JP7303666B2 - 車両制御装置、車両制御方法および車両制御システム - Google Patents
車両制御装置、車両制御方法および車両制御システム Download PDFInfo
- Publication number
- JP7303666B2 JP7303666B2 JP2019100370A JP2019100370A JP7303666B2 JP 7303666 B2 JP7303666 B2 JP 7303666B2 JP 2019100370 A JP2019100370 A JP 2019100370A JP 2019100370 A JP2019100370 A JP 2019100370A JP 7303666 B2 JP7303666 B2 JP 7303666B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- notification
- command
- driver
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 9
- 230000000007 visual effect Effects 0.000 claims description 9
- 230000002452 interceptive effect Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W50/16—Tactile feedback to the driver, e.g. vibration or force feedback to the driver on the steering wheel or the accelerator pedal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Traffic Control Systems (AREA)
Description
本発明の目的の一つは、運転者が自動緊急回避操舵の妨げとなるのを抑制できる車両制御装置、車両制御方法および車両制御システムを提供することにある。
図1は、実施形態1の車両制御システムの構成図である。
実施例1の車両制御システムは、エンジン9を動力源とする車両に搭載されている。外界認識装置(外界認識部)1は、自車(車両)に搭載されたカメラ、レーザレーダ、GNSS(Global Navigation Satellite System)受信機や地図データベース等から、外界情報として自車の周辺環境(道路形状、白線等)や自車の現在位置を取得する。ナビゲーションシステム2は、自車の現在位置から運転者が設定した目的地までの目標走行経路を設定し、運転者に経路案内を行う。自車挙動検出装置3は、前輪の舵角を検出する舵角センサ、車速を検出する車速センサ、横Gを検出する横Gセンサ、ヨーレイトを検出するヨーレイトセンサやターンシグナル等の各信号から自車の挙動を検出する。車両制御コントローラ(コントロール部)4は、運転者による運転支援の選択(例えば、運転支援選択ボタンON)を含む所定の運転支援開始条件が成立すると、運転支援制御を実行する。
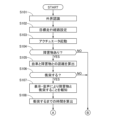
図2および図3は、実施形態1の運転支援制御の流れを示すフローチャートである。
ステップS101では、外界認識装置1により外界情報(道路形状、白線、自車位置等)を取得し、認識する。
ステップS102では、認識した外界情報および運転者が設定した目的地に基づき目標走行経路を設定する。
ステップS103では、自車が目標走行経路に沿って走行するよう各アクチュエータ(電動パワーステアリング装置8、エンジン9およびブレーキシステム10)を駆動する。
ステップS104では、外界認識装置1が前方の目標走行経路上に障害物を発見したかを判定する。YESの場合はステップS105へ進み、NOの場合はリターンへ進む。
ステップS106では、自車と障害物との距離、自車の車速等から、自車が障害物と衝突するかを判定する。YESの場合はステップS107へ進み、NOの場合はリターンへ進む。
ステップS107では、HUD装置11への表示、音声発話装置12からの音声出力および警報装置13からの警報音出力により、運転者に対し障害物と衝突することを報知する。表示による報知はナビゲーションシステム2のディスプレイ(タッチパネル)やインストルメントパネルのランプを用いてもよい。
ステップS108では、自車と障害物との距離および自車の車速に応じて予め設定された衝突予測マップを参照し、障害物と衝突するまでの時間を算出する。
ステップS109では、運転者による手動運転に切り替え可能かを、障害物と衝突するまでの時間に十分な余裕があるかにより判定する。YESの場合はステップS110へ進み、NOの場合はステップS114へ進む。このステップでは、障害物と衝突するまでの時間が閾値よりも長い場合に、障害物と衝突するまでの時間に十分な余裕があると判定する。
ステップS111では、ステップS110の報知開始から第1所定時間が経過するまでの間に、手動運転への切り替えが完了したかを判定する。YESの場合はステップS112へ進み、NOの場合はステップS114へ進む。このステップでは、ステアリングタッチセンサ16により運転者がステアリングホイールを握っていることが検出された場合に、手動運転への切り替えが完了したと判定する。
ステップS112では、障害物を回避する回避動作モードとして、運転者回避操舵モードへ移行する。運転者回避操舵モードは、運転者の手動操作によるステアリングホイールの操舵角に応じて前輪を転舵させるモードである。運転者回避操舵モードにおいて、電動パワーステアリング装置8は、運転者の操舵を補助するコンベンショナルな電動パワーステアリング装置として動作する。
ステップS113では、障害物を回避したかを判定する。YESの場合はリターンへ進み、NOの場合はステップS112へ戻る。
ステップS115では、ステアリングタッチセンサ16により、ステップS114の報知開始から第2所定時間が経過するまでの間に、運転者がステアリングホイールから手を離したか判定する。YESの場合はステップS117へ進み、NOの場合はステップS116へ進む。
ステップS116では、HUD装置11、音声発話装置12、警報装置13およびステアリング振動装置14に対し、運転者がステアリングホイールに触れぬよう促すための報知をするように制御する指令(第1報知指令)を出力する。ここで、ステアリングホイールは、非連続的に、または警報音と連動して振動させる。
ステップS117では、障害物を回避する回避動作モードとして、自動緊急回避操舵モードへ移行する。自動緊急回避操舵モードでは、障害物の位置(第1位置情報)と自車位置(第2位置情報)とに基づき、自車をエスケープゾーンに向けて走行させる目標走行経路を設定し、自車が目標走行経路に沿って自動で走行するように電動パワーステアリング装置8を駆動する自動緊急回避操舵制御を実施する。
ステップS118では、障害物を回避したかを判定する。YESの場合はリターンへ進み、NOの場合はステップS117へ戻る。
実施形態1の車両制御コントローラ4は、外界認識装置1により取得された自車の前方の障害物に関する情報を取得し、取得された障害物の位置と自車位置と、に基づいて、電動パワーステアリング装置8の制御によって障害物を回避する自動緊急回避操舵モードに移行する際に、運転者に対して、ステアリングホイールに触れぬよう促すための報知をするように報知部15を制御する第1報知指令を出力する(S114,S116)。従来は、自動緊急回避操舵の実行前に運転者に報知するだけであったが、実施形態1では、自動緊急回避操舵の実行前に運転者にステアリングホイールに触れないよう報知することにより、運転者がステアリングホイールに触れている状態で自動緊急回避操舵が実行されるのを抑制できる。これにより、運転者が自動緊急回避操舵の妨げとなるのを抑制できる。
車両制御コントローラ4は、外界認識装置1より取得された外界情報に基づいて求められた自車の目標走行経路を取得し、目標走行経路に沿って自車が走行するように、自車の電動パワーステアリング装置8、エンジン9およびブレーキシステム10を制御する運転支援制御を実行し、運転支援制御が実行されている状態で、自動緊急回避操舵モードに移行する際に、第1報知指令を出力する。これにより、運転支援制御中に出現した障害物に対する自動緊急回避操舵が運転者に妨げられるのを抑制できる。
第1報知指令は、運転者に対して視覚的報知または聴覚的報知をするために報知部15(HUD装置11、音声発話装置12、警報装置13)を制御する指令を含む(S116)。振動的報知に加えて、視覚的報知または聴覚的報知を行うことにより、運転者のステアリングホイールからの手離しをより促進できる。
第1報知指令は、振動的報知と聴覚的報知としての警報音と、を連動させて報知部15(ステアリング振動装置14、警報装置13)を制御する指令である。振動的報知と聴覚的報知とを連動させることにより、報知を気付かせやすくなるため、運転者のステアリングホイールからの手離しをより促進できる。
第1報知指令は、振動的報知を非連続的に行うために報知部15(ステアリング振動装置14)を制御する指令である。ここで、仮に振動的報知を連続的に行った場合、ロードノイズと誤認識して報知に気付かないおそれがある。そこで、振動的報知を非連続的に行うことにより、ロードノイズと誤認識されるのを抑制でき、運転者のステアリングホイールからの手離しをより促進できる。
車両制御コントローラ4は、第1報知指令として、運転者に対し視覚的報知または聴覚的報知をするために報知部15(HUD装置11、音声発話装置12、警報装置13)を制御する指令を出力し、第2所定時間経過後にステアリングホイールに触れている場合には、ステアリングホイールに振動を与える振動的報知をするために報知部15(ステアリング振動装置14)を制御する指令を出力する。報知を2段階で行い、かつ、2回目は1回目よりも強い報知(運転者がより気付きやすい報知)を行うことにより、運転者のステアリングホイールからの手離しをより促進できる。
第1報知指令は、ステアリングホイールに振動を与える振動的報知をするために報知部15(ステアリング振動装置14)を制御する指令であり、第2報知指令は、運転者に対して視覚的報知または聴覚的報知をするために報知部15(HUD装置11、音声発話装置12、警報装置13)を制御する指令である。ここで、運転者がステアリングホイールを握って操作している場合に、ステアリングホイールを振動させると、運転者は振動に伴う動揺から誤って手を離してしまうおそれがある。そこで、運転者回避操舵モードに遷移する場合には、振動的報知を実施しないことにより、運転者が誤ってステアリングホイールから手を離すのを抑制できる。
車両制御コントローラ4は、第2報知指令を出力後、回避動作モードが運転者回避操舵モードに遷移していない場合、第1報知指令を出力する。これにより、運転者が報知に気付かない場合、または運転者の手動操作による障害物回避が不可能となった場合には、運転者回避操舵モードをキャンセルして自動緊急回避操舵モードへ移行することを運転者に報知でき、運転者のステアリングホイールからの手離しを促進できる。
以上、本発明を実施するための実施形態を説明したが、本発明の具体的な構成は実施形態の構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
本発明は、ステアリングホイールと前輪(の操舵機構)とが機械的に連結された操舵装置を搭載した車両に適用した場合に、特に顕著な効果を奏するが、本発明は、ステアリングホイールと前輪とが機械的に切り離された、いわゆるステア・バイ・ワイヤ方式の操舵装置を搭載した車両にも適用可能であり、実施形態と同様の作用効果を奏する。
実施形態では、運転支援制御が実行されている状態で、自動緊急回避操舵モードに移行する際に、運転者に対して、ステアリングホイールに触れぬよう促すための報知をするように報知部を制御する第1報知指令を出力する例を示したが、運転支援制御が実行されていない状態から、自動緊急回避操舵モードに移行する際に、運転者に対して、ステアリングホイールに触れぬよう促すための報知をするように報知部を制御する第1報知指令を出力してもよい。
車両制御装置は、その一つの態様において、車両の運転者に対して報知を行う報知部を備えた前記車両に設けられ、入力された情報に基づいて演算を行い、演算した結果を前記報知部に出力するコントロール部を備える車両制御装置であって、前記コントロール部は、外界認識部により取得された前記車両の前方の障害物に関する情報を取得し、取得された前記障害部の位置に関する第1位置情報と、前記車両の位置に関する第2位置情報と、に基づいて、前記車両の操舵アクチュエータの制御によって前記障害物を回避する自動緊急回避操舵モードに移行する際に、前記運転者に対して、前記ステアリングホイールに触れぬよう促すための報知をするように前記報知部を制御する第1報知指令を出力する。
より好ましい態様では、上記態様において、前記コントロール部は、前記外界認識部より取得された外界情報に基づいて求められた前記車両が走行する目標走行経路を取得し、前記目標走行経路に沿って前記車両が走行するように、前記車両の駆動アクチュエータ、制動アクチュエータおよび前記操舵アクチュエータを制御する運転支援制御を実行し、前記運転支援制御が実行されている状態で、前記自動緊急回避操舵モードに移行する際に、前記第1報知指令を出力する。
さらに別の好ましい態様では、上記態様のいずれかにおいて、前記第1報知指令は、前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令を含む。
さらに別の好ましい態様では、上記態様のいずれかにおいて、前記第1報知指令は、前記振動的報知と、前記聴覚的報知としての警報音と、を連動させて前記報知部を制御する指令である。
さらに別の好ましい態様では、上記態様のいずれかにおいて、前記第1報知指令は、前記振動的報知と、前記聴覚的報知としての警報音および音声報知と、をするために前記報知部を制御する指令である。
さらに別の好ましい態様では、上記態様のいずれかにおいて、前記第1報知指令は、前記振動的報知を非連続的に行うために前記報知部を制御する指令である。
さらに別の好ましい態様では、上記態様のいずれかにおいて、前記コントロール部は、前記第1報知指令として、前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令を出力し、所定時間経過後に前記運転者が前記ステアリングホイールに触れている場合には、前記ステアリングホイールに振動を与える振動的報知をするために前記報知部を制御する指令を出力する。
さらに別の好ましい態様では、上記態様のいずれかにおいて、前記第1報知指令は、前記ステアリングホイールに振動を与える振動的報知をするために前記報知部を制御する指令であり、前記第2報知指令は、前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令である。
さらに別の好ましい態様では、上記態様のいずれかにおいて、前記コントロール部は、前記第2報知指令を出力後、前記回避動作モードが前記運転者回避操舵モードに遷移していない場合、前記第1報知指令を出力する。
好ましくは、上記態様において、前記コントロール部は、前記外界認識部により取得された外界情報に基づいて求められた前記車両が走行する目標走行経路を取得し、前記目標走行経路に沿って前記車両が走行するように、前記車両の駆動アクチュエータ、制動アクチュエータおよび前記操舵アクチュエータを制御する運転支援制御を実行し、前記運転支援制御が実行されている状態で、前記自動緊急回避操舵モードと、前記運転者回避操舵モードと、のいずれかを前記障害物の回避動作モードとして選択する。
別の好ましい態様では、上記態様のいずれかにおいて、前記第1報知指令は、前記ステアリングホイールに振動を与える振動的報知をするために前記報知部を制御する指令であり、前記第2報知指令は、前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令である。
好ましくは、上記態様において、前記外界認識部より取得された外界情報に基づいて求められた前記車両が走行する目標走行経路を取得し、前記目標走行経路に沿って前記車両が走行するように、前記車両の駆動アクチュエータ、制動アクチュエータおよび前記操舵アクチュエータを制御する運転支援制御を実行し、前記運転支援制御が実行されている状態で、前記自動緊急回避操舵モードに移行する際に、前記第1報知指令を出力する。
好ましくは、上記態様において、前記車両の駆動アクチュエータと、前記車両の制動アクチュエータと、を備え、前記コントロール部は、前記外界認識部により取得された外界情報に基づいて求められた前記車両が走行する目標走行経路を取得し、前記目標走行経路に沿って前記車両が走行するように、前記駆動アクチュエータ、前記制動アクチュエータおよび前記操舵アクチュエータを制御する運転支援制御を実行し、前記運転支援制御が実行されている状態で、前記自動緊急回避操舵モードに移行する際に、前記第1報知指令を出力する。
4 車両制御コントローラ(コントロール部)
8 電動パワーステアリング装置(操舵アクチュエータ)
9 エンジン(駆動アクチュエータ)
10 ブレーキシステム(制動アクチェエータ)
15 報知部
Claims (17)
- 車両の運転者に対して報知を行う報知部を備えた前記車両に設けられ、入力された情報に基づいて演算を行い、演算した結果を前記報知部に出力するコントロール部を備える車両制御装置であって、
前記コントロール部は、
外界認識部により取得された前記車両の前方の障害物に関する情報を取得し、
取得された前記障害物の位置に関する第1位置情報と、前記車両の位置に関する第2位置情報と、に基づいて、前記車両の操舵アクチュエータの制御によって前記障害物を回避する自動緊急回避操舵モードに移行する際に、前記運転者に対して、ステアリングホイールに触れぬよう促すための報知をするように前記報知部を制御する第1報知指令を出力するにあたり、
前記第1報知指令として、
前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令を出力し、
所定時間経過後に前記運転者が前記ステアリングホイールに触れている場合には、前記ステアリングホイールに振動を与える振動的報知をするために前記報知部を制御する指令を出力する、
車両制御装置。 - 請求項1に記載の車両制御装置であって、
前記コントロール部は、
前記外界認識部より取得された外界情報に基づいて求められた前記車両が走行する目標走行経路を取得し、
前記目標走行経路に沿って前記車両が走行するように、前記車両の駆動アクチュエータ、制動アクチュエータおよび前記操舵アクチュエータを制御する運転支援制御を実行し、
前記運転支援制御が実行されている状態で、前記自動緊急回避操舵モードに移行する際に、前記第1報知指令を出力する、
車両制御装置。 - 請求項1に記載の車両制御装置であって、
前記第1報知指令は、前記ステアリングホイールに振動を与える振動的報知をするために前記報知部を制御する指令を含む、
車両制御装置。 - 請求項3に記載の車両制御装置であって、
前記第1報知指令は、前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令を含む、
車両制御装置。 - 請求項4に記載の車両制御装置であって、
前記第1報知指令は、前記振動的報知と、前記聴覚的報知としての警報音と、を連動させて前記報知部を制御する指令である、
車両制御装置。 - 請求項4に記載の車両制御装置であって、
前記第1報知指令は、前記振動的報知と、前記聴覚的報知としての警報音および音声報知と、をするために前記報知部を制御する指令である、
車両制御装置。 - 請求項3に記載の車両制御装置であって、
前記第1報知指令は、前記振動的報知を非連続的に行うために前記報知部を制御する指令である、
車両制御装置。 - 請求項2に記載の車両制御装置であって、
前記コントロール部は、
前記運転支援制御が実行されているとき、前記第1位置情報と、前記第2位置情報と、に基づいて、前記自動緊急回避操舵モードと、前記運転者による前記ステアリングホイールの操作によって前記障害物を回避する運転者回避操舵モードと、のいずれかを前記障害物の回避動作モードとして選択し、
前記回避動作モードが前記自動緊急回避操舵モードの場合、前記報知部を制御するための前記第1報知指令を出力し、
前記回避動作モードが前記運転者回避操舵モードの場合、前記第1報知指令とは異なる前記報知部を制御するための第2報知指令を出力する、
車両制御装置。 - 請求項8に記載の車両制御装置であって、
前記第1報知指令は、前記ステアリングホイールに振動を与える振動的報知をするために前記報知部を制御する指令であり、
前記第2報知指令は、前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令である、
車両制御装置。 - 請求項8に記載の車両制御装置であって、
前記コントロール部は、
前記第2報知指令を出力後、前記回避動作モードが前記運転者回避操舵モードに遷移していない場合、前記第1報知指令を出力する、
車両制御装置。 - 車両の運転者に対して報知を行う報知部を備えた前記車両に設けられ、入力された情報に基づいて演算を行い、演算した結果を前記報知部に出力するコントロール部を備える車両制御装置であって、
前記コントロール部は、
外界認識部により取得された前記車両の前方の障害物に関する情報を取得し、
取得された前記障害物の位置に関する第1位置情報と、前記車両の位置に関する第2位置情報と、に基づいて、前記車両の操舵アクチュエータの制御によって前記障害物を回避する自動緊急回避操舵モードと、前記運転者によるステアリングホイールの操作によって前記障害物を回避する運転者回避操舵モードと、のいずれかを前記障害物の回避動作モードとして選択し、
前記回避動作モードが前記自動緊急回避操舵モードの場合、前記報知部を制御するための第1報知指令を出力し、
前記回避動作モードが前記運転者回避操舵モードの場合、前記第1報知指令とは異なる前記報知部を制御するための第2報知指令を出力する、
車両制御装置。 - 請求項11に記載の車両制御装置であって、
前記コントロール部は、
前記外界認識部により取得された外界情報に基づいて求められた前記車両が走行する目標走行経路を取得し、
前記目標走行経路に沿って前記車両が走行するように、前記車両の駆動アクチュエータ、制動アクチュエータおよび前記操舵アクチュエータを制御する運転支援制御を実行し、
前記運転支援制御が実行されている状態で、前記自動緊急回避操舵モードと、前記運転者回避操舵モードと、のいずれかを前記障害物の回避動作モードとして選択する、
車両制御装置。 - 請求項11に記載の車両制御装置であって、
前記第1報知指令は、前記ステアリングホイールに振動を与える振動的報知をするために前記報知部を制御する指令であり、
前記第2報知指令は、前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令である、
車両制御装置。 - 車両の運転者に対して報知を行う報知部を備えた前記車両の車両制御方法であって、
前記車両のコントロール部は、
外界認識部により取得された前記車両の前方の障害物に関する情報を取得し、
取得された前記障害物の位置に関する第1位置情報と、前記車両の位置に関する第2位置情報と、に基づいて、前記車両の操舵アクチュエータの制御によって前記障害物を回避する自動緊急回避操舵モードに移行する際に、前記運転者に対して、ステアリングホイールに触れぬよう促すための報知をするように前記報知部を制御する第1報知指令を出力するにあたり、
前記第1報知指令として、
前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令を出力し、
所定時間経過後に前記運転者が前記ステアリングホイールに触れている場合には、前記ステアリングホイールに振動を与える振動的報知をするために前記報知部を制御する指令を出力する、
車両制御方法。 - 請求項14に記載の車両制御方法であって、
前記コントロール部は、
前記外界認識部より取得された外界情報に基づいて求められた前記車両が走行する目標走行経路を取得し、
前記目標走行経路に沿って前記車両が走行するように、前記車両の駆動アクチュエータ、制動アクチュエータおよび前記操舵アクチュエータを制御する運転支援制御を実行し、
前記運転支援制御が実行されている状態で、前記自動緊急回避操舵モードに移行する際に、前記第1報知指令を出力する、
車両制御方法。 - 車両の運転者に対して報知を行う報知部と、
前記車両の外界情報を取得する外界認識部と、
前記車両の操舵アクチュエータと、
コントロール部であって、
外界認識部により取得された前記車両の前方の障害物に関する情報を取得し、
取得された前記障害物の位置に関する第1位置情報と、前記車両の位置に関する第2位置情報と、に基づいて、前記操舵アクチュエータの制御によって前記障害物を回避する自動緊急回避操舵モードに移行する際に、前記運転者に対して、ステアリングホイールに触れぬよう促すための報知をするように前記報知部を制御する第1報知指令を出力する、
コントロール部と、
を備え、
前記コントロール部は、前記第1報知指令として、
前記運転者に対して視覚的報知または聴覚的報知をするために前記報知部を制御する指令を出力し、
所定時間経過後に前記運転者が前記ステアリングホイールに触れている場合には、前記ステアリングホイールに振動を与える振動的報知をするために前記報知部を制御する指令を出力する、
車両制御システム。 - 請求項16に記載の車両制御システムは、
前記車両の駆動アクチュエータと、
前記車両の制動アクチュエータと、
を備え、
前記コントロール部は、
前記外界認識部により取得された外界情報に基づいて求められた前記車両が走行する目標走行経路を取得し、
前記目標走行経路に沿って前記車両が走行するように、前記駆動アクチュエータ、前記制動アクチュエータおよび前記操舵アクチュエータを制御する運転支援制御を実行し、
前記運転支援制御が実行されている状態で、前記自動緊急回避操舵モードに移行する際に、前記第1報知指令を出力する、
車両制御システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019100370A JP7303666B2 (ja) | 2019-05-29 | 2019-05-29 | 車両制御装置、車両制御方法および車両制御システム |
| US17/435,909 US20220234606A1 (en) | 2019-05-29 | 2020-04-30 | Vehicle control device, vehicle control method, and vehicle control system |
| CN202080019688.1A CN113557560A (zh) | 2019-05-29 | 2020-04-30 | 车辆控制装置、车辆控制方法以及车辆控制系统 |
| PCT/JP2020/018218 WO2020241167A1 (ja) | 2019-05-29 | 2020-04-30 | 車両制御装置、車両制御方法および車両制御システム |
| EP20812689.6A EP3979226A4 (en) | 2019-05-29 | 2020-04-30 | VEHICLE CONTROL DEVICE, VEHICLE CONTROL METHOD AND VEHICLE CONTROL SYSTEM |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019100370A JP7303666B2 (ja) | 2019-05-29 | 2019-05-29 | 車両制御装置、車両制御方法および車両制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020192917A JP2020192917A (ja) | 2020-12-03 |
| JP7303666B2 true JP7303666B2 (ja) | 2023-07-05 |
Family
ID=73546186
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019100370A Active JP7303666B2 (ja) | 2019-05-29 | 2019-05-29 | 車両制御装置、車両制御方法および車両制御システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220234606A1 (ja) |
| EP (1) | EP3979226A4 (ja) |
| JP (1) | JP7303666B2 (ja) |
| CN (1) | CN113557560A (ja) |
| WO (1) | WO2020241167A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114162216B (zh) * | 2022-01-12 | 2023-04-25 | 大运汽车股份有限公司 | 语音辅助转向多模式切换控制方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012208566A (ja) | 2011-03-29 | 2012-10-25 | Denso Corp | 車載制御装置 |
| JP2016137819A (ja) | 2015-01-28 | 2016-08-04 | 日立オートモティブシステムズ株式会社 | 自動運転制御装置 |
| JP2017165216A (ja) | 2016-03-15 | 2017-09-21 | 株式会社Subaru | 車両の走行制御装置 |
| JP2018203012A (ja) | 2017-06-02 | 2018-12-27 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9290186B2 (en) * | 2014-03-10 | 2016-03-22 | Ford Global Technologies, Llc | Messaging via vehicle steering wheel |
| JP6439657B2 (ja) * | 2015-11-09 | 2018-12-19 | 株式会社デンソー | 提示制御装置及び提示制御方法 |
| US10807594B2 (en) | 2016-03-07 | 2020-10-20 | Honda Motor Co., Ltd. | Vehicle control device, vehicle control method, and vehicle control program |
| JP2018144643A (ja) * | 2017-03-06 | 2018-09-20 | トヨタ自動車株式会社 | 報知システム、走行支援システム |
| JP6933369B2 (ja) | 2017-11-29 | 2021-09-08 | 株式会社フジキン | アクチュエータ、バルブ、および流体制御装置 |
-
2019
- 2019-05-29 JP JP2019100370A patent/JP7303666B2/ja active Active
-
2020
- 2020-04-30 WO PCT/JP2020/018218 patent/WO2020241167A1/ja unknown
- 2020-04-30 US US17/435,909 patent/US20220234606A1/en active Pending
- 2020-04-30 EP EP20812689.6A patent/EP3979226A4/en active Pending
- 2020-04-30 CN CN202080019688.1A patent/CN113557560A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012208566A (ja) | 2011-03-29 | 2012-10-25 | Denso Corp | 車載制御装置 |
| JP2016137819A (ja) | 2015-01-28 | 2016-08-04 | 日立オートモティブシステムズ株式会社 | 自動運転制御装置 |
| JP2017165216A (ja) | 2016-03-15 | 2017-09-21 | 株式会社Subaru | 車両の走行制御装置 |
| JP2018203012A (ja) | 2017-06-02 | 2018-12-27 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113557560A (zh) | 2021-10-26 |
| WO2020241167A1 (ja) | 2020-12-03 |
| US20220234606A1 (en) | 2022-07-28 |
| EP3979226A4 (en) | 2022-07-06 |
| JP2020192917A (ja) | 2020-12-03 |
| EP3979226A1 (en) | 2022-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3336643B1 (en) | Autonomous driving system | |
| JP6375237B2 (ja) | 自動運転制御装置 | |
| WO2018211802A1 (ja) | 自動運転支援装置および自動運転支援方法 | |
| US9031729B2 (en) | Method and system for controlling a vehicle | |
| EP1860011B1 (en) | Vehicle driving assist system | |
| JP2017197053A (ja) | 自動運転制御装置 | |
| WO2019188218A1 (ja) | 運転支援システム、運転支援装置、運転支援方法 | |
| JP5855983B2 (ja) | 運転支援装置 | |
| JP2010073134A (ja) | 車両周辺認知支援システム | |
| JP5017039B2 (ja) | 車線変更支援装置 | |
| JP2015516772A (ja) | 携帯型通信装置を使用した自動車の遠隔制御操縦 | |
| JP2013177054A (ja) | 車間距離制御装置 | |
| JP2020104633A (ja) | 車両制御装置 | |
| JP4158796B2 (ja) | 走行支援装置 | |
| JP6489632B2 (ja) | 車両の走行支援装置 | |
| WO2017104330A1 (ja) | 自動運転制御装置および自動運転制御方法 | |
| JP2016196248A (ja) | 情報提示装置 | |
| JP2007196854A (ja) | 運転支援装置および運転支援方法 | |
| JP2018122647A (ja) | 車両用警報装置 | |
| JP2004178367A (ja) | 注意配分制御装置 | |
| JP7303666B2 (ja) | 車両制御装置、車両制御方法および車両制御システム | |
| JP2019148850A (ja) | 車両制御装置 | |
| JP6115529B2 (ja) | 車両の運転支援装置、及び運転支援方法 | |
| JP2007245833A (ja) | 車両の走行制御装置 | |
| JP7212537B2 (ja) | 車両制御装置、車両及び車両制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210603 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220920 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230322 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230623 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7303666 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |