WO2015019948A1 - ブラシレスモータ - Google Patents
ブラシレスモータ Download PDFInfo
- Publication number
- WO2015019948A1 WO2015019948A1 PCT/JP2014/070311 JP2014070311W WO2015019948A1 WO 2015019948 A1 WO2015019948 A1 WO 2015019948A1 JP 2014070311 W JP2014070311 W JP 2014070311W WO 2015019948 A1 WO2015019948 A1 WO 2015019948A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rotor core
- core
- magnet
- rotor
- brushless motor
- Prior art date
Links
- 230000004323 axial length Effects 0.000 claims description 39
- 230000002093 peripheral effect Effects 0.000 claims description 11
- 229910000831 Steel Inorganic materials 0.000 claims description 10
- 239000010959 steel Substances 0.000 claims description 10
- 238000010030 laminating Methods 0.000 claims description 7
- 239000000696 magnetic material Substances 0.000 claims description 5
- 230000004907 flux Effects 0.000 description 29
- 230000009467 reduction Effects 0.000 description 6
- 239000012212 insulator Substances 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 239000000463 material Substances 0.000 description 3
- 229920003002 synthetic resin Polymers 0.000 description 3
- 239000000057 synthetic resin Substances 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000005415 magnetization Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/24—Rotor cores with salient poles ; Variable reluctance rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/276—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/16—Stator cores with slots for windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Definitions
- the present invention relates to a cogging reduction technique for a brushless motor, and more particularly to reduction of cogging in a magnet embedded motor (IPM motor: Interior ⁇ ⁇ ⁇ Permanent Magnet Motor).
- IPM motor Interior ⁇ ⁇ ⁇ Permanent Magnet Motor
- IPM motor magnet-embedded brushless motor
- a magnet is embedded in the rotor and the rotor is rotated by both the magnet torque generated by the magnetic force of the magnet and the reluctance torque generated by the magnetization of the rotor
- IPM motor can utilize reluctance torque in addition to magnet torque, it becomes a motor with high efficiency and high torque.
- IPM motors are also increasingly used in hybrid cars and air conditioners.
- FIG. 7 is an explanatory diagram showing the configuration of the IPM motor.
- the IPM motor 51 is also provided with a stator 52 on the outer side and a rotor 53 on the inner side, similarly to a normal electric motor.
- the stator 52 includes a stator core 54 in which a large number of thin steel plate materials are laminated, and a coil 55 wound around a tooth (not shown) of the stator core 54.
- the rotor 53 has a rotor core 57 fixed to the shaft 56 and a magnet 58 embedded in the rotor core 57.
- the rotor core outer peripheral portion 57a is located outside the magnet 58 and also functions as a pseudo magnetic pole.
- the IPM motor 51 rotates the rotor 53 using both magnet torque and reluctance torque.
- a rotor core outer peripheral portion 57 a made of a magnetic material is interposed between the magnet 58 and the stator 52.
- the magnetic flux is likely to concentrate due to the three-dimensional magnetic flux leakage from the magnet end face (P portion in FIG. 7), and the magnetic flux density varies in the axial direction.
- a magnetic flux concentrating portion (Q portion in FIG. 7) is generated at the end portions thereof, so that the variation in the magnetic flux density in the axial direction is further increased. As a result, cogging during rotor rotation increases.
- the brushless motor of the present invention includes a stator having a stator core formed of a magnetic material, a rotor core that is rotatably disposed inside the stator and formed of a magnetic material, and a plurality of stator cores fixed in the rotor core.
- a rotor including a magnet, and the rotor core includes a core body fixed to a rotor shaft, and the magnet is provided at equal intervals along a circumferential direction of the core body.
- a plurality of magnet mounting portions to be accommodated wherein the axial length Lr of the rotor core is longer than the axial length Lm of the magnet (Lr> Lm), and the axial length Ls of the stator core is The rotor core is longer than the axial length Lr (Ls> Lr).
- first overhang portions are provided that extend along the axial direction from the axial end portion of the magnet without facing the magnet, and at both end portions of the stator core, You may provide the 2nd overhang part which protruded along the axial direction from the axial direction edge part of the said rotor core, without facing the said rotor core.
- a 1st overhang part suppresses the magnetic flux which flows in into a rotor core from the axial direction end surface of a magnet, and equalizes the magnetic flux density in a rotor core.
- the second overhang portion suppresses the magnetic flux flowing into the stator core from the axial end surface of the rotor core, and makes the magnetic flux density uniform in the stator core.
- the axial lengths X1 and X2 of the first and second overhang portions may be set to be greater than 0 to 1.0 mm or less, and the axial lengths of the first and second overhang portions may be set in the axial direction.
- the rotor core may be provided with a plurality of salient pole portions formed on the outer peripheral side of the magnet mounting portion and disposed on the outer peripheral portion of the rotor.
- a rotor core having a core body fixed to the rotor shaft and a magnet mounting portion provided on the core body is used.
- the axial length Lr of the rotor core is set longer than the axial length Lm of the magnet (Lr> Lm), and the axial length Ls of the stator core is set longer than the axial length Lr of the rotor core (Ls> Lr).
- FIG. 2 is a cross-sectional view taken along line AA in FIG. It is explanatory drawing which shows the relationship of each axial direction length of a magnet, a rotor core, and a stator core. It is explanatory drawing which shows the relationship between the amount X1 of rotor core overhangs with respect to a magnet, cogging torque, and output torque. It is explanatory drawing which shows the relationship between the overhanging amount X2 of the stator core with respect to a rotor core, a cogging torque, and an output torque. It is explanatory drawing which shows the example of the other IPM motor which can apply this invention. It is explanatory drawing which shows the structure of an IPM motor.
- FIG. 1 is a cross-sectional view of a brushless motor 1 (hereinafter abbreviated as motor 1) according to an embodiment of the present invention.
- FIG. 2 is a sectional view taken along line AA in FIG.
- the motor 1 is an IPM type brushless motor that rotates a rotor by a reluctance torque based on an inductance difference and a magnet torque generated by a magnetic force of a magnet. As shown in FIG.
- the motor 1 is an inner rotor type brushless motor in which a stator (stator) 2 is arranged on the outside and a rotor (rotor) 3 is arranged on the inside.
- the motor 1 is a flat IPM motor that satisfies D / L> 1, and is used as a drive source of the electric power steering apparatus.
- the stator 2 is fixed inside a bottomed cylindrical motor case 4 (hereinafter abbreviated as case 4).
- the stator 2 includes a stator core 5, a stator coil 6 (hereinafter abbreviated as a coil 6), and a bus bar unit (terminal unit) 7.
- the coil 6 is wound around a plurality of teeth 9 of the stator core 5 via an insulator 11.
- Bus bar unit 7 is attached to stator core 5 and electrically connected to coil 6.
- nine tooth portions 9 are provided.
- the coil 6 is disposed in nine slots between the adjacent tooth portions 9.
- the case 4 is formed in a bottomed cylindrical shape with iron or the like.
- An aluminum die cast bracket 8 is attached to the opening of the case 4 by a fixing screw (not shown).
- the stator core 5 has a plurality of teeth 9 projecting radially inward.
- a slot 10 is formed between adjacent teeth 9.
- a coil 6 is accommodated in the slot 10.
- a synthetic resin insulator 11 is attached to the stator core 5.
- a coil 6 is wound around the outside of the insulator 11.
- a bus bar unit 7 positioned by an insulator 11 is attached to one end side in the axial direction of the stator core 5.
- the bus bar unit 7 includes a synthetic resin main body portion and a copper bus bar insert-molded in the main body portion.
- connection terminal 12 project in the radial direction.
- the connection terminal 12 is welded to the end portion 6 a of each coil 6 drawn from the stator core 5.
- the number of bus bars corresponding to the number of phases of the motor 1 here, three for U phase, V phase, W phase and one for connecting each phase
- Each coil 6 is electrically connected to a connection terminal 12 corresponding to the phase.
- the stator core 5 is fixed in the case 4 by fixing means such as press fitting or adhesion.
- the rotor 3 is inserted into the stator 2 so as to be concentric with the stator 2.
- the rotor 3 has a rotor shaft 13.
- the rotor shaft 13 is rotatably supported by bearings 14a and 14b.
- the bearing 14 a is fixed to the bottom center of the case 4.
- the bearing 14 b is fixed to the center portion of the bracket 8.
- a cylindrical rotor core 15 and a rotor (resolver rotor) 22 of a resolver 21 serving as a rotation angle detection unit are attached to the rotor shaft 13.
- a stator (resolver stator) 23 of the resolver 21 is accommodated in a resolver holder 24a.
- the resolver holder 24a is fixed to the inner side of the bracket 8 by a mounting screw 25 via a resolver bracket 24b made of synthetic resin.
- a plurality of magnet mounting holes (magnet mounting portions) 31 are provided on the outer peripheral portion of the rotor core 15 along the circumferential direction.
- the magnet mounting hole 31 penetrates the rotor core 15 in the axial direction.
- the magnets 16 are accommodated and fixed in the magnet mounting holes 31 respectively.
- a salient pole portion 32 is formed on the outer peripheral side of each magnet 16.
- Six magnets 16 are arranged along the circumferential direction, and the motor 1 has a 6-pole 9-slot configuration.
- a gap 33 is formed in the magnet mounting hole 31.
- the gap 33 is formed on both sides of the magnet 16 in the circumferential direction and functions as a flux barrier that hardly allows magnetic flux to pass. Between the adjacent salient pole portions 32, a bridge portion 34 for connecting the core body 15a and the salient pole portion 32 is provided.
- stator core plate 17 of the stator core 5 and the rotor core plate 18 of the rotor core 15 are both formed by laminating electromagnetic steel plates having a thickness of 0.5 mm. Accordingly, both plates 17 and 18 can be press-molded from the same blank material, and various physical properties such as magnetic flux characteristics are substantially equal.
- the axial length of the rotor core 15 is longer than the axial length of the magnet 16 and the stator core is longer than the axial length of the rotor core 15 in order to suppress the wraparound of the magnetic flux from the axial end face side.
- the axial length of 5 is set longer (magnet length ⁇ rotor core length ⁇ stator core length).
- the axial direction of the rotor core 15 means that at least the axial length of the salient pole portion 32 located outside the magnet 16 is longer than that of the magnet 16. That is, in the rotor core 15, the axial length of the core body 15 a located on the inner peripheral side with respect to the magnet 16 is not necessarily longer than that of the magnet 16. Therefore, for example, in order to reduce the weight and reduce the inertia, the core body 15a inside the magnet 16 can be shortened by cutting or the like.
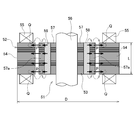
- FIG. 3 is an explanatory diagram showing the relationship between the axial lengths of the magnet 16, the rotor core 15, and the stator core 5 in the motor 1.
- the dimensional relationship is exaggerated to clearly show the features of the present invention.
- the axial length Lr of the rotor core 15 is longer than the axial length Lm of the magnet 16 (Lr> Lm).
- the axial length Ls of the stator core 5 is longer than the axial length Lr of the rotor core 15 (Ls> Lr).
- a first overhang portion 41 (overhang amount X1) that does not face the magnet 16 is formed at both ends of the rotor core 15.
- a second overhang portion 42 (overhang amount X2) that does not face the rotor core 15 is also formed at both ends of the stator core 5.
- the overhang portions 41 and 42 are equally distributed at the end portions in the axial direction, not at one end portion in the axial direction of the rotor core 15 or the stator core 5.
- the difference between Lr and Lm is set to be larger than the minimum value of the difference between the two considering the dimensional tolerances of Lr and Lm.
- the difference between Ls and Lr is also set to be larger than the minimum value of the difference between the two considering the dimensional tolerances of Ls and Lr. Therefore, even if the axial length of each component varies and the tolerances are accumulated, the overhang portions 41 and 42 are secured.
- the overhang amounts X1 and X2 in the overhang portions 41 and 42 can be adjusted as appropriate by changing the plate thickness and the number of stacked layers of the thin plate materials constituting the stator core 5 and the rotor core 15.
- the magnetic flux from the rotor core 15 flows into the inner surface side of the stator core 5.
- the magnetic flux from the rotor core 15 also flows into the overhang portion 42 that is the inner surface of the stator core 5 at the axial end portion of the salient pole 32.
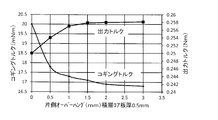
- FIG. 4 is an explanatory diagram showing the relationship between the overhang amount X1 (one-side overhang amount), the cogging torque, and the output torque in the motor 1.
- the overhang portion 41 when the overhang portion 41 is provided, the cogging decreases rapidly. The cogging is remarkably reduced until the overhang amount X1 is 0.5 to 1 mm (the plate thickness tr of the rotor core plate 18 to about twice the plate thickness tr).
