WO2009122775A1 - 回転位置センサ - Google Patents
回転位置センサ Download PDFInfo
- Publication number
- WO2009122775A1 WO2009122775A1 PCT/JP2009/052188 JP2009052188W WO2009122775A1 WO 2009122775 A1 WO2009122775 A1 WO 2009122775A1 JP 2009052188 W JP2009052188 W JP 2009052188W WO 2009122775 A1 WO2009122775 A1 WO 2009122775A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- housing
- axis
- annular
- rotational position
- rotor
- Prior art date
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D11/00—Component parts of measuring arrangements not specially adapted for a specific variable
- G01D11/24—Housings ; Casings for instruments
- G01D11/245—Housings for sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24428—Error prevention
- G01D5/24433—Error prevention by mechanical means
- G01D5/24442—Error prevention by mechanical means by mounting means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D2205/00—Indexing scheme relating to details of means for transferring or converting the output of a sensing member
- G01D2205/60—Means for precisely aligning or centering the disk of a rotary encoder, e.g. fitting jigs
Abstract
本発明の回転位置センサは、ハウジング(10,20)の軸受部により所定の軸線(L)回りに回動自在に支持される回転体(40)、回転体の回転角度位置を検出するべく回転体に設けられた可動センサ要素(71)及びハウジングに設けられた固定センサ要素(72)を含むセンサユニット(70)を備え、回転体(40)は軸線(L)上に頂点(P)をもつ仮想円錐面(C)の一部を画定するテーパ状の環状当接面(42a)を有し、軸受部は仮想円錐面(C)上において環状当接面を回動自在に支持するテーパ状の環状軸受面(32a)を有する。これによれば、回転体は自動調芯作用により常に軸線上に位置付けられるようになっている。したがって、摩耗等の軸受領域の経時的な変化を生じても、回転体の回転角度位置を高精度に検出することができる。
Description
本発明は、回転体の角度位置を検出する回転位置センサに関し、特に、車両等に搭載されるエンジンのスロットルシャフトの回転角度、所定軸回りに揺動するアクセルペダルの踏込み角度等を検出する接触式あるいは非接触式の回転位置センサに関する。
従来の回転位置センサとしては、ラジアル方向の軸受孔及びスラスト方向の軸受端面をもつハウジング、ハウジングの軸受孔に回動自在に挿入されると共に軸受端面に当接される軸部をもつロータ、ロータを所定の回転角度位置に回転付勢するリターンスプリング、ハウジング内においてロータの軸部よりも径方向の外側に形成された円板状の鍔部に対向するように配置され検出用の固定端子が形成された基板、基板の固定端子に接触するようにロータの鍔部に設けられた可動接点、ハウジングの外部に配置されてロータに結合されたアーム等を備え、ロータアームを介してロータが回転すると、ロータの(鍔部に設けられた)可動接点と基板上に配置された端子との接触位置が変化し、この角度位置の変化に応じて変化する電流値等を検出することで、ロータ(すなわちアーム)の回転角度位置を検出するようにしたものが知られている(例えば、特許文献1参照)。
また、他の回転位置センサとしては、ラジアル方向の軸受孔をもつハウジング、ハウジングの軸受孔に回動自在に挿入される軸部をもつシャフト、ハウジング内においてシャフトの軸部よりも径方向の外側に形成された円板状の鍔部に固定されたリング状の可動マグネット、シャフトの軸線方向において可動マグネットを挟むようにハウジングに固定された複数の磁性板、磁性板の間に配置されたホール素子等を備え、シャフトが回転すると、シャフトの可動マグネット(N極及びS極)とハウジングに固定された磁性板及びホール素子との相対的な角度位置が変化し、この角度位置の変化に応じてホール素子を流れる磁束の変化を検出することで、シャフトの回転角度位置を検出するようにしたものが知られている(例えば、特許文献2参照)。
しかしながら、これらの回転位置センサにおいては、ロータあるいはシャフトの軸部をハウジングの軸受孔により回動自在に支持し、この軸部の径方向外側において、検出用の可動接点及び固定端子あるいは可動マグネット及びホール素子等が配置されているため、軸部の外周面あるいは軸受孔の内周面の摩耗等により、本来所定位置に位置決めされるべくロータあるいはシャフトの回転中心が変動し、その結果、可動接点と固定端子との相対的な位置関係あるいは可動マグネットとホール素子との相対的な位置関係が変化し、ロータあるいはシャフトの回転位置を高精度に検出できなくなる虞がある。
また、これらの回転位置センサにおいては、ロータあるいはシャフトの軸部の径方向外側において、検出用の可動接点及び固定端子あるいは可動マグネット及びホール素子等が配置されているため、軸部の領域をこれらの部品の配置領域として有効に利用することができず、構造の大型化を招くという問題があった。
また、これらの回転位置センサにおいては、ロータあるいはシャフトの軸部の径方向外側において、検出用の可動接点及び固定端子あるいは可動マグネット及びホール素子等が配置されているため、軸部の領域をこれらの部品の配置領域として有効に利用することができず、構造の大型化を招くという問題があった。
本発明は、上記従来の装置の事情に鑑みて成されたものであり、その目的とするところは、回転位置が検出されるロータあるいはシャフト等の回転体を、その軸受領域の摩耗等による経時的な変化を生じても、自動的に調芯作用が得られるように支持して、回転体の回転角度位置を高精度に検出することができ、又、回転体の軸線(回転中心線)上に位置する領域を部品の配置場所として有効に利用することで、構造の簡素化、小型化等を図れる回転位置センサを提供することにある。
本発明の回転位置センサは、軸受部を有するハウジングと、軸受部により所定の軸線回りに回動自在に支持される回転体と、回転体の回転角度位置を検出するべく回転体に設けられた可動センサ要素及びハウジングに設けられた固定センサ要素を含むセンサユニットとを備え、上記回転体は、軸線を中心とする環状当接面を有し、上記軸受部は、軸線を中心としかつ環状当接面を受ける環状軸受面を有し、環状当接面及び環状軸受面の少なくとも一方は、軸線上に頂点をもつ仮想円錐面の一部を画定する環状テーパ面に形成されている、構成となっている。
この構成によれば、回転体と軸受部は、環状当接面が環状軸受面に接触して所定の軸線回りに回動自在に支持され、かつ、環状当接面及び環状軸受面の少なくとも一方が所定の軸線上に頂点をもつ仮想円錐面の一部を画定する環状テーパ面に形成されているため、回転体は、自動調芯作用により常に軸線上に位置付けられるようになっている。したがって、摩耗等の軸受領域の経時的な変化を生じても、センサユニットを構成する回転体の可動センサ要素とハウジングの固定センサ要素との軸線に対する位置ずれを防止でき、回転体の回転角度位置を高精度に検出することができる。
この構成によれば、回転体と軸受部は、環状当接面が環状軸受面に接触して所定の軸線回りに回動自在に支持され、かつ、環状当接面及び環状軸受面の少なくとも一方が所定の軸線上に頂点をもつ仮想円錐面の一部を画定する環状テーパ面に形成されているため、回転体は、自動調芯作用により常に軸線上に位置付けられるようになっている。したがって、摩耗等の軸受領域の経時的な変化を生じても、センサユニットを構成する回転体の可動センサ要素とハウジングの固定センサ要素との軸線に対する位置ずれを防止でき、回転体の回転角度位置を高精度に検出することができる。
上記構成において、ハウジングは、別個に形成されたガイド部材を含み、ガイド部材は環状軸受面を有する、構成を採用することができる。
この構成によれば、環状軸受面をハウジングとは別個に形成されたガイド部材により形成することで、ハウジングの材料とは異なる耐摩耗性に優れた専用の材料を用いることができる。したがって、軸受領域の耐摩耗性等を確保しつつ、全体としてのコストを低減することができる。
この構成によれば、環状軸受面をハウジングとは別個に形成されたガイド部材により形成することで、ハウジングの材料とは異なる耐摩耗性に優れた専用の材料を用いることができる。したがって、軸受領域の耐摩耗性等を確保しつつ、全体としてのコストを低減することができる。
上記構成において、環状軸受面は、環状当接面に向けて凸状に湾曲した断面をなすように形成されている、構成を採用することができる。
この構成によれば、回転体の自動調芯作用を確保しつつも、環状当接面と環状軸受面との間の摺動抵抗を低減して、回転体をより円滑に回動させることができる。
この構成によれば、回転体の自動調芯作用を確保しつつも、環状当接面と環状軸受面との間の摺動抵抗を低減して、回転体をより円滑に回動させることができる。
上記構成において、回転体は、ハウジングの外部に配置されて回転角度を検出されるシャフトを連結する連結穴を有する、構成を採用することができる。
この構成によれば、本来的に回転角度位置を検出するべきシャフトを、回転体の連結穴に連結するだけで角度位置の検出が可能になる。したがって、この回転位置センサを独立した汎用性の高いモジュール品として取り扱うことができ、検出されるべくシャフトを含む全ての対象物に対して、この回転位置センサを適用することができる。
この構成によれば、本来的に回転角度位置を検出するべきシャフトを、回転体の連結穴に連結するだけで角度位置の検出が可能になる。したがって、この回転位置センサを独立した汎用性の高いモジュール品として取り扱うことができ、検出されるべくシャフトを含む全ての対象物に対して、この回転位置センサを適用することができる。
上記構成において、回転体は、軸線を中心とする円筒部と、円筒部の一端側に一体的に形成されて環状当接面を画定する円板部とを有し、ハウジングは、環状軸受面を含むハウジング本体と、ハウジング本体に対して着脱自在に形成されると共に円筒部を回動自在に支持する円筒軸受面を含むハウジングカバーと有する、構成を採用することができる。
この構成によれば、回転体がハウジング本体及びハウジングカバーに収容された状態で、回転体は、その円板部の環状当接面がハウジング本体の環状軸受面により回動自在に支持され、その円筒部がハウジングカバーの円筒軸受面により回動自在に支持される。
したがって、組立時には、環状軸受面に環状当接部を当接させるようにして、回転体をハウジング本体に組み込み、円筒部を円筒軸受面に嵌め込むようにして、ハウジングカバーをハウジング本体に結合させることで、回転体をハウジングに容易に組み込むことができる。
この構成によれば、回転体がハウジング本体及びハウジングカバーに収容された状態で、回転体は、その円板部の環状当接面がハウジング本体の環状軸受面により回動自在に支持され、その円筒部がハウジングカバーの円筒軸受面により回動自在に支持される。
したがって、組立時には、環状軸受面に環状当接部を当接させるようにして、回転体をハウジング本体に組み込み、円筒部を円筒軸受面に嵌め込むようにして、ハウジングカバーをハウジング本体に結合させることで、回転体をハウジングに容易に組み込むことができる。
上記構成において、ハウジングには、回転体を所定の角度位置に復帰させる復帰バネが配置され、復帰バネは、円筒部の周りでかつ円板部とハウジングカバーの間に配置され、軸線方向に付勢力を及ぼすと共に軸線回りに付勢力を及ぼす捩りバネである、構成を採用することができる。
この構成によれば、ハウジング本体に回転体を組み込み、回転体の円板部に当接させるようにして、復帰バネとしての捩りバネを回転体の円筒部に嵌め込み、その上方からハウジングカバーをハウジング本体に結合することで、回転体及び復帰バネ(捩りバネ)をハウジングに容易に組み込むことができ、又、回転体のスラスト方向におけるガタツキを確実に防止することができる。
この構成によれば、ハウジング本体に回転体を組み込み、回転体の円板部に当接させるようにして、復帰バネとしての捩りバネを回転体の円筒部に嵌め込み、その上方からハウジングカバーをハウジング本体に結合することで、回転体及び復帰バネ(捩りバネ)をハウジングに容易に組み込むことができ、又、回転体のスラスト方向におけるガタツキを確実に防止することができる。
上記構成において、ハウジングカバーは、ハウジング本体に対して、スナップフィット結合されるように形成されている、構成を採用することができる。
この構成によれば、ハウジングカバーを簡単な構造にてハウジング本体に連結することができ、構造の簡素化、部品点数の削減等を達成することができる。
この構成によれば、ハウジングカバーを簡単な構造にてハウジング本体に連結することができ、構造の簡素化、部品点数の削減等を達成することができる。
上記構成において、センサユニットの可動センサ要素は、円板状に形成されたマグネットを含み、マグネットは、回転体の軸線が通る中央領域に埋設され、センサユニットの固定センサ要素は、マグネットから発せられる磁力線を通すと共に磁束密度の変化を感知し得る磁気感知素子を含み、磁気感知素子は、ハウジングの軸線が通る中央領域に配置されている、構成を採用することができる。
この構成によれば、センサユニットとして、マグネット及び磁気感知素子を含む非接触式の磁気式センサを用いることができ、又、このセンサユニットが回転体の軸線が通る中央領域に配置されるため(すなわち、軸線を中心とした部品配置が可能になるため)、構造の簡略化、小型化等を達成することができる。
この構成によれば、センサユニットとして、マグネット及び磁気感知素子を含む非接触式の磁気式センサを用いることができ、又、このセンサユニットが回転体の軸線が通る中央領域に配置されるため(すなわち、軸線を中心とした部品配置が可能になるため)、構造の簡略化、小型化等を達成することができる。
上記構成をなす回転位置センサによれば、回転位置が検出されるロータあるいはシャフト等の回転体を、その軸受領域の摩耗等による経時的な変化を生じても、自動的に調芯作用が得られるように支持することができ、それ故に、回転体の回転角度位置を高精度に検出することができ、又、回転体の軸線(回転中心線)上に位置する領域を部品の配置場所として有効に利用することで、構造の簡素化、小型化等を達成することができる。
L 軸線
S シャフト
SM スロットル装置
10,10´ ハウジング本体(ハウジング)
11 筒部
11a 収容凹部
12 嵌合部
12´ 軸受部
12a´ 環状軸受面
13 挟持片
14 位置決め突起
15 嵌合溝
16 コネクタ部
17 取付フランジ部
20 ハウジングカバー(ハウジング)
21 貫通孔
22 嵌合部
25 バネ受面
26 掛止突起
30 ガイド部材
31 連結部
32 軸受部
32a,32a´ 環状軸受面
40,40´ ロータ(回転体)
41 円筒部
41a 連結穴
42 円板部
42a,42a´ 環状当接面
43 バネ受面
44 環状位置決め部
45 掛止溝
46 当接片
50 復帰バネ
51 一端部
52 他端部
60 回路基板
70,70´ センサユニット
71,71´ マグネット(可動センサ要素)
72 磁気感知素子(固定センサ要素)
S シャフト
SM スロットル装置
10,10´ ハウジング本体(ハウジング)
11 筒部
11a 収容凹部
12 嵌合部
12´ 軸受部
12a´ 環状軸受面
13 挟持片
14 位置決め突起
15 嵌合溝
16 コネクタ部
17 取付フランジ部
20 ハウジングカバー(ハウジング)
21 貫通孔
22 嵌合部
25 バネ受面
26 掛止突起
30 ガイド部材
31 連結部
32 軸受部
32a,32a´ 環状軸受面
40,40´ ロータ(回転体)
41 円筒部
41a 連結穴
42 円板部
42a,42a´ 環状当接面
43 バネ受面
44 環状位置決め部
45 掛止溝
46 当接片
50 復帰バネ
51 一端部
52 他端部
60 回路基板
70,70´ センサユニット
71,71´ マグネット(可動センサ要素)
72 磁気感知素子(固定センサ要素)
以下、本発明の最良の実施形態について、添付図面を参照しつつ説明する。
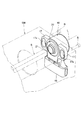
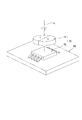
この回転位置センサは、図1に示すように、例えば、エンジンのスロットル装置SMに取り付けられて、スロットルシャフトSの回転角度位置を検出するために適用される。
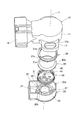
すなわち、この回転位置センサは、図1及び図2に示すように、ハウジングとしてのハウジング本体10及びハウジングカバー20、ハウジング本体10に固定されるガイド部材30、ハウジング内に回動自在に配置される回転体としてのロータ40、ロータ40を所定の角度位置に向けて回転付勢する復帰バネ50、ハウジング本体10に組付けられる回路基板60、ロータ40に設けられた可動センサ要素及び回路基板60に設けられた固定センサ要素を含むセンサユニット70、ハウジング本体10に設けられた端子80等を備えている。
この回転位置センサは、図1に示すように、例えば、エンジンのスロットル装置SMに取り付けられて、スロットルシャフトSの回転角度位置を検出するために適用される。
すなわち、この回転位置センサは、図1及び図2に示すように、ハウジングとしてのハウジング本体10及びハウジングカバー20、ハウジング本体10に固定されるガイド部材30、ハウジング内に回動自在に配置される回転体としてのロータ40、ロータ40を所定の角度位置に向けて回転付勢する復帰バネ50、ハウジング本体10に組付けられる回路基板60、ロータ40に設けられた可動センサ要素及び回路基板60に設けられた固定センサ要素を含むセンサユニット70、ハウジング本体10に設けられた端子80等を備えている。
ハウジング本体10は、図2ないし図6A及び図6Bに示すように、一端が閉じた円筒状の収容凹部11aを画定する筒部11、筒部11の内部において同一の軸線L上に中心をもつように形成され後述するガイド部材30を嵌合する嵌合部12、回路基板60を固定するべく環状の嵌合部12の内側に形成された4つの挟持片13及び1つの位置決め突起14、ハウジングカバー20を嵌合して結合する嵌合溝15、筒部11から径方向に突出し内部に端子80を収容するコネクタ部16、筒部11から径方向に突出する2つの取付フランジ部17等を備えている。
嵌合部12は、後述するガイド部材30を嵌合して、ハウジング本体10に一体的に固定するものであり、図6Aに示すように、円弧状部12a、円弧状部12aから径方向に伸長する平行部12bを画定するように形成されている。
挟持片13及び位置決め突起14は、回路基板60を収容凹部11a内に配置して固定する際に、位置決め突起14で位置合わせを行いつつ、4つの挟持片13で回路基板60の縁部を挟持して固定するべくスナップフィット結合するように形成されている。
嵌合溝15は、後述するハウジングカバー20の嵌合部22(の掛止片22a)を嵌め込んでスナップフィット結合させることにより、ハウジング本体10に一体的に固定するように形成されている。
取付フランジ部17は、円弧状のボルト孔17aを有し、図1に示すように、ボルトBを用いて、角度位置を調整しつつスロットル装置SMの側面に締結して固定されるように形成されている。
挟持片13及び位置決め突起14は、回路基板60を収容凹部11a内に配置して固定する際に、位置決め突起14で位置合わせを行いつつ、4つの挟持片13で回路基板60の縁部を挟持して固定するべくスナップフィット結合するように形成されている。
嵌合溝15は、後述するハウジングカバー20の嵌合部22(の掛止片22a)を嵌め込んでスナップフィット結合させることにより、ハウジング本体10に一体的に固定するように形成されている。
取付フランジ部17は、円弧状のボルト孔17aを有し、図1に示すように、ボルトBを用いて、角度位置を調整しつつスロットル装置SMの側面に締結して固定されるように形成されている。
ハウジングカバー20は、スナップフィット結合により、ハウジング本体10に対して着脱自在に形成されており、図1ないし図4に示すように、後述するロータ40の円筒部41を通して回動自在に支持する貫通孔21、ハウジング本体10の嵌合溝15に嵌合される嵌合部22、軸線L方向における復帰バネ50の一端側を受けるバネ受面25、復帰バネ50の一端部51を掛止する掛止突起26、ロータ40の回転角度範囲を規制する2つのストッパ27等を備えている。
貫通孔21は、ロータ40の円筒部41を円滑に回転させると共に塵等の侵入を阻止するべく、円筒部41の外周面と微小隙間をなす内径寸法に形成されている。
嵌合部22は、図2及び図3に示すように、軸線Lと平行な方向に伸長する3つの掛止片22aを有し、ハウジング本体10の嵌合溝15に嵌め込まれると同時にスナップフィット結合するように形成されている。
バネ受面25は、図4に示すように、後述するロータ40の円板部42と協働して、軸線L方向において復帰バネ50を所定量圧縮した状態で、復帰バネ50の一端側を着座させて受けるように形成されている。
掛止突起26は、復帰バネ50が軸線L回りに捩られた場合に、初期位置に復帰する付勢力を発生させるべく、復帰バネ50の一端部51を掛止するように形成されている。
2つのストッパ27は、図3に示すように、バネ受面25から軸線L方向に突出し、軸線L回りの回転方向において、後述するロータ40の当接片46を当接させて、ロータ40の回転範囲を規制するように形成されている。
嵌合部22は、図2及び図3に示すように、軸線Lと平行な方向に伸長する3つの掛止片22aを有し、ハウジング本体10の嵌合溝15に嵌め込まれると同時にスナップフィット結合するように形成されている。
バネ受面25は、図4に示すように、後述するロータ40の円板部42と協働して、軸線L方向において復帰バネ50を所定量圧縮した状態で、復帰バネ50の一端側を着座させて受けるように形成されている。
掛止突起26は、復帰バネ50が軸線L回りに捩られた場合に、初期位置に復帰する付勢力を発生させるべく、復帰バネ50の一端部51を掛止するように形成されている。
2つのストッパ27は、図3に示すように、バネ受面25から軸線L方向に突出し、軸線L回りの回転方向において、後述するロータ40の当接片46を当接させて、ロータ40の回転範囲を規制するように形成されている。
ガイド部材30は、図3、図4、図5、図7に示すように、ハウジング本体10の嵌合部12に嵌合される連結部31、連結部31と一体的に形成されて環状軸受面32aを画定する環状の軸受部32を備えている。
連結部31は、図3に示すように、円弧状部31a、円弧状部31aから径方向に伸長する2つの平行部31bを画定するように形成され、ガイド部材30の軸線L回りの回転を規制すると共に軸線Lに中心を位置決めするように、嵌合部12に嵌合されるようになっている。
軸受部32は、嵌合部12の端面に当接して、軸線L方向において位置決めされるように、連結部31から径方向に突出する円環状に形成され、その内縁領域において、ロータ40を回動自在に支持する環状軸受面32aを画定している。
環状軸受面32aは、後述するロータ40の環状当接面42aを回動自在に支持するべく、図5に示すように、軸線L上に頂点Pをもつ仮想円錐面Cの一部を画定するように、すなわち、円錐台の外周面を画定する環状テーパ面として形成されている。
連結部31は、図3に示すように、円弧状部31a、円弧状部31aから径方向に伸長する2つの平行部31bを画定するように形成され、ガイド部材30の軸線L回りの回転を規制すると共に軸線Lに中心を位置決めするように、嵌合部12に嵌合されるようになっている。
軸受部32は、嵌合部12の端面に当接して、軸線L方向において位置決めされるように、連結部31から径方向に突出する円環状に形成され、その内縁領域において、ロータ40を回動自在に支持する環状軸受面32aを画定している。
環状軸受面32aは、後述するロータ40の環状当接面42aを回動自在に支持するべく、図5に示すように、軸線L上に頂点Pをもつ仮想円錐面Cの一部を画定するように、すなわち、円錐台の外周面を画定する環状テーパ面として形成されている。
そして、ガイド部材30は、ハウジング本体10とは別個に形成された後、ハウジング本体10の嵌合部12に嵌合されて固定されるようになっている。
このように、ロータ40を回動自在に支持する軸受部として、別個に形成された後にハウジング本体10に固定されるガイド部材30を採用し、このガイド部材30に環状軸受面32aを形成したことにより、ハウジング(ハウジング本体10)の材料とは異なる耐摩耗性に優れた専用の材料を用いることができ、軸受領域の耐摩耗性等を確保しつつ、全体としてのコストを低減することができる。
このように、ロータ40を回動自在に支持する軸受部として、別個に形成された後にハウジング本体10に固定されるガイド部材30を採用し、このガイド部材30に環状軸受面32aを形成したことにより、ハウジング(ハウジング本体10)の材料とは異なる耐摩耗性に優れた専用の材料を用いることができ、軸受領域の耐摩耗性等を確保しつつ、全体としてのコストを低減することができる。
ロータ40は、図2ないし図5、図7に示すように、軸線Lを中心とする円筒部41、円筒部41の一端側に一体的に形成されて環状当接面42aを画定する円板部42、円板部42の上面に形成されて復帰バネ50の他端側を受けるバネ受面43、バネ受面43上において環状に突出するように形成された環状位置決め部44、環状位置決め部44の一部を切り欠くように形成されて復帰バネ50の他端部52を掛止する掛止溝45、ハウジングカバー20のストッパ27に対して軸線L回りの回転方向において当接する当接片46等を備えている。
円筒部41は、その内側において、ハウジング(ハウジング本体10及びハウジングカバー20)の外部に配置されて回転角度を検出されるシャフトSを一体的に回転するように連結する連結穴41aを画定している。
円板部42は、図5に示すように、ガイド部材30の環状軸受面32aに対して回動自在に当接する環状当接面42aを画定している。
環状当接面42aは、図5に示すように、軸線L上に頂点Pをもつ仮想円錐面Cの一部を画定するように、すなわち、円錐台の外周面を画定する環状テーパ面として形成されている。
バネ受面43は、図4に示すように、ハウジングカバー20のバネ受面25と協働して、軸線L方向において復帰バネ50を所定量圧縮した状態で、復帰バネ50の他端側を着座させて受けるように形成されている。
環状位置決め部44は、円筒部41の周りにおいて軸線Lと同軸上に中心をもつ円弧状に形成されており、円板部42(のバネ受面43)上において復帰バネ50が径方向に移動するのを規制するように形成されている。
掛止溝45は、復帰バネ50が軸線L回りに捩られた場合に、初期位置に復帰する付勢力を発生させるべく、復帰バネ50の他端部52を掛止するように形成されている。
当接片46は、復帰バネ50の回転付勢力により、初期位置に位置するとき、一方のストッパ27に当接してそれ以上の回転が規制され、復帰バネ50の回転付勢力に抗して、ロータ40(すなわちシャフトS)が回転させられるとき、他方のストッパ27に当接してそれ以上の回転を規制する(最大回転角度位置を規定する)ように形成されている。
また、ロータ40は、その軸線Lが通る中央領域に埋設されたセンサユニット70の(可動センサ要素としての)マグネット71を含んでいる。
円板部42は、図5に示すように、ガイド部材30の環状軸受面32aに対して回動自在に当接する環状当接面42aを画定している。
環状当接面42aは、図5に示すように、軸線L上に頂点Pをもつ仮想円錐面Cの一部を画定するように、すなわち、円錐台の外周面を画定する環状テーパ面として形成されている。
バネ受面43は、図4に示すように、ハウジングカバー20のバネ受面25と協働して、軸線L方向において復帰バネ50を所定量圧縮した状態で、復帰バネ50の他端側を着座させて受けるように形成されている。
環状位置決め部44は、円筒部41の周りにおいて軸線Lと同軸上に中心をもつ円弧状に形成されており、円板部42(のバネ受面43)上において復帰バネ50が径方向に移動するのを規制するように形成されている。
掛止溝45は、復帰バネ50が軸線L回りに捩られた場合に、初期位置に復帰する付勢力を発生させるべく、復帰バネ50の他端部52を掛止するように形成されている。
当接片46は、復帰バネ50の回転付勢力により、初期位置に位置するとき、一方のストッパ27に当接してそれ以上の回転が規制され、復帰バネ50の回転付勢力に抗して、ロータ40(すなわちシャフトS)が回転させられるとき、他方のストッパ27に当接してそれ以上の回転を規制する(最大回転角度位置を規定する)ように形成されている。
また、ロータ40は、その軸線Lが通る中央領域に埋設されたセンサユニット70の(可動センサ要素としての)マグネット71を含んでいる。
そして、ロータ40は、ハウジング(ハウジング本体10及びハウジングカバー20)に収容された状態で、円板部42の環状当接面42aがハウジング本体10に固定されたガイド部材30の環状軸受面32aにより回動自在に支持され、円筒部41がハウジングカバー20の貫通孔21により回動自在に支持されるようになっている。
したがって、組立時には、環状軸受面32aに環状当接部42aを当接させるようにして、ロータ40をハウジング本体10に組み込み、円筒部41を貫通孔21に嵌め込むようにして、ハウジングカバー20をハウジング本体10にスナップフィット結合させることで、ロータ40をハウジングに容易に組み込むことができる。
また、ロータ40は、ハウジングの外部に配置されて回転角度を検出されるシャフトSを連結する連結穴41aを有するため、本来的に回転角度位置を検出するべきシャフトSを連結穴41aに連結するだけで角度位置の検出が可能になる。
したがって、この回転位置センサを独立した汎用性の高いモジュール品として取り扱うことができ、検出されるべくシャフトSを含む全ての対象物に対して、この回転位置センサを適用することができる。
したがって、組立時には、環状軸受面32aに環状当接部42aを当接させるようにして、ロータ40をハウジング本体10に組み込み、円筒部41を貫通孔21に嵌め込むようにして、ハウジングカバー20をハウジング本体10にスナップフィット結合させることで、ロータ40をハウジングに容易に組み込むことができる。
また、ロータ40は、ハウジングの外部に配置されて回転角度を検出されるシャフトSを連結する連結穴41aを有するため、本来的に回転角度位置を検出するべきシャフトSを連結穴41aに連結するだけで角度位置の検出が可能になる。
したがって、この回転位置センサを独立した汎用性の高いモジュール品として取り扱うことができ、検出されるべくシャフトSを含む全ての対象物に対して、この回転位置センサを適用することができる。
復帰バネ50は、図2ないし図4に示すように、軸線L方向に所定量圧縮された状態で組み込まれると共に軸線L回りに回転付勢力を及ぼす捩りバネであり、その一端側がロータ40の円筒部41の周りにおいてハウジングカバー20のバネ受面25に着座されると共に一端部51がハウジングカバー20の掛止突起26に掛止され、その他端側がロータ40の環状位置決め部44の周りにおいてバネ受面43に着座されると共に他端部52がロータ40の掛止溝45に掛止されるようになっている。
すなわち、復帰バネ50は、ハウジング本体10にロータ40を組み込み、ロータ40の(円板部42の)バネ受面43に当接させかつ他端部52を掛止溝45に掛止させるようにして、ロータ40の円筒部41の周りに嵌め込み、その上方から一端部51を掛止突起26に掛止させるようにしてハウジングカバー20をハウジング本体10にスパップフィット結合することで、ロータ40及び復帰バネ50をハウジングに容易に組み込むことができる。
これにより、復帰バネ50は、ロータ40を所定の角度位置(初期位置)に復帰するように回転付勢力を及ぼすと共に、軸線L方向(スラスト方向)においてロータ40のガタツキを防止するように付勢力を及ぼすようになっている。
これにより、復帰バネ50は、ロータ40を所定の角度位置(初期位置)に復帰するように回転付勢力を及ぼすと共に、軸線L方向(スラスト方向)においてロータ40のガタツキを防止するように付勢力を及ぼすようになっている。
回路基板60は、図1、図2及び図5に示すように、略矩形状に形成され、その一部に位置決め孔61、その上面に実装された後述する固定センサ要素としての磁気感知素子72、その他の実装された電子部品(不図示)を備えている。
そして、回路基板60は、位置決め孔61にハウジング本体10の位置決め突起14が嵌め込まれると共に、その縁部がハウジング本体10の4つの挟持片13に挟み込まれて、収容凹部11内の所定位置に位置決めされて固定されるようになっている。
そして、回路基板60は、位置決め孔61にハウジング本体10の位置決め突起14が嵌め込まれると共に、その縁部がハウジング本体10の4つの挟持片13に挟み込まれて、収容凹部11内の所定位置に位置決めされて固定されるようになっている。
センサユニット70は、図4及び図5、図8に示すように、ロータ40に埋設された可動センサ要素としてのマグネット71、回路基板60に実装された固定センサ要素としての磁気感知素子72等により形成されている。
マグネット71は、図7に示すように、ロータ40の軸線Lが通る中央領域に埋設されており、図8に示すように、所定厚みをなす円板状に形成され、かつ、略半分がN極にかつ残りの略半分がS極に着磁されている。
磁気感知素子72は、図2、図5、図8に示すように、ハウジング本体10の軸線Lが通る中央領域に回路基板60を介して配置されており、マグネット71との相対的な角度変化(すなわち、磁界の変化)により抵抗値が変化するものである。すなわち、磁気感知素子72は、磁束の入射角の変化を感知して、ロータ40の角度位置を検出するようになっている。
このセンサユニット70においては、マグネット71と磁気感知素子72との相対的な位置関係において、軸線L方向のズレに対してはある程度の許容範囲があり(すなわち鈍感であり)、軸線Lに垂直な方向のずれ(中心ズレ)に対しては高精度に管理する必要がある(すなわち敏感である)。
マグネット71は、図7に示すように、ロータ40の軸線Lが通る中央領域に埋設されており、図8に示すように、所定厚みをなす円板状に形成され、かつ、略半分がN極にかつ残りの略半分がS極に着磁されている。
磁気感知素子72は、図2、図5、図8に示すように、ハウジング本体10の軸線Lが通る中央領域に回路基板60を介して配置されており、マグネット71との相対的な角度変化(すなわち、磁界の変化)により抵抗値が変化するものである。すなわち、磁気感知素子72は、磁束の入射角の変化を感知して、ロータ40の角度位置を検出するようになっている。
このセンサユニット70においては、マグネット71と磁気感知素子72との相対的な位置関係において、軸線L方向のズレに対してはある程度の許容範囲があり(すなわち鈍感であり)、軸線Lに垂直な方向のずれ(中心ズレ)に対しては高精度に管理する必要がある(すなわち敏感である)。
したがって、ロータ40に埋設されたマグネット71とハウジング本体10に固定された回路基板60上の磁気感知素子72とは、軸線Lに垂直な面内において高精度に位置決め(芯合わせ)される必要がある。
ここでは、ロータ40の環状当接面42aがハウジング本体10に含まれる環状軸受面32aに接触して軸線L回りに回動自在に支持され、環状当接面42a及び環状軸受面32aが軸線L上に頂点Pをもつ仮想円錐面C上に位置するため、ロータ40は、自動調芯作用により常に軸線L上に位置付けられるようになっている。したがって、摩耗等の軸受領域の経時的な変化を生じても、センサユニット70を構成するロータ40のマグネット71(可動センサ要素)とハウジング本体10の磁気感知素子72(固定センサ要素)との軸線Lに対する位置ずれを防止でき、ロータ40の回転角度位置を高精度に検出することができるようになっている。
ここでは、ロータ40の環状当接面42aがハウジング本体10に含まれる環状軸受面32aに接触して軸線L回りに回動自在に支持され、環状当接面42a及び環状軸受面32aが軸線L上に頂点Pをもつ仮想円錐面C上に位置するため、ロータ40は、自動調芯作用により常に軸線L上に位置付けられるようになっている。したがって、摩耗等の軸受領域の経時的な変化を生じても、センサユニット70を構成するロータ40のマグネット71(可動センサ要素)とハウジング本体10の磁気感知素子72(固定センサ要素)との軸線Lに対する位置ずれを防止でき、ロータ40の回転角度位置を高精度に検出することができるようになっている。
また、センサユニット70の可動センサ要素(マグネット71)及び固定センサ素子(磁気感知素子72)が、ロータ40の軸線Lが通る中央領域に配置されるため、すなわち、軸線Lを中心とした部品配置が可能になるため、構造の簡略化、小型化等を達成することができる。
さらに、センサユニット70の固定センサ要素(磁気感知素子72)が、ハウジング本体10に対して着脱自在な回路基板60に設けられているため、回路基板60をハウジング(ハウジング本体10)に嵌め込むだけで、センサユニト70の固定センサ要素(磁気感知素子72等)をハウジングに固定することができ、全体として組み立てを容易に行うことができる。
さらに、センサユニット70の固定センサ要素(磁気感知素子72)が、ハウジング本体10に対して着脱自在な回路基板60に設けられているため、回路基板60をハウジング(ハウジング本体10)に嵌め込むだけで、センサユニト70の固定センサ要素(磁気感知素子72等)をハウジングに固定することができ、全体として組み立てを容易に行うことができる。
尚、ここでは、センサユニット70として、マグネット71及び磁気感知素子72により構成される非接触式センサを示したが、これに限定されるものではなく、磁気感知素子72として磁気抵抗素子(MR)を採用した非接触式センサでもよく、又、可動センサ要素として可動接点及び固定センサ要素として配線端子を含み抵抗値の変化に応じて回転角度を検出する接触式センサ等を採用してもよい。
図9は、本発明に係る回転位置センサの他の実施形態を示す断面図であり、前述の図7に示す実施形態におけるガイド部材30の環状軸受面32aの形状を変更したものである。したがって、前述の実施形態と同一の構成については、同一の符号を付してその説明を省略する。
この実施形態において、ガイド部材30´は、図9に示すように、ハウジング本体10の嵌合部12に嵌合される連結部31、連結部31と一体的に形成されて環状軸受面32a´を画定する環状の軸受部32を備えている。
環状軸受面32a´は、図9に示すように、環状当接面42aに向けて凸状に湾曲した断面をなすように形成されている。
この実施形態において、ガイド部材30´は、図9に示すように、ハウジング本体10の嵌合部12に嵌合される連結部31、連結部31と一体的に形成されて環状軸受面32a´を画定する環状の軸受部32を備えている。
環状軸受面32a´は、図9に示すように、環状当接面42aに向けて凸状に湾曲した断面をなすように形成されている。
この実施形態においても、前述同様に、ロータ40は、その環状当接面42aがハウジング本体10に含まれる環状軸受面32a´に接触して、軸線L回りに回動自在に支持されており、環状当接面42a及び環状軸受面32a´が軸線L上に頂点Pをもつ仮想円錐面C上に位置するため、ロータ40は自動調芯作用により常に軸線L上に位置付けられるようになっている。したがって、摩耗等の軸受領域の経時的な変化を生じても、センサユニット70を構成するロータ40の可動センサ要素(マグネット71)とハウジングの固定センサ要素(磁気感知素子72)との軸線Lに対する位置ずれを防止でき、ロータ40の回転角度位置を高精度に検出することができる。
特に、環状軸受面32a´が凸状に湾曲した断面形状に形成されているため、ロータ40の自動調芯作用を確保しつつも、環状当接面42aと環状軸受面32a´との間の摺動抵抗を低減して、ロータ40をより円滑に回動させることができる。
特に、環状軸受面32a´が凸状に湾曲した断面形状に形成されているため、ロータ40の自動調芯作用を確保しつつも、環状当接面42aと環状軸受面32a´との間の摺動抵抗を低減して、ロータ40をより円滑に回動させることができる。
図10は、本発明に係る回転位置センサのさらに他の実施形態を示す断面図であり、前述の図7に示す実施形態におけるロータ40の円板部42の環状当接面42aの形状を変更したものである。したがって、前述の実施形態と同一の構成については、同一の符号を付してその説明を省略する。
この実施形態において、ロータ40´は、図10に示すように、円筒部41、円板部42、バネ受面43、環状位置決め部44、掛止溝45、当接片46等を備えている。
環状当接面42a´は、図10に示すように、ガイド部材30の環状軸受面32aに向けて凸状に湾曲した断面をなすように形成されている。
この実施形態において、ロータ40´は、図10に示すように、円筒部41、円板部42、バネ受面43、環状位置決め部44、掛止溝45、当接片46等を備えている。
環状当接面42a´は、図10に示すように、ガイド部材30の環状軸受面32aに向けて凸状に湾曲した断面をなすように形成されている。
この実施形態においても、前述同様に、ロータ40´は、環状当接面42a´がハウジング本体10に含まれる環状軸受面32aに接触して、軸線L回りに回動自在に支持されており、環状当接面42a´及び環状軸受面32aが軸線L上に頂点Pをもつ仮想円錐面C上に位置するため、ロータ40´は自動調芯作用により常に軸線L上に位置付けられるようになっている。したがって、摩耗等の軸受領域の経時的な変化を生じても、センサユニット70を構成するロータ40´の可動センサ要素(マグネット71)とハウジングの固定センサ要素(磁気感知素子72)との軸線Lに対する位置ずれを防止でき、ロータ40´の回転角度位置を高精度に検出することができる。
特に、環状当接面42a´が凸状に湾曲した断面形状に形成されているため、ロータ40´の自動調芯作用を確保しつつも、環状当接面42a´と環状軸受面32aとの間の摺動抵抗を低減して、ロータ40´をより円滑に回動させることができる。
特に、環状当接面42a´が凸状に湾曲した断面形状に形成されているため、ロータ40´の自動調芯作用を確保しつつも、環状当接面42a´と環状軸受面32aとの間の摺動抵抗を低減して、ロータ40´をより円滑に回動させることができる。
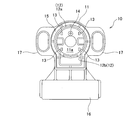
図11は、本発明に係る回転位置センサのさらに他の実施形態を示すものであり、前述の図8に示す実施形態におけるセンサユニット70のマグネット71の形状を変更したものである。したがって、前述の実施形態と同一の構成については、同一の符号を付してその説明を省略する。
この実施形態において、センサユニット70´は、図11に示すように、ロータ40に埋設された可動センサ要素としてのマグネット71´、回路基板60に実装された固定センサ要素としての磁気感知素子72等により形成されている。
マグネット71´は、図11に示すように、二分されたマグネット71a´,71b´により構成されて、ロータ40の軸線Lが通る中央領域に埋設されている。マグネット71a´,71b´は、図11に示すように、所定厚みをなす円弧状に形成され、かつ、周方向において略半分がN極にかつ残りの略半分がS極に着磁されている。
この実施形態において、センサユニット70´は、図11に示すように、ロータ40に埋設された可動センサ要素としてのマグネット71´、回路基板60に実装された固定センサ要素としての磁気感知素子72等により形成されている。
マグネット71´は、図11に示すように、二分されたマグネット71a´,71b´により構成されて、ロータ40の軸線Lが通る中央領域に埋設されている。マグネット71a´,71b´は、図11に示すように、所定厚みをなす円弧状に形成され、かつ、周方向において略半分がN極にかつ残りの略半分がS極に着磁されている。
この実施形態においても、前述同様に、センサユニット70´の可動センサ要素(マグネット71´)及び固定センサ素子(磁気感知素子72)が、ロータ40の軸線Lが通る中央領域に配置されるため、すなわち、軸線Lを中心とした部品配置が可能になるため、構造の簡略化、小型化等を達成することができる。
また、センサユニット70´の固定センサ要素(磁気感知素子72)が、ハウジング本体10に対して着脱自在な回路基板60に設けられているため、回路基板60をハウジング(ハウジング本体10)に嵌め込むだけで、センサユニト70´の固定センサ要素(磁気感知素子72等)をハウジングに固定することができ、全体として組み立てを容易に行うことができる。
また、センサユニット70´の固定センサ要素(磁気感知素子72)が、ハウジング本体10に対して着脱自在な回路基板60に設けられているため、回路基板60をハウジング(ハウジング本体10)に嵌め込むだけで、センサユニト70´の固定センサ要素(磁気感知素子72等)をハウジングに固定することができ、全体として組み立てを容易に行うことができる。
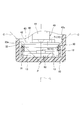
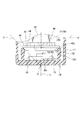
図12は、本発明に係る回転位置センサのさらに他の実施形態を示すものであり、前述の実施形態に対して、ガイド部材30,30´を廃止し、ハウジング本体10´に軸受部12´を一体的に形成したものである。尚、前述の実施形態と同一の構成については、同一の符号を付してその説明を省略する。
すなわち、この実施形態において、ハウジング本体10´は、収容凹部11a内に突出するように一体的に形成されて環状軸受面12a´を画定する環状の軸受部12´を備えている。
環状軸受面12a´は、ロータ40の環状当接面42aを回動自在に支持するべく、図12に示すように、軸線L上に頂点Pをもつ仮想円錐面Cの一部を画定するように、すなわち、円錐台の外周面を画定するテーパ面状に形成されている。
すなわち、この実施形態において、ハウジング本体10´は、収容凹部11a内に突出するように一体的に形成されて環状軸受面12a´を画定する環状の軸受部12´を備えている。
環状軸受面12a´は、ロータ40の環状当接面42aを回動自在に支持するべく、図12に示すように、軸線L上に頂点Pをもつ仮想円錐面Cの一部を画定するように、すなわち、円錐台の外周面を画定するテーパ面状に形成されている。
この実施形態においても、前述同様に、ロータ40は、その環状当接面42aがハウジング本体10´に含まれる環状軸受面12a´に接触して、軸線L回りに回動自在に支持されており、環状当接面42a及び環状軸受面12a´が軸線L上に頂点Pをもつ仮想円錐面C上に位置するため、ロータ40は自動調芯作用により常に軸線L上に位置付けられるようになっている。したがって、摩耗等の軸受領域の経時的な変化を生じても、センサユニット70を構成するロータ40の可動センサ要素(マグネット71)とハウジングの固定センサ要素(磁気感知素子72)との軸線Lに対する位置ずれを防止でき、ロータ40の回転角度位置を高精度に検出することができる。
特に、軸受部12´がハウジング本体10´に一体的に形成されているため、ハウジング本体10´部品点数を削減することができ、構造を簡素化することができる。
特に、軸受部12´がハウジング本体10´に一体的に形成されているため、ハウジング本体10´部品点数を削減することができ、構造を簡素化することができる。
上記実施形態においては、回転体として、ハウジング(ハウジング本体10及びハウジングカバー20)内に収容されるロータ40を示したが、これに限定されるものではなく、ハウジングの外部から内部に直接挿入されるシャフトSであってもよい。
上記実施形態においては、回転位置センサを適用する対象物として、スロットル装置SMを示したが、これに限定されるものではなく、アクセルペダルの踏込み開度を検出するべくアクセルペダル装置に適用されてもよく、あるいは、その他の回転角度を検出する必要のある装置等に適用されてもよい。
上記実施形態においては、ハウジングとして、ハウジング本体10とハウジングカバー20に二分されたものを示したが、これに限定されるものではなく、ロータ40、復帰バネ50等の組付けが可能である限り、一体型のハウジングを採用してもよい。
上記実施形態においては、復帰バネ50として、捩りバネを示したが、これに限定されるものではなく、ロータ40を軸線L回りに回転付勢すると共に軸線L方向に付勢する作用を及ぼすものであれば、その他のバネを採用してもよい。
上記実施形態においては、復帰バネ50を含む場合を示したが、これに限定されるものではなく、回転位置センサから復帰バネ50を廃止して外部の対象物側に設けた構成において、本発明を採用してもよい。
上記実施形態においては、回転位置センサを適用する対象物として、スロットル装置SMを示したが、これに限定されるものではなく、アクセルペダルの踏込み開度を検出するべくアクセルペダル装置に適用されてもよく、あるいは、その他の回転角度を検出する必要のある装置等に適用されてもよい。
上記実施形態においては、ハウジングとして、ハウジング本体10とハウジングカバー20に二分されたものを示したが、これに限定されるものではなく、ロータ40、復帰バネ50等の組付けが可能である限り、一体型のハウジングを採用してもよい。
上記実施形態においては、復帰バネ50として、捩りバネを示したが、これに限定されるものではなく、ロータ40を軸線L回りに回転付勢すると共に軸線L方向に付勢する作用を及ぼすものであれば、その他のバネを採用してもよい。
上記実施形態においては、復帰バネ50を含む場合を示したが、これに限定されるものではなく、回転位置センサから復帰バネ50を廃止して外部の対象物側に設けた構成において、本発明を採用してもよい。
以上述べたように、本発明の回転位置センサは、回転位置が検出されるロータあるいはシャフト等の回転体を、その軸受領域の摩耗等による経時的な変化を生じても、自動的に調芯作用が得られるように支持することができ、又、構造の簡素化、小型化等を達成することができるため、回転体の回転角度位置を高精度に検出する必要のある対象物であれば、エンジンに関連する装置に限らず、その他の機械関連の装置に、あるいは、電気関連の装置においても有用である。
Claims (8)
- 軸受部を有するハウジングと、
前記軸受部により所定の軸線回りに回動自在に支持される回転体と、
前記回転体の回転角度位置を検出するべく前記回転体に設けられた可動センサ要素及び前記ハウジングに設けられた固定センサ要素を含むセンサユニットと、を備え、
前記回転体は、前記軸線を中心とする環状当接面を有し、
前記軸受部は、前記軸線を中心としかつ前記環状当接面を受ける環状軸受面を有し、
前記環状当接面及び環状軸受面の少なくとも一方は、前記軸線上に頂点をもつ仮想円錐面の一部を画定する環状テーパ面に形成されている、
回転位置センサ。 - 前記ハウジングは、別個に形成されたガイド部材を含み、
前記ガイド部材は、前記環状軸受面を有する、
ことを特徴とする請求の範囲第1項に記載の回転位置センサ。 - 前記環状軸受面は、前記環状当接面に向けて凸状に湾曲した断面をなすように形成されている、
ことを特徴とする請求の範囲第1項に記載の回転位置センサ。 - 前記回転体は、前記ハウジングの外部に配置されて回転角度を検出されるシャフトを連結する連結穴を有する、
ことを特徴とする請求の範囲第1項に記載の回転位置センサ。 - 前記回転体は、前記軸線を中心とする円筒部と、前記円筒部の一端側に一体的に形成されて前記環状当接面を画定する円板部とを有し、
前記ハウジングは、前記環状軸受面を含むハウジング本体と、前記ハウジング本体に対して着脱自在に形成されると共に前記円筒部を回動自在に支持する円筒軸受面を含むハウジングカバーと有する、
ことを特徴とする請求の範囲第1項に記載の回転位置センサ。 - 前記ハウジングには、前記回転体を所定の角度位置に復帰させる復帰バネが配置され、
前記復帰バネは、前記円筒部の周りでかつ前記円板部と前記ハウジングカバーの間に配置され、前記軸線方向に付勢力を及ぼすと共に前記軸線回りに付勢力を及ぼす捩りバネである、
ことを特徴とする請求の範囲第5項に記載の回転位置センサ。 - 前記ハウジングカバーは、前記ハウジング本体に対して、スナップフィット結合されるように形成されている、
ことを特徴とする請求の範囲第5項に記載の回転位置センサ。 - 前記センサユニットの可動センサ要素は、円板状に形成されたマグネットを含み、
前記マグネットは、前記回転体の前記軸線が通る中央領域に埋設され、
前記センサユニットの固定センサ要素は、前記マグネットから発せられる磁力線を通すと共に磁束密度の変化を感知し得る磁気感知素子を含み、
前記磁気感知素子は、前記ハウジングの前記軸線が通る中央領域に配置されている、
ことを特徴とする請求の範囲第1項に記載の回転位置センサ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN200980110810XA CN101981414B (zh) | 2008-03-31 | 2009-02-10 | 旋转位置传感器 |
| EP09728745.2A EP2264408A4 (en) | 2008-03-31 | 2009-02-10 | ROTATABLE POSITION SENSOR |
| US12/923,615 US8400144B2 (en) | 2008-03-31 | 2010-09-29 | Rotational position sensor having axially central sensor unit |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008-089905 | 2008-03-31 | ||
| JP2008089905A JP5301864B2 (ja) | 2008-03-31 | 2008-03-31 | 回転位置センサ |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US12/923,615 Continuation US8400144B2 (en) | 2008-03-31 | 2010-09-29 | Rotational position sensor having axially central sensor unit |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2009122775A1 true WO2009122775A1 (ja) | 2009-10-08 |
Family
ID=41135174
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/052188 WO2009122775A1 (ja) | 2008-03-31 | 2009-02-10 | 回転位置センサ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8400144B2 (ja) |
| EP (1) | EP2264408A4 (ja) |
| JP (1) | JP5301864B2 (ja) |
| CN (1) | CN101981414B (ja) |
| WO (1) | WO2009122775A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114216393A (zh) * | 2022-02-21 | 2022-03-22 | 泉州昆泰芯微电子科技有限公司 | 旋转角度检测装置、旋钮、学习用具及娱乐用具 |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5384267B2 (ja) * | 2009-09-16 | 2014-01-08 | 株式会社ミクニ | 回転角検出装置 |
| US9188462B2 (en) | 2010-06-30 | 2015-11-17 | Ntn Corporation | Rotation sensor-equipped bearing |
| JP5484221B2 (ja) * | 2010-06-30 | 2014-05-07 | Ntn株式会社 | 回転検出機能付き滑り軸受装置 |
| JP5535018B2 (ja) * | 2010-09-17 | 2014-07-02 | Ntn株式会社 | 回転センサ付軸受 |
| US8390276B2 (en) * | 2010-09-27 | 2013-03-05 | Bourns Incorporated | Target magnet assembly for a sensor used with a steering gear |
| DE102011002254A1 (de) * | 2011-04-22 | 2012-10-25 | Schaeffler Technologies AG & Co. KG | Positionsgeber insbesondere zur Bestimmung der Position eines Läufers eines planaren Direktantriebs |
| DE102011081637A1 (de) * | 2011-08-26 | 2013-02-28 | Zf Friedrichshafen Ag | Führungsabschnitt eines Gehäuses für einen Sensor, Gehäuse für einen Sensor sowie Sensor, insbesondere für ein Fahrzeuggetriebe und Verfahren zum Herstellen eines Gehäuses für einen Sensor, insbesondere für ein Fahrzeuggetriebe |
| US10365953B2 (en) * | 2012-05-01 | 2019-07-30 | Red Hat, Inc. | Tracking and utilizing facts about a node of a multi-tenant cloud hosting environment |
| DE102012105969A1 (de) * | 2012-07-04 | 2014-01-09 | Hella Kgaa Hueck & Co. | Drehwinkelsensor |
| CN102881065B (zh) * | 2012-10-10 | 2015-04-08 | 红门智能科技股份有限公司 | 转动式车辆出入管理装置 |
| JP6190157B2 (ja) * | 2013-05-16 | 2017-08-30 | アズビル株式会社 | 回転角度検出器 |
| JP5987877B2 (ja) * | 2013-10-04 | 2016-09-07 | 株式会社デンソー | 電子スロットル |
| JP6584424B2 (ja) * | 2014-03-26 | 2019-10-02 | シェフラー テクノロジーズ アー・ゲー ウント コー. カー・ゲーSchaeffler Technologies AG & Co. KG | センサ磁石アッセンブリ |
| KR102221836B1 (ko) * | 2014-08-13 | 2021-03-03 | 현대모비스 주식회사 | 차량용 램프 |
| GB2535556B (en) | 2015-07-14 | 2017-06-28 | Longvale Ltd | Electrical Process Control Sensor Assemblies |
| CN105532177B (zh) * | 2016-02-22 | 2017-12-26 | 农业部南京农业机械化研究所 | 一种纵轴流收割机滚筒转速检测装置 |
| CN107796298B (zh) * | 2016-09-05 | 2024-04-19 | 泰科电子(上海)有限公司 | 角度传感器 |
| JP6741611B2 (ja) * | 2017-02-20 | 2020-08-19 | 株式会社不二工機 | 電動弁 |
| DE102017117759A1 (de) * | 2017-08-04 | 2019-02-07 | Mimatic Gmbh | Sensornachrüstsatz |
| JP6913625B2 (ja) * | 2017-12-22 | 2021-08-04 | 三菱重工コンプレッサ株式会社 | ジャーナル軸受、回転機械、及びジャーナル軸受製造方法 |
| DE102019106288B3 (de) * | 2019-03-12 | 2020-03-05 | Sick Stegmann Gmbh | Drehgeber |
| DE102020100319A1 (de) * | 2020-01-09 | 2021-07-15 | HELLA GmbH & Co. KGaA | Drehwinkelsensor zur Bestimmung eines Drehwinkels und/oder eines Drehmoments |
| US20230258519A1 (en) * | 2022-02-14 | 2023-08-17 | KSR IP Holdings, LLC | Pedal assembly having force sensing |
| DE102022103731A1 (de) * | 2022-02-17 | 2023-08-17 | HELLA GmbH & Co. KGaA | Drehwinkelsensoreinheit, Deckel für ein Gehäuse einer Drehwinkelsensoreinheit und Verfahren zum Herstellen einer Drehwinkelsensoreinheit |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6423114A (en) * | 1987-07-20 | 1989-01-25 | Agency Ind Science Techn | Magnetic rotary sensor |
| JPH04115120A (ja) * | 1990-09-05 | 1992-04-16 | Alps Electric Co Ltd | 磁気式ロータリエンコーダの組立方法 |
| JPH11201713A (ja) * | 1998-01-16 | 1999-07-30 | Unisia Jecs Corp | 回動角検出装置 |
| JP2000107288A (ja) * | 1998-10-05 | 2000-04-18 | Terumo Corp | シリンジポンプ |
| JP2001124508A (ja) | 1999-10-22 | 2001-05-11 | Aisan Ind Co Ltd | ロータリポジションセンサ |
| JP2002250343A (ja) * | 2001-02-21 | 2002-09-06 | Minebea Co Ltd | 特殊軸受装置 |
| JP2003269992A (ja) * | 2002-03-12 | 2003-09-25 | Alps Electric Co Ltd | ロータリポジションセンサ |
| JP2004150905A (ja) | 2002-10-30 | 2004-05-27 | Hitachi Ltd | 非接触式回転位置センサ及び非接触式回転位置センサを有する電子制御スロットル弁装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3587695B2 (ja) * | 1998-09-08 | 2004-11-10 | アルプス電気株式会社 | 回転型センサ |
| US6445178B1 (en) * | 1999-02-24 | 2002-09-03 | Donnelly Corporation | Vehicular magnetic displacement sensor for determining an offset in the output of the sensor |
| JP4174222B2 (ja) * | 2002-03-07 | 2008-10-29 | アルプス電気株式会社 | 回転型センサ |
| JP4039665B2 (ja) * | 2002-10-04 | 2008-01-30 | タカラベルモント株式会社 | エステ機器における施術器具ホルダー装置 |
| JP4524099B2 (ja) * | 2003-12-19 | 2010-08-11 | オリンパス株式会社 | 内視鏡装置 |
| JP2009180499A (ja) * | 2006-03-17 | 2009-08-13 | Murata Mfg Co Ltd | 角度検出装置 |
-
2008
- 2008-03-31 JP JP2008089905A patent/JP5301864B2/ja not_active Expired - Fee Related
-
2009
- 2009-02-10 CN CN200980110810XA patent/CN101981414B/zh not_active Expired - Fee Related
- 2009-02-10 EP EP09728745.2A patent/EP2264408A4/en not_active Withdrawn
- 2009-02-10 WO PCT/JP2009/052188 patent/WO2009122775A1/ja active Application Filing
-
2010
- 2010-09-29 US US12/923,615 patent/US8400144B2/en not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6423114A (en) * | 1987-07-20 | 1989-01-25 | Agency Ind Science Techn | Magnetic rotary sensor |
| JPH04115120A (ja) * | 1990-09-05 | 1992-04-16 | Alps Electric Co Ltd | 磁気式ロータリエンコーダの組立方法 |
| JPH11201713A (ja) * | 1998-01-16 | 1999-07-30 | Unisia Jecs Corp | 回動角検出装置 |
| JP2000107288A (ja) * | 1998-10-05 | 2000-04-18 | Terumo Corp | シリンジポンプ |
| JP2001124508A (ja) | 1999-10-22 | 2001-05-11 | Aisan Ind Co Ltd | ロータリポジションセンサ |
| JP2002250343A (ja) * | 2001-02-21 | 2002-09-06 | Minebea Co Ltd | 特殊軸受装置 |
| JP2003269992A (ja) * | 2002-03-12 | 2003-09-25 | Alps Electric Co Ltd | ロータリポジションセンサ |
| JP2004150905A (ja) | 2002-10-30 | 2004-05-27 | Hitachi Ltd | 非接触式回転位置センサ及び非接触式回転位置センサを有する電子制御スロットル弁装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2264408A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114216393A (zh) * | 2022-02-21 | 2022-03-22 | 泉州昆泰芯微电子科技有限公司 | 旋转角度检测装置、旋钮、学习用具及娱乐用具 |
| CN114216393B (zh) * | 2022-02-21 | 2022-05-17 | 泉州昆泰芯微电子科技有限公司 | 旋转角度检测装置、旋钮、学习用具及娱乐用具 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5301864B2 (ja) | 2013-09-25 |
| EP2264408A4 (en) | 2014-09-17 |
| CN101981414A (zh) | 2011-02-23 |
| CN101981414B (zh) | 2012-08-08 |
| JP2009244039A (ja) | 2009-10-22 |
| US20110018529A1 (en) | 2011-01-27 |
| EP2264408A1 (en) | 2010-12-22 |
| US8400144B2 (en) | 2013-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5301864B2 (ja) | 回転位置センサ | |
| WO2012063599A1 (ja) | 非接触式角度センサ | |
| JP2013190337A (ja) | 回転角度検出装置 | |
| JP2009229395A (ja) | 回転センサユニット | |
| JP3496581B2 (ja) | 回転角検出装置 | |
| US6836111B2 (en) | Sensor assembly with a universal sensor module for sensing angular position of an object | |
| JP2024026598A (ja) | アブソリュートエンコーダ | |
| EP1850094A2 (en) | Rotation sensor | |
| JP5400571B2 (ja) | 回転シャフトに組み立てるための角度位置センサ | |
| JP2005345170A (ja) | 回転角度検出装置 | |
| JP2008267966A (ja) | マグネットユニット及びアクセルペダル装置 | |
| JP5192926B2 (ja) | 回転角検出装置 | |
| JP2001133212A (ja) | 非接触式回転角センサ及びセンサコア | |
| US11578994B2 (en) | Fixing structure | |
| US8497675B2 (en) | Angle detector | |
| JP2013244842A (ja) | アクセルペダル装置 | |
| JP2007085743A (ja) | 非接触回転変位センサ | |
| JP2001141412A (ja) | 非接触式回転角センサ及びセンサコア | |
| JP2002286497A (ja) | 変位センサ | |
| JP2023154041A (ja) | 回転角度検出装置 | |
| JP6451252B2 (ja) | 回転角検出装置 | |
| JP2004155377A (ja) | アクセルペダル装置 | |
| JP2004155374A (ja) | アクセルペダル装置 | |
| JP2013076715A (ja) | 被読取板固定用部材、被読取板固定用組立体、及び信号検出装置、並びにロータリーエンコーダ | |
| JP2003139228A (ja) | 自動変速機のポジションセンサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 200980110810.X Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09728745 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2009728745 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2009728745 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |