KR20180058854A - 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 - Google Patents
물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 Download PDFInfo
- Publication number
- KR20180058854A KR20180058854A KR1020187014458A KR20187014458A KR20180058854A KR 20180058854 A KR20180058854 A KR 20180058854A KR 1020187014458 A KR1020187014458 A KR 1020187014458A KR 20187014458 A KR20187014458 A KR 20187014458A KR 20180058854 A KR20180058854 A KR 20180058854A
- Authority
- KR
- South Korea
- Prior art keywords
- substrate
- holding
- unit
- section
- air
- Prior art date
Links
Images







Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/20—Exposure; Apparatus therefor
- G03F7/22—Exposing sequentially with the same light pattern different positions of the same surface
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/063—Transporting devices for sheet glass
- B65G49/064—Transporting devices for sheet glass in a horizontal position
- B65G49/065—Transporting devices for sheet glass in a horizontal position supported partially or completely on fluid cushions, e.g. a gas cushion
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
- G03F7/70725—Stages control
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70758—Drive means, e.g. actuators, motors for long- or short-stroke modules or fine or coarse driving
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70791—Large workpieces, e.g. glass substrates for flat panel displays or solar panels
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/708—Construction of apparatus, e.g. environment aspects, hygiene aspects or materials
- G03F7/70808—Construction details, e.g. housing, load-lock, seals or windows for passing light in or out of apparatus
- G03F7/70816—Bearings
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6838—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping with gripping and holding devices using a vacuum; Bernoulli devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2249/00—Aspects relating to conveying systems for the manufacture of fragile sheets
- B65G2249/04—Arrangements of vacuum systems or suction cups
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49998—Work holding
Landscapes
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Environmental & Geological Engineering (AREA)
- Epidemiology (AREA)
- Public Health (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
기판 (P) 의 하방에는, 기판 (P) 의 하면에 에어를 분출하는 복수의 에어 부상 유닛 (50) 이 배치되고, 기판 (P) 은, 대체로 수평이 되도록 비접촉 지지를 받는다. 또, 기판 (P) 은, 정점 스테이지 (40) 에 의해 피노광 부분이 하방으로부터 비접촉 유지되고, 그 피노광 부분의 면위치가 핀포인트 방식으로 조정된다. 따라서, 기판 (P) 에 고정밀도로 노광을 실시할 수가 있고, 또한 기판 스테이지 장치 (PST) 의 구성을 간단하게 할 수 있다.
Description
본 발명은, 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법에 관한 것이며, 더욱 상세하게는, 평판 모양의 물체에 대해 소정의 처리를 실시하는 물체 처리 장치, 상기 물체를 에너지 빔으로 노광하는 노광 장치 및 노광 방법, 그리고 상기 물체 처리 장치, 상기 노광 장치 및 상기 노광 방법 중 어느 것을 이용하는 디바이스 제조 방법에 관한 것이다.
종래, 액정 표시 소자 또는 반도체 소자 (집적 회로 등) 등의 전자 디바이스 (마이크로 디바이스) 를 제조하는 리소그래피 공정에서는, 스텝-앤드-리피트 (step-and-repeat) 방식의 투영 노광 장치 (이른바 스테퍼), 또는 스텝-앤드-스캔 (step-and-scan) 방식의 투영 노광 장치 (이른바 스캐닝 스테퍼 (스캐너라고도 불린다)) 등의 노광 장치가 주로 이용되었다.
이 종류의 노광 장치에서는, 노광 대상물로서 표면에 감광제가 도포된 유리 플레이트 또는 웨이퍼 등의 기판 (이하, 기판이라 총칭한다) 은, 기판 스테이지 장치 상에 재치 (載置) 된다. 그리고, 회로 패턴이 형성된 마스크 (또는 레티클) 에 노광 광을 조사해, 그 마스크를 경유한 노광 광을 투영 렌즈 등의 광학계를 통해 기판에 조사하여, 회로 패턴이 기판 상으로 전사된다 (예를 들어, 특허문헌 1 (및 대응하는 특허문헌 2) 참조).
하지만, 최근, 노광 장치의 노광 대상물인 기판, 특히 액정 표시 소자용의 기판 (직사각형 형상의 유리 기판) 은, 그 사이즈가, 예를 들어 한 변 길이가 3 미터 이상이 되는 등 대형화하는 경향에 있어, 이것에 수반해 노광 장치의 스테이지 장치도 대형화해, 그 중량도 증대하고 있다. 이 때문에, 노광 대상물 (기판) 을 고속 및 고정밀도로 안내할 수 있고 또한 사이즈 및 중량이 감소될 수 있는 간단한 구성의 스테이지 장치의 개발이 소망되었다.
본 발명의 제 1 양태에 의하면, 서로 직교하는 제 1 축 및 제 2 축을 포함하는 소정의 이차원 평면을 따라 배치된 평판 모양의 물체에 대해 소정의 처리를 실시하는 물체 처리 장치로서, 상기 물체의 일면측의 일부의 영역에 소정의 동작을 실행하는 실행 장치와; 상기 물체 가운데, 상기 일부의 영역을 포함하는 부분을, 상기 물체의 하방으로부터 비접촉 상태로 유지 (hold) 하는 유지면을 가지며, 상기 부분의 상기 이차원 평면에 교차하는 방향의 위치를 조정하는 조정 장치와; 상기 물체의, 상기 조정 장치에 의해 유지되는 상기 부분을 제외한 다른 영역에 지지면을 대향시켜 상기 물체를 하방으로부터 비접촉 지지하는 비접촉 지지 장치를 구비하는, 상기 물체 처리 장치가 제공된다.
이 장치에 의하면, 평판 모양의 물체는 비접촉 지지 장치에 의해 하방으로부터 비접촉 지지를 받는다. 또, 실행 장치에 의해, 물체의 일부분에 소정의 동작을 실시하고, 그 소정의 동작이 실시되는 부분이, 특히 조정 장치에 의해 하방으로부터 비접촉 유지되며, 그 부분의 이차원 평면에 교차하는 방향의 위치가 조정된다. 따라서, 물체에 높은 정밀도로 소정의 처리를 실시할 수 있다. 또, 조정 장치가, 소정의 동작이 실시되는 부분만을 핀포인트 (pinpoint) 방식으로 조정하므로, 물체 전체의 이차원 평면에 교차하는 방향의 위치를 조정하는 경우에 비해 장치 구성을 간단하게 할 수 있다.
본 발명의 제 2 양태에 의하면, 물체에 에너지 빔을 조사해 상기 물체를 노광하여 소정의 패턴을 상기 물체 상에 형성하는 노광 장치로서, 서로 직교하는 제 1 축 및 제 2 축을 포함하는 소정의 이차원 평면을 따라 배치된 상기 물체의 상기 에너지 빔이 조사되는 일부의 영역을 포함하는 부분을, 상기 물체의 하방으로부터 비접촉 상태로 유지하는 부재를 포함하고, 상기 부분의 상기 이차원 평면에 교차하는 방향의 위치를 조정하는 정점 스테이지 (fixed-point stage) 와; 상기 물체의, 상기 유지면에 의해 유지되는 부분을 제외한 다른 영역에 지지면을 대향시켜 상기 물체를 하방으로부터 비접촉 지지하는 비접촉 지지 장치를 구비하는, 상기 노광 장치가 제공된다.
이 장치에 의하면, 평판 모양의 물체는 비접촉 지지 장치에 의해 하방으로부터 비접촉 지지를 받는다. 또, 물체의, 에너지 빔이 조사되는 일부의 영역을 포함하는 부분이, 특히 정점 스테이지에 의해 하방으로부터 비접촉 유지되고, 그 부분의 이차원 평면에 교차하는 방향의 위치가 조정된다. 따라서, 물체를 고정밀도로 노광할 수 있다. 또, 정점 스테이지가, 물체의 에너지 빔이 조사되는 부분만을 핀포인트 방식으로 조정하므로, 물체 전체의 이차원 평면에 교차하는 방향의 위치를 조정하는 경우에 비해 장치 구성을 간단하게 할 수 있다.
본 발명의 제 3 양태에 의하면, 본 발명의 물체 처리 장치 또는 노광 장치를 이용해 물체를 노광하는 단계; 및 상기 노광된 물체를 현상하는 단계를 포함하는, 디바이스 제조 방법이 제공된다.
여기서, 물체로서 플랫-패널 디스플레이용의 기판을 사용하는 것에 의해, 디바이스로서 플랫-패널 디스플레이를 제조하는 제조 방법이 제공된다.
본 발명의 제 4 양태에 의하면, 물체에 에너지 빔을 조사해 물체를 노광하여 소정의 패턴을 상기 물체 상에 형성하는 노광 방법으로서, 서로 직교하는 제 1 축 및 제 2 축을 포함하는 소정의 이차원 평면을 따라 배치된 상기 물체의 상기 에너지 빔이 조사되는 일부의 영역을 포함하는 부분을, 상기 물체의 하방으로부터 상기 이차원 평면 내의 위치가 고정된 유지 부재에 의해 비접촉 상태로 유지하고, 상기 부분의 상기 이차원 평면에 교차하는 방향의 위치를 조정하는 단계; 및 상기 물체의 상기 유지 부재에 의해 유지되는 부분을 제외한 다른 영역에 지지 부재의 지지면을 대향시켜 상기 물체를 하방으로부터 비접촉 지지하는 단계를 포함하는, 상기 노광 방법이 제공된다.
이 방법에 의하면, 물체는, 지지 부재에 의해 하방으로부터 비접촉 지지를 받는다. 또, 물체의 에너지 빔이 조사되는 일부의 영역을 포함하는 부분이, 특히 이차원 평면 내의 위치가 고정된 유지 부재에 의해 하방으로부터 비접촉 유지되고, 그 부분의 이차원 평면에 교차하는 방향의 위치가 조정된다. 따라서, 물체를 고정밀도로 노광 할 수 있다. 또, 유지 부재가, 물체의 에너지 빔이 조사되는 부분만을 핀포인트 방식으로 조정한다.
본 발명의 제 5 양태에 의하면, 본 발명의 노광 방법을 이용해 물체를 노광하는 단계; 및 상기 노광된 물체를 현상하는 단계를 포함하는, 디바이스 제조 방법이 제공된다.
도 1 은 제 1 실시형태의 액정 노광 장치의 개략 구성을 나타내는 도면이다.
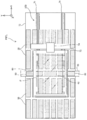
도 2 는 도 1 의 액정 노광 장치가 갖는 기판 스테이지 장치의 평면도이다.
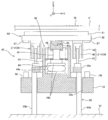
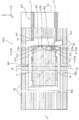
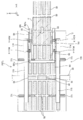
도 3 은 도 2 의 A-A 선 단면도이다.
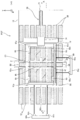
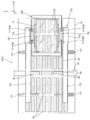
도 4 는 도 2 의 기판 스테이지 장치가 갖는 정점 스테이지의 단면도이다.
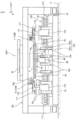
도 5(A) 는 도 2 의 기판 스테이지 장치가 갖는 기판 유지 프레임의 일부를 확대해 나타낸 평면도이며, 도 5(B) 는, 도 5(A) 의 B-B 선 단면도이다.
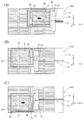
도 6(A) ~ 도 6(C) 는, 기판에 노광 처리를 실시할 때의 기판 스테이지 장치의 동작을 설명하기 위한 도이다.
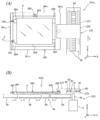
도 7(A) 는, 제 2 실시형태에 관련된 기판 스테이지 장치의 평면도이며, 도 7(B) 는, 도 7(A) 의 C-C 선 단면도이다.
도 8 은 제 3 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 9 는 제 4 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 10 은 도 9 의 D-D 선 단면도이다.
도 11 은 제 5 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 12 는 도 11 의 E-E 선 단면도이다.
도 13 은 제 6 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 14 는 제 7 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
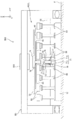
도 15 는 도 14 의 기판 스테이지 장치를 +X 측에서 본 측면도이다.
도 16 은 제 8 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 17 은 제 9 실시형태에 관련된 기판 검사 장치의 개략 구성을 나타내는 도면이다.
도 2 는 도 1 의 액정 노광 장치가 갖는 기판 스테이지 장치의 평면도이다.
도 3 은 도 2 의 A-A 선 단면도이다.
도 4 는 도 2 의 기판 스테이지 장치가 갖는 정점 스테이지의 단면도이다.
도 5(A) 는 도 2 의 기판 스테이지 장치가 갖는 기판 유지 프레임의 일부를 확대해 나타낸 평면도이며, 도 5(B) 는, 도 5(A) 의 B-B 선 단면도이다.
도 6(A) ~ 도 6(C) 는, 기판에 노광 처리를 실시할 때의 기판 스테이지 장치의 동작을 설명하기 위한 도이다.
도 7(A) 는, 제 2 실시형태에 관련된 기판 스테이지 장치의 평면도이며, 도 7(B) 는, 도 7(A) 의 C-C 선 단면도이다.
도 8 은 제 3 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 9 는 제 4 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 10 은 도 9 의 D-D 선 단면도이다.
도 11 은 제 5 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 12 는 도 11 의 E-E 선 단면도이다.
도 13 은 제 6 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 14 는 제 7 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 15 는 도 14 의 기판 스테이지 장치를 +X 측에서 본 측면도이다.
도 16 은 제 8 실시형태에 관련된 기판 스테이지 장치의 평면도이다.
도 17 은 제 9 실시형태에 관련된 기판 검사 장치의 개략 구성을 나타내는 도면이다.
- 제 1 실시형태
이하, 본 발명의 제 1 실시형태에 대해, 도 1 ~ 도 6(C) 를 참조하여 설명한다.
도 1 에는, 제 1 실시형태에 관련된, 플랫 패널 디스플레이, 예를 들어 액정 표시 장치 (액정 패널) 등의 제조에 사용되는 액정 노광 장치 (10) 의 개략 구성이 나타나 있다. 액정 노광 장치 (10) 는, 액정 표시 장치의 표시 패널에 사용되는 직사각형 형상의 유리 기판 (P) (이하, 단순히 기판 (P) 이라고 칭한다) 을 노광 대상물로 하는 스텝-앤드-스캔 방식의 투영 노광 장치, 이른바 스캐너이다.
액정 노광 장치 (10) 는, 도 1 에 나타나듯이, 조명계 (IOP), 마스크 (M) 를 유지하는 마스크 스테이지 (MST), 투영 광학계 (PL), 마스크 스테이지 (MST) 및 투영 광학계 (PL) 등이 탑재된 보디 (body) (BD), 기판 (P) 을 유지하는 기판 스테이지 장치 (PST), 및 이들의 제어계 등을 구비하고 있다. 이하의 설명에서는, 노광 동안 마스크 (M) 와 기판 (P) 이 투영 광학계 (PL) 에 대해 각각 상대 주사되는 방향을 X-축 방향으로 하고, 수평면 내에서 X-축 방향에 직교하는 방향을 Y-축 방향으로 하며, X-축 방향 및 Y-축 방향에 직교하는 방향을 Z-축 방향으로 하고, X-축, Y-축, 및 Z-축 주위의 회전 (경사) 방향을 각각 θx, θy, 및 θz 방향으로 하여 설명을 실시한다.
조명계 (IOP) 는, 예를 들어 미국 특허 제 6,552,775 호 등에 개시된 조명계 와 유사하게 구성된다. 즉, 조명계 (IOP) 는, 도시되지 않은 광원 (예를 들어, 수은 램프) 으로부터 사출된 광을, 도시되지 않은 반사경, 다이크로익 (dichroic) 미러, 셔터, 파장 선택 필터, 각종 렌즈 등을 통해, 노광용 조명광 (조명광) (IL) 으로서 마스크 (M) 에 조사한다. 조명광 (IL) 으로서는, 예를 들어, i-선 (파장 365nm), g-선 (파장 436nm), 또는 h-선 (파장 405nm) 등의 광 (또는, 상기 i-선, g-선, h-선의 합성 광) 이 사용된다. 또, 조명광 (IL) 의 파장은, 파장 선택 필터에 의해, 예를 들어 요구되는 해상도에 따라 적절히 전환될 수 있다.
마스크 스테이지 (MST) 상에, 회로 패턴 등이 그 패턴 면 (도 1 에 있어서의 아래쪽 면) 에 형성된 마스크 (M) 가, 예를 들어 진공 흡착 (또는 정전 흡착) 에 의해 고정된다. 마스크 스테이지 (MST) 는, 후술하는 보디 (BD) 의 일부인 경통 정반 (barrel surface plate; 31) 의 상면에 고정된 한 쌍의 마스크 스테이지 가이드 (35) 상에, 예를 들어 도시 생략의 에어 베어링 (air bearing) 을 개재하여 비접촉 상태로 부상 지지를 받고 있다. 마스크 스테이지 (MST) 는, 예를 들어 리니어 모터를 포함하는 마스크 스테이지 구동계 (도시 생략) 에 의해, 한 쌍의 마스크 스테이지 가이드 (35) 상에서, 주사 방향 (X-축 방향) 으로 소정의 스트로크 (stroke) 로 구동됨과 함께, 필요에 따라 Y-축 방향 및 θz 방향으로 미소 구동된다. 마스크 스테이지 (MST) 의 XY 평면 내의 위치 정보 (θz 방향의 회전 정보를 포함) 는, 도시 생략의 레이저 간섭계를 포함하는 마스크 간섭계 시스템에 의해 계측된다.
투영 광학계 (PL) 는, 마스크 스테이지 (MST) 의 도 1 에서의 하방에서, 경통 정반 (31) 에 의해 지지를 받고 있다. 본 실시형태의 투영 광학계 (PL) 는, 예를 들어 미국 특허 제 6,552,775 호에 개시된 투영 광학계와 유사한 구성을 가지고 있다. 즉, 투영 광학계 (PL) 는, 마스크 (M) 의 패턴 이미지의 소정 형상, 예를 들어 사다리꼴 형상의 투영 영역이 지그재그 형상으로 배치된 복수의 투영 광학계 (멀티-렌즈 투영 광학계) 를 포함하고, Y-축 방향을 길이 방향으로 하는 직사각형 형상의 단일의 이미지 필드를 가지는 투영 광학계와 동등하게 기능한다. 본 실시형태에서는, 복수의 투영 광학계 각각으로서는, 예를 들어, 양측 텔레센트릭 등배계 (both-side telecentric equal-magnification system) 로 정립 정상 (erected normal image) 을 형성하는 것이 이용되고 있다. 또, 이하의 설명에서는, 투영 광학계 (PL) 의 지그재그 형상으로 배치된 복수의 투영 영역을 총칭해 노광 영역 (IA) (도 2 참조) 이라고 부른다.
따라서, 조명계 (IOP) 로부터의 조명광 (IL) 에 의해 마스크 (M) 상의 조명 영역이 조명될 때, 투영 광학계 (PL) 의 제 1 면 (물체면) 과 패턴 면이 거의 일치해 배치되는 마스크 (M) 를 통과한 조명광 (IL) 에 의해, 투영 광학계 (PL) 를 통해, 조명 영역 내의 마스크 (M) 의 회로 패턴의 투영 이미지 (부분 정립 이미지) 가, 투영 광학계 (PL) 의 제 2 면 (이미지면) 측에 배치되는, 표면에 레지스트 (감응제) 가 도포된 기판 (P) 상의 조명 영역에 공액인, 조명광 (IL) 의 조사 영역 (노광 영역 (IA)) 에 형성된다. 그 다음, 마스크 스테이지 (MST) 와 기판 스테이지 장치 (PST) 의 동기 구동에 의해, 조명 영역 (조명광 (IL)) 에 대해 마스크 (M) 를 주사 방향 (X-축 방향) 으로 상대 이동시키고 또한 노광 영역 (IA) (조명광 (IL)) 에 대해 기판 (P) 을 주사 방향 (X-축 방향) 으로 상대 이동시킴으로써, 기판 (P) 상의 하나의 쇼트 영역 (구획 영역) 의 주사 노광을 수행하여, 그 쇼트 영역에 마스크 (M) 의 패턴 (마스크 패턴) 이 전사된다. 즉, 본 실시형태에서는, 조명계 (IOP) 및 투영 광학계 (PL) 에 의해 기판 (P) 상에 마스크 (M) 의 패턴이 생성되고, 조명광 (IL) 에 의한 기판 (P) 상의 감응층 (레지스트 층) 의 노광에 의해 기판 (P) 상에 그 패턴이 형성된다.
보디 (BD) 는, 예를 들어 미국 특허 출원 공개공보 제 2008/0030702 호 등에 개시되어 있는 바와 같이, 전술한 경통 정반 (31) 과, 경통 정반 (31) 의 +Y 측 및 -Y 측의 단부를 플로어 (floor) 면 (F) 상에서 하방으로부터 지지하는 한 쌍의 지지벽 (32) 을 가지고 있다. 한 쌍의 지지벽 (32) 의 각각은, 예를 들어 에어 (air) 스프링을 포함하는 방진대 (34) 를 개재하여 플로어 면 (F) 상에 지지를 받고 있고, 보디 (BD) 는 플로어 면 (F) 에 대해 진동 면에서 분리된다. 또, 한 쌍의 지지벽 (32) 사이에는 Y-축에 평행하게 연장된 단면 직사각형 형상 (도 3 참조) 의 부재로 이루어진 Y 빔 (33) 이 설치되어 있다. Y 빔 (33) 의 아래쪽 면과 후술하는 정반 (12) 의 상면 사이에는, 소정의 클리어런스 (clearance) 가 형성되어 있다. 즉, Y 빔 (33) 과 정반 (12) 은 비접촉이며 진동 면에서 분리되어 있다.