- the overhang amount X1 exceeds 1 mm, the cogging reduction amount is reduced, and thereafter, the state becomes almost flat.
- the output torque gradually increases until the overhang amount X1 is about 1 mm, and then becomes substantially level. If the overhang amount X1 is increased, the motor becomes larger. Therefore, from the viewpoint of reducing the size and weight of the motor, X1 is preferably as small as possible. Therefore, considering the effect of the overhang portion 41, the overhang amount X1 is preferably about 1 mm as can be seen from FIG.
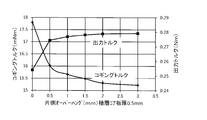
- FIG. 5 is an explanatory diagram showing the relationship between the overhang amount X2 (one-side overhang amount), the cogging torque, and the output torque in the motor 1.
- the overhang amount X2 exceeds 1 mm, the cogging reduction amount is reduced, and thereafter, the state becomes almost flat.
- the output torque gradually increases until the overhang amount X2 is about 1 mm, and then becomes substantially level. If the overhang amount X2 is increased, the motor becomes larger, so that a small value is preferable as described above. Therefore, considering the effect of the overhang portion 42, as can be seen from FIG. 5, the overhang amount X2 is preferably about 1 mm.
- the magnetic fluxes flowing from the magnet 16 to the rotor core 15 and from the rotor core 15 to the stator core 5 are equalized along the axial direction. As a result, the magnetic flux density in the axial direction is made uniform, and cogging due to the deviation of the magnetic flux density is reduced.
- the cogging torque can be reduced only by changing the axial dimensions of the rotor core 15 and the stator core 5 without greatly increasing the size of the motor.
- cogging can be easily and effectively reduced.
- the settings of the overhang portions 41 and 42 can be easily adjusted by changing the plate thickness and the number of stacked layers of the stator core plate 17 and the rotor core plate 18. Therefore, the motor characteristics can be easily improved without significantly changing the conventional configuration.
- the present invention is not limited to the above-described embodiment, and various modifications can be made without departing from the scope of the invention.
- an example in which the present invention is applied to an IPM motor having a configuration as shown in FIG. 2 has been described.
- the present invention is applicable to all magnet-embedded motors.
- the present invention can also be applied to an IPM motor having a configuration as shown in FIGS.
- FIGS In the above-described embodiment, an example is shown in which the plate thickness of both the stator core plate 17 and the rotor core plate 18 is 0.5 mm.
- the plate thickness of both plates is not limited to 0.5 mm.
- both the stator core plate 17 and the rotor core plate 18 may not have the same thickness.
- the overhang amounts X1 and X2 are preferably about 1 to 2 on the basis of the thickness of the rotor core plate 18.
- the present invention can be widely applied to other in-vehicle electric devices, electric products such as hybrid vehicles, electric vehicles, and air conditioners, in addition to the drive source of the electric power steering device.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Brushless Motors (AREA)
Abstract
ブラシレスモータ1は、ステータコアプレート17を複数枚積層したステータコア5を備えるステータ2と、ロータコアプレート18を複数枚積層したロータコア15を備えるロータ3を有する。ロータコア15は、コア本体15aと、マグネット16が収容されるマグネット取付孔31と、マグネット取付孔31の外周側に形成された突極部32とを有する。ロータコア15の軸方向長Lrは、マグネット16の軸方向長Lmよりも長く(Lr>Lm)、ロータコア15の両端部には第1オーバーハング部41が形成される。ステータコア5の軸方向長Lsは、ロータコア15の軸方向長Lrよりも長く(Ls>Lr)、ステータコア5の両端部には第2オーバーハング部42が形成される。
Description
本発明は、ブラシレスモータのコギング低減技術に関し、特に、マグネット埋め込み式のモータ(IPMモータ:Interior Permanent Magnet Motor)におけるコギングの低減に関する。
近年、ロータ内部に磁石を埋め込み、マグネットの磁力によるマグネットトルクと、ロータの磁化によるリラクタンストルクの両方によってロータを回転させるマグネット埋め込み式のブラシレスモータ(IPMモータ)の利用が拡大している。IPMモータは、マグネットトルクに加えてリラクタンストルクを活用できるため、高効率で高トルクなモータとなる。IPMモータは、自動車用電動パワーステアリング装置の駆動源として使用される他、ハイブリッド自動車やエアコン等への使用も増加している。
図7は、IPMモータの構成を示す説明図である。図7に示すように、IPMモータ51もまた、通常の電動モータと同様に、外側にステータ52、内側にロータ53が配されている。ステータ52は、多数の薄板鋼板材を積層したステータコア54と、ステータコア54のティース(図示せず)に巻装されたコイル55を有している。ロータ53は、シャフト56に固定されたロータコア57と、ロータコア57内に埋設されたマグネット58とを有している。IPMモータ51では、ロータコア外周部57aは、マグネット58の外側に位置し、擬似的な磁極としても作用する。IPMモータ51は、マグネットトルクとリラクタンストルクの両方を活用してロータ53を回転させる。
IPMモータでは、図7からも分かるように、マグネット58とステータ52との間に、磁性体からなるロータコア外周部57aが介在している。マグネット58とロータコア外周部57aの間では、マグネット端面からの3次元的な磁束漏れにより、磁束が集中し易く(図7のP部)、軸方向に沿って磁束密度に高低のバラツキが生じる。ロータ53とステータ52の間においても、それらの端部に磁束集中部(図7のQ部)が生じるため、軸方向の磁束密度のバラツキがさらに大きくなる。その結果、ロータ回転時のコギングが増大する。特に、ステータコア外径Dとステータコア長Lが、D/L>1であるような扁平型IPMモータにおいては、ロータコア及びマグネット、ステータの軸長が短くなる為、ロータコア軸方向端部及びステータ軸方向端部への磁束の回り込み量が大きくなる。このため、軸方向の磁束密度のバラツキが顕著に現れるという問題があった。
本発明のブラシレスモータは、磁性材料にて形成されたステータコアを備えるステータと、前記ステータの内側に回転自在に配置され、磁性材料にて形成されたロータコアと、前記ロータコア内に固定された複数個のマグネットとを備えるロータと、を有してなるブラシレスモータであって、前記ロータコアは、ロータシャフトに固定されるコア本体と、該コア本体の周方向に沿って等間隔に設けられ前記マグネットが収容される複数個のマグネット取付部と、を有し、前記ロータコアの軸方向長Lrは、前記マグネットの軸方向長Lmよりも長く(Lr>Lm)、かつ、前記ステータコアの軸方向長Lsは、前記ロータコアの軸方向長Lrよりも長い(Ls>Lr)ことを特徴とする。
前記ブラシレスモータにおいて、前記ロータコアの両端部に、前記マグネットと対向することなく前記マグネットの軸方向端部から軸方向に沿って張り出した第1オーバーハング部を設けると共に、前記ステータコアの両端部に、前記ロータコアと対向することなく前記ロータコアの軸方向端部から軸方向に沿って張り出した第2オーバーハング部を設けても良い。第1オーバーハング部は、マグネットの軸方向端面からロータコア内に流れ込む磁束を抑制し、ロータコア内の磁束密度を均一化する。第2オーバーハング部は、ロータコアの軸方向端面からステータコア内に流れ込む磁束を抑制し、ステータコア内における磁束密度を均一化する。
また、前記第1及び第2オーバーハング部の軸方向の長さX1,X2を、0を超え~1.0mm以下に設定しても良く、前記第1及び第2オーバーハング部の軸方向の長さX1,X2を等しく(X1=X2)しても良い。
さらに、前記ロータコアを、薄板鋼板からなるロータコアプレートを複数枚積層して構成し、前記ロータコアの軸方向長Lrを、前記マグネットの軸方向長Lmよりも、前記ロータコアプレートの板厚tr×n(nは自然数)だけ長く(Lr=Lm+tr×n)しても良い。また、前記ステータコアを、薄板鋼板からなるステータコアプレートを複数枚積層して構成し、前記ステータコアの軸方向長Lsを、前記ロータコアの軸方向長Lrよりも、前記ステータコアプレートの板厚ts×n(nは自然数)だけ長く(Ls=Lr+ts×n)しても良い。さらに、前記ロータコアプレートの板厚trと前記ステータコアプレートの板厚tsを等しく(tr=ts)設定しても良い。加えて、前記ロータコアに、前記マグネット取付部の外周側に形成され前記ロータの外周部に配される複数の突極部を設けても良い。
本発明のブラシレスモータにあっては、ロータコアとして、ロータシャフトに固定されるコア本体と、該コア本体に設けられたマグネット取付部と、を有する構成のものを使用する。そして、ロータコアの軸方向長Lrをマグネットの軸方向長Lmよりも長く(Lr>Lm)、かつ、ステータコアの軸方向長Lsをロータコアの軸方向長Lrよりも長く(Ls>Lr)設定することにより、ロータコア内やステータコア内における磁束密度を均一化できる。従って、磁束密度の偏りによって生じるコギングを低減させることが可能となる。
以下、本発明の実施の形態を図面に基づいて詳細に説明する。本実施の形態の目的は、ロータ内部に磁石を埋め込んだ構成のいわゆるIPMモータにおいて、軸方向の磁束密度を均一化し、コギングの低減を図ることにある。図1は、本発明の一実施形態であるブラシレスモータ1(以下、モータ1と略記する)の断面図である。図2は、図1のA-A線に沿った断面図である。モータ1は、インダクタンス差に基づくリラクタンストルクと、マグネットの磁力によるマグネットトルクによりロータを回転させるIPM型のブラシレスモータである。モータ1は、図1に示すように、外側にステータ(固定子)2、内側にロータ(回転子)3を配したインナーロータ型のブラシレスモータとなっている。モータ1は、D/L>1となった扁平型IPMモータであり、電動パワーステアリング装置の駆動源として使用される。
ステータ2は、有底円筒形状のモータケース4(以下、ケース4と略記する)の内側に固定されている。ステータ2は、ステータコア5と、ステータコイル6(以下、コイル6と略記する)と、バスバーユニット(端子ユニット)7とから構成されている。コイル6は、ステータコア5の複数のティース部9に、インシュレータ11を介して巻装されている。バスバーユニット7は、ステータコア5に取り付けられ、コイル6と電気的に接続される。本実施の形態においては、ティース部9は9本設けられている。コイル6は、隣接するティース部9間の9つのスロット内に配置されている。ケース4は、鉄等にて有底円筒状に形成されている。ケース4の開口部には、図示しない固定ネジによって、アルミダイキャスト製のブラケット8が取り付けられる。
ステータコア5は、鋼製の薄板材であるステータコアプレート17(例えば、板厚ts=0.5mmの電磁鋼板)を多数積層して形成されている。ステータコア5には、複数個のティース部9が、径方向内側に向かって突設されている。隣接するティース部9の間には、スロット10が形成されている。スロット10の中にはコイル6が収容されている。ステータコア5には、合成樹脂製のインシュレータ11が取り付けられている。インシュレータ11の外側には、コイル6が巻装されている。ステータコア5の軸方向一端側には、インシュレータ11によって位置決めされたバスバーユニット7が取り付けられている。バスバーユニット7は、合成樹脂製の本体部と、本体部内にインサート成形された銅製のバスバーとから構成されている。
バスバーユニット7の周囲には、複数個の接続端子12が径方向に突設されている。バスバーユニット7の取り付けに際し、接続端子12は、ステータコア5から引き出された各コイル6の端部6aと溶接される。バスバーユニット7では、バスバーはモータ1の相数に対応した個数(ここでは、U相,V相,W相分の3個と、各相同士の接続用の1個の計4個)設けられている。各コイル6は、その相に対応した接続端子12と電気的に接続される。ステータコア5は、バスバーユニット7を取り付けた後、ケース4内に圧入又は接着等の固定手段により固定される。
ステータ2の内側には、ステータ2と同芯状にロータ3が挿入されている。ロータ3はロータシャフト13を有している。ロータシャフト13は、ベアリング14a,14bによって回転自在に軸支されている。ベアリング14aは、ケース4の底部中央に固定されている。ベアリング14bは、ブラケット8の中央部に固定されている。ロータシャフト13には、円筒形状のロータコア15と、回転角度検出手段であるレゾルバ21のロータ(レゾルバロータ)22が取り付けられている。レゾルバ21のステータ(レゾルバステータ)23は、レゾルバホルダ24aに収納される。レゾルバホルダ24aは、合成樹脂製のレゾルバブラケット24bを介して、取付ネジ25によってブラケット8の内側に固定される。
ロータコア15もまた、鋼製の薄板材であるロータコアプレート18(例えば、板厚tr=0.5mmの電磁鋼板)を多数積層して形成されている。ロータコア15の外周部には、周方向に沿って、複数個のマグネット取付孔(マグネット取付部)31が設けられている。マグネット取付孔31は、ロータコア15を軸方向に貫通している。マグネット取付孔31内には、それぞれマグネット16が収容固定される。各マグネット16の外周側には、突極部32が形成される。マグネット16は、周方向に沿って6個配置されており、モータ1は6極9スロット構成となっている。マグネット取付孔31内には、空隙部33が形成されている。空隙部33は、マグネット16の周方向両側に形成され、磁束が通りにくいフラックスバリアとして機能する。隣接する突極部32の間には、コア本体15aと突極部32とを連結するためのブリッジ部34が設けられている。
本実施の形態においては、上述のように、ステータコア5のステータコアプレート17と、ロータコア15のロータコアプレート18は、共に板厚0.5mmの電磁鋼板を積層して成形されている。従って、両プレート17,18は、同じブランク材から共取りでプレス成形可能な上、磁束特性等の各種物性が略均等となる。
ここで、従来のIPM型ブラシレスモータでは、前述のように、マグネットとステータとの間に磁性体が介在していることもあり、軸方向端面からの磁束の回り込みにより、コギングが増大するという問題があった。そこで、当該モータ1では、軸方向端面側からの磁束の回り込みを抑えるべく、マグネット16の軸方向長よりもロータコア15の軸方向長の方が長く、また、ロータコア15の軸方向長よりもステータコア5の軸方向長の方が長く設定されている(マグネット長<ロータコア長<ステータコア長)。なお、ロータコア15の軸方向は、少なくとも、マグネット16の外側に位置する突極部32の軸方向長がマグネット16よりも長いことを意味している。すなわち、ロータコア15において、マグネット16よりも内周側に位置するコア本体15aの軸方向長は、必ずしもマグネット16よりも長くなくとも良い。従って、例えば、軽量化・イナーシャ低減のため、マグネット16より内側のコア本体15aを切削等によって短くすることも可能である。
図3は、モータ1におけるマグネット16、ロータコア15、ステータコア5の各軸方向長の関係を示す説明図である。なお、図3では、本発明の特徴を明確に示すため寸法関係が誇張されている。図3に示すように、ロータコア15の軸方向長Lrは、マグネット16の軸方向長Lmよりも長くなっている(Lr>Lm)。ステータコア5の軸方向長Lsは、ロータコア15の軸方向長Lrよりも長くなっている(Ls>Lr)。ロータコア15の両端部には、マグネット16に対向しない第1オーバーハング部41(オーバーハング量X1)が形成される。ステータコア5の両端部にも、ロータコア15に対向しない第2オーバーハング部42(オーバーハング量X2)が形成される。オーバーハング部41,42は、ロータコア15やステータコア5の軸方向の片側端部ではなく、軸方向の端部に等分に配される。
LrとLmとの差は、Lr,Lmの寸法公差を考慮した両者の差の最小値よりも大きく設定されている。LsとLrとの差も、Ls,Lrの寸法公差を考慮した両者の差の最小値よりも大きく設定されている。従って、各部品の軸方向長がばらつき、その公差が集積しても、オーバーハング部41,42が確保される。オーバーハング部41,42におけるオーバーハング量X1,X2は、ステータコア5やロータコア15を構成する薄板材の板厚や積層枚数を変更することにより、適宜調整可能である。オーバーハング部41を設けると、マグネット16の端部からロータコア15の端部に回り込むような磁束がほとんど無くなる。図3の矢示F1のように、マグネット16からの磁束は、突極部32の内面側に流れ込む。その結果、マグネット16の軸方向端部においても、マグネット16からの磁束は、突極部32の内側面であるオーバーハング部41に流れ込む。ロータコア15とステータコア5間においても、オーバーハング部42により、ロータコア15の端部からステータコア5の端部に回り込むような磁束はほとんど無くなる。図3の矢示F2のように、ロータコア15からの磁束は、ステータコア5の内面側に流れ込む。その結果、突極32の軸方向端部においても、ロータコア15からの磁束は、ステータコア5の内側面であるオーバーハング部42に流れ込む。
マグネット16とロータコア15の間に設けられるオーバーハング部41について、オーバーハング量X1とコギング低減効果を見ると、発明者らの実験では、図4のような結果が得られた。図4は、モータ1におけるオーバーハング量X1(片側オーバーハング量)とコギングトルク及び出力トルクとの関係を示す説明図である。図4に示すように、オーバーハング部41を設けるとコギングは急減する。コギングは、オーバーハング量X1が0.5~1mm(ロータコアプレート18の板厚tr~板厚trの2倍程度)までは顕著に低下する。オーバーハング量X1が1mmを超えると、コギング低下量は低減し、その後、ほぼ横ばい状態となる。出力トルクは、オーバーハング量X1が1mm程度までは漸増し、その後、ほぼ横ばい状態となる。オーバーハング量X1を長くするとモータ大きくなるため、モータの小型軽量化の観点からは、X1はなるべく小さな値が好ましい。従って、オーバーハング部41の効果を考えると、図4からも分かるように、オーバーハング量X1は1mm程度までが好ましい。
次に、ロータコア15とステータコア5の間に設けられるオーバーハング部42について、オーバーハング量X2とコギング低減効果を見ると、発明者らの実験では、図5のような結果が得られた。図5は、モータ1におけるオーバーハング量X2(片側オーバーハング量)とコギングトルク及び出力トルクとの関係を示す説明図である。図5の場合も図4の場合と似たような傾向が見られ、オーバーハング部42を設けるとコギングは急減する。コギングは、オーバーハング量X2が0.5~1mm(ステータコアプレート17の板厚ts~板厚tsの2倍程度:本実施例ではts=tr)までは顕著に低下する。オーバーハング量X2が1mmを超えると、コギング低下量は低減し、その後、ほぼ横ばい状態となる。出力トルクは、オーバーハング量X2が1mm程度までは漸増し、その後、ほぼ横ばい状態となる。オーバーハング量X2を長くするとモータが大きくなるため、前述同様、小さな値が好ましい。従って、オーバーハング部42の効果を考えると、図5からも分かるように、オーバーハング量X2は1mm程度までが好ましい。
図4,5から得られた結果をまとめると、オーバーハング量X1,X2は共に1mm程度までが好ましい。従って、マグネット16とロータコア15、ステータコア5の各寸法関係は、次のように設定することが好ましい。
マグネット長<ロータコア長[=マグネット長+(0を超え1mm以下)×2]
ロータコア長<ステータコア長[=ロータコア長+(0を超え1mm以下)×2]
上記のような寸法関係にてダブルオーバーハング構造を構成すると、両オーバーハング部41,42の作用により、ロータコア15・ステータコア5の両端部にて、軸方向からの磁束の流れ込みが抑えられる。そして、マグネット16からロータコア15、ロータコア15からステータコア5にそれぞれ流入する磁束が軸方向に沿って均等化される。その結果、軸方向の磁束密度が均一化し、磁束密度の偏りに起因するコギングの低減が図られる。
マグネット長<ロータコア長[=マグネット長+(0を超え1mm以下)×2]
ロータコア長<ステータコア長[=ロータコア長+(0を超え1mm以下)×2]
上記のような寸法関係にてダブルオーバーハング構造を構成すると、両オーバーハング部41,42の作用により、ロータコア15・ステータコア5の両端部にて、軸方向からの磁束の流れ込みが抑えられる。そして、マグネット16からロータコア15、ロータコア15からステータコア5にそれぞれ流入する磁束が軸方向に沿って均等化される。その結果、軸方向の磁束密度が均一化し、磁束密度の偏りに起因するコギングの低減が図られる。
発明者らの実験によれば、オーバーハング量X1=0とし、X2のみを設定してもコギングは改善されたが、出力トルクが減少した。従って、トルクアップのためには、X1とX2を共に設定することが好ましい。また、X1のみを設定し、X2=0あるいはマイナス(ステータコア5の方がロータコア15より短い)に設定すると、コギングが却って増大した。
このように、本発明によるIPMモータでは、モータのサイズを大きく増やすことなく、ロータコア15とステータコア5の軸方向寸法を変えるだけでコギングトルクを低減できる。その結果、D/L>1のような扁平型IPMモータにおいても、容易かつ効果的にコギングを低減できる。また、オーバーハング部41,42の設定も、ステータコアプレート17やロータコアプレート18の板厚や積層枚数の変更により容易に調整可能である。従って、従来の構成を大幅に変更することなく、容易にモータ特性を改善することが可能となる。
本発明は前記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることは言うまでもない。
例えば、前述の実施の形態では、IPMモータとして、図2のような形態のものに本発明を適用した例を示したが、本発明は、マグネット埋め込み式のモータ全てに適用可能である。例えば、図6(a)~(c)に示したような構成のIPMモータにも適用可能である。また、前述の実施形態では、ステータコアプレート17とロータコアプレート18の板厚が共に0.5mmの例を示したが、両プレートの板厚は0.5mmには限定されない。また、ステータコアプレート17とロータコアプレート18の板厚が共に同じ板厚でなくとも良い。オーバーハング量X1,X2は、ロータコアプレート18の板厚を基準として、その1~2枚程度が好ましい。
例えば、前述の実施の形態では、IPMモータとして、図2のような形態のものに本発明を適用した例を示したが、本発明は、マグネット埋め込み式のモータ全てに適用可能である。例えば、図6(a)~(c)に示したような構成のIPMモータにも適用可能である。また、前述の実施形態では、ステータコアプレート17とロータコアプレート18の板厚が共に0.5mmの例を示したが、両プレートの板厚は0.5mmには限定されない。また、ステータコアプレート17とロータコアプレート18の板厚が共に同じ板厚でなくとも良い。オーバーハング量X1,X2は、ロータコアプレート18の板厚を基準として、その1~2枚程度が好ましい。
前述の実施の形態では、マグネット16とロータコア15の間に設けられるオーバーハング部41のオーバーハング量X1の好ましい設定例として、
マグネット長<ロータコア長[=マグネット長+(0を超え1mm以下)×2]
とする例を示した。しかしながら、マグネット16は予め成形された成形品であることから、マグネット16の成形段階で、ロータコア15との軸方向長さを設定するようにしても良い。その場合、
マグネット長[=ロータコア長-0を超え1mm以下)×2]<ロータコア長
のようなダブルオーバーハング構造の寸法関係となる。
マグネット長<ロータコア長[=マグネット長+(0を超え1mm以下)×2]
とする例を示した。しかしながら、マグネット16は予め成形された成形品であることから、マグネット16の成形段階で、ロータコア15との軸方向長さを設定するようにしても良い。その場合、
マグネット長[=ロータコア長-0を超え1mm以下)×2]<ロータコア長
のようなダブルオーバーハング構造の寸法関係となる。
本発明は、電動パワーステアリング装置の駆動源以外にも、他の車載電動装置や、ハイブリッド自動車、電気自動車、エアコン等の電気製品等に広く適用可能である。
1 ブラシレスモータ 2 ステータ
3 ロータ 4 モータケース
5 ステータコア 6 ステータコイル
6a 端部 7 バスバーユニット
8 ブラケット 9 ティース部
10 スロット 11 インシュレータ
12 接続端子 13 ロータシャフト
14a,14b ベアリング 15 ロータコア
15a コア本体 16 マグネット
17 ステータコアプレート 18 ロータコアプレート
21 レゾルバ 22 レゾルバロータ
23 レゾルバステータ 24a レゾルバホルダ
24b レゾルバブラケット 25 取付ネジ
31 マグネット取付孔(マグネット取付部)
32 突極部 33 空隙部
34 ブリッジ部 41 第1オーバーハング部
42 第2オーバーハング部 51 IPMモータ
52 ステータ 53 ロータ
54 ステータコア 55 コイル
56 シャフト 57 ロータコア
57a ロータコア外周部 58 マグネット
Lm マグネット軸方向長 Lr ロータコア軸方向長
Ls ステータコア軸方向長
X1 マグネットに対するロータコアのオーバーハング量
X2 ロータコアに対するステータコアのオーバーハング量
tr ロータコアプレート板厚
ts ステータコアプレート板厚
3 ロータ 4 モータケース
5 ステータコア 6 ステータコイル
6a 端部 7 バスバーユニット
8 ブラケット 9 ティース部
10 スロット 11 インシュレータ
12 接続端子 13 ロータシャフト
14a,14b ベアリング 15 ロータコア
15a コア本体 16 マグネット
17 ステータコアプレート 18 ロータコアプレート
21 レゾルバ 22 レゾルバロータ
23 レゾルバステータ 24a レゾルバホルダ
24b レゾルバブラケット 25 取付ネジ
31 マグネット取付孔(マグネット取付部)
32 突極部 33 空隙部
34 ブリッジ部 41 第1オーバーハング部
42 第2オーバーハング部 51 IPMモータ
52 ステータ 53 ロータ
54 ステータコア 55 コイル
56 シャフト 57 ロータコア
57a ロータコア外周部 58 マグネット
Lm マグネット軸方向長 Lr ロータコア軸方向長
Ls ステータコア軸方向長
X1 マグネットに対するロータコアのオーバーハング量
X2 ロータコアに対するステータコアのオーバーハング量
tr ロータコアプレート板厚
ts ステータコアプレート板厚
Claims (8)
- 磁性材料にて形成されたステータコアを備えるステータと、
前記ステータの内側に回転自在に配置され、磁性材料にて形成されたロータコアと、前記ロータコア内に固定された複数個のマグネットとを備えるロータと、を有してなるブラシレスモータであって、
前記ロータコアは、ロータシャフトに固定されるコア本体と、該コア本体の周方向に沿って等間隔に設けられ前記マグネットが収容される複数個のマグネット取付部と、を有し、
前記ロータコアの軸方向長Lrは、前記マグネットの軸方向長Lmよりも長く(Lr>Lm)、かつ、前記ステータコアの軸方向長Lsは、前記ロータコアの軸方向長Lrよりも長い(Ls>Lr)ことを特徴とするブラシレスモータ。 - 請求項1記載のブラシレスモータにおいて、
前記ロータコアの両端部に、前記マグネットと対向することなく前記マグネットの軸方向端部から軸方向に沿って張り出した第1オーバーハング部を設けると共に、
前記ステータコアの両端部に、前記ロータコアと対向することなく前記ロータコアの軸方向端部から軸方向に沿って張り出した第2オーバーハング部を設けたことを特徴とするブラシレスモータ。 - 請求項1または2記載のブラシレスモータにおいて、
前記第1及び第2オーバーハング部の軸方向の長さX1,X2が0を超え~1.0mm以下であることを特徴とするブラシレスモータ。 - 請求項3記載のブラシレスモータにおいて、前記第1及び第2オーバーハング部の軸方向の長さX1,X2が等しい(X1=X2)ことを特徴とするブラシレスモータ。
- 請求項1~4の何れか1項に記載のブラシレスモータにおいて、
前記ロータコアは、薄板鋼板からなるロータコアプレートを複数枚積層して構成され、
前記ロータコアの軸方向長Lrは、前記マグネットの軸方向長Lmよりも、前記ロータコアプレートの板厚tr×n(nは自然数)だけ長い(Lr=Lm+tr×n)ことを特徴とするブラシレスモータ。 - 請求項5記載のブラシレスモータにおいて、
前記ステータコアは、薄板鋼板からなるステータコアプレートを複数枚積層して構成され、
前記ステータコアの軸方向長Lsは、前記ロータコアの軸方向長Lrよりも、前記ステータコアプレートの板厚ts×n(nは自然数)だけ長い(Ls=Lr+ts×n)ことを特徴とするブラシレスモータ。 - 請求項6記載のブラシレスモータにおいて、
前記ロータコアプレートの板厚trと前記ステータコアプレートの板厚tsが等しい(tr=ts)ことを特徴とするブラシレスモータ。 - 請求項1~7の何れか1項に記載のブラシレスモータにおいて、
前記ロータコアは、前記マグネット取付部の外周側に形成され、前記ロータの外周部に配される複数の突極部を有することを特徴とするブラシレスモータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14833881.7A EP3032717A4 (en) | 2013-08-05 | 2014-08-01 | Brushless motor |
| CN201480042566.9A CN105684279B (zh) | 2013-08-05 | 2014-08-01 | 无刷电机 |
| US14/909,612 US20160197541A1 (en) | 2013-08-05 | 2014-08-01 | Brushless motor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013161967A JP6257212B2 (ja) | 2013-08-05 | 2013-08-05 | ブラシレスモータ |
| JP2013-161967 | 2013-08-05 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015019948A1 true WO2015019948A1 (ja) | 2015-02-12 |
Family
ID=52461284
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/070311 WO2015019948A1 (ja) | 2013-08-05 | 2014-08-01 | ブラシレスモータ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20160197541A1 (ja) |
| EP (1) | EP3032717A4 (ja) |
| JP (1) | JP6257212B2 (ja) |
| CN (1) | CN105684279B (ja) |
| WO (1) | WO2015019948A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016199226A1 (ja) * | 2015-06-09 | 2016-12-15 | 三菱電機株式会社 | 圧縮機用電動機、圧縮機、および冷凍サイクル装置 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104514987B (zh) * | 2014-12-19 | 2017-02-22 | 清华大学 | 管道三维漏磁成像缺陷量化方法 |
| CN105071568B (zh) * | 2015-08-18 | 2018-05-18 | 广东美芝制冷设备有限公司 | 电机和具有其的压缩机 |
| JP6436065B2 (ja) * | 2015-11-18 | 2018-12-12 | トヨタ自動車株式会社 | 回転電機 |
| JP6616232B2 (ja) * | 2016-04-25 | 2019-12-04 | ファナック株式会社 | 固定子鉄心を有する回転電機、及びそれを備える工作機械 |
| GB2553362A (en) * | 2016-09-05 | 2018-03-07 | Edwards Ltd | Vacuum pump assembly |
| CN109546832B (zh) * | 2017-09-21 | 2021-08-10 | 德昌电机(深圳)有限公司 | 无刷直流电机及其双离合变速器 |
| US10385951B2 (en) | 2017-10-04 | 2019-08-20 | Schaeffler Technologies AG & Co. KG | Electric axle assembly |
| US10734876B2 (en) | 2018-03-19 | 2020-08-04 | Denso International America, Inc. | Brushless motor for HVAC system |
| CN208589826U (zh) * | 2018-06-11 | 2019-03-08 | 宝龙电子集团有限公司 | 一种驱动马达 |
| CN109861426B (zh) * | 2019-03-18 | 2021-07-27 | 东南大学 | 一种转子磁场正弦化永磁磁阻同步电机转子结构 |
| JP2021061677A (ja) * | 2019-10-07 | 2021-04-15 | 三菱電機株式会社 | 回転電機 |
| JP7459155B2 (ja) | 2022-03-07 | 2024-04-01 | 三菱電機株式会社 | 回転電機及びその界磁子製造方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11234931A (ja) * | 1998-02-19 | 1999-08-27 | Hitachi Ltd | 永久磁石式回転電機 |
| JP2004194489A (ja) * | 2002-12-13 | 2004-07-08 | Mitsuba Corp | ブラシレスモータ |
| JP2008160931A (ja) | 2006-12-21 | 2008-07-10 | Brother Ind Ltd | モータ |
| JP2010045873A (ja) * | 2008-08-08 | 2010-02-25 | Fuji Electric Systems Co Ltd | 高効率永久磁石式電動機 |
| JP2010051150A (ja) | 2008-08-25 | 2010-03-04 | Mitsuba Corp | ブラシレスモータ |
| JP2012120326A (ja) * | 2010-11-30 | 2012-06-21 | Fujitsu General Ltd | 磁石埋め込み型回転子、電動機及び電動機の組立方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1210860C (zh) * | 1999-07-16 | 2005-07-13 | 松下电器产业株式会社 | 永久磁铁同步电动机 |
| JP4495443B2 (ja) * | 2003-11-05 | 2010-07-07 | 山洋電気株式会社 | 同期モータとその回転制御方法、及び、同期モータ用インバータ |
| KR100624730B1 (ko) * | 2005-04-04 | 2006-09-20 | 엘지전자 주식회사 | 모터 |
| KR101225164B1 (ko) * | 2005-12-30 | 2013-01-22 | 삼성전자주식회사 | 브러쉬리스 직류 모터 |
| US7741750B1 (en) * | 2008-12-29 | 2010-06-22 | Tesla Motors, Inc. | Induction motor with improved torque density |
| JP5363520B2 (ja) * | 2011-03-04 | 2013-12-11 | 株式会社日立産機システム | 永久磁石同期機 |
-
2013
- 2013-08-05 JP JP2013161967A patent/JP6257212B2/ja active Active
-
2014
- 2014-08-01 CN CN201480042566.9A patent/CN105684279B/zh not_active Expired - Fee Related
- 2014-08-01 WO PCT/JP2014/070311 patent/WO2015019948A1/ja active Application Filing
- 2014-08-01 US US14/909,612 patent/US20160197541A1/en not_active Abandoned
- 2014-08-01 EP EP14833881.7A patent/EP3032717A4/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11234931A (ja) * | 1998-02-19 | 1999-08-27 | Hitachi Ltd | 永久磁石式回転電機 |
| JP2004194489A (ja) * | 2002-12-13 | 2004-07-08 | Mitsuba Corp | ブラシレスモータ |
| JP2008160931A (ja) | 2006-12-21 | 2008-07-10 | Brother Ind Ltd | モータ |
| JP2010045873A (ja) * | 2008-08-08 | 2010-02-25 | Fuji Electric Systems Co Ltd | 高効率永久磁石式電動機 |
| JP2010051150A (ja) | 2008-08-25 | 2010-03-04 | Mitsuba Corp | ブラシレスモータ |
| JP2012120326A (ja) * | 2010-11-30 | 2012-06-21 | Fujitsu General Ltd | 磁石埋め込み型回転子、電動機及び電動機の組立方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3032717A4 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016199226A1 (ja) * | 2015-06-09 | 2016-12-15 | 三菱電機株式会社 | 圧縮機用電動機、圧縮機、および冷凍サイクル装置 |
| JPWO2016199226A1 (ja) * | 2015-06-09 | 2017-09-07 | 三菱電機株式会社 | 圧縮機用電動機、圧縮機、および冷凍サイクル装置 |
| CN107534370A (zh) * | 2015-06-09 | 2018-01-02 | 三菱电机株式会社 | 压缩机用电动机、压缩机及制冷循环装置 |
| EP3309939A4 (en) * | 2015-06-09 | 2019-01-16 | Mitsubishi Electric Corporation | COMPRESSOR ELECTRIC MOTOR, COMPRESSOR AND COLD CIRCULATOR |
| CN111342632A (zh) * | 2015-06-09 | 2020-06-26 | 三菱电机株式会社 | 压缩机用电动机、压缩机及制冷循环装置 |
| US10900696B2 (en) | 2015-06-09 | 2021-01-26 | Mitsubishi Electric Corporation | Electric motor for compressor, compressor, and refrigeration cycle device |
| CN111342632B (zh) * | 2015-06-09 | 2022-05-10 | 三菱电机株式会社 | 压缩机用电动机、压缩机及制冷循环装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015033244A (ja) | 2015-02-16 |
| US20160197541A1 (en) | 2016-07-07 |
| CN105684279B (zh) | 2019-02-22 |
| CN105684279A (zh) | 2016-06-15 |
| JP6257212B2 (ja) | 2018-01-10 |
| EP3032717A1 (en) | 2016-06-15 |
| EP3032717A4 (en) | 2017-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6257212B2 (ja) | ブラシレスモータ | |
| US9490673B2 (en) | Rotor of magnet-assisted reluctance motor and brushless motor | |
| JP6388705B2 (ja) | 回転電機の回転子、及びモータ | |
| JP5480106B2 (ja) | 回転電機 | |
| JP5959747B2 (ja) | 固定子鉄心、固定子、回転電機、電動パワーステアリング装置、固定子の製造方法、回転電機の製造方法、電動パワーステアリング装置の製造方法 | |
| JP6226867B2 (ja) | ブラシレスモータ及びブラシレスモータ用ロータ | |
| JP6234558B2 (ja) | 永久磁石型モータ | |
| JP2016063728A (ja) | ブラシレスモータ | |
| JP2009171790A (ja) | 永久磁石形同期モータ | |
| WO2015151344A1 (ja) | 永久磁石式ブラシレスモータ | |
| WO2014102950A1 (ja) | 回転電機 | |
| WO2016035533A1 (ja) | 回転電機のステータ、及びこれを備えた回転電機 | |
| JP2014239633A (ja) | モータ用ロータコア及びブラシレスモータ | |
| JPWO2018037529A1 (ja) | 回転電機 | |
| CN102790458A (zh) | 永磁辅助同步磁阻电机转子及其制造方法和电机 | |
| JP2013126291A (ja) | ブラシレスモータおよび電動パワーステアリング装置 | |
| JP2014007939A (ja) | ブラシレスモータ | |
| JP2014107939A (ja) | ブラシレスモータ | |
| JP2013207946A (ja) | 回転電機 | |
| JP2011188685A (ja) | 永久磁石型電動機 | |
| JP2014093914A (ja) | ブラシレスモータ | |
| JP6695241B2 (ja) | ブラシレスモータ | |
| JP2014082935A (ja) | 回転電機の固定子、およびこれを備えた回転電機 | |
| WO2007123058A1 (ja) | モータ | |
| JP2014054060A (ja) | ブラシレスモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14833881 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14909612 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014833881 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |