KR920000835B1 - Pwm 펄스발생장치 - Google Patents
Pwm 펄스발생장치 Download PDFInfo
- Publication number
- KR920000835B1 KR920000835B1 KR1019840000408A KR840000408A KR920000835B1 KR 920000835 B1 KR920000835 B1 KR 920000835B1 KR 1019840000408 A KR1019840000408 A KR 1019840000408A KR 840000408 A KR840000408 A KR 840000408A KR 920000835 B1 KR920000835 B1 KR 920000835B1
- Authority
- KR
- South Korea
- Prior art keywords
- signal
- wave
- command
- carrier
- frequency
- Prior art date
Links
- 238000001514 detection method Methods 0.000 claims description 10
- 239000000969 carrier Substances 0.000 claims 1
- 230000006698 induction Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 230000005284 excitation Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- NCGICGYLBXGBGN-UHFFFAOYSA-N 3-morpholin-4-yl-1-oxa-3-azonia-2-azanidacyclopent-3-en-5-imine;hydrochloride Chemical compound Cl.[N-]1OC(=N)C=[N+]1N1CCOCC1 NCGICGYLBXGBGN-UHFFFAOYSA-N 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K7/00—Modulating pulses with a continuously-variable modulating signal
- H03K7/08—Duration or width modulation ; Duty cycle modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/505—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a thyratron or thyristor type requiring extinguishing means
- H02M7/515—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a thyratron or thyristor type requiring extinguishing means using semiconductor devices only
- H02M7/525—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a thyratron or thyristor type requiring extinguishing means using semiconductor devices only with automatic control of output waveform or frequency
- H02M7/527—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a thyratron or thyristor type requiring extinguishing means using semiconductor devices only with automatic control of output waveform or frequency by pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/06—Rotor flux based control involving the use of rotor position or rotor speed sensors
- H02P21/08—Indirect field-oriented control; Rotor flux feed-forward control
- H02P21/09—Field phase angle calculation based on rotor voltage equation by adding slip frequency and speed proportional frequency
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Inverter Devices (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Stepping Motors (AREA)
Abstract
내용 없음.
Description
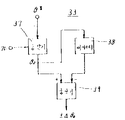
제1도는 본원 발명의 일실시예를 나타낸 구성도.
제2도는 펄스발생회로의 일예를 나타낸 상세구성도.
제3도는 위상변화검출회로의 일예의 구성도.
제4도는 주파수비설정회로의 특성도.
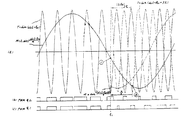
제5도~제7도는 본원 발명의 동작 설명을 위한 파형도.
제8도는 본원 발명을 마이크로프로세서로 실행할 경우의 플로차트.
* 도면의 주요부분에 대한 부호의 설명
2 : PWM 인버터 3 : 유도전동기
6 : 속도제어회로 12, 13 : 전류제어회로
14 : 전압연산회로 15 : 펄스발생회로
본원 발명은 PWM(pulse width modulation) 인버터를 제어하는데 사용되는 PWM 펄스를 발생하는 PWM 펄스발생장치에 관한 것이다.
PWM 인버터는 유도전동기를 가변속제어하는데에 많이 이용되고 있다. PWM 인버터는 정현파(正弦波)전압지령신호(變調波)와 3각파신호(搬送波)를 비교하여 얻어지는 펄스폭변조펄스(PWM펄스)에 의해 점호(点弧)제어된다. 정현파전압지령신호의 진폭과 주파수는 PWM 인버터의 출력전압의 기본파성분이 유도전 동기가 요구하는 진폭과 주파수가 되도록 결정된다.
그런데, 근래 유도전동기의 1차전류를 차속축(磋束軸)과 동일방향성분(여자전류성분)과 그것에 직교하는 성분(토크전류성분)으로 분해하고, 각각을 별개로 제어하는 이른바 벡터제어방법이 주목되어 이미 실용에 이용되고 있다. 벡터제어방법을 채택하면, 유도전동기에 있어서도 직류전동기와 마찬가지고 고정밀도의 토크제어를 할 수 있다. 벡트제어방법에 대해서는 예를 들면 미합중국 특허 제3,824,437호 명세서(대웅 일본국 특공소 50-34725호 공보)나 일본국 특개소 51-11125호 공보 등에 기재되어 있다.
벡터제어방법은 1차전류의 진폭, 주파수외에 위상을 순간에 변화시킨다. PWM 인버터에서 유도전동기를 구동하는 것에 벡터제어방법을 채용할 경우에는 변조파의 진폭, 주파수 및 위상을 변화시키게 된다. 한편, 반송파는 변조파의 1주기마다 동기하도록 제어된다. 따라서, 변조파의 위상이 변화해도 반송파는 1주기 종료까지 변화하지 않으므로, PWM 펄스는 PWM 인버터의 출력전압(기본파성분)이 정현파로 되지 않는 파형으로 된다. 그러므로, 벡터제어를 정밀도 높게 할 수 없다고 하는 문제점을 갖는다.
또, 벡터제어를 마이크로프로세서등을 사용하여 디지탈제어화하는 것이 고려되고 있으나, 반송파가 3각파이면 변곡점을 가져 불연속으로 되므로 소프트처리가 곤란하다고 하는 문제점도 있다.
본원 발명의 목적은 변조파의 위상급변이 있더라도 PWM 인버터의 출력전압을 정현파로 하는 PWM 펄스를 발생하기 위한 PWM 펄스발생장치를 제공하는데 있다.
본원 발명의 특징은 정현파가 진폭의 ±86% 정도의 사이에서는 직선근사일 수 있으며, 진폭이 정현파의 진폭의 약 1.2배의 3각파와 대략 같은 것에 착안하여, 반송파로서 정현파신호를 사용하도록 한 것에 있다.
제1도에 본원 발명의 일실시예를 나타낸다.
제1도에 있어서 유도전동기(3)는 PWM 인버터(2)에 의해 구동된다. PWM 인버터(2)에는 교류전원(1)으로부터 가해지는 교류전압을 직류전압으로 정류(整流)하는 정류기를 포함하고 있는 것으로서 도시되어 있다. PWM 인버터(2)의 출력전류는 전류검출기(10)에 의해 검출된다. 유도전동기(3)에는 속도검출기(4)가 기계적으로 직결되어 있다. 속도설정회로(5)의 속도지령신호 N*와 속도검출기(4)의 속도검출신호 N는 속도제어회로(6)에 도시한 극성(極性)으로 가해진다. 속도제어회로(6)는 속도편차에 따라서 유도전동기(3)의 자속축과 직교하는 토크전류지령신호 It*를 출력하며, 슬립주파수연산회로(7)와 제2전류제어회로(13)에 가한다. 슬립주파수연산회로(7)는 토크전류지령신호 Im*와 여자전류지령신호(11)로부터 부여되는 여자전류지령신호 Im*에 의해 슬립주파수지령신호 ws*를 구하여 가산기(8)에 가한다. 가산기(8)는 슬립주파수지령치 ws*와 속도검출치 N(회전주파수 wT에 비례)를 가산하는 것으로서, 그 출력은 유도전동기(3)의 1차주파수 지령신호로 된다. 각주파수(角周波數)연산회로(9)는 가산기(8)의 출력인 1차주파수지령신호를 입력하여 1차 각주파수지령신호 w1*를 구하여 펄스발생회로(15)에 가한다.
전류성분연산회로(17)는 전류검출기(10)에서 검출한 1차전류검출신호 i를 입력하여, 자속축위치와 동일방향의 전류성분은 여자전류 Im와, 직교하는 성분의 토크전류 It를 직류신호로서 검출한다. 전류성분연산회로(17)로서는 예를 들어 일본국 특개소 57-199489호 공보의 제4도에 개시되어 있는 것이 사용된다. 제1전류제어회로(12)는 여자전류지령치 Im*와 실체치 Im의 편차에 따라 동작하며, 그 출력은 유도전동기(3)의 1차 상전압(相電壓)의 차속축과 동일방향성분의 전압지령치 Vm*로 된다. 제2전류제어회로(13)는 토크전류지령치 It*와 실제치 It의 편차에 따라 동작하며, 그 출력은 1차상전압의 차속축과 직교하는 성분의 전압지령치 Vt*로 된다. 두 전압지령치 Vm*, Vt*는 전압연산회로(14)에 입력된다. 전압연산회로(14)는 신호 Vm*, Vt*에 의거하여 1차전압(변조파)의 진폭지령신호 A*와 위상지령신호 θ*를 구하고, 직류신호로서 펄스발생회로(15)에 가한다. 펄스발생회로(15)에는 발진기(16)로부터 클록펄스 Pc도 가해져 있다.
제2도에 펄스발생회로(15)의 일예의 구성도를 나타낸다.
제2도에 있어서, 주파수비설정회로(30)는 1차각주파수지령치 w1*를 입력하고, 제4도에 나타낸 바와 같은 특성으로 주파수비신호 n를 출력한다. 주파수비치 n는 PWM 인버터(2)의 스위칭주파수가 허용되는 최대스위칭주파수에 의해 결정된다. 정역전(正逆轉)지령회로(31)는 1차각주파수지령치 w1*의 극성이 플러스일 때 정전(正轉)신호 F를 출력하며, 마이너스일 때 역전(逆轉)신호 R를 출력하여 업·다운카운터(20)에 가한다. 카운터(20)는 발진기(16)의 클록펄스 Pc를 입력하여, 정전신호 F가 가해지고 있을 때에는 업방향으로 계수하며, 역으로 역전신호 R가 가해지고 있을 때에는 다운방향으로 계수한다. 승산기(32)는 1차각주파수지령치 w1*와 주파수비치 n를 승산하여 반송파의 각주파수 w0를 구하여 승산기(21)에 가한다. 승산기(21)는 카운터(20)의 카운트치 t와 반송파각주파수 w0를 승산한다. 반송파위상변화검출회로(33)는 위상지령치 θ*와 주파수비치 n를 입력하여, 반송파의 위상변화치 Δθ0를 구한다. 위상변화검출회로(33)는 제3도와 같이 구성되어 있다. 전압연산회로(14)가 출력하는 변조파의 위상지령신호 θ*와 주파수비 n를 승산기(37)로 승산하고, 변조파의 위상지령치 위상지령치 θ*에 대응하는 반송파의 위상 θ0을 구한다. 승산기(37)에서 구한 반송파 위상 θ0을 레지스터(38)에 기억해 두고, 승산기(37)에서 구한 위상 θ0과 레지스터(38)의 기억치를 감산기(39)에서 도시한 극성으로 감산한다. 감산기(39)는 변조파위상지령치 θ*의 변화에 의해 반송파위상 θ0이 변화하면 반송파위상변화량 ±Δθ0을 출력한다. 반송파위상변화량 ±Δθ0이 플러스극성일 경우는 변화전의 위상보다 나아간 위상으로 한다.
제2도로 되돌아가서, 가산기(23)는 반송파위상변화량 Δθ0과 레지스터(24)에 기억되어 있는 변화전의 반송파위상을 가산하여, 반송파위상신호 θ0로서 가산기(22)에 가한다. 가산기(22)의 가산치(w0t+θ0)는 정현파변환회로(27)에 입력되며, 정현파반송신호 sin(w0t+θ0)로 변환된다. 정현파변환회로(27)가 출력하는 정현파반송신호는 비교기(29)에 가해진다. 한편, 승산기(25)는 주파수비 n의 역수 1/n를 역수회로(34)로부터 입력하여, 가산기(22)의 가산치(w0t+θ0)에 승산한다. 승산기(25)의 출력신호 1/n(w0t+θ0)는 정현파변환회로(26)에 입력되며, 정현파신호 sin1/n(w0t+θ0)=sin(w1t+θ1)로 변환된다. 승산기(28)는 정현파변환회로(26)의 정현파신호에 진폭지령신호 A*를 승산하여, 정현파변조신호 A*sin(w1t+θ1)로서 비교기(29)에 가한다. 비교기(29)는 정현파변조신호와 정현파반송신호를 비교하여, 변조신호≥반송신호일 때 “1”레벨이 되는 PWM 펄스를 발생한다.
다음에, 동작에 대해서 설명한다.
각주파수연산회로(9)와 전압연산회로(14)가 다음식의 관계에 따라 1차각주파수지령신호 w1*또는 진폭지령신호 A*와 위상지령신호 θ*를 구하기 까지의 동작은 잘 알려져 있으므로, 설명을 생략한다.

1차각주파수지령신호 w1*는 예를 들어 유도전동기(3)가 정전하고 있을 때 속도검출기(4)의 검출치와 슬립주파수연산회로(7)의 지령치 ws*가 모두 플러스이며, 그 극성이 플러스로 된다. 역전으로 되면 속도지령신호 N*를 마이너스극성으로 하므로, 신호 w1*의 극성은 마이너스로 된다.
펄스발생회로(15)는 신호 w1*, A*, θ*와 발진기(16)가 발생하는 클록펄스 Pc를 입력하여 다음과 같은 동작을 행한다.
업·다운카운터(20)는 클록펄스 Pc를 계수한다. 정전신호 F가 주어지고 있을 때에는 0에서 최대치의 업방향으로 계수하고, 최대치가 되면 오버플로하여 0으로 리세트되어 재차 업방향으로의 계수를 반복하여 행한다. 또, 역전신호 F가 주어지고 있을 때에는 최대치에서 0의 다운방향으로 계수하며, 0이 되면 최대치가 세트되어 재차 다운방향으로의 계수를 반복하여 행한다. 지금, 위상지령신호 θ*가 소정치 θ1로 운전하고 있는 안정상태에 있는 것으로 한다. 이 경우, 위상변화검출회로(33)의 위상변화량 Δθ0은 0으로 되며, 가산기(22)에는 변조파위상 θ1에 대응하는 반송파위상신호 θ1가 가해진다. 이 경우에 정현파변환회로(27)로부터 얻어지는 정현파반송신호 T와 승산기(28)로부터 얻어지는 정현파변조신호 M는 다음식과 같이 나타낼 수 있다.

반송파 T와 변조파 M가 (4),(5)식의 관계에 있을 때, 변조파 M가 제5a도에 실선으로 나타낸 것처럼 진폭 A1의 경우, 비교기(29)로부터는 제5b도에 나타낸 것과 같은 파형의 PWM 펄스가 얻어진다. 마찬가지로, 변조파 M의 진폭이 제5a도에 점선으로 나타낸 것처럼 A2이면, 제5c도에 나타낸 파형의 PWM 펄스가 얻어진다.
다음에, 반송파 T와 변조파 M의 관계가 (4),(5)식의 관계이며, PWM 펄스를 발생하고 있을 때에 제6a도에 나타낸 시각 t1에서 변조파(A점)의 위상지령신호 θ*가 π/3만큼 나아간 위상으로 되었다고 한다. 이 경우에 있어서의 주파수비설정회로(30)가 설정하는 주파수비 n가 9라고 하면, 위상변화검출회로(33)로부터 얻어지는 반송파위상변화량 Δθ0은 3π로 된다. 따라서, 가산기(22)의 가산치는 w0t+θ1+3π로 된다. 이 경우, 진폭지령신호 A*는 A1이라고 하면, 정현파변환회로(27)로부터 얻어지는 반송파 T와 승산기 (28)에서 얻어지는 변조파 M는 다음식과 같이 된다.

반송파 T와 변조파 M가 (6),(7)식의 관계로 되는 것은 시각 t1에서 B점 이후의 변조파 M와 반송파 T의 관계에서 PWM 펄스를 발생한다. 제6b도는 변조파 M의 위상이 변화하지 않을 경우의 PWM 펄스의 파형을 나타내며, 제6c도에 변조파 M의 위상이 변화했을 경우에 본원 발명에 의해 얻어지는 PWM펄스의 파형을 나타낸다. 제6b,c도를 비교하면 명백한 것과 같이, 제6c도의 시각 t1이후의 파형은 제6b도의 B점 이후의 파형과 같도록 되어 있다.
제7도는 정역전지령회로(31)가 역전신호 R를 발생했을 경우의 파형도를 나타낸다.
지금, 반송파 T와 변조파 M가 다음식의 관계로 PWM 펄스를 발생하고 있을 때, 제7d도에 나타낸 것처럼 시각 t2에 정역전지령회로(31)가 역전신호 R를 발생했다고 한다.

업·다운카운터(20)는 역전신호 R가 가해지면 클록펄스 Pc를 다운방향으로 계수한다. 그러므로, 반송파 신호 T와 변조파신호 M는 시각 t2에서 제7a도에 점선으로 나타낸 것처럼 역위상시간에서 변화한다. 이와 같은 것은 전동기(3)의 좌속축의 변화에 추종해서 변화하는 것을 의미하며, 정전과 역전의 전환을 원활히 할 수 있게 된다. 정전에서 역전으로 전환했을 경우의 PWM 펄스는 제7c도와 같은 파형으로 된다. 그리고, 시각 t2에서 역전지령 R을 부여하지 않고 정전상태를 계속한 경우의 PWM 펄스의 파형을 제7b도에 참고로 도시했다.
이상과 같이해서 PWM인버터의 점호제어를 행하는 PWM 펄스를 발생하는 것이나, 반송파로서 정현파 신호를 사용하여 변조파의 위상변화에 추종해서 반송파의 위상을 변화시키고 있다. 그러므로, 변조파의 위상급변이 있더라도 PWM 인버터의 출력전압(기본파성분)을 정현파로 하는 PWM 펄스를 발생할 수 있다. 따라서, 벡터제어를 정밀도높게 할 수 있게 된다.
다음에, 본원 발명은 마이크로프로세서 등을 사용하여 소프트처리에 의해서도 실현할 수 있다.
제8도에 소프트처리로 할 경우의 플로차트를 나타낸다.
먼저, 신호 A*, θ*, w1*를 입력하여 w0, n, Δθ0, F/R을 연산한다. 다음에, 위상 θ0을 앞의 θ1와 Δθ1와의 가산으로 구하고, w0와 t를 승산하여 그 값 wt에 θ를 가산하여 X1을 구한다. 다음에, X1과 1/n을 승산하여 X2를 구한다. X1및 X2에서 y1=AsinX2와 y2=sinX1을 구하여 양자를 비교하며, y1≥y2일 때 출력을 “1”레벨로 하고, y1〈y2일 때 “0”레벨로 한다. 다음에, F/R의 값에 의해, 즉 정전지령 F일 때는 t=t+1, 역전지령 R일 때는 t=t-1으로 하고, 개시로 귀환함으로써 제1도의 실시예와 같은 기능을 낼 수 있다. 또, 본원 발명은 반송파신호도 연속된 식으로 나타낼 수 있으므로, 마이크로프로세서 등을 이용한 전(全)디지탈회로에 적합하다고 하는 효과가 있다.
이상 설명한 바와 같이, 본원 발명은 반송파로서 정현파신호를 사용하여 변조파의 위상급변에 추정해서 반송파의 위상도 변화시키고 있으므로, 변조파의 위상급변이 있더라도 PWM 인버터의 출력전압을 정현파로 하는 PWM 펄스를 발생시킬 수 있다. 그 결과로서 벡터제어를 정밀도 높게 행할 수 있다. 또, 반송파 신호와 변조파 신호가 연속된 정현함수로 되므로, 마이크로프로세서 등을 사용한 디지탈제어에서도 용이하게 실현할 수 있다고 하는 효과도 얻는다.
Claims (3)
- 정현파변조파와 정현파변송파를 비교하여 PWM 인버터에 부여하는 PWM 펄스를 발생하는 PWM 펄스발생장치에 있어서, 상기 PWM 인버터의 1차각주파수(角周波數)지령과 상기 반송파의 주파수비를 설정하는 주파수비설정수단(30)과, 상기 제1차각주파수지령과 상기 주파수비로부터 상기 반송파의 각주파수를 구하는 반송파각주파수연산수단(9)과, 상기 변조파의 위상지령과 상기 주파수비를 입력하여 상기 반송파의 변화시켜야 할 위상변화량을 구하는 위상변화검출수단(33)과, 상기 위상변화량을 입력하여 상기 반송파의 위상을 지령하는 반송파위상지령수단(31)과, 상기 반송파각주파수와 상기 반송파위상지령을 가산한 제1의 신호를 출력하는 제1수단(22)과, 상기 제1의 신호를 상기 주파수비로 제산(除算)한 제2의 신호를 출력하는 제2수단(25)과, 상기 제1의 신호를 제1의 정현파신호로 변환하는 제1정현파변환수단(27)과, 상기 제2의 신호를 상기 변조파의 진폭지령에 맞는 크기의 진폭을 가진 제2의 정현파신호로 변환하는 제2정현파변환수단(26)과, 상기 제1과 제2의 정현파신호를 비교하여 상기 PWM 인버터에 부여하는 PWM 펄스를 출력하는 비교수단(29)을 구비하는 것을 특징으로 하는 PWM 펄스발생장치.
- 제1항에 있어서, 상기 주파수비설정수단(30)은 상기 1차 각주파수지령이 커짐에 따라 상기 주파수비를 작게 하는 것을 특징으로 하는 PWM 펄스발생장치.
- 제1항에 있어서, 상기 제1정현파변환수단(27)은 상기 제2의 정현파신호의 최대진폭보다 큰 진폭의 제1의 정현파신호를 발생하는 것을 특징으로 하는 PWM 펄스발생장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP83-16039 | 1983-02-04 | ||
| JP58016039A JPH0667205B2 (ja) | 1983-02-04 | 1983-02-04 | Pwmパルス発生装置 |
| JP83-160390 | 1983-02-04 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR840008089A KR840008089A (ko) | 1984-12-12 |
| KR920000835B1 true KR920000835B1 (ko) | 1992-01-30 |
Family
ID=11905436
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1019840000408A KR920000835B1 (ko) | 1983-02-04 | 1984-01-30 | Pwm 펄스발생장치 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US4628475A (ko) |
| JP (1) | JPH0667205B2 (ko) |
| KR (1) | KR920000835B1 (ko) |
| BR (1) | BR8400484A (ko) |
| DE (1) | DE3403802A1 (ko) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0628520B2 (ja) * | 1984-03-21 | 1994-04-13 | 株式会社日立製作所 | Pwmパルス発生装置 |
| EP0267583B1 (en) * | 1986-11-14 | 1992-11-11 | Kabushiki Kaisha Toshiba | Turbine helper drive apparatus |
| JPH07118956B2 (ja) * | 1987-02-17 | 1995-12-18 | 株式会社明電舎 | ベクトル制御装置 |
| US5123080A (en) * | 1987-03-20 | 1992-06-16 | Ranco Incorporated Of Delaware | Compressor drive system |
| US4808903A (en) * | 1987-04-13 | 1989-02-28 | Hitachi, Ltd. | Vector control system for induction motors |
| JPH01152928A (ja) * | 1987-12-09 | 1989-06-15 | Toshiba Corp | 電力変換装置の制御装置 |
| US4904919A (en) * | 1988-06-21 | 1990-02-27 | Allen-Bradley Company, Inc. | Dual mode control of a PWM motor drive for current limiting |
| JPH0785524B2 (ja) * | 1988-12-28 | 1995-09-13 | パイオニア株式会社 | パルス幅変調増幅回路 |
| FR2644307A1 (fr) * | 1989-03-13 | 1990-09-14 | Renault | Systeme de commande en couple d'un moteur asynchrone |
| US4987358A (en) * | 1989-04-21 | 1991-01-22 | Branam Timothy R | Electronic torque switch |
| JPH03139192A (ja) * | 1989-10-23 | 1991-06-13 | Mitsubishi Electric Corp | 電動機制御装置 |
| US5032771A (en) * | 1990-08-09 | 1991-07-16 | Allen-Bradley Company, Inc. | Slip control based on sensing voltage fed to an induction motor |
| US5126642A (en) * | 1991-01-31 | 1992-06-30 | Ranco Incorporated Of Delaware | Variable speed motor control |
| DE4111226A1 (de) * | 1991-04-08 | 1992-10-15 | Asea Brown Boveri | Verfahren zur steuerung elektrischer ventile eines stromrichters |
| US5156005A (en) * | 1991-05-24 | 1992-10-20 | Sunpower, Inc. | Control of stirling cooler displacement by pulse width modulation of drive motor voltage |
| DE4335857A1 (de) * | 1993-10-21 | 1995-04-27 | Abb Management Ag | Stromrichterschaltungsanordnung und Verfahren zur Ansteuerung derselben |
| US5844397A (en) * | 1994-04-29 | 1998-12-01 | Reda Pump | Downhole pumping system with variable speed pulse width modulated inverter coupled to electrical motor via non-gap transformer |
| JP3233005B2 (ja) * | 1996-03-01 | 2001-11-26 | 株式会社日立製作所 | Pwm制御装置 |
| US5909098A (en) * | 1996-05-02 | 1999-06-01 | Reda Pump | Downhole pumping system with variable speed pulse-width modulated inverter coupled to electrical motor via non-gap transformer |
| US5959430A (en) * | 1997-03-07 | 1999-09-28 | Kabushiki Kaisha Toshiba | Power conversion system |
| JP4576739B2 (ja) * | 2001-04-02 | 2010-11-10 | パナソニック電工株式会社 | ポンプ用モータ駆動制御装置 |
| JP3660638B2 (ja) * | 2002-03-27 | 2005-06-15 | 株式会社東芝 | クロック抽出回路 |
| US7049771B2 (en) * | 2004-01-27 | 2006-05-23 | Nippon Yusoki Co., Ltd. | Multi-phase carrier signal generator and multi-phase carrier signal generation method |
| US7049778B2 (en) * | 2004-02-09 | 2006-05-23 | Nippon Yusoki Co., Ltd. | Inverter control apparatus and inverter control method |
| US6985018B2 (en) * | 2004-03-29 | 2006-01-10 | Bei Sensors & Systems Company, Inc. | Programmable, multi-turn, pulse width modulation circuit for a non-contact angular position sensor |
| US8355465B2 (en) | 2004-11-10 | 2013-01-15 | Sige Semiconductor (Europe) Limited | Driver circuit for driving a power amplifier |
| CN1848683B (zh) * | 2005-04-15 | 2010-05-05 | 鸿富锦精密工业(深圳)有限公司 | 三角波发生器及包含它的脉宽调制信号发生电路 |
| TWI404324B (zh) * | 2008-05-15 | 2013-08-01 | Delta Electronics Inc | 馬達控制裝置及其控制方法 |
| JP5446627B2 (ja) * | 2009-09-08 | 2014-03-19 | 株式会社安川電機 | エレベータの制御装置及びその制御方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3509445A (en) * | 1967-01-16 | 1970-04-28 | Lear Siegler Inc | Pulse width modulated power amplifier |
| US3824437A (en) * | 1969-08-14 | 1974-07-16 | Siemens Ag | Method for controlling asynchronous machines |
| DE1941312B2 (de) * | 1969-08-14 | 1972-11-23 | Siemens AG, 1000 Berlin u. 8000 München | Verfahren und einrichtung zur steuerung von asynchronmaschinen |
| JPS5111125A (en) | 1974-07-19 | 1976-01-29 | Yaskawa Denki Seisakusho Kk | Judokino seigyosochi |
| US4047083A (en) * | 1976-03-08 | 1977-09-06 | General Electric Company | Adjustable speed A-C motor drive with smooth transition between operational modes and with reduced harmonic distortion |
| NL7604119A (nl) * | 1976-04-20 | 1976-12-31 | Philips Nv | Schakeling voor het opwekken van een in impuls- breedte gemoduleerd signaal. |
| US4099109A (en) * | 1976-10-01 | 1978-07-04 | Westinghouse Electric Corp. | Digital apparatus for synthesizing pulse width modulated waveforms and digital pulse width modulated control system |
| US4140980A (en) * | 1978-02-24 | 1979-02-20 | Rockwell International Corporation | Compensation circuit for trailing edge distortion of pulse-width modulated signal |
| NL7805232A (nl) * | 1978-05-16 | 1979-11-20 | Philips Nv | Werkwijze voor het reduceren van interferentiekomponenten in een frequentiegemoduleerd signaal en inrichting voor het uitvoeren van deze werkwijze. |
| JPS56101379A (en) * | 1980-01-11 | 1981-08-13 | Hitachi Ltd | Controlling method and apparatus for pulse width modulating inverter |
| JPS5833998A (ja) * | 1981-08-21 | 1983-02-28 | Hitachi Ltd | パルス幅変調インバ−タによる誘導電動機の制御方式 |
| US4382275A (en) * | 1981-12-07 | 1983-05-03 | Sundstrand Corporation | PWM Inverter circuit |
| JPS58103875A (ja) * | 1981-12-15 | 1983-06-21 | Hitachi Ltd | パルス幅変調インバータの出力電圧制御装置 |
| US4524335A (en) * | 1982-03-13 | 1985-06-18 | Nippon Gakki Seizo Kabushiki Kaisha | Pulse-width modulation circuit with carrier signal frequency control |
| JPH01112576A (ja) * | 1987-10-26 | 1989-05-01 | Mitsubishi Electric Corp | 光学式情報記録再生装置 |
-
1983
- 1983-02-04 JP JP58016039A patent/JPH0667205B2/ja not_active Expired - Lifetime
-
1984
- 1984-01-30 KR KR1019840000408A patent/KR920000835B1/ko not_active IP Right Cessation
- 1984-02-03 US US06/576,720 patent/US4628475A/en not_active Expired - Fee Related
- 1984-02-03 BR BR8400484A patent/BR8400484A/pt not_active IP Right Cessation
- 1984-02-03 DE DE19843403802 patent/DE3403802A1/de active Granted
Also Published As
| Publication number | Publication date |
|---|---|
| DE3403802C2 (ko) | 1992-04-09 |
| BR8400484A (pt) | 1984-09-11 |
| JPH0667205B2 (ja) | 1994-08-24 |
| US4628475A (en) | 1986-12-09 |
| JPS59144396A (ja) | 1984-08-18 |
| DE3403802A1 (de) | 1984-08-16 |
| KR840008089A (ko) | 1984-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR920000835B1 (ko) | Pwm 펄스발생장치 | |
| Kulkarni et al. | A novel position sensor elimination technique for the interior permanent-magnet synchronous motor drive | |
| JP4045105B2 (ja) | パルス幅変調方法、電力変換装置、およびインバータ装置 | |
| EP0030462B1 (en) | Induction motor drive apparatus | |
| US7187155B2 (en) | Leakage inductance saturation compensation for a slip control technique of a motor drive | |
| KR960005691B1 (ko) | 전력 변환 장치 | |
| JPS5856426B2 (ja) | 電磁トルク脈動成分測定方法及び回路 | |
| EP0121792A2 (en) | Vector control method and system for an induction motor | |
| JP2644750B2 (ja) | 電圧形インバータの制御方法 | |
| JPH0628520B2 (ja) | Pwmパルス発生装置 | |
| JP3536114B2 (ja) | 電力変換器の制御方法および電力変換装置 | |
| JP2702936B2 (ja) | 電圧形インバータの制御方法及び装置 | |
| JPH0314000Y2 (ko) | ||
| JP3957369B2 (ja) | 誘導電動機制御装置 | |
| KR102133181B1 (ko) | 인버터 제어장치 | |
| US11482963B2 (en) | Inverter control device | |
| KR100339268B1 (ko) | 인버터의 출력전압 오차 보상 방법 | |
| JP2531682B2 (ja) | 電流形pwmコンバ―タの制御装置 | |
| JP2531681B2 (ja) | 電流形pwmコンバ―タの制御装置 | |
| SU699643A2 (ru) | Устройство дл управлени асинхронным короткозамкнутым электродвигателем | |
| KR920011005B1 (ko) | 유도전동기의 벡터(vector)제어방법과 장치 | |
| JPH0413955B2 (ko) | ||
| KR950005559B1 (ko) | 위상추적 제어시스템 | |
| JPS62230365A (ja) | 電圧形pwmインバ−タ制御装置 | |
| KR100303003B1 (ko) | 유도전동기의구동장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| G160 | Decision to publish patent application | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 19971217 Year of fee payment: 7 |
|
| LAPS | Lapse due to unpaid annual fee |