術アームシステム及び手術アーム制御システム - Google Patents
手術アームシステム及び手術アーム制御システム Download PDFInfo
- Publication number
- WO2019087904A1 WO2019087904A1 PCT/JP2018/039539 JP2018039539W WO2019087904A1 WO 2019087904 A1 WO2019087904 A1 WO 2019087904A1 JP 2018039539 W JP2018039539 W JP 2018039539W WO 2019087904 A1 WO2019087904 A1 WO 2019087904A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- oblique
- endoscope
- arm
- unit
- control
- Prior art date
Links
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00149—Holding or positioning arrangements using articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00006—Operational features of endoscopes characterised by electronic signal processing of control signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/0016—Holding or positioning arrangements using motor drive units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00174—Optical arrangements characterised by the viewing angles
- A61B1/00179—Optical arrangements characterised by the viewing angles for off-axis viewing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/24—Base structure
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/36—Microscopes arranged for photographic purposes or projection purposes or digital imaging or video purposes including associated control and data processing arrangements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
Definitions
- the present disclosure relates to a control device for a oblique endoscope and a medical system.
- a plurality of articulated parts are rotatably connected by a plurality of links, and an articulated arm capable of supporting the oblique endoscope at its tip, and the articulated joint to change the position and posture of the oblique endoscope.
- a control system for controlling an arm wherein the control system controls a rotational speed or a moving speed of the oblique endoscope based on a position of the observation object in the visual field within the visual field imaged through the oblique endoscope.
- a surgical arm system is provided that controls at least one of the following.
- a plurality of joint portions are rotatably connected by a plurality of links, and an articulated arm capable of supporting the oblique endoscope at its tip is controlled to change the position and attitude of the oblique endoscope.
- a surgical arm control system for controlling the articulated arm, wherein the rotational speed or the moving speed of the oblique endoscope is based on the position of the observation object in the visual field within the visual field imaged through the oblique endoscope.
- a surgical arm control system is provided that controls at least one of:
- the present disclosure it is possible to prevent the observation object from being lost in the visual field of the monitor image.
- the above-mentioned effects are not necessarily limited, and, along with or in place of the above-mentioned effects, any of the effects shown in the present specification, or other effects that can be grasped from the present specification May be played.
- FIG. 2 is a schematic view showing an appearance of a perspective endoscope 100. It is a schematic diagram which shows a mode that the visual field 200 changes with oblique-view rotation. It is a schematic diagram which shows a mode that the visual field projected on a monitor changes with oblique vision rotation.
- FIG. 2 is a schematic view showing an appearance of a perspective endoscope 100. It is a schematic diagram which shows a mode that the visual field 200 changes with oblique-view rotation. It is a schematic diagram which shows a mode that the visual field projected on a monitor changes with oblique vision rotation.
- FIG. 7 is a schematic view showing a method of calculating the distance from the center of the visual field 200 to the observation object 210. It is a schematic diagram which shows the example of the map which prescribes
- FIG. 7 is a schematic view showing an example of rotation around a constraining point 300. It is a figure for demonstrating control of the arm which moves an observation target object to the screen center. It is a figure for demonstrating control of the arm which moves an observation target object to the screen center. It is a figure for demonstrating the outline
- FIG. 6 is a schematic view showing a configuration in which a holding unit is provided at the tip of the arm section to independently control the rotation of the oblique endoscope and the rotation of the camera head in the configuration example shown in FIG.
- FIG. 23 is a schematic view showing a configuration of a support arm device including an arm unit and a control device, an endoscope unit, and a CCU in the configuration example shown in FIG. 22.
- FIG. 24 is a sequence diagram showing a flow of processing in the configuration shown in FIGS. 22 and 23;
- FIG. 1 is a diagram showing an example of a schematic configuration of an endoscopic surgery system 5000 to which the technology according to the present disclosure can be applied.
- an operator (doctor) 5067 is illustrated operating a patient 5071 on a patient bed 5069 using the endoscopic surgery system 5000.
- the endoscopic surgery system 5000 includes an endoscope 5001, other surgical instruments 5017, a support arm device 5027 for supporting the endoscope 5001, and various devices for endoscopic surgery. And a cart 5037 on which the
- trockers 5025a to 5025d are punctured in the abdominal wall. Then, the barrel 5003 of the endoscope 5001 and other surgical tools 5017 are inserted into the body cavity of the patient 5071 from the trocars 5025 a to 5025 d.
- an insufflation tube 5019, an energy treatment instrument 5021 and a forceps 5023 are inserted into the body cavity of the patient 5071 as the other surgical instruments 5017.
- the energy treatment tool 5021 is a treatment tool that performs incision and peeling of tissue, sealing of a blood vessel, or the like by high-frequency current or ultrasonic vibration.
- the illustrated surgical tool 5017 is merely an example, and various surgical tools generally used in endoscopic surgery, such as forceps and retractors, may be used as the surgical tool 5017, for example.
- An image of a surgical site in a body cavity of a patient 5071 captured by the endoscope 5001 is displayed on the display device 5041.
- the operator 5067 performs a treatment such as excision of the affected area using the energy treatment tool 5021 and the forceps 5023 while viewing the image of the operative part displayed on the display device 5041 in real time.
- a treatment such as excision of the affected area using the energy treatment tool 5021 and the forceps 5023
- the insufflation tube 5019, the energy treatment instrument 5021 and the forceps 5023 are supported by the operator 5067 or an assistant during the operation.
- the support arm device 5027 includes an arm portion 5031 extending from the base portion 5029.
- the arm unit 5031 includes joints 5033 a, 5033 b, 5033 c, and links 5035 a, 5035 b, and is driven by control from the arm control device 5045.
- the endoscope 5001 is supported by the arm unit 5031 and the position and posture thereof are controlled. In this way, stable position fixation of the endoscope 5001 can be realized.
- the endoscope 5001 includes a lens barrel 5003 whose region of a predetermined length from the tip is inserted into a body cavity of a patient 5071 and a camera head 5005 connected to the proximal end of the lens barrel 5003.
- the endoscope 5001 configured as a so-called rigid endoscope having a rigid barrel 5003 is illustrated, but the endoscope 5001 is configured as a so-called flexible mirror having a flexible barrel 5003 It is also good.
- a light source device 5043 is connected to the endoscope 5001, and light generated by the light source device 5043 is guided to the tip of the lens barrel by a light guide extended inside the lens barrel 5003, and an objective The light is emitted to the observation target in the body cavity of the patient 5071 through the lens.
- the endoscope 5001 is assumed to be a perspective endoscope.
- An optical system and an imaging device are provided inside the camera head 5005, and the reflected light (observation light) from the observation target is condensed on the imaging device by the optical system.
- the observation light is photoelectrically converted by the imaging element to generate an electric signal corresponding to the observation light, that is, an image signal corresponding to the observation image.
- the image signal is transmitted as RAW data to a camera control unit (CCU: Camera Control Unit) 5039.
- the camera head 5005 has a function of adjusting the magnification and the focal length by driving the optical system appropriately.
- a plurality of imaging devices may be provided in the camera head 5005 in order to cope with, for example, stereoscopic vision (3D display).
- a plurality of relay optical systems are provided inside the lens barrel 5003 in order to guide observation light to each of the plurality of imaging elements.
- the CCU 5039 is configured by a CPU (Central Processing Unit), a GPU (Graphics Processing Unit), and the like, and centrally controls the operation of the endoscope 5001 and the display device 5041. Specifically, the CCU 5039 subjects the image signal received from the camera head 5005 to various types of image processing for displaying an image based on the image signal, such as development processing (demosaicing processing). The CCU 5039 provides the display device 5041 with the image signal subjected to the image processing. Also, the CCU 5039 transmits a control signal to the camera head 5005 to control the driving thereof.
- the control signal may include information on imaging conditions such as magnification and focal length.
- the display device 5041 displays an image based on the image signal subjected to the image processing by the CCU 5039 under the control of the CCU 5039.
- the endoscope 5001 corresponds to high resolution imaging such as 4K (horizontal pixel number 3840 ⁇ vertical pixel number 2160) or 8K (horizontal pixel number 7680 ⁇ vertical pixel number 4320), and / or 3D display
- the display device 5041 corresponds to each of the display devices, those capable of high-resolution display and / or those capable of 3D display may be used.
- the display device 5041 can have a size of 55 inches or more to obtain a further immersive feeling. Further, a plurality of display devices 5041 different in resolution and size may be provided depending on the application.
- the light source device 5043 is composed of a light source such as an LED (light emitting diode), for example, and supplies the endoscope 5001 with irradiation light when imaging the surgical site.
- a light source such as an LED (light emitting diode)
- the arm control device 5045 is constituted by a processor such as a CPU, for example, and operates in accordance with a predetermined program to control driving of the arm portion 5031 of the support arm device 5027 according to a predetermined control method.
- the input device 5047 is an input interface to the endoscopic surgery system 5000.
- the user can input various instructions and input instructions to the endoscopic surgery system 5000 via the input device 5047.
- the user inputs various information related to surgery, such as physical information of a patient and information on an operation procedure of the surgery, through the input device 5047.
- the user instructs, via the input device 5047, an instruction to drive the arm unit 5031 or an instruction to change the imaging condition (type of irradiated light, magnification, focal length, etc.) by the endoscope 5001. , An instruction to drive the energy treatment instrument 5021, and the like.
- the type of the input device 5047 is not limited, and the input device 5047 may be any of various known input devices.
- a mouse, a keyboard, a touch panel, a switch, a foot switch 5057, and / or a lever may be applied as the input device 5047.
- the touch panel may be provided on the display surface of the display device 5041.
- the input device 5047 is a device mounted by the user, such as a glasses-type wearable device or an HMD (Head Mounted Display), for example, and various types of input according to the user's gesture or line of sight detected by these devices. Is done.
- the input device 5047 includes a camera capable of detecting the motion of the user, and various inputs are performed in accordance with the user's gesture and the line of sight detected from the image captured by the camera.
- the input device 5047 includes a microphone capable of collecting the user's voice, and various inputs are performed by voice via the microphone.
- the user for example, the operator 5067
- the input device 5047 being configured to be able to input various information in a non-contact manner. Is possible.
- the user can operate the device without releasing his / her hand from the operating tool, the convenience of the user is improved.
- the treatment tool control device 5049 controls the drive of the energy treatment instrument 5021 for ablation of tissue, incision, sealing of a blood vessel, and the like.
- the insufflation apparatus 5051 has a gas in the body cavity via the insufflation tube 5019 in order to expand the body cavity of the patient 5071 for the purpose of securing a visual field by the endoscope 5001 and securing a working space of the operator.
- Send The recorder 5053 is a device capable of recording various types of information regarding surgery.
- the printer 5055 is a device capable of printing various types of information regarding surgery in various types such as texts, images, and graphs.
- the support arm device 5027 includes a base portion 5029 which is a base and an arm portion 5031 extending from the base portion 5029.
- the arm unit 5031 includes a plurality of joints 5033 a, 5033 b, and 5033 c and a plurality of links 5035 a and 5035 b connected by the joints 5033 b, but in FIG.
- the structure of the arm unit 5031 is simplified and illustrated. In practice, the shapes, the number and arrangement of the joints 5033a to 5033c and the links 5035a and 5035b, and the direction of the rotation axis of the joints 5033a to 5033c are appropriately set so that the arm 5031 has a desired degree of freedom. obtain.
- the arm unit 5031 may be preferably configured to have six or more degrees of freedom.
- the endoscope 5001 can be freely moved within the movable range of the arm unit 5031. Therefore, the lens barrel 5003 of the endoscope 5001 can be inserted into the body cavity of the patient 5071 from a desired direction. It will be possible.
- the joints 5033 a to 5033 c are provided with an actuator, and the joints 5033 a to 5033 c are configured to be rotatable around a predetermined rotation axis by driving the actuators.
- the drive of the actuator is controlled by the arm control device 5045, whereby the rotation angles of the joint portions 5033a to 5033c are controlled, and the drive of the arm portion 5031 is controlled. Thereby, control of the position and posture of the endoscope 5001 can be realized.
- the arm control device 5045 can control the drive of the arm unit 5031 by various known control methods such as force control or position control.
- the driving of the arm unit 5031 is appropriately controlled by the arm control device 5045 according to the operation input, and
- the position and attitude of the endoscope 5001 may be controlled.
- the endoscope 5001 at the tip of the arm unit 5031 is moved from an arbitrary position to an arbitrary position, the endoscope 5001 can be fixedly supported at the position after the movement.
- the arm unit 5031 may be operated by a so-called master slave method. In this case, the arm unit 5031 can be remotely controlled by the user via the input device 5047 installed at a location distant from the operating room.
- the arm control device 5045 receives the external force from the user, and the actuator of each joint 5033 a to 5033 c is moved so that the arm 5031 moves smoothly following the external force. So-called power assist control may be performed. Accordingly, when the user moves the arm unit 5031 while directly touching the arm unit 5031, the arm unit 5031 can be moved with a relatively light force. Therefore, it is possible to move the endoscope 5001 more intuitively and with a simpler operation, and the convenience of the user can be improved.
- the endoscope 5001 is supported by a doctor called scopist.
- the support arm device 5027 by using the support arm device 5027, the position of the endoscope 5001 can be more reliably fixed without manual operation, so that an image of the operation site can be stably obtained. , Can be performed smoothly.
- the arm control device 5045 may not necessarily be provided in the cart 5037. Also, the arm control device 5045 may not necessarily be one device. For example, the arm control device 5045 may be provided at each joint 5033a to 5033c of the arm 5031 of the support arm device 5027, and the arm control devices 5045 cooperate with one another to drive the arm 5031. Control may be realized.
- the light source device 5043 supplies the endoscope 5001 with irradiation light for imaging the operative part.
- the light source device 5043 is composed of, for example, a white light source configured of an LED, a laser light source, or a combination thereof.
- a white light source is configured by a combination of RGB laser light sources
- the output intensity and output timing of each color (each wavelength) can be controlled with high accuracy. Adjustments can be made.
- the laser light from each of the RGB laser light sources is irradiated on the observation target in time division, and the drive of the imaging device of the camera head 5005 is controlled in synchronization with the irradiation timing to cope with each of RGB. It is also possible to capture a shot image in time division. According to the method, a color image can be obtained without providing a color filter in the imaging device.
- the drive of the light source device 5043 may be controlled to change the intensity of the light to be output at predetermined time intervals.
- the drive of the imaging element of the camera head 5005 is controlled in synchronization with the timing of the change of the light intensity to acquire images in time division, and by combining the images, high dynamic without so-called blackout and whiteout is obtained. An image of the range can be generated.
- the light source device 5043 may be configured to be able to supply light of a predetermined wavelength band corresponding to special light observation.
- special light observation for example, the mucous membrane surface layer is irradiated by irradiating narrow band light as compared with irradiation light (that is, white light) at the time of normal observation using the wavelength dependency of light absorption in body tissue.
- the so-called narrow band imaging is performed to image a predetermined tissue such as a blood vessel with high contrast.
- fluorescence observation may be performed in which an image is obtained by fluorescence generated by irradiation with excitation light.
- a body tissue is irradiated with excitation light and fluorescence from the body tissue is observed (autofluorescence observation), or a reagent such as indocyanine green (ICG) is locally injected into the body tissue while being locally injected. What irradiates the excitation light corresponding to the fluorescence wavelength of the reagent, and obtains a fluorescence image etc. can be performed.
- the light source device 5043 can be configured to be able to supply narrow band light and / or excitation light corresponding to such special light observation.
- FIG. 2 is a block diagram showing an example of the functional configuration of the camera head 5005 and the CCU 5039 shown in FIG.
- the camera head 5005 has a lens unit 5007, an imaging unit 5009, a drive unit 5011, a communication unit 5013, and a camera head control unit 5015 as its functions.
- the CCU 5039 also has a communication unit 5059, an image processing unit 5061, and a control unit 5063 as its functions.
- the camera head 5005 and the CCU 5039 are communicably connected in both directions by a transmission cable 5065.
- the lens unit 5007 is an optical system provided at the connection with the lens barrel 5003.
- the observation light taken in from the tip of the lens barrel 5003 is guided to the camera head 5005 and enters the lens unit 5007.
- the lens unit 5007 is configured by combining a plurality of lenses including a zoom lens and a focus lens.
- the optical characteristic of the lens unit 5007 is adjusted so as to condense the observation light on the light receiving surface of the imaging element of the imaging unit 5009.
- the zoom lens and the focus lens are configured such that the position on the optical axis can be moved in order to adjust the magnification and the focus of the captured image.
- the imaging unit 5009 includes an imaging element and is disposed downstream of the lens unit 5007.
- the observation light which has passed through the lens unit 5007 is condensed on the light receiving surface of the imaging device, and an image signal corresponding to the observation image is generated by photoelectric conversion.
- the image signal generated by the imaging unit 5009 is provided to the communication unit 5013.
- an imaging element which comprises the imaging part 5009 it is an image sensor of a CMOS (Complementary Metal Oxide Semiconductor) type, for example, and a color imaging
- CMOS Complementary Metal Oxide Semiconductor
- photography of the high resolution image of 4K or more may be used, for example.
- an imaging element constituting the imaging unit 5009 is configured to have a pair of imaging elements for acquiring image signals for right eye and left eye corresponding to 3D display.
- the 3D display enables the operator 5067 to more accurately grasp the depth of the living tissue at the operation site.
- the imaging unit 5009 is configured as a multi-plate type, a plurality of lens units 5007 are also provided corresponding to each imaging element.
- the imaging unit 5009 may not necessarily be provided in the camera head 5005.
- the imaging unit 5009 may be provided inside the lens barrel 5003 immediately after the objective lens.
- the drive unit 5011 is configured by an actuator, and moves the zoom lens and the focus lens of the lens unit 5007 along the optical axis by a predetermined distance under the control of the camera head control unit 5015. Thereby, the magnification and the focus of the captured image by the imaging unit 5009 may be appropriately adjusted.
- the communication unit 5013 is configured of a communication device for transmitting and receiving various types of information to and from the CCU 5039.
- the communication unit 5013 transmits the image signal obtained from the imaging unit 5009 to the CCU 5039 via the transmission cable 5065 as RAW data.
- the image signal be transmitted by optical communication in order to display the captured image of the surgical site with low latency.
- the operator 5067 performs the operation while observing the condition of the affected area by the captured image, so for safer and more reliable operation, the moving image of the operation site is displayed in real time as much as possible It is because that is required.
- the communication unit 5013 is provided with a photoelectric conversion module which converts an electrical signal into an optical signal.
- the image signal is converted into an optical signal by the photoelectric conversion module, and then transmitted to the CCU 5039 via the transmission cable 5065.
- the communication unit 5013 also receives, from the CCU 5039, a control signal for controlling the drive of the camera head 5005.
- the control signal includes, for example, information indicating that the frame rate of the captured image is designated, information indicating that the exposure value at the time of imaging is designated, and / or information indicating that the magnification and focus of the captured image are designated, etc. Contains information about the condition.
- the communication unit 5013 provides the received control signal to the camera head control unit 5015.
- the control signal from CCU 5039 may also be transmitted by optical communication.
- the communication unit 5013 is provided with a photoelectric conversion module that converts an optical signal into an electric signal, and the control signal is converted into an electric signal by the photoelectric conversion module and is then provided to the camera head control unit 5015.
- the imaging conditions such as the frame rate, the exposure value, the magnification, and the focus described above are automatically set by the control unit 5063 of the CCU 5039 based on the acquired image signal. That is, so-called AE (Auto Exposure) function, AF (Auto Focus) function, and AWB (Auto White Balance) function are installed in the endoscope 5001.
- AE Auto Exposure
- AF Automatic Focus
- AWB Automatic White Balance
- the camera head control unit 5015 controls the drive of the camera head 5005 based on the control signal from the CCU 5039 received via the communication unit 5013. For example, the camera head control unit 5015 controls the drive of the imaging element of the imaging unit 5009 based on the information to specify the frame rate of the captured image and / or the information to specify the exposure at the time of imaging. Also, for example, the camera head control unit 5015 appropriately moves the zoom lens and the focus lens of the lens unit 5007 via the drive unit 5011 based on the information indicating that the magnification and the focus of the captured image are designated.
- the camera head control unit 5015 may further have a function of storing information for identifying the lens barrel 5003 and the camera head 5005.
- the camera head 5005 can have resistance to autoclave sterilization.
- the communication unit 5059 is configured of a communication device for transmitting and receiving various types of information to and from the camera head 5005.
- the communication unit 5059 receives an image signal transmitted from the camera head 5005 via the transmission cable 5065.
- the image signal can be suitably transmitted by optical communication.
- the communication unit 5059 is provided with a photoelectric conversion module that converts an optical signal into an electrical signal in response to optical communication.
- the communication unit 5059 provides the image processing unit 5061 with the image signal converted into the electrical signal.
- the communication unit 5059 transmits a control signal for controlling driving of the camera head 5005 to the camera head 5005.
- the control signal may also be transmitted by optical communication.
- An image processing unit 5061 performs various types of image processing on an image signal that is RAW data transmitted from the camera head 5005.
- image processing for example, development processing, high image quality processing (band emphasis processing, super-resolution processing, NR (noise reduction) processing and / or camera shake correction processing, etc.), and / or enlargement processing (electronic zoom processing) And various other known signal processings.
- the image processing unit 5061 also performs detection processing on the image signal to perform AE, AF, and AWB.
- the image processing unit 5061 is configured by a processor such as a CPU or a GPU, and the image processing and the detection processing described above can be performed by the processor operating according to a predetermined program.
- the image processing unit 5061 is configured by a plurality of GPUs, the image processing unit 5061 appropriately divides the information related to the image signal, and performs image processing in parallel by the plurality of GPUs.
- the control unit 5063 performs various types of control regarding imaging of the surgical site by the endoscope 5001 and display of the imaged image. For example, the control unit 5063 generates a control signal for controlling the drive of the camera head 5005. At this time, when the imaging condition is input by the user, the control unit 5063 generates a control signal based on the input by the user. Alternatively, when the endoscope 5001 is equipped with the AE function, the AF function, and the AWB function, the control unit 5063 determines the optimum exposure value, focal length, and the like according to the result of the detection processing by the image processing unit 5061. The white balance is appropriately calculated to generate a control signal.
- control unit 5063 causes the display device 5041 to display an image of the operative site based on the image signal subjected to the image processing by the image processing unit 5061.
- control unit 5063 recognizes various objects in the surgical site image using various image recognition techniques. For example, the control unit 5063 detects a shape, a color, and the like of an edge of an object included in an operation part image, thereby enabling a surgical tool such as forceps, a specific living part, bleeding, mist when using the energy treatment tool 5021, and the like. It can be recognized.
- control unit 5063 When the control unit 5063 causes the display device 5041 to display the image of the operation unit, the control unit 5063 superimposes and displays various types of surgery support information on the image of the operation unit, using the recognition result.
- the operation support information is superimposed and presented to the operator 5067, which makes it possible to proceed with the operation more safely and reliably.
- a transmission cable 5065 connecting the camera head 5005 and the CCU 5039 is an electrical signal cable compatible with communication of electrical signals, an optical fiber compatible with optical communication, or a composite cable of these.
- communication is performed by wire communication using the transmission cable 5065, but communication between the camera head 5005 and the CCU 5039 may be performed wirelessly.
- the communication between the two is performed wirelessly, it is not necessary to lay the transmission cable 5065 in the operating room, so that the movement of the medical staff in the operating room can be eliminated by the transmission cable 5065.
- the endoscopic surgery system 5000 to which the technology according to the present disclosure can be applied has been described.
- the endoscopic surgery system 5000 was demonstrated as an example here, the system to which the technique which concerns on this indication can be applied is not limited to this example.
- the technology according to the present disclosure may be applied to a flexible endoscopic system for examination or a microsurgical system.
- the support arm device described below is an example configured as a support arm device that supports the endoscope at the tip of the arm unit, but the present embodiment is not limited to the example.
- FIG. 3 is a schematic view showing an appearance of a support arm device 1400 according to the present embodiment.
- the support arm device 1400 includes a base portion 1410 and an arm portion 1420.
- the base 1410 is a base of the support arm device 1400, and the arm 1420 is extended from the base 1410.
- a control unit that integrally controls the support arm device 1400 may be provided in the base unit 1410, and the driving of the arm unit 1420 may be controlled by the control unit.
- the said control part is comprised by various signal processing circuits, such as CPU and DSP, for example.
- the arm unit 1420 includes a plurality of active joint units 1421a to 1421f, a plurality of links 1422a to 1422f, and an endoscope device 423 as a tip unit provided at the tip of the arm unit 1420.
- the links 1422a to 1422f are substantially rod-like members.
- One end of link 1422a is connected to base 1410 via active joint 1421a
- the other end of link 1422a is connected to one end of link 1422b via active joint 1421b
- the other end of link 1422b is an active joint It is connected with one end of the link 1422 c through the portion 1421 c.
- the other end of the link 1422 c is connected to the link 1422 d via the passive slide mechanism 1100
- the other end of the link 1422 d is connected to one end of the link 1422 e via the passive joint 200.
- the other end of the link 1422 e is connected to one end of the link 1422 f via the active joints 1421 d and 1421 e.
- the endoscope apparatus 1423 is connected to the distal end of the arm 1420, that is, the other end of the link 1422f via an active joint 1421f.
- the ends of the plurality of links 1422a to 1422f are connected to one another by the active joints 1421a to 1421f, the passive slide mechanism 1100, and the passive joint 1200, using the base 1410 as a fulcrum.
- An arm shape to be stretched is configured.
- the position and posture of the endoscope apparatus 1423 are controlled by driving and controlling the actuators provided in the active joint sections 1421a to 1421f of the arm section 1420.
- the endoscope apparatus 1423 enters a body cavity of a patient whose distal end is the treatment site, and images a partial region of the treatment site.
- the distal end unit provided at the distal end of the arm unit 1420 is not limited to the endoscope device 1423, and various medical instruments may be connected to the distal end of the arm unit 1420 as a distal end unit.
- the support arm device 1400 according to the present embodiment is configured as a medical support arm device provided with a medical instrument.
- the support arm device 1400 will be described by defining coordinate axes as shown in FIG. Also, according to the coordinate axes, the vertical direction, the longitudinal direction, and the horizontal direction are defined. That is, the vertical direction with respect to the base portion 1410 installed on the floor is defined as the z-axis direction and the vertical direction.
- a direction perpendicular to the z-axis which is a direction in which the arm unit 1420 extends from the base unit 1410 (that is, a direction in which the endoscope device 1423 is positioned with respect to the base unit 1410) It defines as the direction and the front and back direction.
- directions orthogonal to the y-axis and z-axis are defined as x-axis direction and left-right direction.
- the active joints 1421a to 1421f pivotally connect the links to each other.
- the active joint portions 1421a to 1421f have an actuator, and have a rotation mechanism that is rotationally driven with respect to a predetermined rotation axis by driving of the actuator.
- By controlling the rotational drive in each of the active joint portions 1421a to 1421f it is possible to control the drive of the arm portion 1420 such as stretching or contraction (folding) of the arm portion 1420, for example.
- the drive of the active joints 1421a to 1421f can be controlled by, for example, known whole-body coordinated control and ideal joint control.
- the drive control of the active joints 1421a to 1421f specifically refers to the rotation angles of the active joints 1421a to 1421f and And / or means that the generated torque (torque generated by the active joints 1421a to 1421f) is controlled.
- the passive slide mechanism 1100 is an aspect of the passive configuration changing mechanism, and links the link 1422 c and the link 1422 d so as to be able to move back and forth along a predetermined direction.
- the passive slide mechanism 1100 may link the link 1422c and the link 1422d so as to be linearly movable relative to each other.
- the advancing and retracting motion of the link 1422 c and the link 1422 d is not limited to the linear motion, and may be an advancing and retracting motion in a direction forming an arc.
- the passive slide mechanism 1100 for example, the user performs an operation of advancing and retracting, and the distance between the active joint portion 1421c on one end side of the link 1422c and the passive joint portion 1200 is variable. This may change the overall configuration of the arm 1420. Details of the configuration of the passive slide mechanism 1100 will be described later.
- the passive joint 1200 is an aspect of the passive deformation mechanism, and pivotally connects the link 1422 d and the link 1422 e to each other.
- the user performs a turning operation to change the angle between the link 1422d and the link 1422e. This may change the overall configuration of the arm 1420. Details of the configuration of the passive joint 1200 will be described later.
- the attitude of the arm portion means the active joint portions 1421 a to 1421 f by the control portion in a state in which the distance between the active joint portions adjacent to each other across one or more links is constant.
- the state of the arm unit that can be changed by the drive control of the actuator provided in
- the form of the arm unit refers to the distance between the active joints adjacent to each other across the link or the link connecting the active joints adjacent to each other as the passive form changing mechanism is operated. It refers to the state of the arm part that can be changed by changing the angle between the two.
- the support arm device 1400 has six active joint portions 1421a to 1421f, and six degrees of freedom are realized in driving the arm portion 1420. That is, the drive control of the support arm device 1400 is realized by the drive control of the six active joints 1421a to 1421f by the controller, while the passive slide mechanism 1100 and the passive joint 1200 are the targets of the drive control by the controller. is not.
- the active joint portions 1421a, 1421d, 1421f rotate the long axis direction of the connected links 1422a, 1422e and the photographing direction of the connected endoscope apparatus 1423. It is provided to be in the axial direction.
- the active joint parts 1421b, 1421c, 1421e are each connected to the links 1422a to 1422c, 1422e, 1422f, and the connecting angle of the endoscope apparatus 423 in the yz plane (a plane defined by the y axis and the z axis) It is provided so that the x-axis direction, which is the direction to be changed inside, is the rotation axis direction.
- the active joints 1421a, 1421d, and 1421f have a function of performing so-called yawing
- the active joints 1421b, 1421c, and 1421e have a function of performing so-called pitching.
- a hemisphere is illustrated as an example of the movable range of the endoscope apparatus 1423.
- RCM remote movement center
- the arm 1420 may have a degree of freedom 1421 g for rotating the endoscope apparatus 1423 coaxially with the link 1422 f.
- the endoscope apparatus 1423 can be rotated with the longitudinal axis of the link 1422 f as a rotation axis.
- FIG. 4 is a block diagram showing an example of the overall configuration of a support arm device 1400 including a control device 1350.
- the control device 1350 includes a control unit 1351, a storage unit 1357, and an input unit 1359.
- the control unit 1351 is configured of, for example, various signal processing circuits such as a CPU and a DSP.
- the control unit 1351 integrally controls the control device 1350 and performs various calculations for controlling the drive of the arm unit 1420 in the support arm device 1400.
- the control unit 1351 includes a whole body coordination control unit 1353 and an ideal joint control unit 1355.
- the whole body coordination control unit 1353 performs various calculations in whole body coordination control in order to drive and control the actuators 1430 provided in the active joints 1421 a to 1421 f of the arm unit 1420 of the support arm device 1400.
- the ideal joint control unit 1355 performs various calculations in the ideal joint control that realizes an ideal response to the whole-body coordinated control by correcting the influence of the disturbance.
- the storage unit 1357 may be, for example, a storage element such as a random access memory (RAM) or a read only memory (ROM), or may be a semiconductor memory, a hard disk, or an external storage device.
- RAM random access memory
- the input unit 359 is an input interface for the user to input information, commands, and the like regarding drive control of the support arm device 400 to the control unit 351.
- the input unit 359 has, for example, operation means operated by the user such as a lever, a pedal, etc., and the position, speed, etc. of each component of the arm unit 420 are instantaneous motion according to the operation of the lever, pedal etc It may be set as a purpose.
- the input unit 359 may include, for example, an operation unit operated by the user such as a mouse, a keyboard, a touch panel, a button, and a switch, in addition to a lever and a pedal.
- the arm unit 1420 controlled by the control device 1350 includes an active joint unit 1421.
- the active joint portion 1421 (1421a to 1421f) has various configurations necessary for driving the arm portion 1420, such as a support member for connecting or supporting the links 1422a to 1422f and the endoscope apparatus 1423.
- the drive of the joint of the arm 1420 may mean the drive of the actuator 430 in the active joints 1421a to 1421f.
- the active joint 1421 includes a torque sensor 1428, an encoder 1427 and an actuator 1430. Although the actuator 1430, the encoder 1427, and the torque sensor 1428 are shown separately in FIG. 4, the encoder 1427 and the torque sensor 1428 may be included in the actuator 1430.
- the actuator 1430 is composed of a motor, a motor driver, and a reduction gear.
- the actuator 1430 is, for example, an actuator corresponding to force control.
- the rotation of the motor is decelerated by the reduction gear at a predetermined reduction ratio, and is transmitted to another member in the subsequent stage via the output shaft, whereby the other member is driven.
- the motor is a drive mechanism that produces a rotational drive force.
- the motor is driven to generate torque corresponding to a torque command value from the control unit under control of the motor driver.
- a brushless motor is used as the motor.
- the present embodiment is not limited to this example, and various known types of motors may be used as the motor.
- the motor driver is a driver circuit (driver IC (Integrated Circuit)) that rotationally drives the motor by supplying current to the motor, and controls the number of rotations of the motor by adjusting the amount of current supplied to the motor. Can.
- the motor driver drives the motor by supplying a current corresponding to the torque command value ⁇ from the control unit to the motor.
- the motor driver can also adjust the viscous drag coefficient in the rotational movement of the actuator 1430 by adjusting the amount of current supplied to the motor. This makes it possible to apply a predetermined resistance to the rotational movement of the actuator 1430, that is, the rotational movement of the active joint portions 1421a to 1421f.
- the active joint portions 1421a to 1421f can be set in a state in which they can easily rotate with respect to an externally applied force (that is, a state in which the arm portion 1420 can be easily moved manually). It is also possible to make it difficult to rotate with respect to the force (that is, a state in which it is difficult to move the arm 1420 manually).
- a reduction gear is connected to the rotation shaft (drive shaft) of the motor.
- the reduction gear decelerates the rotational speed of the rotation shaft of the connected motor (that is, the rotation speed of the input shaft) at a predetermined reduction ratio and transmits it to the output shaft.
- the configuration of the reduction gear is not limited to a specific one, and various kinds of known reduction gears may be used as the reduction gear.
- the reduction gear it is preferable to use, for example, a harmonic drive (registered trademark) or the like that can set the reduction ratio with high accuracy.
- the reduction gear ratio of the reduction gear can be appropriately set according to the application of the actuator 1430.
- a reduction gear having a reduction ratio of about 1: 100 can be suitably used.
- the encoder 1427 detects the rotation angle of the input shaft (ie, the rotation angle of the rotation shaft of the motor). Based on the number of rotations of the input shaft detected by the encoder 1427 and the reduction ratio of the reduction gear, information such as the rotation angle, rotation angular velocity, and rotation angular acceleration of the active joint portions 1421a to 1421f can be obtained.
- the encoder 1427 for example, various known rotary encoders such as a magnetic encoder and an optical encoder may be used.
- the encoder 1427 may be provided only on the input shaft of the actuator 1430, or an encoder for detecting the rotation angle or the like of the output shaft of the actuator 1430 may be further provided downstream of the reduction gear.
- the torque sensor 1428 is connected to the output shaft of the actuator 1430 and detects a torque acting on the actuator 1430.
- the torque sensor 1428 detects a torque (generated torque) output by the actuator 1430.
- the torque sensor 1428 can also detect an external torque applied to the actuator 1430 from the outside.
- the operation of the arm unit 1420 is controlled by force control.
- the rotation angle of each active joint 1421a to 1421f and the torque acting on each active joint 1421a to 1421f by the encoder 1427 and the torque sensor 1428 provided for each actuator 1430. are detected respectively.
- the torque acting on each of the active joint portions 1421a to 1421f detected by the torque sensor 1428 may include the force acting on the arm portion 1420 and / or the endoscope apparatus 1423.
- the current state (position, speed, etc.) of the arm unit 1420 may be acquired.
- a torque to be generated by 1430 is calculated, and the actuator 1430 of each of the active joint portions 1421a to 1421f is driven with the torque as a control value.
- actuator 1430 various known actuators generally used in various devices whose operation is controlled by force control can be used.
- the actuator 1430 those described in Japanese Patent Application Laid-Open Nos. 2009-269102 and 2011-209099, which are prior patent applications filed by the present applicant, can be suitably used.
- the configuration of the actuator 1430 and each component constituting the actuator is not limited to the above configuration, and may be another configuration.
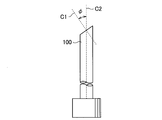
- FIG. 5 is a schematic view showing the appearance of the oblique endoscope 100.
- the direction (C1) of the objective lens to the subject has a predetermined angle ⁇ with respect to the longitudinal direction (scope axis C2) of the oblique mirror 100. That is, in the oblique endoscope 100, the objective optical system forms an angle with the eyepiece optical system of the scope.
- oblique rotation an operation of rotating the oblique endoscope 100 with the scope axis C2 as a rotation axis (hereinafter, referred to as oblique rotation) is performed for observation.
- oblique rotation By performing oblique rotation, it is possible to obtain a circling visual field and peripheral visual fields in the top, bottom, left, and right.
- FIG. 6 is a schematic view showing how the visual field 200 displayed on the display device 5041 is changed by oblique rotation.
- the field of view 200 displayed on the monitor if the oblique view is rotated by the oblique view rotation angle ⁇ to control the vertical direction of the field of view 200, the field of view displayed on the monitor will be the field of view 200 Change to a field of view 200 '. Therefore, by controlling the oblique rotation and the two axes in the vertical direction of the camera, the upper, lower, left, and right peripheral vision can be obtained.
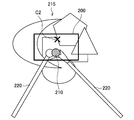
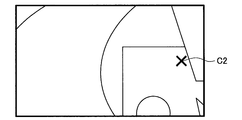
- FIG. 7 is a schematic view showing how the visual field displayed on the monitor is changed by oblique rotation.
- FIG. 7 shows a state in which the inside of the body is observed with a perspective endoscope, and shows a state in which an observation object 210 which a user (operator) tries to look at is present in various organs 215.
- the visual field 200 of the monitor is shown as a rectangular area, and the observation object 210 and the scope axis C2 which the user (operator) tries to look at are shown together with the visual field 200.
- FIG. 7 shows a state in which the operator brings a surgical tool 220 such as forceps into contact with the observation object 210 and holds the observation object 210 or the like.
- FIG. 7 shows how the observation object 210 moves with respect to the field of view 200 when the oblique endoscope 100 is rotated about the scope axis C2.
- FIG. 7 shows a state of “under oblique view” in which the optical axis of the oblique view objective 100 is directed downward in the vertical direction of the field of view 200.
- the observation object 210 enters the visual field 200, and the operator can visually recognize the observation object 210 on the monitor.
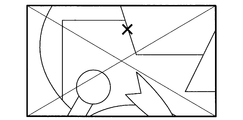
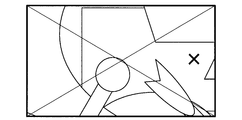
- the “right oblique” view shown in FIG. 7 shows a state in which the optical axis of the oblique view objective 100 is directed to the right in the lateral direction of the field of view 200.
- the observation object 210 deviates from the visual field 200, and the operator can not visually recognize the observation object 210 on the monitor.
- the view “on oblique view” shown in FIG. 7 shows a state in which the optical axis of the objective optical system of the oblique view mirror 100 is directed upward in the vertical direction of the field of view 200. Further, in the “left oblique” view shown in FIG. 7, the optical axis of the oblique view objective 100 is directed to the left side in the left-right direction of the field of view 200. Also in these cases, the observation object 210 deviates from the visual field 200, and the operator can not view the observation object 210 on the monitor.
- the position of the field of view with respect to the observation object 210 can be changed by performing oblique rotation, and a relatively wide range around the scope axis C2 can be visually recognized.
- FIG. 7 there is a possibility that a portion or instrument that the user wants to see may deviate from the visual field 200 of the monitor due to the oblique rotation, and may lose sight of those places.
- the position of the observation object 210 is detected, and the arm is controlled so that the observation object 210 moves to the center of the screen.
- the rotational speed at the time of oblique rotation is changed according to the position of the observation object 210 with respect to the visual field 200. Specifically, control is performed such that the rotational speed at the time of oblique rotation is slower as the observation target object 210 is farther from the center of the field of view 200. As the observation target object 210 moves away from the center of the field of view 200, the observation target object 210 is more likely to be out of the field of view 200 when oblique rotation is performed.
- the rotational speed at the time of oblique view rotation is reduced, so that the observation object 210 is less likely to come out of the field 200, and the position of the observation object 210 is lost Will be suppressed.
- the follow-up function and the oblique view rotation speed are different, it is possible for the screen to move out of the screen unless the movement speed of freedom to move the screen vertically and horizontally and the oblique view rotation speed is coordinated. There is sex. For this reason, while controlling so that the observation object 210 is at the center of the screen, the speed of oblique rotation is controlled to be reduced according to the distance L from the center of the screen to the object 21 or the relative position.
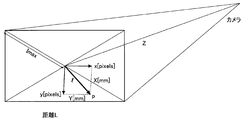
- FIG. 8 is a schematic view showing a method of calculating the distance from the center of the visual field 200 to the observation object 210.
- the oblique rotation speed is ⁇ [rad / s]
- the number of pixels from the screen center O to the position p of the observation object 210 is (x, y) [pixels]
- FIG. 9 is a schematic view showing an example of a map that defines the speed of oblique rotation in accordance with the position of the subject in the screen.
- the map 400 shows an example based on FIG. 8 in which the speed of oblique rotation is reduced as the distance from the screen center O increases.
- the density of dots on the map 400 corresponds to the speed of oblique rotation
- the map 410 shows the relationship between the density of dots on the map 400 and the speed of oblique rotation. As shown in the map 410, the higher the dot density, the faster the oblique rotation speed. Therefore, in the map 400, as the distance from the screen center O increases, the speed of oblique rotation decreases.
- the graph also shows the relationship between the density of dots, the speed of oblique rotation, and the distance to the subject (observation target 210).
- the speed of oblique rotation is lower as the distance to the object is shorter. The closer the distance to the subject, the more the amount of movement of the observation object 210 in the field of view 200 according to the movement of the oblique endoscope 100. Therefore, as the distance to the subject decreases, the speed of oblique rotation decreases. It is possible to prevent the observation object 210 from being lost from 200.
- FIG. 10 is a characteristic diagram showing the relationship between the distance from the screen center O to the observation object 210 (horizontal axis) and the oblique rotation speed (vertical axis). As described above, the control is performed so that the speed of oblique rotation decreases as the distance from the screen center O to the observation object 210 increases, but variations as illustrated in FIG. 10 can be assumed as a control method.
- control is performed with priority given to the speed of oblique rotation. If the movement of the arm in the X and Y directions is fast enough, tracking of the observation object 210 is possible even with such characteristics. Since the rotational speed of the oblique endoscope is not 0 even at the screen end (Lmax), depending on the position of the observation object 210 at the start of oblique rotation, the observation object 210 may deviate from the screen.
- the observation object 210 is never removed from the visual field 200 when the XY movement is very slow.
- the observation object 210 deviates to some extent from the screen center O, the oblique rotation is completely stopped and only the XY movement is performed.
- FIG. 11 shows a state in which the direction of the optical axis of the objective optical system is changed by the rotation (the oblique rotation) of the center of the long axis of the oblique endoscope 100.
- the visual field also moves as described in FIG.
- FIG. 10 although it is possible to change the direction in which the operator looks by oblique rotation, the visual field also moves as described in FIG.
- FIG. 10 although it is possible to change the direction in which the operator looks by oblique rotation, the visual field also moves as described in FIG. On the other hand, FIG.
- a trocker point shall mean the position where a trocar is inserted in a human body.
- a rotational movement a movement of the oblique view pivot
- the oblique view rotation angle can be changed without removing the field of view.
- FIG. 13 shows an example of parallel movement without changing the posture of the oblique endoscope, and is a schematic view showing a case where oblique movement is performed along with the movement of parallel movement. In this case, the movement is performed without changing the posture of the oblique endoscope 100 with respect to the camera field of view.
- Oblique view angle ⁇ (around Y axis), oblique view rotation angle ⁇ (around Z axis), rigidoscope length L, distance R to the object to be observed, point V at the center of the visual field, amount of parallel movement (ax, ay, az) Then, the simultaneous transformation matrix representing translation is as follows.
- the simultaneous conversion matrix of the oblique angle and the oblique rotation angle can be expressed as follows.
- the initial position of the rigid scope root is set as the origin of (0, 0, 0) for simplification.
- the point V at the center of the field of view is as follows.
- the field of view can be moved by the same amount as the rigid mirror is moved in parallel.
- ax and ay according to the value of ⁇ so as to keep V constant, it is possible to keep looking at the target point while performing oblique rotation as shown in FIG.
- the amount of change of (ax, ay) to move V in order to keep the position constant is faster than the amount of change of (R cos ⁇ ⁇ , R sin ⁇ sin ⁇ )
- the object will not be out of view by the rotation of the oblique endoscope.
- the oblique rotation speed is controlled, it is possible to rotate the oblique without losing the object from the screen.
- the relative movement of (Rcos ⁇ ⁇ , Rsin ⁇ sin ⁇ ) and (ax, ay) affects the same movement by adjusting the speed of (ax, ay) in addition to the speed of the oblique rotation angle.
- Such a movement is limited to the case where there is no restriction of the trocar point, and corresponds to, for example, the case of a strabismus operation with a small thoracotomy / small incision in the chest. Because the motion is in the Y direction, the distance between the field of view 200 and the camera is maintained.
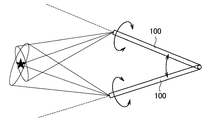
- FIG. 14 shows an example in which the field of view is moved in the vertical and horizontal directions by rotation around the constraining point 300.
- the restraint point 300 corresponds to, for example, a trocker point.
- the configuration of the arm can be realized with three degrees of freedom centered on the restraint point 300. Assuming that the rotation about the X axis around the constraining point 300 is ⁇ , and the rotation around the Y axis is ⁇ , each rotation matrix is as follows.
- the simultaneous transformation matrix of rotation about the constraint point 300 is as follows.
- the point V at the center of the field of view can be expressed as follows.
- the target values of ⁇ and ⁇ are selected so as to maintain the value of V.
- control can be performed without removing the object from the field of view even in the process of following the target value by adjusting the above-mentioned oblique rotation angle. It becomes possible.
- a control method of an arm may be used in which the position of the object in the screen is recognized by image recognition or the like and the observation object is moved in the screen based on the information.
- the support arm device is controlled such that the object present inside the patient's human body coincides with the optical axis of the endoscope attached to the support arm device and inserted into the patient's human body.
- an information processing apparatus comprising: a control unit for moving the endoscope. By controlling the arm so that the object appears at the screen center by recognizing the object by image recognition etc., it is possible to capture the object such as a surgical instrument or a tumor at the center of the image obtained by the endoscope The convenience of the operator is improved.
- Such an information processing apparatus may be configured separately from the endoscopic surgery system 5000, or may be configured as any device included in the endoscopic surgery system 5000.
- FIG. 15 and FIG. 16 are diagrams for explaining the outline of the present embodiment.
- FIG. 15 shows a state in which the barrel 5003 of the endoscope 5001 is inserted into the body cavity of the patient 5071 from the trocar 5025a punctured in the abdominal wall of the patient 5071.
- the endoscope 5001 indicated by a solid line indicates the current position and orientation
- the endoscope 5001 indicated by a broken line is a movement destination (i.e., the future) by the endoscope control processing according to the present embodiment. ) Shows the position and posture.
- forceps 5023 are inserted from the trocar 5025d punctured into the abdominal wall of the patient 5071.
- FIG. 15 shows a state in which the barrel 5003 of the endoscope 5001 is inserted into the body cavity of the patient 5071 from the trocar 5025a punctured in the abdominal wall of the patient 5071.
- an image (hereinafter also referred to as an endoscopic image) obtained by the endoscope 5001 shown in FIG. 15 is shown, and the left drawing is an image obtained at the current position and orientation, and the right drawing is It is an image obtained after movement by endoscope control processing concerning this embodiment.
- the tip of the forceps 5023 is captured within the field of view 6052 of the endoscope 5001 but not on the central axis (that is, the optical axis) 6051 . Therefore, as shown in the left view of FIG. 16, an endoscopic image in which the tip of the forceps 5023 is not shown at the center can be obtained.
- the endoscopic surgery system 5000 according to the present embodiment performs a process of moving the endoscope 5001 so that a surgical tool such as the forceps 5023 appears at the center of the screen.
- the endoscopic surgery system 5000 moves the endoscope 5001 by the support arm device 5027 (not shown) so that the tip of the forceps 5023 is positioned on the central axis 6051.
- the endoscope image in which the tip of the forceps 5023 appears at the center is obtained.
- the control of the oblique view 200 is considered by considering the oblique angle and the oblique rotation angle. It can be performed.
- the tip of the forceps 5023 is positioned on the central axis 6051
- the case where the observation target 210 is positioned on the central axis 6051 as a target by image recognition of the observation target 210 is similarly performed. be able to.
- the endoscopic surgery system 5000 can automatically follow the surgical instrument to provide an endoscopic image in which the surgical instrument is displayed at the center of the screen. Therefore, the operator can comfortably continue the operation without operating the endoscope 5001.
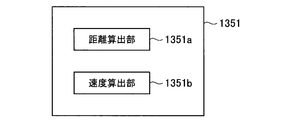
- FIG. 21 is a schematic view showing the configuration of the control unit 1351 of the support arm device 1400 for performing the above-described oblique rotation operation and follow-up operation.
- the control unit 1351 obtains a distance from the center of the visual field to the position of the observation object 210 in the visual field 200 obtained by imaging the observation object 210, and the visual field And a speed calculation unit 1351b that calculates the speed of oblique rotation of the oblique view 100 or the movement speed of the oblique view 100 based on the distance from the center of the object to the position of the observation object 210. Acquisition of the distance from the center of the field of view by the distance acquisition unit 1351a to the position of the observation object 210 is performed based on the result of image recognition of the observation object 210 by the control unit 5063 of the CCU 5039.
- control unit 1351 controls the support arm apparatus 1400 so that the observation target object 210 is positioned at the center of the field of view 200 based on the result of the control unit 5063 of the CCU 5039 performing image recognition of the observation target object 210. At this time, the control unit 1351 controls at least one of the speed of oblique rotation of the oblique view 100 and the movement speed of the oblique view 100 according to the position of the observation object 210 in the field of view 200. The control unit 1351 controls the rotation angle and the rotation speed of the oblique endoscope 100 around the long axis in accordance with the position of the observation target 210 in the field of view 200.
- control unit 5063 of the CCU 5039 can recognize the features of the image of the observation object 210 and the position in the field of view 200 using various image recognition techniques.
- the control unit 1351 acquires, from the CCU 5039, information on the position of the observation object 210 in the field of view 200.
- the operator can designate the observation object 210 from the operation site displayed on the display device 5041 by operating the input device 5047 while viewing the image of the operation site displayed on the display device 5041 in real time .
- the control unit 5063 recognizes the feature of the image of the observation target 210 and the position in the field of view 200 based on the designated observation target 210.
- FIG. 17 is a diagram for describing an overview of endoscope control processing according to the present embodiment.
- Each block shown in FIG. 17 shows a process, and the endoscope control process consists of a plurality of processes.
- the endoscopic surgery system 5000 performs image processing to detect a target such as a surgical instrument. Then, the endoscopic surgery system 5000 calculates the position of the target based on the detection result. Next, the endoscopic surgery system 5000 calculates the current posture of the endoscope based on the calculated target position and trocar position. Next, the endoscopic surgery system 5000 calculates a target endoscope tip position based on the calculated current posture of the endoscope and the setting information of the virtual surface (flat surface or curved surface).
- the endoscopic surgery system 5000 calculates the amount of change in the posture of the endoscope based on the current posture of the endoscope and the position of the tip of the endoscope to be a target, and the calculated amount of change
- the control information (i.e., command) of the arm for realizing the posture change is generated.
- the endoscopic surgery system 5000 controls the support arm (for example, the arm unit 5031) to operate according to the generated command.
- the endoscopic surgery system 5000 repeatedly performs the series of processes described above.
- the endoscopic surgery system 5000 can implement
- a calculation method will be described in which the arm operates the endoscope from the image processing portion (marker detection) and the detection result to move the tool to the center of the screen while considering the trocker point.
- the endoscopic surgery system 5000 detects a surgical tool (for example, the tip position and / or posture of the surgical tool) by image processing.
- a surgical tool for example, the tip position and / or posture of the surgical tool
- the position of the surgical instrument may be detected by image processing based on the endoscopic image. It is desirable that the marker be easy to detect.
- the marker may be a color such as blue or green that is noticeable compared to the color of an organ or blood vessel in a body cavity (for example, a color located opposite to the color of an organ or blood vessel in a color wheel).
- the marker may be a specific pattern such as a two-dimensional code or a barcode.
- the position of the surgical instrument is detected based on the detection result of the marker by the external sensor and information such as the length and posture of the surgical instrument.
- the detection of the surgical tool may be performed by a method other than image processing.
- the position of the surgical tool may be calculated based on the insertion amount of the surgical tool and the angle of the trocar.
- the position of the surgical instrument may be calculated from the position and orientation information of the support arm apparatus by attaching the surgical instrument to a support arm apparatus other than the endoscope.
- Target calculation The endoscopic surgery system 5000 performs target calculation.
- the target calculation is a calculation for calculating two of the position and the posture and instructing movement.
- the endoscopic surgery system 5000 first determines the target position from the image processing result, and then determines the amount of change in posture based on the current posture starting from the trocker point and the posture at the time the target position is reached. Do. In addition, the endoscopic surgery system 5000 performs target calculation based on the current position and orientation acquired from the encoder while obtaining the movement amount from the result of the image processing, but in the case of performing an actual instruction, The calculated command value is added to the command value. The reason for this is that there is a gap between the current value and the command value due to a control error, and if the goal is set with the current value as the starting point when issuing the command value, the operation is not smooth, and This is because a problem occurs in which the error increases.
- FIG. 18 is a flow chart showing an example of the flow of target calculation processing by the endoscopic surgery system 5000 according to the present embodiment. As shown in FIG. 18, the endoscopic surgery system 5000 first performs coordinate calculation.
- the endoscopic surgery system 5000 first calculates coordinates based on the current value. Specifically, the endoscopic surgery system 5000 acquires an image processing result (step S402). Then, the endoscopic surgery system 5000 converts the detected position into the camera coordinate system (ie, 2D to 3D conversion) (step S404). Next, the endoscopic surgery system 5000 converts the camera coordinate system into the world coordinate system (step S406). Next, the endoscopic surgery system 5000 converts the trocker point into a unit vector (step S408). Next, the endoscopic surgery system 5000 obtains the length up to the intersection with the predetermined plane (that is, the virtual plane) (step S410). Next, the endoscopic surgery system 5000 converts the vector from the trocker point to the predetermined plane to the World coordinate system (step S412).
- the endoscopic surgery system 5000 converts the vector from the trocker point to the predetermined plane to the World coordinate system (step S412).
- the endoscopic surgery system 5000 calculates coordinates based on the command value after calculating coordinates based on the current value. Specifically, the endoscopic surgery system 5000 converts the endoscope length into the insertion depth (step S414).
- the endoscopic surgery system 5000 After coordinate calculation, the endoscopic surgery system 5000 performs posture calculation.
- the endoscopic surgery system 5000 first calculates the posture based on the current value. Specifically, the endoscopic surgery system 5000 acquires a current posture vector (step S416). Next, the endoscopic surgery system 5000 obtains the calculated attitude of the new target vector (step S418). Next, the endoscopic surgery system 5000 determines the amount of change in posture relative to the calculated new target vector (step S420).
- the endoscopic surgery system 5000 calculates the posture based on the command value after calculating the posture based on the current value. Specifically, the endoscopic surgery system 5000 converts the final command value into a posture change amount from the posture (step S422).
- the endoscopic surgery system 5000 obtains the target position and the target posture.
- FIG. 19 is a diagram for describing target position calculation according to the present embodiment.
- the position viewed from the camera coordinate system with the screen center of the camera tip set to (0.5, 0.5) is normalized to [0.0-1.0].
- the depth is, for example, 50 [mm] at the time of conversion, and combined with the angle of view. Do.
- the reason why the depth is assumed to be 50 [mm] will be described.
- the first reason is that if the assumed value is larger than the actual value, the movement amount of (x, y) becomes larger than the actual (x, y) and overruns (oscillates).
- the second reason is that the imaging distance in the assumed technique is set to 50 [mm] to 100 [mm] to set the shortest distance.
- the third reason is that if the actual distance is larger, the movement is determined from the residual in the next image processing result, and the goal can finally be reached.
- the endoscopic surgery system 5000 obtains a target posture after the target position is determined.
- the control unit 1351 controls the arm unit 1420 by the arm unit based on the target position and the target attitude.
- FIGS. 20A to 20D are schematic views for explaining a specific example in the case where the oblique view is directed to the left by the control of the oblique endoscope according to the present embodiment. Also in FIGS. 20A to 20D, as in FIG. 7, a state in which the observation target object 210 which the user (operator) tries to look at is present in various organs 215 is shown.
- FIG. 20A shows a state (state under oblique view) in which the optical axis of the objective optical system is directed to the lower side of the field of view 200 (the side of the operator who operates the surgical tool 220) with respect to the position of the scope axis C. It shows.
- FIG. 20A shows a state (state under oblique view) in which the optical axis of the objective optical system is directed to the lower side of the field of view 200 (the side of the operator who operates the surgical tool 220) with respect to the position of the scope axis C. It shows.
- FIG. 20A shows
- FIG. 20B is an enlarged view of the visual field 200 of FIG. 20A.
- observation object by oblique rotation compared to FIG. While the left side of the object 210 can be observed, the observation object 210 disappears.
- Example of providing a holding unit to independently control the rotation of the oblique endoscope >>
- the posture and the position of the oblique endoscope 100 are changed only by control of the active joint portions 1421a to 1421f of the arm portion 1420.
- a holding unit with a built-in actuator may be provided at the tip of the arm 1420 to independently control the rotation of the oblique endoscope.
- the rotation of the oblique endoscope 100 is performed by the holding unit, and the position of the entire oblique endoscope and the posture with respect to the operation unit can be controlled by the active joint of the arm.
- FIG. 22 is a schematic view showing a configuration in which a holding unit 7000 for independently controlling the rotation of the oblique view mirror 100 and the rotation of the camera head 7100 is provided at the tip of the arm portion 1420 in the configuration example shown in FIG. .
- the holding unit 7000 is attached to the endoscope unit attachment portion 7300 at the tip of the arm portion 1420, and comprises a camera head attachment portion 7100, a camera head rotation drive portion 7200, a perspective endoscope attachment portion 7400, and a perspective rotation drive portion 7500. There is.
- the camera head 5005 is attached to the camera head rotation drive unit 7200 via the camera head attachment unit 7100.
- the camera head rotation drive unit 7200 includes an actuator 7210 such as a motor, and rotates the camera head 5005 with respect to the endoscope unit attachment unit 7300 and the main body of the holding unit 7000.
- the oblique endoscope 100 is attached to the oblique rotation drive unit 7500 via the oblique attachment unit 7400.
- the oblique endoscope rotation drive unit 7500 includes an actuator 7510 such as a motor, and rotates the oblique endoscope 100 about its axis with respect to the endoscope unit attachment unit 7300 and the main body of the holding unit 7000.
- FIG. 23 is a schematic view showing a configuration of a support arm apparatus 1400 including an arm unit 1420 and a control device 1350, and a configuration of an endoscope unit 5006 and a CCU 5039 in the configuration example shown in FIG.
- the control device 1350 is provided with a CCU communication unit 1358 which communicates with the CCU 5039 in addition to the configuration shown in FIG.
- the CCU 5039 includes an arm communication unit 5064 that communicates with the control device 1350.
- the control device 1350 and the CCU 5039 can transmit and receive information to each other as the CCU communication unit 1358 and the arm communication unit 5064 communicate.
- the endoscope unit 5006 is obtained by adding the function of the holding unit 7000 to the camera head 5005 shown in FIG. 2, and instead of the control unit 5015 shown in FIG. Is equipped.
- the endoscope unit 5006 includes a perspective control unit (first control unit) 5016, a camera head control unit (second control unit) 5017, and a perspective rotation drive unit A camera head rotation drive unit 7200 is provided.
- the perspective control unit 5016 and the camera head control unit 5017 may be provided in the holding unit 7000.
- the functions of the endoscope unit control unit 5014, the oblique view control unit 5016, and the camera head control unit 5017 may be provided to the control unit 1351 of the control device 1350.
- the oblique view control unit 5016 drives the actuator 7510 based on a command from the endoscope unit control unit 5014.
- the actuator 7510 and the oblique rotation unit encoder 7520 are provided in the oblique endoscope rotation drive unit 7500.
- the endoscope unit control unit 5014 drives the actuator 7510 based on the rotation angle of the actuator 7510 detected by the oblique rotation unit encoder 7520 to control the rotation of the oblique endoscope 100 about the axis.
- the camera head control unit 5017 drives the actuator 7210 based on the command of the endoscope unit control unit 5014.
- the actuator 7210 and the camera head rotation unit encoder 7220 are provided in the camera head rotation drive unit 7200.
- the endoscope unit control unit 5014 controls the rotation around the axis of the camera head 5005 based on the rotation angle of the actuator 7210 detected by the camera head rotation unit encoder 7220.
- the oblique endoscope 100 and the camera head 5005 can rotate independently with respect to the endoscope unit attachment portion 7300.
- the oblique endoscope 100 can be rotated to visually recognize a desired observation target, and the camera head 5005 can be rotated to appropriately control the top and bottom of the image.
- FIG. 24 is a sequence diagram showing the flow of processing in the configuration shown in FIGS. 22 and 23.
- step S502 information about the oblique rotation of the oblique endoscope 100 and the attitude of the camera head 5005 in the vertical direction control is sent from the endoscope unit to the CCU 5039.
- step S504 the CCU 5039 sends information on the oblique rotation of the oblique view mirror 100 and the attitude of the top and bottom control of the camera head 5005 to the arm control device.
- step S506 an arm control command and a drive command value of the endoscope unit are calculated.
- step S508 the drive command value of the endoscope unit is sent from the arm control device to the CCU 5039 together with the drive command.
- step S510 the arm is controlled based on the arm control command.
- step S512 the drive command value of the endoscope unit is sent from the CCU 5039 to the endoscope unit together with the drive command.
- step S514 the endoscope unit is controlled based on the drive command value.
- next step S5166 information on the oblique rotation of the oblique endoscope 100 and the attitude of top-bottom control of the camera head 5005 is sent from the endoscope unit to the CCU 5039.
- the CCU 5039 sends information on the oblique rotation of the oblique view mirror 100 and the attitude of the top and bottom control of the camera head 5005 to the arm control device.
- next step S510 information on the oblique rotation of the oblique view mirror 100 and the attitude of the top and bottom control of the camera head 5005 is sent from the endoscope unit to the CCU 5039.
- the CCU 5039 sends information on the oblique rotation of the oblique view mirror 100 and the attitude of the top and bottom control of the camera head 5005 to the arm control device.
- the image recognition of the observation object 210 existing inside the human body of the patient is performed, and the position of the observation object 210 coincides with the optical axis of the objective optical system of the oblique endoscope 100.
- the arm is controlled to move the endoscope while restraining the tip of the endoscope on a virtual surface. This makes it possible to capture the observation object 210 such as a surgical instrument or a tumor in the center of the visual field 200 when the oblique vision rotation is performed, and the convenience of the operator is improved.
- the operator can perform the oblique rotation while maintaining the part to be seen, the instrument, etc. constantly in the screen, and it is possible to suppress the observation object 210 from being lost by the oblique rotation.
- each device described in the present specification may be realized using any of software, hardware, and a combination of software and hardware.
- the programs that configure the software are stored in advance in, for example, storage media (non-transitory media) provided inside or outside each device. And each program is read into RAM at the time of execution by a computer, for example, and is executed by a processor such as a CPU.
- An articulated arm in which a plurality of joints are rotatably connected by a plurality of links, and capable of supporting a perspective endoscope at the tip,
- the control system controls an articulated arm that supports the oblique endoscope such that the observation object is positioned at the center of the field of view based on the result of determining the position of the observation object.
- the surgical arm system according to any one of (1) to (5).
- the control system controls, based on a result of image recognition of the observation target, an articulated arm supporting the oblique endoscope such that the observation target is positioned at the center of the field of view.
- the surgical arm system according to 6).
- the holding unit includes the first control unit, The second control unit acquires rotation angle information of the oblique endoscope acquired by the first control unit through an image processing unit connected to the camera head, and the second control unit acquires the rotation angle information based on the rotation angle information.
- the surgical arm system according to (13), which controls an articulated arm.
- the articulated arm is connected so as to be pivotable by a plurality of links, and controls an articulated arm capable of supporting the oblique endoscope at its tip, so as to change the position and posture of the oblique endoscope Surgical arm control system to control
- a surgical arm control system which controls at least one of a rotational speed and a moving speed of the oblique endoscope based on a position of an observation object in the visual field in a field of view imaged through the oblique endoscope.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Optics & Photonics (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Robotics (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Mechanical Engineering (AREA)
- Astronomy & Astrophysics (AREA)
- Multimedia (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Microscoopes, Condenser (AREA)
Abstract
【課題】観察対象物をモニタの視野から見失わないようにする。 【解決手段】複数の関節部が複数のリンクにより回動可能に連結され、先端に斜視鏡を支持可能な多関節アームと、前記斜視鏡の位置及び姿勢を変更するように前記多関節アームを制御する制御システムと、を備え、前記制御システムは、前記斜視鏡を通して撮像される視野内で、前記視野内の前記観察対象物の位置に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、手術アームシステムが提供される。
Description
本開示は、斜視鏡の制御装置及び医療用システムに関する。
従来、例えば下記の特許文献1には、作業時に違和感のないように、内視鏡画像の上下左右方向と作業者の上下左右操作方向とが一致する内視鏡画像をモニタに表示可能とすることを想定した技術が記載されている。
近時においては、人体内部に挿入される硬性鏡として、斜視鏡が用いられるようになっている。しかし、斜視鏡による斜視回転はスコープ軸に対して回るため、単純な水平方向または上下方向の移動に比べて回転後の視野が直感的にわかりにくいという問題がある。そのため、斜視回転によって観察対象物が画面の視野外に出てしまったり、視野に映っていた器具を見失うなどの問題が発生していた。
そこで、観察対象物をモニタ画像の視野から見失わないようにすることが求められていた。
本開示によれば、複数の関節部が複数のリンクにより回動可能に連結され、先端に斜視鏡を支持可能な多関節アームと、前記斜視鏡の位置及び姿勢を変更するように前記多関節アームを制御する制御システムと、を備え、前記制御システムは、前記斜視鏡を通して撮像される視野内で、前記視野内の前記観察対象物の位置に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、手術アームシステムが提供される。
また、本開示によれば、複数の関節部が複数のリンクにより回動可能に連結され、先端に斜視鏡を支持可能な多関節アームを制御し、前記斜視鏡の位置及び姿勢を変更するように前記多関節アームを制御する手術アーム制御システムであって、前記斜視鏡を通して撮像される視野内で、前記視野内の前記観察対象物の位置に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、手術アーム制御システムが提供される。
本開示によれば、観察対象物をモニタ画像の視野から見失わないようにすることが可能となる。
なお、上記の効果は必ずしも限定的なものではなく、上記の効果とともに、または上記の効果に代えて、本明細書に示されたいずれかの効果、または本明細書から把握され得る他の効果が奏されてもよい。
なお、上記の効果は必ずしも限定的なものではなく、上記の効果とともに、または上記の効果に代えて、本明細書に示されたいずれかの効果、または本明細書から把握され得る他の効果が奏されてもよい。
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
なお、説明は以下の順序で行うものとする。
1.基本構成
1.1.内視鏡システムの構成例
1.2.医療用支持アーム装置の具体的構成例
1.3.制御装置の構成例
2.斜視鏡による斜視回転動作と観察対象物への追従動作
2.1.斜視鏡の回転動作
2.2.視野の中心からの距離に応じた斜視回転速度の変更
2.3.観察対象物への追従動作
2.4.斜視回転動作と追従動作のための制御部の構成例
2.5.追従動作の詳細
2.6.追従動作の具体例
3.斜視鏡の回転を独立して制御する保持ユニットを設けた例
4.まとめ
1.基本構成
1.1.内視鏡システムの構成例
1.2.医療用支持アーム装置の具体的構成例
1.3.制御装置の構成例
2.斜視鏡による斜視回転動作と観察対象物への追従動作
2.1.斜視鏡の回転動作
2.2.視野の中心からの距離に応じた斜視回転速度の変更
2.3.観察対象物への追従動作
2.4.斜視回転動作と追従動作のための制御部の構成例
2.5.追従動作の詳細
2.6.追従動作の具体例
3.斜視鏡の回転を独立して制御する保持ユニットを設けた例
4.まとめ
<<1.基本構成>>
まず、図1~図4を参照して、本開示の一実施形態に係る内視鏡システムの基本構成を説明する。
まず、図1~図4を参照して、本開示の一実施形態に係る内視鏡システムの基本構成を説明する。
<1.1.内視鏡システムの構成例>
図1は、本開示に係る技術が適用され得る内視鏡手術システム5000の概略的な構成の一例を示す図である。図1では、術者(医師)5067が、内視鏡手術システム5000を用いて、患者ベッド5069上の患者5071に手術を行っている様子が図示されている。図示するように、内視鏡手術システム5000は、内視鏡5001と、その他の術具5017と、内視鏡5001を支持する支持アーム装置5027と、内視鏡下手術のための各種の装置が搭載されたカート5037と、から構成される。
図1は、本開示に係る技術が適用され得る内視鏡手術システム5000の概略的な構成の一例を示す図である。図1では、術者(医師)5067が、内視鏡手術システム5000を用いて、患者ベッド5069上の患者5071に手術を行っている様子が図示されている。図示するように、内視鏡手術システム5000は、内視鏡5001と、その他の術具5017と、内視鏡5001を支持する支持アーム装置5027と、内視鏡下手術のための各種の装置が搭載されたカート5037と、から構成される。
内視鏡手術では、腹壁を切って開腹する代わりに、トロッカ5025a~5025dと呼ばれる筒状の開孔器具が腹壁に複数穿刺される。そして、トロッカ5025a~5025dから、内視鏡5001の鏡筒5003や、その他の術具5017が患者5071の体腔内に挿入される。図示する例では、その他の術具5017として、気腹チューブ5019、エネルギー処置具5021及び鉗子5023が、患者5071の体腔内に挿入されている。また、エネルギー処置具5021は、高周波電流や超音波振動により、組織の切開及び剥離、又は血管の封止等を行う処置具である。ただし、図示する術具5017はあくまで一例であり、術具5017としては、例えば攝子、レトラクタ等、一般的に内視鏡下手術において用いられる各種の術具が用いられてよい。
内視鏡5001によって撮影された患者5071の体腔内の術部の画像が、表示装置5041に表示される。術者5067は、表示装置5041に表示された術部の画像をリアルタイムで見ながら、エネルギー処置具5021や鉗子5023を用いて、例えば患部を切除する等の処置を行う。なお、図示は省略しているが、気腹チューブ5019、エネルギー処置具5021及び鉗子5023は、手術中に、術者5067又は助手等によって支持される。
(支持アーム装置)
支持アーム装置5027は、ベース部5029から延伸するアーム部5031を備える。図示する例では、アーム部5031は、関節部5033a、5033b、5033c、及びリンク5035a、5035bから構成されており、アーム制御装置5045からの制御により駆動される。アーム部5031によって内視鏡5001が支持され、その位置及び姿勢が制御される。これにより、内視鏡5001の安定的な位置の固定が実現され得る。
支持アーム装置5027は、ベース部5029から延伸するアーム部5031を備える。図示する例では、アーム部5031は、関節部5033a、5033b、5033c、及びリンク5035a、5035bから構成されており、アーム制御装置5045からの制御により駆動される。アーム部5031によって内視鏡5001が支持され、その位置及び姿勢が制御される。これにより、内視鏡5001の安定的な位置の固定が実現され得る。
(内視鏡)
内視鏡5001は、先端から所定の長さの領域が患者5071の体腔内に挿入される鏡筒5003と、鏡筒5003の基端に接続されるカメラヘッド5005と、から構成される。図示する例では、硬性の鏡筒5003を有するいわゆる硬性鏡として構成される内視鏡5001を図示しているが、内視鏡5001は、軟性の鏡筒5003を有するいわゆる軟性鏡として構成されてもよい。
内視鏡5001は、先端から所定の長さの領域が患者5071の体腔内に挿入される鏡筒5003と、鏡筒5003の基端に接続されるカメラヘッド5005と、から構成される。図示する例では、硬性の鏡筒5003を有するいわゆる硬性鏡として構成される内視鏡5001を図示しているが、内視鏡5001は、軟性の鏡筒5003を有するいわゆる軟性鏡として構成されてもよい。
鏡筒5003の先端には、対物レンズが嵌め込まれた開口部が設けられている。内視鏡5001には光源装置5043が接続されており、当該光源装置5043によって生成された光が、鏡筒5003の内部に延設されるライトガイドによって当該鏡筒の先端まで導光され、対物レンズを介して患者5071の体腔内の観察対象に向かって照射される。なお、内視鏡5001は、斜視鏡であるものとする。
カメラヘッド5005の内部には光学系及び撮像素子が設けられており、観察対象からの反射光(観察光)は当該光学系によって当該撮像素子に集光される。当該撮像素子によって観察光が光電変換され、観察光に対応する電気信号、すなわち観察像に対応する画像信号が生成される。当該画像信号は、RAWデータとしてカメラコントロールユニット(CCU:Camera Control Unit)5039に送信される。なお、カメラヘッド5005には、その光学系を適宜駆動させることにより、倍率及び焦点距離を調整する機能が搭載される。
なお、例えば立体視(3D表示)等に対応するために、カメラヘッド5005には撮像素子が複数設けられてもよい。この場合、鏡筒5003の内部には、当該複数の撮像素子のそれぞれに観察光を導光するために、リレー光学系が複数系統設けられる。
(カートに搭載される各種の装置)
CCU5039は、CPU(Central Processing Unit)やGPU(Graphics Processing Unit)等によって構成され、内視鏡5001及び表示装置5041の動作を統括的に制御する。具体的には、CCU5039は、カメラヘッド5005から受け取った画像信号に対して、例えば現像処理(デモザイク処理)等の、当該画像信号に基づく画像を表示するための各種の画像処理を施す。CCU5039は、当該画像処理を施した画像信号を表示装置5041に提供する。また、CCU5039は、カメラヘッド5005に対して制御信号を送信し、その駆動を制御する。当該制御信号には、倍率や焦点距離等、撮像条件に関する情報が含まれ得る。
CCU5039は、CPU(Central Processing Unit)やGPU(Graphics Processing Unit)等によって構成され、内視鏡5001及び表示装置5041の動作を統括的に制御する。具体的には、CCU5039は、カメラヘッド5005から受け取った画像信号に対して、例えば現像処理(デモザイク処理)等の、当該画像信号に基づく画像を表示するための各種の画像処理を施す。CCU5039は、当該画像処理を施した画像信号を表示装置5041に提供する。また、CCU5039は、カメラヘッド5005に対して制御信号を送信し、その駆動を制御する。当該制御信号には、倍率や焦点距離等、撮像条件に関する情報が含まれ得る。
表示装置5041は、CCU5039からの制御により、当該CCU5039によって画像処理が施された画像信号に基づく画像を表示する。内視鏡5001が例えば4K(水平画素数3840×垂直画素数2160)又は8K(水平画素数7680×垂直画素数4320)等の高解像度の撮影に対応したものである場合、及び/又は3D表示に対応したものである場合には、表示装置5041としては、それぞれに対応して、高解像度の表示が可能なもの、及び/又は3D表示可能なものが用いられ得る。4K又は8K等の高解像度の撮影に対応したものである場合、表示装置5041として55インチ以上のサイズのものを用いることで一層の没入感が得られる。また、用途に応じて、解像度、サイズが異なる複数の表示装置5041が設けられてもよい。
光源装置5043は、例えばLED(light emitting diode)等の光源から構成され、術部を撮影する際の照射光を内視鏡5001に供給する。
アーム制御装置5045は、例えばCPU等のプロセッサによって構成され、所定のプログラムに従って動作することにより、所定の制御方式に従って支持アーム装置5027のアーム部5031の駆動を制御する。
入力装置5047は、内視鏡手術システム5000に対する入力インタフェースである。ユーザは、入力装置5047を介して、内視鏡手術システム5000に対して各種の情報の入力や指示入力を行うことができる。例えば、ユーザは、入力装置5047を介して、患者の身体情報や、手術の術式についての情報等、手術に関する各種の情報を入力する。また、例えば、ユーザは、入力装置5047を介して、アーム部5031を駆動させる旨の指示や、内視鏡5001による撮像条件(照射光の種類、倍率及び焦点距離等)を変更する旨の指示、エネルギー処置具5021を駆動させる旨の指示等を入力する。
入力装置5047の種類は限定されず、入力装置5047は各種の公知の入力装置であってよい。入力装置5047としては、例えば、マウス、キーボード、タッチパネル、スイッチ、フットスイッチ5057及び/又はレバー等が適用され得る。入力装置5047としてタッチパネルが用いられる場合には、当該タッチパネルは表示装置5041の表示面上に設けられてもよい。
あるいは、入力装置5047は、例えばメガネ型のウェアラブルデバイスやHMD(Head Mounted Display)等の、ユーザによって装着されるデバイスであり、これらのデバイスによって検出されるユーザのジェスチャや視線に応じて各種の入力が行われる。また、入力装置5047は、ユーザの動きを検出可能なカメラを含み、当該カメラによって撮像された映像から検出されるユーザのジェスチャや視線に応じて各種の入力が行われる。更に、入力装置5047は、ユーザの声を収音可能なマイクロフォンを含み、当該マイクロフォンを介して音声によって各種の入力が行われる。このように、入力装置5047が非接触で各種の情報を入力可能に構成されることにより、特に清潔域に属するユーザ(例えば術者5067)が、不潔域に属する機器を非接触で操作することが可能となる。また、ユーザは、所持している術具から手を離すことなく機器を操作することが可能となるため、ユーザの利便性が向上する。
処置具制御装置5049は、組織の焼灼、切開又は血管の封止等のためのエネルギー処置具5021の駆動を制御する。気腹装置5051は、内視鏡5001による視野の確保及び術者の作業空間の確保の目的で、患者5071の体腔を膨らめるために、気腹チューブ5019を介して当該体腔内にガスを送り込む。レコーダ5053は、手術に関する各種の情報を記録可能な装置である。プリンタ5055は、手術に関する各種の情報を、テキスト、画像又はグラフ等各種の形式で印刷可能な装置である。
以下、内視鏡手術システム5000において特に特徴的な構成について、更に詳細に説明する。
(支持アーム装置)
支持アーム装置5027は、基台であるベース部5029と、ベース部5029から延伸するアーム部5031と、を備える。図示する例では、アーム部5031は、複数の関節部5033a、5033b、5033cと、関節部5033bによって連結される複数のリンク5035a、5035bと、から構成されているが、図1では、簡単のため、アーム部5031の構成を簡略化して図示している。実際には、アーム部5031が所望の自由度を有するように、関節部5033a~5033c及びリンク5035a、5035bの形状、数及び配置、並びに関節部5033a~5033cの回転軸の方向等が適宜設定され得る。例えば、アーム部5031は、好適に、6自由度以上の自由度を有するように構成され得る。これにより、アーム部5031の可動範囲内において内視鏡5001を自由に移動させることが可能になるため、所望の方向から内視鏡5001の鏡筒5003を患者5071の体腔内に挿入することが可能になる。
支持アーム装置5027は、基台であるベース部5029と、ベース部5029から延伸するアーム部5031と、を備える。図示する例では、アーム部5031は、複数の関節部5033a、5033b、5033cと、関節部5033bによって連結される複数のリンク5035a、5035bと、から構成されているが、図1では、簡単のため、アーム部5031の構成を簡略化して図示している。実際には、アーム部5031が所望の自由度を有するように、関節部5033a~5033c及びリンク5035a、5035bの形状、数及び配置、並びに関節部5033a~5033cの回転軸の方向等が適宜設定され得る。例えば、アーム部5031は、好適に、6自由度以上の自由度を有するように構成され得る。これにより、アーム部5031の可動範囲内において内視鏡5001を自由に移動させることが可能になるため、所望の方向から内視鏡5001の鏡筒5003を患者5071の体腔内に挿入することが可能になる。
関節部5033a~5033cにはアクチュエータが設けられており、関節部5033a~5033cは当該アクチュエータの駆動により所定の回転軸まわりに回転可能に構成されている。当該アクチュエータの駆動がアーム制御装置5045によって制御されることにより、各関節部5033a~5033cの回転角度が制御され、アーム部5031の駆動が制御される。これにより、内視鏡5001の位置及び姿勢の制御が実現され得る。この際、アーム制御装置5045は、力制御又は位置制御等、各種の公知の制御方式によってアーム部5031の駆動を制御することができる。
例えば、術者5067が、入力装置5047(フットスイッチ5057を含む)を介して適宜操作入力を行うことにより、当該操作入力に応じてアーム制御装置5045によってアーム部5031の駆動が適宜制御され、内視鏡5001の位置及び姿勢が制御されてよい。当該制御により、アーム部5031の先端の内視鏡5001を任意の位置から任意の位置まで移動させた後、その移動後の位置で固定的に支持することができる。なお、アーム部5031は、いわゆるマスタースレイブ方式で操作されてもよい。この場合、アーム部5031は、手術室から離れた場所に設置される入力装置5047を介してユーザによって遠隔操作され得る。
また、力制御が適用される場合には、アーム制御装置5045は、ユーザからの外力を受け、その外力にならってスムーズにアーム部5031が移動するように、各関節部5033a~5033cのアクチュエータを駆動させる、いわゆるパワーアシスト制御を行ってもよい。これにより、ユーザが直接アーム部5031に触れながらアーム部5031を移動させる際に、比較的軽い力で当該アーム部5031を移動させることができる。従って、より直感的に、より簡易な操作で内視鏡5001を移動させることが可能となり、ユーザの利便性を向上させることができる。
ここで、一般的に、内視鏡下手術では、スコピストと呼ばれる医師によって内視鏡5001が支持されていた。これに対して、支持アーム装置5027を用いることにより、人手によらずに内視鏡5001の位置をより確実に固定することが可能になるため、術部の画像を安定的に得ることができ、手術を円滑に行うことが可能になる。
なお、アーム制御装置5045は必ずしもカート5037に設けられなくてもよい。また、アーム制御装置5045は必ずしも1つの装置でなくてもよい。例えば、アーム制御装置5045は、支持アーム装置5027のアーム部5031の各関節部5033a~5033cにそれぞれ設けられてもよく、複数のアーム制御装置5045が互いに協働することにより、アーム部5031の駆動制御が実現されてもよい。
(光源装置)
光源装置5043は、内視鏡5001に術部を撮影する際の照射光を供給する。光源装置5043は、例えばLED、レーザ光源又はこれらの組み合わせによって構成される白色光源から構成される。このとき、RGBレーザ光源の組み合わせにより白色光源が構成される場合には、各色(各波長)の出力強度及び出力タイミングを高精度に制御することができるため、光源装置5043において撮像画像のホワイトバランスの調整を行うことができる。また、この場合には、RGBレーザ光源それぞれからのレーザ光を時分割で観察対象に照射し、その照射タイミングに同期してカメラヘッド5005の撮像素子の駆動を制御することにより、RGBそれぞれに対応した画像を時分割で撮像することも可能である。当該方法によれば、当該撮像素子にカラーフィルタを設けなくても、カラー画像を得ることができる。
光源装置5043は、内視鏡5001に術部を撮影する際の照射光を供給する。光源装置5043は、例えばLED、レーザ光源又はこれらの組み合わせによって構成される白色光源から構成される。このとき、RGBレーザ光源の組み合わせにより白色光源が構成される場合には、各色(各波長)の出力強度及び出力タイミングを高精度に制御することができるため、光源装置5043において撮像画像のホワイトバランスの調整を行うことができる。また、この場合には、RGBレーザ光源それぞれからのレーザ光を時分割で観察対象に照射し、その照射タイミングに同期してカメラヘッド5005の撮像素子の駆動を制御することにより、RGBそれぞれに対応した画像を時分割で撮像することも可能である。当該方法によれば、当該撮像素子にカラーフィルタを設けなくても、カラー画像を得ることができる。
また、光源装置5043は、出力する光の強度を所定の時間ごとに変更するようにその駆動が制御されてもよい。その光の強度の変更のタイミングに同期してカメラヘッド5005の撮像素子の駆動を制御して時分割で画像を取得し、その画像を合成することにより、いわゆる黒つぶれ及び白とびのない高ダイナミックレンジの画像を生成することができる。
また、光源装置5043は、特殊光観察に対応した所定の波長帯域の光を供給可能に構成されてもよい。特殊光観察では、例えば、体組織における光の吸収の波長依存性を利用して、通常の観察時における照射光(すなわち、白色光)に比べて狭帯域の光を照射することにより、粘膜表層の血管等の所定の組織を高コントラストで撮影する、いわゆる狭帯域光観察(Narrow Band Imaging)が行われる。あるいは、特殊光観察では、励起光を照射することにより発生する蛍光により画像を得る蛍光観察が行われてもよい。蛍光観察では、体組織に励起光を照射し当該体組織からの蛍光を観察するもの(自家蛍光観察)、又はインドシアニングリーン(ICG)等の試薬を体組織に局注するとともに当該体組織にその試薬の蛍光波長に対応した励起光を照射し蛍光像を得るもの等が行われ得る。光源装置5043は、このような特殊光観察に対応した狭帯域光及び/又は励起光を供給可能に構成され得る。
(カメラヘッド及びCCU)
図2を参照して、内視鏡5001のカメラヘッド5005及びCCU5039の機能についてより詳細に説明する。図2は、図1に示すカメラヘッド5005及びCCU5039の機能構成の一例を示すブロック図である。
図2を参照して、内視鏡5001のカメラヘッド5005及びCCU5039の機能についてより詳細に説明する。図2は、図1に示すカメラヘッド5005及びCCU5039の機能構成の一例を示すブロック図である。
図2を参照すると、カメラヘッド5005は、その機能として、レンズユニット5007と、撮像部5009と、駆動部5011と、通信部5013と、カメラヘッド制御部5015と、を有する。また、CCU5039は、その機能として、通信部5059と、画像処理部5061と、制御部5063と、を有する。カメラヘッド5005とCCU5039とは、伝送ケーブル5065によって双方向に通信可能に接続されている。
まず、カメラヘッド5005の機能構成について説明する。レンズユニット5007は、鏡筒5003との接続部に設けられる光学系である。鏡筒5003の先端から取り込まれた観察光は、カメラヘッド5005まで導光され、当該レンズユニット5007に入射する。レンズユニット5007は、ズームレンズ及びフォーカスレンズを含む複数のレンズが組み合わされて構成される。レンズユニット5007は、撮像部5009の撮像素子の受光面上に観察光を集光するように、その光学特性が調整されている。また、ズームレンズ及びフォーカスレンズは、撮像画像の倍率及び焦点の調整のため、その光軸上の位置が移動可能に構成される。
撮像部5009は撮像素子によって構成され、レンズユニット5007の後段に配置される。レンズユニット5007を通過した観察光は、当該撮像素子の受光面に集光され、光電変換によって、観察像に対応した画像信号が生成される。撮像部5009によって生成された画像信号は、通信部5013に提供される。
撮像部5009を構成する撮像素子としては、例えばCMOS(Complementary Metal Oxide Semiconductor)タイプのイメージセンサであり、Bayer配列を有するカラー撮影可能なものが用いられる。なお、当該撮像素子としては、例えば4K以上の高解像度の画像の撮影に対応可能なものが用いられてもよい。術部の画像が高解像度で得られることにより、術者5067は、当該術部の様子をより詳細に把握することができ、手術をより円滑に進行することが可能となる。
また、撮像部5009を構成する撮像素子は、3D表示に対応する右目用及び左目用の画像信号をそれぞれ取得するための1対の撮像素子を有するように構成される。3D表示が行われることにより、術者5067は術部における生体組織の奥行きをより正確に把握することが可能になる。なお、撮像部5009が多板式で構成される場合には、各撮像素子に対応して、レンズユニット5007も複数系統設けられる。
また、撮像部5009は、必ずしもカメラヘッド5005に設けられなくてもよい。例えば、撮像部5009は、鏡筒5003の内部に、対物レンズの直後に設けられてもよい。
駆動部5011は、アクチュエータによって構成され、カメラヘッド制御部5015からの制御により、レンズユニット5007のズームレンズ及びフォーカスレンズを光軸に沿って所定の距離だけ移動させる。これにより、撮像部5009による撮像画像の倍率及び焦点が適宜調整され得る。
通信部5013は、CCU5039との間で各種の情報を送受信するための通信装置によって構成される。通信部5013は、撮像部5009から得た画像信号をRAWデータとして伝送ケーブル5065を介してCCU5039に送信する。この際、術部の撮像画像を低レイテンシで表示するために、当該画像信号は光通信によって送信されることが好ましい。手術の際には、術者5067が撮像画像によって患部の状態を観察しながら手術を行うため、より安全で確実な手術のためには、術部の動画像が可能な限りリアルタイムに表示されることが求められるからである。光通信が行われる場合には、通信部5013には、電気信号を光信号に変換する光電変換モジュールが設けられる。画像信号は当該光電変換モジュールによって光信号に変換された後、伝送ケーブル5065を介してCCU5039に送信される。
また、通信部5013は、CCU5039から、カメラヘッド5005の駆動を制御するための制御信号を受信する。当該制御信号には、例えば、撮像画像のフレームレートを指定する旨の情報、撮像時の露出値を指定する旨の情報、並びに/又は撮像画像の倍率及び焦点を指定する旨の情報等、撮像条件に関する情報が含まれる。通信部5013は、受信した制御信号をカメラヘッド制御部5015に提供する。なお、CCU5039からの制御信号も、光通信によって伝送されてもよい。この場合、通信部5013には、光信号を電気信号に変換する光電変換モジュールが設けられ、制御信号は当該光電変換モジュールによって電気信号に変換された後、カメラヘッド制御部5015に提供される。
なお、上記のフレームレートや露出値、倍率、焦点等の撮像条件は、取得された画像信号に基づいてCCU5039の制御部5063によって自動的に設定される。つまり、いわゆるAE(Auto Exposure)機能、AF(Auto Focus)機能及びAWB(Auto White Balance)機能が内視鏡5001に搭載される。
カメラヘッド制御部5015は、通信部5013を介して受信したCCU5039からの制御信号に基づいて、カメラヘッド5005の駆動を制御する。例えば、カメラヘッド制御部5015は、撮像画像のフレームレートを指定する旨の情報及び/又は撮像時の露光を指定する旨の情報に基づいて、撮像部5009の撮像素子の駆動を制御する。また、例えば、カメラヘッド制御部5015は、撮像画像の倍率及び焦点を指定する旨の情報に基づいて、駆動部5011を介してレンズユニット5007のズームレンズ及びフォーカスレンズを適宜移動させる。カメラヘッド制御部5015は、更に、鏡筒5003やカメラヘッド5005を識別するための情報を記憶する機能を備えてもよい。
なお、レンズユニット5007や撮像部5009等の構成を、気密性及び防水性が高い密閉構造内に配置することで、カメラヘッド5005について、オートクレーブ滅菌処理に対する耐性を持たせることができる。
次に、CCU5039の機能構成について説明する。通信部5059は、カメラヘッド5005との間で各種の情報を送受信するための通信装置によって構成される。通信部5059は、カメラヘッド5005から、伝送ケーブル5065を介して送信される画像信号を受信する。この際、上記のように、当該画像信号は好適に光通信によって送信され得る。この場合、光通信に対応して、通信部5059には、光信号を電気信号に変換する光電変換モジュールが設けられる。通信部5059は、電気信号に変換した画像信号を画像処理部5061に提供する。
また、通信部5059は、カメラヘッド5005に対して、カメラヘッド5005の駆動を制御するための制御信号を送信する。当該制御信号も光通信によって送信されてよい。
画像処理部5061は、カメラヘッド5005から送信されたRAWデータである画像信号に対して各種の画像処理を施す。当該画像処理としては、例えば現像処理、高画質化処理(帯域強調処理、超解像処理、NR(Noise reduction)処理及び/又は手ブレ補正処理等)、並びに/又は拡大処理(電子ズーム処理)等、各種の公知の信号処理が含まれる。また、画像処理部5061は、AE、AF及びAWBを行うための、画像信号に対する検波処理を行う。
画像処理部5061は、CPUやGPU等のプロセッサによって構成され、当該プロセッサが所定のプログラムに従って動作することにより、上述した画像処理や検波処理が行われ得る。なお、画像処理部5061が複数のGPUによって構成される場合には、画像処理部5061は、画像信号に係る情報を適宜分割し、これら複数のGPUによって並列的に画像処理を行う。
制御部5063は、内視鏡5001による術部の撮像、及びその撮像画像の表示に関する各種の制御を行う。例えば、制御部5063は、カメラヘッド5005の駆動を制御するための制御信号を生成する。この際、撮像条件がユーザによって入力されている場合には、制御部5063は、当該ユーザによる入力に基づいて制御信号を生成する。あるいは、内視鏡5001にAE機能、AF機能及びAWB機能が搭載されている場合には、制御部5063は、画像処理部5061による検波処理の結果に応じて、最適な露出値、焦点距離及びホワイトバランスを適宜算出し、制御信号を生成する。
また、制御部5063は、画像処理部5061によって画像処理が施された画像信号に基づいて、術部の画像を表示装置5041に表示させる。この際、制御部5063は、各種の画像認識技術を用いて術部画像内における各種の物体を認識する。例えば、制御部5063は、術部画像に含まれる物体のエッジの形状や色等を検出することにより、鉗子等の術具、特定の生体部位、出血、エネルギー処置具5021使用時のミスト等を認識することができる。制御部5063は、表示装置5041に術部の画像を表示させる際に、その認識結果を用いて、各種の手術支援情報を当該術部の画像に重畳表示させる。手術支援情報が重畳表示され、術者5067に提示されることにより、より安全かつ確実に手術を進めることが可能になる。
カメラヘッド5005及びCCU5039を接続する伝送ケーブル5065は、電気信号の通信に対応した電気信号ケーブル、光通信に対応した光ファイバ、又はこれらの複合ケーブルである。
ここで、図示する例では、伝送ケーブル5065を用いて有線で通信が行われていたが、カメラヘッド5005とCCU5039との間の通信は無線で行われてもよい。両者の間の通信が無線で行われる場合には、伝送ケーブル5065を手術室内に敷設する必要がなくなるため、手術室内における医療スタッフの移動が当該伝送ケーブル5065によって妨げられる事態が解消され得る。
以上、本開示に係る技術が適用され得る内視鏡手術システム5000の一例について説明した。なお、ここでは、一例として内視鏡手術システム5000について説明したが、本開示に係る技術が適用され得るシステムはかかる例に限定されない。例えば、本開示に係る技術は、検査用軟性内視鏡システムや顕微鏡手術システムに適用されてもよい。
<1.2.医療用支持アーム装置の具体的構成例>
次に、本開示の実施の形態に係る医療用支持アーム装置の具体的構成例について詳細に説明する。以下に説明する支持アーム装置は、アーム部の先端に内視鏡を支持する支持アーム装置として構成された例であるが、本実施形態は係る例に限定されない。
次に、本開示の実施の形態に係る医療用支持アーム装置の具体的構成例について詳細に説明する。以下に説明する支持アーム装置は、アーム部の先端に内視鏡を支持する支持アーム装置として構成された例であるが、本実施形態は係る例に限定されない。
まず、図3を参照して、本実施形態に係る支持アーム装置1400の概略構成について説明する。図3は、本実施形態に係る支持アーム装置1400の外観を示す概略図である。
本実施形態に係る支持アーム装置1400は、ベース部1410及びアーム部1420を備える。ベース部1410は支持アーム装置1400の基台であり、ベース部1410からアーム部1420が延伸される。また、図3には図示しないが、ベース部1410内には、支持アーム装置1400を統合的に制御する制御部が設けられてもよく、アーム部1420の駆動が当該制御部によって制御されてもよい。当該制御部は、例えばCPUやDSP等の各種の信号処理回路によって構成される。
アーム部1420は、複数の能動関節部1421a~1421fと、複数のリンク1422a~1422fと、アーム部1420の先端に設けられた先端ユニットとしての内視鏡装置423とを有する。
リンク1422a~1422fは略棒状の部材である。リンク1422aの一端が能動関節部1421aを介してベース部1410と連結され、リンク1422aの他端が能動関節部1421bを介してリンク1422bの一端と連結され、さらに、リンク1422bの他端が能動関節部1421cを介してリンク1422cの一端と連結される。リンク1422cの他端は受動スライド機構1100を介してリンク1422dに連結され、さらに、リンク1422dの他端は受動関節部200を介してリンク1422eの一端と連結される。リンク1422eの他端は能動関節部1421d,1421eを介してリンク1422fの一端と連結される。内視鏡装置1423は、アーム部1420の先端、すなわち、リンク1422fの他端に、能動関節部1421fを介して連結される。このように、ベース部1410を支点として、複数のリンク1422a~1422fの端同士が、能動関節部1421a~1421f、受動スライド機構1100及び受動関節部1200によって互いに連結されることにより、ベース部1410から延伸されるアーム形状が構成される。
かかるアーム部1420のそれぞれの能動関節部1421a~1421fに設けられたアクチュエータが駆動制御されることにより、内視鏡装置1423の位置及び姿勢が制御される。本実施形態において、内視鏡装置1423は、その先端が施術部位である患者の体腔内に進入して施術部位の一部領域を撮影する。ただし、アーム部1420の先端に設けられる先端ユニットは内視鏡装置1423に限定されず、アーム部1420の先端には先端ユニットとして各種の医療用器具が接続されてよい。このように、本実施形態に係る支持アーム装置1400は、医療用器具を備えた医療用支持アーム装置として構成される。
ここで、以下では、図3に示すように座標軸を定義して支持アーム装置1400の説明を行う。また、座標軸に合わせて、上下方向、前後方向、左右方向を定義する。すなわち、床面に設置されているベース部1410に対する上下方向をz軸方向及び上下方向と定義する。また、z軸と互いに直交する方向であって、ベース部1410からアーム部1420が延伸されている方向(すなわち、ベース部1410に対して内視鏡装置1423が位置している方向)をy軸方向及び前後方向と定義する。さらに、y軸及びz軸と互いに直交する方向をx軸方向及び左右方向と定義する。
能動関節部1421a~1421fはリンク同士を互いに回動可能に連結する。能動関節部1421a~1421fはアクチュエータを有し、当該アクチュエータの駆動により所定の回転軸に対して回転駆動される回転機構を有する。各能動関節部1421a~1421fにおける回転駆動をそれぞれ制御することにより、例えばアーム部1420を伸ばしたり、縮めたり(折り畳んだり)といった、アーム部1420の駆動を制御することができる。ここで、能動関節部1421a~1421fは、例えば公知の全身協調制御及び理想関節制御によってその駆動が制御され得る。上述したように、能動関節部1421a~1421fは回転機構を有するため、以下の説明において、能動関節部1421a~1421fの駆動制御とは、具体的には、能動関節部1421a~1421fの回転角度及び/又は発生トルク(能動関節部1421a~1421fが発生させるトルク)が制御されることを意味する。
受動スライド機構1100は、受動形態変更機構の一態様であり、リンク1422cとリンク1422dとを所定方向に沿って互いに進退動可能に連結する。例えば受動スライド機構1100は、リンク1422cとリンク1422dとを互いに直動可能に連結してもよい。ただし、リンク1422cとリンク1422dとの進退運動は直線運動に限られず、円弧状を成す方向への進退運動であってもよい。受動スライド機構1100は、例えばユーザによって進退動の操作が行われ、リンク1422cの一端側の能動関節部1421cと受動関節部1200との間の距離を可変とする。これにより、アーム部1420の全体の形態が変化し得る。受動スライド機構1100の構成の詳細は後述する。
受動関節部1200は、受動形態変更機構の一態様であり、リンク1422dとリンク1422eとを互いに回動可能に連結する。受動関節部1200は、例えばユーザによって回動の操作が行われ、リンク1422dとリンク1422eとの成す角度を可変とする。これにより、アーム部1420の全体の形態が変化し得る。受動関節部1200の構成の詳細は後述する。
なお、本明細書において、「アーム部の姿勢」とは、一つ又は複数のリンクを挟んで隣り合う能動関節部同士の間の距離が一定の状態で、制御部による能動関節部1421a~1421fに設けられたアクチュエータの駆動制御によって変化し得るアーム部の状態をいう。また、「アーム部の形態」とは、受動形態変更機構が操作されることに伴って、リンクを挟んで隣り合う能動関節部同士の間の距離や、隣り合う能動関節部の間をつなぐリンク同士の成す角度が変わることで変化し得るアーム部の状態をいう。
本実施形態に係る支持アーム装置1400は、6つの能動関節部1421a~1421fを有し、アーム部1420の駆動に関して6自由度が実現されている。つまり、支持アーム装置1400の駆動制御は制御部による6つの能動関節部1421a~1421fの駆動制御により実現される一方、受動スライド機構1100及び受動関節部1200は、制御部による駆動制御の対象とはなっていない。
具体的には、図3に示すように、能動関節部1421a,1421d,1421fは、接続されている各リンク1422a,1422eの長軸方向及び接続されている内視鏡装置1423の撮影方向を回転軸方向とするように設けられている。能動関節部1421b,1421c,1421eは、接続されている各リンク1422a~1422c,1422e,1422f及び内視鏡装置423の連結角度をy-z平面(y軸とz軸とで規定される平面)内において変更する方向であるx軸方向を回転軸方向とするように設けられている。このように、本実施形態においては、能動関節部1421a,1421d,1421fは、いわゆるヨーイングを行う機能を有し、能動関節部1421b,1421c,1421eは、いわゆるピッチングを行う機能を有する。
このようなアーム部1420の構成を有することにより、本実施形態に係る支持アーム装置1400ではアーム部1420の駆動に対して6自由度が実現されるため、アーム部1420の可動範囲内において内視鏡装置1423を自由に移動させることができる。図3では、内視鏡装置1423の移動可能範囲の一例として半球を図示している。半球の中心点RCM(遠隔運動中心)が内視鏡装置1423によって撮影される施術部位の撮影中心であるとすれば、内視鏡装置1423の撮影中心を半球の中心点に固定した状態で、内視鏡装置1423を半球の球面上で移動させることにより、施術部位を様々な角度から撮影することができる。
また、アーム部1420は、上記の自由度に加え、リンク1422fと同軸上で内視鏡装置1423を回転させる1421gの自由度を有していても良い。これにより、リンク1422fの長手軸を回転軸として内視鏡装置1423を回転させることが可能となる。
<1.3.制御装置の構成例>>
ここまで、本実施形態に係る支持アーム装置1400の構成について説明した。以下、本実施形態に係る支持アーム装置1400におけるアーム部1420の駆動制御、すなわち、能動関節部1421a~1421fに設けられたアクチュエータ1430の回転駆動を制御するための制御装置の構成例について説明する。
ここまで、本実施形態に係る支持アーム装置1400の構成について説明した。以下、本実施形態に係る支持アーム装置1400におけるアーム部1420の駆動制御、すなわち、能動関節部1421a~1421fに設けられたアクチュエータ1430の回転駆動を制御するための制御装置の構成例について説明する。
図4は、制御装置1350を含む支持アーム装置1400の全体構成例を示すブロック図である。制御装置1350は、制御部1351と記憶部1357と入力部1359とを備える。
制御部1351は、例えばCPUやDSP等の各種の信号処理回路によって構成される。制御部1351は、制御装置1350を統合的に制御するとともに、支持アーム装置1400におけるアーム部1420の駆動を制御するための各種の演算を行う。具体的に、制御部1351は、全身協調制御部1353と理想関節制御部1355とを有する。全身協調制御部1353は、支持アーム装置1400のアーム部1420の能動関節部1421a~1421fに設けられたアクチュエータ1430を駆動制御するために、全身協調制御における各種の演算を行う。理想関節制御部1355は、外乱の影響を補正することにより全身協調制御に対する理想的な応答を実現する理想関節制御における各種の演算を行う。記憶部1357は、例えばRAM(Random Access Memory)やROM(Read Only Memory)等の記憶素子であってもよく、あるいは、半導体メモリ、ハードディスク、外付けの記憶装置であってよい。
入力部359は、ユーザが制御部351に対して支持アーム装置400の駆動制御に関する情報や命令等を入力するための入力インタフェースである。入力部359は、例えばレバー、ペダル等のユーザが操作する操作手段を有し、当該レバー、ペダル等の操作に応じて、アーム部420の各構成部材の位置や速度等が、瞬時的な運動目的として設定されてもよい。かかる入力部359は、例えばレバーやペダルの他、マウス、キーボード、タッチパネル、ボタン及びスイッチ等のユーザが操作する操作手段を有してもよい。
また、制御装置1350により制御されるアーム部1420は、能動関節部1421を備える。能動関節部1421(1421a~1421f)は、リンク1422a~1422f及び内視鏡装置1423を接続又は支持するための支持部材等、アーム部1420の駆動に必要な各種の構成を有する。ここまでの説明及び以下の説明において、アーム部1420の関節部の駆動とは、能動関節部1421a~1421fにおけるアクチュエータ430の駆動を意味していてもよい。
能動関節部1421は、トルクセンサ1428、エンコーダ1427及びアクチュエータ1430を備える。なお、図4では、アクチュエータ1430とエンコーダ1427及びトルクセンサ1428とが分離して図示されているが、エンコーダ1427及びトルクセンサ1428はアクチュエータ1430に含まれて構成されてもよい。
アクチュエータ1430は、モータと、モータドライバと、減速機と、から構成される。アクチュエータ1430は、例えば力制御に対応するアクチュエータである。アクチュエータ1430では、モータの回転が減速機によって所定の減速比で減速され、出力軸を介して後段の他の部材に伝達されることにより、当該他の部材が駆動されることとなる。
モータは、回転駆動力を生み出す駆動機構である。モータは、モータドライバからの制御により、制御部からのトルク指令値に対応するトルクを発生するように駆動される。モータとしては、例えばブラシレスモータが用いられる。ただし、本実施形態はかかる例に限定されず、モータとしては各種の公知の種類のモータが用いられてよい。
モータドライバは、モータに電流を供給することによりモータを回転駆動させるドライバ回路(ドライバIC(Integrated Circuit))であり、モータに供給する電流量を調整することにより、モータの回転数を制御することができる。モータドライバは、制御部からのトルク指令値τに対応する電流をモータに供給することにより、当該モータを駆動させる。
また、モータドライバは、モータに供給する電流量を調整することにより、アクチュエータ1430の回転運動における粘性抵抗係数を調整することができる。これにより、アクチュエータ1430における回転運動、すなわち、能動関節部1421a~1421fにおける回転運動に対して、所定の抵抗を負荷することが可能となる。例えば、能動関節部1421a~1421fを、外部から加えられる力に対して回転しやすい状態(すなわち、アーム部1420を手動で移動しやすい状態)にすることもできるし、逆に、外部から加えられる力に対して回転し難い状態(すなわち、アーム部1420を手動で移動し難い状態)にすることもできる。
モータの回転軸(駆動軸)には、減速機が連結される。減速機は、連結されたモータの回転軸の回転速度(すなわち、入力軸の回転速度)を、所定の減速比で減速させて出力軸に伝達する。本実施形態では、減速機の構成は特定のものに限定されず、減速機としては各種の公知の種類の減速機が用いられてよい。ただし、減速機としては、例えばハーモニックドライブ(登録商標)等の、高精度に減速比が設定可能なものが用いられることが好ましい。また、減速機の減速比は、アクチュエータ1430の用途に応じて適宜設定され得る。例えば、本実施形態のように、アクチュエータ1430が支持アーム装置400の能動関節部1421a~1421fに適用される場合であれば、1:100程度の減速比を有する減速機が好適に用いられ得る。
エンコーダ1427は、入力軸の回転角度(すなわち、モータの回転軸の回転角度)を検出する。エンコーダ1427によって検出された入力軸の回転数と、減速機の減速比と、に基づいて、能動関節部1421a~1421fの回転角度、回転角速度及び回転角加速度等の情報を得ることができる。エンコーダ1427としては、例えば磁気式エンコーダ、光学式エンコーダ等の各種の公知のロータリエンコーダが用いられてよい。なお、エンコーダ1427は、アクチュエータ1430の入力軸にのみ設けられてもよいし、減速機よりも後段に、アクチュエータ1430の出力軸の回転角度等を検出するためのエンコーダが更に設けられてもよい。
トルクセンサ1428は、アクチュエータ1430の出力軸に接続され、アクチュエータ1430に作用するトルクを検出する。トルクセンサ1428は、アクチュエータ1430によって出力されるトルク(発生トルク)を検出する。また、トルクセンサ1428は、アクチュエータ1430に外部から加えられる外トルクも検出することができる。
以上、能動関節部1421の構成について説明した。ここで、本実施形態では、アーム部1420の動作が力制御によって制御される。当該力制御においては、支持アーム装置1400では、各アクチュエータ1430に設けられたエンコーダ1427及びトルクセンサ1428によって、各能動関節部1421a~1421fの回転角度、及び各能動関節部1421a~1421fに作用するトルクがそれぞれ検出される。このとき、トルクセンサ1428によって検出される各能動関節部1421a~1421fに作用するトルクには、アーム部1420及び/又は内視鏡装置1423に作用する力も含まれ得る。
また、エンコーダ1427によって検出された回転角度、及びトルクセンサ1428によって検出されたトルク値に基づいて、現在のアーム部1420の状態(位置、速度等)が取得され得る。支持アーム装置1400では、取得されたアーム部1420の状態(アーム状態)に基づいて、アーム部1420が所望の運動目的を実行するために必要な、各能動関節部1421a~1421fに設けられたアクチュエータ1430が発生すべきトルクが算出され、当該トルクを制御値として各能動関節部1421a~1421fのアクチュエータ1430が駆動されることになる。
なお、アクチュエータ1430としては、一般的に力制御によってその動作が制御される各種の装置において用いられている、各種の公知のアクチュエータを用いることができる。例えば、アクチュエータ1430としては、本願出願人による先行特許出願である特開2009-269102号公報や特開2011-209099号公報等に記載のものを好適に用いることができる。
本実施形態に係る支持アーム装置1400において、アクチュエータ1430、及びアクチュエータを構成する各部品の構成は上記の構成に限定されず、他の構成であってもよい。
以上、内視鏡システムの基本構成を説明した。以下では、上記説明した内視鏡システムの具体的な実施形態を説明する。
<<2.斜視鏡による斜視回転動作と観察対象物への追従動作>>
<2.1.斜視鏡の回転動作>
本実施形態では、上述した内視鏡5001(内視鏡装置423)として、斜視鏡を用いる。図5は、斜視鏡100の外観を示す模式図である。斜視鏡100では、対物レンズの被写体への向き(C1)は、斜視鏡100の長手方向(スコープ軸C2)に対して所定の角度φを有している。つまり、斜視鏡100では、スコープの接眼光学系に対して対物光学系が角度を成している。斜視鏡100では、観察のために斜視鏡100をスコープ軸C2を回転軸として回転(以下、斜視回転という)させる動作が行われる。斜視回転を行うことで、回り込んだ視野や上下左右の周辺視野を得ることが可能である。
<2.1.斜視鏡の回転動作>
本実施形態では、上述した内視鏡5001(内視鏡装置423)として、斜視鏡を用いる。図5は、斜視鏡100の外観を示す模式図である。斜視鏡100では、対物レンズの被写体への向き(C1)は、斜視鏡100の長手方向(スコープ軸C2)に対して所定の角度φを有している。つまり、斜視鏡100では、スコープの接眼光学系に対して対物光学系が角度を成している。斜視鏡100では、観察のために斜視鏡100をスコープ軸C2を回転軸として回転(以下、斜視回転という)させる動作が行われる。斜視回転を行うことで、回り込んだ視野や上下左右の周辺視野を得ることが可能である。
図6は、斜視回転によって表示装置5041に表示された視野200が変わる様子を示す模式図である。図6に示すように、視野200がモニタに表示されている状態で、斜視回転角αだけ斜視鏡を斜視回転し、視野200の天地方向を制御すると、モニタに表示される視野は、視野200から視野200’に変化する。従って、斜視回転およびカメラの天地方向の2軸を制御することで、上下左右の周辺視野を得ることができる。
図7は、斜視回転によってモニタに映し出される視野が変化する様子を示す模式図である。図7は、斜視鏡で体内を観察する様子を示しており、様々な臓器215の中にユーザ(術者)が見ようとする観察対象物210が存在する状態を示している。図7では、モニタの視野200を矩形領域で示し、視野200とともに、ユーザ(術者)が見ようとする観察対象物210とスコープ軸C2を示している。また、図7では、術者が鉗子などの術具220を観察対象物210に接触させ、観察対象物210を把持等している様子を示している。
図7に示すように、観察対象物210は、スコープ軸C2の位置に対して視野200の下側(術具220を操作する術者側)に位置している。図7では、スコープ軸C2を中心として斜視鏡100を回転させた場合に、視野200に対して観察対象物210が移動する様子を示している。
図7に示す「斜視下」の図では、斜視鏡100対物光学系の光軸を視野200の上下方向で下側に向けた状態を示している。この場合、視野200の中に観察対象物210が入り、術者はモニタ上で観察対象物210を視認することができる。
図7に示す「斜視右」の図では、斜視鏡100対物光学系の光軸を視野200の左右方向で右側に向けた状態を示している。この場合、視野200から観察対象物210が外れ、術者はモニタ上で観察対象物210を視認することができなくなる。
図7に示す「斜視上」の図では、斜視鏡100の対物光学系の光軸を視野200の上下方向で上側に向けた状態を示している。また、図7に示す「斜視左」の図では、斜視鏡100対物光学系の光軸を視野200の左右方向で左側に向けた状態を示している。これらの場合も、視野200から観察対象物210が外れ、術者はモニタ上で観察対象物210を視認することができなくなる。
以上のように、斜視鏡100では、斜視回転を行うことで、観察対象物210に対する視野の位置を変化させることができ、スコープ軸C2の周辺の比較的広い範囲を視認できる。一方、図7に示したように、斜視回転によってユーザが見たい部分や器具がモニタの視野200から外れてしまい、それらの場所を見失ってしまう可能性がある。
このため、本実施形態では、観察対象物210の位置を検出して、観察対象物210が画面中央に移動するようにアームを制御する。また、本実施形態では、視野200に対する観察対象物210の位置に応じて斜視回転の際の回転速度を変更する。具体的に、視野200の中心から観察対象物210が離れるほど、斜視回転の際の回転速度が遅くなるように制御が行われる。視野200の中心から観察対象物210が離れるほど、斜視回転を行った際に観察対象物210が視野200から外れやすくなる。このため、視野200の中心から観察対象物210が離れるほど、斜視回転の際の回転速度を遅くすることで、観察対象物210が視野200から外れにくくなり、観察対象物210の位置を見失ってしまうことが抑制されることになる。但し、追従機能と斜視回転の速度は異なるため、追従のために画面を上下左右方向に動かす自由度の移動速度と、斜視回転の速度を協調させて制御しないと、画面外に外れてしまう可能性がある。このため、観察対象物210が画面中央に来るように制御しつつ、画面中央から対象物21までの距離L、若しくは相対位置に応じて、斜視回転の速度を減速するように制御する。
<2.2.視野の中心からの距離に応じた斜視回転速度の変更>
ここでは、視野200の中心から観察対象物210までの距離に応じた斜視回転速度の変更について説明する。図8は、視野200の中心から観察対象物210までの距離を算出する手法を示す模式図である。図8に示すように、斜視回転速度をω[rad/s]、画面中央Oから観察対象物210の位置pまでのピクセル数を(x,y)[pixels]としたとき、画面中央から観察対象物210の位置までのピクセル数lは、l=√(x2+y2)で得られる。ここから斜視回転速度ω=f(l)の関数で調整することで実現する。例えば画面中央から対角の画面頂点までのピクセル数をlmax[pixels]、斜視回転速度の最高速をωmaxとしたとき、
ω=ωmax*(lmax-l)=ωmax*(lmax-√(x2+y2))
とする。
これにより、観察対象物210の位置が画面中央のときω=ωmax、観察対象物210の位置が対角の画面頂点のときω=0という形で調整される。この例では、線形な計算としているが、高次の関数等を使用してもよい。また、カメラから被写体までの距離Z[mm]、画角θが既知であれば、画面中央から観察対象物210までの距離L[mm]を計算して、ω=f(L)としてもよい。
ここでは、視野200の中心から観察対象物210までの距離に応じた斜視回転速度の変更について説明する。図8は、視野200の中心から観察対象物210までの距離を算出する手法を示す模式図である。図8に示すように、斜視回転速度をω[rad/s]、画面中央Oから観察対象物210の位置pまでのピクセル数を(x,y)[pixels]としたとき、画面中央から観察対象物210の位置までのピクセル数lは、l=√(x2+y2)で得られる。ここから斜視回転速度ω=f(l)の関数で調整することで実現する。例えば画面中央から対角の画面頂点までのピクセル数をlmax[pixels]、斜視回転速度の最高速をωmaxとしたとき、
ω=ωmax*(lmax-l)=ωmax*(lmax-√(x2+y2))
とする。
これにより、観察対象物210の位置が画面中央のときω=ωmax、観察対象物210の位置が対角の画面頂点のときω=0という形で調整される。この例では、線形な計算としているが、高次の関数等を使用してもよい。また、カメラから被写体までの距離Z[mm]、画角θが既知であれば、画面中央から観察対象物210までの距離L[mm]を計算して、ω=f(L)としてもよい。
図9は、画面内の被写体位置に応じて斜視回転の速度を規定するマップの例を示す模式図である。マップ400は、図8に基づき、画面中央Oからの距離が大きくなるほど斜視回転の速度を小さくする例を示している。マップ400のドットの濃さは斜視回転の速度に対応しており、マップ410は、マップ400におけるドットの濃さと斜視回転の速度との関係を示している。マップ410に示すように、ドットの濃度が濃くなるほど、斜視回転の速度は速くなる。従って、マップ400において、画面中央Oからの距離が大きくなるほど斜視回転の速度は低下する。
また、ドットの濃さと、斜視回転の速度及び被写体(観察対象物210)との距離との関係を示している。マップ420によれば、被写体との距離が近いほど斜視回転の速度は低くなる。被写体との距離が近い程、斜視鏡100の動きに応じて視野200内で観察対象物210の動く量が増大するため、被写体との距離が近いほど斜視回転の速度を低下させることで、視野200から観察対象物210を見失うことを抑制できる。
図10は、画面中央Oから観察対象物210までの距離(横軸)と、斜視回転速度(縦軸)との関係を示す特性図である。上述したように画面中央Oから観察対象物210までの距離が大きくなるほど、斜視回転の速度が低下するように制御が行われるが、制御の手法として図10に示すようなバリエーションが想定できる。
図10に示す特性1の場合、斜視回転の速度を優先して制御が行われる。アームのXY方向の移動が十分速い場合は、このような特性でも観察対象物210への追従は可能である。画面端(Lmax)でも斜視鏡回転速度は0ではないため、斜視回転開始時の観察対象物210の位置によっては観察対象物210が画面から外れることもあり得る。
図10に示す特性2、特性3の場合、アームのXY移動の速度が斜視回転による視野の展開よりも遅いケースを想定している。観察対象物210が画面中央Oに近い時には斜視回転を速く行い、画面端(Lmax)でも斜視鏡回転速度は0ではない。観察対象物210が画面中央Oから一定距離以上離れたときも速度を持つため、斜視回転開始時の観察対象物210の位置によっては観察対象物210が画面から外れることもあり得る。
また、図10に示す特性4の場合は、XY移動がかなり遅い場合で、観察対象物210を絶対に視野200からはずさないケースを想定している。観察対象物210が画面中央Oからある程度外れると、斜視回転を完全に停止してXY移動のみが行われる。
特性1~4のいずれにおいても、斜視回転の最高速とアームのXY移動の速度の関係、観察対象物210が視野200外へ移動することを許容するかどうか、等に応じて特性が変わることなる。
<2.3.観察対象物への追従動作>
[観察対象物を画面中央に移動させるアームの動かし方]
図11は、斜視鏡100の長軸中心の回転(斜視回転)により対物光学系の光軸の向きが変化する様子を示している。図10に示すように、斜視回転によって術者が見る方向を変えることが可能であるが、図7で説明したように視野も移動してしまう。一方、図12は、トロッカ点中心の光学軸の回転やそれに近い動きを与えることで、XY方向の移動を行った場合を示している。なお、トロッカ点とは、トロッカが人体に挿入される位置をいうものとする。図12に示すように、トロッカ点を中心として斜視鏡100に回転の動き(斜視鏡ピボットの動き)を加えると、視野を外さずに斜視回転角を変えることができる。このような動きを行う場合は、斜視回転角とXY移動を連動させて動かす。
<2.3.観察対象物への追従動作>
[観察対象物を画面中央に移動させるアームの動かし方]
図11は、斜視鏡100の長軸中心の回転(斜視回転)により対物光学系の光軸の向きが変化する様子を示している。図10に示すように、斜視回転によって術者が見る方向を変えることが可能であるが、図7で説明したように視野も移動してしまう。一方、図12は、トロッカ点中心の光学軸の回転やそれに近い動きを与えることで、XY方向の移動を行った場合を示している。なお、トロッカ点とは、トロッカが人体に挿入される位置をいうものとする。図12に示すように、トロッカ点を中心として斜視鏡100に回転の動き(斜視鏡ピボットの動き)を加えると、視野を外さずに斜視回転角を変えることができる。このような動きを行う場合は、斜視回転角とXY移動を連動させて動かす。
以下では、斜視鏡100の斜視回転と併用する、視野に対する斜視鏡100の動き方の例について説明する。図13は、斜視鏡の姿勢を変えない平行移動の例を示しており、平行移動の動きとともに、斜視回転を行う場合を示す模式図である。この場合、カメラ視野に対する斜視鏡100の姿勢を変えずに移動が行われる。
斜視角α(Y軸周り)、斜視回転角ψ(Z軸周り)、硬性鏡長さL、観察対象物までの距離R、視野中央の点V、平行移動の量(ax, ay, az)としたとき、平行移動を表す同時変換行列は以下になる。

また、斜視角と斜視回転角の同時変換行列は以下のように表すことができる。なお、硬性鏡根元の初期位置は簡易化のため(0,0,0)の原点とする

この時、視野中央の点Vは以下のようになる。

以上のこの式から明らかなように、硬性鏡を平行移動させるのと同じ移動量だけ視野が移動することができる。逆にVを一定に保つようにψの値に応じたax, ayを制御することで図13のように斜視回転をさせつつ対象点を見続けることができる。さらに(Rcosψα, Rsinψsinα)の変化量よりもVの位置を一定位置に保つために動く(ax, ay)の変化量が十分早ければ、斜視鏡の回転によって対象物が視野から外れることがなくなるため、前述のように斜視回転速度を制御すると対象物を画面から見失うことなく斜視を回転することができる。また、(Rcosψα, Rsinψsinα)と (ax, ay)の変化量の相対差が影響するため斜視回転角の速度以外に(ax, ay)の速度を調整することでも同様の動きが実現できる。このような動きは、トロッカ点の拘束がないケースに限定され、例えば、胸部の小開胸/小切開での斜視鏡下手術の場合に相当する。Y方向を動きであるため、視野200とカメラの距離は維持される。
また、図14は、拘束点300を中心とした回転によって視野を上下左右方向に移動する例を示している。拘束点300は、例えばトロッカ点に相当する。この場合、アームの構成としては、拘束点300を中心とした3自由度でも実現可能である。拘束点300を中心とするX軸周りの回転をφ、Y軸周りの回転をθ、とすると、各々の回転行列は以下のようになる。

また、拘束点300を中心とした回転の同時変換行列は以下のようになる。

この時、視野中央の点Vは以下のように表すことができる。

上記のVが保たれるようにθ、φ、ψが調整されれば視野が外れない。目標とする斜視角ψが決まっているとき、Vの値を保つようなθとφの目標値が選ぶ。この目標値を指令値としてθ、φ、ψを制御する際に、前述の斜視回転角の調整を入れることにより、目標値に追従する過程においても視野から対象物を外すことなく制御することが可能となる。
またψの姿勢によってθおよびφの変化に対するVの変化量も変わるため斜視回転角ψの値に応じてXとYの変化量が同じになるようθとφの回転速度を調整してもよい。なお上記計算は計算が煩雑になるため簡易実装のためα=0、ψ=0として斜視回転角に関係なく硬性鏡軸をθ、φで回転させて視野の移動を簡単化してもよい。
[観察対象物を画面中央に移動させるアームの制御]
以下では、拘束点300を中心に斜視鏡100を動かす場合に、観察対象物210が視野200の中央に位置するように追従を行う例について、説明する。画面内の対象物の位置を画像認識等によって認識し、その情報に基づいて観察対象物を画面内で移動するようなアームの制御方法を用いてもよい。また、視線検出によって術者の観察対象点を定め、観察対象点を視野の中央に移動させることもできる。
以下では、拘束点300を中心に斜視鏡100を動かす場合に、観察対象物210が視野200の中央に位置するように追従を行う例について、説明する。画面内の対象物の位置を画像認識等によって認識し、その情報に基づいて観察対象物を画面内で移動するようなアームの制御方法を用いてもよい。また、視線検出によって術者の観察対象点を定め、観察対象点を視野の中央に移動させることもできる。
本実施形態によれば、支持アーム装置に取り付けられて患者の人体内部へ挿入される内視鏡の光軸上に患者の人体内部に存在する対象物が一致するように、支持アーム装置を制御して内視鏡を移動させる制御部、を備える情報処理装置が提供される。画像認識等によって対象物を認識して対象物が画面中心に映るようにアームを制御することで、内視鏡により得られる画像の中心部に手術器具又は腫瘍等の対象物を捉えることが可能となり、術者の利便性が向上する。かかる情報処理装置は、内視鏡手術システム5000と別に構成されてもよいし、内視鏡手術システム5000に含まれる任意の装置として構成されてもよい。
以下、図15及び図16を参照して、本実施形態の概要を説明する。
図15及び図16は、本実施形態の概要を説明するための図である。図15では、患者5071の腹壁に穿刺されたトロッカ5025aから患者5071の体腔内に内視鏡5001の鏡筒5003が挿入された様子が示されている。実線で示された内視鏡5001は、現在の位置姿勢を示しており、破線で示された内視鏡5001は、本実施形態に係る内視鏡制御処理による移動先の(即ち、未来の)位置姿勢を示している。また、患者5071の腹壁に穿刺されたトロッカ5025dから鉗子5023が挿入されている。図16では、図15に示した内視鏡5001により得られる画像(以下、内視鏡映像とも称する)が示されており、左図が現在の位置姿勢で得られる画像であり、右図が本実施形態に係る内視鏡制御処理による移動後に得られる画像である。
図15を参照すると、内視鏡5001の現在の位置姿勢では、鉗子5023の先端が内視鏡5001の視野6052内に捉えられているものの、中心軸(即ち、光軸)6051上にはない。そのため、図16の左図に示すように、中心に鉗子5023の先端が映っていない内視鏡映像が得られることになる。本実施形態に係る内視鏡手術システム5000は、このような状況において、画面中心に鉗子5023等の術具が映るように、内視鏡5001を移動させる処理を行う。詳しくは、内視鏡手術システム5000は、鉗子5023の先端が中心軸6051上に位置するように、図示しない支持アーム装置5027により内視鏡5001を移動させる。これにより、図16の右図に示すように、中心に鉗子5023の先端が映った内視鏡映像が得られることになる。なお、以下では、斜視角および斜視回転角を無視して、鉗子5023の先端を中心軸6051上に位置させる例を示すが、斜視角および斜視回転角を考慮することで、斜視鏡200の制御を行うことができる。また、鉗子5023の先端を中心軸6051上に位置させる例を示すが、観察対象物210を画像認識することにより、観察対象物210をターゲットとして中心軸6051上に位置させる場合ことも同様に行うことができる。
このように、内視鏡手術システム5000は、術具を自動で追従して、術具が画面中心に映った内視鏡映像を提供することが可能となる。よって、術者は、内視鏡5001を操作せずとも、快適に手術を継続することが可能となる。
<2.4.斜視回転動作と追従動作のための制御部の構成例>
図21は、上述した斜視回転動作と追従動作を行うための支持アーム装置1400の制御部1351の構成を示す模式図である。図21に示すように、制御部1351は、観察対象物210を撮像して得られる視野200内で、視野の中心から観察対象物210の位置までの距離を取得する距離取得部1351aと、視野の中心から観察対象物210の位置までの距に基づいて、斜視鏡100の斜視回転の速度又は斜視鏡100の移動速度を算出する速度算出部1351bと、を備える。距離取得部1351aによる視野の中心から観察対象物210の位置までの距離の取得は、CCU5039の制御部5063が観察対象物210を画像認識した結果に基づいて行われる。
図21は、上述した斜視回転動作と追従動作を行うための支持アーム装置1400の制御部1351の構成を示す模式図である。図21に示すように、制御部1351は、観察対象物210を撮像して得られる視野200内で、視野の中心から観察対象物210の位置までの距離を取得する距離取得部1351aと、視野の中心から観察対象物210の位置までの距に基づいて、斜視鏡100の斜視回転の速度又は斜視鏡100の移動速度を算出する速度算出部1351bと、を備える。距離取得部1351aによる視野の中心から観察対象物210の位置までの距離の取得は、CCU5039の制御部5063が観察対象物210を画像認識した結果に基づいて行われる。
また、制御部1351は、CCU5039の制御部5063が観察対象物210を画像認識した結果に基づいて、観察対象物210が視野200の中心に位置するように支持アーム装置1400を制御する。この際、制御部1351は、視野200内の観察対象物210の位置に応じて、斜視鏡100の斜視回転の速度又は斜視鏡100の移動速度の少なくとも一方を制御する。制御部1351は、視野200内の観察対象物210の位置に応じて、斜視鏡100の長軸周りの回転角及び回転速度を制御する。CCU5039の制御部5063は、上述したように、各種の画像認識技術を用いて、観察対象物210の画像の特徴と視野200内での位置を認識することができる。制御部1351は、CCU5039から、観察対象物210の視野200内での位置に関する情報を取得する。
術者は、表示装置5041に表示された術部の画像をリアルタイムで見ながら、入力装置5047を操作することで、表示装置5041に表示された術部から観察対象物210を指定することができる。制御部5063は、指定された観察対象物210に基づいて、観察対象物210の画像の特徴と視野200内での位置を認識する。
<2.5.追従動作の詳細>
続いて、図17を参照して、上述した内視鏡制御を実現する処理を説明する。
続いて、図17を参照して、上述した内視鏡制御を実現する処理を説明する。
図17は、本実施形態に係る内視鏡制御処理の概要を説明するための図である。図17に示した各々のブロックは処理を示しており、内視鏡制御処理は複数の処理から成る。図17に示すように、内視鏡手術システム5000は、画像処理を行って、術具等のターゲットを検出する。次いで、内視鏡手術システム5000は、検出結果に基づいてターゲットの位置を算出する。次に、内視鏡手術システム5000は、算出されたターゲットの位置及びトロッカ位置に基づいて、現在の内視鏡の姿勢を算出する。次いで、内視鏡手術システム5000は、算出した現在の内視鏡の姿勢及び仮想面(平面又は曲面)の設定情報に基づいて、目標となる内視鏡先端位置を算出する。次に、内視鏡手術システム5000は、現在の内視鏡の姿勢と目標となる内視鏡先端位置とに基づいて内視鏡の姿勢の変化量を演算し、演算した変化量に応じた姿勢変化を実現させるためのアームの制御情報(即ち指令)を生成する。そして、内視鏡手術システム5000は、生成した指令に従って動作するよう支持アーム(例えば、アーム部5031)を制御する。内視鏡手術システム5000は、以上説明した一連の処理を繰り返し行う。
以下、本実施形態に係る内視鏡制御処理の詳細を説明する。
(1)はじめに
本実施形態によれば、内視鏡手術システム5000は、内視鏡映像から術具を認識して自動で追従する機能を実現可能である。以下では、画像処理部分(マーカ検出)および検出結果からアームが内視鏡を操作して、トロッカ点を考慮しつつ画面中心に術具がくるように移動させるための計算方法を説明する。
本実施形態によれば、内視鏡手術システム5000は、内視鏡映像から術具を認識して自動で追従する機能を実現可能である。以下では、画像処理部分(マーカ検出)および検出結果からアームが内視鏡を操作して、トロッカ点を考慮しつつ画面中心に術具がくるように移動させるための計算方法を説明する。
以下、機能要件を説明した後、画像処理による術具(マーカー)の検出方法を記載し、そのあとに検出結果から目標となる移動情報と姿勢情報に変換して動作するまでの計算方法を説明する。
ここでは、斜視角および斜視回転角を無視して、拘束点中心にアームを動かした場合の例を示す。
(2)画像処理
内視鏡手術システム5000は、画像処理により術具(例えば、術具の先端位置及び/又は姿勢)を検出する。
内視鏡手術システム5000は、画像処理により術具(例えば、術具の先端位置及び/又は姿勢)を検出する。
例えば、目印となるマーカーを術具先端部に取り付けることで、内視鏡映像に基づく画像処理により術具の位置が検出されてもよい。マーカーは、検出容易であることが望ましい。例えば、マーカーは青又は緑といった、体腔内の臓器や血管の色と比べて目立つ色(例えば、色相環において臓器や血管の色とは反対側に位置する色)であってもよい。また、マーカーは、2次元コード又はバーコード等の特定のパターンであってもよい。
例えば、目印となるマーカーを術具の体外に出ている部分に取り付けることで、外部のセンサによるマーカーの検出結果、術具の長さ及び姿勢等の情報に基づいて術具の位置が検出されてもよい。
なお、術具の検出は、画像処理以外の手法により行われてもよい。
例えば、特別なトロッカを作成することで、術具の挿入量とトロッカの角度とに基づいて術具の位置が算出されてもよい。
例えば、術具を内視鏡とは別の支持アーム装置に取り付けることで、支持アーム装置の位置姿勢情報から術具の位置が算出されてもよい。
(3)目標計算
内視鏡手術システム5000は、目標計算を行う。目標計算は、位置及び姿勢の二つを計算して、移動を指示するための計算である。
内視鏡手術システム5000は、目標計算を行う。目標計算は、位置及び姿勢の二つを計算して、移動を指示するための計算である。
詳しくは、内視鏡手術システム5000は、最初に目標位置を画像処理結果から求めたあと、トロッカ点を起点とした現在の姿勢及び目標位置到達時の姿勢に基づいて、姿勢の変化量を決定する。また、内視鏡手術システム5000は、画像処理の結果から移動量を求める間はエンコーダから取得される現在の位置・姿勢を基に目標計算を行うが、実際の指令を行う場合は、最後に行った指令値に、算出した値を足し合わせて行う。この理由は、現在値と指令値との間に制御誤差に起因するズレが発生していて、指令値を出す場合に現在値を起点にゴールを設定してしまうと動作がスムーズでなくなり、また誤差が大きくなっていく問題が発生するためである。
以下、図18を参照して、目標計算処理の流れの一例を説明する。
図18は、本実施形態に係る内視鏡手術システム5000による目標計算処理の流れの一例を示すフローチャートである。図18に示すように、内視鏡手術システム5000は、まず、座標計算を行う。
座標計算において、内視鏡手術システム5000は、まず、現在値基準で座標を計算する。詳しくは、内視鏡手術システム5000は、画像処理結果を取得する(ステップS402)。次いで、内視鏡手術システム5000は、検出位置をカメラ座標系に変換する(即ち、2Dから3Dへの変換)(ステップS404)。次に、内視鏡手術システム5000は、カメラ座標系からWorld座標系へ変換する(ステップS406)。次いで、内視鏡手術システム5000は、トロッカ点から単位ベクトルへ変換する(ステップS408)。次に、内視鏡手術システム5000は、既定平面(即ち、仮想面)との交点までの長さを求める(ステップS410)。次いで、内視鏡手術システム5000は、トロッカ点から既定平面までのベクトルをWorld座標系へ変換する(ステップS412)。
内視鏡手術システム5000は、現在値基準で座標を計算した後、指令値基準で座標を計算する。詳しくは、内視鏡手術システム5000は、内視鏡の長さを基に挿入深さへ変換する(ステップS414)。
座標計算後、内視鏡手術システム5000は、姿勢計算を行う。
姿勢計算において、内視鏡手術システム5000は、まず、現在値基準で姿勢を計算する。詳しくは、内視鏡手術システム5000は、現在の姿勢ベクトルを取得する(ステップS416)。次いで、内視鏡手術システム5000は、計算した新しい目標ベクトルの姿勢を求める(ステップS418)。次に、内視鏡手術システム5000は、計算した新しい目標ベクトルとの間の相対的な姿勢変化量を求める(ステップS420)。
内視鏡手術システム5000は、現在値基準で姿勢を計算した後、指令値基準で姿勢を計算する。詳しくは、内視鏡手術システム5000は、最終指令値の姿勢からの姿勢変化量に変換する(ステップS422)。
以上説明した処理により、内視鏡手術システム5000は、目標位置及び目標姿勢を得る。
(4)目標位置計算
図19は、本実施形態に係る目標位置計算を説明するための図である。図19に示すように、画像処理結果は、カメラ先端の画面中心を(0.5,0.5)としたカメラ座標系から見た位置が、[0.0-1.0]に正規化された値で通知される。そのままでは無次元の値のため、内視鏡手術システム5000は、最初にメートル単位系に変換する。ただし、内視鏡手術システム5000は、画像処理結果は2Dで奥行き方向の情報がないため、変換の際に奥行きを例えば50[mm]と仮定して、画角と組み合わせて仮想的な位置とする。
図19は、本実施形態に係る目標位置計算を説明するための図である。図19に示すように、画像処理結果は、カメラ先端の画面中心を(0.5,0.5)としたカメラ座標系から見た位置が、[0.0-1.0]に正規化された値で通知される。そのままでは無次元の値のため、内視鏡手術システム5000は、最初にメートル単位系に変換する。ただし、内視鏡手術システム5000は、画像処理結果は2Dで奥行き方向の情報がないため、変換の際に奥行きを例えば50[mm]と仮定して、画角と組み合わせて仮想的な位置とする。
奥行を50[mm]と仮定した理由を説明する。第1の理由は、仮定した値が実際の値より大きいと、(x,y)の移動量が実際の(x,y)より大きくなり、オーバーランする(振動的になる)ためである。第2の理由は、想定術式での撮影距離を50[mm]~100[mm]と設定して、最短の距離としたためである。第3の理由は、実距離のほうが大きい場合、次の画像処理結果で新たに残差から移動が決定されるため、最終的にゴールに到達可能なためである。
(5)目標姿勢計算
内視鏡手術システム5000は、目標位置が決まったあとに目標姿勢を求める。制御部1351は、目標位置及び目標姿勢に基づいて、アーム部これにより、アーム部1420を制御する。
内視鏡手術システム5000は、目標位置が決まったあとに目標姿勢を求める。制御部1351は、目標位置及び目標姿勢に基づいて、アーム部これにより、アーム部1420を制御する。
<2.6.追従動作の具体例>
図20A~図20Dは、本実施形態による斜視鏡の制御により、斜視を左に向けた場合の具体例を説明するための模式図である。図20A~図20Dにおいても、図7と同様に、様々な臓器215の中にユーザ(術者)が見ようとする観察対象物210が存在する状態を示している。ここで、図20Aは、スコープ軸Cの位置に対して対物光学系の光軸が視野200の下側(術具220を操作する術者側)に向いている状態(斜視下の状態)を示している。図20Bは、図20Aの視野200を拡大して示している。この場合に、視野200の左側を見ようとして斜視回転を行うと、図20Cに示すように、観察対象物210への追従動作を行わない既存の技術では、図20Bに比べて斜視回転により観察対象物210の左側が観察できるようになる反面、観察対象物210が見えなくなってしまう。
図20A~図20Dは、本実施形態による斜視鏡の制御により、斜視を左に向けた場合の具体例を説明するための模式図である。図20A~図20Dにおいても、図7と同様に、様々な臓器215の中にユーザ(術者)が見ようとする観察対象物210が存在する状態を示している。ここで、図20Aは、スコープ軸Cの位置に対して対物光学系の光軸が視野200の下側(術具220を操作する術者側)に向いている状態(斜視下の状態)を示している。図20Bは、図20Aの視野200を拡大して示している。この場合に、視野200の左側を見ようとして斜視回転を行うと、図20Cに示すように、観察対象物210への追従動作を行わない既存の技術では、図20Bに比べて斜視回転により観察対象物210の左側が観察できるようになる反面、観察対象物210が見えなくなってしまう。
一方、本実施形態では、図20Dに示すように、観察対象物210が画面中央に位置するように、観察対象物210へ追従するようにアームの制御を行うため、観察対象物210を見失うことなく斜視鏡100を左向きに回転させることが可能である。
<<3.斜視鏡の回転を独立して制御する保持ユニットを設けた例>>
上述した図3に示した構成例では、アーム部1420の能動関節部1421a~1421fの制御のみで斜視鏡100の姿勢と位置を変更する例を示した。一方、アーム部1420の先端に斜視鏡の回転を独立して制御する、アクチュエータ内蔵の保持ユニットが設けられていても良い。この場合、斜視鏡100の回転は保持ユニットで行い、斜視鏡全体の位置や術部に対する姿勢はアームの能動関節部で制御することが可能となる。
上述した図3に示した構成例では、アーム部1420の能動関節部1421a~1421fの制御のみで斜視鏡100の姿勢と位置を変更する例を示した。一方、アーム部1420の先端に斜視鏡の回転を独立して制御する、アクチュエータ内蔵の保持ユニットが設けられていても良い。この場合、斜視鏡100の回転は保持ユニットで行い、斜視鏡全体の位置や術部に対する姿勢はアームの能動関節部で制御することが可能となる。
図22は、図3に示した構成例において、アーム部1420の先端に斜視鏡100の回転とカメラヘッド7100の回転を独立して制御する保持ユニット7000が設けられた構成を示す模式図である。保持ユニット7000は、アーム部1420の先端の内視鏡ユニット取付け部7300に装着され、カメラヘッド取り付け部7100、カメラヘッド回転駆動部7200、斜視鏡取付け部7400、斜視鏡回転駆動部7500を備えている。
図22に示すように、カメラヘッド5005は、カメラヘッド取り付け部7100を介してカメラヘッド回転駆動部7200に装着されている。カメラヘッド回転駆動部7200は、モータなどのアクチュエータ7210を備え、内視鏡ユニット取付け部7300及び保持ユニット7000の本体に対してカメラヘッド5005を回転させる。
また、斜視鏡100は、斜視鏡取付け部7400を介して斜視鏡回転駆動部7500に装着されている。斜視鏡回転駆動部7500は、モータなどのアクチュエータ7510を備え、内視鏡ユニット取付け部7300及び保持ユニット7000の本体に対して斜視鏡100をその軸周りに回転させる。
図23は、図22に示す構成例における、アーム部1420及び制御装置1350を含む支持アーム装置1400と、内視鏡ユニット5006、CCU5039の構成を示す模式図である。制御装置1350は、図4に示した構成に加え、CCU5039との通信を行うCCU通信部1358を備えている。CCU5039は、図2に示した構成に加え、制御装置1350と通信を行うアーム通信部5064を備えている。制御装置1350とCCU5039は、CCU通信部1358とアーム通信部5064が通信を行うことにより、互いに情報の送受信が可能である。また、内視鏡ユニット5006は、図2に示したカメラヘッド5005に保持ユニット7000の機能が追加されたものであり、図2に示した制御部5015の代わりに、内視鏡ユニット制御部5014を備えている。内視鏡ユニット5006は、図2に示したカメラヘッド5005の構成に加え、斜視制御部(第1の制御部)5016、カメラヘッド制御部(第2の制御部)5017、斜視鏡回転駆動部7500、カメラヘッド回転駆動部7200を備えている。斜視制御部5016、カメラヘッド制御部5017は、保持ユニット7000に設けられていても良い。また、内視鏡ユニット制御部5014、斜視制御部5016、カメラヘッド制御部5017の機能は、制御装置1350の制御部1351が備えていても良い。
斜視制御部5016は、内視鏡ユニット制御部5014の指令に基づき、アクチュエータ7510を駆動する。アクチュエータ7510、斜視回転部エンコーダ7520は、斜視鏡回転駆動部7500に設けられている。内視鏡ユニット制御部5014は、斜視回転部エンコーダ7520が検出するアクチュエータ7510の回転角に基づいて、アクチュエータ7510を駆動し、斜視鏡100の軸周りの回転を制御する。
また、カメラヘッド制御部5017は、内視鏡ユニット制御部5014の指令に基づき、アクチュエータ7210を駆動する。アクチュエータ7210、カメラヘッド回転部エンコーダ7220は、カメラヘッド回転駆動部7200に設けられている。内視鏡ユニット制御部5014は、カメラヘッド回転部エンコーダ7220が検出するアクチュエータ7210の回転角に基づいて、カメラヘッド5005の軸周りの回転を制御する。
以上の構成により、内視鏡ユニット取付け部7300に対して、斜視鏡100とカメラヘッド5005が独立して回転することができる。これにより、斜視鏡100を回転させて所望の観察対象物を視認するとともに、カメラヘッド5005を回転させて画像の天地を適正に制御することが可能となる。
図24は、図22及び図23に示す構成において、処理の流れを示すシーケンス図である。先ず、ステップS502では、斜視鏡100の斜視回転とカメラヘッド5005の天地制御の姿勢に関する情報が、内視鏡ユニットからCCU5039に送られる。次のステップS504では、斜視鏡100の斜視回転とカメラヘッド5005の天地制御の姿勢に関する情報が、CCU5039からアーム制御装置に送られる。
次のステップS506では、アーム制御指令および内視鏡ユニットの駆動指令値を算出する。次のステップS508では、内視鏡ユニットの駆動指令値が、駆動指令とともにアーム制御装置からCCU5039に送られる。また、ステップS510では、アーム制御指令に基づいてアームが制御される。
ステップS512では、内視鏡ユニットの駆動指令値が、駆動指令とともにCCU5039から内視鏡ユニットに送られる。次のステップS514では、駆動指令値に基づいて内視鏡ユニットが制御される。
次のステップS516では、斜視鏡100の斜視回転とカメラヘッド5005の天地制御の姿勢に関する情報が、内視鏡ユニットからCCU5039に送られる。次のステップS504では、斜視鏡100の斜視回転とカメラヘッド5005の天地制御の姿勢に関する情報が、CCU5039からアーム制御装置に送られる。
次のステップS510では、
次のステップS510では、
<<4.まとめ>>
以上説明したように本実施形態によれば、モニタの視野200の中央から離れるほど斜視回転の速度を遅くするようにしたため、斜視鏡100の斜視回転を用いて周囲を視認しようとした場合に、観察対象物210が視野200から外れてしまうことを抑制できる。
以上説明したように本実施形態によれば、モニタの視野200の中央から離れるほど斜視回転の速度を遅くするようにしたため、斜視鏡100の斜視回転を用いて周囲を視認しようとした場合に、観察対象物210が視野200から外れてしまうことを抑制できる。
また、本実施形態によれば、患者の人体内部に存在する観察対象物210を画像認識し、斜視鏡100の対物光学系の光軸と観察対象物210の位置が一致するように、医療用アームを制御して内視鏡の先端を仮想面上に拘束しながら内視鏡を移動させる。これにより、斜視回転を行った場合に、視野200の中心部に手術器具又は腫瘍等の観察対象物210を捉えることが可能となり、術者の利便性が向上する。
従って、術者は、見たい部分や器具などが常に画面内に維持されつつ斜視回転を行うことが可能となり、斜視回転で観察対象物210を見失うことを抑制できる。また、被写体を中心としたピボットの動作のように距離情報に基づいた姿勢制御を行わずに簡易的に実現が可能となる。
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
なお、本明細書において説明した各装置による一連の処理は、ソフトウェア、ハードウェア、及びソフトウェアとハードウェアとの組合せのいずれを用いて実現されてもよい。ソフトウェアを構成するプログラムは、例えば、各装置の内部又は外部に設けられる記憶媒体(非一時的な媒体:non-transitory media)に予め格納される。そして、各プログラムは、例えば、コンピュータによる実行時にRAMに読み込まれ、CPUなどのプロセッサにより実行される。
また、本明細書においてフローチャート等を用いて説明した処理は、必ずしも図示された順序で実行されなくてもよい。いくつかの処理ステップは、並列的に実行されてもよい。また、追加的な処理ステップが採用されてもよく、一部の処理ステップが省略されてもよい。
また、本明細書に記載された効果は、あくまで説明的または例示的なものであって限定的ではない。つまり、本開示に係る技術は、上記の効果とともに、または上記の効果に代えて、本明細書の記載から当業者には明らかな他の効果を奏しうる。
なお、以下のような構成も本開示の技術的範囲に属する。
(1) 複数の関節部が複数のリンクにより回動可能に連結され、先端に斜視鏡を支持可能な多関節アームと、
前記斜視鏡の位置及び姿勢を変更するように前記多関節アームを制御する制御システムと、
を備え、
前記制御システムは、前記斜視鏡を通して撮像される視野内で、前記視野内の観察対象物の位置に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、手術アームシステム。
(2) 前記制御システムは、前記斜視鏡の長軸周りの回転角及び回転速度を制御する、前記(1)に記載の手術アームシステム。
(3) 前記制御システムは、前記視野内で前記観察対象物の位置を移動するように前記多関節アームの姿勢と移動速度を制御する、前記(1)又は(2)に記載の手術アームシステム。
(4) 前記制御システムは、前記視野内で、前記視野の中心から前記観察対象物の位置までの距離に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、前記(1)~(3)のいずれかに記載の手術アームシステム。
(5) 前記制御システムは、前記視野の中心から前記観察対象物の位置までの距離が長いほど前記回転速度を遅くする、前記(1)~(4)のいずれかに記載の手術アームシステム。
(6) 前記制御システムは、前記観察対象物の位置を判別した結果に基づいて、前記観察対象物が前記視野の中心に位置するように前記斜視鏡を支持する多関節アームを制御する、前記(1)~(5)のいずれかに記載の手術アームシステム。
(7) 前記制御システムは、前記観察対象物を画像認識した結果に基づいて、前記観察対象物が前記視野の中心に位置するように前記斜視鏡を支持する多関節アームを制御する、前記(6)に記載の手術アームシステム。
(8) 前記制御システムは、前記観察対象物が前記視野の端に位置する場合は、前記回転速度を0にする、前記(1)~(7)のいずれかに記載の手術アームシステム。
(9) 前記制御システムは、前記距離の増加量に対する前記回転速度の減少量が線形の関係になるように前記回転速度を制御する、前記(5)に記載の手術アームシステム。
(10) 前記制御システムは、前記距離が所定範囲内の場合は、前記回転速度を前記中心と前記観察対象物の位置が一致する場合の前記回転速度と同一とする、前記(5)に記載の手術アームシステム。
(11) 前記制御システムは、前記距離が所定範囲を超える場合は、前記回転速度を一定値とする、前記(5)に記載の手術アームシステム。
(12) 前記制御システムは、前記斜視鏡の回転を制御する第1の制御部と前記多関節アームを制御する第2の制御部を備える、前記(1)~(11)のいずれかに記載の手術アームシステム。
(13) 前記多関節アームは、前記斜視鏡とカメラヘッドをそれぞれ独立して回転制御可能に保持する保持ユニットを備える、前記(12)に記載の手術アームシステム。
(14) 前記保持ユニットは前記第1の制御部を含み、
前記第2の制御部は、前記カメラヘッドと接続された画像処理部を介して、前記第1の制御部が取得した前記斜視鏡の回転角情報を取得し、前記回転角情報に基づいて前記多関節アームを制御する、前記(13)に記載の手術アームシステム。
(15) 複数の関節部が複数のリンクにより回動可能に連結され、先端に斜視鏡を支持可能な多関節アームを制御し、前記斜視鏡の位置及び姿勢を変更するように前記多関節アームを制御する手術アーム制御システムであって、
前記斜視鏡を通して撮像される視野内で、前記視野内の観察対象物の位置に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、手術アーム制御システム。
(1) 複数の関節部が複数のリンクにより回動可能に連結され、先端に斜視鏡を支持可能な多関節アームと、
前記斜視鏡の位置及び姿勢を変更するように前記多関節アームを制御する制御システムと、
を備え、
前記制御システムは、前記斜視鏡を通して撮像される視野内で、前記視野内の観察対象物の位置に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、手術アームシステム。
(2) 前記制御システムは、前記斜視鏡の長軸周りの回転角及び回転速度を制御する、前記(1)に記載の手術アームシステム。
(3) 前記制御システムは、前記視野内で前記観察対象物の位置を移動するように前記多関節アームの姿勢と移動速度を制御する、前記(1)又は(2)に記載の手術アームシステム。
(4) 前記制御システムは、前記視野内で、前記視野の中心から前記観察対象物の位置までの距離に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、前記(1)~(3)のいずれかに記載の手術アームシステム。
(5) 前記制御システムは、前記視野の中心から前記観察対象物の位置までの距離が長いほど前記回転速度を遅くする、前記(1)~(4)のいずれかに記載の手術アームシステム。
(6) 前記制御システムは、前記観察対象物の位置を判別した結果に基づいて、前記観察対象物が前記視野の中心に位置するように前記斜視鏡を支持する多関節アームを制御する、前記(1)~(5)のいずれかに記載の手術アームシステム。
(7) 前記制御システムは、前記観察対象物を画像認識した結果に基づいて、前記観察対象物が前記視野の中心に位置するように前記斜視鏡を支持する多関節アームを制御する、前記(6)に記載の手術アームシステム。
(8) 前記制御システムは、前記観察対象物が前記視野の端に位置する場合は、前記回転速度を0にする、前記(1)~(7)のいずれかに記載の手術アームシステム。
(9) 前記制御システムは、前記距離の増加量に対する前記回転速度の減少量が線形の関係になるように前記回転速度を制御する、前記(5)に記載の手術アームシステム。
(10) 前記制御システムは、前記距離が所定範囲内の場合は、前記回転速度を前記中心と前記観察対象物の位置が一致する場合の前記回転速度と同一とする、前記(5)に記載の手術アームシステム。
(11) 前記制御システムは、前記距離が所定範囲を超える場合は、前記回転速度を一定値とする、前記(5)に記載の手術アームシステム。
(12) 前記制御システムは、前記斜視鏡の回転を制御する第1の制御部と前記多関節アームを制御する第2の制御部を備える、前記(1)~(11)のいずれかに記載の手術アームシステム。
(13) 前記多関節アームは、前記斜視鏡とカメラヘッドをそれぞれ独立して回転制御可能に保持する保持ユニットを備える、前記(12)に記載の手術アームシステム。
(14) 前記保持ユニットは前記第1の制御部を含み、
前記第2の制御部は、前記カメラヘッドと接続された画像処理部を介して、前記第1の制御部が取得した前記斜視鏡の回転角情報を取得し、前記回転角情報に基づいて前記多関節アームを制御する、前記(13)に記載の手術アームシステム。
(15) 複数の関節部が複数のリンクにより回動可能に連結され、先端に斜視鏡を支持可能な多関節アームを制御し、前記斜視鏡の位置及び姿勢を変更するように前記多関節アームを制御する手術アーム制御システムであって、
前記斜視鏡を通して撮像される視野内で、前記視野内の観察対象物の位置に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、手術アーム制御システム。
100 斜視鏡
200 視野
210 観察対象物
350 制御装置
351 制御部
351a 距離取得部
351b 速度算出部
400 支持アーム装置
200 視野
210 観察対象物
350 制御装置
351 制御部
351a 距離取得部
351b 速度算出部
400 支持アーム装置
Claims (15)
- 複数の関節部が複数のリンクにより回動可能に連結され、先端に斜視鏡を支持可能な多関節アームと、
前記斜視鏡の位置及び姿勢を変更するように前記多関節アームを制御する制御システムと、
を備え、
前記制御システムは、前記斜視鏡を通して撮像される視野内で、前記視野内の観察対象物の位置に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、手術アームシステム。 - 前記制御システムは、前記斜視鏡の長軸周りの回転角及び回転速度を制御する、請求項1に記載の手術アームシステム。
- 前記制御システムは、前記視野内で前記観察対象物の位置を移動するように前記多関節アームの姿勢と移動速度を制御する、請求項1に記載の手術アームシステム。
- 前記制御システムは、前記視野内で、前記視野の中心から前記観察対象物の位置までの距離に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、請求項1に記載の手術アームシステム。
- 前記制御システムは、前記視野の中心から前記観察対象物の位置までの距離が長いほど前記回転速度を遅くする、請求項1に記載の手術アームシステム。
- 前記制御システムは、前記観察対象物の位置を判別した結果に基づいて、前記観察対象物が前記視野の中心に位置するように前記斜視鏡を支持する多関節アームを制御する、請求項1に記載の手術アームシステム。
- 前記制御システムは、前記観察対象物を画像認識した結果に基づいて、前記観察対象物が前記視野の中心に位置するように前記斜視鏡を支持する多関節アームを制御する、請求項6に記載の手術アームシステム。
- 前記制御システムは、前記観察対象物が前記視野の端に位置する場合は、前記回転速度を0にする、請求項1に記載の手術アームシステム。
- 前記制御システムは、前記距離の増加量に対する前記回転速度の減少量が線形の関係になるように前記回転速度を制御する、請求項5に記載の手術アームシステム。
- 前記制御システムは、前記距離が所定範囲内の場合は、前記回転速度を前記中心と前記観察対象物の位置が一致する場合の前記回転速度と同一とする、請求項5に記載の手術アームシステム。
- 前記制御システムは、前記距離が所定範囲を超える場合は、前記回転速度を一定値とする、請求項5に記載の手術アームシステム。
- 前記制御システムは、前記斜視鏡の回転を制御する第1の制御部と前記多関節アームを制御する第2の制御部を備える、請求項1に記載の手術アームシステム。
- 前記多関節アームは、前記斜視鏡とカメラヘッドをそれぞれ独立して回転制御可能に保持する保持ユニットを備える、請求項12に記載の手術アームシステム。
- 前記保持ユニットは前記第1の制御部を含み、
前記第2の制御部は、前記カメラヘッドと接続された画像処理部を介して、前記第1の制御部が取得した前記斜視鏡の回転角情報を取得し、前記回転角情報に基づいて前記多関節アームを制御する、請求項13に記載の手術アームシステム。 - 複数の関節部が複数のリンクにより回動可能に連結され、先端に斜視鏡を支持可能な多関節アームを制御し、前記斜視鏡の位置及び姿勢を変更するように前記多関節アームを制御する手術アーム制御システムであって、
前記斜視鏡を通して撮像される視野内で、前記視野内の観察対象物の位置に基づいて、前記斜視鏡の回転速度または移動速度の少なくとも一方を制御する、手術アーム制御システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18874625.9A EP3705018A4 (en) | 2017-11-01 | 2018-10-24 | SURGICAL ARM SYSTEM AND SURGICAL ARM CONTROL SYSTEM |
| CN201880069629.8A CN111278344B (zh) | 2017-11-01 | 2018-10-24 | 手术臂系统和手术臂控制系统 |
| JP2019551211A JP7115493B2 (ja) | 2017-11-01 | 2018-10-24 | 手術アームシステム及び手術アーム制御システム |
| US16/758,864 US11612306B2 (en) | 2017-11-01 | 2018-10-24 | Surgical arm system and surgical arm control system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017211783 | 2017-11-01 | ||
| JP2017-211783 | 2017-11-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019087904A1 true WO2019087904A1 (ja) | 2019-05-09 |
Family
ID=66331868
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/039539 WO2019087904A1 (ja) | 2017-11-01 | 2018-10-24 | 手術アームシステム及び手術アーム制御システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11612306B2 (ja) |
| EP (1) | EP3705018A4 (ja) |
| JP (1) | JP7115493B2 (ja) |
| CN (1) | CN111278344B (ja) |
| WO (1) | WO2019087904A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3992690A4 (en) * | 2019-08-02 | 2022-09-07 | Sony Group Corporation | ENDOSCOPE SYSTEM, CONTROL DEVICE AND CONTROL METHOD |
| WO2023017651A1 (ja) * | 2021-08-13 | 2023-02-16 | ソニーグループ株式会社 | 医療用観察システム、情報処理装置及び情報処理方法 |
| US11612306B2 (en) * | 2017-11-01 | 2023-03-28 | Sony Corporation | Surgical arm system and surgical arm control system |
| WO2024128212A1 (ja) * | 2022-12-15 | 2024-06-20 | 国立大学法人 東京大学 | 注視点に基づく情報を出力する情報処理装置、注視点に基づく情報を出力する情報処理方法及びプログラム |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020162633A (ja) * | 2019-03-28 | 2020-10-08 | ソニー株式会社 | 撮影制御装置、撮影制御方法、プログラム、及び、撮影システム |
| CN112754662B (zh) * | 2020-12-31 | 2022-07-15 | 北京科迈启元科技有限公司 | 一种变角度rcm执行机构及手术装置 |
| CN113311941B (zh) * | 2021-05-08 | 2023-11-10 | 南通大学 | 一种生物视觉感知机制研究用实验装置 |
| CN113524182B (zh) * | 2021-07-13 | 2023-05-16 | 东北石油大学 | 一种智能调节人与屏幕距离的装置及方法 |
| CN114713421B (zh) * | 2022-05-05 | 2023-03-24 | 罗海华 | 一种遥控喷涂的控制方法及系统 |
| WO2024171116A1 (en) * | 2023-02-17 | 2024-08-22 | Revolve Surgical Inc. | Robotically assisted, fulcrum-effect correction devices and methods |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004275203A (ja) * | 2003-03-12 | 2004-10-07 | Olympus Corp | 内視鏡保持装置 |
| JP2006218027A (ja) | 2005-02-09 | 2006-08-24 | Olympus Corp | 内視鏡装置 |
| JP2009269102A (ja) | 2008-05-01 | 2009-11-19 | Sony Corp | アクチュエータ制御装置及びアクチュエータ制御方法、アクチュエータ、ロボット装置、並びにコンピュータ・プログラム |
| JP2011209099A (ja) | 2010-03-30 | 2011-10-20 | Sony Corp | トルクセンサおよびロボット装置 |
| JP2016524487A (ja) * | 2013-05-09 | 2016-08-18 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 解剖学的特徴からの内視鏡のロボット制御 |
Family Cites Families (92)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3236070B2 (ja) * | 1992-06-04 | 2001-12-04 | オリンパス光学工業株式会社 | スコープ保持装置およびスコープ装置 |
| US5673367A (en) * | 1992-10-01 | 1997-09-30 | Buckley; Theresa M. | Method for neural network control of motion using real-time environmental feedback |
| JP3618413B2 (ja) | 1995-05-15 | 2005-02-09 | オリンパス株式会社 | 内視鏡装置 |
| JP3668269B2 (ja) * | 1995-01-10 | 2005-07-06 | オリンパス株式会社 | 体腔内手術用マニピュレータ装置 |
| JP2000051149A (ja) * | 1998-08-05 | 2000-02-22 | Techno Sophia:Kk | リニアモーター駆動−無盲点診断治療大腸内視鏡 |
| JP4445598B2 (ja) * | 1999-03-19 | 2010-04-07 | オリンパス株式会社 | 内視鏡カメラ視野制御システム |
| JP4382894B2 (ja) | 1998-12-04 | 2009-12-16 | オリンパス株式会社 | 視野移動内視鏡システム |
| US9107683B2 (en) * | 1999-09-17 | 2015-08-18 | Intuitive Surgical Operations, Inc. | Systems and methods for cancellation of joint motion using the null-space |
| US6471637B1 (en) * | 1999-09-24 | 2002-10-29 | Karl Storz Imaging, Inc. | Image orientation for endoscopic video displays |
| US7037258B2 (en) * | 1999-09-24 | 2006-05-02 | Karl Storz Imaging, Inc. | Image orientation for endoscopic video displays |
| JP2002024795A (ja) * | 2000-07-04 | 2002-01-25 | Sony Corp | 情報処理装置および方法、並びに記録媒体 |
| JP5319040B2 (ja) * | 2000-12-26 | 2013-10-16 | オリンパス株式会社 | 内視鏡装置及び内視鏡装置の作動方法 |
| JP4647839B2 (ja) * | 2001-06-11 | 2011-03-09 | オリンパス株式会社 | 硬性ビデオ内視鏡システム |
| US6663559B2 (en) * | 2001-12-14 | 2003-12-16 | Endactive, Inc. | Interface for a variable direction of view endoscope |
| JP4171833B2 (ja) * | 2002-03-19 | 2008-10-29 | 国立大学法人東京工業大学 | 内視鏡誘導装置および方法 |
| JP2004173973A (ja) * | 2002-11-27 | 2004-06-24 | Azemoto Shiyougo | 斜視内視鏡用投影モデルのパラメータ推定方法 |
| JP2004173972A (ja) * | 2002-11-27 | 2004-06-24 | Azemoto Shiyougo | 斜視内視鏡用画像処理システムおよびこれを備えた斜視内視鏡装置 |
| US7517314B2 (en) * | 2004-10-14 | 2009-04-14 | Karl Storz Development Corp. | Endoscopic imaging with indication of gravity direction |
| EP1967126B1 (en) * | 2005-12-28 | 2014-05-21 | Olympus Medical Systems Corp. | Container device |
| JP4960112B2 (ja) * | 2007-02-01 | 2012-06-27 | オリンパスメディカルシステムズ株式会社 | 内視鏡手術装置 |
| JP5259167B2 (ja) * | 2007-12-06 | 2013-08-07 | オリンパスメディカルシステムズ株式会社 | 光源装置および内視鏡装置 |
| CN102123651B (zh) * | 2009-01-15 | 2014-02-26 | 奥林巴斯医疗株式会社 | 内窥镜系统 |
| WO2010101749A1 (en) * | 2009-03-05 | 2010-09-10 | Massachusetts Institute Of Technology | Predictive semi-autonomous vehicle navigation system |
| WO2011122516A1 (ja) * | 2010-03-30 | 2011-10-06 | テルモ株式会社 | 医療用マニピュレータシステム |
| DE102010024003A1 (de) * | 2010-06-11 | 2011-12-15 | Karl Storz Gmbh & Co. Kg | Endoskop |
| CN102090880B (zh) * | 2011-01-31 | 2012-09-19 | 广州宝胆医疗器械科技有限公司 | 三维立体硬质电子关节镜系统 |
| US10052157B2 (en) * | 2011-08-21 | 2018-08-21 | M.S.T. Medical Surgery Technologies Ltd | Device and method for assisting laparoscopic surgery—rule based approach |
| AU2012301718B2 (en) * | 2011-09-02 | 2017-06-15 | Stryker Corporation | Surgical instrument including a cutting accessory extending from a housing and actuators that establish the position of the cutting accessory relative to the housing |
| JP2013236749A (ja) * | 2012-05-15 | 2013-11-28 | Denso Corp | 歯科インプラント手術支援装置 |
| US9220570B2 (en) * | 2012-06-29 | 2015-12-29 | Children's National Medical Center | Automated surgical and interventional procedures |
| EP2873362B1 (en) * | 2012-07-10 | 2018-09-19 | Olympus Corporation | Insertion device |
| JP5846385B2 (ja) * | 2012-11-07 | 2016-01-20 | 国立大学法人東京工業大学 | 内視鏡操作システム |
| DE202014010578U1 (de) * | 2013-01-10 | 2016-01-07 | M.S.T. Medical Surgery Technologies Ltd. | Chirurgisches Steuersystem |
| KR102087595B1 (ko) * | 2013-02-28 | 2020-03-12 | 삼성전자주식회사 | 내시경 시스템 및 그 제어방법 |
| US20160299170A1 (en) * | 2013-03-29 | 2016-10-13 | Sony Corporation | Laser scanning observation device and laser scanning method |
| JP6656148B2 (ja) * | 2013-10-24 | 2020-03-04 | オーリス ヘルス インコーポレイテッド | ロボット支援管腔内手術のためのシステムおよび関連する方法 |
| JP6091410B2 (ja) * | 2013-12-26 | 2017-03-08 | オリンパス株式会社 | 内視鏡装置の作動方法及び内視鏡システム |
| WO2015121765A1 (en) * | 2014-02-12 | 2015-08-20 | Koninklijke Philips N.V. | Robotic control of surgical instrument visibility |
| WO2015129474A1 (ja) * | 2014-02-28 | 2015-09-03 | ソニー株式会社 | ロボットアーム装置、ロボットアーム制御方法及びプログラム |
| EP3135445B1 (en) * | 2014-03-28 | 2021-04-28 | Sony Corporation | Robot arm device |
| US10743947B2 (en) * | 2014-05-15 | 2020-08-18 | Covidien Lp | Systems and methods for controlling a camera position in a surgical robotic system |
| JP6419462B2 (ja) * | 2014-06-10 | 2018-11-07 | キヤノンメディカルシステムズ株式会社 | X線診断装置 |
| JP6519144B2 (ja) * | 2014-11-06 | 2019-05-29 | ソニー株式会社 | 内視鏡システム、画像処理装置、画像処理方法、およびプログラム |
| JP6632204B2 (ja) * | 2015-03-13 | 2020-01-22 | キヤノン株式会社 | 駆動装置、ロボット装置、および物品の製造方法 |
| WO2016185943A1 (ja) * | 2015-05-21 | 2016-11-24 | シャープ株式会社 | アクチュエータ |
| WO2017015235A1 (en) * | 2015-07-17 | 2017-01-26 | The Johns Hopkins University | Delta mechanism with enhanced torsional stiffness |
| JP2017093818A (ja) * | 2015-11-25 | 2017-06-01 | リバーフィールド株式会社 | 撮像システムおよび固定具 |
| JP6753081B2 (ja) * | 2016-03-09 | 2020-09-09 | ソニー株式会社 | 内視鏡手術システム、画像処理方法及び医療用観察システム |
| EP3434170B1 (en) * | 2016-03-25 | 2021-03-17 | Nikon Corporation | Endoscope apparatus and endoscope system including the same |
| US10807233B2 (en) * | 2016-07-26 | 2020-10-20 | The University Of Connecticut | Skill transfer from a person to a robot |
| CN106361440B (zh) * | 2016-08-31 | 2019-07-12 | 北京术锐技术有限公司 | 一种柔性手术工具系统及其在运动约束下的控制方法 |
| JP6514166B2 (ja) * | 2016-09-16 | 2019-05-15 | ファナック株式会社 | ロボットの動作プログラムを学習する機械学習装置,ロボットシステムおよび機械学習方法 |
| JP2018078463A (ja) * | 2016-11-10 | 2018-05-17 | ソニー株式会社 | 画像処理装置および設定方法、並びにプログラム |
| JP2018075674A (ja) * | 2016-11-10 | 2018-05-17 | ソニー株式会社 | 関節駆動用アクチュエータ |
| JP2018075218A (ja) * | 2016-11-10 | 2018-05-17 | ソニー株式会社 | 医療用支持アーム及び医療用システム |
| EP3590406A4 (en) | 2017-02-28 | 2020-04-01 | Sony Corporation | MEDICAL OBSERVATION SYSTEM, CONTROL DEVICE AND CONTROL METHOD |
| US20190365489A1 (en) * | 2017-02-28 | 2019-12-05 | Sony Corporation | Medical support arm system and control device |
| US11696814B2 (en) * | 2017-02-28 | 2023-07-11 | Sony Corporation | Medical arm system, control device, and control method |
| DE112018001058B4 (de) * | 2017-02-28 | 2020-12-03 | Sony Corporation | Medizinisches tragarmsystem und steuervorrichtung |
| US10904437B2 (en) * | 2017-03-16 | 2021-01-26 | Sony Corporation | Control apparatus and control method |
| JP7146735B2 (ja) * | 2017-03-29 | 2022-10-04 | ソニー・オリンパスメディカルソリューションズ株式会社 | 制御装置、外部機器、医療用観察システム、制御方法、表示方法およびプログラム |
| JP2018198750A (ja) * | 2017-05-26 | 2018-12-20 | ソニー株式会社 | 医療用システム、医療用支持アームの制御装置、および医療用支持アームの制御方法 |
| US11344180B2 (en) * | 2017-06-15 | 2022-05-31 | Children's National Medical Center | System, apparatus, and method for calibrating oblique-viewing rigid endoscope |
| WO2019012817A1 (ja) * | 2017-07-14 | 2019-01-17 | ソニー株式会社 | 画像処理装置、画像処理装置の画像処理方法、プログラム |
| CN110913744B (zh) * | 2017-07-19 | 2023-07-11 | 索尼公司 | 手术系统、控制方法、手术装置和程序 |
| WO2019044328A1 (ja) * | 2017-08-31 | 2019-03-07 | ソニー株式会社 | 医療用画像処理装置、医療用画像処理システム、及び医療用画像処理装置の駆動方法 |
| WO2019087934A1 (en) * | 2017-11-01 | 2019-05-09 | Sony Corporation | Medical holding apparatus, medical arm system, and drape mounting mechanism |
| JP7159579B2 (ja) * | 2017-11-01 | 2022-10-25 | ソニーグループ株式会社 | 医療用保持装置、及び医療用アームシステム |
| CN111278344B (zh) * | 2017-11-01 | 2023-09-05 | 索尼公司 | 手术臂系统和手术臂控制系统 |
| JPWO2019092950A1 (ja) * | 2017-11-13 | 2020-11-12 | ソニー株式会社 | 画像処理装置、画像処理方法および画像処理システム |
| US20210030510A1 (en) * | 2018-02-09 | 2021-02-04 | Sony Corporation | Surgery system, image processor, and image processing method |
| JP7151109B2 (ja) * | 2018-03-19 | 2022-10-12 | ソニーグループ株式会社 | 医療用撮像装置及び医療用観察システム |
| JP2021097720A (ja) * | 2018-03-20 | 2021-07-01 | ソニーグループ株式会社 | 内視鏡及びアームシステム |
| JP7363767B2 (ja) * | 2018-03-29 | 2023-10-18 | ソニーグループ株式会社 | 画像処理装置と画像処理方法およびプログラム |
| KR20210005682A (ko) * | 2018-04-26 | 2021-01-14 | 데카 프로덕츠 리미티드 파트너쉽 | 회전 가능한 카메라를 갖는 내시경 및 관련 방법 |
| JPWO2019239942A1 (ja) * | 2018-06-15 | 2021-07-01 | ソニーグループ株式会社 | 手術用観察装置、手術用観察方法、手術用光源装置、及び手術用の光照射方法 |
| US20210321887A1 (en) * | 2018-08-28 | 2021-10-21 | Sony Corporation | Medical system, information processing apparatus, and information processing method |
| JPWO2020045014A1 (ja) * | 2018-08-28 | 2021-08-12 | ソニーグループ株式会社 | 医療システム、情報処理装置及び情報処理方法 |
| WO2020075773A1 (en) * | 2018-10-12 | 2020-04-16 | Sony Corporation | A system, method and computer program for verifying features of a scene |
| JP2020071270A (ja) * | 2018-10-29 | 2020-05-07 | ソニー株式会社 | 撮像レンズおよび撮像装置 |
| US20220022728A1 (en) * | 2018-12-04 | 2022-01-27 | Sony Group Corporation | Medical system, information processing device, and information processing method |
| US11653119B2 (en) * | 2019-03-14 | 2023-05-16 | Sony Semiconductor Solution Corporation | Solid-state image sensor and imaging device |
| JP2020156800A (ja) * | 2019-03-27 | 2020-10-01 | ソニー株式会社 | 医療用アームシステム、制御装置、及び制御方法 |
| WO2020203167A1 (ja) * | 2019-03-29 | 2020-10-08 | ソニー株式会社 | 画像処理装置、画像処理方法およびプログラム |
| WO2020213296A1 (ja) * | 2019-04-19 | 2020-10-22 | ソニー株式会社 | 信号処理装置、信号処理方法、プログラム及び指向性可変用システム |
| JP7480477B2 (ja) * | 2019-07-10 | 2024-05-10 | ソニーグループ株式会社 | 医療用観察システム、制御装置及び制御方法 |
| EP3992690A4 (en) * | 2019-08-02 | 2022-09-07 | Sony Group Corporation | ENDOSCOPE SYSTEM, CONTROL DEVICE AND CONTROL METHOD |
| JP2021040988A (ja) * | 2019-09-12 | 2021-03-18 | ソニー株式会社 | 医療用支持アーム、及び医療用システム |
| JP2021040987A (ja) * | 2019-09-12 | 2021-03-18 | ソニー株式会社 | 医療用支持アーム、及び医療用システム |
| JP7385731B2 (ja) * | 2020-02-27 | 2023-11-22 | オリンパス株式会社 | 内視鏡システム、画像処理装置の作動方法及び内視鏡 |
| JP2022020592A (ja) * | 2020-07-20 | 2022-02-01 | ソニーグループ株式会社 | 医療用アーム制御システム、医療用アーム制御方法、及びプログラム |
| JP2022045236A (ja) * | 2020-09-08 | 2022-03-18 | ソニーグループ株式会社 | 医療用撮像装置、学習モデル生成方法および学習モデル生成プログラム |
-
2018
- 2018-10-24 CN CN201880069629.8A patent/CN111278344B/zh active Active
- 2018-10-24 JP JP2019551211A patent/JP7115493B2/ja active Active
- 2018-10-24 US US16/758,864 patent/US11612306B2/en active Active
- 2018-10-24 EP EP18874625.9A patent/EP3705018A4/en active Pending
- 2018-10-24 WO PCT/JP2018/039539 patent/WO2019087904A1/ja unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004275203A (ja) * | 2003-03-12 | 2004-10-07 | Olympus Corp | 内視鏡保持装置 |
| JP2006218027A (ja) | 2005-02-09 | 2006-08-24 | Olympus Corp | 内視鏡装置 |
| JP2009269102A (ja) | 2008-05-01 | 2009-11-19 | Sony Corp | アクチュエータ制御装置及びアクチュエータ制御方法、アクチュエータ、ロボット装置、並びにコンピュータ・プログラム |
| JP2011209099A (ja) | 2010-03-30 | 2011-10-20 | Sony Corp | トルクセンサおよびロボット装置 |
| JP2016524487A (ja) * | 2013-05-09 | 2016-08-18 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 解剖学的特徴からの内視鏡のロボット制御 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11612306B2 (en) * | 2017-11-01 | 2023-03-28 | Sony Corporation | Surgical arm system and surgical arm control system |
| EP3992690A4 (en) * | 2019-08-02 | 2022-09-07 | Sony Group Corporation | ENDOSCOPE SYSTEM, CONTROL DEVICE AND CONTROL METHOD |
| WO2023017651A1 (ja) * | 2021-08-13 | 2023-02-16 | ソニーグループ株式会社 | 医療用観察システム、情報処理装置及び情報処理方法 |
| WO2024128212A1 (ja) * | 2022-12-15 | 2024-06-20 | 国立大学法人 東京大学 | 注視点に基づく情報を出力する情報処理装置、注視点に基づく情報を出力する情報処理方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US11612306B2 (en) | 2023-03-28 |
| JPWO2019087904A1 (ja) | 2020-12-10 |
| JP7115493B2 (ja) | 2022-08-09 |
| CN111278344B (zh) | 2023-09-05 |
| CN111278344A (zh) | 2020-06-12 |
| US20210369351A1 (en) | 2021-12-02 |
| EP3705018A1 (en) | 2020-09-09 |
| EP3705018A4 (en) | 2020-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7115493B2 (ja) | 手術アームシステム及び手術アーム制御システム | |
| JP7003985B2 (ja) | 医療用支持アームシステムおよび制御装置 | |
| CN110325093B (zh) | 医疗用臂系统、控制装置与控制方法 | |
| WO2020196338A1 (en) | Medical arm system, control device, and control method | |
| JP7480477B2 (ja) | 医療用観察システム、制御装置及び制御方法 | |
| WO2017145475A1 (ja) | 医療用情報処理装置、情報処理方法、医療用情報処理システム | |
| WO2018159336A1 (ja) | 医療用支持アームシステムおよび制御装置 | |
| WO2018088105A1 (ja) | 医療用支持アーム及び医療用システム | |
| JP2019084334A (ja) | 医療用保持装置、医療用アームシステム、及びドレープ装着機構 | |
| WO2021049438A1 (ja) | 医療用支持アーム、及び医療用システム | |
| WO2018088113A1 (ja) | 関節駆動用アクチュエータ及び医療用システム | |
| JP2020074926A (ja) | 医療用観察システム、信号処理装置及び医療用観察方法 | |
| WO2021049220A1 (ja) | 医療用支持アーム、及び医療用システム | |
| WO2018043205A1 (ja) | 医療用画像処理装置、医療用画像処理方法、プログラム | |
| WO2022269992A1 (ja) | 医療用観察システム、情報処理装置及び情報処理方法 | |
| WO2023176133A1 (ja) | 内視鏡用保持装置、内視鏡手術システム、及び制御方法 | |
| WO2020050187A1 (ja) | 医療システム、情報処理装置及び情報処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18874625 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2019551211 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018874625 Country of ref document: EP Effective date: 20200602 |