WO2012147572A1 - 作業車両の制御装置およびその制御方法 - Google Patents
作業車両の制御装置およびその制御方法 Download PDFInfo
- Publication number
- WO2012147572A1 WO2012147572A1 PCT/JP2012/060381 JP2012060381W WO2012147572A1 WO 2012147572 A1 WO2012147572 A1 WO 2012147572A1 JP 2012060381 W JP2012060381 W JP 2012060381W WO 2012147572 A1 WO2012147572 A1 WO 2012147572A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- clutch
- pump
- work vehicle
- control
- hst
- Prior art date
Links
Images









Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2079—Control of mechanical transmission
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2253—Controlling the travelling speed of vehicles, e.g. adjusting travelling speed according to implement loads, control of hydrostatic transmission
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2289—Closed circuit
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2296—Systems with a variable displacement pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/4035—Control of circuit flow
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/42—Control of exclusively fluid gearing hydrostatic involving adjustment of a pump or motor with adjustable output or capacity
- F16H61/431—Pump capacity control by electro-hydraulic control means, e.g. using solenoid valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/44—Control of exclusively fluid gearing hydrostatic with more than one pump or motor in operation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/44—Control of exclusively fluid gearing hydrostatic with more than one pump or motor in operation
- F16H61/444—Control of exclusively fluid gearing hydrostatic with more than one pump or motor in operation by changing the number of pump or motor units in operation
Definitions
- a hydraulic pump driven by an engine and two hydraulic motors driven by hydraulic oil discharged from the hydraulic pump are connected by a closed hydraulic circuit, and the two hydraulic motors are connected in parallel to the hydraulic pump.
- the clutch is released or engaged so that power is transmitted from one hydraulic motor to the output shaft via the clutch, and the vehicle is driven by the driving force (hereinafter, power) of the one or two hydraulic motors.
- the present invention relates to a control device for a working vehicle and a control method thereof.
- a work vehicle equipped with an HST has a configuration in which a hydraulic pump and a hydraulic motor are communicated with each other through a closed hydraulic circuit and travels with the power of the hydraulic motor.
- an engine, a hydraulic pump, and a hydraulic motor can be driven with an optimal output, pump capacity, and motor capacity by electronic control technology to improve work efficiency and save fuel.
- HST As a work vehicle equipped with this HST, for example, two hydraulic motors are connected in parallel to a hydraulic pump, and only one hydraulic motor is connected to a clutch, and power is transmitted to four wheels via a power transmission mechanism such as an axle.
- a power transmission mechanism such as an axle.
- Such an HST is a so-called 1-pump 2-motor type HST.
- This one-pump two-motor type HST may be employed when a large hydraulic motor cannot be manufactured or when there is no place on the work vehicle where the large hydraulic motor is installed.
- this one-pump two-motor type HST is adopted.
- This 1-pump 2-motor type HST is driven by two hydraulic motors when the work vehicle is traveling at a low speed, and when the work vehicle reaches a high-speed travel range, the clutch connected to one hydraulic motor is released, and the other 1 The work vehicle is driven by the power of only one hydraulic motor.
- the HST pump (travel hydraulic pump) is, for example, a swash plate type variable displacement piston pump, and the discharge amount of hydraulic oil discharged from the HST pump can be changed by changing the tilt angle of the swash plate.
- the running hydraulic pump or the working hydraulic pump is matched to perform work and running in a low engine output range. Yes. Accordingly, the pump absorption torque of the HST pump (travel hydraulic pump) increases. Therefore, the swash plate angle of the HST pump is increased in order to obtain the discharge amount of hydraulic fluid of the HST pump equivalent to that of the conventional work vehicle even in the low rotation region.
- the 1-pump 2-motor type HST does not use a large hydraulic pump, so it is small and has good response.
- the clutch can be engaged or released.
- the clutch is released when shifting from low speed to high speed, but since the HST motor itself is also small, the transmission gear ratio before and after the clutch is released is larger than before, and suddenly after the clutch is released. It is conceivable that there will be a problem in operation feeling that a feeling of acceleration appears.
- the present invention has been made in view of the above, and suppresses sudden fluctuations in hydraulic pressure such as generation of surge pressure of hydraulic pressure when the work vehicle travels while maintaining low fuel consumption, and the clutch is disengaged.
- Control device for work vehicle that can suppress impact at the time of clutch engagement and clutch, prevent damage to clutch, hydraulic circuit and hydraulic equipment, and give operator a good feeling of operation by smooth clutch operation and control thereof It aims to provide a method.
- a control device for a work vehicle includes a hydraulic pump driven by an engine and two hydraulic motors in a closed circuit, with respect to the hydraulic pump.
- the two hydraulic motors have a hydraulic circuit connected in parallel, and the clutch is released or engaged so that power is transmitted to the output shaft of one hydraulic motor via the clutch.
- load detection means for obtaining a work vehicle load of the work vehicle from a throttle output amount and an engine speed of the engine, and at the time of clutch release transition control .
- the hydraulic pump position is limited under the upper limit discharge amount of the hydraulic pump determined in advance.
- the hydraulic pressure is controlled under the restriction of the lower limit discharge amount of the hydraulic pump obtained in advance based on the work vehicle load obtained by the load detecting means during the clutch engagement transition control.
- Control means for performing control to increase the pump discharge amount of the pump is provided.
- the work vehicle control device is characterized in that the work vehicle load is obtained based on an engine speed and an accelerator opening or an intake manifold pressure.
- the control means has a clutch status indicating a clutch state including a clutch open state, a released state, an engaged state, and an engaged state.
- the clutch release transition control and the engagement transition control are determined based on the above.
- the clutch status of the output shaft obtained based on a vehicle status indicating a transition of a traveling state of the work vehicle and an accelerator opening degree. It changes based on the number of rotations.
- the work vehicle control method is a hydraulic circuit in which a hydraulic pump driven by an engine and two hydraulic motors are in a closed circuit, and the two hydraulic motors are connected in parallel to the hydraulic pump.
- the clutch is released or engaged so that power is transmitted to the output shaft of one hydraulic motor via the clutch, and the vehicle travels by the power of the one or two hydraulic motors.
- the work vehicle load of the work vehicle is obtained from the throttle output amount and the engine speed of the engine, and is obtained in advance based on the obtained work vehicle load during the clutch release transition control.
- the work vehicle control method according to the present invention is characterized in that, in the above invention, the work vehicle load is obtained based on an engine speed and an accelerator opening or an intake manifold pressure.
- the discharge amount of the hydraulic pump is reduced under the limit of the upper limit discharge amount of the hydraulic pump determined in advance based on the work vehicle load. And control to increase the discharge amount of the hydraulic pump under the restriction of the lower limit discharge amount of the hydraulic pump obtained in advance based on the work vehicle load at the time of clutch engagement transition control. Therefore, the work vehicle maintains a low fuel consumption, and suppresses shocks caused by damage to the clutch, hydraulic circuit or hydraulic equipment when the clutch is disengaged or when the clutch is engaged, and shocks caused by sudden pressure fluctuations in the hydraulic pressure. By performing the operation, it is possible to give the operator a good operational feeling as well as a good clutch response.
- FIG. 1 is a diagram showing an overall configuration of a wheel loader according to an embodiment of the present invention.
- FIG. 2 is a diagram showing a circuit configuration centering on the drive system of the wheel loader according to the embodiment of the present invention.
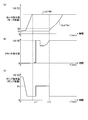
- FIG. 3 is a time chart showing a control process at the time of clutch release transition.
- FIG. 4 is a time chart showing a control process at the time of clutch engagement transition.
- FIG. 5 is an explanatory diagram for explaining the clutch status.
- FIG. 6 is a flowchart showing a clutch control procedure and a pump discharge amount control procedure based on the clutch status by the HST controller.
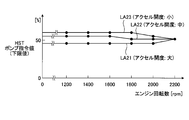
- FIG. 7 is a graph showing the upper limit value of the HST pump command value corresponding to the vehicle load at the time of clutch release transition.
- FIG. 8 is a graph showing the lower limit value of the HST pump command value according to the vehicle load at the time of clutch engagement transition.
- FIG. 9 is a diagram illustrating a transition condition of the clutch status.
- FIG. 10 is a diagram illustrating a transition condition between the vehicle status and the vehicle status.
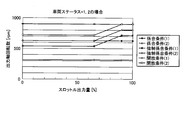
- FIG. 11 is a graph showing the vehicle status transition condition when the vehicle status is “1” or “2”.
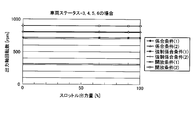
- FIG. 12 is a graph showing vehicle status transition conditions when the vehicle status is “3” to “6”.
- FIG. 13 is an explanatory diagram for explaining the outline of control performed by the control device and the control method according to this embodiment.
