WO2017159069A1 - 電磁接触器の操作コイル駆動装置 - Google Patents
電磁接触器の操作コイル駆動装置 Download PDFInfo
- Publication number
- WO2017159069A1 WO2017159069A1 PCT/JP2017/002965 JP2017002965W WO2017159069A1 WO 2017159069 A1 WO2017159069 A1 WO 2017159069A1 JP 2017002965 W JP2017002965 W JP 2017002965W WO 2017159069 A1 WO2017159069 A1 WO 2017159069A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- coil
- unit
- determination
- contact
- control
- Prior art date
Links
Images






Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H47/00—Circuit arrangements not adapted to a particular application of the relay and designed to obtain desired operating characteristics or to provide energising current
- H01H47/22—Circuit arrangements not adapted to a particular application of the relay and designed to obtain desired operating characteristics or to provide energising current for supplying energising current for relay coil
- H01H47/32—Energising current supplied by semiconductor device
- H01H47/325—Energising current supplied by semiconductor device by switching regulator
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/18—Circuit arrangements for obtaining desired operating characteristics, e.g. for slow operation, for sequential energisation of windings, for high-speed energisation of windings
- H01F7/1844—Monitoring or fail-safe circuits
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H47/00—Circuit arrangements not adapted to a particular application of the relay and designed to obtain desired operating characteristics or to provide energising current
- H01H47/22—Circuit arrangements not adapted to a particular application of the relay and designed to obtain desired operating characteristics or to provide energising current for supplying energising current for relay coil
- H01H47/223—Circuit arrangements not adapted to a particular application of the relay and designed to obtain desired operating characteristics or to provide energising current for supplying energising current for relay coil adapted to be supplied by AC
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H47/00—Circuit arrangements not adapted to a particular application of the relay and designed to obtain desired operating characteristics or to provide energising current
- H01H47/22—Circuit arrangements not adapted to a particular application of the relay and designed to obtain desired operating characteristics or to provide energising current for supplying energising current for relay coil
- H01H47/32—Energising current supplied by semiconductor device
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/20—Output circuits, e.g. for controlling currents in command coils
- F02D2041/202—Output circuits, e.g. for controlling currents in command coils characterised by the control of the circuit
- F02D2041/2058—Output circuits, e.g. for controlling currents in command coils characterised by the control of the circuit using information of the actual current value
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/06—Electromagnets; Actuators including electromagnets
- H01F7/08—Electromagnets; Actuators including electromagnets with armatures
- H01F7/18—Circuit arrangements for obtaining desired operating characteristics, e.g. for slow operation, for sequential energisation of windings, for high-speed energisation of windings
- H01F7/1844—Monitoring or fail-safe circuits
- H01F2007/1861—Monitoring or fail-safe circuits using derivative of measured variable
Abstract
位置センサやタイマを用いることなく可動鉄心の吸着状態を確実に検出することができる電磁接触器の操作コイル駆動装置を提供する。電磁接触器の操作コイルをスイッチング制御する際に操作コイル(21d),(21e)を流れるコイル電流を検出する電流検出部(41)と、操作コイルに電源電圧をスイッチングして印可する半導体スイッチング素子(40)のオン・オフ時間比率を閉路制御時に保持制御時に比較して大きくするように制御する駆動制御部(36)とを備えている。駆動制御部は、閉路制御時に電流検出部で検出されるコイル電流の変化軌跡に沿って連続的に増加する判定用軌跡を設定する判定用軌跡設定部(52a)と、この判定用軌跡設定部の判定用軌跡と電流検出部で検出したコイル電流との偏差に基づいて可動接触子の固定接触子への接触による接点閉路状態を判定する閉路状態判定部(54)とを備えている。
Description
本発明は、電動モータ等の電気的負荷装置に供給する電流を開閉する電磁接触器の操作コイル駆動装置に関するものである。
電磁接触器は、電磁石装置を構成する操作コイルの通電によって固定鉄心に可動鉄心を吸引する吸引力を発生させて、固定接触子に対して可動接触子を接離させる。これにより、単相電源や三相電源と負荷機器間の電路を開閉する。
電磁接触器に用いられるコイル駆動回路としては、従来、種々の提案がなされている(例えば、特許文献1~3参照)。
電磁接触器に用いられるコイル駆動回路としては、従来、種々の提案がなされている(例えば、特許文献1~3参照)。
特許文献1では、操作コイルに電源電圧を供給する半導体スイッチング素子と、電源電圧を検出する電圧検出回路と、この電圧検出回路の検出電圧に応じた投入用レベル信号を出力し、且つ設定された時間の後にその検出電圧に基づいて投入用レベル信号よりも高い保持用レベル信号を出力するゲイン回路と、鋸波を発生する基準波発生回路と、この基準波発生回路の鋸波と前記ゲイン回路の投入用レベル信号を比較して一定周期の投入用パルス信号を出力設定時間後に前記鋸波と保持用レベル信号とを比較して前記投入用パルス信号よりもオン・オフ時間比率(デューティ比とも言う)の小さな保持用パルス信号を出力する比較器と、この比較回路の投入パルス信号と保持用パルス信号を前記半導体スイッチング素子に供給するパルス出力回路を備えた電磁石のコイル駆動装置が開示されている。
すなわち、この特許文献1では、電磁石の鉄心ギャップが大きい(すなわち、固定接点と可動接点が離間している)閉路制御時では大きな吸引力が必要であるので、大きな電流でコイルを励磁する一方、鉄心が吸着状態になり鉄心ギャップのない保持制御時では比較的小さな電流で操作コイルを励磁しても保持が可能であるので、できるだけコイル電流を少なくして電力消費を低減する技術が示されている。
また、特許文献2では、電磁継電器の駆動時に操作コイルに印加する電圧をコンデンサと抵抗による積分回路により積分して、積分回路の時定数による時間経過後に印加電圧を低減して操作コイル駆動の電力を低減する技術が示されている。なお、ここでの積分回路は電磁継電器への印加電圧を任意に設定したコンデンサ、抵抗により積分するものであり、電磁継電器の操作コイルの動作を検出するものではなく、操作コイルへの印加電圧からの時間を設定するための時限回路となっている。
また、特許文献3では、電源投入開始時の電源電圧が判定値を超えたときに操作コイルに励磁電流を流すスイッチ手段と、前記励磁電流の検出手段と、この検出手段の検出値が判定値を超えたときに動作開始する、電源電圧の大きさに逆比例した動作設定時間のタイマ回路と、このタイマ回路の動作設定時間経過後に前記スイッチ手段を制御して前記操作コイルに保持動作電流を流す手段とを備えた電磁石装置が開示されている。
すなわち、この特許文献3に記載された従来例では、(1)電源印加時の衝撃を低減するために電源投入から保持状態への切替え時間を、印加電圧が高いときは切替え時間を短くし、印加電圧が低下すると切替え時間を長くするように電圧と切替え時間とを逆比例させて制御する技術と、(2)電磁開閉器の操作コイルを保持動作に切替えるタイミングを決定するために、操作コイルのインピーダンスを測定し、インピーダンスが増加して電磁石が吸引したときに操作コイル保持動作に制御する技術と、(3)操作コイルインピーダンス測定のために操作コイル駆動用とは別のコイルに高周波電圧を印加するための高周波電源を用意し、この高周波電圧により操作コイルに流れる電流を測定してその高周波電流の変化から操作コイルのインピーダンスを測定する技術が示されている。
しかしながら、従来の電磁接触器の操作コイル駆動装置には、次のような課題がある。通常、電磁接触器がオフ状態からオン状態に変化する閉路動作時に大きなコイル電流を流して可動鉄心を釈放状態から吸着状態に移行させ、その吸着状態になったときに操作コイル電流を低減するように切り替えている。そして、制御動作の切替え方法として、可動鉄心の吸着状態を検出する位置センサを用いる方法や、可動鉄心の吸着までの時間に合わせて設定したタイマを用いる方法が採用されている。
しかし、位置センサを用いる方法では、動作は確実であるが鉄心位置検出のセンサが別に必要となる。また、可動鉄心の吸着までの時間は、電源電圧の変動、周囲温度の変化や操作コイルの自己発熱に起因する温度変換によるコイル抵抗の変動、電磁接触器の取付け方向の影響によって変動する。このため、タイマを用いる方法では、これらの最悪条件でも鉄心吸着後に確実に制御動作の切替えを行なえるように設定する必要があり、制御動作切替えようのタイマ時限は、鉄心吸着時間よりも十分長く設定することになる。その結果、操作コイル制御回路素子には閉路制御時に大きな電流が鉄心の吸着時間以上の時間流れることになるので、鉄心の吸着位置検出による制御動作の切替えに比べて回路素子の定格は大きなものとなる。
この課題を解決するため、従来では、印加する電源電圧の調整によって操作コイルの吸引力を低減することが一般的に行なわれている。しかし、閉路制御時及び保持制御時での操作コイル電流は、コイル抵抗値のばらつき、コイル温度の上昇によるコイル抵抗の変化など電源電圧以外の変動要因による影響を受けるので、従来では、十分な効果がえられていないのが実状である。
そこで、本発明は、上記従来例の課題に着目してなされたものであり、位置センサやタイマを用いることなく可動鉄心の吸着状態を確実に検出することができる電磁接触器の操作コイル駆動装置を提供することを目的としている。
上記目的を達成するため、本発明に係る電磁接触器の操作コイル駆動装置の一態様は、固定接触子に対して接離可能に配置された可動接触子を有し、可動接触子を可動させる可動鉄心を吸引する固定鉄心に巻かれた操作コイルに電源電圧をスイッチング制御して印可する電磁接触器と、スイッチング制御により前記操作コイルを流れるコイル電流を検出する電流検出部と、操作コイルに電源電圧をスイッチングして印可する半導体スイッチング素子のオン・オフ時間比率を閉路制御時に保持制御時に比較して大きくするように制御する駆動制御部とを備えている。そして、駆動制御部は、閉路制御時に電流検出部で検出されるコイル電流の変化軌跡に沿って連続的に増加する判定用軌跡を設定する判定用軌跡設定部と、この判定用軌跡設定部の判定用軌跡と電流検出部で検出したコイル電流との偏差に基づいて可動接触子の固定接触子への接触による接点閉路状態を判定する閉路状態判定部とを備えている。
本発明の一態様によれば、判定用軌跡を設定する判定用軌跡設定部を設けることで、可動接触子の固定接触子への接触による接点閉路状態を位置センサやタイマを用いることなく確実に検出することができる。
次に、図面を参照して、本発明の一実施の形態を説明する。
以下の図面の記載において、同一又は類似の部分には同一又は類似の符号を付している。ただし、図面は模式的なものであり、厚みと平面寸法との関係、各層の厚みの比率等は現実のものとは異なることに留意すべきである。したがって、具体的な厚みや寸法は以下の説明を参酌して判断すべきものである。又、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれていることはもちろんである。
以下の図面の記載において、同一又は類似の部分には同一又は類似の符号を付している。ただし、図面は模式的なものであり、厚みと平面寸法との関係、各層の厚みの比率等は現実のものとは異なることに留意すべきである。したがって、具体的な厚みや寸法は以下の説明を参酌して判断すべきものである。又、図面相互間においても互いの寸法の関係や比率が異なる部分が含まれていることはもちろんである。
また、以下に示す実施の形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の材質、形状、構造、配置等を下記のものに特定するものでない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
以下、本発明の第1の実施の形態である電磁接触器の操作コイル駆動装置の一態様について説明する。
以下、本発明の第1の実施の形態である電磁接触器の操作コイル駆動装置の一態様について説明する。
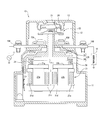
先ず、本発明に適用し得る電磁接触器10は、図1に示すように、絶縁材からなる下ケース11と、下ケース11の上部に装着した絶縁材からなる上ケース12と、上ケース12の上部開口を覆って装着した絶縁材からなる消弧カバー13とで構成されている。
上ケース12の中間壁には、左右一対の固定接触子15A,15B及び端子板16A,16Bが所定間隔を保って固定されている。
上ケース12の中間壁には、左右一対の固定接触子15A,15B及び端子板16A,16Bが所定間隔を保って固定されている。
固定接触子15A及び端子板16Aは、外部供給電源17に接続され、固定接触子15B及び端子板16Bは、電動機等の電気機器を駆動するインバータ等の負荷装置18に接続されている。
下ケース11の空間部及び上ケース12の中間壁より下側の空間部の下部空間には、電磁石装置21が収納されている。この電磁石装置21は、左右一対の固定鉄心21a,21bと、一方の固定鉄心21aの外周にコイルホルダ21cを介して巻回された操作コイル21dと、他方の固定鉄心21bの外周にコイルホルダ21cを介して巻回された操作コイル21eと、一対の固定鉄心21a,21bの下部端面に当接して設けたヨーク21fと、一対の固定鉄心21a,21bの上部端面に当接して設けた磁極板21g,21hと、磁極板21g,21hに対向して配置された可動鉄心21iとを備えている。
下ケース11の空間部及び上ケース12の中間壁より下側の空間部の下部空間には、電磁石装置21が収納されている。この電磁石装置21は、左右一対の固定鉄心21a,21bと、一方の固定鉄心21aの外周にコイルホルダ21cを介して巻回された操作コイル21dと、他方の固定鉄心21bの外周にコイルホルダ21cを介して巻回された操作コイル21eと、一対の固定鉄心21a,21bの下部端面に当接して設けたヨーク21fと、一対の固定鉄心21a,21bの上部端面に当接して設けた磁極板21g,21hと、磁極板21g,21hに対向して配置された可動鉄心21iとを備えている。
また、上ケース12の中間壁部を挟む内部空間に可動接点機構22が収納されている。
可動接点機構22は、接点支え23及び電磁石装置21の可動鉄心21iを固定する連結部24を備えて上下方向に移動自在に配置された可動接点ホルダ25と、可動接点ホルダ25の上部に連結され、固定接触子15A及び15Bに上方から対向している1枚の板状の可動接触子26と、接点支え23の上部に連結されて可動接触子26に対して下方に向けてばね付勢力を付与する接圧スプリング27と、磁極板21g,21hと連結部24との間に複数配置され、可動鉄心21iを固定鉄心21a,21bから離れる方向に付勢する復帰スプリング28とを備えている。
可動接点機構22は、接点支え23及び電磁石装置21の可動鉄心21iを固定する連結部24を備えて上下方向に移動自在に配置された可動接点ホルダ25と、可動接点ホルダ25の上部に連結され、固定接触子15A及び15Bに上方から対向している1枚の板状の可動接触子26と、接点支え23の上部に連結されて可動接触子26に対して下方に向けてばね付勢力を付与する接圧スプリング27と、磁極板21g,21hと連結部24との間に複数配置され、可動鉄心21iを固定鉄心21a,21bから離れる方向に付勢する復帰スプリング28とを備えている。
上記構成を有する電磁接触器10は、図1に示す固定接触子15A及び15Bに対して可動接触子26が上方に離間した開極状態で、固定鉄心21a,21bの操作コイル21d,21eに電流を流すことで固定鉄心21a,21bの透磁率により強い磁束を発生させる。固定鉄心21a,21bに発生した強い磁束により可動鉄心21iに対する吸引力が固定鉄心21a,21bに発生する。なお、吸引力は操作コイル21d,21eに流すコイル電流と操作コイル21d,21eに巻かれた巻線回数との積に比例する。
操作コイル21d,21eを駆動開始後一定時間経て固定鉄心21a,21bに発生する吸引力により、可動鉄心21iが下方に吸引され、図2に示すように、可動接触子26が固定接触子15A及び15Bに接圧スプリング27の接触圧で接触する。このため、電磁接触器10が閉極状態となり、外部供給電源17の電力が負荷装置18に供給される。
また、電磁接触器10は、操作コイル21d及び21eに電流を流すために、図3に示す操作コイル駆動装置30を内蔵している。
また、電磁接触器10は、操作コイル21d及び21eに電流を流すために、図3に示す操作コイル駆動装置30を内蔵している。
この操作コイル駆動装置30は、単相交流電源または三相交流電源であるコイル電源31が運転スイッチ32を介して接続される整流回路33を備えている。運転スイッチ32は、電磁接触器10をオン状態(閉極状態)とオフ状態(開極状態)に制御する外部からの切り替え信号によって制御される。整流回路33は、コイル電源31の形式に応じた数の整流ダイオードなどで構成され、以下の各回路に交流電圧を整流した直流電圧を正極側ラインLp及び負極側ラインLnを介して供給する。
また、操作コイル駆動装置30は、整流回路33の正極側ラインLp及び負極側ラインLn間に接続された入力電圧検出回路34と正極側ラインLp及び負極側ラインLn間に接続された電源回路35及び駆動制御部36とを備えている。入力電圧検出回路34は例えば抵抗素子による電圧分圧手段を用いて整流回路33の出力電圧を検出し駆動制御部36に供給する。電源回路35は、例えば電圧レギュレータ回路で構成され、整流回路33から出力される直流高電圧を駆動制御部36で使用する直流低電圧に変換する。ここで、整流回路33から出力される直流電圧が駆動制御部36で使用可能な直流低電圧である場合には、電源回路35を省略することができる。
さらに、操作コイル駆動装置30は、整流回路33の正極側ラインLp及び負極側ラインLn間に直列に接続された電磁接触器10の操作コイル21d及び21eと直列に接続された半導体スイッチング素子40と電流検出抵抗素子41とを備えている。すなわち、整流回路33の正極側ラインLpには、直列に接続された操作コイル21d、21eの一端が接続され、操作コイル21d、21eの他端には、半導体スイッチング素子40の高電位側電極が接続されている。半導体スイッチング素子40の低電位側電極及び負極側ラインLn間には、電流検出抵抗素子41が接続されている。
そして、操作コイル駆動装置30は、半導体スイッチング素子40の制御電極に接続されたパルス発生回路39を備えている。駆動制御部36から出力されるデューティ比信号SDutyは、パルス発生回路39に入力される。
また、操作コイル21d,21eには、還流回路を構成するダイオード素子42が並列接続されている。
また、操作コイル21d,21eには、還流回路を構成するダイオード素子42が並列接続されている。
上記構成を有する操作コイル駆動装置30は、電磁石装置21の操作コイル21d,21eに供給するコイル電流を適切に制御する回路である。
ここで、操作コイル駆動装置30は、一般には、可動鉄心21iを固定鉄心21a,21bに吸着させるように操作コイル21d,21eを駆動し、さらに、吸着状態を保持するように操作コイル21d,21eを駆動する。
ここで、操作コイル駆動装置30は、一般には、可動鉄心21iを固定鉄心21a,21bに吸着させるように操作コイル21d,21eを駆動し、さらに、吸着状態を保持するように操作コイル21d,21eを駆動する。
なお、可動鉄心21iを固定鉄心21a,21bに吸着させるようにする制御を閉路制御と称し、その後の吸着状態を保持する制御を保持制御と称す。また、可動鉄心21iを固定鉄心21a,21bから離間させる制御は開路制御と称す。
半導体スイッチング素子40は、例えば、MOS-FET(Metal Oxide Semiconductor-Field Effect Transistor)やバイポーラトランジスタなどで実現できるが、N型MOS-FETの場合は、半導体スイッチング素子40の前記制御電極がゲート端子に、高電位側電極がドレイン端子に、さらに、低電位側電極がソース端子にそれぞれ相当する。
半導体スイッチング素子40は、例えば、MOS-FET(Metal Oxide Semiconductor-Field Effect Transistor)やバイポーラトランジスタなどで実現できるが、N型MOS-FETの場合は、半導体スイッチング素子40の前記制御電極がゲート端子に、高電位側電極がドレイン端子に、さらに、低電位側電極がソース端子にそれぞれ相当する。
半導体スイッチング素子40は、パルス発生回路39からのオン・オフパルス信号によって整流回路33の出力直流電圧をスイッチングするようになっている。これによって、操作コイル21d,21eにコイル電流が流れる。このときに、操作コイル21d,21eの両端子には整流回路33の出力電圧から半導体スイッチング素子40の飽和電圧分と電流検出抵抗素子41の両端電圧とを差し引いた電圧が発生する。
ただし、一般的には、半導体スイッチング素子40としては、その飽和電圧が整流回路33の出力電圧に比べ充分小さな素子を選択する。これにより、半導体スイッチング素子の持つパッケージ熱抵抗の影響による素子破損を防止することができる。また、電流検出抵抗素子41は、投入パルス時に操作コイル21d,21eに流す大きな電流に耐えるように、抵抗×電流2が電流検出抵抗素子41のパッケージ耐熱温度を考慮し微小な抵抗値を選定する。さらに、電流検出抵抗素子41の両端子電圧が整流回路33の出力電圧に比べ充分小さな抵抗値を選定する。
半導体スイッチング素子40は、パルス発生回路39から供給されるオン・オフパルス信号によって整流回路33の出力直流電圧をスイッチングする。これによって、操作コイル21d,21eにコイル電流が流れる。コイル電流の大きさは、電源電圧と操作コイル21d,21eの抵抗値およびインダクタンス値と半導体スイッチング素子40のオン時間によって決まる。電流検出抵抗素子41は、操作コイル21d,21eに流れるコイル電流を検出し、駆動制御部36に出力する。
駆動制御部36は、可動鉄心21iを固定鉄心21a,21bに吸着させる閉路制御と、その後の吸着状態を維持する保持制御と、可動鉄心21iを固定鉄心21a,21bから釈放する開路制御を行う。この駆動制御部36の具体的構成は、図4に示すように、操作コイル21d,21eの抵抗値のばらつきやコイル温度上昇による操作コイル抵抗の変化など電源電圧以外の変動要因を正確に計測するために、例えばマイクロプロセッサで構成される演算処理回路36aを搭載している。
また、駆動制御部36は、電流検出抵抗素子41から入力されるアナログ電圧となるコイル電流をデジタル信号に変換するアナログ/デジタル変換器(以下、ADCと記載する)36bを搭載している。さらに、駆動制御部36は、演算処理回路36aおよびパルス発生回路39に、パルス幅変調(PWM)制御機能を持たせるため少なくとも2個の第1タイマ36c及び第2タイマ36dを搭載している。このうち第1タイマ36cはPWM周期を決定するタイマに使用し、またその周期は可聴周波数外の十数KHzを越えていることが望ましい。
また、第2タイマ36dは、半導体スイッチング素子40をオンさせて操作コイル21d,21eを励磁する時間を決定するのに使用する。この場合に、閉路制御時には決められたPWM周期に対し、第1タイマ36cで定める操作コイル21d,21eを励磁するオン・オフ時間比率(あるいは、デューティ(Duty)比)を閉路制御時には大きく設定し、保持制御時には小さく設定する。
また、駆動制御部36は、演算処理回路36aに接続された不揮発性メモリ36eを搭載している。この不揮発性メモリ36eは、後述する判定用軌跡を表す制御マップを格納している。
演算処理回路36aの具体的構成は、機能ブロックで表すと、図5に示すように、入力処理部51と、設定処理部52と、PID制御処理部53と、閉路状態判定部54とを備えている。
演算処理回路36aの具体的構成は、機能ブロックで表すと、図5に示すように、入力処理部51と、設定処理部52と、PID制御処理部53と、閉路状態判定部54とを備えている。
入力処理部51は、電流入力部51aと移動平均演算部51bとを備えている。電流入力部51aは、例えばサンプリング周期が20kHzに設定され、サンプリング周期毎に電流検出抵抗素子41から出力されるアナログ電圧のコイル電流検出値IFBを、ADC36bを介して取り込む。移動平均演算部51bは、電流入力部51aから入力されるコイル電流検出値IFBの20個分を移動平均する。したがって、この移動平均演算部51bから1kHz毎にコイル電流の移動平均値がコイル電流測定値PV(k) として出力される。
設定処理部52は、閉路制御に使用する判定用軌跡設定部52aと、保持制御に使用する保持制御用設定部52bと、選択スイッチ52cとを備えている。判定用軌跡設定部52aは、閉路制御時の操作コイル21d,21eに流れるコイル電流の軌跡に対応させた電流変化軌跡を表す投入駆動パターンを参照してコイル電流設定値をコイル電流設定値SVとして出力する。保持制御用設定部52bは、保持制御時に一定電流値の保持制御用コイル電流設定値をコイル電流設定値SVとして出力する。選択スイッチ52cは、後述する閉路状態判定部54からの選択信号SLがハイレベルであるときに判定用軌跡設定部52aを選択し、選択信号がローレベルであるときに保持制御用設定部52bを選択してPID制御処理部53へ出力する。
PID制御処理部53は、減算器53aと、PID演算部53bと、駆動信号形成部53cとを備えている。減算器53aには、入力処理部51から出力されるコイル電流測定値PV(k) と設定処理部52から出力されるコイル電流設定値SV(k) とが入力され、コイル電流設定値SV(k)からコイル電流測定値PV(k)を減算して電流偏差DV(k) を算出し、算出した電流偏差DV(k) をPID演算部53bに出力する。
PID演算部53bは、減算器53aから電流偏差DV(k)が入力されるとともに、入力処理部51からコイル電流測定値PV(k) が直接入力され、下記(1)式の演算を行なって操作出力の差分ΔMV(k) を算出し、算出した差分ΔMV(k) を駆動信号形成部53cに出力する。

ここで、
ΔMV(k-1) :kサンプリング時間とk-1サンプリング時間の「操作出力量」の差分
DV(k) :kサンプリング時間の偏差(PV(k) -SV(k) )
PV(k) :入力処理部51の出力(コイル電流IFB測定値)
SV(k) :設定処理部52の出力(コイル電流IFB設定値)
P:比例定数(Pパラメータ)
TI:積分時間(Iパラメータ)
TD :微分時間(Dパラメータ)
DT:サンプリング時間
である。
ΔMV(k-1) :kサンプリング時間とk-1サンプリング時間の「操作出力量」の差分
DV(k) :kサンプリング時間の偏差(PV(k) -SV(k) )
PV(k) :入力処理部51の出力(コイル電流IFB測定値)
SV(k) :設定処理部52の出力(コイル電流IFB設定値)
P:比例定数(Pパラメータ)
TI:積分時間(Iパラメータ)
TD :微分時間(Dパラメータ)
DT:サンプリング時間
である。
駆動信号形成部53cは、パルス幅変調(PWM)信号のプリセットデューティ比(PWM_Duty)MVsを設定するプリセットデューティ比設定部55と、PID演算部53bから操作出力量の差分ΔMVとプリセットデューティ比設定部55からプリセットデューティ比MVsが入力された積分演算部56で構成されている。積分演算部56では、プリセットデューティ比MVsを初期値として操作出力量の差分ΔMVを積分(加算)して操作量すなわちパルス幅変調信号のデューティ比(以下、PWMデューティ比と称す)MVを算出する。
ここで、駆動信号形成部53cで算出されるPWMデューティ比は、閉路制御開始時に、例えば使用定格の最低電圧の70%の電圧に対するPWMデューティ比を100%未満に設定しておき、加えて、使用定格の最高電圧の120%の電圧に対するPWMデューティ比に0%を超えるように設定しておけば、実使用上、広範囲の電源電圧に対して操作コイル21d,21eの電流軌跡に一致するように制御することで、安定した動作を実現することができる。具体的には、使用定格の最低電圧の70%の電圧に対するPWMデューティ比と、使用定格の最高電圧の120%の電圧に対するPWMデューティ比を使用する電圧に対して線形補間演算されたPWMデューティ比を使用すればよいことになる。
そして、駆動信号形成部53cで算出されたPWMデューティ比MVは、出力スイッチ53dの一方の入力端子を介してパルス発生回路39にPWM信号SPWMとして出力される。出力スイッチ53dの他方の入力端子にはプリセットデューティ比MVsが入力されている。この出力スイッチ53dは閉路状態判定部54からの選択信号SL2がハイレベルであるときに駆動信号形成部53cを選択し、ローレベルであるときにプリセットデューティ比設定部55を選択する。
閉路状態判定部54は、駆動信号形成部53cから出力されるPWMデューティ比MVと入力処理部51から出力されるコイル電流測定値PV(k) とが入力されている。
この閉路状態判定部54は、PWMデューティ比MVが予め設定した閾値MVth未満であるときにはハイレベルの選択信号SL1を設定処理部52の選択スイッチ52cに出力するとともに、ハイレベルの選択信号SL2をPID制御処理部53の出力スイッチ53dに出力する。
この閉路状態判定部54は、PWMデューティ比MVが予め設定した閾値MVth未満であるときにはハイレベルの選択信号SL1を設定処理部52の選択スイッチ52cに出力するとともに、ハイレベルの選択信号SL2をPID制御処理部53の出力スイッチ53dに出力する。
また、閉路状態判定部54は、PWMデューティ比MVが閾値MVth以上となったときに、その時点のコイル電流測定値PV(k) を基準値PVbとして演算処理回路36aに内蔵するメモリに記憶する。これと同時に、閉路状態判定部54は、選択信号SL2をローレベルとして出力スイッチ53dをプリセットデューティ比設定部55側に切替える。
さらに、閉路状態判定部54は、コイル電流測定値PV(k) が基準値PVbを超えたときに、可動接触子26が固定接触子15A,15Bに接触した後接圧スプリング27によって圧接されるワイプ状態を経て完全に接点閉極状態となったものと判定する。このとき、閉路状態判定部54は、ローレベルの選択信号SL1を設定処理部52の選択スイッチ52cに出力するとともに、ハイレベルの選択信号SL2をPID制御処理部53の出力スイッチ53dに出力する。
さらに、閉路状態判定部54は、コイル電流測定値PV(k) が基準値PVbを超えたときに、可動接触子26が固定接触子15A,15Bに接触した後接圧スプリング27によって圧接されるワイプ状態を経て完全に接点閉極状態となったものと判定する。このとき、閉路状態判定部54は、ローレベルの選択信号SL1を設定処理部52の選択スイッチ52cに出力するとともに、ハイレベルの選択信号SL2をPID制御処理部53の出力スイッチ53dに出力する。
次に、操作コイル駆動装置30の動作について駆動制御部36の演算処理回路36aで実行するコイル駆動制御処理を表す図6のフローチャート及び図7のタイミングチャートを伴って説明する。
先ず、設定処理部52で設定する閉路制御時のコイル電流の変化の軌跡を表す制御マップについて説明する。
先ず、設定処理部52で設定する閉路制御時のコイル電流の変化の軌跡を表す制御マップについて説明する。
電磁接触器10は、標準状態では、配電盤などの垂直板部に水平方向に配置した取付レールに下ケース11が端子板16Aを上方とし、端子板16Bを下方として取付けられる。したがって、固定鉄心21a,21bに対して可動鉄心21iが水平方向に可動し、可動接点ホルダ25が水平方向に可動する。このときの設置角度を基準値の±0°とする。
この標準状態では、運転スイッチ32がオフ状態であって、固定鉄心21a,21bの操作コイル21d,21eに通電されていない状態では、図1に示すように、可動鉄心21iが復帰スプリング28によって固定接触子15A,15Bから離間して釈放状態となっている。このため、可動接触子26も固定接触子15A,15Bから離間して開路状態となっている。
この標準状態では、運転スイッチ32がオフ状態であって、固定鉄心21a,21bの操作コイル21d,21eに通電されていない状態では、図1に示すように、可動鉄心21iが復帰スプリング28によって固定接触子15A,15Bから離間して釈放状態となっている。このため、可動接触子26も固定接触子15A,15Bから離間して開路状態となっている。
この状態で、一般的な閉路制御動作を説明すると、運転スイッチ32がオン状態となると、駆動制御部36が動作状態となって、パルス発生回路39にPWMデューティ比MVを出力し、このパルス発生回路39からオン・オフパルス信号が半導体スイッチング素子40に出力される。このため、半導体スイッチング素子40がオン・オフ動作することにより、図7(a)に細い実線図示の特性線L0で示すように、デューティ比に応じたコイル電流が操作コイル21d,21eに流れる。
このコイル電流は、初期状態で高い変化率で増加し、これによって固定鉄心21a,21bに吸引力が発生して、図7(d)に示すように、時点t1で可動鉄心21iが復帰スプリング28に抗して固定鉄心21a,21b側に移動を開始する。
その後、コイル電流は時点t2で一旦ピーク値を迎えた後減少し、この間に可動接触子26が固定接触子15A,15Bに接触し、次いで接圧スプリング27による接触圧が作用するワイプ状態となり、その後時点t3で可動接触子26が固定接触子15A,15Bに完全に接触する接点閉路状態となる。
その後、コイル電流は時点t2で一旦ピーク値を迎えた後減少し、この間に可動接触子26が固定接触子15A,15Bに接触し、次いで接圧スプリング27による接触圧が作用するワイプ状態となり、その後時点t3で可動接触子26が固定接触子15A,15Bに完全に接触する接点閉路状態となる。
この接点閉路状態となると、コイル電流が再度上昇を開始し、時点t4で保持制御が開始されることにより、コイル電流が保持電流まで減少する。
このように、コイル電流は、初期ピークまで上昇した後、一旦減少してから再度上昇して飽和状態となり、その後保持電流まで減少する変化となる軌跡を描くことになる。
ところで、電磁接触器10が固定鉄心21a,21b側に対して可動接触子26側が上方に傾いた設置角度が+30°の状態では、閉路制御開始時に図7(a)で一点鎖線図示の特性線L1で示すように初期状態のコイル電流のピーク値が高くなる。
このように、コイル電流は、初期ピークまで上昇した後、一旦減少してから再度上昇して飽和状態となり、その後保持電流まで減少する変化となる軌跡を描くことになる。
ところで、電磁接触器10が固定鉄心21a,21b側に対して可動接触子26側が上方に傾いた設置角度が+30°の状態では、閉路制御開始時に図7(a)で一点鎖線図示の特性線L1で示すように初期状態のコイル電流のピーク値が高くなる。
逆に、電磁接触器10が固定鉄心21a,21b側に対して可動接触子26側が下方に傾いた設置角度が-30°の状態では、閉路制御開始時に図7(a)で点線図示の特性線L2で示すように初期状態のコイル電流ピーク値が低くなる。
このため、コイル電流のピーク値が高くなる設置角度+30°の劣悪な設置状態でも動作可能とするには、閉路制御時に、図7(a)に示すように、特性線L1に余裕を持たせた太い実線図示の特性線L3の軌跡を基準にしてコイル電流を設定することにより、全ての設置状態で、電磁接触器10を正確に動作させることが可能となる。
このため、コイル電流のピーク値が高くなる設置角度+30°の劣悪な設置状態でも動作可能とするには、閉路制御時に、図7(a)に示すように、特性線L1に余裕を持たせた太い実線図示の特性線L3の軌跡を基準にしてコイル電流を設定することにより、全ての設置状態で、電磁接触器10を正確に動作させることが可能となる。
このため、この特性線L3に相当する軌跡を設定処理部52の判定用軌跡設定部52aの制御マップに設定し、不揮発性メモリ36eに記憶する。このとき、特性線L3は、ピーク値を超えた後に減少する軌跡となるが、制御マップでは、図5に示すように、ピーク値に至る軌跡をピーク値の手前から時間延長させた形で緩やかに連続的に上昇する軌跡として設定する。ここで、制御マップの横軸は、移動平均値を算出する回数mとし、縦軸はコイル電流設定値SVとする。
次に、上述した制御マップを使用した本実施形態の動作を説明する。
今、説明を簡単にするために、電磁接触器10が設置角度0°の標準設置状態で設置されているものとする。
前述したように、運転スイッチ32が図7の時点t1でオン状態に制御されると、駆動制御部36の演算処理回路36aが動作状態となり、図6に示すコイル駆動制御処理を実行する。
今、説明を簡単にするために、電磁接触器10が設置角度0°の標準設置状態で設置されているものとする。
前述したように、運転スイッチ32が図7の時点t1でオン状態に制御されると、駆動制御部36の演算処理回路36aが動作状態となり、図6に示すコイル駆動制御処理を実行する。
このコイル駆動制御処理では、先ず、最終的に移動平均値を算出するための処理回数を表す変数nを零にリセットし、最終的な移動平均値が算出された回数を表す変数mを零にリセットし、さらに後述する判定フラグFを“0”にリセットする(ステップS11)。
次いで、サンプリング周期にしたがって、電流検出抵抗素子41の端子電圧としてコイル電流検出値IFBを読込み(ステップS12)、読込んだコイル電流検出値IFBに基づいて移動平均処理を行なって移動平均値を算出する(ステップS13)。
次いで、サンプリング周期にしたがって、電流検出抵抗素子41の端子電圧としてコイル電流検出値IFBを読込み(ステップS12)、読込んだコイル電流検出値IFBに基づいて移動平均処理を行なって移動平均値を算出する(ステップS13)。
次いで、移動平均処理を行なった回数を表す変数nを“1”だけインクリメントしてから、変数nが設定値20に達したか否かを判定する(ステップS15)。この判定結果が、n<20であるときには、次のサンプリング周期となるまで読込みタイミングを調整し(ステップS16)、前述したステップS12に戻る。
一方、移動平均回数nが設定値20に達すると、最終的に算出された移動平均値をコイル電流測定値PV(k) として読込み(ステップS17)、次いで判定フラグFが“1”にセットされているか否かを判定する。この場合、ステップS11で判定フラグFが“0”にリセットされているので、ステップS19に移行して、最終的な移動平均値を算出した回数すなわちコイル電流測定値PV(k) を算出した回数を表す変数mを“1”だけインクリメントする(ステップS19)。
一方、移動平均回数nが設定値20に達すると、最終的に算出された移動平均値をコイル電流測定値PV(k) として読込み(ステップS17)、次いで判定フラグFが“1”にセットされているか否かを判定する。この場合、ステップS11で判定フラグFが“0”にリセットされているので、ステップS19に移行して、最終的な移動平均値を算出した回数すなわちコイル電流測定値PV(k) を算出した回数を表す変数mを“1”だけインクリメントする(ステップS19)。
そして、変数mをもとに制御マップに形成されたコイル電流の変化を表す軌跡である投入駆動パターンを参照してコイル電流設定値SV(k) を読込む(ステップS20)。次いで、コイル電流設定値SV(k)からコイル電流測定値PV(k) を減算してkサンプリング時間の電流偏差DV(k) (=SV(k) -PV(k) )を算出する(ステップS21)。このとき、半導体スイッチング素子40がまだオン・オフ駆動されておらず、コイル電流測定値PV(k) が零であるので、電流偏差DV(k) は正値となる。
次いで、算出した電流偏差DV(k)及びその前回値DV(k-1) 、コイル電流測定値PV(k) 及びその前回値PV(k-1) をもとに前述した(1)式のPID演算を行う(ステップS22)。これによって、kサンプリング時間とその前のk-1サンプリング時間との操作出力量の差分ΔMV(k) を算出する(ステップS22)。
このとき、k-1サンプリング時間の電流偏差DV(k-1) 及びコイル電流測定値PV(k-1) はともに零であるので、kサンプリング時間の電流偏差DV(k) 、コイル電流測定値PV(k) に基づいて操作出力量の差分ΔMV(k) が算出される。
このとき、k-1サンプリング時間の電流偏差DV(k-1) 及びコイル電流測定値PV(k-1) はともに零であるので、kサンプリング時間の電流偏差DV(k) 、コイル電流測定値PV(k) に基づいて操作出力量の差分ΔMV(k) が算出される。
次いで、この操作出力量の差分ΔMV(k) がプリセットデューティ比MVsを初期値として積分されてPWMデューティ比(PWM_Duty)MVが算出される(ステップS23)。そして、算出されたPWMデューティ比MVがパルス発生回路39に出力される。
このため、パルス発生回路39からPWMデューティ比MVに応じたオン・オフ時間比率のパルス信号が半導体スイッチング素子40の制御電極であるゲート電極に出力され、半導体スイッチング素子40がスイッチング制御される。この結果、操作コイル21d,21eに図7(a)に示すようにコイル電流が流れ始める。
このため、パルス発生回路39からPWMデューティ比MVに応じたオン・オフ時間比率のパルス信号が半導体スイッチング素子40の制御電極であるゲート電極に出力され、半導体スイッチング素子40がスイッチング制御される。この結果、操作コイル21d,21eに図7(a)に示すようにコイル電流が流れ始める。
その後、サンプリング周期の20分の1の周期でコイル電流検出値IFBの移動平均値が算出され、これがコイル電流測定値PV(k) として読込まれるとともに、変数mが“1”だけインクリメントされるので、制御マップの投入駆動パターンを参照して算出されるコイル電流設定値SV(k) も増加し、プリセットデューティ比MVsを初期値として操作出力量の差分ΔMV(k) も正値を維持することから操作コイル21d,21eに流れるコイル電流が図7(a)に示すように増加を継続する。
そして、時点t11でコイル電流の増加率が低下し始めると、コイル電流測定値PV(k) も減少することから操作出力量の差分ΔMV(k) も大きくなり、ステップS24で算出されるPWMデューティ比MV(k) も図7(b)に示すように増加する。
このとき、算出されるPWMデューティ比MV(k) が予め設定された閾値MVth以下であるので、図6のコイル駆動制御処理でステップS25からステップS16を経てステップS12に戻る。この間に、可動鉄心21iが固定鉄心21a,21bに吸引されて復帰スプリング28に抗して後方へ移動し始め、これに応じて可動接触子26と固定接触子15A,15Bとの間のギャップが徐々に減少する。
このとき、算出されるPWMデューティ比MV(k) が予め設定された閾値MVth以下であるので、図6のコイル駆動制御処理でステップS25からステップS16を経てステップS12に戻る。この間に、可動鉄心21iが固定鉄心21a,21bに吸引されて復帰スプリング28に抗して後方へ移動し始め、これに応じて可動接触子26と固定接触子15A,15Bとの間のギャップが徐々に減少する。
そして、時点t12でPWMデューティ比MV(k) が予め設定された閾値MVthを超えると、図6のコイル駆動制御処理で、ステップS25からステップS26へ移行して、時点t12で読込んだコイル電流測定値PV(k) を基準値PVbとしてメモリの所定記憶領域に記憶する(ステップS26)。
次いで、予め設定されたプリセットデューティ比MVsをパルス発生回路39に出力し(ステップS27)、次いで判定フラグFを“1”にセットし(ステップS28)、ステップS16を経てステップS12に戻る。
次いで、予め設定されたプリセットデューティ比MVsをパルス発生回路39に出力し(ステップS27)、次いで判定フラグFを“1”にセットし(ステップS28)、ステップS16を経てステップS12に戻る。
このため、次に移動平均値が算出されてコイル電流測定値PV(k) として読込まれたときに、判定フラグFが“1”にセットされているので、ステップS18からステップS29へ移行して、コイル電流測定値PV(k) がメモリの所定記憶領域に記憶されている基準値PVb以上となったか否かを判定する(ステップS29)。
コイル電流測定値PV(k) が基準値PVbより小さい場合には、ステップS16を経てステップS12に戻ることを繰り返す。この間に、図7(d)に示すように、時点t13で可動接触子26が固定接触子15A,15Bに接触し、接圧スプリング27による接触圧が増加されながら可動接点ホルダ25が後方に移動するワイプ状態となる。その後時点t14で可動接触子26が固定接触子15A,15Bに完全に接触する接点閉路状態となる。
コイル電流測定値PV(k) が基準値PVbより小さい場合には、ステップS16を経てステップS12に戻ることを繰り返す。この間に、図7(d)に示すように、時点t13で可動接触子26が固定接触子15A,15Bに接触し、接圧スプリング27による接触圧が増加されながら可動接点ホルダ25が後方に移動するワイプ状態となる。その後時点t14で可動接触子26が固定接触子15A,15Bに完全に接触する接点閉路状態となる。
その後、時点t15でコイル電流測定値PV(k) が基準値PVb以上となると、接点閉路状態であると判断して保持モード処理に移行する(ステップS30)。この保持モード処理では、PWMデューティ比が小さい値に設定されて、ステップS20~ステップS24と同様のPID制御演算が行われるので、少ないコイル電流で固定鉄心21a,21bによる可動鉄心21iの吸着状態が保持される。この保持制御が、運転スイッチ32がオフ状態となるまで繰り返される。
そして、運転スイッチ32がオフ状態となると、コイル駆動制御処理を終了してパルス発生回路39へのPWMデューティ比MV(k) の出力を停止して操作コイル21d,21eへの通電を停止する。このため、固定鉄心21a,21bの吸引力がなくなり、可動鉄心21iが復帰スプリング28の弾発力によって固定鉄心21a,21bから離間して釈放状態となる。これに応じて、可動接点ホルダ25が前方へ移動して可動接触子26が固定接触子15A,15Bから離間して開路状態となる。
また、電磁接触器10の設置角度が+30°となって、コイル電流が増加する場合でも、判定用軌跡設定部52aで設定した投入駆動電流パターンが設置角度+30°のコイル電流の変化する軌跡より大きな軌跡に設定されているので、コイル電流測定値PV(k) が投入駆動電流パターンからの逸脱する際に生じるPWMデューティ比MVの大きな変動を確実に検出することができ、上述した標準設置状態と同様に接点閉路状態を確実に検出して閉路制御状態から保持制御状態に確実に移行させることができる。
さらに、電磁接触器10の設置角度が-30°である場合も上記と同様にして接点閉路状態を正確に判断して閉路制御から保持制御へ正確に移行することができる。
しかも、接点閉路状態を検出して直ぐに閉路制御から保持制御に移行するので、操作コイル21d,21eに流すコイル電流の消費量も少なくて済む。
なお、図6のコイル駆動制御処理において、ステップS12~ステップS16の処理が入力処理部51に対応し、ステップS19及びステップS20の処理とステップS30の処理の一部が判定用軌跡設定部に対応し、ステップS17、ステップS19~ステップS24の処理がPID制御処理部53に対応し、ステップS25~ステップS29の処理が閉路状態判定部54に対応している。
しかも、接点閉路状態を検出して直ぐに閉路制御から保持制御に移行するので、操作コイル21d,21eに流すコイル電流の消費量も少なくて済む。
なお、図6のコイル駆動制御処理において、ステップS12~ステップS16の処理が入力処理部51に対応し、ステップS19及びステップS20の処理とステップS30の処理の一部が判定用軌跡設定部に対応し、ステップS17、ステップS19~ステップS24の処理がPID制御処理部53に対応し、ステップS25~ステップS29の処理が閉路状態判定部54に対応している。
このように、上記実施形態によると、判定用軌跡設定部52aに閉路制御用のコイル電流変化の軌跡を表す変化投入駆動電流パターンを設定し、この投入駆動電流パターンから読出したコイル電流設定値SV(k) とコイル電流測定値PV(k) との電流偏差DVをPID制御演算してPWMデューティ比MVを算出する。そして、算出したPWMデューティ比MVをパルス発生回路39に出力して半導体スイッチング素子40をオン・オフ駆動して操作コイル21d,21eにコイル電流を流すようにしている。このため、コイル電流測定値PV(k) が投入駆動電流パターンから逸脱して電流偏差DVが大きくなると、PID制御演算によって算出されるPWMデューティ比MVが大きく変動することを利用して、このPWMデューティ比MVKの大きな変動を閉路状態判定部54で検出することができる。したがって、接点閉路状態を位置センサやタイマを用いることなく正確に検出することができる。
なお、本発明は、上記実施の形態に限定されるものではなく、種々の変形が可能である。例えば、半導体スイッチング素子40は操作コイル21d,21eと負極側ラインLnとの間に介挿する場合に限らず、操作コイル21d,21eと正極側ラインLpとの間に介挿するようにしてもよい。さらに、半導体スイッチング素子40と電流検出抵抗素子41とを入れ替えて、正極側ラインLp及び負極側ラインLn間に、操作コイル21d,21e、電流検出抵抗素子41及び半導体スイッチング素子40の順で直列に接続するようにしてもよい。
また、上記実施形態では、入力処理部51でコイル電流検出値IFBをサンプリングする毎に移動平均処理を行う場合について説明したが、これに限定されるものではなく、コイル電流検出値IFBを20個記憶しておき、これらを単純平均するようにしてもよい。
また、上記実施形態では、投入駆動電流パターンを制御マップとして記憶する場合について説明したが、これに限定されるものではなく、2次元の線形方程式として記憶しておき、演算によってコイル電流設定値SV(k) を算出するようにしてもよい。
また、上記実施形態では、投入駆動電流パターンを制御マップとして記憶する場合について説明したが、これに限定されるものではなく、2次元の線形方程式として記憶しておき、演算によってコイル電流設定値SV(k) を算出するようにしてもよい。
また、駆動制御部36としてはマイクロプロセッサ等の演算処理回路36aで構成する場合に限らず、論理回路、比較器、演算回路等を組み合わせて構成することもできる。
さらに、電磁接触器10の構成も図1及び図2の構成に限定されるものではなく、他の固定接触子に対して可動接触子が操作コイルによって接離可能に構成されていれば、他の種々の構成の電磁接触器に本発明を適用することができる。
さらに、電磁接触器10の構成も図1及び図2の構成に限定されるものではなく、他の固定接触子に対して可動接触子が操作コイルによって接離可能に構成されていれば、他の種々の構成の電磁接触器に本発明を適用することができる。
10…電磁接触器、11…下ケース、12…上ケース、13…消弧カバー、15A,15B…固定接触子、16A,16B…端子板、17…外部供給電源、18…負荷装置、21…電磁石装置、21a,21b…固定鉄心、21c…コイルホルダ、21d,21e…操作コイル、21f…ヨーク、21g,21h…磁極板、21i…可動鉄心、22…可動接点機構、23…接点支え、24…連結部、25…可動接点ホルダ、26…可動接触子、27…接圧スプリング、28…復帰スプリング、30…操作コイル駆動装置、31…コイル電源、32…運転スイッチ、33…整流回路、34…入力電圧検出回路、35…電源回路、36…駆動制御部、36a…演算処理回路、36b…アナログ/デジタル変換器(ADC)、36c…第1タイマ、36d…第2タイマ、36e…不揮発性メモリ、37…コイル電圧処理回路、38…コイル電流処理回路、39…パルス発生回路、40…半導体スイッチング素子、41…電流検出抵抗素子、51…入力処理部、51a…電流入力部、51b…移動平均演算部、52…設定処理部、52a…判定用軌跡設定部、52b…保持制御用設定部、52c…選択スイッチ、53…PID制御処理部、53a…減算器、53b…PID演算部、53c…駆動信号形成部、53d…出力スイッチ、54…閉路状態判定部、55…プリセットデューティ比設定部、56…積分演算部
Claims (7)
- 固定接触子に対して接離可能に配置された可動接触子を有し、前記可動接触子を可動させる可動鉄心を吸引する固定鉄心に巻かれた操作コイルに電源電圧をスイッチング制御して印可する電磁接触器と、
前記スイッチング制御により前記操作コイルを流れるコイル電流を検出する電流検出部と、
前記操作コイルに電源電圧をスイッチングして印可する半導体スイッチング素子のオン・オフ時間比率を閉路制御時に保持制御時に比較して大きくするように制御する駆動制御部とを備え、
前記駆動制御部は、前記閉路制御時に前記電流検出部で検出されるコイル電流の変化軌跡に沿って連続的に増加する判定用軌跡を設定する判定用軌跡設定部と、該判定用軌跡設定部の判定用軌跡と前記電流検出部で検出したコイル電流との偏差に基づいて前記可動接触子の前記固定接触子への接触による接点閉路状態を判定する閉路状態判定部とを備えていることを特徴とする電磁接触器の操作コイル駆動装置。 - 前記駆動制御部は、前記判定用軌跡設定部で設定された判定用軌跡に基づく設定電流と、前記電流検出部で検出したコイル電流との偏差をPID制御演算して操作出力量を算出するPID制御演算部と、該PID制御演算部の操作出力量に基づいて前記半導体スイッチング素子のオン・オフ時間比率を演算して当該半導体スイッチング素子に対してデューティ比信号を出力する駆動信号形成部とを備えていることを特徴とする請求項1に記載の電磁接触器の操作コイル駆動装置。
- 前記閉路状態判定部は、前記駆動信号形成部から出力されるデューティ比信号に基づいて前記可動接触子の前記固定接触子への吸着状態を判定することを特徴とする請求項2に記載の電磁接触器の操作コイル駆動装置。
- 前記駆動信号形成部は、出力するデューティ比信号が予め設定した閾値未満であるときに前記操作出力量に基づくデューティ比信号を出力し、前記デューティ比信号が予め設定した閾値以上となったときに予め設定したオン・オフ時間比率を固定した固定デューティ比信号を出力することを特徴とする請求項2に記載の電磁接触器の操作コイル駆動装置。
- 前記閉路状態判定部は、前記駆動信号形成部から出力されるデューティ比信号が前記閾値に達したときに、前記電流検出部で検出したコイル電流を基準値として記憶部に記憶し、前記電流検出部で検出したコイル電流が前記記憶部に記憶された基準値を超えたときに、接点閉路状態と判定することを特徴とする請求項4に記載の電磁接触器の操作コイル駆動装置。
- 前記駆動制御部は、前記閉路状態判定部の判定結果が接点閉路状態であるときに前記閉路制御から前記保持制御に切り換えることを特徴とする請求項5に記載の電磁接触器の操作コイル駆動装置。
- 前記判定用軌跡設定部は、前記閉路制御時に前記電磁接触器の取付状態にかかわらず前記操作コイルを励磁可能な前記コイル電流の変化する軌跡を時間延長した形で設定されていることを特徴とする請求項1に記載の電磁接触器の操作コイル駆動装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17766077.6A EP3432334A4 (en) | 2016-03-17 | 2017-01-27 | DRIVE DEVICE FOR AN ACTUATING COIL FOR ELECTROMAGNETIC PROTECTION |
| JP2018505314A JP6504311B2 (ja) | 2016-03-17 | 2017-01-27 | 電磁接触器の操作コイル駆動装置 |
| CN201780002877.6A CN107924786B (zh) | 2016-03-17 | 2017-01-27 | 电磁接触器的操作线圈驱动装置 |
| US15/938,829 US10262824B2 (en) | 2016-03-17 | 2018-03-28 | Operation coil drive device of electromagnetic contactor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016054020 | 2016-03-17 | ||
| JP2016-054020 | 2016-03-17 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/938,829 Continuation US10262824B2 (en) | 2016-03-17 | 2018-03-28 | Operation coil drive device of electromagnetic contactor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017159069A1 true WO2017159069A1 (ja) | 2017-09-21 |
Family
ID=59850782
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/002965 WO2017159069A1 (ja) | 2016-03-17 | 2017-01-27 | 電磁接触器の操作コイル駆動装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10262824B2 (ja) |
| EP (1) | EP3432334A4 (ja) |
| JP (1) | JP6504311B2 (ja) |
| CN (1) | CN107924786B (ja) |
| WO (1) | WO2017159069A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109741991A (zh) * | 2018-12-29 | 2019-05-10 | 深圳和而泰智能控制股份有限公司 | 一种控制继电器的方法、装置和电子设备 |
| JPWO2021075295A1 (ja) * | 2019-10-17 | 2021-04-22 |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107231013B (zh) * | 2016-05-24 | 2019-01-15 | 华为技术有限公司 | 一种充电的方法、终端、充电器和系统 |
| FR3054369B1 (fr) * | 2016-07-20 | 2022-05-27 | Zodiac Aero Electric | Contacteur electromagnetique dote de moyens de detection de la position ouverte ou fermee de commutateurs commandes |
| EP3288057A1 (de) * | 2016-08-26 | 2018-02-28 | Siemens Aktiengesellschaft | Sicherheitsgerichtetes schaltgerät |
| JP6808589B2 (ja) * | 2017-07-21 | 2021-01-06 | 株式会社東芝 | 発電システム |
| CN110048597B (zh) * | 2018-01-15 | 2021-01-15 | 株式会社村田制作所 | 功率因数校正电路的控制方法、控制器及系统 |
| CN110767502B (zh) * | 2018-07-27 | 2021-10-08 | 施耐德电气工业公司 | 用于调节线圈的电流的方法、控制器和系统 |
| US10982887B2 (en) * | 2018-11-20 | 2021-04-20 | Rheem Manufacturing Company | Expansion valve with selectable operation modes |
| JP6676200B1 (ja) * | 2019-01-30 | 2020-04-08 | マレリ株式会社 | リレー装置及びリレー装置の制御方法 |
| JP7232093B2 (ja) * | 2019-03-25 | 2023-03-02 | ルネサスエレクトロニクス株式会社 | 半導体装置 |
| JP6676226B1 (ja) * | 2019-05-22 | 2020-04-08 | 三菱電機株式会社 | 電磁操作装置 |
| CN110391113B (zh) * | 2019-06-28 | 2021-09-07 | 东南大学 | 电磁接触器、线圈电流控制方法、装置 |
| JP7351155B2 (ja) * | 2019-09-13 | 2023-09-27 | オムロン株式会社 | 電磁継電器 |
| CN113053696A (zh) * | 2019-12-26 | 2021-06-29 | 施耐德电气工业公司 | 用于接触器的控制电路及其控制方法 |
| CN114334546B (zh) * | 2021-12-30 | 2023-05-05 | 福州大学 | 接触器的无传感器分合闸位移跟踪控制系统及方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61250309A (ja) * | 1985-04-25 | 1986-11-07 | アウディ アクチェンゲゼルシャフト | 内燃機関用ガス交換弁の制御方法及び装置 |
| JPH11503862A (ja) * | 1995-02-03 | 1999-03-30 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 始動用リレーの回路装置 |
| JP2009127849A (ja) * | 2007-11-28 | 2009-06-11 | Toyota Motor Corp | 電磁アクチュエータの制御装置 |
| JP2009289690A (ja) * | 2008-05-30 | 2009-12-10 | Yazaki Corp | リレー制御装置 |
| JP2013026217A (ja) * | 2011-07-20 | 2013-02-04 | Ls Industrial Systems Co Ltd | 電磁接触器 |
| JP2015133298A (ja) * | 2014-01-15 | 2015-07-23 | 三菱電機株式会社 | 車載用リレー駆動回路および車載機器 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3549955A (en) * | 1969-08-19 | 1970-12-22 | T O Paine | Drive circuit for minimizing power consumption in inductive load |
| JPS6235424A (ja) | 1985-08-08 | 1987-02-16 | 富士通株式会社 | 電磁継電器駆動回路 |
| JP2573300B2 (ja) | 1987-08-05 | 1997-01-22 | 株式会社東芝 | 電磁石のコイル駆動装置 |
| US4878147A (en) * | 1987-08-05 | 1989-10-31 | Kabushiki Kaisha Toshiba | Electromagnetic coil drive device |
| JPH05101925A (ja) | 1991-10-09 | 1993-04-23 | Fuji Electric Co Ltd | 電磁石装置 |
| US5343351A (en) * | 1991-11-18 | 1994-08-30 | Electro-Tech, Inc. | Starter motor protection circuit with relay protection |
| JP3496982B2 (ja) * | 1994-07-15 | 2004-02-16 | 三菱電機株式会社 | 電磁接触器 |
| US5812355A (en) * | 1995-09-25 | 1998-09-22 | Nordson Corporation | Electric gun driver |
| DE29715925U1 (de) * | 1997-09-05 | 1997-10-23 | Festo Ag & Co | Schaltungsvorrichtung |
| US7740225B1 (en) * | 2000-10-31 | 2010-06-22 | Nordson Corporation | Self adjusting solenoid driver and method |
| JP2005050733A (ja) * | 2003-07-30 | 2005-02-24 | Anden | リレー駆動回路 |
| CN101188174A (zh) * | 2007-12-11 | 2008-05-28 | 康佳集团股份有限公司 | 电器电源开关系统 |
| JP5660236B1 (ja) * | 2014-02-27 | 2015-01-28 | オムロン株式会社 | 電磁継電器の異常検出方法、電磁継電器の異常検出回路、及び、異常検出システム |
-
2017
- 2017-01-27 EP EP17766077.6A patent/EP3432334A4/en not_active Withdrawn
- 2017-01-27 JP JP2018505314A patent/JP6504311B2/ja active Active
- 2017-01-27 WO PCT/JP2017/002965 patent/WO2017159069A1/ja unknown
- 2017-01-27 CN CN201780002877.6A patent/CN107924786B/zh not_active Expired - Fee Related
-
2018
- 2018-03-28 US US15/938,829 patent/US10262824B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61250309A (ja) * | 1985-04-25 | 1986-11-07 | アウディ アクチェンゲゼルシャフト | 内燃機関用ガス交換弁の制御方法及び装置 |
| JPH11503862A (ja) * | 1995-02-03 | 1999-03-30 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 始動用リレーの回路装置 |
| JP2009127849A (ja) * | 2007-11-28 | 2009-06-11 | Toyota Motor Corp | 電磁アクチュエータの制御装置 |
| JP2009289690A (ja) * | 2008-05-30 | 2009-12-10 | Yazaki Corp | リレー制御装置 |
| JP2013026217A (ja) * | 2011-07-20 | 2013-02-04 | Ls Industrial Systems Co Ltd | 電磁接触器 |
| JP2015133298A (ja) * | 2014-01-15 | 2015-07-23 | 三菱電機株式会社 | 車載用リレー駆動回路および車載機器 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3432334A4 * |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109741991A (zh) * | 2018-12-29 | 2019-05-10 | 深圳和而泰智能控制股份有限公司 | 一种控制继电器的方法、装置和电子设备 |
| JPWO2021075295A1 (ja) * | 2019-10-17 | 2021-04-22 | ||
| WO2021075295A1 (ja) * | 2019-10-17 | 2021-04-22 | 三菱電機株式会社 | 電磁接触器 |
| JP7204000B2 (ja) | 2019-10-17 | 2023-01-13 | 三菱電機株式会社 | 電磁接触器 |
| US11735387B2 (en) | 2019-10-17 | 2023-08-22 | Mitsubishi Electric Corporation | Electromagnetic contactor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6504311B2 (ja) | 2019-04-24 |
| US20180218862A1 (en) | 2018-08-02 |
| JPWO2017159069A1 (ja) | 2018-06-21 |
| US10262824B2 (en) | 2019-04-16 |
| EP3432334A1 (en) | 2019-01-23 |
| CN107924786A (zh) | 2018-04-17 |
| EP3432334A4 (en) | 2019-03-20 |
| CN107924786B (zh) | 2019-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017159069A1 (ja) | 電磁接触器の操作コイル駆動装置 | |
| JP6504312B2 (ja) | 電磁接触器の操作コイル駆動装置 | |
| KR101852285B1 (ko) | 전자석 구동 장치 | |
| US10424449B2 (en) | Abnormality detection method for electromagnetic relay, abnormality detection circuit for electromagnetic relay, and abnormality detection system | |
| US5930104A (en) | PWM relay actuator circuit | |
| JPH0831288A (ja) | 電磁接触器およびその制御方法 | |
| JP2009289671A (ja) | リレー制御装置 | |
| US20210082646A1 (en) | Electromagnetic relay | |
| US7902947B2 (en) | Electromagnetic contactor | |
| JP2008186645A (ja) | 電磁リレー駆動装置 | |
| JP4080313B2 (ja) | 電磁接触器のコイル駆動回路 | |
| JP5077059B2 (ja) | 磁気軸受装置 | |
| JP4283312B2 (ja) | 直流電圧駆動型マグネットコンタクタの駆動回路および電力変換装置 | |
| RU2639306C2 (ru) | Способ управления контактором и блок управления | |
| JP7204000B2 (ja) | 電磁接触器 | |
| JP6665742B2 (ja) | 負荷駆動装置 | |
| JP2001281029A (ja) | 電磁流量計 | |
| JP2015505283A (ja) | 搭載電源網システムおよび搭載電源網システムの動作方法 | |
| JP7053193B2 (ja) | アクチュエータ・デバイス、関連するアクチュエータ・デバイスおよび関連するスイッチング・ユニットを制御するための方法 | |
| KR20100011938U (ko) | 하이브리드 자동차용 반도체 릴레이 | |
| JP2016205867A (ja) | 漏電検出装置 | |
| JP2006108042A (ja) | 電磁開閉装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2018505314 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17766077 Country of ref document: EP Kind code of ref document: A1 |