기판 스테이지 장치 (PST) 는, 플로어 면 (F) 상에 설치된 정반 (12) 과, 노광 영역 (IA) (도 2 참조) 의 바로 아래에서 기판 (P) 을 하방으로부터 비접촉 방식으로 유지하는 정점 스테이지 (40) (도 2 참조) 와, 정반 (12) 상에 설치된 복수의 에어 부상 유닛 (50) 과, 기판 (P) 을 유지하는 기판 유지 프레임 (60) 과, 기판 유지 프레임 (60) 을 X-축 방향 및 Y-축 방향으로 (XY 평면을 따라) 구동하는 구동 유닛 (70) 을 구비하고 있다.
도 2 에 나타나듯이, 정반 (12) 은, 평면시로 (+Z 측에서 보았을 때) X-축 방향을 길이 방향으로 하는 직사각형 형상 판상 (plate shaped) 의 부재로 이루어진다.
정점 스테이지 (40) 는, 정반 (12) 상의 중앙으로부터 약간 -X 측의 위치에 배치되어 있다. 또, 도 4 에 나타나듯이, 정점 스테이지 (40) 는, Y 빔 (33) 상에 탑재된 중량 캔슬러 (weight canceller) (42), 중량 캔슬러 (42) 에 의해 지지를 받는 척 (chuck) 부재 (에어 척 유닛) (80), 에어 척 유닛 (80) 을 XY 평면에 교차하는 방향으로 구동하기 위한 액츄에이터 (actuator), 예를 들어 복수의 Z 보이스 코일 모터 (voice coil motor) (이하, Z-VCM 으로 약칭한다) 등을 구비하고 있다.
중량 캔슬러 (42) 는, 예를 들어 Y 빔 (33) 에 고정된 케이스 (43) 와, 케이스 (43) 내의 최하부에 수용된 에어 스프링 (44) 과, 에어 스프링 (44) 에 의해 지지를 받는 Z 슬라이더 (45) 를 구비하고 있다. 케이스 (43) 는, +Z 측이 개방된 저부를 갖는 실린더형 부재로 이루어진다. 에어 스프링 (44) 은, 고무계의 재료로 형성된 중공 (hollow) 부재로 이루어진 벨로우즈 (bellows) (44a) 와, 벨로우즈 (44a) 의 상방 (+Z 측) 및 하방 (-Z 측) 에 배치된, XY 평면에 평행한 한 쌍의 플레이트 (44b) (예를 들어, 금속 판) 를 갖는다. 벨로우즈 (44a) 의 내부는, 도시되지 않은 기체 공급 장치로부터 기체가 공급되기 때문에, 외부에 비해 기압이 높은 양압 (positive pressure) 공간으로 설정된다. 중량 캔슬러 (42) 는, 에어 스프링 (44) 에 의해 발생하는 상방향 (+Z 방향) 의 힘으로, 기판 (P), 에어 척 유닛 (80), Z 슬라이더 (45) 등의 중량 (중력 가속도로 인한 하방향 (-Z 방향) 의 힘) 을 캔슬 (cancel) 하는 것에 의해 복수의 Z-VCM 에 대한 부하를 감소시킨다.
Z 슬라이더 (45) 는, 하단부가 에어 스프링 (44) 의 +Z 측에 배치된 플레이트 (44b) 에 고정된, Z-축에 평행하게 연장된 기둥 모양의 부재로 이루어진다. Z 슬라이더 (45) 는, 복수의 평행판 스프링 (46) 을 개재하여 케이스 (43) 의 내벽면에 접속되어 있다. 평행판 스프링 (46) 은, 상하 방향으로 이격되어 배치된, XY 평면에 평행한 한 쌍의 판 스프링을 가지고 있다. 평행판 스프링 (46) 은, Z 슬라이더 (45) 의 +X 측, -X 측, +Y 측, 및 -Y 측의, 예를 들어 합계 4 개소에서, Z 슬라이더 (45) 및 케이스 (43) 를 접속하고 있다 (Z 슬라이더 (45) 의 +Y 측 및 -Y 측의 평행판 스프링은 도시 생략). Z 슬라이더 (45) 는, 각 평행판 스프링 (46) 의 강성 (stiffness) (인장 강성) 으로 인해 케이스 (43) 에 대한 XY 평면에 평행한 방향에 대한 상대 이동이 제한되는 반면, Z-축 방향에서는, 각 평행판 스프링 (46) 의 가요성 (flexibility) 으로 인해, 케이스 (43) 에 대해 Z-축 방향으로 미소 스트로크로 상대 이동 가능하게 되어 있다. 따라서, Z 슬라이더 (45) 는, 벨로우즈 (44a) 내의 기체의 압력이 조정됨으로써, Y 빔 (33) 에 대해 상하 이동한다. 또한, 기판 (P) 의 중량을 캔슬하기 위한 상방향 힘을 발생하는 부재로서는, 상기 에어 스프링 (벨로우즈) 에 한정하지 않고, 에어 실린더, 코일 스프링 등일 수도 있다. 또, Z 슬라이더의 XY 평면 내의 위치를 제한하는 부재로서는, 예를 들어 Z 슬라이더의 측면에 베어링면이 대향하는 비접촉 트러스트 (thrust) 베어링 (예를 들어 에어 베어링 등의 기체 정압 베어링) 등을 사용할 수도 있다 (PCT 국제 공개공보 제 2008/129762 호 (대응 미국 특허 출원 공개공보 제 2010/0018950 호 명세서) 참조).
에어 척 유닛 (80) 은, 기판 (P) 의 노광 영역 (IA) 에 대응하는 부분 (피노광 부분) 을, 기판 (P) 의 하면 측으로부터 비접촉으로 흡착 유지하는 척 본체 (81) 와, 척 본체 (81) 를 하방으로부터 지지하는 베이스 (82) 를 포함한다. 척 본체 (81) 의 상면 (+Z 측의 면) 은, 평면에서 보아 Y-축 방향을 길이 방향으로 하는 직사각형 형상을 갖고 (도 2 참조), 그 상면의 중심은, 노광 영역 (IA) 의 중심과 대체로 일치한다. 또, 척 본체 (81) 의 상면의 면적은, 노광 영역 (IA) 보다 넓게 설정되어 있고, 특히 주사 방향인 X-축 방향의 사이즈는, 노광 영역 (IA) 의 X-축 방향의 사이즈보다 길게 설정되어 있다.
척 본체 (81) 는 그 상면에, 도시되지 않은 복수의 기체 분출 포트 (gas jetting port) 를 가지고 있어, 도시되지 않은 기체 공급 장치로부터 공급되는 기체, 예를 들어 고압 기체를 기판 (P) 의 하면을 향하여 분출함으로써, 기판 (P) 을 부상 지지한다. 또, 척 본체 (81) 는, 그 상면에 도시되지 않은 복수의 기체 흡인 (suction) 포트를 가지고 있다. 척 본체 (81) 에는, 도시되지 않은 기체 흡인 장치 (진공 장치) 가 접속되어 있고, 그 기체 흡인 장치는, 척 본체 (81) 의 기체 흡인 포트를 통해, 척 본체 (81) 상면과 기판 (P) 아래쪽 면 사이에서 기체를 흡인해, 척 본체 (81) 와 기판 (P) 사이에 부압 (negative pressure) 을 발생시킨다. 에어 척 유닛 (80) 은, 척 본체 (81) 로부터 기판 (P) 의 하면에 분출되는 기체의 압력과, 척 본체 (81) 와 기판 (P) 의 하면 사이에서 기체를 흡인할 때 발생하는 부압 사이에서의 밸런스를 이용하여 기판 (P) 을 비접촉으로 흡착 유지한다. 이와 같이, 에어 척 유닛 (80) 은, 기판 (P) 에, 이른바 프리로드 (preload) 를 걸치므로, 척 본체 (81) 와 기판 (P) 사이에 형성되는 기체 (에어) 막 (membrane) 의 강성이 증가할 수 있고, 따라서, 기판 (P) 에 변형 또는 휘어진 상태가 있는 경우에도, 기판 (P) 중 투영 광학계 (PL) 의 바로 아래에 위치하는 피노광 부분을 확실하게 척 본체 (81) 의 유지면을 따라 교정할 수 있다. 하지만, 에어 척 유닛 (80) 은, 기판 (P) 의 XY 평면 내의 위치를 제한하지 않기 때문에, 기판 (P) 이 에어 척 유닛 (80) 에 의해 흡착 유지된 상태에 있는 경우에도, 조명광 (IL) (도 1 참조) 에 대해 X-축 방향 (스캔 방향) 및 Y-축 방향 (스텝 방향) 으로 각각 상대 이동할 수 있다.
여기서, 도 5(B) 에 나타나듯이, 본 실시형태에서는, 척 본체 (81) 의 상면 (기판 유지면) 과 기판 (P) 의 하면 사이의 거리 Da (클리어런스) 가, 예를 들어 0.02mm 정도가 되도록, 척 본체 (81) 의 상면으로부터 분출되는 기체의 유량 또는 압력, 및 기체 흡인 장치가 흡인하는 기체의 유량 또는 압력이 설정된다. 또한, 기체 분출 포트, 및 기체 흡인 포트는, 기계적 가공에 의해 형성될 수 있고, 또는, 척 본체 (81) 를 다공질 재료로 형성해, 그 구멍을 기체 분출 포트 및 기체 흡인 포트로 이용할 수 있다. 이 종류의 에어 척 유닛 (진공 프리로드 에어 베어링) 의 구성 및 기능의 상세한 내용은, 예를 들어 PCT 국제 공개공보 제 2008/121561 호 등에 개시되어 있다.
도 4 로 돌아와, 베이스 (82) 의 아래쪽 면 중앙에는, 반구면 형상의 베어링면을 갖는 기체 정압 베어링, 예를 들어 구면 에어 베어링 (83) 이 고정되어 있다. 구면 에어 베어링 (83) 은, Z 슬라이더 (45) 의 +Z 측의 단면 (상면) 에 형성된 반구 형상의 오목부 (45a) 에 맞춰진다. 이로써, 에어 척 유닛 (80) 이, XY 평면에 대해 스윙가능하게 (swingably) (θx 및 θy 방향으로 회전가능하게) Z 슬라이더 (45) 에 의해 지지를 받는다. 또한, 에어 척 유닛 (80) 을 XY 평면에 대해 스윙가능하게 지지하는 구조로서는, 예를 들어 PCT 국제 공개공보 제 2008/129762 호 (대응 미국 특허 출원 공개공보 제 2010/0018950 호) 에 개시된, 복수의 에어 패드 (에어 베어링) 를 사용하는 의사 (quasi) 구면 베어링 구조도 이용될 수 있고, 탄성 힌지 (hinge) 장치도 이용될 수 있다.
복수, 본 실시형태에서는 4 개의 Z-VCM 이, 중량 캔슬러 (42) 의 +X 측, -X 측, +Y 측, 및 -Y 측 각각에 1 개씩 형성되어 있다 (-Y 측의 Z-VCM 은 도 3 참조, +Y 측의 Z-VCM 은 도시 생략). 4 개의 Z-VCM 은, 그 설치 위치가 상이한 것 외에는 동일한 구성 및 기능을 가진다. 4 개의 Z-VCM 각각은, 정반 (12) 상에 설치된 베이스 프레임 (85) 에 고정된 Z 고정자 (stator) (47) 와, 에어 척 유닛 (80) 의 베이스 (82) 에 고정된 Z 가동자 (mover) (48) 를 포함한다.
베이스 프레임 (85) 은, 평면에서 보아 링 형상으로 형성된 판상 부재로 이루어진 본체부 (85a) 와, 본체부 (85a) 를 정반 (12) 상에서 하방으로부터 지지하는 복수의 다리부 (leg section; 85b) 를 포함한다. 본체부 (85a) 는, Y 빔 (33) 의 상방에 배치되고, 본체부 (85a) 의 중앙 부분에 형성된 개구부 안에 중량 캔슬러 (42) 가 삽입된다. 따라서, 본체부 (85a) 는, Y 빔 (33) 및 중량 캔슬러 (42) 각각과 비접촉으로 되어 있다. 복수 (이 경우, 3 개 이상) 의 다리부 (85b) 각각은, Z-축에 평행하게 연장된 부재로 이루어져, 다리부 (85b) 의 +Z 측의 단부가 본체부 (85a) 에 접속되고 -Z 측의 단부가 정반 (12) 에 고정되어 있다. 복수의 다리부 (85b) 각각은, Y 빔 (33) 에서 복수의 다리부 (85b) 에 각각 대응하도록 형성된, Z-축 방향으로 관통하는 복수의 관통 홀 (33a) 에 삽입되어 있고, Y 빔 (33) 과는 비접촉이 되어 있다.
Z 가동자 (48) 는, U-자 모양의 단면 형상을 갖는 부재로 이루어지고, 한 쌍의 대향면 각각에 자석을 포함하는 자석 유닛 (49) 을 가지고 있다. 한편, Z 고정자 (47) 는, 코일을 포함하는 코일 유닛 (도시 생략) 을 가지고, 그 코일 유닛은 한 쌍의 자석 유닛 (49) 사이에 삽입된다. Z 고정자 (47) 의 코일에 공급되는 전류의 크기 및 방향은, 도시되지 않은 주제어장치에 의해 제어되고, 코일 유닛의 코일에 전류가 공급되면, 코일 유닛과 자석 유닛 간의 전자적 상호작용에 의해 발생하는 전자기력 (로렌츠 힘) 에 의해, Z 가동자 (48) (즉 에어 척 유닛 (80)) 가 Z 고정자 (47) (즉 베이스 프레임 (85)) 에 대해 Z-축 방향으로 구동된다. 도시되지 않은 주제어장치는, 4 개의 Z-VCM 을 동기 제어함으로써, 에어 척 유닛 (80) 을 Z-축 방향으로 구동한다 (상하 이동시킨다). 또, 주제어장치는, 4 개의 Z 고정자 (47) 가 갖는 코일 각각에 공급되는 전류의 크기 및 방향을 적절히 제어함으로써, 에어 척 유닛 (80) 을 XY 평면에 대해 임의의 방향으로 요동 (swing) 시킨다 (에어 척 유닛 (80) 을 θx 방향 및 θy 방향으로 구동한다). 이러한 동작에 의해, 정점 스테이지 (40) 는 기판 (P) 의 피노광 부분의 Z-축 방향의 위치 및 θx 및 θy 방향 중 적어도 하나의 위치를 조정한다. 또한, 본 실시형태의 X-축 VCM, Y-축 VCM, 및 Z-축 VCM 각각은, 가동자가 자석 유닛을 갖는 무빙 마그넷식의 보이스 코일 모터이지만, 이것에 한정되지 않고, 가동자가 코일 유닛을 갖는 무빙 코일식의 보이스 코일 모터일 수도 있다. 또, 구동 방식도 로렌츠 힘 구동 방식 이외의 구동 방식일 수도 있다.
이 경우, 4 개의 Z-VCM 각각의 Z 고정자 (47) 가 베이스 프레임 (85) 상에 탑재되어 있기 때문에, 4 개의 Z-VCM 을 이용해 에어 척 유닛 (80) 을 Z-축 방향, 또는 θx 방향 및 θy 방향으로 구동할 때에 Z 고정자 (47) 에 작용하는 구동력의 반력 (reaction force) 은 Y 빔 (33) 에 전달되지 않는다. 따라서, Z-VCM 을 이용해 에어 척 유닛 (80) 을 구동해도, 중량 캔슬러 (42) 의 동작에는 아무런 영향이 없다. 또, Y 빔 (33) 을 갖는 보디 (BD) 에도 구동력의 반력이 전달되지 않기 때문에, Z-VCM 을 이용해 에어 척 유닛 (80) 을 구동해도, 투영 광학계 (PL) 등에 그 구동력의 반력의 영향이 미치지 않는다. 또한, Z-VCM 은 에어 척 유닛 (80) 을 Z-축 방향을 따라 상하 이동시키는 것, 및 XY 평면에 대해 임의의 방향으로 요동시킬 수만 있으면 되기 때문에, 예를 들어 동일 직선 상의 위치에 있지 않은 3 개소에 형성된다면, 3 개여도 된다.
Z-VCM에 의해 구동되는 에어 척 유닛 (80) 의 위치 정보는, 복수, 본 실시형태에서는 예를 들어 4 개의 Z 센서 (86) 를 이용해 구해진다. Z 센서 (86) 는, 4 개의 Z-VCM 에 대응하도록, 중량 캔슬러 (42) 의 +X 측, -X 측, +Y 측, 및 -Y 측에 각각 1 개씩 형성되어 있다 (+Y 측 및 -Y 측의 Z 센서는 도시 생략). 이로써, 본 실시형태에서는, Z-VCM 에 의해 구동되는 피구동물 (여기서는, 에어 척 유닛 (80)) 상에서의 Z-VCM 에 의한 구동점 (구동력의 작용점) 과, Z 센서 (86) 에 의한 계측점이 가깝게 배열되도록 이루어져, 계측점과 구동점과의 사이의 피구동물의 강성이 증가하여, Z 센서 (86) 의 제어성을 증가시킨다. 즉 피구동물에 의한 구동 거리에 대응하는 정확한 계측치를 Z 센서 (86) 가 출력하고, 이에 의해, 위치결정 시간을 감소시킨다. Z 센서 (86) 는, 제어성을 증가시키는 관점에서는, 샘플링 주기도 짧은 것이 바람직하다.
4 개의 Z 센서 (86) 는 실질적으로 같은 센서이다. Z 센서 (86) 는, 에어 척 유닛 (80) 의 베이스 (82) 의 아래쪽 면에 고정된 타겟 (87) 과 함께, Y 빔 (33) 을 기준으로 에어 척 유닛 (80) 의 Z-축 방향의 위치 정보를 획득하는, 예를 들어 정전 용량식 (또는 와전류식) 위치 센서를 구성하고 있다. 도시되지 않은 주제어장치는, 4 개의 Z 센서 (86) 의 출력에 기초하여 에어 척 유닛 (80) 의 Z-축 방향 및 θx 및 θy 각 방향에 관한 위치 정보를 항상 획득해, 그 계측치에 기초하여 4 개의 Z-VCM 을 적절히 제어함으로써 에어 척 유닛 (80) 의 상면의 위치를 제어한다. 이 경우, 에어 척 유닛 (80) 의 최종적인 위치는, 에어 척 유닛 (80) 의 근접 상방을 통과하는 기판 (P) 의 노광 면 (예를 들어, 상면이 되는 레지스트 표면) 이, 항상 투영 광학계 (PL) 의 초점 위치와 실질적으로 일치하도록 (즉, 투영 광학계 (PL) 의 초점 심도 내로 되도록) 제어된다. 도시되지 않은 주제어장치는, 도시 생략의 면 위치 계측계 (오토포커스 장치) 를 이용하여 기판 (P) 의 상면의 위치 (면 위치) 를 모니터링하는 한편, 그 기판 (P) 의 상면이 투영 광학계 (PL) 의 초점 심도 내에 항상 위치하도록 (투영 광학계 (PL) 가 항상 기판 (P) 상면에 포커싱되도록), 에어 척 유닛 (80) 을 높은 제어성을 갖는 Z 센서 (86) 로부터의 위치 정보를 이용해 구동 및 제어한다. 이 경우, 면 위치 계측계 (오토포커스 장치) 는, 노광 영역 (IA) 내에서 Y-축 방향의 위치가 상이한 복수의 계측점을 가지고 있다. 예를 들어, 각 투영 영역 내에 적어도 하나의 계측점이 배치된다. 이 경우, 그 복수의 계측점은, 복수의 투영 영역의 지그재그 모양의 배치에 따라, X-축 방향으로 떨어져 2 열로 배치된다. 따라서, 그 복수의 계측점의 계측치 (면 위치) 에 기초하여, 노광 영역 (IA) 부분의 기판 (P) 표면의 Z-위치에 추가하여, 기판 (P) 의 피칭 (pitching) 량 (θy 회전) 및 롤링 (rolling) 량 (θx 회전) 을 획득할 수가 있다. 또, 면 위치 계측계는, 그 복수의 계측점과는 별도로, 또는 거기에 더해, 노광 영역 (IA) 의 Y-축 방향 (비주사 방향) 의 외측에 계측점을 가질 수 있다. 이 경우, 그 외측에 위치하는 계측점을 포함하는 Y-축 방향의 최외곽에 위치하는 2 개의 계측점의 계측치를 사용함으로써, 롤링량 (θx 회전) 을 보다 정확하게 구하는 것이 가능하게 된다. 또, 면 위치 계측계는, 노광 영역 (IA) 의 외측에 X-축 방향 (주사 방향) 으로 조금 멀어진 위치에 다른 계측점을 가질 수 있다. 이 경우에는, 기판 (P) 의 포커스/레벨링의 이른바 선판독 제어 (read-ahead control) 가 가능하게 된다. 이 외, 면 위치 계측계는, 각 투영 영역 내에 적어도 1 개 배치된 복수의 계측점 대신에 또는 이에 더해, 노광 영역 (IA) 으로부터 X-축 방향 (주사 방향) 으로 멀어진 위치에 Y-축 방향으로 배치된 복수의 계측점 (이 복수의 계측점의 배치 영역은 노광 영역 (IA) 의 Y-축 방향의 위치에 대응한다) 을 가질 수 있다. 이러한 경우에, 노광 개시에 앞서, 예를 들어 얼라인먼트 계측시에, 기판 (P) 의 면 위치의 분포를 사전에 취득하는 포커스 매핑 (focus mapping) 을 수행하는 것이 가능하게 된다. 노광 동안에는, 그 포커스 매핑으로 얻은 정보를 이용해, 기판 (P) 의 포커스/레벨링 제어를 한다. 기판의 포커스 매핑 및 그 포커스 매핑의 정보를 이용한, 노광시 기판의 포커스/레벨링 제어에 대해서는, 예를 들어 미국 특허 출원 공개공보 제 2008/0088843 호 등에 상세하게 개시되어 있다.
또한, Z 센서는, 에어 척 유닛 (80) 의 Z-축 방향 및 θx 및 θy 각 방향에 관한 위치 정보를 구할 수만 있으면 되기 때문에, 예를 들어 동일 직선 상의 위치에 있지 않은 3 개소에 형성되면, Z 센서는 3 개일 수 있다.
복수의 에어 부상 유닛 (50) (본 실시형태에서는, 예를 들어 34 개 유닛) 은, 기판 (P) 이 수평면에 대략 평행하게 유지되도록, 기판 (P) (이 경우에는, 전술한 정점 스테이지 (40) 에 의해 유지되는 기판 (P) 의 피노광 부분을 제외한 영역) 을 하방으로부터 비접촉 지지함으로써, 기판 (P) 에 외부로부터의 진동이 전달되는 것을 방지하거나, 기판 (P) 이 그 자중에 의해 변형 (휨) 및 부서지는 것을 방지하거나, 기판 (P) 의 자중에 의한 Z-축 방향의 기판 (P) 의 휨에 기인해 발생하는, 기판 (P) 의 X 및 Y 각 방향의 치수 오차 (또는 XY 평면 내의 위치 어긋남) 의 발생을 억제하거나 한다.
복수의 에어 부상 유닛 (50) 은, 그 배치 위치가 상이한 것 외에는 실질적으로 동일한 에어 부상 유닛이다. 본 실시형태에서는, 도 2 에 나타나듯이, 정점 스테이지 (40) 의 +Y 측 및 -Y 측에, 예를 들어 각 1 대의 에어 부상 유닛 (50) 이 배치되어, 정점 스테이지 (40) 의 +X 측 및 -X 측 각각에, Y-축 방향을 따라 등간격으로 배열된, 예를 들어 8 대의 에어 부상 유닛 (50) 으로 이루어진 에어 부상 유닛 열이, X-축 방향을 따라 각 2 열 소정 간격으로 배치되어 있다. 즉, 복수의 에어 부상 유닛 (50) 이 정점 스테이지 (40) 의 주위를 둘러싸도록 배치되어 있다. 이하, 4 열의 에어 부상 유닛 열에 대해, 편의상 -X 측으로부터 제 1 내지 제 4 열이라고 지칭하고, 또한, 각 에어 부상 유닛 열을 구성하는 8 대의 에어 부상 유닛에 대해 편의상 -Y 측으로부터 제 1 내지 제 8 유닛으로 지칭하는 것으로 하여 설명한다.
각 에어 부상 유닛 (50) 은, 도 3 에 나타나듯이, 예를 들어 기판 (P) 의 하면에 기체 (예를 들어, 공기) 를 분출하는 본체부 (51), 본체부 (51) 를 하방으로부터 지지하는 지지부 (52), 및 지지부 (52) 를 정반 (12) 상에서 하방으로부터 지지하는 한 쌍의 다리부 (53) 를 포함한다. 본체부 (51) 는, 직육면체 형상의 부재로 이루어지고, 그 상면 (+Z 측의 면) 에 복수의 기체 분출 포트를 가지고 있다. 본체부 (51) 는, 기체 (에어) 를 기판 (P) 의 하면을 향하여 분출함으로써, 기판 (P) 을 부상 지지하고, 기판 (P) 이 XY 평면을 따라 이동할 때, 그 기판 (P) 의 이동을 가이드한다. 복수의 에어 부상 유닛 (50) 각각의 상면은 동일한 XY 평면 상에 위치한다. 또한, 에어 부상 유닛은, 외부에 형성된 도시되지 않은 기체 공급 장치로부터 기체가 공급되도록 구성될 수 있고, 또는, 에어 부상 유닛 자체가, 예를 들어 팬 등의 송기 장치를 가질 수도 있다. 본 실시형태에서는, 도 5(B) 에 나타나듯이, 본체부 (51) 의 상면 (에어 분출면) 과 기판 (P) 의 하면 사이의 거리 Db (클리어런스) 가, 예를 들어 0.8mm 정도가 되도록, 본체부 (51) 로부터 분출되는 기체의 압력 및 유량이 설정된다. 또한, 기체 분출 포트는 기계적 가공에 의해 형성될 수도 있고, 또는, 본체부를 다공질 재료로 형성해, 그 홀을 기체 분출 포트로서 이용할 수도 있다.
지지부 (52) 는, 평면에서 보아 직사각형의 판상 부재로 이루어지고, 그 아래쪽 면이 한 쌍의 다리부 (53) 에 의해 지지된다. 또한, 정점 스테이지 (40) 의 +Y 측 및 -Y 측 각각에 설치된 한 쌍 (2 대) 의 에어 부상 유닛 (50) 의 다리부는, Y 빔 (33) 과 접촉하지 않도록 구성된다 (예를 들어, 역 U-자 형상으로 각각 형성되어 Y 빔 (33) 에 걸쳐 배치되어 있다). 또한, 복수의 에어 부상 유닛의 수 및 그 배치는, 상기 설명으로 예시한 것에 한정되지 않고, 예를 들어 기판 (P) 의 사이즈, 형상, 중량, 및 이동가능 범위, 또는 각 에어 부상 유닛의 성능 등에 따라 적절히 변경될 수 있다. 또, 각 에어 부상 유닛의 지지면 (기체 분출면) 의 형상, 인접하는 에어 부상 유닛 사이의 거리 등도 특별히 한정되지 않는다. 요점은, 에어 부상 유닛은 기판 (P) 이 이동할 수 있는 이동가능 범위의 전체 (또는 이동가능 범위보다 약간 더 넓은 영역) 를 커버하도록 배치되어야 한다.
기판 유지 프레임 (60) 은, 도 2 에 나타나듯이, 평면에서 보아 X-축 방향을 길이 방향으로 하는 직사각형 형상의 외형 형상 (윤곽) 을 가지고, 중앙 부분에 Z-축 방향으로 관통하는 평면시 (planar view) 직사각형 형상의 개구부를 갖는, 두께 방향 치수가 작은 (얇은) 프레임 형상으로 형성되어 있다. 기판 유지 프레임 (60) 은, X-축 방향을 길이 방향으로 하는 XY 평면에 평행한 평판 모양의 부재인 X 프레임 부재 (61x) 를, Y-축 방향으로 소정 간격으로 한 쌍 가지고, Y-축 방향을 길이 방향으로 하는 XY 평면에 평행한 평판 모양의 부재인 Y 프레임 부재 (61y) 에 의해, 한 쌍의 X 프레임 부재 (61x) 의 +X 측 단부들이 접속되어 있고 또한 그 한 쌍의 X 프레임 부재 (61x) 의 -X 측의 단부들이 접속되어 있다. 한 쌍의 X 프레임 부재 (61x) 및 한 쌍의 Y 프레임 부재 (61y) 각각은, 예를 들어 GFRP (Glass Fiber Reinforced Plastics) 등의 섬유 강화 합성 수지 재료, 또는 세라믹스 등과 같은 재료로 형성하는 것이, 강성의 확보 및 경량화의 관점에서 바람직하다.
-Y 측의 X 프레임 부재 (61x) 의 상면에는, -Y 측의 면 상에서 Y-축에 직교하는 반사면을 갖는 Y 이동경 (62y) 이 고정되어 있다. 또, -X 측의 Y 프레임 부재 (61y) 의 상면에는, -X 측 면 상에서 X-축에 직교하는 반사면을 갖는 X 이동경 (62x) 이 고정되어 있다. 기판 유지 프레임 (60) (즉 기판 (P)) 의 XY 평면 내의 위치 정보 (θz 방향의 회전 정보를 포함) 는, X 이동경 (62x) 의 반사면에 계측 빔을 조사하는 복수, 예를 들어 2 대의 X 레이저 간섭계 (63x), 및 Y 이동경 (62y) 의 반사면에 계측 빔을 조사하는 복수, 예를 들어 2 대의 Y 레이저 간섭계 (63y) 를 포함하는 레이저 간섭계 시스템에 의해, 예를 들어 0.25nm정도의 분해능으로 항상 검출된다. X 레이저 간섭계 (63x) 및 Y 레이저 간섭계 (63y) 는, 각각 소정의 고정 부재 (64x 및 64y) 를 통해 보디 (BD) (도 3 에서는 미도시. 도 1 참조) 에 고정된다. 또한, X 레이저 간섭계들 (63x) 및 Y 레이저 간섭계들 (63y) 은 각각, 기판 유지 프레임 (60) 이 이동할 수 있는 이동가능 범위 내에서, 각 간섭계들의 적어도 하나의 간섭계로부터의 계측 빔이 대응하는 이동경에 조사되도록, 그 대수 및 간격이 설정되어 있다. 따라서, 각 간섭계들의 대수는 2 대로 한정되지 않고, 기판 유지 프레임의 이동 스트로크에 따라, 예를 들어 1 대, 또는 3 대 이상일 수 있다. 또, 복수의 계측 빔을 사용하는 경우, 광학계를 복수 마련해 광원이나 제어 유닛이 복수의 계측 빔에 의해 공유되도록 하는 것도 가능하다.
기판 유지 프레임 (60) 은, 기판 (P) 의 단부 (외주 가장자리 부분) 를 하방으로부터 진공 흡착 유지하는 복수, 예를 들어 4 개의 유지 유닛 (65) 을 가진다. 4 개의 유지 유닛 (65) 은, 한 쌍의 X 프레임 부재 (61x) 각각의 서로 대향하는 대향면에 2 개씩, X-축 방향으로 이격되도록 부착되어 있다. 또한, 유지 유닛의 수 및 배치는 전술한 것에 한정되지 않고, 예를 들어 기판의 사이즈, 휘기 쉬움 등에 따라, 필요에 따라 추가의 유지 유닛(들)이 추가적으로 설치될 수 있다. 또, 유지 유닛 (65) 은 Y 프레임 부재에 부착될 수 있다.
도 5(A) 및 도 5(B) 로부터 알 수 있는 바와 같이, 유지 유닛 (65) 은 YZ 단면 L 자 모양으로 형성된 핸드 (hand; 66) 를 가진다. 핸드 (66) 의 기판 재치 면에는, 기판 (P) 을 예를 들어 진공 흡착에 의해 흡착하기 위한 흡착 패드 (67) 가 형성되어 있다. 또, 핸드 (66) 의 상단부에는 조인트 (joint) 부재 (68) 가 형성되어 있고, 이 조인트 부재 (68) 에는 튜브 (도시 생략) 의 일단이 접속되는 한편 그 튜브의 타단은 도시되지 않은 진공 장치에 접속된다. 흡착 패드 (67) 와 조인트 부재 (68) 는, 핸드 (66) 내부에 형성된 배관 부재를 통해 연통되어 있다. 핸드 (66) 와 X 프레임 부재 (61x) 의 서로 대향하는 대향면에는 각각 돌출한 돌출부 (69a) 가 형성되어 있고, 그 서로 대향하는 한 쌍의 돌출부 (69a) 간에는, XY 평면에 평행하고 Z-축 방향으로 이격된 한 쌍의 판 스프링 (69) 이 복수의 볼트 (69b) 를 통해 가설되어 있다. 즉, 핸드 (66) 와 X 프레임 부재 (61x) 는 평행판 스프링에 의해 접속되어 있다. 따라서, 핸드 (66) 는, X 프레임 부재 (61x) 에 대해 X-축 방향 및 Y-축 방향에서, 판 스프링 (69) 의 강성으로 인해 그 위치가 구속되는 반면, Z-축 방향 (수직 방향) 에 관해서는, 판 스프링 (69) 의 탄성으로 인해 θx 방향으로 회전하는 일 없이 Z-축 방향으로 변위 (상하 이동) 할 수 있다.
여기서, 핸드 (66) 의 하단면 (-Z 측 단면) 은, 한 쌍의 X 프레임 부재 (61x) 및 한 쌍의 Y 프레임 부재 (61y) 각각의 하단면 (-Z 측 단면) 아래로 -Z 측으로 돌출하고 있다. 그러나, 핸드 (66) 의 기판 재치 면의 두께 T 는, 에어 부상 유닛 (50) 의 기체 분출 면과 기판 (P) 의 하면 사이의 거리 Db (본 실시형태에서는, 예를 들어 0.8mm정도) 보다 작게 (예를 들어, 0.5mm 정도로) 설정되어 있다. 따라서, 핸드 (66) 의 기판 재치 면의 아래쪽 면과 복수의 에어 부상 유닛 (50) 의 상면 사이에는, 예를 들어 0.3mm 정도의 클리어런스가 형성되어, 기판 유지 프레임 (60) 이 복수의 에어 부상 유닛 (50) 상을 XY 평면에 평행하게 이동할 때, 핸드 (66) 와 에어 부상 유닛 (50) 은 접촉하지 않는다. 또한, 도 6(A) 내지 도 6(C) 에 나타나듯이, 기판 (P) 의 노광 동작 동안, 핸드 (66) 는 정점 스테이지 (40) 의 상방을 통과하지 않고, 따라서, 핸드 (66) 와 에어 척 유닛 (80) 역시 접촉하지 않는다. 또한, 핸드 (66) 의 기판 재치면부는, 전술한 바와 같이 두께가 얇기 때문에 Z-축 방향의 강성이 낮지만, 기판 (P) 과 접촉하는 부분 (XY 평면에 평행한 평면부) 의 면적을 넓게 할 수 있기 때문에, 흡착 패드를 대형화할 수 있고, 기판의 흡착력이 향상된다. 또, 핸드 자체의 XY 평면에 평행한 방향의 강성을 확보할 수 있다.
구동 유닛 (70) 은, 도 3 에 나타나듯이, 정반 (12) 상에 고정된 X 가이드 (71) 와, X 가이드 (71) 에 탑재되어 X 가이드 (71) 상을 X-축 방향으로 이동가능한 X 가동부 (72) 와, X 가동부 (72) 에 탑재된 Y 가이드 (73) 와, Y 가이드 (73) 에 탑재되어 Y 가이드 (73) 상을 Y-축 방향으로 이동가능한 Y 가동부 (74) 를 가지고 있다. 기판 유지 프레임 (60) 은, 도 2 에 나타나듯이, +X 측의 Y 프레임 부재 (61y) 가 Y 가동부 (74) 에 고정되어 있다.
X 가이드 (71) 는, 도 2 에 나타나듯이, 정점 스테이지 (40) 의 -X 측으로서, 제 3 및 제 4 번째의 에어 부상 유닛 열 각각을 구성하는 제 4 번째의 에어 부상 유닛 (50) 과 제 5 번째의 에어 부상 유닛 (50) 의 사이에 배치되어 있다. 또, X 가이드 (71) 는, 제 4 번째의 에어 부상 유닛 열 너머 +X 측으로 연장되어 있다. 또한, 도 3 에서는, 도면의 복잡을 피하기 위한 관점에서, 에어 부상 유닛 (50) 의 도시가 일부 생략되어 있다. X 가이드 (71) 는, X-축 방향을 길이 방향으로 하는 XZ 평면에 평행한 판상의 부재로 이루어진 본체부 (71a) 와, 본체부 (71a) 를 정반 (12) 상에서 지지하는 복수, 예를 들어 3 개의 지지대 (71b) 를 가지고 있다 (도 1 참조). 본체부 (71a) 는, 그 상면이 복수의 에어 부상 유닛 (50) 각각의 지지부 (52) 보다 하방에 위치하도록, 그 Z-축 방향의 위치가 설정되어 있다.
본체부 (71a) 의 +Y 측의 측면, -Y 측의 측면, 및 상면 (+Z 측의 면) 에는, 도 1 에 나타나듯이, 각각 X-축에 평행하게 연장되어 형성된 X 리니어 가이드 (75) 가 고정되어 있다. 또, 본체부 (71a) 의 +Y 측 및 -Y 측 각각의 측면에는, X-축 방향을 따라 배열된 복수의 자석을 포함하는 자석 유닛 (76) 이 고정되어 있다 (도 3 참조).
X 가동부 (72) 는, 도 1 에 나타나듯이, YZ 단면이 역 U 자 모양의 부재로 이루어지고, 그 부재의 한 쌍의 대향면 사이에 전술한 X 가이드 (71) 가 삽입되어 있다. X 가동부 (72) 의 내측 면 (천정면 및 서로 대향하는 한 쌍의 대향면) 에는, 각각 단면이 U 자 모양으로 형성된 슬라이더 (77) 가 고정되어 있다. 슬라이더 (77) 는, 도시되지 않은 롤링 엘리먼트 (예를 들어, 볼 (ball), 스키드 (skid) 등) 를 가지며, X 리니어 가이드 (75) 에 대해 슬라이드 가능한 상태로 X 리니어 가이드 (75) 와 걸어맞춤 (끼워 맞춤) 되어 있다. 또, X 가동부 (72) 의 한 쌍의 대향면 각각에는, 코일을 포함하는 코일 유닛 (78) 이, X 가이드 (71) 에 고정된 자석 유닛 (76) 에 대향하도록 고정되어 있다. 한 쌍의 코일 유닛 (78) 은, 한 쌍의 자석 유닛 (76) 과의 전자기적 상호작용에 의해 X 가동부 (72) 를 X 가이드 (71) 상에서 X-축 방향으로 구동하는 전자기력 구동 방식에 의한 X 리니어 모터를 구성한다. 코일 유닛 (78) 의 코일에 공급되는 전류의 크기 및 방향은, 도시되지 않은 주제어장치에 의해 제어된다. X 가동부 (72) 의 X-축 방향에 관한 위치 정보는, 도시 생략의 리니어 인코더 시스템 또는 광 간섭계 시스템에 의해 고정밀도로 계측된다.
X 가동부 (72) 의 상면에는, Z-축에 평행한 샤프트 (79) 의 일단 (하단) 이 고정되어 있다. 샤프트 (79) 는, 도 1 에 나타나듯이, 제 4 번째의 에어 부상 유닛 열을 구성하는 제 4 번째의 에어 부상 유닛 (50) 과 제 5 번째의 에어 부상 유닛 (50) 사이를 통과해 각 에어 부상 유닛 (50) 의 상면 (기체 분출면) 너머 +Z 측으로 연장되어 있다. 샤프트 (79) 의 타단 (상단) 은, Y 가이드 (73) 의 아래쪽 면 중앙에 고정되어 있다 (도 3 참조). 따라서, Y 가이드 (73) 는 에어 부상 유닛 (50) 의 상면보다 상방에 배치되어 있다. Y 가이드 (73) 는, Y-축 방향을 길이 방향으로 하는 판상 부재로 이루어지고, 그 내부에 Y-축 방향을 따라 배열된 복수의 자석을 포함하는 도시되지 않은 자석 유닛을 가지고 있다. 여기서, Y 가이드 (73) 는, 복수의 에어 부상 유닛 (50) 의 상방에 배치되어 있기 때문에, Y 가이드 (73) 의 아래쪽 면이 에어 부상 유닛 (50) 으로부터 분출되는 에어에 의해 지지를 받음으로써, Y 가이드 (73) 는, 예를 들어 그 Y-축 방향 양 단부의 자중으로 인한 하방 휨이 방지된다. 따라서, 상기 하방 휨을 방지하기 위한 강성을 확보할 필요가 없고, Y 가이드 (73) 의 경량화를 도모할 수 있다.
Y 가동부 (74) 는, 도 3 에 나타나듯이, 내부에 공간을 갖는 높이 방향 치수 가 작은 (얇은) 박스 형상 부재로 이루어지고, Y 가동부 (74) 의 아래쪽 면에는, 샤프트 (79) 의 통과를 허용하는 개구부가 형성되어 있다. 또, Y 가동부 (74) 는, +Y 측 및 -Y 측의 측면에도 개구부를 가지고 있어, 그 개구부를 통해 Y 가동부 (74) 내에 Y 가이드 (73) 가 삽입되어 있다. 또, Y 가동부 (74) 는, Y 가이드 (73) 에 대한 대향면에 도시되지 않은 비접촉 트러스트 베어링, 예를 들어 에어 베어링을 가지고 있고, Y 가동부 (74) 는 Y 가이드 (73) 상을 비접촉 상태로 Y-축 방향으로 이동가능하게 되어 있다. 기판 (P) 을 유지하기 위한 기판 유지 프레임 (60) 은 Y 가동부 (74) 에 고정되어 있기 때문에, 전술한 정점 스테이지 (40) 및 복수의 에어 부상 유닛 (50) 각각에 대해 비접촉 상태로 되어 있다.
또, Y 가동부 (74) 는 그 내부에 코일을 포함하는 코일 유닛 (도시 생략) 을 가지고 있다. 코일 유닛은, Y 가이드 (73) 가 갖는 자석 유닛과의 전자기적 상호작용에 의해, Y 가동부 (74) 를 Y 가이드 (73) 상에서 Y-축 방향으로 구동하는 전자기력 구동 방식의 Y 리니어 모터를 구성한다. 코일 유닛의 코일에 공급되는 전류의 크기 및 방향은 도시 생략의 주제어장치에 의해 제어된다. Y 가동부 (74) 의 Y-축 방향에 관한 위치 정보는, 도시 생략의 리니어 인코더 시스템 또는 광 간섭계 시스템에 의해 고정밀도로 계측된다. 또한, 상기 서술한 X 리니어 모터, 및 Y 리니어 모터 각각은 무빙 마그넷식 또는 무빙 코일식 중 어느 것이어도 되고, 그 구동 방식도 로렌츠 힘 구동 방식으로 한정되지 않고, 가변 자기저항 구동 방식 등의 그 밖의 방식일 수 있다. 또, 상기 서술한 X 가동부를 X-축 방향으로 구동하는 구동 장치, 및 상기 서술한 Y 가동부를 Y-축 방향으로 구동하는 구동 장치로서는, 예를 들어, 요구되는 기판의 위치결정 정밀도, 스루풋 (throughput), 기판의 이동 스트로크 등에 따라, 예를 들어 볼 스크류, 또는 랙-앤드-피니언 (rack-and-pinion) 등을 포함하는 일축 구동 장치를 이용할 수도 있고, 또는, 예를 들어 와이어, 벨트 등을 이용해 X 가동부 및 Y 가동부를 끌어 각각 X-축 방향 및 Y-축 방향으로 X 가동부 및 Y 가동부를 구동하는 장치를 사용할 수도 있다. .
또, 액정 노광 장치 (10) 는, 그 밖에도 투영 광학계 (PL) 의 바로 아래에 위치하는 기판 (P) 의 표면 (상면) 의 면 위치 정보 (Z-축, θx 및 θy 각 방향의 위치 정보) 를 계측하는 면 위치 계측계 (도시 생략) 를 가지고 있다. 면 위치 계측계로서는, 예를 들어, 미국 특허 제 5,448,332 호 등에 개시되는 것 같은 경사 입사 방식의 것을 사용할 수 있다.
상기 서술한 바와 같이 구성된 액정 노광 장치 (10) (도 1 참조) 에서는, 도시 생략의 주제어장치의 제어 아래, 도시 생략의 마스크 로더 (loader) 에 의해 마스크 스테이지 (MST) 상으로의 마스크 (M) 의 로드가 행해지고, 도시 생략의 기판 로더에 의해 기판 스테이지 장치 (PST) 상으로의 기판 (P) 의 로드가 행해진다. 그 후, 주제어장치는, 도시 생략의 얼라인먼트 검출계를 이용해 얼라인먼트 계측을 실행하고, 얼라인먼트 계측의 종료 후, 스텝-앤드-스캔 방식의 노광 동작이 행해진다.
도 6(A) 내지 도 6(C) 에는, 상기 노광 동작시에 있어서의 기판 스테이지 장치 (PST) 의 동작의 일례가 나타나 있다. 또한, 이하에서는, 기판 (P) 의 +Y 측 영역 및 -Y 측 영역에, X-축 방향을 길이 방향으로 하는 직사각형 형상의 쇼트 (shot) 영역이 하나씩 설정된, 이른바 단일 기판 상의 2 디스플레이의 경우에 대해 설명한다. 도 6(A) 에 나타나듯이, 노광 동작은, 기판 (P) 의 -X 측에 위치한 -Y 측 영역으로부터 기판 (P) 의 +X 측에 위치한 -Y 측의 영역을 향해 수행된다. 이러한 동작 시에, 구동 유닛 (70) 의 X 가동부 (72) (도 1 등 참조) 가 X 가이드 (71) 상에서 -X 방향으로 구동됨으로써, 기판 (P) 이 노광 영역 (IA) 에 대해 -X 방향으로 구동되고 (도 6(A) 의 흑화살표 참조), 기판 (P) 의 -Y 측의 영역에 주사 동작 (노광 동작) 이 수행된다. 이어서, 기판 스테이지 장치 (PST) 상에서, 도 6(B) 에 나타나듯이, 구동 유닛 (70) 의 Y 가동부 (74) 가 Y 가이드 (73) 상에서 -Y 방향으로 구동됨으로써 (도 6(B) 의 흰색 화살표 참조), 스텝 동작이 수행된다. 이 후, 도 6(C) 에 나타나듯이, 구동 유닛 (70) 의 X 가동부 (72) (도 1 등 참조) 가 X 가이드 (71) 상에서 +X 방향으로 구동됨으로써, 기판 (P) 이 노광 영역 (IA) 에 대해 +X 방향으로 구동되고 (도 6(C) 의 흑화살표 참조), 기판 (P) 의 +Y 측의 영역에서 주사 동작 (노광 동작) 이 수행된다.
주제어장치는, 도 6(A) 내지 도 6(C) 에 도시된 스텝-앤드-스캔 방식의 노광 동작을 하고 있는 중, 간섭계 시스템 및 면 위치 계측계를 이용해 항상 기판 (P) 의 XY 평면 내의 위치 정보, 및 기판 (P) 표면의 피노광 부분의 면 위치 정보를 계측하고, 그 계측치에 기초하여 4 개의 Z-VCM 을 적절히 제어함으로써, 정점 스테이지 (40) 에 의해 유지되는 부분의 면 위치, 즉 투영 광학계 (PL) 의 바로 아래에 위치하는 피노광 부분의 면 위치 (Z-축 방향 및 θx 및 θy 각 방향의 위치) 를 투영 광학계 (PL) 의 초점 심도 내에 위치하도록 조정 (위치결정) 한다. 이로써, 본 실시형태의 액정 노광 장치 (10) 가 갖는 기판 스테이지 장치 (PST) 에서는, 예를 들어 기판 (P) 의 표면에 굴곡이 있거나 기판 (P) 에 두께의 오차가 있는 경우에도, 확실하게 기판 (P) 의 피노광 부분의 면 위치를 투영 광학계 (PL) 의 초점 심도 내에 위치시킬 수가 있어 노광 정밀도를 향상시킬 수 있다.
또, 정점 스테이지 (40) 에 의해 기판 (P) 의 면 위치가 조정될 때, 기판 (P) 의 동작 (Z-축 방향에 대한 이동 또는 틸트 (tilt) 동작) 에 추종해, 기판 유지 프레임 (60) 의 핸드 (66) 가 Z-축 방향으로 변위한다. 이로써, 기판 (P) 의 파손, 핸드 (66) 와 기판 (P) 사이의 시프트 (shift) (흡착 에러) 등이 방지된다. 또한, 복수의 에어 부상 유닛 (50) 은, 에어 척 유닛 (80) 에 비해, 기판 (P) 을 보다 높게 부상시키기 때문에, 기판 (P) 과 복수의 에어 부상 유닛 (50) 사이의 에어 강성은, 에어 척 유닛 (80) 과 기판 (P) 사이의 에어 강성에 비해 낮다. 따라서, 기판 (P) 은 별 어려움 없이 복수의 에어 부상 유닛 (50) 상에서 자세를 변경할 수 있다. 또, 기판 유지 프레임 (60) 이 고정된 Y 가동부 (74) 는 Y 가이드 (73) 에 비접촉 지지를 받고 있기 때문에, 기판 (P) 의 자세 변화량이 크고 핸드 (66) 가 기판 (P) 을 추종할 수 없는 경우에는, 기판 유지 프레임 (60) 자체의 자세가 변화함으로써, 상기 흡착 에러 등을 회피할 수 있다. 또한, Y 가이드 (73) 와 X 가동부 (72) 사이의 체결부 강성을 낮게 해, 기판 유지 프레임 (60) 과 함께 전체 Y 가이드 (73) 의 자세가 변화하는 구성일 수도 있다.
또, 기판 스테이지 장치 (PST) 에서는, 복수의 에어 부상 유닛 (50) 에 의해 거의 수평으로 부상 지지를 받는 기판 (P) 이, 기판 유지 프레임 (60) 에 의해 유지된다. 그 다음, 기판 스테이지 장치 (PST) 에서는, 구동 유닛 (70) 에 의해 기판 유지 프레임 (60) 이 구동됨으로써, 기판 (P) 이 수평면 (XY 이차원 평면) 을 따라 안내됨과 함께, 기판 (P) 의 피노광 부분 (노광 영역 (IA) 내의, 기판 (P) 의 일부) 의 면 위치가, 정점 스테이지 (40) 에 의해 핀포인트 방식으로 제어된다. 이와 같이, 기판 스테이지 장치 (PST) 에서, 기판 (P) 을 XY 평면을 따라 안내하는 장치인 구동 유닛 (70) (XY 스테이지 장치) 과, 기판 (P) 을 거의 수평으로 유지하고 또한 기판 (P) 의 Z-축 방향의 위치결정을 실시하는 장치인 복수의 에어 부상 유닛 (50) 및 정점 스테이지 (40) (Z/레벨링 스테이지 장치) 가 서로 독립적인 별개의 몸체로 되어 있으므로, XY 이차원 스테이지 장치 상에서, 기판 (P) 을 평면도 좋게 유지하는 데 이용되는, 기판 (P) 과 동일한 정도의 면적을 갖는 테이블 부재 (기판 홀더) 를 Z-축 방향 및 틸트 방향으로 각각 구동하는 (기판과 함께 Z/레벨링 스테이지도 XY 이차원 구동된다) 종래의 스테이지 장치 (예를 들어, PCT 국제 공개공보 제 2008/129762 호 (대응 미국 특허 출원 공개공보 제 2010/0018950 호) 참조) 에 비해, 기판 스테이지 장치 (PST) 의 중량 (특히 가동 부분의 중량) 을 상당히 저감할 수 있다. 구체적으로는, 예를 들어 한 변이 3m 를 초과하는 대형의 기판을 사용하는 경우, 종래의 스테이지 장치에서는, 가동 부분의 총 중량이 10t 까지 되는데 대해, 본 실시형태의 기판 스테이지 장치 (PST) 에서는, 가동 부분 (기판 유지 프레임 (60), X 가동부 (72), Y 가이드 (73), 및 Y 가동부 (74) 등) 의 총 중량을 수백 kg 정도로 감소시킬 수 있다. 따라서, 예를 들어 X 가동부 (72) 를 구동하기 위한 X 리니어 모터 및 Y 가동부 (74) 를 구동하기 위한 Y 리니어 모터는 각각 작은 출력의 리니어 모터일 수 있고, 이는 런닝 코스트 (running cost) 를 저감할 수 있도록 한다. 또, 전원 설비 등의 인프라스트럭쳐 (infrastructure) 도 별 어려움 없이 마련될 수 있다. 또, 리니어 모터의 출력이 작아도 되기 때문에, 초기 비용도 저감할 수 있다.
또, 구동 유닛 (70) 에서, 기판 유지 프레임 (60) 을 유지하는 Y 가동부 (74) 가, Y 가이드 (73) 에 의해 비접촉 지지를 받고, 기판 (P) 이 XY 평면을 따라 안내되므로, 플로어 면 (F) 상에 설치된 정반 (12) 측으로부터 에어 베어링을 통해 전달되는 Z-축 방향의 진동 (외란) 이 기판 유지 프레임 (60) 의 제어에 악영향을 미칠 우려는 적다. 따라서, 기판 (P) 의 자세가 안정되어, 노광 정밀도가 향상된다.
또, 구동 유닛 (70) 의 Y 가동부 (74) 가, Y 가이드 (73) 에 의해 비접촉 상태로 지지를 받고 먼지가 발생되는 것이 방지되므로, Y 가이드 (73) 및 Y 가동부 (74) 가 복수의 에어 부상 유닛 (50) 의 상면 (기체 분출면) 보다 상방에 배치되어 있음에도 불구하고, 기판 (P) 의 노광 처리에 영향을 미치지 않는다. 한편, X 가이드 (71) 및 X 가동부 (72) 는, 에어 부상 유닛 (50) 보다 하방에 배치되어 있으므로, 먼지가 발생하는 경우에도, 먼지가 노광 처리에 영향을 미칠 가능성이 낮다. 하지만, 예를 들어 에어 베어링 등을 이용해 X 가이드 (71) 에 대해 X 가동부 (72) 를 비접촉 상태로 X-축 방향으로 이동가능하게 지지시킬 수 있다.
또, 정점 스테이지 (40) 의 중량 캔슬러 (42) 및 에어 척 유닛 (80) 은, 정반 (12) 으로부터 진동 측면에서 분리된 Y 빔 (33) 상에 탑재되어 있으므로, 예를 들어 구동 유닛 (70) 을 이용해 기판 유지 프레임 (60) (기판 (P)) 을 구동할 때 발생하는 구동력의 반력, 진동 등이 중량 캔슬러 (42) 및 에어 척 유닛 (80) 에 전달되지 않는다. 따라서, Z-VCM 을 사용한 에어 척 유닛 (80) 의 위치 (즉, 기판 (P) 의 피노광 부분의 면 위치) 의 제어를 고정밀도로 수행할 수가 있다. 또, 에어 척 유닛 (80) 을 구동하는 4 개의 Z-VCM 은, Z 고정자 (47) 가 Y 빔 (33) 과 비접촉으로 된 베이스 프레임 (85) 에 고정되어 있으므로, 에어 척 유닛 (80) 을 구동할 때 발생하는 구동력의 반력이, 중량 캔슬러 (42) 에 전해지지 않는다. 따라서, 에어 척 유닛 (80) 의 위치를 고정밀도로 제어할 수 있다.
또, 기판 유지 프레임 (60) 의 위치 정보를 기판 유지 프레임 (60) 에 고정된, 즉 최종적인 위치결정 제어의 대상물인 기판 (P) 에 근접해 배치된 이동경 (62x 및 62y) 을 사용하는 간섭계 시스템으로 계측하므로, 제어 대상 (기판 (P)) 과 계측점 사이의 강성을 높게 유지할 수 있다. 즉, 최종적인 위치를 알아야 하는 기판과 계측점을 일체로 간주할 수가 있기 때문에, 계측 정밀도가 향상된다. 또, 기판 유지 프레임 (60) 의 위치 정보를 직접 계측하므로, X 가동부 (72) 및 Y 가동부 (74) 에 직선 운동 오차가 발생하는 경우에도,계측 결과는 거의 영향을 받지 않는다.
또, 에어 척 유닛 (80) 의 본체부 (81) 의 상면 (기판 유지면) 의 X-축 방향의 사이즈가 노광 영역 (IA) 의 X-축 방향의 사이즈보다 길게 설정되므로, 기판 (P) 의 피노광 부분 (노광 예정 부분) 이 노광 영역 (IA) 보다 기판 (P) 의 이동 방향의 상류 측에 위치한 상태에서, 특히 주사 노광 개시 직전에, 기판 (P) 의 등속 이동 수행 전의 가속 단계에서, 그 기판 (P) 의 피노광 부분의 면 위치를 미리 조정할 수 있다. 따라서, 노광 개시부터 확실하게 기판 (P) 의 피노광 부분의 면 위치를 투영 광학계 (PL) 의 초점 심도 내에 위치시킬 수가 있어, 노광 정밀도를 향상시킬 수 있다.
또, 기판 스테이지 장치 (PST) 는, 정반 (12) 상에 복수의 에어 부상 유닛 (50), 정점 스테이지 (40), 및 구동 유닛 (70) 이 평면적으로 나란히 배치되는 구성이므로, 조립, 조정, 및 메인터넌스 (maintenance) 등이 용이하다. 또, 부재의 수가 적고 또한 각 부재가 경량이므로 수송도 용이하다.
또한, 예를 들어, 기판 (P) 의 +X 측 단부 또는 -X 측의 단부가 정점 스테이지 (40) 의 상방을 통과할 때 등의 경우에, 에어 척 유닛 (80) 의 일부에만 기판 (P) 이 겹치는 상태 (에어 척 유닛 (80) 이 기판 (P) 으로 완전하게 덮이지 않은 상태) 가 된다. 이와 같은 경우에는, 에어 척 유닛 (80) 의 상면에 작용하는 기판 (P) 의 하중이 감소하기 때문에, 에어의 밸런스가 무너져 에어 척 유닛 (80) 의 기판 (P) 을 부상시키는 힘이 약해지고, 에어 척 유닛 (80) 과 기판 (P) 사이의 거리 Da (도 5(B) 참조) 가 원하는 값 (예를 들어 0.02mm) 보다 작아지게 된다. 이와 같은 경우에, 주제어장치는, 에어 척 유닛 (80) 의 상면과 기판 (P) 의 하면과의 거리 Da 가 항상 일정한 원하는 값을 유지할 수 있도록, 기판 (P) 의 위치에 따라 (기판 (P) 과 유지면이 중첩되는 면적에 따라) 에어 척 유닛 (80) 과 기판 (P) 아래쪽 면 사이의 에어 압력 및/또는 에어 유량 (본체부 (81) 가 분출 및 흡인하는 에어의 압력 및/또는 유량) 을 제어한다. 에어의 압력 및/또는 유량을 기판 (P) 의 위치에 따라 어느 정도로 설정할 것인가는 미리 실험에 의해 구해 두는 것이 바람직하다. 또, 에어 척 유닛 (80) 의 상면을 X-축 방향을 따라 복수의 영역으로 분할하고, 분할된 각 영역에 대해, 분출 및 흡인되는 에어의 유량 및/또는 압력을 제어할 수 있게 하는 것도 가능하다. 또, 기판 (P) 과 에어 척 유닛 (80) 간의 위치 관계 (기판 (P) 과 유지면이 중첩되는 면적) 에 따라, 에어 척 유닛 (80) 을 상하 이동시킴으로써, 에어 척 유닛 (80) 의 상면과 기판 (P) 의 하면 사이의 거리가 적절히 조정될 수 있다.
- 제 2 실시형태
다음으로, 제 2 실시형태의 액정 노광 장치에 대해 설명한다. 본 제 2 실시형태의 액정 노광 장치는, 기판 (P) 을 유지하는 기판 스테이지 장치의 구성이 상이한 점을 제외하고는, 전술한 제 1 실시형태의 액정 노광 장치 (10) 와 동일한 구성을 가지고 있기 때문에, 이하에서는, 기판 스테이지 장치의 구성만 설명한다. 여기서, 중복 설명을 피하는 관점에서, 상기 제 1 실시형태와 동등의 기능을 갖는 부재에 대해서는, 상기 제 1 실시형태와 같은 부호로 표시하고, 그 설명을 생략한다.
도 7(A) 에 나타나듯이, 제 2 실시형태에 관련된 기판 스테이지 장치 (PST2) 는, 기판 유지 프레임 (260) 의 구성이 제 1 실시형태와 다르다. 이하, 차이점에 대해 설명한다. 기판 유지 프레임 (260) 은, 제 1 실시형태와 마찬가지로, 기판 (P) 을 둘러싸는 직사각형 형상의 프레임 형상으로 형성되어 있고, 한 쌍의 X 프레임 부재 (261x) 와 한 쌍의 Y 프레임 부재 (261y) 를 가지고 있다. 또한, 도 7(A) 에서는, X 이동경 및 Y 이동경의 도시가 생략되어 있다 (각각 도 2 참조).
제 1 실시형태의 기판 유지 프레임 (60) (도 5(A) 참조) 이 단면 L 자 모양의 핸드에 의해 기판 (P) 을 하방으로부터 흡착 유지하는 반면, 제 2 실시형태의 기판 유지 프레임 (260) 의 경우에는, -X 측의 Y 프레임 부재 (261y) 에 압축 코일 스프링 (263) 을 개재하여 장착 한 쌍의 프레싱 (pressing) 부재 (264), 및 +Y 측의 X 프레임 부재 (261x) 에 압축 코일 스프링 (263) 을 개재하여 장착된 하나의 프레싱 부재 (264) 가, +X 측의 Y 프레임 부재 (261y) 에 고정된 한 쌍의 기준 부재 (266) 및 -Y 측의 X 프레임 부재 (261x) 에 고정된 하나의 기준 부재 (266) 에 대해 각각 기판 (P) 을 가압함으로써 (기판 (P) 에 XY 평면에 평행한 프레싱력을 작용시킴으로써) 기판 유지 프레임 (260) 이 기판 (P) 을 유지한다. 따라서, 제 1 실시형태와 달리, 기판 (P) 은, 프레임 형상의 부재인 기판 유지 프레임 (260) 의 개구 안에 수용된다 (도 7(B) 참조). 기판 (P) 은, 도 7(B) 에 나타나듯이, 그 아래쪽 면이 기판 유지 프레임 (260) 의 아래쪽 면과 거의 동일 평면 상에 있도록 배치된다. 또한, 프레싱 부재 및 기준 부재의 수는, 예를 들어 기판의 사이즈 등에 따라 적절히 변경될 수 있다. 또, 기판을 프레싱하는 프레싱 부재는 압축 코일 스프링에 한정되지 않고, 에어 실린더 또는 모터를 사용한 슬라이드 유닛일 수도 있다.
또, 제 2 실시형태에 관련된 기판 스테이지 장치 (PST2) 에서는, 도 7(B) 에 나타나듯이, X 가동부 (72) 에 샤프트 (79) 를 개재하여 고정된 평판 모양의 부재인 Y 가이드 (273) 의 상면에, X-축 방향으로 소정 간격으로 배치된 한 쌍의 Y 리니어 가이드 (90) 가 고정되어 있다. 또, 한 쌍의 Y 리니어 가이드 (90) 의 사이에는, Y-축 방향을 따라 배열된 복수의 자석을 포함하는 자석 유닛 (91) 이 고정되어 있다. 한편, Y 가동부 (274) 는, XY 평면에 평행한 평판 모양의 부재로 이루어지고, Y 가동부 (274) 의 아래쪽 면에는, 단면이 역 U 자 모양으로 각각 형성된 복수, 예를 들어 4 개의 슬라이더 (92) (도 7(B) 참조. 4 개의 슬라이더 (92) 중, +Y 측의 2 개는 도시 생략) 이 고정되어 있다. 4 개의 슬라이더 (92) 는 각각 도시되지 않은 롤링 엘리먼트 (예를 들어 볼, 스키드 등) 를 가지고, +X 측의 Y 리니어 가이드 (90) 및 -X 측의 Y 리니어 가이드 (90) 에 각 2 개의 슬라이더 (92) 가, 대응하는 Y 리니어 가이드 (90) 에 대해 각각 슬라이드 가능한 상태로 걸어맞춤되어 있다. 또, Y 가동부 (274) 의 아래쪽 면에는, 코일을 포함하는 코일 유닛 (93) (도 7(B) 참조) 이 Y 가이드 (273) 에 고정된 자석 유닛 (91) 에 대향하도록 고정되어 있다. 코일 유닛 (93) 과 자석 유닛 (91) 은, 전자기적 상호작용에 의해 Y 가동부 (274) 를 Y 가이드 (273) 상에서 Y-축 방향으로 구동하는 전자기력 구동 방식의 Y 리니어 모터를 구성하고 있다. 또한, Y 리니어 모터를 구성하는 코일 유닛 및 자석 유닛의 배치는 전술한 배치와 역일 수 있다.
또, 제 2 실시형태에 있어서, Y 가동부 (274) 및 기판 유지 프레임 (260) 은 힌지 장치 (299) 에 의해 접속되어 있다. 힌지 장치 (299) 는, Y 가동부 (274) 와 기판 유지 프레임 (260) 의 수평면 (XY 평면) 을 따른 상대 이동을 제한하는 한편, 힌지 장치 (299) 는 θx 방향 및 θy 방향을 포함하는 XY 평면에 평행한 소정의 축선 회전 방향으로의 상대 이동을 허용한다. 따라서, Y 가동부 (274) 와 기판 유지 프레임 (260) 은, XY 평면을 따라 일체적으로 이동하지만, 정점 스테이지 (40) 에 의해 기판 (P) 이 XY 평면에 대해 기울여진 경우에는, 기판 (P) 의 경사에 따라 기판 유지 프레임 (260) 만이 XY 평면에 대해 기울므로, Y 리니어 가이드 (90) 및 슬라이더 (92) 에는 부하가 걸리지 않는다.
이상 설명한 제 2 실시형태에 관련된 기판 스테이지 장치 (PST2) 의 기판 유지 프레임 (260) 은, 기판 (P) 을 포함해, X 프레임 부재 (261x) 및 Y 프레임 부재 (261y) 의 아래쪽 면보다 하방으로 돌출한 돌출부를 가지지 않기 때문에, 기판 유지 프레임 (260) 의 아래쪽 면과 복수의 에어 부상 유닛 (50) 의 상면 (기체 분출면) 을 제 1 실시형태에 비해 접근시키는 것이 가능하다. 따라서, 에어 부상 유닛 (50) 에 의한 기판 (P) 의 부상 높이를 낮게 할 수 있어, 에어 부상 유닛 (50) 으로부터 분출되는 에어의 유량을 저감할 수 있다. 따라서, 런닝 코스트 (running cost) 를 저감할 수 있다. 또, 기판 유지 프레임 (260) 은, 그 아래쪽 면에 돌출부를 갖지 않기 때문에, 한 쌍의 X 프레임 부재 (261x) 및 한 쌍의 Y 프레임 부재 (261y) 가 각각 에어 척 유닛 (80) 상을 통과할 수 있다. 따라서, 예를 들어 기판 (P) 을 도시 생략의 기판 교환 위치, 얼라인먼트 계측 위치 등으로 안내할 때 이용되는 기판 (P) 의 이동 경로를 자유롭게 설정할 수 있다.
- 제 3 실시형태
다음으로 제 3 실시형태에 대해 설명한다. 제 3 실시형태의 액정 노광 장치는, 기판 (P) 을 유지하는 기판 스테이지 장치의 구성이 상이한 점을 제외하고는, 전술한 제 1 및 제 2 실시형태의 액정 노광 장치의 각각의 구성과 동일한 구성을 가지고 있기 때문에, 이하에서는, 기판 스테이지 장치의 구성만 설명한다. 또한, 전술한 제 1 및 제 2 실시형태와 동일한 기능을 갖는 부재는, 전술한 제 1 및 제 2 실시형태에서의 부호와 같은 부호에 의해 표시되고, 그 설명을 생략한다.
도 8 에 나타나듯이, 본 제 3 실시형태에 관련된 기판 스테이지 장치 (PST3) 에서, 구동 유닛 (370) 은, 상기 제 1 실시형태와 달리, 한 쌍의 X 가이드 (71) 를 가지고 있다. 한 쌍의 X 가이드 (71) 는, 서로 평행하게 Y-축 방향으로 소정 간격으로 배치되어 있다. 한 쌍의 X 가이드 (71) 중 일방 (-Y 측) 은, 제 3 및 제 4 번째의 에어 부상 유닛 열을 구성하는 제 2 번째의 에어 부상 유닛 (50) 과 제 3 번째의 에어 부상 유닛 (50) 사이에 배치되고, 타방 (+Y 측) 은, 제 6 번째의 에어 부상 유닛 (50) 과 제 7 번째의 에어 부상 유닛 (50) 사이에 배치되어 있다. 한 쌍의 X 가이드 (71) 의 각각 상에는, X 가동부 (72) (X 가동부 (72) 는 도 8 에서는 도시 생략. 도 1 및 도 3 참조) 가 탑재되어 있다. 한 쌍의 X 가동부 (72) 는, 도시되지 않은 주제어장치에 의해, 각각의 대응하는 X 가이드 (71) 상에서 동기 구동된다. 또, Y 가이드 (73) 는, 한 쌍의 X 가동부 (72) 상에 제 1 실시형태와 마찬가지로 샤프트 (79) (샤프트 (79) 는 도 8 에서는 도시 생략. 도 1 및 도 3 참조) 를 통해 지지를 받음으로써, 한 쌍의 X 가동부 (72) 에 걸쳐 가설되어 있다.
제 3 실시형태에 관련된 기판 스테이지 장치 (PST3) 에서는, Y 가이드 (73) 가, Y-축 방향으로 이격된 2 지점에서 X 가동부 (72) 에 의해 지지를 받으므로, 예를 들어, Y 가동부 (74) 가 Y 가이드 (73) 상의 +Y 측 단부 또는 -Y 측의 단부 근방에 위치하는 경우에, Y 가이드 (73) 의 단부들의 일방의 하방 휘어짐이 억제되는 등에 의해, Y 가이드 (73) 의 자세가 안정될 수 있도록 한다. 따라서, 기판 (P) 을 Y-축 방향으로 긴 스트로크로 안내하기 위해 Y 가이드 (73) 를 길게 하는 경우 등에 특히 유효하다.
또한, 제 3 실시형태의 기판 스테이지 장치 (PST3) 에서는, X 가이드 (71) 의 일방이 정점 스테이지 (40) 의 -Y 측에 배치되고, X 가이드 (71) 의 타방이 정점 스테이지 (40) 의 +Y 측에 배치되며, 따라서, 한 쌍의 X 가이드 (71) 의 각각은, 정반 (12) 의 -X 측 단부 근방까지 연장되어 설치될 수 있다 (이 경우, 한 쌍의 X 가이드 (71) 는, Y 빔 (33) 및 정점 스테이지 (40) 의 +Y 측 및 -Y 측의 에어 부상 유닛 (50) 각각과 접촉하지 않도록 구성된다). 이 경우, 기판 유지 프레임 (60) 을 정점 스테이지 (40) 너머 -X 측으로 안내하는 것이 가능 (예를 들어 정반 (12) 의 -X 측 단부보다 -X 측으로 안내하는 것도 가능) 하게 된다. 이와 같이, 기판 (P) 의 XY 평면 내의 이동가능 범위를 증가시킬 수 있기 때문에, 구동 유닛 (370) 을 이용해 기판 (P) 을, 노광 위치와 다른 위치 (예를 들어 기판 교환 위치, 얼라인먼트 계측 위치 등) 로 이동시킬 수 있다. 또한, 본 제 3 실시형태에서는, 한 쌍 (2 개) 의 X 가이드 (71) 가 형성되어 있지만, X 가이드의 수는 이것에 한정되지 않고 3 개 이상일 수도 있다.
- 제 4 실시형태
다음으로 제 4 실시형태에 대해 도 9 및 도 10 을 참조하여 설명한다. 제 4 실시형태의 액정 노광 장치는, 기판 스테이지 장치의 구성이 상이한 점을 제외하고는 제 1, 제 2 및 제 3 실시형태의 액정 노광 장치의 각각의 구성과 동일한 구성을 가지고 있기 때문에, 이하에서는, 기판 스테이지 장치의 구성만 설명한다. 또한, 전술한 제 1 내지 제 3 실시형태와 동일한 기능을 갖는 것에 대해서는, 전술한 제 1 내지 제 3 실시형태와 같은 참조 부호로 표시하고, 그 설명을 생략한다.
도 9 에 나타나듯이, 본 제 4 실시형태에 관련된 기판 스테이지 장치 (PST4) 의 기판 유지 프레임 (460) 은, X-축 방향을 길이 방향으로 하는 한 쌍의 X 프레임 부재 (61x) 와, Y-축 방향을 길이 방향으로 하는 한 쌍의 Y 프레임 부재 (61y) 로 이루어진 프레임 형상으로 형성되어 있다. 그리고, -X 측의 Y 프레임 부재 (61y) 의 -X 측의 측면 (외측면) 에 X 이동경 (462x) 이 고정되고, -Y 측의 X 프레임 부재 (61x) 의 -Y 측의 측면 (외측면) 에 Y 이동경 (462y) 이 고정되어 있다. X 이동경 (462x) 및 Y 이동경 (462y) 은, 간섭계 시스템이 기판 유지 프레임 (460) 의 XY 평면 내의 위치 정보를 계측할 때에 사용된다. 또한, 한 쌍의 X 프레임 부재 (61x) 및 한 쌍의 Y 프레임 부재 (61y) 를 각각, 예를 들어 세라믹으로 형성하는 경우에는, -X 측의 Y 프레임 부재 (61y) 의 -X 측의 측면 (외측면), 및 -Y 측의 X 프레임 부재 (61x) 의 -Y 측의 측면 (외측면) 각각을 경면 가공해 반사면으로 할 수 있다.
구동 유닛 (470) 에서, 전술한 제 3 실시형태의 기판 스테이지 장치 (PST3) (도 8 참조) 와 마찬가지로, 한 쌍의 X 가동부 (72) 에 걸쳐 Y 가이드 (73) 가 가설되어 있다. 그리고, 도 9 에 나타나듯이, Y 가이드 (73) 상에는, 한 쌍의 Y 가동부 (474) 가 각각 Y 리니어 모터 (도시 생략) 에 의해 Y-축 방향으로 이동가능하게 비접촉 상태로 지지를 받고 있다. 한 쌍의 Y 가동부 (474) 는 Y-축 방향으로 소정 간격으로 배치되어 Y 리니어 모터에 의해 동기 구동된다. 또한, 도 10 에서, +Y 측의 Y 가동부 (474) 가 -Y 측의 Y 가동부 (474) 에 대해 지면 깊이 방향으로 숨어 있지만, 한 쌍의 Y 가동부 (474) 는 실질적으로 같은 구성을 가지고 있다 (도 9 참조). 기판 유지 프레임 (460) 에서, +X 측의 Y 프레임 부재 (61y) 가 한 쌍의 Y 가동부 (474) 에 체결되어 있다.
이상 설명한 제 4 실시형태에 관련된 기판 스테이지 장치 (PST4) 에서는, 기판 유지 프레임 (460) 은 한 쌍의 Y 가동부 (474) 에 의해, Y-축 방향으로 이격한 2 개소에서 지지를 받으므로, 그 자중으로 인한 휘어짐 (특히 +Y 측 및 -Y 측의 단부의 휘어짐) 이 억제될 수 있다. 또, 이러한 구성으로, 기판 유지 프레임 (460) 의 수평면에 평행한 방향의 강성이 향상되므로, 기판 유지 프레임 (460) 에 의해 유지되는 기판 (P) 의 수평면에 평행한 방향의 강성 또한 향상되어, 기판 (P) 의 위치 결정 정밀도가 향상된다.
또, 기판 유지 프레임 (460) 을 구성하는 X 프레임 부재 (61x) 및 Y 프레임 부재 (61y) 의 측면에 각각 이동경 (462x 및 462y) 이 형성되어 있고, 더욱 구체적으로는, 기판 유지 프레임 (460) 그 자체가 반사면을 가지므로, 기판 유지 프레임 (460) 을 경량화 및 소형화할 수 있어, 기판 유지 프레임 (460) 의 위치 제어성이 향상된다. 또, 이동경 (462x 및 462y) 의 반사면의 Z-축 방향의 위치가, 기판 (P) 의 표면의 Z-축 방향의 위치에 가깝게 되므로, 이른바 아베 오차 (Abbe error) 의 발생을 억제할 수 있어, 기판 (P) 의 위치 결정 정밀도가 향상된다.
- 제 5 실시형태
다음으로 제 5 실시형태에 대해 도 11 및 도 12 를 참조하여 설명한다. 제 5 실시형태의 액정 노광 장치는, 기판 스테이지 장치의 구성이 상이한 점을 제외하고는, 제 1 내지 제 4 실시형태의 액정 노광 장치의 각각의 구성과 동일한 구성을 가지기 때문에, 이하에서는, 기판 스테이지 장치의 구성만 설명한다. 또한, 전술한 제 1 내지 제 4 실시형태와 동일한 기능을 갖는 것에 대해서는, 전술한 제 1 내지 제 4 실시형태와 같은 참조 부호로 표시하고, 그 설명을 생략한다.
도 11 에 나타나듯이, 제 5 실시형태에 관련된 기판 스테이지 장치 (PST5) 에서, Y 가이드 (73) 에 의해 하나의 Y 가동부 (574) 가 Y 리니어 모터 (도시 생략) 에 의해 Y-축 방향으로 이동가능하도록 비접촉 상태로 지지를 받고 있다. 또, 도 12 에 나타나듯이, Y 가동부 (574) 는, -X 측의 측면에, XZ 단면이 U 자 모양으로 형성된 부재로 각각 이루어진 한 쌍의 유지 부재 (591) 를 가지고 있다. 한 쌍의 유지 부재 (591) 는, Y-축 방향을 따라 소정 간격으로 배치되어 있다. 한 쌍의 유지 부재 (591) 의 각각은, 서로 대향하는 한 쌍의 대향면에, 예를 들어 에어 베어링 등의 비접촉 트러스트 베어링을 가지고 있다. 또, 기판 유지 프레임 (560) 은, +X 측에 Y 프레임 부재 (561y) 가 XZ 단면 L 자 모양으로 형성되어 있고, Y 프레임 부재 (561y) 의 +X 측의 단부는 한 쌍의 유지 부재 (591) 의 각각의 한 쌍의 대향면 사이에 삽입됨으로써, Y 가동부 (574) 에 비접촉 유지되어 있다. 또한, 한 쌍의 유지 부재 (591) 에 형성된 비접촉 트러스트 베어링으로서는, 예를 들어, 자기 베어링 등을 이용할 수 있다.
도 11 에 나타나듯이, Y 가동부 (574) 의 상면에는, 고정 부재 (575) 를 개재하여 하나의 Y 고정자 (576y) 와 한 쌍의 X 고정자 (576x) 가 고정되어 있다. Y 고정자 (576y) 는, 평면에서 보아 한 쌍의 유지 부재 (591) 사이에 위치하고 있다. 한 쌍의 X 고정자 (576x) 는 Y-축 방향으로 이격하고 있고, 각각 평면에서 보아 +Y 측의 유지 부재 (591) 의 +Y 측, 및 -Y 측의 유지 부재 (591) 의 -Y 측에 위치하고 있다. Y 고정자 (576y) 및 한 쌍의 X 고정자 (576x) 는 각각 코일을 포함하는 코일 유닛 (도시 생략) 을 가지고 있다. 코일 유닛의 코일에 공급되는 전류의 크기 및 방향은 도시되지 않은 주제어장치에 의해 제어된다.
또한, 기판 유지 프레임 (560) 의 +X 측의 Y 프레임 부재 (561y) 의 상면에는, 전술한 Y 고정자 (576y) 및 한 쌍의 X 고정자 (576x) 에 대응하도록, 하나의 Y 가동자 (577y) 및 한 쌍의 X 가동자 (577x) 가 각각 고정 부재 (578) (도 12 참조, 한 쌍의 X 가동자 (577x) 를 각각 지지하는 고정 부재는 도시 생략) 를 개재하여 고정되어 있다. 하나의 Y 가동자 (577y) 및 한 쌍의 X 가동자 (577x) 의 각각은 XZ 단면 U 자 모양으로 형성되어, 서로 대향하는 한 쌍의 대향면을 가지고, 그 한 쌍의 대향면 사이에, 대응하는 Y 고정자 (576y) 또는 X 고정자 (576x) 가 삽입되어 있다 (도 12 참조). 하나의 Y 가동자 (577y) 및 한 쌍의 X 가동자 (577x) 각각은, 서로 대향하는 한 쌍의 대향면에 자석을 포함하는 자석 유닛 (579) (도 12 참조. 한 쌍의 X 가동자의 자석 유닛 (577x) 은 도시 생략) 을 가지고 있다. Y 가동자 (577y) 가 갖는 자석 유닛 (579) 은, Y 고정자 (576y) 가 갖는 코일 유닛과의 전자기적 상호작용에 의해, 기판 유지 프레임 (560) 을 Y-축 방향으로 미소 구동 (도 11의 화살표 참조) 하는 전자기력 구동 방식의 Y 보이스 코일 모터 (Y-VCM) 를 구성한다. 또, 한 쌍의 X 가동자 (577x) 가 갖는 자석 유닛은, 각각 대응하는 X 고정자 (576x) 가 갖는 코일 유닛과의 전자기적 상호작용에 의해, 기판 유지 프레임 (560) 을 X-축 방향으로 미소 구동 (도 11의 화살표 참조) 하는 한 쌍의 전자기력 구동 방식의 X 보이스 코일 모터 (X-VCM) 를 구성한다. 기판 유지 프레임 (560) 과 Y 가동부 (574) 는, Y-VCM 및 한 쌍의 X-VCM 에 의해 발생하는 전자기력에 의해 전자기적으로 비접촉 상태로 결합되어, 일체적으로 XY 평면을 따라 이동한다. 또한, 기판 유지 프레임 (560) 의 측면에는, 전술한 제 4 실시형태와 마찬가지로, X 이동경 (462x) 및 Y 이동경 (462y) 이 각각 고정되어 있다.
제 5 실시형태에 관련된 기판 스테이지 장치 (PST5) 에서, 주제어장치는, 예를 들어 노광 동작시 등에, 도시 생략의 리니어 인코더 시스템의 계측치에 기초하여, X 리니어 모터 및 Y 리니어 모터를 이용해 X 가동부 (72) 및 Y 가동부 (574) 의 위치를 제어함으로써, 기판 유지 프레임 (570) (기판 (P)) 의 XY 평면 내의 대체적인 위치 결정을 수행하고, 또한, 간섭계 시스템의 계측치에 기초하여, Y-VCM 및 한 쌍의 X-VCM 을 적절히 제어해 기판 유지 프레임 (570) 을 XY 평면을 따라 미소 구동함으로써, 기판 (P) 의 XY 평면 내의 최종적인 위치 결정을 수행한다. 이러한 동작 시에, 주제어장치는 한 쌍의 X-VCM 의 출력을 적절히 제어함으로써, 기판 유지 프레임 (560) 을 θz 방향으로도 구동한다. 즉, 기판 스테이지 장치 (PST5) 에서는, 한 쌍의 X 가이드 (71), X 가동부 (72), Y 가이드 (73), 및 Y 가동부 (574) 로 이루어지는 XY 이차원 스테이지 장치가 이른바 조동 (coarse movement) 스테이지 장치로서 기능해, Y-VCM 및 한 쌍의 X-VCM 에 의해 Y 가동부 (574) 에 대해 미소 구동되는 기판 유지 프레임 (560) 이, 이른바 미동 스테이지 장치로서 기능한다.
전술한 바와 같이, 제 5 실시형태에 관련된 기판 스테이지 장치 (PST5) 에 의하면, 기판 (P) 의 XY 평면 내의 위치 결정을 경량인 기판 유지 프레임 (570) 을 이용해 Y 가동부 (574) 에 대해 고정밀도로 실시할 수가 있으므로, 기판 (P) 의 위치 결정 정밀도 및 위치 결정 속도가 향상된다. 한편, X 리니어 모터에 의한 X 가동부 (72) 의 위치 결정 정밀도 및 Y 리니어 모터에 의한 Y 가동부 (574) 의 위치 결정 정밀도는 나노 오더 (nano-order) 의 정밀도가 요구되지 않기 때문에, 비싸지 않은 리니어 모터 및 비싸지 않은 리니어 인코더 시스템을 사용할 수 있다. 또, 기판 유지 프레임 (560) 과 Y 가동부 (574) 는 진동 면에서 분리되어 있으므로, 수평 방향의 진동과 X-VCM 및 Y-VCM 의 구동력의 반력이 기판 유지 프레임 (560) 에 전해지지 않는다.
- 제 6 실시형태
다음으로 제 6 실시형태에 대해 도 13 을 참조하여 설명한다. 제 6 실시형태의 액정 노광 장치는, 기판 스테이지 장치의 구성이 상이한 점을 제외하고는 제 1 내지 제 5 실시형태의 액정 노광 장치의 각각의 구성과 동일한 구성을 가지고 있기 때문에, 이하에서는, 기판 스테이지 장치의 구성만 설명한다. 또한, 전술한 제 1 내지 제 5 실시형태와 동일한 기능을 갖는 것에 대해서는, 전술한 제 1 내지 제 5 실시형태와 같은 참조 부호로 표시하고, 그 설명을 생략한다.
도 13 에 나타나듯이, 제 6 실시형태에 관련된 기판 스테이지 장치 (PST6) 의 구동 유닛 (670) 은, 정점 스테이지 (40) 의 +X 측의 영역에 전술한 제 5 실시형태와 동일한 구성의 XY 이차원 스테이지 장치를 가지고 있다. 더욱 구체적으로, 정반 (12) 상에 고정된 한 쌍의 X 가이드 (71) 와, 그 한 쌍의 X 가이드 (71) 상을 X-축 방향으로 이동하는 한 쌍의 X 가동부 (72) (도 13 에서는 도시 생략. 도 12 참조) 와, 한 쌍의 X 가동부 (72) 에 걸쳐 가설된 Y 가이드 (73) 와, 그 Y 가이드 (73) 상을 Y-축 방향으로 이동하는 Y 가동부 (574) (편의상, 제 1 의 Y 가동부 (574) 로 칭한다) 로 이루어진 XY 이차원 스테이지가, 정점 스테이지 (40) 의 +X 측의 영역에 형성되어 있다. 제 1 의 Y 가동부 (574) 는, 전술한 제 5 실시형태와 동일한 구성의 기판 유지 프레임 (660) 을 비접촉 유지하는 한 쌍의 유지 부재 (591) 를 갖는다. 또, 기판 유지 프레임 (660) 은, 전술한 제 5 실시형태와 동일한 구성의 Y 가동부 (574) 에 고정된 Y 고정자 및 한 쌍의 X 고정자, 그리고 기판 유지 프레임 (660) 의 +X 측의 Y 프레임 부재 (661y) 에 고정된 Y 가동자 및 한 쌍의 X 가동자로 구성되는 3 개의 보이스 코일 모터 (하나의 Y-VCM 및 한 쌍의 X-VCM) 에 의해, 제 1 의 Y 가동부 (574) 에 대해 X-축 방향, Y-축 방향, 및 θz 방향으로 미소 구동된다.
기판 스테이지 장치 (PST6) 는 또한, 정점 스테이지 (40) 의 -X 측의 영역에도, 전술한 XY 이차원 스테이지 장치와 같은 (단 Y-축에 대해 대칭 (지면상 좌우 대칭) 인) 구성을 갖는, 보다 구체적으로는, 한 쌍의 X 가이드 (71), 한 쌍의 X 가동부 (72) (도 13 에서는 도시 생략. 도 12 참조), Y 가이드 (73), 및 Y 가동부 (574) (편의상 제 2 의 Y 가동부 (574) 로 칭한다) 로 이루어진 또 다른 XY 이차원 스테이지 장치를 가지고 있다. 기판 유지 프레임 (660) 은, +X 측의 Y 프레임 부재 (661y) 와 마찬가지로 단면 L 자 모양으로 형성된 (도 12 참조) -X 측의 Y 프레임 부재 (661y) 를 갖고, 그 -X 측의 Y 프레임 부재 (661y) 는, 제 2 의 Y 가동부 (574) 가 갖는 한 쌍의 유지 부재 (591) 에 의해 비접촉 유지되어 있다.
또, 기판 유지 프레임 (660) 은, 제 2 의 Y 가동부 (574) 에 고정된 Y 고정자 및 한 쌍의 X 고정자, 그리고 기판 유지 프레임 (660) 의 -X 측의 Y 프레임 부재 (661y) 에 고정된 Y 가동자 및 한 쌍의 X 가동자로 구성되는 3 개의 보이스 코일 모터 (하나의 Y-VCM 및 한 쌍의 X-VCM) 에 의해, 제 2 의 Y 가동부 (574) 에 대해 X-축 방향, Y-축 방향, 및 θz 방향으로 미소 구동된다. 도시 생략의 주제어장치는, 도시 생략의 리니어 인코더 시스템의 계측치에 기초하여, 정점 스테이지 (40) 의 +X 측 및 -X 측 각각의 X 리니어 모터 및 Y 리니어 모터를 동기 제어해, 기판 유지 프레임 (660) 의 XY 평면 내의 위치를 대략적으로 조정함과 함께, 기판 유지 프레임 (660) (기판 (P)) 의 +X 측 및 -X 측 각각의 Y-VCM 및 한 쌍의 X-VCM 을 간섭계 시스템의 계측치에 기초하여 적절히 제어해, 기판 유지 프레임을 X-축, Y-축, 및 θz 의 각 방향으로 미소 구동해, 기판 유지 프레임 (660) (기판 (P)) 의 XY 평면 내의 위치를 미세 조정한다.
제 6 실시형태에 관련된 기판 스테이지 장치 (PST6) 에서, 기판 유지 프레임 (660) 의 X-축 방향의 양단부가 XY 이차원 스테이지 장치에 의해 지지를 받으므로, 기판 유지 프레임 (660) 의 자중으로 인한 휘어짐 (자유단측의 처짐) 이 억제된다. 또, 기판 유지 프레임 (660) 에 +X 측 및 -X 측 각각으로부터 보이스 코일 모터에 의한 구동력이 작용되기 때문에, 기판 유지 프레임 (660) 및 기판 (P) 으로 이루어지는 계의 중력 중심 위치 근방에 각 보이스 코일 모터의 구동력을 작용시킬 수 있다. 따라서, 기판 유지 프레임 (660) 에 θz 방향의 모멘트가 작용하는 것을 억제할 수 있다. 또한, 기판 유지 프레임 (660) 의 중력 중심 위치를 X-VCM 이 구동하도록, 기판 유지 프레임 (660) 의 -X 측과 +X 측에 X-VCM 이 각각 1 개씩 대각 위치에 (대각 선의 중심이 기판 (P) 의 중력 중심 근방에 위치하도록) 배치하는 것만으로도 가능하다.
- 제 7 실시형태
다음으로 제 7 실시형태에 대해 도 14 및 도 15 를 참조하여 설명한다. 제 7 실시형태의 액정 노광 장치는, 기판 스테이지 장치의 구성이 상이한 점을 제외하고는, 제 1 내지 제 6 실시형태의 액정 노광 장치와 동일한 구성을 가지고 있기 때문에, 이하에서는, 기판 스테이지 장치의 구성만 설명한다. 또한, 전술한 제 1 내지 제 6 실시형태와 동일한 기능을 갖는 것에 대해서는, 전술한 제 1 내지 제 6 실시형태와 같은 참조 부호로 표시하고, 그 설명을 생략한다.
도 14 에 나타나듯이, 기판 스테이지 장치 (PST7) 는, 기판 유지 프레임 (760) 을 XY 이차원 평면을 따라 구동하는 구동 유닛 (770) 의 구성이 전술한 제 1 내지 제 6 실시형태의 각각에 관련된 기판 스테이지 장치와 다르다. 기판 스테이지 장치 (PST7) 에서는, 제 1 번째의 에어 부상 유닛 열과 제 2 번째의 에어 부상 유닛 열 사이 및 제 3 번째의 에어 부상 유닛 열과 제 4 번째의 에어 부상 유닛 열 사이에 각각 Y-축 방향을 길이 방향으로 하여 한 쌍의 Y 가이드 (771) 가 Y-축 방향으로 소정 간격으로 배치되어 있다. 이들 4 개의 Y 가이드 (771) 는, 전술한 제 1 내지 제 6 실시형태의 각각에 관련된 기판 스테이지 장치가 갖는 X 가이드 (71) (도 3 참조) 와 동일한 기능을 갖는다. 또, 도 15 에 나타나듯이, 4 개의 Y 가이드 (771) 각각에는, 전술한 제 1 내지 제 6 실시형태의 각각에 관련된 기판 스테이지 장치가 갖는 X 가동부 (72) (도 3 참조) 와 동일한 기능을 갖는 Y 가동부 (772) 가 탑재되어 있다 (-X 측의 2 개의 Y 가동부 (772) 는 도시 생략). 4 개의 Y 가동부 (772) 는, 각 Y 가이드 (771) 가 갖는 Y 고정자 (776) (도 15 참조) 및 각 Y 가동부 (772) 가 갖는 Y 가동자 (도시 생략) 로 이루어지는 전자기력 구동 방식의 Y 리니어 모터에 의해 Y-축 방향으로 동기 구동된다.
+Y 측의 2 개의 Y 가동부 (772) 간에는, 도 14 에 나타나듯이, X-축 방향을 길이 방향으로 하는 평판 모양의 부재로 이루어진 X 가이드 (773) 가 샤프트 (779) (도 15 참조) 를 개재하여 가설되어 있다. 그리고, -Y 측의 2 개의 Y 가동부 (772) 간에도, 동일한 X 가이드 (773) 가 가설되어 있다. 한 쌍의 X 가이드 (773) 의 각각에는, 예를 들어 전술한 제 1 실시형태의 기판 스테이지 장치가 갖는 Y 가동부 (74) (도 2 참조) 에 상당하는 부재인 X 가동부 (774) 가 탑재되어 있다. 한 쌍의 X 가동부 (774) 는, 각 X 가이드 (773) 가 갖는 X 고정자 (도시 생략) 와 각 X 가동부 (774) 가 갖는 X 가동자 (도시 생략) 로 이루어지는 전자기력 구동 방식의 X 리니어 모터에 의해 X-축 방향으로 동기 구동된다. 한 쌍의 X 가동부 (774) 는 각각 전술한 제 6 실시형태에 관련된 기판 스테이지 장치 (도 13 참조) 의 Y 가동부 (574) 가 갖는 유지 부재 (591) 와 마찬가지로, 에어 베어링 등과 같은 비접촉 트러스트 베어링 (도시 생략) 을 이용해 기판 유지 프레임 (760) 을 비접촉 유지하는 유지 부재 (791) 를 가지고 있다. 이상의 구성에 의해, 제 7 실시형태에 관련된 기판 스테이지 장치 (PST7) 는, 전술한 제 1 내지 제 6 실시형태에 관련된 각 기판 스테이지 장치에 비해, 기판 유지 프레임 (760) 을 X-축 방향으로 긴 스트로크로 이동시킬 수 있다.
또, 기판 유지 프레임 (760) 은, 기판 유지 프레임 (760) 의 +Y 측에 배치된 X-VCM 및 Y-VCM, 그리고, 기판 유지 프레임 (760) 의 -Y 측에 배치된 X-VCM 및 Y-VCM 에 의해, 필요에 따라 X-축, Y-축 및 θz 의 각 방향으로 미소 구동된다. X-VCM 및 Y-VCM 의 구성은, 전술한 제 6 실시형태의 X-VCM 및 Y-VCM 의 구성과 동일하다. 여기서, 기판 유지 프레임 (760) 의 +Y 측 상에, X-VCM 은 Y-VCM의 -X 측에 배치되고, 기판 유지 프레임 (760) 의 -Y 측 상에, X-VCM 은 Y-VCM의 +X 측에 배치된다. 또, 2 개의 X-VCM 은 대각 위치에 배치되고, 2 개의 Y-VCM 은 기판 유지 프레임 (760) 에 대해 대각 위치에 (대각 선의 중심이 기판 (P) 의 중력 중심 근방에 위치하도록) 배치되어 있다. 따라서, 전술한 제 6 실시형태와 마찬가지로, 기판 (P) 을 중력 중심에서 구동 (그 중력 중심 위치 근방에 구동력을 작용시켜 구동) 할 수 있다. 따라서, 한 쌍의 X-VCM 및/또는 한 쌍의 Y-VCM 을 이용해 기판 유지 프레임 (760) 을 X-축 방향, Y-축 방향, 및 θz 방향으로 미소 구동할 때, 기판 (P) 을 기판 유지 프레임 (760) 과 기판 (P) 으로 이루어지는 계의 중력 중심 위치 근방을 중심으로 회전시킬 수 있다.
또, X-VCM 및 Y-VCM 각각은, 기판 유지 프레임 (760) 의 상면보다 +Z 측으로 돌출한 구성을 갖지만 (도 15 참조), X-VCM 및 Y-VCM 이 투영 광학계 (PL) (도 15 참조) 의 +Y 측 및 -Y 측에 위치하고 있기 때문에, 기판 유지 프레임 (760) 이 투영 광학계 (PL) 와 간섭하는 일 없이, 기판 유지 프레임 (760) 을 투영 광학계 (PL) 아래를 통과해 X-축 방향으로 이동시킬 수 있다.
또, 기판 스테이지 장치 (PST7) 는, 정점 스테이지 (40) 의 +X 측의 영역에서, 제 4 번째의 에어 부상 유닛 열의 +X 측에 위치된, Y-축 방향으로 소정 간격으로 배열된 6 대의 에어 부상 유닛 (50) 으로 이루어진 제 5 번째의 에어 부상 유닛 열을 가지고 있다. 그리고, 제 4 번째의 에어 부상 유닛 열의 3 내지 6 번째의 에어 부상 유닛 (50), 및 제 5 번째의 에어 부상 유닛 열의 2 내지 4 번째의 에어 부상 유닛 (50) 은 각각, 도 15 에 나타나듯이, Z-축 방향으로 이동 (상하 이동) 가능한 본체부 (51) (도 15 참조) 를 갖는다. 이하, 전술한 상하 이동가능한 본체부 (51) 를 각각 갖는 에어 부상 유닛 (50) 을, 고정된 본체부 (51) 를 각각 갖는 다른 에어 부상 유닛 (50) 과 구별하기 위해, 편의상 에어 부상 유닛 (750) 으로 칭한다. 복수 (본 실시형태에서는, 예를 들어 8 개) 의 에어 부상 유닛 (750) 각각의 다리부 (752) 는, 도 15 에 나타나듯이, 정반 (12) 상에 고정된 원통형 케이스 (752a) 와, 일단이 케이스 (752a) 의 내부에 수용되고 타단이 지지부 (52) 에 고정되어 케이스 (752a) 에 대해, 예를 들어 에어 실린더 장치 등의 도시되지 않은 일축 액츄에이터에 의해 Z-축 방향으로 구동되는 샤프트 (752b) 를 포함하고 있다.
도 14 로 돌아와, 제 7 실시형태에 관련된 기판 스테이지 장치 (PST7) 에서는, 제 4 및 제 5 번째의 에어 부상 유닛 열의 +Z 측에 기판 교환 위치가 설정되어 있다. 기판 (P) 에 대한 노광 처리의 종료 후, 도시되지 않은 주제어장치는, 도 14 에 나타나는 기판 (P) 의 하방 (-Z 측) 에 제 4 및 제 5 번째의 에어 부상 유닛 열의 에어 부상 유닛 (750) 이 위치하는 상태로, 기판 유지 프레임 (760) 의 유지 유닛 (65) 을 사용한 기판 (P) 의 흡착 유지를 해제해, 그 상태로 8 개의 에어 부상 유닛 (750) 각각을 동기 제어해, 기판 (P) 을 기판 유지 프레임 (760) 으로부터 분리해 기판 (P) 을 +Z 방향으로 이동시킨다 (도 15 참조). 기판 (P) 은, 도 15 에 나타나는 위치에서, 도시되지 않은 기판 교환 장치에 의해 기판 스테이지 장치 (PST7) 로부터 반출되어, 그 후에, 도시되지 않은 새로운 기판이 도 15 에 나타나는 위치에 반송된다. 그 새로운 기판은, 8 개의 에어 부상 유닛 (750) 에 의해 하방으로부터 비접촉 지지를 받은 상태로, -Z 방향으로 이동된 후, 기판 유지 프레임 (760) 에 의해 흡착 유지된다. 또한, 기판 (P) 을 기판 교환 장치에 의해 반출 및 반입할 때, 또는 기판 (P) 을 기판 유지 프레임 (760) 에 전달할 때, 기판 (P) 과 에어 부상 유닛 (750) 은 비접촉 상태 대신에 접촉 상태일 수 있다.
이상 설명한 기판 스테이지 장치 (PST7) 에서는, 복수의 에어 부상 유닛 (750) 의 본체부 (51) 가 Z-축 방향으로 이동가능하게 구성되어 있으므로, 기판 유지 프레임 (760) 을 XY 평면을 따라 기판 교환 위치의 하방에 위치시킴으로써, 기판을 기판 유지 프레임 (760) 으로부터 분리해, 그 기판 (P) 만을 별 어려움 없이 기판 교환 위치로 이동시킬 수 있다.
- 제 8 실시형태
다음으로 제 8 실시형태에 대해 도 16 을 참조하여 설명한다. 제 8 실시형태의 액정 노광 장치는, 기판 스테이지 장치의 구성이 상이한 점을 제외하고는, 제 1 내지 제 7 실시형태의 액정 노광 장치의 각각의 구성과 동일한 구성을 가지기 때문에, 이하에서는, 기판 스테이지 장치의 구성만 설명한다. 또한, 전술한 제 1 내지 제 7 실시형태와 동일한 기능을 갖는 것에 대해서는, 전술한 제 1 내지 제 7 실시형태와 같은 참조 부호로 표시하고, 그 설명을 생략한다.
도 16 에 나타나듯이, 제 8 실시형태에 관련된 기판 스테이지 장치 (PST8) 의 기판 유지 프레임 (860) 은, X-축 방향을 길이 방향으로 하는 판상 부재로 각각 이루어진 X 프레임 부재 (861x) 를, Y-축 방향으로 소정 간격으로 이격된 상태로 한 쌍 가져, 그 한 쌍의 X 프레임 부재 (861x) 각각의 -X 측 단부가, Y-축 방향을 길이 방향으로 하는 판상 부재로 이루어진 Y 프레임 부재 (861y) 에 접속되어 있다. 따라서, 기판 유지 프레임 (860) 은, 평면에서 보아 +X 측이 개방된 U자 모양의 외형 형상 (윤곽) 을 가지고 있다. 따라서, 기판 유지 프레임 (860) 의 복수의 유지 유닛 (65) 에 의한 흡착 유지가 해제된 상태에서는, 기판 (P) 은, 기판 유지 프레임 (860) 에 대해 +X 방향으로 이동함으로써, 기판 유지 프레임 (860) 의 +X 측의 단부에 형성된 개구부를 통과하는 것이 가능하게 되어 있다. 또한, 노광 동작시 등에 기판 유지 프레임 (860) 을 XY 평면을 따라 안내하는 구동 유닛 (770) (XY 이차원 스테이지 장치) 의 구성은, 전술한 제 7 실시형태의 구성과 같다.
또, 제 8 실시형태의 기판 스테이지 장치 (PST8) 는, 정점 스테이지 (40) 의 +X 측에서, 제 4 번째의 에어 부상 유닛 열의 +X 측에, Y-축 방향으로 소정 간격으로 배열된 6 개의 에어 부상 유닛 (50) 으로 이루어진 제 5 번째의 에어 부상 유닛 열을 가지고 있다. 또, 기판 스테이지 장치 (PST8) 는, 플로어 면 (F) (도 1 및 도 3 참조) 상에 있어서의 정반 (12) 의 +X 측의 영역에, Y-축 방향으로 소정 간격으로 배열된 4 개의 에어 부상 유닛 (50) 으로 각각 이루어진 에어 부상 유닛 열을, X-축 방향으로 소정 간격으로 2 열 가지고 있다. 2 열의 에어 부상 유닛 열을 구성하는 합계 8 개의 에어 부상 유닛 (50) 각각의 상면 (기체 분출면) 은, 정반 (12) 상의 복수의 에어 부상 유닛 (50) 의 상면과 동일 평면상에 (공면으로) 배치되어 있다.
제 8 실시형태에 관련된 기판 스테이지 장치 (PST8) 에서는, 기판 유지 프레임 (860) 의 복수의 유지 유닛 (65) 에 의한 기판 (P) 의 유지가 해제된 상태로, 기판 (P) 을 기판 유지 프레임 (860) 으로부터 +X 방향으로 꺼내, 예를 들어 기판 교환 위치까지 반송할 수 있다. 기판 (P) 을 기판 교환 위치까지 반송하는 방법으로서는, 예를 들어, 복수의 에어 부상 유닛에 기판 (P) 을 수평 방향으로 반송 (전송) 하는 에어 컨베이어 기능을 갖게 할 수도 있고, 또는 기계적 반송 장치를 이용할 수도 있다. 제 8 실시형태에 관련된 기판 스테이지 장치 (PST8) 에 의하면, 기판 (P) 을 수평 이동시킴으로써, 기판 (P) 을 용이하고 또한 신속하게 기판 교환 위치로 반송할 수 있기 때문에, 스루풋이 향상된다. 또한, 기판을 기판 유지 프레임으로부터 개구부를 통해 꺼낼 때, 및 기판을 기판 유지 프레임 내로 개구부를 통해 삽입할 때에, 기판을 흡착 유지하는 유지 유닛을, 기판의 이동 경로로부터 퇴피 가능한 구성 (예를 들어, 유지 유닛을 상하 방향으로 이동, 또는 기판 유지 프레임을 구성하는 각 프레임 부재의 내부에 수용할 수 있는 구성) 을 채용할 수 있다. 이 경우, 기판의 교환을 보다 확실하게 수행할 수가 있다.
또한, 전술한 제 1 내지 제 8 실시형태는 적절히 조합될 수 있다. 예를 들어, 전술한 제 2 실시형태의 기판 유지 프레임과 동일한 구성의 기판 유지 프레임을, 전술한 제 3 내지 제 6 실시형태에 관련된 각 기판 스테이지 장치에 사용할 수 있다.
- 제 9 실시형태
다음으로 제 9 실시형태에 대해 설명한다. 상기 제 1 내지 제 8 실시형태의 각각에 관련된 기판 스테이지 장치가 액정 노광 장치에 형성되어 있는 반면, 본 제 9 실시형태에 관련된 기판 스테이지 장치 (PST9) 는, 도 17 에 나타나듯이, 기판 검사 장치 (900) 에 형성되어 있다.
기판 검사 장치 (900) 는, 촬영 유닛 (photographic unit; 910) 이 보디 (BD) 에 의해 지지를 받고 있다. 촬영 유닛 (910) 은, 예를 들어 도시되지 않은 CCD (Charge Coupled Device) 등의 이미지 센서, 렌즈 등을 포함하는 촬영 광학계를 가지고 있고, 촬영 유닛 (910) 의 바로 아래 (-Z 측) 에 배치된 기판 (P) 의 표면을 촬영한다. 촬영 유닛 (910) 으로부터의 출력 (기판 (P) 표면의 화상 데이터) 은 외부에 출력되어 그 화상 데이터에 기초하여 기판 (P) 의 검사 (예를 들어, 패턴의 결함, 또는 파티클 등의 검출) 가 수행된다. 또한, 기판 검사 장치 (900) 가 갖는 기판 스테이지 장치 (PST9) 는, 전술한 제 1 실시형태의 기판 스테이지 장치 (PST1) (도 1 참조) 의 구성과 같다. 주제어장치는, 기판 (P) 의 검사시에, 정점 스테이지 (40) (도 2 참조) 를 이용해 기판 (P) 의 피검사 부분 (촬영 유닛 (910) 의 바로 아래의 부분) 의 면 위치를, 촬영 유닛 (910) 이 갖는 촬영 광학계의 초점 심도 내에 위치하도록 조정한다. 따라서, 기판 (P) 의 선명한 화상 데이터를 얻을 수 있다. 또, 기판 (P) 의 위치 결정을 고속으로 또한 고정밀도로 실시할 수가 있으므로, 기판 (P) 의 검사 효율이 향상된다. 또한, 기판 검사 장치의 기판 스테이지 장치로서, 전술한 제 2 내지 제 8 실시형태에 관련된 다른 기판 스테이지 장치의 어느 하나를 적용해도 된다. 또한, 전술한 제 9 실시형태에서는, 검사 장치 (900) 가 촬상 방식에 기초한 경우에 대해 예시했지만, 검사 장치는, 촬상 방식으로 한정하지 않고, 다른 방식, 회절/산란 검출, 또는 스캐터로메트리 (scatterometry) 등에 기초할 수도 있다.
또한, 전술한 각 실시형태에 있어서, 기판 유지 프레임을 이용해 기판의 XY평면 내의 위치를 고속이고 고정밀도로 제어했지만, 기판의 위치를 고정밀도로 제어할 필요가 없는 물체 처리 장치에 전술한 각 실시형태가 적용되는 경우에는, 반드시 기판 유지 프레임을 사용할 필요는 없고, 예를 들어 복수의 에어 부상 유닛에, 에어를 사용한 기판의 수평 반송 기능을 갖게 하는 것도 가능하다.
또, 상기 각 실시형태에서는, 기판은, X-축 및 Y-축 방향인 직교 2 축 방향으로 기판을 구동하는 구동 유닛 (XY 이차원 스테이지 장치) 에 의해, 수평면을 따라 안내되었지만, 구동 유닛은, 예를 들어 기판 상의 노광 영역의 폭과 기판의 폭이 같으면, 기판을 일축 방향으로만 안내해도 된다.
또, 전술한 각 실시형태에서는, 복수의 에어 부상 유닛이, 기판을 XY 평면에 평행이 되도록 부상 지지했지만, 지지 대상이 되는 물체의 종류에 따라, 그 물체를 부상하는 장치의 구성은 이것에 한정되지 않고, 예를 들어 자기 또는 정전기에 의해 물체를 부상시켜도 된다. 마찬가지로, 정점 스테이지의 에어 척 유닛으로서, 유지 대상이 되는 물체의 종류에 따라, 예를 들어 자기 또는 정전기에 의해 유지 대상의 물체를 유지하는 구성을 채용하는 것도 가능하다.
또, 전술한 각 실시형태에서는, 기판 유지 프레임의 XY 평면 내의 위치 정보는, 기판 유지 프레임에 형성된 이동경에 계측 빔을 조사하는 레이저 간섭계를 포함하는 레이저 간섭계 시스템에 의해 획득되지만, 기판 유지 프레임의 위치 계측 장치로서는, 이것에 한정되지 않고, 예를 들어 이차원 인코더 시스템을 이용해도 된다. 이 경우, 예를 들어 기판 유지 프레임에 스케일 (scale) 을 마련해 보디 등에 고정된 헤드에 의해 기판 유지 프레임의 위치 정보를 구할 수도 있고, 기판 유지 프레임에 헤드를 마련해 예를 들어 보디 등에 고정된 스케일을 이용해 기판 유지 프레임의 위치 정보를 구할 수도 있다.
또한, 전술한 각 실시형태에 있어서, 정점 스테이지는, 기판의 피노광 영역(혹은 피촬영 영역) 을 Z-축방향 및 θx 및 θy 방향 중 Z-축 방향으로만 변위시키는 구성을 채용할 수 있다.
또, 상기 각 실시형태에서는, 기판 유지 프레임은, 평면시 직사각형 형상의 외형 형상 (윤곽) 과 평면시 직사각형 형상의 개구부를 가지고 있었지만, 기판을 유지하는 부재의 형상은, 이것에 한정되지 않고, 예를 들어 유지 대상인 물체의 형상에 따라 적절히 변경 (예를 들어, 물체가 원판상이면, 유지 부재도 원형 프레임 형상을 가질 수도 있다) 할 수 있다.
또한, 상기 각 실시형태에서는, 기판 유지 프레임은, 기판의 주위를 모두 둘러싸고 있을 필요는 없고, 그 주위의 일부가 둘러싸이지 않는 것도 가능하다. 또, 기판 반송을 위해서, 기판 유지 프레임 등의 기판을 유지하는 부재가 반드시 사용될 필요는 없다. 이 경우, 기판 그 자체의 위치를 계측할 필요가 있지만, 예를 들어, 경면으로서 기능하는 기판의 측면에 계측 빔을 조사하는 간섭계에 의해 기판의 위치를 계측할 수 있다. 또는, 기판의 전면 (또는 이면) 에 그레이팅을 형성해 두고, 이 그레이팅에 계측 광을 조사해 그 계측 광의 회절 광을 수광하는 헤드를 구비한 인코더에 의해 기판의 위치를 계측하는 것도 가능하다.
또, 조명광은, ArF 엑시머 레이저 광 (파장 193nm) 및 KrF 엑시머 레이저 광 (파장 248nm) 등의 자외광이나, F2 레이저 광 (파장 157nm) 등의 진공 자외광일 수 있다. 또, 조명광으로서는, 예를 들어 DFB 반도체 레이저 또는 파이버 레이저에 의해 방출되는 적외역 또는 가시역의 단일 파장 레이저 광을, 예를 들어 에르븀 (또는 에르븀과 이테르븀의 양방) 으로 도핑된 파이버 증폭기로 증폭하고, 비선형 광학 결정을 이용해 자외광으로 파장 변환하여 획득한 고조파를 이용해도 된다. 또, 고체 (solid state) 레이저 (파장:355nm, 266nm) 등을 사용해도 된다.
또, 상기 각 실시형태에서는, 투영 광학계 (PL) 가, 복수의 광학계를 구비한 멀티 렌즈 방식의 투영 광학계인 경우에 대해 설명했지만, 투영 광학계의 수는 이것에 한정되지 않고, 1 개 이상 있으면 된다. 또, 투영 광학계는, 멀티 렌즈 방식의 투영 광학계에 한정하지 않고, 예를 들어 오프너 (offner) 형의 대형 미러를 사용한 투영 광학계 등일 수 있다. 또, 상기 각 실시형태에서는 투영 광학계 (PL) 로서 투영 배율이 등배계인 것을 사용하는 경우에 대해 설명했지만, 이것에 한정되지 않고, 투영 광학계는 확대계 및 축소계의 어느 일방일 수 있다.
또, 상기 각 실시형태에서는, 노광 장치가, 스캐닝 스테퍼인 경우에 대해 설명했지만, 이것에 한정되지 않고, 스테퍼 등의 정지형 노광 장치에 상기 각 실시형태를 적용해도 된다. 또, 쇼트 영역과 쇼트 영역을 합성하는 스텝-앤드-스티치 (step-and-stitch) 방식의 투영 노광 장치에도 상기 각 실시형태는 적용될 수 있다. 또, 상기 각 실시형태는, 투영 광학계를 이용하지 않는 프록시미티 방식 (proximity method) 의 노광 장치에도 적용할 수 있다.
또, 노광 장치의 용도로서는, 직사각형의 유리 플레이트에 액정 표시 소자 패턴을 전사하는 액정 표시 소자용 노광 장치에 한정되지 않고, 상기 실시형태의 각각은, 예를 들어 반도체 제조용의 노광 장치, 박막 자기 헤드, 마이크로머신, DNA 칩 등을 제조하기 위한 노광 장치에도 넓게 적용할 수 있다. 또, 반도체 소자 등의 마이크로 디바이스를 제조하기 위한 노광 장치뿐만이 아니고, 광 노광 장치, EUV 노광 장치, X-선 노광 장치, 및 전자-빔 노광 장치 등에 사용되는 마스크 또는 레티클을 제조하기 위해서, 유리 기판, 실리콘 웨이퍼 등에 회로 패턴을 전사하는 노광 장치에도 상기 각 실시형태를 적용할 수 있다. 또한, 노광 대상이 되는 물체는 유리 플레이트에 한정되는 것이 아니고, 예를 들어 웨이퍼, 세라믹 기판, 필름 부재, 또는 마스크 블랭크 등과 같은 다른 물체일 수 있다.
또한, 상기 각 실시형태에 관련된 물체 처리 장치는 노광 장치뿐만이 아니라, 예를 들어 잉크젯 방식에 의한 기능성 액체 부여 장치를 구비한 소자 제조 장치에도 적용할 수 있다.
또한, 지금까지 상세한 설명에서 인용되고 노광 장치 등에 관련된 PCT 국제공개공보, 미국 특허 출원 공개공보 및 미국 특허 등의 모든 공보의 개시들은 각각 참조에 의해 본원에 통합된다.
- 디바이스 제조 방법
다음으로, 상기 각 실시형태의 노광 장치를 리소그래피 공정에서 사용한 마이크로 디바이스의 제조 방법에 대해 설명한다. 상기 각 실시형태의 노광 장치에서는, 플레이트 (유리 기판) 상에 소정의 패턴 (회로 패턴 또는 전극 패턴 등) 을 형성함으로써, 마이크로 디바이스로서의 액정 표시 소자를 얻을 수 있다.
- 패턴 형성 공정
먼저, 상기 서술한 각 실시형태의 노광 장치를 이용해, 패턴 이미지를 감광성 기판 (레지스트가 코팅된 유리 기판 등) 에 형성하는, 이른바 광학적 리소그래피 공정이 실행된다. 이 광학적 리소그래피 공정에 의해, 감광성 기판 상에는 다수의 전극 등을 포함하는 소정 패턴이 형성된다. 그 후, 노광된 기판은, 현상 공정, 에칭 공정, 레지스트 제거 공정 등의 각 공정을 거침으로써, 기판 상에 소정의 패턴이 형성된다.
- 컬러 필터 형성 공정
다음으로, R (적), G (녹), B (청) 에 대응하는 3 개의 도트의 조가 매트릭스 형상으로 다수 배열된, 또는 R, G, B 의 3 개의 스트라이프 (stripes) 의 필터의 조를 복수 수평 주사선 방향으로 배열한 컬러 필터를 형성한다.
- 셀 조립 공정
다음으로, 패턴 형성 공정에서 얻어진 소정 패턴을 갖는 기판, 및 컬러 필터 형성 공정에서 얻어진 컬러 필터 등을 이용해 액정 패널 (액정 셀) 을 조립한다. 예를 들어, 패턴 형성 공정에서 얻어진 소정 패턴을 갖는 기판과 컬러 필터 형성 공정에서 얻어진 컬러 필터 사이에 액정을 주입해 액정 패널 (액정 셀) 을 제조한다.
- 모듈 조립공정
그 후, 조립된 액정 패널 (액정 셀) 의 표시 동작을 실시하게 하는 전기 회로, 및 백라이트 등의 각 부품을 장착하여 액정 표시 소자로서 완성시킨다.
이 경우, 패턴 형성 공정에 있어서, 상기 각 실시형태의 노광 장치를 이용해 고스루풋으로 또한 고정밀도로 플레이트의 노광을 실시하므로, 결과적으로, 액정 표시 소자의 생산성을 향상시킬 수 있다.
산업상 이용 가능성
이상 설명한 바와 같이, 본 발명의 물체 처리 장치는 평판 모양의 물체에 대해 소정의 처리를 실시하는데 적합하다. 또, 본 발명의 노광 장치 및 노광 방법은, 평판 모양의 물체를 에너지 빔으로 노광하는데 적합하다. 또, 본 발명의 디바이스 제조 방법은 마이크로 디바이스의 생산에 적합하다.
Claims (30)
- 물체를 부상 지지하는 지지부와,
상기 부상 지지된 물체를 유지한 상태로, 상기 지지부에 대해 상대 이동 가능한 유지부와,
상기 유지부에 유지된 상기 물체를, 상기 지지부에 대해 상대 이동시켜, 상기 유지부로부터 반송하는 반송부를 구비하는 이동체 장치. - 제 1 항에 있어서,
상기 반송부는, 상기 물체가 상기 유지부로부터 반송된 상기 유지부에 대해, 상기 물체와는 상이한 물체를 반송하는 이동체 장치. - 물체를 부상 지지하는 지지부와,
상기 부상 지지된 상기 물체를, 상기 지지부에 대해 상대 이동시키는 반송부와,
상기 반송부에 의해 반송된 상기 물체를 유지하는 유지부와,
상기 물체를 유지하는 상기 유지부를, 상기 지지부에 대해 상대 이동시키는 구동부를 구비하는 이동체 장치. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 지지부는, 상기 물체에 대해 제 1 방향으로 부상력을 부여하여 상기 물체를 부상 지지하고,
상기 반송부는, 상기 제 1 방향과 교차하는 제 2 방향으로 상기 물체를 반송하는 이동체 장치. - 제 4 항에 있어서,
상기 유지부는, 상기 물체에 있어서, 상기 제 1 및 제 2 방향과 교차하는 제 3 방향에 있어서의 단부 (端部) 를 유지하는 이동체 장치. - 제 5 항에 있어서,
상기 유지부는, 상기 제 3 방향으로 떨어져서 형성되고, 상기 물체의 상기 제 3 방향으로 떨어진 복수 영역을 유지하는 이동체 장치. - 제 5 항 또는 제 6 항에 있어서,
상기 유지부는, 상기 제 2 방향으로 떨어져서 형성되고, 상기 물체의 상기 제 2 방향으로 떨어진 복수 영역을 유지하는 이동체 장치. - 제 1 항 내지 제 7 항 중 어느 한 항에 있어서,
상기 유지부는, 상기 반송부에 의한 상기 물체의 이동 경로로부터 퇴피 가능하게 형성되는 이동체 장치. - 제 8 항에 있어서,
상기 유지부는, 상기 반송부에 의한 상기 물체의 이동 경로로부터 퇴피하도록 상기 지지부에 대해 상하 방향으로 구동되는 이동체 장치. - 제 9 항에 있어서,
상기 유지부는, 상기 물체를 흡착하는 흡착부와, 상기 반송부에 의한 상기 물체의 이동 경로로부터 퇴피하도록 상기 흡착부가 수용 가능하게 형성된 본체부를 갖는 이동체 장치. - 제 1 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 반송부는, 상기 유지부에 의한 상기 물체의 유지가 해제된 상기 물체를, 상기 유지부로부터 반송하는 이동체 장치. - 제 1 항 내지 제 11 항 중 어느 한 항에 있어서,
상기 반송부는, 상기 유지부에 형성된 개구부를 통하여, 상기 물체를 반송하는 이동체 장치. - 제 1 항 내지 제 12 항 중 어느 한 항에 있어서,
상기 유지부에 형성되고, 상기 물체를 유지하는 상기 유지부의 위치에 관한 정보를 취득하는 취득부를 구비하고,
상기 구동부는, 상기 정보에 기초하여, 상기 유지부를 상기 지지부에 대해 상대 이동시키는 이동체 장치. - 제 13 항에 있어서,
상기 취득부는, 복수의 격자 영역이 형성되는 격자 부재와, 상기 격자 부재에 대해 계측 빔을 조사하는 헤드를 갖고,
상기 격자 부재와 상기 헤드의 일방은, 상기 유지부에 형성되는 이동체 장치. - 제 1 항 내지 제 14 항 중 어느 한 항에 있어서,
상기 유지부를, 소정 방향에 관해서, 상기 지지부에 대해 상대 구동시키는 제 1 구동계와,
상기 제 1 구동계로 구동된 상기 유지부를, 상기 소정 방향에 관해서, 상기 지지부와 상기 제 1 구동계에 대해 상대 구동시키는 제 2 구동계를 추가로 구비하는 이동체 장치. - 제 15 항에 있어서,
상기 제 2 구동계는, 상기 유지부에 형성되는 이동체 장치. - 제 15 항 또는 제 16 항에 있어서,
상기 제 1 구동계는, 상기 지지부의 하방에 형성되는 이동체 장치. - 제 1 항 내지 제 17 항 중 어느 한 항에 기재된 이동체 장치와,
상기 유지부에 유지된 상기 물체에 대해 소정 처리를 실시하는 처리부를 구비하는 물체 처리 장치. - 제 18 항에 있어서,
상기 처리부는, 에너지 빔을 사용하여 상기 물체를 주사 노광하여, 소정 패턴을 상기 물체 상에 형성하는 패턴 형성 장치인 물체 처리 장치. - 제 18 항 또는 제 19 항에 있어서,
상기 물체는, 디스플레이 장치의 표시 패널에 사용되는 기판인 물체 처리 장치. - 제 20 항에 있어서,
상기 물체는, 사이즈가 500 ㎜ 이상인 기판인 물체 처리 장치. - 제 18 항에 기재된 물체 처리 장치를 사용하여 상기 물체를 노광하는 것과,
노광된 상기 물체를 현상하는 것을 포함하는 플랫 패널 디스플레이의 제조 방법. - 제 18 항 또는 제 19 항에 기재된 물체 처리 장치를 사용하여 상기 물체를 노광하는 것과,
노광된 상기 물체를 현상하는 것을 포함하는 디바이스 제조 방법. - 지지부에 부상 지지되고, 유지부에 의해 유지된 물체를, 상기 지지부에 대해 상대 구동시키는 것과,
상기 물체를 노광하는 것과,
상기 노광함으로써 노광된 상기 물체를, 반송부에 의해, 상기 유지부로부터 반송하는 것을 포함하는 반송 방법. - 제 24 항에 있어서,
상기 반송하는 것에서는, 상기 물체가 상기 유지부로부터 반송된 상기 유지부에 대해, 상기 물체와는 상이한 물체를 반송하는 반송 방법. - 물체를 지지부에 의해 부상 지지하는 것과,
상기 물체를 유지한 상태로 상기 지지부에 대해 상대 이동 가능한 유지부에, 상기 부상 지지된 상기 물체를 상기 유지부로 반송하는 것과,
반송된 상기 물체를 유지하는 유지부를 구동하고, 상기 물체를 노광하는 것을 포함하는 반송 방법. - 제 24 항 내지 제 26 항 중 어느 한 항에 있어서,
상기 반송하는 것에서는, 상기 지지부에 의해 제 1 방향으로 부상력이 부여되어 부상 지지된 상기 물체를, 상기 제 1 방향과 교차하는 제 2 방향으로 상기 물체를 반송하는 반송 방법. - 제 24 항 내지 제 27 항 중 어느 한 항에 있어서,
상기 반송함으로써 상기 물체가 이동되는 경로로부터 상기 유지부를 퇴피시키는 것을 추가로 포함하는 반송 방법. - 제 28 항에 있어서,
상기 퇴피시키는 것에서는, 상기 반송함으로써 상기 물체가 이동되는 경로로부터 퇴피하도록 상기 지지부에 대해 상하 방향으로 상기 유지부를 구동하는 반송 방법. - 제 24 항 내지 제 29 항 중 어느 한 항에 있어서,
상기 반송하는 것에서는, 상기 유지부에 의한 상기 물체의 유지가 해제된 상기 물체를, 상기 유지부로부터 반송하는 반송 방법.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US23549909P | 2009-08-20 | 2009-08-20 | |
| US61/235,499 | 2009-08-20 | ||
| US12/855,283 | 2010-08-12 | ||
| US12/855,283 US20110042874A1 (en) | 2009-08-20 | 2010-08-12 | Object processing apparatus, exposure apparatus and exposure method, and device manufacturing method |
| PCT/JP2010/064134 WO2011021711A1 (en) | 2009-08-20 | 2010-08-17 | Object processing apparatus, exposure apparatus and exposure method, and device manufacturing method |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020127005322A Division KR101862001B1 (ko) | 2009-08-20 | 2010-08-17 | 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197033934A Division KR102184248B1 (ko) | 2009-08-20 | 2010-08-17 | 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20180058854A true KR20180058854A (ko) | 2018-06-01 |
Family
ID=43604681
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020127005322A KR101862001B1 (ko) | 2009-08-20 | 2010-08-17 | 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 |
| KR1020187014458A KR20180058854A (ko) | 2009-08-20 | 2010-08-17 | 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 |
| KR1020197033934A KR102184248B1 (ko) | 2009-08-20 | 2010-08-17 | 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020127005322A KR101862001B1 (ko) | 2009-08-20 | 2010-08-17 | 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197033934A KR102184248B1 (ko) | 2009-08-20 | 2010-08-17 | 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20110042874A1 (ko) |
| JP (5) | JP5776923B2 (ko) |
| KR (3) | KR101862001B1 (ko) |
| CN (4) | CN105954982B (ko) |
| TW (4) | TWI632640B (ko) |
| WO (1) | WO2011021711A1 (ko) |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5573849B2 (ja) * | 2009-08-20 | 2014-08-20 | 株式会社ニコン | 物体処理装置、露光装置及び露光方法、並びにデバイス製造方法 |
| US8699001B2 (en) * | 2009-08-20 | 2014-04-15 | Nikon Corporation | Object moving apparatus, object processing apparatus, exposure apparatus, object inspecting apparatus and device manufacturing method |
| US8598538B2 (en) | 2010-09-07 | 2013-12-03 | Nikon Corporation | Movable body apparatus, object processing device, exposure apparatus, flat-panel display manufacturing method, and device manufacturing method |
| CN109324485A (zh) * | 2011-08-30 | 2019-02-12 | 株式会社尼康 | 曝光方法、制造方法和基板处理方法 |
| JP5464186B2 (ja) * | 2011-09-07 | 2014-04-09 | 信越化学工業株式会社 | フォトマスクブランク、フォトマスク及びその製造方法 |
| KR101854959B1 (ko) * | 2012-04-03 | 2018-05-04 | 가부시키가이샤 니콘 | 반송 장치, 및 전자 디바이스 형성 방법 |
| JP5863149B2 (ja) * | 2012-04-04 | 2016-02-16 | 株式会社ニコン | 露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法 |
| NL2010679A (en) | 2012-05-23 | 2013-11-26 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method. |
| TWI464795B (zh) * | 2012-07-13 | 2014-12-11 | Apone Technology Ltd | 局部表面處理的遮罩方法 |
| CN103572342B (zh) * | 2012-07-23 | 2016-04-20 | 崇鼎科技有限公司 | 局部表面处理的屏蔽方法 |
| DE102012219332B4 (de) * | 2012-10-23 | 2014-11-13 | Mdi Schott Advanced Processing Gmbh | Vorrichtung und Verfahren zum Lagern und Fixieren einer Glasscheibe |
| JP7071118B2 (ja) * | 2014-08-19 | 2022-05-18 | ルミレッズ ホールディング ベーフェー | ダイレベルのレーザリフトオフ中の機械的損傷を減少させるサファイアコレクタ |
| KR102569618B1 (ko) * | 2015-03-30 | 2023-08-22 | 가부시키가이샤 니콘 | 물체 반송 장치, 노광 장치, 플랫 패널 디스플레이의 제조 방법, 디바이스 제조 방법, 물체 반송 방법, 및 노광 방법 |
| KR102584657B1 (ko) | 2015-03-31 | 2023-10-04 | 가부시키가이샤 니콘 | 노광 장치, 플랫 패널 디스플레이의 제조 방법, 디바이스 제조 방법, 및 노광 방법 |
| EP3295479B1 (en) * | 2015-05-13 | 2018-09-26 | Lumileds Holding B.V. | Sapphire collector for reducing mechanical damage during die level laser lift-off |
| US10520834B2 (en) | 2015-09-30 | 2019-12-31 | Nikon Corporation | Movable body apparatus, exposure apparatus, manufacturing method of flat-panel display and device manufacturing method, and movement method of object |
| JP6885334B2 (ja) * | 2015-09-30 | 2021-06-16 | 株式会社ニコン | 露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法、並びに露光方法 |
| US10802407B2 (en) | 2015-09-30 | 2020-10-13 | Nikon Corporation | Exposure apparatus, exposure method, manufacturing method of flat-panel display, and device manufacturing method |
| CN106814551B (zh) * | 2015-11-30 | 2019-04-12 | 上海微电子装备(集团)股份有限公司 | 一种基板交接装置及交接方法 |
| US11860552B2 (en) | 2016-07-01 | 2024-01-02 | Asml Netherlands B.V. | Stage system, lithographic apparatus, method for positioning and device manufacturing method |
| JP6791255B2 (ja) * | 2016-09-30 | 2020-11-25 | 株式会社ニコン | 搬送装置、露光装置、露光方法、フラットパネルディスプレイの製造方法、デバイス製造方法、及び搬送方法 |
| US20190377271A1 (en) * | 2016-09-30 | 2019-12-12 | Nikon Corporation | Exposure apparatus, manufacturing method of flat-panel display, device manufacturing method, and exposure method |
| JP6805018B2 (ja) * | 2017-02-10 | 2020-12-23 | 東京エレクトロン株式会社 | 塗布装置、および塗布方法 |
| KR102630304B1 (ko) * | 2017-03-31 | 2024-01-26 | 가부시키가이샤 니콘 | 노광 장치, 노광 방법, 플랫 패널 디스플레이의 제조 방법, 및, 디바이스 제조 방법 |
| JP6573131B2 (ja) * | 2017-04-19 | 2019-09-11 | 株式会社ニコン | 移動体装置、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法 |
| JP6983578B2 (ja) * | 2017-08-25 | 2021-12-17 | 株式会社日本製鋼所 | レーザ照射装置、レーザ照射方法、及び半導体装置の製造方法 |
| JP7114277B2 (ja) | 2018-03-07 | 2022-08-08 | キヤノン株式会社 | パターン形成装置及び物品の製造方法 |
| JP2019045875A (ja) * | 2018-12-07 | 2019-03-22 | 株式会社ニコン | 露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び露光方法 |
| JP7285648B2 (ja) * | 2019-01-31 | 2023-06-02 | 株式会社Screenホールディングス | 搬送装置、露光装置および搬送方法 |
| WO2021044505A1 (ja) * | 2019-09-03 | 2021-03-11 | 株式会社ニコン | 移動体装置及び加工システム |
| JP2021067925A (ja) * | 2019-10-21 | 2021-04-30 | キヤノン株式会社 | 支持装置、投影光学系、露光装置、支持装置の調整方法および物品製造方法 |
| JP2021035682A (ja) * | 2020-12-03 | 2021-03-04 | 東京エレクトロン株式会社 | 塗布装置、および塗布方法 |
| CN112739028A (zh) * | 2020-12-29 | 2021-04-30 | 中山新诺科技股份有限公司 | 一种用于双面数字化曝光的基材平整装置 |
| JP2022187380A (ja) * | 2021-06-07 | 2022-12-19 | 株式会社ジャパンディスプレイ | 表示装置の製造方法 |
| CN113247627B (zh) * | 2021-06-28 | 2021-11-12 | 新沂市铭达玻璃有限公司 | 一种基于玻璃输送的自动化装置 |
| CN114509923B (zh) * | 2022-01-28 | 2023-11-24 | 复旦大学 | 一种深紫外物镜设计中的调焦调平装置及其应用 |
| US20230375945A1 (en) * | 2022-05-19 | 2023-11-23 | Taiwan Semiconductor Manufacturing Co., Ltd. | Workpiece support |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008129762A1 (ja) | 2007-03-05 | 2008-10-30 | Nikon Corporation | 移動体装置、パターン形成装置及びパターン形成方法、デバイス製造方法、移動体装置の製造方法、並びに移動体駆動方法 |
Family Cites Families (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4642908B1 (ko) * | 1968-09-19 | 1971-12-18 | ||
| KR100300618B1 (ko) * | 1992-12-25 | 2001-11-22 | 오노 시게오 | 노광방법,노광장치,및그장치를사용하는디바이스제조방법 |
| JP3689949B2 (ja) * | 1995-12-19 | 2005-08-31 | 株式会社ニコン | 投影露光装置、及び該投影露光装置を用いたパターン形成方法 |
| EP0866375A3 (en) * | 1997-03-17 | 2000-05-24 | Nikon Corporation | Article positioning apparatus and exposing apparatus having the same |
| JP2000078830A (ja) * | 1998-09-01 | 2000-03-14 | Nikon Corp | リニアモータ及びステージ装置並びに露光装置 |
| JP2000243693A (ja) * | 1999-02-23 | 2000-09-08 | Nikon Corp | ステージ装置及び露光装置 |
| JP2001215718A (ja) * | 1999-11-26 | 2001-08-10 | Nikon Corp | 露光装置及び露光方法 |
| EP1160628B1 (en) * | 2000-06-02 | 2007-07-18 | ASML Netherlands B.V. | Lithographic projection apparatus with a supporting assembly |
| TW527526B (en) * | 2000-08-24 | 2003-04-11 | Asml Netherlands Bv | Lithographic apparatus, device manufacturing method, and device manufactured thereby |
| TW529172B (en) * | 2001-07-24 | 2003-04-21 | Asml Netherlands Bv | Imaging apparatus |
| US6888620B2 (en) * | 2001-11-29 | 2005-05-03 | Nikon Corporation | System and method for holding a device with minimal deformation |
| US20030098965A1 (en) * | 2001-11-29 | 2003-05-29 | Mike Binnard | System and method for supporting a device holder with separate components |
| TWI222423B (en) * | 2001-12-27 | 2004-10-21 | Orbotech Ltd | System and methods for conveying and transporting levitated articles |
| TWI226303B (en) * | 2002-04-18 | 2005-01-11 | Olympus Corp | Substrate carrying device |
| JP2004079630A (ja) * | 2002-08-12 | 2004-03-11 | Nikon Corp | 支持装置とその製造方法およびステージ装置並びに露光装置 |
| JP2004238133A (ja) * | 2003-02-05 | 2004-08-26 | Sharp Corp | 薄板把持装置、薄板搬送装置および薄板検査装置 |
| US7077019B2 (en) * | 2003-08-08 | 2006-07-18 | Photon Dynamics, Inc. | High precision gas bearing split-axis stage for transport and constraint of large flat flexible media during processing |
| JP4373175B2 (ja) * | 2003-10-17 | 2009-11-25 | オリンパス株式会社 | 基板搬送装置 |
| WO2005099350A2 (en) * | 2004-04-14 | 2005-10-27 | Coreflow Scientific Solutions Ltd. | Non-contact support platforms for distance adjustment |
| US20080013060A1 (en) * | 2004-07-23 | 2008-01-17 | Nikon Corporation | Support Apparatus, Stage Apparatus, Exposure Apparatus, And Device Manufacturing Method |
| US7440081B2 (en) * | 2004-11-05 | 2008-10-21 | Asml Netherlands B.V. | Lithographic apparatus, device manufacturing method, and substrate table |
| JP4858439B2 (ja) * | 2005-01-25 | 2012-01-18 | 株式会社ニコン | 露光装置及び露光方法並びにマイクロデバイスの製造方法 |
| JP2006265020A (ja) * | 2005-03-23 | 2006-10-05 | Nippon Sheet Glass Co Ltd | ガラス板搬送支持装置 |
| CN100514193C (zh) * | 2005-03-29 | 2009-07-15 | 株式会社尼康 | 曝光装置、曝光装置的制造方法以及微元件的制造方法 |
| KR100949502B1 (ko) * | 2005-06-20 | 2010-03-24 | 엘지디스플레이 주식회사 | 액정표시장치 제조 공정용 기판 반송장치 |
| JP4553376B2 (ja) * | 2005-07-19 | 2010-09-29 | 東京エレクトロン株式会社 | 浮上式基板搬送処理装置及び浮上式基板搬送処理方法 |
| US7543867B2 (en) * | 2005-09-30 | 2009-06-09 | Photon Dynamics, Inc. | Vacuum gripping system for positioning large thin substrates on a support table |
| WO2007074798A1 (ja) * | 2005-12-27 | 2007-07-05 | Sharp Kabushiki Kaisha | 基板処理装置への基板搬送方法 |
| TWI550688B (zh) * | 2006-01-19 | 2016-09-21 | 尼康股份有限公司 | 液浸曝光裝置及液浸曝光方法、以及元件製造方法 |
| JP4702083B2 (ja) * | 2006-02-10 | 2011-06-15 | ウシオ電機株式会社 | XYθ移動ステージ |
| EP2003680B1 (en) * | 2006-02-21 | 2013-05-29 | Nikon Corporation | Exposure apparatus, exposure method and device manufacturing method |
| KR101495471B1 (ko) * | 2006-02-21 | 2015-02-23 | 가부시키가이샤 니콘 | 패턴 형성 장치, 마크 검출 장치, 노광 장치, 패턴 형성 방법, 노광 방법 및 디바이스 제조 방법 |
| US20070236854A1 (en) * | 2006-04-11 | 2007-10-11 | Lee Martin E | Anti-Gravity Device for Supporting Weight and Reducing Transmissibility |
| JP2008063020A (ja) * | 2006-09-04 | 2008-03-21 | Olympus Corp | 基板搬送装置およびそれを用いた基板検査システム |
| JP5146323B2 (ja) * | 2006-12-27 | 2013-02-20 | 株式会社ニコン | ステージ装置、露光装置、及びデバイスの製造方法 |
| JP2008192678A (ja) * | 2007-02-01 | 2008-08-21 | Toppan Printing Co Ltd | 基板処理装置 |
| JP4652351B2 (ja) * | 2007-02-02 | 2011-03-16 | 大日本印刷株式会社 | 基板支持装置、基板支持方法 |
| JP4743716B2 (ja) * | 2007-03-06 | 2011-08-10 | 東京エレクトロン株式会社 | 基板処理装置 |
| US7607647B2 (en) | 2007-03-20 | 2009-10-27 | Kla-Tencor Technologies Corporation | Stabilizing a substrate using a vacuum preload air bearing chuck |
| JP5279207B2 (ja) * | 2007-06-11 | 2013-09-04 | Nskテクノロジー株式会社 | 露光装置用基板搬送機構 |
| JP2009085865A (ja) * | 2007-10-02 | 2009-04-23 | Olympus Corp | 基板検査装置 |
| JP2009128830A (ja) * | 2007-11-27 | 2009-06-11 | Sharp Corp | 基板処理装置及び基板処理装置の制御方法 |
| US8115906B2 (en) * | 2007-12-14 | 2012-02-14 | Nikon Corporation | Movable body system, pattern formation apparatus, exposure apparatus and measurement device, and device manufacturing method |
| JP2009147240A (ja) * | 2007-12-18 | 2009-07-02 | Dainippon Printing Co Ltd | 基板支持装置、基板支持方法、基板加工装置、基板加工方法、表示装置構成部材の製造方法 |
| JP2009256029A (ja) * | 2008-04-15 | 2009-11-05 | Toray Eng Co Ltd | 板状部材の搬送装置および板状部材の搬送方法 |
| KR20100018950A (ko) | 2008-08-08 | 2010-02-18 | 하명찬 | 타이어 가황기용 단열판 |
| JP5254073B2 (ja) * | 2008-08-21 | 2013-08-07 | Nskテクノロジー株式会社 | スキャン露光装置およびスキャン露光装置の基板搬送方法 |
| US8699001B2 (en) * | 2009-08-20 | 2014-04-15 | Nikon Corporation | Object moving apparatus, object processing apparatus, exposure apparatus, object inspecting apparatus and device manufacturing method |
| JP2010132460A (ja) * | 2010-01-13 | 2010-06-17 | Toray Eng Co Ltd | 板状部材の搬送装置および板状部材の搬送方法 |
| US8598538B2 (en) * | 2010-09-07 | 2013-12-03 | Nikon Corporation | Movable body apparatus, object processing device, exposure apparatus, flat-panel display manufacturing method, and device manufacturing method |
| US20120064460A1 (en) * | 2010-09-07 | 2012-03-15 | Nikon Corporation | Movable body apparatus, object processing device, exposure apparatus, flat-panel display manufacturing method, and device manufacturing method |
| US20120064461A1 (en) * | 2010-09-13 | 2012-03-15 | Nikon Corporation | Movable body apparatus, exposure apparatus, device manufacturing method, flat-panel display manufacturing method, and object exchange method |
-
2010
- 2010-08-12 US US12/855,283 patent/US20110042874A1/en not_active Abandoned
- 2010-08-17 KR KR1020127005322A patent/KR101862001B1/ko active IP Right Grant
- 2010-08-17 KR KR1020187014458A patent/KR20180058854A/ko active Application Filing
- 2010-08-17 KR KR1020197033934A patent/KR102184248B1/ko active IP Right Grant
- 2010-08-17 CN CN201610282686.7A patent/CN105954982B/zh active Active
- 2010-08-17 JP JP2010182051A patent/JP5776923B2/ja active Active
- 2010-08-17 CN CN201080036901.6A patent/CN102483578B/zh active Active
- 2010-08-17 WO PCT/JP2010/064134 patent/WO2011021711A1/en active Application Filing
- 2010-08-17 CN CN201610282679.7A patent/CN105957827B/zh active Active
- 2010-08-17 CN CN201610282687.1A patent/CN105954976B/zh active Active
- 2010-08-19 TW TW106108947A patent/TWI632640B/zh active
- 2010-08-19 TW TW107123789A patent/TWI686896B/zh active
- 2010-08-19 TW TW099127645A patent/TWI582893B/zh active
- 2010-08-19 TW TW109101726A patent/TW202021037A/zh unknown
-
2015
- 2015-07-13 JP JP2015139320A patent/JP2015232718A/ja active Pending
-
2017
- 2017-03-31 JP JP2017070706A patent/JP6628154B2/ja active Active
- 2017-03-31 JP JP2017070705A patent/JP6508576B2/ja active Active
-
2019
- 2019-12-09 JP JP2019222079A patent/JP2020043369A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008129762A1 (ja) | 2007-03-05 | 2008-10-30 | Nikon Corporation | 移動体装置、パターン形成装置及びパターン形成方法、デバイス製造方法、移動体装置の製造方法、並びに移動体駆動方法 |
| US20100018950A1 (en) | 2007-03-05 | 2010-01-28 | Nikon Corporation | Movable body apparatus, pattern forming apparatus and pattern forming method, device manufacturing method, manufacturing method of movable body apparatus, and movable body drive method |
Also Published As
| Publication number | Publication date |
|---|---|
| TW201126641A (en) | 2011-08-01 |
| JP2011044713A (ja) | 2011-03-03 |
| TWI632640B (zh) | 2018-08-11 |
| WO2011021711A1 (en) | 2011-02-24 |
| JP2015232718A (ja) | 2015-12-24 |
| KR20120053020A (ko) | 2012-05-24 |
| CN105954982B (zh) | 2018-06-01 |
| CN102483578A (zh) | 2012-05-30 |
| KR101862001B1 (ko) | 2018-05-29 |
| KR20190131146A (ko) | 2019-11-25 |
| TWI582893B (zh) | 2017-05-11 |
| JP2017142522A (ja) | 2017-08-17 |
| TWI686896B (zh) | 2020-03-01 |
| JP2020043369A (ja) | 2020-03-19 |
| JP6508576B2 (ja) | 2019-05-08 |
| CN105954982A (zh) | 2016-09-21 |
| CN105954976B (zh) | 2019-11-26 |
| TW201839901A (zh) | 2018-11-01 |
| CN105954976A (zh) | 2016-09-21 |
| TW202021037A (zh) | 2020-06-01 |
| CN105957827A (zh) | 2016-09-21 |
| TW201727819A (zh) | 2017-08-01 |
| US20110042874A1 (en) | 2011-02-24 |
| CN102483578B (zh) | 2016-05-25 |
| JP2017142523A (ja) | 2017-08-17 |
| KR102184248B1 (ko) | 2020-11-30 |
| JP5776923B2 (ja) | 2015-09-09 |
| JP6628154B2 (ja) | 2020-01-08 |
| CN105957827B (zh) | 2019-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101862001B1 (ko) | 물체 처리 장치, 노광 장치 및 노광 방법, 및 디바이스 제조 방법 | |
| JP6587160B2 (ja) | 移動体装置、物体処理装置、露光装置、露光方法、フラットパネルディスプレイの製造方法及びデバイス製造方法 | |
| JP6904384B2 (ja) | 移動体装置及び物体の移動方法、露光装置及び露光方法、並びにフラットパネルディスプレイの製造方法及びデバイス製造方法 | |
| KR101862234B1 (ko) | 물체 처리 장치, 노광 장치와 노광 방법, 및 디바이스 제조 방법 | |
| KR101911724B1 (ko) | 이동체 장치, 물체 처리 디바이스, 노광 장치, 플랫 패널 디스플레이 제조 방법, 및 디바이스 제조 방법 | |
| JP2019045875A (ja) | 露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び露光方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application | ||
| A107 | Divisional application of patent |