- FIG. 1 is a diagram illustrating an overall configuration of a wheel loader 50 that is an example of a work vehicle.
- FIG. 2 is a diagram showing a circuit configuration centered on the drive system of the wheel loader 50.
- the wheel loader 50 includes a vehicle body 51, a lift arm 52 attached to the front portion of the vehicle body 51, a bucket 53 attached to the tip of the lift arm 52, a bell crank 56, and the like.
- the vehicle body 51 includes an engine room that houses the engine 1, working machine hydraulic cylinders 19 a and 19 b that operate the lift arm 52 and the bell crank 56, a control valve 18 that controls the working machine hydraulic cylinders 19 a and 19 b, A machine hydraulic cylinder 19a, 19b, a work machine hydraulic pump 2, an HST pump (travel hydraulic pump) 4, and a vehicle body controller 30 for controlling actuators such as travel hydraulic motors 10a, 10b.
- the engine 1, the vehicle body controller 30, the engine controller 32, and the like are mounted on the vehicle body 51.
- the lift arm 52 is a link member for lifting the bucket 53 attached to the tip, and moves up and down as the working machine hydraulic cylinder (lift cylinder) 19a connected to the lift arm 52 expands and contracts.
- the bucket 53 is attached to the tip of the lift arm 52, and further, the working machine hydraulic cylinder (bucket cylinder) 19b connected via a link member called a bell crank 56 is extended and retracted to be dumped and tilted. .
- the wheel loader 50 drives HST motors (travel hydraulic motors) 10a and 10b with hydraulic oil discharged from an HST pump (travel hydraulic pump) 4 driven by the engine 1.
- An HST circuit 20 for running the wheel loader 50 is included.
- the HST circuit 20 is a one-pump two-motor HST system in which two HST motors 10a and 10b are connected in parallel to the HST pump 4 to form a closed hydraulic circuit. Further, the HST circuit 20 drives the two HST motors 10a and 10b to transmit power to the output shaft 15 to travel the wheel loader 50 during low speed traveling, and disengages the clutch 13 during high speed traveling. The transmission of power from the HST motor 10a to the output shaft 15 is disconnected, and only the HST motor 10b is driven to run the wheel loader 50.
- the wheel loader 50 includes a work implement side mechanism including a work implement hydraulic pump 2 driven by the engine 1, a travel side mechanism including an HST pump 4 driven by the engine 1, and the work implement side mechanism and the travel side mechanism.
- a hydraulic drive mechanism including an engine controller 32, a vehicle body controller 30, and the like.
- the hydraulic drive mechanism includes an engine 1, a working machine hydraulic pump 2, a charge pump 3, an HST pump 4, HST motors 10a and 10b, a clutch 13, an engine controller 32, a vehicle body controller 30, an accelerator opening sensor 33, and a forward / reverse switching lever. 34, a vehicle speed sensor 36, an HST pressure sensor 37, and an HST circuit 20.
- the forward / reverse switching lever 34 is provided near the steering column in the cab 55 (cab), and can be switched between forward (F), reverse (R), and neutral (N) when operated by the operator. Thus, the position of the switched lever is electrically detected.
- a speed stage switch capable of setting the vehicle speed range of the wheel loader 50 is provided near the steering column.
- the speed stage switch may be an independent dial switch or button switch, or may be attached to the forward / reverse switching lever 34. When the speed stage switch is operated by the operator, the set speed stage position is electrically detected.
- the engine 1 is a diesel engine, and the output torque generated by the engine 1 is transmitted to the working machine hydraulic pump 2, the charge pump 3, the HST pump 4, and the like.
- the engine 1 is connected to an engine controller 32 that controls the output torque and the rotational speed of the engine 1.
- the engine controller 32 adjusts the fuel injection amount according to the accelerator opening that is the operation amount of the accelerator pedal 33a.
- the engine 1 also includes an engine speed sensor 1 a that detects the actual speed of the engine 1, and inputs a speed signal of the engine speed sensor 1 a to the engine controller 32.
- the engine 1 is connected to a fuel injection device 1b.
- the engine controller 32 adjusts the engine torque and the engine speed by controlling the fuel injection amount 1b according to the accelerator opening.
- a common rail fuel injection system including a fuel pump, a common rail, an injector, and the like is used.
- the accelerator pedal 33a is provided below the operation seat in the cab 55, and an operator of the wheel loader 50 performs a stepping operation to adjust the amount of depression.
- the accelerator pedal 33a is provided with an accelerator opening sensor 33 for detecting the depression amount (throttle output amount) of the accelerator pedal 33a.
- the accelerator opening sensor 33 is realized by a potentiometer or the like, and outputs the detected accelerator opening to the engine controller 32.
- the engine controller 32 controls the fuel injection device 1b according to the input accelerator opening, and adjusts the fuel injection amount to the engine 1.
- the throttle output amount to the engine 1 may be determined by an operating means such as an operating lever or dial that can be manually operated by the operator.
- the HST pump 4 is a variable displacement hydraulic pump (for example, a swash plate variable displacement piston pump) driven by the engine 1.
- the hydraulic fluid discharged from the HST pump 4 is sent to the HST motors 10a and 10b via the HST circuit 20 including the high pressure relief valves 7 and 8 and the low pressure relief valve 9, respectively.
- the pressure of hydraulic oil in the HST circuit 20 hydraulic piping (hereinafter referred to as HST pressure) is detected by an HST pressure sensor 37 provided in the HST circuit 20, and a signal indicating the detected pressure is generated in the vehicle body controller 30. To the HST controller 31.
- the HST pump 4 includes a pump control valve 5 that controls the swash plate angle and hydraulic fluid flow direction for controlling the capacity of the HST pump 4, and a pump that drives the swash plate according to a control instruction of the pump control valve 5.
- a displacement control cylinder 6 is connected.
- the HST motors 10a and 10b are variable displacement hydraulic motors. Each HST motor 10a, 10b is driven by the hydraulic oil discharged from the HST pump 4, and outputs power for running the wheel loader 50.
- the HST motors 10a and 10b have motor cylinders 12a and 12b for controlling swash plate angles, and motor control electronic servo valves 11a and 11b for controlling the motor cylinders 12a and 12b, respectively.
- the motor control electronic servo valves 11a and 11b are electromagnetic control valves that operate according to a control signal transmitted from the HST controller 31 in the vehicle body controller 30, and control the motor cylinders 12a and 12b, respectively. In this way, the motor capacities of the HST motors 10a and 10b can be arbitrarily changed.
- the clutch 13 is controlled to release or engage the clutch by driving the clutch control valve 14 in accordance with a control signal transmitted from the HST controller 31.
- the HST motor 10a transmits power to the output shaft 15 or disconnects transmission.
- the HST motor 10 b always transmits power to the output shaft 15.
- the vehicle speed sensor 36 is a sensor that detects the rotation speed of the output shaft 15, that is, the vehicle speed of the wheel loader 50.
- the vehicle speed sensor 36 may detect the vehicle speed from the number of rotations of the tire 54 by appropriately determining the installation location.
- the charge pump 3 is driven by the engine 1 and is a pump for supplying hydraulic oil to the HST circuit 20.
- the charge pump 3 supplies hydraulic oil to the pilot circuit of the HST pump 4.
- the engine controller 32 and the vehicle body controller 30 are connected to each other, and can exchange information such as data and signals with each other.
- FIG. 3A shows changes in motor command values instructed to the HST motors 10a and 10b with respect to time (vehicle speed), a characteristic line La shows a motor command value for the HST motor 10a, and a characteristic line Lb shows the HST motor. The motor command value for 10b is shown.
- FIG. 3B shows a change in the clutch command value for instructing the release and engagement states of the clutch 13 with respect to time (vehicle speed).
- the clutch command value of 0% means that the clutch 13 is released
- the clutch command value of 100% means that the clutch 13 is completely engaged.
- FIG. 3C shows a change in the pump command value instructed to the HST pump 4 with respect to time (vehicle speed).
- the vehicle speed of the wheel loader 50 shifts from low speed travel to high speed travel.
- the swash plate angle is tilted to 100% (the pump capacity is maximized)), and a large torque is output together with a large pump discharge amount.
- a 100% pump command value is smaller than an upper limit value Pd described later.
- the pump command value Pd is smaller than the previous pump command value (FIG. 3C), and the pump discharge amount of the HST pumps 10a and 10b is suppressed.
- the motor command value (motor capacity determined by the inclination angle of the swash plate angle) of the HST motor 10a is gradually decreased as the vehicle speed increases as shown in FIG.
- the clutch command value is such that the clutch command value of 100% gradually decreases (modulates) from the time t2 when the motor capacity becomes 27%, and the clutch 13 is completely at the time t3 when the clutch command value reaches 30%.
- the clutch command value is set to 0% at once (FIG. 3B).
- the clutch 13 is disengaged, and from this time point t3, the pump command value is increased to 100% without being limited by the upper limit value Pd (FIG. 3 (c)).
- the pump command value is suppressed to reduce the pump capacity and the power transmission to the output shaft 15 is cut off during the period from the time t1 to the time t3 when the clutch 13 shifts from the engaged state to the released state.
- Reduces the pump discharge amount for the pump capacity that does not need to be supplied to the HST motor 10a suppresses the generation of hydraulic surge pressure in the hydraulic circuit, suppresses impact, and realizes smooth clutch operation with good responsiveness is doing. Therefore, friction of the clutch 13 due to a large torque at the time of clutch release transition can be suppressed, and damage to hydraulic equipment and hydraulic piping can be prevented.
- the smooth clutch operation suppresses rapid acceleration when the clutch is released, it gives a good operational feeling to the operator.
- the pump command value for suppressing the pump discharge amount of the HST pump 4 when the clutch is disengaged is obtained in advance as an upper limit value Pd corresponding to the load of the work vehicle, and does not exceed the upper limit value Pd. .
- the pump command value does not exceed the upper limit value Pd
- the pump discharge amount supplied to the HST motor 10a before clutch release (before time t3) is suppressed, and the motor capacity of the HST motor 10a is reduced.
- the reduction in the motor capacity of the HST motor 10a means that the amount of hydraulic oil discharged from the HST pump 4 does not require that much hydraulic oil to be discharged.
- the load of the work vehicle determines the degree of load based on the relationship between the engine speed and the accelerator opening.
- a predetermined upper limit value Pd of the pump command value corresponding to the degree of load is stored in the memory of the HST controller 31. For example, if the degree of load is obtained from the engine speed and the accelerator opening at a certain point in time and the upper limit value Pd corresponding to the degree of load is 70%, the pump command value does not exceed 70%. .
- FIG. 4A shows changes in motor command values instructed to the HST motors 10a and 10b with respect to time (vehicle speed), a characteristic line LLa shows a motor command value for the HST motor 10a, and a characteristic line LLb shows the HST motor.
- the motor command value for 10b is shown.
- FIG. 4B shows a change in the clutch command value (target value) for instructing the state of clutch release and engagement with respect to time (vehicle speed).
- FIG. 4C shows a change in the pump command value instructed to the HST pump 4 with respect to time (vehicle speed).
- the clutch command value is changed from near 0% to 100% from the time point t11 when the clutch 13 starts to shift from the released state to the engaged state until the time point t12 when the engaged state is completed, and the clutch 13 is engaged.
- This clutch command value is a target value, and a clutch command value obtained by increasing the clutch command value (for example, 100%) is output for a short time from the time point t11. After a short time, the clutch command value is decreased, The clutch command value is increased to 100% as time t12 elapses. Therefore, the actual degree of engagement of the clutch 13 responds with a slight delay to the clutch command value, and the clutch 13 gradually shifts from disengagement to engagement.
- the pump command value is set to a pump command value that is larger than the previously obtained lower limit value Pu and increased from the immediately preceding pump command value (FIG. 4 (c)).
- the pump command value is a value immediately before time t11 after time t12. Further, after time t12, the clutch 13 is engaged and the motor command value (motor capacity) of the HST motor 10a increases as shown by the characteristic line LLa (FIG. 4A).
- the pump command value is increased to increase the pump capacity (pump discharge amount) of the HST pump 4 during the period from the time t11 to t12 when the clutch 13 shifts from the disengaged state to the engaged state.
- the clutch 13 is engaged to transmit the power output from the HST motor 10a to the output shaft 15, but the hydraulic oil (pump capacity) that needs to be supplied to the HST motor 10a.
- the hydraulic pressure supplied from the HST pump 4 to the HST motor 10a is secured before the clutch command 13 is engaged by increasing the pump command value by time t12.
- the pump command value to be increased is obtained in advance as a lower limit value Pu corresponding to the load of the work vehicle, so that the lower limit value Pu is not lowered.
- the load of the work vehicle determines the degree of load based on the relationship between the engine speed and the accelerator opening.
- a predetermined value of the lower limit value Pu of the pump command value corresponding to the degree of load is stored in the memory of the HST controller 31. For example, when the degree of load is obtained from the engine speed and the accelerator opening at a certain point in time and the lower limit value Pu corresponding to the degree of load is 70%, the pump command value does not fall below 70%.
- the pump discharge amount is reduced within a range that does not exceed a predetermined upper limit value. Then, the pump discharge amount supplied to the HST motor 10a from which the transmission of power to the output shaft 15 is disconnected is suppressed before the clutch is released, and the occurrence of hydraulic surge pressure is suppressed and smooth clutch operation with high responsiveness is achieved. To suppress the impact. Further, when the clutch is engaged, the pump discharge force is increased within a range in which the pump discharge amount does not fall below a predetermined lower limit value. The hydraulic oil supplied to the HST motor 10a for transmitting the power to the output shaft 15 is secured before the clutch is engaged, and a smooth clutch operation is realized by suppressing a sudden change in hydraulic pressure, thereby suppressing the impact. Yes.
- the clutch status “completely engaged” is a status indicating that the clutch 13 is completely connected and the power of the HST motor 10a is transmitted to the output shaft 15, and the target clutch command value is 100%.
- Shift speed output shaft speed determined by referring to the first map or the second map
- output shaft speed is determined according to the shift time
- the speed of the output shaft 15 detected hereinafter referred to as output shaft speed.
- the clutch status “preparation for release” is a status indicating a state in which the motor capacity of the HST motor 10a is reduced to a certain value (for example, 27%) in preparation for the release of the clutch 13.
- a certain value for example, 27%
- the clutch status shifts to “released”.
- the clutch status is changed to “opening”.
- the clutch status “released” is a status indicating a state in which the clutch 13 is released, and the clutch command value is gradually decreased (modulated) from 100% to, for example, 30% to reduce the clutch 13 and release the clutch 13.
- the clutch command value reaches 30% the clutch status is shifted to “completed release”.
- the clutch command value 30% is merely an example numerical value, and this embodiment can be realized by setting another value in advance.
- the clutch status “open complete” is a status indicating a state in which the clutch command is set to 0% for failure detection (for detecting the clutch solenoid power of the clutch control valve 14).
- the clutch command value is set to 0% when the detected output shaft rotational speed is equal to or higher than a certain rotational speed and the vehicle speed stage is 3rd speed or 4th speed. Further, when the rotational speed is lower than the other rotational speed, the clutch command value is set to 30%, for example. In the state where the clutch status is “completely released”, the clutch status shifts under the following transition condition (details will be described later).
- the shift point (the output shaft rotational speed obtained by referring to the first map or the second map) is determined by the vehicle status, the throttle output amount (%), and the clutch status stay time,
- the clutch status is shifted to “engaged”. That is, this clutch status transition timing is the shift point Vc as shown in FIG.
- the clutch command value 30% is merely an example numerical value, and this embodiment can be realized by setting another value in advance.
- the clutch status “engaged” is a status indicating a state in which the clutch command value is changed in order to engage the clutch 13.
- the clutch status shifts under the following transition condition (details will be described later). That is, when the vehicle speed of the wheel loader 50 is increased, the detected output shaft rotational speed is equal to or higher than a certain rotational speed, and the vehicle speed stage is 3rd speed or 4th speed, the clutch status shifts to “open complete”. Further, as shown in FIG. 5, after the clutch status becomes “engaged”, a predetermined normal engagement end time R ⁇ b> 2 (see FIG. 5) elapses, and the clutch command value becomes 100%. In this case, the clutch status shifts to “engagement complete”.
- the clutch 13 performs an engagement operation called forced engagement.
- the clutch status shifts from “engaged” to a clutch status “forced engagement” described later.
- forced engagement the purpose of the engaging operation of the clutch 13 called forced engagement will be described.
- the clutch 13 receives a clutch command value as shown by a solid line in FIG.
- the wheel loader 50 is traveling at a predetermined speed or less (particularly at a speed that is traveling at a low speed), the wheel loader 50 is stopped by an impact when the clutch 13 is engaged. There is a possibility that the operator may feel uncomfortable.
- the clutch status “forcibly engaged” is a status indicating a state in which the clutch command value is increased to 100% at a predetermined rate from the target clutch command value when the clutch status is shifted to “forcibly engaged”. (See the broken line in FIG. 5). If the vehicle speed of the wheel loader 50 increases while the clutch status is “forcibly engaged” and the following transition conditions (details will be described later) are satisfied, the clutch status shifts to “completely released”. That is, when the output shaft rotational speed is equal to or higher than a certain rotational speed and the vehicle speed stage is the third speed or the fourth speed, the clutch status shifts to “completely opened”. Alternatively, when the following transition condition (details will be described later) is satisfied, the clutch status shifts to “engagement complete”.
- the clutch command value reaches 100% while the clutch status is “forced engagement”, the clutch status is shifted to “engagement complete”. That is, when the forced engagement time R2 ′ shown in FIG. 5 elapses and the clutch command value is increased to reach 100% as indicated by the broken line in FIG. 5, the clutch status is shifted to “engagement complete”. .
- a period including the release preparation “0” and the release “5” is defined as the release transition time R1 (see FIG. 5), and the clutch 13 is performing preparation for release and release operation. It corresponds to time (at the time of opening transition).
- “2” during engagement is defined as the normal engagement time R2 as described above, and corresponds to the time during which the clutch 13 is engaged (when engaged).
- the forced engagement time R2 ' which is the period “3” during forced engagement, corresponds to the time during which the clutch 13 is engaged (when engaged).
- the HST controller 31 determines which clutch status is currently in the clutch status described above (step S101). Thereafter, it is determined whether or not the determined current clutch status is “completely released” (step S102). When the clutch status is “completely released” (step S102, Yes), the target discharge amount of the HST pump 4 is further calculated (step S103).
- step S104 clutch release control is performed (step S104), and the process proceeds to step S101.
- step S105 it is further determined whether or not the clutch status is “engagement complete” (step S105).
- step S105 Yes
- the target discharge amount of the HST pump 4 is further calculated (step S106).
- the pump command value is output to control the pump discharge amount so that the target discharge amount is obtained, and the clutch command value is output to maintain the engagement state of the clutch 13 and the clutch engagement control is performed. (Step S107), the process proceeds to Step S101.
- step S105 when the clutch status is not “engagement complete” (step S105, No), it is further determined whether the clutch status is “engaged” or “forced engagement” (step S108). .
- the target discharge amount of the HST pump 4 is further calculated (step S109).
- the lower limit value of the pump command value of the HST pump 4 is acquired (step S110).
- the time during clutch engagement control performed between time t11 and time t12 corresponds to the normal engagement end time R2 shown in FIG.
- step S108 when the clutch status is not “engaged” or “forced engagement” (No in step S108), the clutch status is “preparation for release” or “under release” (step S112), and the HST pump 4 The target discharge amount is calculated (step S113). Further, the upper limit value of the pump command value of the HST pump 4 is acquired (step S114). Then, as shown in FIG. 3, under the limitation of the upper limit value, the pump command value is output so as to be the target discharge amount, the pump discharge amount control is performed, and the clutch command value for releasing the clutch 13 is set. The output is performed to perform the clutch release control (step S115), and the process proceeds to step S101. As shown in FIG.
- the clutch release control is a motor capacity control for the HST motors 10a and 10b, a clutch control for the clutch 13, and a pump discharge amount for the HST pump 4, which are performed from time t1 to time t3. It means a combination of the three controls.
- the time during the clutch release control that is performed between time t1 and time t3 corresponds to the release transition time R1 shown in FIG. 5 as described above.
- step S111 control during clutch engagement transition (control during clutch engagement) between time points t11 and t12 in FIG. 4 is performed, and in step S115, clutch release transition between time points t1 and t3 in FIG. Time control (clutch release control).
- FIGS. 7 and 8 are diagrams showing the upper limit value or the lower limit value of the pump command value according to the accelerator opening with respect to the engine speed.
- the upper limit value of the pump command value acquired in step S114 is acquired with reference to the graph data shown in FIG.
- the upper limit data is stored in advance in a storage device such as a memory of the HST controller 31.
- the lower limit value of the pump command value acquired in step S110 is acquired with reference to the data of the graph shown in FIG.
- the lower limit data is stored in advance in a storage device such as a memory of the HST controller 31.
- curves LA11 and LA21 in FIGS. 7 and 8 indicate when the accelerator opening is large, for example, when the accelerator opening is 90% or more, and curves LA12 and LA22 indicate when the accelerator opening is medium.
- the accelerator opening is 70%
- the curves LA13 and LA23 indicate when the accelerator opening is small, for example, when the accelerator opening is 50% or less.
- the upper limit value or lower limit value of such a pump command value (pump discharge amount) is set in advance, and the upper limit value or the lower limit value is selected according to the load of the work vehicle, and motor capacity control, clutch control, pump discharge amount control As a result, the suppression or increase of the pump discharge amount at the time of clutch release transition or clutch engagement transition is reliably and appropriately controlled.
- the clutch status has six types of clutch status, and the clutch status shifts when the condition of transition condition is satisfied. Details of this transition condition will be described.
- FIG. 9 shows clutch status transition conditions. Each clutch status has been described with reference to FIG. 5, but the clutch status is changed when the respective clutch status satisfies the respective transition conditions.
- Transition condition 1- When the clutch status shifts from disengagement complete to engaged The transition condition when the disengagement complete clutch status “1” shifts to the engaged clutch status “2” will be described. If the condition (engagement condition (1)) that is equal to or less than a certain threshold value of the output shaft rotational speed is satisfied when the clutch status is less than 1 second after the clutch status becomes “1”, the process shifts to the clutch status “2”.
- the output shaft rotational speed at a certain threshold is the output shaft rotational speed obtained with reference to the graph shown in FIG. That is, the threshold output shaft speed is obtained from the accelerator opening (throttle output amount) detected by the accelerator opening sensor 33 using the graph corresponding to the engagement condition (1).
- the time during which the clutch status continues to be the same is measured by a counter or the like.
- the clutch status becomes “1” and is 1 second or longer, if the condition (engagement condition (2)) that is equal to or greater than a certain threshold output shaft speed is satisfied, the clutch status is shifted to “2”.
- the output shaft rotational speed at a certain threshold is the output shaft rotational speed obtained with reference to the graph of the engagement condition (2) shown in FIG.
- Transition condition 2- (2) When the clutch status shifts from engaged to forced engagement About the transition condition when the clutch status “2” during engagement shifts to the clutch status “3” during forced engagement explain. If the condition (forced engagement condition (1)) that is equal to or lower than a certain threshold output shaft speed is satisfied at the time of high load, the state shifts to the clutch status “3”.
- the output shaft rotational speed with a certain threshold is obtained with reference to the graph of the forced engagement condition (1) shown in FIG.
- the state at the time of high load means the following things.
- the hydraulic pressure (HST pressure) detected by the HST pressure sensor 37 is equal to or higher than a predetermined value, the vehicle status is not FR shuttle or RF shuttle, and the clutch status is “engaged”.
- the vehicle speed sensor 36 detects that a predetermined amount of rotation speed has decreased from the output shaft rotation speed at the time when a predetermined time (for example, 0.3 seconds) has passed and became “engaged”. State. In other words, as described above, when a load is placed on the bucket 53 of the wheel loader 50 and approaches the climbing path, the scene in which the clutch 13 that has been released is quickly engaged and the traction force is to be generated is the case when the load is high. Corresponds to the state. Further, if the condition (forced engagement condition (2)) that is equal to or less than a certain threshold value of the output shaft rotation speed is satisfied at the time of shuttle or low load, the clutch status from the engaged clutch status “2” to the forced engagement clutch status. Move to “3”.
- a predetermined time for example, 0.3 seconds
- the output shaft rotational speed at a certain threshold is obtained with reference to the forced engagement condition (2) graph shown in FIG.
- the state at the time of shuttle or at the time of low load means the following states.
- the time of shuttle is when the wheel loader 50 loads the load into the bucket 53, when traveling forward and switching to reverse traveling without stopping completely, or when traveling backward and switching to forward traveling without completely stopping.
- the shuttle time is a vehicle status “3” or “4” which means a shuttle time in terms of a vehicle status described later.
- Transition condition 4- When the clutch status shifts from engagement complete to release preparation A transition condition when the engagement completion clutch status “4” shifts to the release preparation clutch status “0” will be described.
- the clutch command value is 100% as shown in FIG. Therefore, when the clutch status “4” is less than 2 seconds and the condition (open condition (1)) equal to or higher than a certain output shaft rotational speed is satisfied, the clutch status “0” is entered.
- the output shaft rotational speed at a certain threshold is the output shaft rotational speed obtained by referring to the graph of the open condition (1) shown in FIG.
- the output shaft rotational speed at a certain threshold is the output shaft rotational speed obtained by referring to the graph of the open condition (2) shown in FIG.
- Transition condition 2- (1) When the clutch status shifts from engaged to fully engaged The transition condition when shifting from engaged clutch status “2” to engaged clutch status “4” will be described. . When the normal engagement end time R2 shown in FIG. 5 has elapsed, the clutch status shifts to “4”.
- Transition condition 2- (3) When the clutch status shifts from engaged to fully released The transition condition when shifting from engaged clutch status “2” to fully released clutch status “1” will be described. If the detected output shaft rotational speed is equal to or higher than a predetermined rotational speed and the condition that the speed stage is 3rd speed or 4th speed is satisfied, the clutch status is shifted to “1”.
- Transition condition 3- (1) When the clutch status shifts from being engaged forcibly to complete engagement Regarding the transition condition for shifting from clutch status “3” during forced engagement to clutch status “4” when engagement is complete explain. Transition is made when the pump target command value reaches 100%. As described above with reference to FIG. 5, when the clutch 13 is forcibly engaged while the clutch 13 is engaged, the pump command value is increased and the pump command value is set to 100 to immediately engage the clutch 13. % (See the broken line in FIG. 5), but when it reaches 100%, the clutch status shifts to engagement complete.
- Transition condition 3- (2) When the clutch status shifts from being engaged forcibly to fully disengaged The transition condition for shifting from the clutch status “3” during forced engagement to the clutch status “1” that is completely released will be described. . Here, the clutch status is shifted under the same condition as the transition condition 2- (3).
- Transition condition 0- (1) When the clutch status shifts from release preparation to release The transition condition when the release preparation clutch status “0” changes to the release clutch status “5” will be described. In the opening preparation, the clutch command value is 100% as shown in FIG. 5, but the motor command value is decreased as shown in FIG. When a predetermined time (for example, 0.01 seconds) elapses after the motor command value becomes equal to or less than a certain value (for example, 27%), the clutch status is shifted.
- a predetermined time for example, 0.01 seconds
- Transition condition 5- When the clutch status shifts from being released to being completely released The transition condition when shifting from the released clutch status “5” to the released clutch status “1” will be described. During release, as shown in FIG. 5, the clutch command value is decreased at a predetermined rate. When the clutch command value falls below a certain value (for example, 30%), the clutch status is shifted.
- the vehicle status includes “0” during stop, “1” forward, “2” reverse, “FR shuttle“ 3 ”, RF shuttle“ 4 ”, forward N stop“ 5 ”, reverse N stop.
- the current vehicle status (current vehicle status) of the vehicle status is the next vehicle status determined from the state of the previous work vehicle. That is, the next vehicle status is determined by the information of the four elements of the current vehicle status, the position of the forward / reverse switching lever 34, the rotational direction detected by the vehicle speed sensor 36, and the output shaft rotational speed.
- the forward / reverse switching lever 34 has three types of positions: forward “F”, reverse “R”, and neutral “N”.
- the position of the forward / reverse switching lever 34 is determined by an operator's operation. That is, when the wheel loader 50 is moved forward, it is operated to the forward “F”. When the wheel loader 50 is moved backward, the wheel loader 50 is operated to the reverse “R”, and the engine 1 is idled to stop the wheel loader 50. Operated to neutral “N”.
- the position of the forward / reverse switching lever 34 is electrically detected by a contact switch or the like, and forward “F”, reverse “R”, and neutral “N” are acquired as operation selection forward / reverse data.
- the current state being stopped is a state where the wheel loader 50 is not traveling.
- the current state is forward.
- the wheel loader 50 is traveling forward.
- the current state is backward. In this state, the vehicle is traveling backward.
- the vehicle state FR shuttle is a state in which the wheel loader 50 is immediately switched from forward travel to reverse travel
- the vehicle state is RF shuttle in which the wheel loader 50 is immediately switched from reverse travel to forward travel.
- the vehicle state is forward N stop is a state in which the forward / reverse switching lever 34 is operated neutrally while the wheel loader 50 is traveling forward.
- the vehicle state is reverse N stop is a state in which the forward / reverse switching lever 34 is operated to be neutral while the wheel loader 50 is traveling backward.
- the output shaft rotational speed detected by the vehicle speed sensor 36 has a magnitude relationship with preset threshold values (Vzero, Vs) depending on the current vehicle status and operation selection forward / reverse data. Are compared.
- the threshold value Vzero is a value for determining whether or not the wheel loader 50 is in a stopped state, and the output shaft rotational speed is a value close to 0 (rpm).
- the threshold value Vs is a value larger than Vzero.
- the threshold value Vs is used to determine whether or not the next vehicle status should be “0” when the wheel loader 50 performs the shuttle operation. In the shuttle operation, since the forward / reverse switching is performed immediately, the output shaft rotational speed has a certain value immediately after the switching. Therefore, not only the threshold value Vzero but also two threshold values, the threshold value Vs, are set, and the next vehicle status is determined using a logical sum described later.
- the transition condition from the current vehicle status to the next vehicle status is the logical product (AND) of the position of the forward / reverse switching lever 34 (operation selection forward / backward data), the rotational direction data of the vehicle speed sensor, and the output shaft rotational speed data. Is determined by using a logical sum (OR) of the condition A that is and the condition B that is the output shaft rotation speed.
- the vehicle status can be obtained by constantly monitoring the conditions A and B related to the transition condition.
- Output shaft rotational speed as a threshold value necessary for changing the clutch status based on the vehicle status obtained as described above and the accelerator opening (throttle output amount) detected by the accelerator opening sensor 33 (The output shaft rotation speed at a certain threshold is determined). That is, when the vehicle status is forward “1” or reverse “2”, the output shaft rotational speed as a threshold can be obtained by using the data of the graph shown in FIG. 11 (hereinafter referred to as the first map). . When the vehicle status is FR shuttle “3”, RF shuttle “4”, forward N stop “5”, reverse N stop “6”, the data of the graph shown in FIG. 12 (hereinafter referred to as second map) is used. By using it with reference, the output shaft rotation speed as a threshold value is obtained.
- the first map or the second map is the above-described clutch status transition condition (engagement condition (1), engagement condition (2), forced engagement condition (1), forced engagement condition (2), release.
- Each condition (1) and opening condition (2)) is preset according to the throttle output amount (%) (FIGS. 11 and 12).
- the output shaft rotational speed detected by the vehicle speed sensor 36 is compared with the output shaft rotational speed as a threshold shown in the first map or the second map, and the clutch status transition condition (engagement condition (1), When any one of the engagement condition (2), the forced engagement condition (1), the forced engagement condition (2), the release condition (1), and the release condition (2)) is satisfied, the clutch status is changed.
- the “output shaft rotational speed as a threshold value” is a shift point Vo from the low speed travel to the high speed travel or a shift point Vc from the high speed travel to the low speed travel.
- the shift point Vo is a point where the clutch 13 shifts from the engaged state to the released state
- the shift point Vc is a point where the clutch 13 shifts from the released state to the engaged state.
- the first map of FIG. 11 or the second map of FIG. The clutch status is determined by referring to the output shaft speed.
- the current clutch status is obtained by monitoring changes in the output shaft speed.
- pump discharge amount control and clutch control release control / engagement control
- step S210 the vehicle status (next vehicle status) is determined (step S210).
- information on the current vehicle status is obtained, information on the position of the forward / reverse switching lever 34 is obtained, and further, the rotation direction and output shaft rotational speed are obtained by the vehicle sensor 36. Get information.
- step S202 information on the accelerator opening is obtained by the accelerator opening sensor 33, and information on the output shaft rotation speed (shift point) corresponding to the vehicle status is obtained (step S202).
- the information on the output shaft rotation speed (shift point) is acquired from the first map or the second map.
- information on the current clutch status is acquired (step S203).
- information on the current output shaft speed is acquired by the vehicle speed sensor (step S204).
- step S205 a determination is made as to whether the clutch status transition condition shown in FIG. 9 is satisfied.
- (1) Current clutch status information (2) Current output shaft rotation speed information (3) Output shaft rotation speed (shift point) information (4) Elapsed time (5) HST pressure detected by HST pressure sensor (6) Current vehicle speed of the work vehicle (7) Current vehicle status information (8) Current pump command value information.
- the transition condition is determined to be satisfied using one or a plurality of pieces of information (1) to (8) depending on the transition condition.
- step S207 clutch control (engagement control / release control), pump discharge amount control of the HST pump 4, and motor capacity control of the HST motors 10a and 10b are performed. Thereafter, the process proceeds to step S210 and the above-described processing is repeated.
- the load on the work vehicle is obtained based on the engine speed and the accelerator opening.
- the load on the work vehicle is obtained based on the engine speed and the intake manifold pressure. Also good.
- Detecting the accelerator opening is indirectly detecting the load state of the engine 1. Therefore, if the pressure of the air passing through the intake manifold (intake manifold pressure) in the intake manifold which is a path for sucking air into the engine 1 is detected using a pressure sensor, the load state of the engine 1 can be determined. Since it is detected directly, the load on the work vehicle can be detected more stably and accurately. As a result, the transition of the clutch status can be performed with high accuracy, and the accuracy of clutch control (release control / engagement control) can be improved.
- the pump discharge amount is suppressed under the restriction of the upper limit value of the pump command value when the clutch is released, and the pump discharge amount is increased under the restriction of the lower limit value of the pump command value when the clutch is engaged. Therefore, the HST motors 10a and 10b are reduced in size so that a large transmission gear ratio is required, and further, a design in which the performance of the engine 1 is improved and a large pump absorption torque is required.
- the impact at the time of engagement or release of the clutch 13 can be suppressed and a smooth clutch operation can be performed, and a good operational feeling is given to the operator. Therefore, it is not necessary to provide a special measure for improving the durability of the clutch or hydraulic equipment of the work vehicle. Therefore, it is possible to quickly and easily cope with a new design or design change of a work vehicle such as the wheel loader 50.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Control Of Fluid Gearings (AREA)
- Control Of Transmission Device (AREA)
- Operation Control Of Excavators (AREA)
Abstract
Description
図1は、作業車両の一例であるホイールローダ50の全体構成を示す図である。また、図2は、ホイールローダ50の駆動系を中心に示した回路構成を示す図である。図1に示すように、ホイールローダ50は、車体51と、車体51の前部に装着されたリフトアーム52やリフトアーム52の先端に取り付けられたバケット53、ベルクランク56などで構成される作業機と、車体51を支持しながら回転して車体51を走行させる4本のタイヤ54と、車体51の上部に搭載されたキャブ(運転室)55とを有する。
このホイールローダ50は、図2に示すように、エンジン1によって駆動されるHSTポンプ(走行用油圧ポンプ)4から吐き出された作動油によってHSTモータ(走行用油圧モータ)10a,10bを駆動してホイールローダ50を走行させるためのHST回路20を有する。HST回路20は、HSTポンプ4に対して、2つのHSTモータ10a,10bが並列接続され、閉じた油圧回路を構成した1ポンプ2モータ形式のHSTシステムである。また、このHST回路20は、低速走行時は、2つのHSTモータ10a,10bを駆動して出力軸15へ動力を伝えてホイールローダ50を走行させ、高速走行時は、クラッチ13を開放させてHSTモータ10aから出力軸15への動力の伝達を切り離し、HSTモータ10bのみを駆動してホイールローダ50を走行させる。
ここで、HSTコントローラ31によるクラッチ開放移行時の制御概要とクラッチ係合移行時の制御概要について説明する。まず、図3に示したタイムチャートを参照して、クラッチ13を係合状態から開放状態に移行するクラッチ開放移行時の制御について説明する。図3(a)は、時間(車速)に対するHSTモータ10a、10bに指示されるモータ指令値の変化を示し、特性線Laは、HSTモータ10aに対するモータ指令値を示し、特性線LbはHSTモータ10bに対するモータ指令値を示す。図3(b)は、時間(車速)に対するクラッチ13の開放と係合の状態を指示するクラッチ指令値の変化を示す。ここで、クラッチ指令値が0%とは、クラッチ13を開放させることを意味し、クラッチ指令値が100%とは、クラッチ13を完全に係合させることを意味する。図3(c)は、時間(車速)に対するHSTポンプ4に指示されるポンプ指令値の変化を示す。なお、図3では、時間が0から進むにつれてホイールローダ50の車速は低速走行から高速走行へ移行していることとなる。まず、2つのHSTモータ10a,10bが係合状態でオペレータがアクセルペダル33aを踏み込むことでアクセル開度を大きくしてホイールローダ50が走行し始めると、負荷が大きくなり、ポンプ指令値を100%まで大きくして(ここでは、斜板角を100%(ポンプ容量を最大)まで傾けて)、多くのポンプ吐出量とともに大きなトルクを出力する。そして、たとえば5秒経った時点t1で車速がSp(km/h)の変速点に達すると、開放準備状態となり、この時点t1で100%のポンプ指令値は、後述する上限値Pdよりも小さい値であって、直前のポンプ指令値よりも小さいポンプ指令値Pdとなり(図3(c))、HSTポンプ10a,10bのポンプ吐出量が抑制される。また、HSTモータ10aのモータ指令値(斜板角の傾角により定まるモータ容量)を、図3(a)に示すように車速が増すとともに次第に減少させるようにさせていく。クラッチ指令値は、モータ容量が27%になった時点t2から、100%のクラッチ指令値が徐々に減少(モジュレーション)するようにし、クラッチ指令値が30%になった時点t3でクラッチ13は完全に開放されたものとして一挙にクラッチ指令値を0%にする(図3(b))。この時点t3では、クラッチ13が開放されているので、この時点t3からポンプ指令値は、上限値Pdの制限を受けずに100%まで上昇するようにしている(図3(c))。
ここで、上述したクラッチ制御(開放制御・係合制御)およびポンプ吐出量の制御は、クラッチステータスという概念を用いて行う。クラッチステータスは、図5に示すように、6種のステータスの定義があり、クラッチステータスが「0」のときは「開放準備」、「1」のときは「開放完」、「2」のときは「係合中」、「3」のときは「強制係合中」、「4」のときは「係合完」、「5」のときは「開放中」である。なお、クラッチステータス間の移行、すなわちクラッチ制御(開放制御・係合制御)は、図5に示した目標クラッチ指令値をHSTコントローラ31が出力することによって実行される。なお、図5に示した、時間と目標クラッチ指令値の関係を表したグラフは、図3(b)および図4(b)を併せて表したものである。
開放完のクラッチステータス「1」から係合中のクラッチステータス「2」に移行する場合の遷移条件について説明する。クラッチステータスが「1」になってから1秒未満の時に、ある閾値の出力軸回転数以下という条件(係合条件(1))を満足すれば、クラッチステータス「2」に移行する。ここで、ある閾値の出力軸回転数とは、図11に示すグラフを参照して求められる出力軸回転数である。すなわち、アクセル開度センサ33によって検出されたアクセル開度(スロットル出力量)から上記の係合条件(1)に対応するグラフを用いて閾値の出力軸回転数を求める。一方、クラッチステータスが同じクラッチステータスを継続している時間(上記のような、クラッチステータスが「1」になってから1秒未満)は、カウンタなどによって計測する。また、クラッチステータスが「1」になって1秒以上の時に、ある閾値の出力軸回転数以上という条件(係合条件(2))を満足すれば、クラッチステータス「2」に移行する。ここでも、ある閾値の出力軸回転数とは、図11に示す係合条件(2)のグラフを参照して求められる出力軸回転数である。
係合中のクラッチステータス「2」から強制係合中のクラッチステータス「3」に移行する場合の遷移条件について説明する。高負荷時で、ある閾値の出力軸回転数以下という条件(強制係合条件(1))を満足すれば、クラッチステータス「3」に移行する。ここでも、ある閾値の出力軸回転数とは、図11に示す強制係合条件(1)のグラフを参照して求められるものである。また、高負荷時という状態は、以下のようなことを状態を意味する。HST圧力センサ37で検出される作動油圧(HST圧力)が、あらかじめ規定している値以上であって、かつ、車両ステータスがFRシャトルあるいはRFシャトルでなく、クラッチステータスが「係合中」になってから所定の時間(例えば、0.3秒)が経過し、「係合中」になった時点の出力軸回転数から、規定の量の回転数が減少したことを車速センサ36が検出した状態である。つまり、上記のように、ホイールローダ50のバケット53に積荷を載せて登板路にさしかかった際に、開放されていたクラッチ13をすばやく係合動作させて牽引力を出したい場面が、高負荷時の状態に相当する。また、シャトル時あるいは低負荷時で、ある閾値の出力軸回転数以下という条件(強制係合条件(2))を満足すれば、係合中のクラッチステータス「2」から強制係合のクラッチステータス「3」に移行する。ここでは、ある閾値の出力軸回転数とは、図11に示す強制係合条件(2)のグラフを参照して求められるものである。また、シャトル時あるいは低負荷時という状態は、以下のようなことを状態を意味する。シャトル時とは、ホイールローダ50が積荷をバケット53に積み込むために、前進走行して完全に停止しないまま後進走行に切り替える場合や、後進走行して完全に停止しないまま前進走行に切り替える場合である。すなわち、シャトル時とは、後述する車両ステータスで言えば、シャトル時を意味する、車両ステータス「3」あるいは「4」である。
係合完のクラッチステータス「4」から開放準備のクラッチステータス「0」に移行する場合の遷移条件について説明する。係合完では、図5に示すようにクラッチ指令値は100%である。そこで、クラッチステータス「4」になって2秒未満の時で、ある出力軸回転数以上という条件(開放条件(1))を満足すれば、クラッチステータス「0」に移行する。ここで、ある閾値の出力軸回転数とは、図12に示す開放条件(1)のグラフを参照して求められる出力軸回転数である。また、クラッチステータス「4」になって2秒以上の時で、ある閾値の出力軸回転数以上という条件(開放条件(2))を満足すれば、クラッチステータス「0」に移行する。ここで、ある閾値の出力軸回転数とは、図12に示す開放条件(2)のグラフを参照して求められる出力軸回転数である。
係合中のクラッチステータス「2」から係合完のクラッチステータス「4」に移行する場合の遷移条件について説明する。図5に示した、通常係合終了時間R2が経過したらクラッチステータス「4」に移行する。
係合中のクラッチステータス「2」から開放完のクラッチステータス「1」に移行する場合の遷移条件について説明する。検出された出力軸回転数が、ある規定の回転数以上であって、かつ、速度段が3速あるいは4速であるという条件を満足すれば、クラッチステータスを「1」に移行する。
強制係合中のクラッチステータス「3」から係合完のクラッチステータス「4」に移行する場合の遷移条件について説明する。ポンプ目標指令値が100%に到達した場合に移行する。これは、上記に図5を用いて説明したように、クラッチ13が係合中に強制係合中なると、ポンプ指令値を増加させ、すみやかにクラッチ13を係合動作させるためポンプ指令値を100%にする(図5の破線参照)が、100%に到達したらクラッチステータスを係合完へ移行するのである。
強制係合中のクラッチステータス「3」から開放完のクラッチステータス「1」に移行する場合の遷移条件について説明する。ここでは、遷移条件2-(3)と同じような条件でクラッチステータスを移行する。
開放準備のクラッチステータス「0」から開放中のクラッチステータス「5」に移行する場合の遷移条件について説明する。開放準備では、図5に示すようにクラッチ指令値は100%であるが、モータ指令値は図3に示すように減少させていく。モータ指令値がある値(例えば27%)以下になってから、所定の時間(例えば、0.01秒)が経過したらクラッチステータスを移行する。
開放中のクラッチステータス「5」から開放完のクラッチステータス「1」に移行する場合の遷移条件について説明する。開放中では、図5に示すように、所定の割合でクラッチ指令値を減少させていくが、クラッチ指令値が、ある値(例えば30%)以下になったら、クラッチステータスを移行する。
(1)現在のクラッチステータスの情報
(2)現在の出力軸回転数の情報
(3)出力軸回転数(変速点)の情報
(4)経過時間
(5)HST圧力センサにより検出されるHST圧力の情報
(6)作業車両の現在の車速段
(7)現在の車両ステータスの情報
(8)現在のポンプ指令値の情報
がある。なお、遷移条件によって(1)~(8)のうちの1つあるいは複数の情報を用いて遷移条件の成立判定を行う。
上述した実施の形態では、エンジン回転数とアクセル開度とをもとに作業車両の負荷を求めていたが、エンジン回転数とインテークマニホールド圧とをもとに作業車両の負荷を求めるようにしてもよい。アクセル開度を検出することは、エンジン1の負荷状態を間接的に検出することである。そこで、エンジン1へ空気を吸い込む経路であるインテークマニホールドにおける、インテークマニホールドを通過する空気の圧力(インテークマニホールド圧)を、圧力センサを用いて空気圧を検出するようにすれば、エンジン1の負荷状態を直接的に検出することとなるため、作業車両の負荷をより安定的かつ精度良く検出することができる。結果的に、クラッチステータスの遷移を高精度で行うことができ、クラッチ制御(開放制御・係合制御)の高精度化を図ることができる。
1a エンジン回転数センサ
1b 燃料噴射装置
2 作業機用油圧ポンプ
3 チャージポンプ
4 走行用油圧ポンプ(HSTポンプ)
5 ポンプ制御弁
6 ポンプ容量制御シリンダ
7,8 高圧リリーフ弁
9 低圧リリーフ弁
10a,10b 走行用油圧モータ(HSTモータ)
11a,11b モータ制御用電子サーボ弁
12a,12b モータシリンダ
13 クラッチ
14 クラッチ制御弁
15 出力軸
19a 作業機用油圧シリンダ(リフトシリンダ)
19b 作業機用油圧シリンダ(バケットシリンダ)
20 HST回路
30 車体コントローラ
31 HSTコントローラ
32 エンジンコントローラ
33 アクセル開度センサ
33a アクセルペダル
34 前後進切換レバー
36 車速センサ
37 HST圧力センサ
50 ホイールローダ
Claims (6)
- エンジンによって駆動される油圧ポンプと2つの油圧モータとが閉回路であって前記油圧ポンプに対して前記2つの油圧モータが並列接続された油圧回路を有し、1つの油圧モータの出力軸への動力の伝達がクラッチを介して行われるように前記クラッチの開放または係合が行われ、該1つまたは2つの油圧モータの動力によって走行する作業車両の制御装置において、
前記作業車両の作業車両負荷をスロットル出力量と前記エンジンのエンジン回転数から求める負荷検出手段と、
前記クラッチの開放移行制御時に、前記負荷検出手段により求めた作業車両負荷をもとに、予め求められた前記油圧ポンプの上限吐出量の制限下で前記油圧ポンプのポンプ吐出量を小さくする制御を行い、前記クラッチの係合移行制御時に、前記負荷検出手段により求めた作業車両負荷をもとに予め求められた前記油圧ポンプの下限吐出量の制限下で前記油圧ポンプのポンプ吐出量を大きくする制御を行う制御手段を備えたことを特徴とする作業車両の制御装置。 - 前記作業車両負荷は、エンジン回転数とアクセル開度あるいはインテークマニホールド圧とをもとに求めることを特徴とする請求項1に記載の作業車両の制御装置。
- 前記制御手段は、クラッチの開放状態、開放中状態、係合状態および係合中状態を含んだクラッチ状態を示すクラッチステータスをもとに前記クラッチの開放移行制御時および係合移行制御時を判定することを特徴とする請求項1または2に記載の作業車両の制御装置。
- 前記クラッチステータスは、作業車両の走行状態の遷移を示す車両ステータスと、アクセル開度をもとに求められた前記出力軸の回転数とをもとに遷移することを特徴とする請求項3に記載の作業車両の制御装置。
- エンジンによって駆動される油圧ポンプと2つの油圧モータとが閉回路であって前記油圧ポンプに対して前記2つの油圧モータが並列接続された油圧回路を有し、1つの油圧モータの出力軸への動力の伝達がクラッチを介して行われるように前記クラッチの開放または係合が行われ、該1つまたは2つの油圧モータの動力によって走行する作業車両の制御方法において、
前記作業車両の作業車両負荷をスロットル出力量と前記エンジンのエンジン回転数から作業車両負荷を求め、
前記クラッチの開放移行制御時に、求めた作業車両負荷をもとに予め求められた前記油圧ポンプの上限吐出量の制限下で前記油圧ポンプのポンプ吐出量を小さくする制御を行い、前記クラッチの係合移行制御時に、求めた作業車両負荷をもとに予め求められた前記油圧ポンプの下限吐出量の制限下で前記油圧ポンプのポンプ吐出量を大きくする制御を行うことを特徴とする作業車両の制御方法。 - 前記作業車両負荷は、エンジン回転数とアクセル開度あるいはインテークマニホールド圧とをもとに求めることを特徴とする請求項5に記載の作業車両の制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201280002456.0A CN103069198B (zh) | 2011-04-27 | 2012-04-17 | 作业车辆的控制装置及作业车辆的控制方法 |
| US13/814,782 US8888657B2 (en) | 2011-04-27 | 2012-04-17 | Control apparatus of working vehicle and control method thereof |
| EP12776653.3A EP2594828B1 (en) | 2011-04-27 | 2012-04-17 | Control device and control method for work vehicle |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011100048A JP5119349B2 (ja) | 2011-04-27 | 2011-04-27 | 作業車両の制御装置およびその制御方法 |
| JP2011-100048 | 2011-04-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012147572A1 true WO2012147572A1 (ja) | 2012-11-01 |
Family
ID=47072094
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/060381 WO2012147572A1 (ja) | 2011-04-27 | 2012-04-17 | 作業車両の制御装置およびその制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8888657B2 (ja) |
| EP (1) | EP2594828B1 (ja) |
| JP (1) | JP5119349B2 (ja) |
| CN (1) | CN103069198B (ja) |
| WO (1) | WO2012147572A1 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011113485A1 (de) * | 2011-09-15 | 2013-03-21 | Bomag Gmbh | Verfahren zum Ansteuern eines Antriebsstranges eines Fahrzeugs und Vorrichtung zur Durchführung des Verfahrens |
| JP5875970B2 (ja) * | 2012-12-21 | 2016-03-02 | 愛三工業株式会社 | 自動車の燃料供給装置 |
| CN106104101B (zh) | 2014-03-03 | 2018-05-01 | 凯斯纽荷兰(中国)管理有限公司 | 小型轮式装载机 |
| GB2531762A (en) | 2014-10-29 | 2016-05-04 | Bamford Excavators Ltd | Working machine |
| GB2531767A (en) * | 2014-10-29 | 2016-05-04 | Bamford Excavators Ltd | Working Machine |
| JP6657845B2 (ja) * | 2015-11-24 | 2020-03-04 | 株式会社タダノ | 軌陸車の滑走防止装置 |
| CN106895138B (zh) * | 2017-02-13 | 2018-09-28 | 山推道路机械有限公司 | 一种压路机控制系统及其控制方法 |
| JP6823500B2 (ja) * | 2017-03-03 | 2021-02-03 | 株式会社小松製作所 | 作業車両および制御方法 |
| JP6321302B2 (ja) * | 2017-04-24 | 2018-05-09 | 株式会社小松製作所 | 制御システム及び作業機械 |
| DE102017211232A1 (de) * | 2017-07-03 | 2019-01-03 | Robert Bosch Gmbh | Fahrantrieb und Verfahren zum Ansteuern eines Fahrantriebs |
| US11242672B2 (en) * | 2017-09-29 | 2022-02-08 | Hitachi Construction Machinery Co., Ltd. | Wheel loader |
| JP7038516B2 (ja) * | 2017-09-29 | 2022-03-18 | 日立建機株式会社 | ホイールローダ |
| US11679806B2 (en) * | 2017-11-30 | 2023-06-20 | Cnh Industrial America Llc | Reactive steering system for a work vehicle having an articulated chassis |
| JP7152163B2 (ja) * | 2018-02-14 | 2022-10-12 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| JP6924159B2 (ja) | 2018-02-23 | 2021-08-25 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| JP6971888B2 (ja) * | 2018-03-05 | 2021-11-24 | 株式会社小松製作所 | 作業車両、作業車両を含むシステムおよび作業車両の積載重量算出方法 |
| EP3660229B1 (en) * | 2018-09-28 | 2022-08-03 | Hitachi Construction Machinery Co., Ltd. | Loading vehicle |
| JP7155034B2 (ja) | 2019-02-15 | 2022-10-18 | 株式会社小松製作所 | 作業機械の制御システム |
| US11459731B2 (en) * | 2019-10-28 | 2022-10-04 | Kubota Corporation | Working machine |
| CN111828607B (zh) * | 2020-06-12 | 2021-07-30 | 江苏汇智高端工程机械创新中心有限公司 | 一种装载机起步与动力换向控制方法及系统 |
| KR102575818B1 (ko) * | 2021-11-16 | 2023-09-07 | 대한민국 | 농업용 작업차량의 이산화탄소 배출량 제어장치 및 제어방법 |
| EP4428401A1 (en) * | 2023-03-10 | 2024-09-11 | Robert Bosch GmbH | Method for calibrating a coupling system of a mechanical transmission |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09125464A (ja) * | 1995-11-07 | 1997-05-13 | Hitachi Constr Mach Co Ltd | 油圧駆動走行装置 |
| JP2001304408A (ja) * | 2000-10-06 | 2001-10-31 | Komatsu Ltd | 油圧モータの容量制御装置 |
| JP2001336602A (ja) * | 2000-05-31 | 2001-12-07 | Komatsu Ltd | 複数モータの油圧駆動システム |
| JP2008190637A (ja) * | 2007-02-05 | 2008-08-21 | Tadano Ltd | 軌陸車の軌道走行用油圧回路 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE8915954U1 (de) * | 1989-03-09 | 1992-06-25 | O & K Orenstein & Koppel Ag, 1000 Berlin | Stufenlos regelbarer hydrostatischer Fahrantrieb |
| JP3653839B2 (ja) * | 1995-01-31 | 2005-06-02 | マツダ株式会社 | 自動変速機の油圧制御装置 |
| JPH09310747A (ja) * | 1996-05-22 | 1997-12-02 | Komatsu Ltd | 油圧機械式変速装置の制御装置及び制御方法 |
| JP3370913B2 (ja) | 1997-12-04 | 2003-01-27 | 株式会社山武 | 弁装置 |
| JPH11166623A (ja) | 1997-12-08 | 1999-06-22 | Komatsu Ltd | 複数の油圧モータとクラッチの制御装置および制御方法 |
| JP4067069B2 (ja) | 1997-12-12 | 2008-03-26 | 株式会社小松製作所 | 複数の油圧モータとクラッチの制御装置 |
| JP2000081109A (ja) * | 1998-09-02 | 2000-03-21 | Kayaba Ind Co Ltd | ハイドロスタティックトランスミッション装置 |
| US7247122B2 (en) * | 2005-01-12 | 2007-07-24 | Caterpillar Inc. | Downshift in hydrostatic drive work machine |
| JP4633798B2 (ja) | 2005-07-22 | 2011-02-16 | 株式会社小松製作所 | 走行車両の無段変速装置及びその無段変速方法 |
| WO2007072688A1 (ja) * | 2005-12-22 | 2007-06-28 | Komatsu Ltd. | 建設車両 |
| JP5171053B2 (ja) * | 2007-02-09 | 2013-03-27 | 日立建機株式会社 | 油圧駆動車両のクラッチ制御装置 |
| JP5069518B2 (ja) * | 2007-08-10 | 2012-11-07 | 日立建機株式会社 | 作業機械の走行システム |
| US8287433B2 (en) * | 2008-01-10 | 2012-10-16 | Komatsu Ltd. | Work vehicle |
-
2011
- 2011-04-27 JP JP2011100048A patent/JP5119349B2/ja active Active
-
2012
- 2012-04-17 CN CN201280002456.0A patent/CN103069198B/zh active Active
- 2012-04-17 WO PCT/JP2012/060381 patent/WO2012147572A1/ja active Application Filing
- 2012-04-17 US US13/814,782 patent/US8888657B2/en active Active
- 2012-04-17 EP EP12776653.3A patent/EP2594828B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09125464A (ja) * | 1995-11-07 | 1997-05-13 | Hitachi Constr Mach Co Ltd | 油圧駆動走行装置 |
| JP2001336602A (ja) * | 2000-05-31 | 2001-12-07 | Komatsu Ltd | 複数モータの油圧駆動システム |
| JP2001304408A (ja) * | 2000-10-06 | 2001-10-31 | Komatsu Ltd | 油圧モータの容量制御装置 |
| JP2008190637A (ja) * | 2007-02-05 | 2008-08-21 | Tadano Ltd | 軌陸車の軌道走行用油圧回路 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2594828A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103069198B (zh) | 2015-03-25 |
| US8888657B2 (en) | 2014-11-18 |
| US20130136624A1 (en) | 2013-05-30 |
| EP2594828A4 (en) | 2015-01-07 |
| EP2594828A1 (en) | 2013-05-22 |
| CN103069198A (zh) | 2013-04-24 |
| JP2012229790A (ja) | 2012-11-22 |
| EP2594828B1 (en) | 2016-07-20 |
| JP5119349B2 (ja) | 2013-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5119349B2 (ja) | 作業車両の制御装置およびその制御方法 | |
| JP4270505B2 (ja) | 作業車両のエンジンの負荷制御装置 | |
| JP5161380B1 (ja) | 作業車両及び作業車両の制御方法 | |
| JP6629121B2 (ja) | 作業機の油圧システム | |
| KR100801930B1 (ko) | 작업차량의 엔진의 부하 제어장치 | |
| JP5072926B2 (ja) | 作業車両 | |
| US20090238696A1 (en) | Traveling control apparatus for hydraulic traveling vehicle | |
| JP5092060B1 (ja) | 作業車両及び作業車両の制御方法 | |
| US8701818B2 (en) | Work vehicle and control method for work vehicle | |
| JP5113946B1 (ja) | 作業車両及び作業車両の制御方法 | |
| KR102445784B1 (ko) | 유체정역학 옵션을 구비하는 유압 하이브리드 추진 회로 및 작동 방법 | |
| JP5092061B1 (ja) | 作業車両及び作業車両の制御方法 | |
| WO2008004589A1 (fr) | Dispositif de commande de moteur pour une machine de construction | |
| JP2006194444A (ja) | 流動静力学ドライブ作業機械の減速方法 | |
| JP6139424B2 (ja) | 作業車両の原動機制御装置 | |
| WO2013145340A1 (ja) | ホイールローダ及びホイールローダの制御方法 | |
| WO2019163360A1 (ja) | 作業車両及び作業車両の制御方法 | |
| JP4787336B2 (ja) | 作業車両のエンジンの負荷制御装置 | |
| JP5092059B1 (ja) | 作業車両及び作業車両の制御方法 | |
| JP5309257B2 (ja) | 作業車両の制御装置およびその制御方法 | |
| JP4707122B2 (ja) | 作業車両のエンジンの負荷制御装置 | |
| JP4282871B2 (ja) | 油圧走行車両 | |
| JP2004286229A (ja) | 油圧式駆動装置の変速装置 | |
| JP2017020384A (ja) | 作業用車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201280002456.0 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12776653 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13814782 Country of ref document: US |
|
| REEP | Request for entry into the european phase |
Ref document number: 2012776653 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2012776653 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |