JP5259167B2 - 光源装置および内視鏡装置 - Google Patents
光源装置および内視鏡装置 Download PDFInfo
- Publication number
- JP5259167B2 JP5259167B2 JP2007316121A JP2007316121A JP5259167B2 JP 5259167 B2 JP5259167 B2 JP 5259167B2 JP 2007316121 A JP2007316121 A JP 2007316121A JP 2007316121 A JP2007316121 A JP 2007316121A JP 5259167 B2 JP5259167 B2 JP 5259167B2
- Authority
- JP
- Japan
- Prior art keywords
- light source
- diaphragm
- light
- diaphragm blade
- source device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0661—Endoscope light sources
- A61B1/0669—Endoscope light sources at proximal end of an endoscope
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/74—Circuitry for compensating brightness variation in the scene by influencing the scene brightness using illuminating means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0655—Control therefor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/555—Constructional details for picking-up images in sites, inaccessible due to their dimensions or hazardous conditions, e.g. endoscopes or borescopes
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Radiology & Medical Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Biomedical Technology (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Studio Devices (AREA)
Description
以下、図面を参照して本発明の実施の形態の内視鏡装置1について説明する。
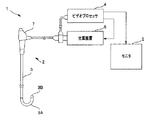
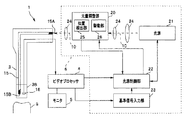
図1は、本実施の形態にかかる内視鏡装置1の全体の構成を示す構成図であり、図2は、光源装置6の構成を示す構成図である。図1に示すように内視鏡装置1は、内視鏡2と、光源装置6と、ビデオプロセッサ4と、モニタ5とを有して構成されている。 内視鏡2は、被検体9内に挿入される細長い挿入部3と、この挿入部3の基端側に連設される操作部7とを有している。挿入部3は、軟性を有する可撓管部の先端側に設けられた湾曲部3Aと、この湾曲部3Aの先端側に設けられた先端部3Bとを有して構成されている。先端部3Bには、被検体9内の観察対象部位9Aを撮像する撮像素子であるCCD16(図2参照)が内蔵されており、CCD16の撮像信号はビデオプロセッサ4を介して、モニタ5の表示画面に表示される。一方、光源装置6から供給される照射光は、挿入部3内に配設されたライトガイド15(図2参照)により挿入部3の先端部3Bまで伝達される。
最初に、光源制御部22は、輝度信号をビデオプロセッサ4から取得する。輝度信号は、CCD16が取得した映像信号をビデオプロセッサ4が処理しモニタ5に表示される表示画面の平均的な明るさの情報である。あるいは、輝度信号として、モニタ5に表示される表示画面の特定の部分のみの情報を用いてもよい。
光源制御部22は、基準輝度信号を基準信号入力部23から取得する。基準輝度信号はモニタ5に表示される表示画面の明るさの目標値である。基準輝度信号は術者が基準信号入力部23に配設したダイヤル等で入力してもよいし、あるいは、ある時点のビデオプロセッサ4からの輝度信号を基準輝度信号として入力されてもよい。
光源制御部22は、輝度信号と基準輝度信号とを比較し、その差が所定値の範囲内であるかどうか判断する。輝度信号と基準輝度信号との差が所定値の範囲内(Yes)の場合には、光源制御部22は、絞り羽12を駆動する必要がないため、ステップS11からの動作を繰り返す。一方、輝度信号と基準輝度信号との差が所定値の範囲を越える(No)場合には、光源制御部22は、絞り羽12を駆動するために、ステップS14以下の動作を行う。
光源制御部22は、位置検出部25から絞り羽12の現在位置の情報、例えば重心角度θを取得する。
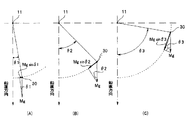
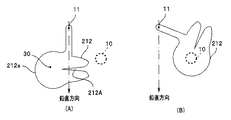
光源制御部22は、ステップS13で算出した輝度信号と基準輝度信号との差と、ステップS14で取得した絞り羽12の現在位置の情報から、絞り羽12の回転方向と、回転量すなわち駆動信号を算出する。ここで、回転方向は、絞り羽12を開ける方向、すなわち下方向か、あるいは、絞り羽12を閉める方向、すなわち上方向のいずれかである。また、回転量は、絞り羽12の位置、すなわち角度と、光量調整部20から射出される光量の関係を、予め求めておくことで、算出される。
光源制御部22は、ステップS15で算出した絞り羽12の回転方向から用いる補正係数を判断する。回転方向により制御信号に用いる補正係数が異なるためである。すなわち、光源制御部22は、絞り羽12の回転方向が上方向の場合には、ステップS17からの処理を、絞り羽12の回転方向が下方向の場合には、ステップS19からの処理を行う。
絞り羽12が上方向に回転する場合には、光源制御部22は、図5(B)に示すような、重心角度θと補正係数αの関係式である補正関数αを算出する。なお、補正関数αは毎回、算出する必要はなく、予め算出しておいた補正関数αを用いたのでよい。
絞り羽12が上方向に回転する場合には、光源制御部22は、絞り羽12の現在位置の重心角度θを補正関数αに代入することで、補正係数αを算出する。
絞り羽12が下方向に回転する場合には、光源制御部22は、図5(C)に示すような、重心角度θと補正係数βの関係式である補正関数βを算出する。なお、補正関数βは毎回、算出する必要はなく、予め算出しておいた補正関数βを用いたのでよい。
絞り羽12が下方向に回転する場合には、光源制御部22は、絞り羽12の現在位置の重心角度θを補正関数βに代入することで、補正係数βを算出する。
光源制御部22は、ステップS15で算出した駆動信号に、補正係数αまたは補正係数βを乗じて駆動信号を補正する。
光源制御部22は、補正された駆動信号を駆動部26に出力する。駆動部26は補正された駆動信号に従い、絞り羽12を駆動する。
光源制御部22は、動作終了指示があるまで、ステップS11からの処理を繰り返す。
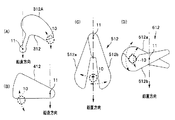
以下、図面を参照して本発明の実施の形態の変形例の光源装置の絞り羽について説明する。本変形例の光源装置の基本構成は実施の形態の光源装置6と、ほぼ同じであるため、同じ構成要素には同じ符号を付し説明は省略し、以下、絞り羽についてのみ説明する。
Claims (3)
- 光源と、前記光源からの光束を絞り羽を用いて制限する光量調整手段を備えた光源装置であって、
前記光量調整手段は、
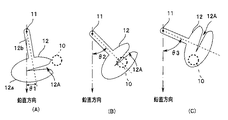
回転軸を中心に鉛直面を回転駆動し、前記回転軸に対して重心が偏心した前記絞り羽と、
前記絞り羽の位置を検出する位置検出手段と、
前記絞り羽を回転駆動する駆動手段と、
前記駆動手段を制御する制御手段とを有し、
前記制御手段は、前記位置検出手段が検出した前記絞り羽の位置、および回転方向に基づいて前記駆動手段を制御し、当該駆動手段の制御は、前記絞り羽の自重の回転方向成分に基づいた補正係数を用いて行われることを特徴とする光源装置。 - 前記補正係数は、現在位置の前記絞り羽の自重の回転方向成分と、目標位置の前記絞り羽の自重の回転方向成分との比であることを特徴とする請求項1に記載の光源装置。
- 請求項1または請求項2に記載の光源装置を具備することを特徴とする内視鏡装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007316121A JP5259167B2 (ja) | 2007-12-06 | 2007-12-06 | 光源装置および内視鏡装置 |
| EP08020234A EP2067436B1 (en) | 2007-12-06 | 2008-11-20 | Light source apparatus and endoscope apparatus |
| CN2008101787733A CN101449962B (zh) | 2007-12-06 | 2008-12-01 | 光源装置和内窥镜装置 |
| US12/329,737 US8294755B2 (en) | 2007-12-06 | 2008-12-08 | Light source apparatus and endoscope apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007316121A JP5259167B2 (ja) | 2007-12-06 | 2007-12-06 | 光源装置および内視鏡装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009136491A JP2009136491A (ja) | 2009-06-25 |
| JP5259167B2 true JP5259167B2 (ja) | 2013-08-07 |
Family
ID=40299390
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007316121A Expired - Fee Related JP5259167B2 (ja) | 2007-12-06 | 2007-12-06 | 光源装置および内視鏡装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8294755B2 (ja) |
| EP (1) | EP2067436B1 (ja) |
| JP (1) | JP5259167B2 (ja) |
| CN (1) | CN101449962B (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103002791B (zh) * | 2010-07-14 | 2015-09-09 | 奥林巴斯医疗株式会社 | 内窥镜光源装置以及内窥镜系统 |
| TWI459307B (zh) * | 2011-07-20 | 2014-11-01 | Altek Corp | 具物體位置偵測功能之裝置及其偵測方法 |
| EP2796086A4 (en) * | 2012-09-18 | 2015-09-09 | Olympus Medical Systems Corp | LIGHT SOURCE DEVICE AND METHOD FOR LIGHT CONTROL OF A LIGHT SOURCE DEVICE |
| CN103006171B (zh) * | 2012-12-13 | 2015-07-29 | 深圳开立生物医疗科技股份有限公司 | 光源装置和内窥镜装置 |
| CN104083144B (zh) * | 2013-11-28 | 2016-02-03 | 北京华科创智健康科技股份有限公司 | 一种电子内窥镜图像区域亮度控制的方法和装置 |
| CN107065170B (zh) * | 2017-05-12 | 2019-07-05 | 重庆金山医疗器械有限公司 | 电子内窥镜光源光路控制系统 |
| CN110691545B (zh) * | 2017-06-02 | 2021-06-18 | 奥林巴斯株式会社 | 内窥镜光源装置 |
| JP7115493B2 (ja) * | 2017-11-01 | 2022-08-09 | ソニーグループ株式会社 | 手術アームシステム及び手術アーム制御システム |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4834071A (en) | 1987-07-13 | 1989-05-30 | Kabushiki Kaisha Toshiba | Illuminance controller for light source and endoscope including the same |
| US5087122A (en) | 1990-08-13 | 1992-02-11 | Laser Precision Corporation | Adjustable attenuator for optical transmission system |
| JP2577260Y2 (ja) | 1990-11-20 | 1998-07-23 | 旭光学工業株式会社 | 内視鏡用光源装置 |
| US5868666A (en) | 1993-11-26 | 1999-02-09 | Olympus Optical Co., Ltd. | Endoscope apparatus using programmable integrated circuit to constitute internal structure thereof |
| JP3523675B2 (ja) | 1993-12-22 | 2004-04-26 | オリンパス株式会社 | 調光回路 |
| JP3285264B2 (ja) * | 1993-11-26 | 2002-05-27 | オリンパス光学工業株式会社 | 内視鏡用自動調光装置 |
| JP3676633B2 (ja) | 1998-12-28 | 2005-07-27 | ペンタックス株式会社 | 内視鏡の絞り制御装置 |
| US6473116B1 (en) | 1998-12-28 | 2002-10-29 | Asahi Kogaku Kogyo Kabushiki Kaisha | Electronic endoscope |
| JP2001137186A (ja) * | 1999-11-18 | 2001-05-22 | Asahi Optical Co Ltd | 電子内視鏡 |
| JP3995954B2 (ja) * | 2001-03-02 | 2007-10-24 | ペンタックス株式会社 | 自動調光機能を備えた電子内視鏡装置 |
| JP2003325446A (ja) * | 2002-05-14 | 2003-11-18 | Olympus Optical Co Ltd | 光源装置 |
| JP5269346B2 (ja) | 2007-05-10 | 2013-08-21 | オリンパスメディカルシステムズ株式会社 | 光源装置及び内視鏡装置 |
-
2007
- 2007-12-06 JP JP2007316121A patent/JP5259167B2/ja not_active Expired - Fee Related
-
2008
- 2008-11-20 EP EP08020234A patent/EP2067436B1/en not_active Not-in-force
- 2008-12-01 CN CN2008101787733A patent/CN101449962B/zh not_active Expired - Fee Related
- 2008-12-08 US US12/329,737 patent/US8294755B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101449962A (zh) | 2009-06-10 |
| JP2009136491A (ja) | 2009-06-25 |
| US8294755B2 (en) | 2012-10-23 |
| CN101449962B (zh) | 2010-10-13 |
| EP2067436A1 (en) | 2009-06-10 |
| EP2067436B1 (en) | 2011-09-07 |
| US20090147079A1 (en) | 2009-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5259167B2 (ja) | 光源装置および内視鏡装置 | |
| EP2878253B1 (en) | Wire driver for wire line and endoscope | |
| US9510736B2 (en) | Stereoscopic endoscope device having mechanism that changes an angle between optical axes of two imaging sensors | |
| US10441132B2 (en) | Method of controlling endoscopes, and endoscope system | |
| US9895143B2 (en) | Medical system and method of controlling medical instruments | |
| JP3345645B2 (ja) | 体腔内観察装置 | |
| EP1854420A1 (en) | Treatment system and trocar | |
| EP3530228B1 (en) | Microscope device and control method | |
| JPS63182621A (ja) | 内視鏡の光源装置 | |
| JP2009077759A (ja) | X線診断装置 | |
| JP5499427B2 (ja) | 内視鏡カメラおよび内視鏡カメラシステム | |
| JP5150388B2 (ja) | 内視鏡 | |
| US20180071034A1 (en) | Medical manipulator system | |
| EP2979613B1 (en) | Device for endoscopic surgery | |
| JP3552737B2 (ja) | 手術用顕微鏡 | |
| JP2019141590A (ja) | 可動のビームデフレクタを備えた医療用観察装置および該医療用観察装置の操作方法 | |
| JP3977025B2 (ja) | 内視鏡装置用プロセッサ | |
| JP2005292453A (ja) | 表示装置 | |
| JP2003177326A (ja) | 手術用顕微鏡 | |
| KR102107593B1 (ko) | 씨암용 엑스선 표시장치 및 이를 포함하는 씨암 | |
| WO2020084891A1 (ja) | 医療用双方向縫合システム | |
| JP2002228943A (ja) | 内視鏡装置用光源システムおよび内視鏡装置 | |
| JP2002272681A (ja) | 内視鏡装置用プロセッサ | |
| JP2006034456A (ja) | 内視鏡 | |
| WO2014054770A1 (ja) | 体腔内挿入具の案内器具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101005 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120814 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121015 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130409 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130424 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160502 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5259167 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |