JP2004178367A - 注意配分制御装置 - Google Patents
注意配分制御装置 Download PDFInfo
- Publication number
- JP2004178367A JP2004178367A JP2002345232A JP2002345232A JP2004178367A JP 2004178367 A JP2004178367 A JP 2004178367A JP 2002345232 A JP2002345232 A JP 2002345232A JP 2002345232 A JP2002345232 A JP 2002345232A JP 2004178367 A JP2004178367 A JP 2004178367A
- Authority
- JP
- Japan
- Prior art keywords
- driver
- attention distribution
- attention
- vehicle
- distribution map
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Abstract
【課題】本発明は、運転者がどの程度の注意力をどこに集中させているかを検出し、最適な注意配分を運転者に促がすことが可能な注意配分制御装置の提供を目的とする。
【解決手段】本願発明の注意配分制御装置は、自車両の周辺状況と、自車両の位置や速度を考慮して、最適な注意配分を算出する。さらに、運転者の視線や顔の動きから運転者の注意配分を検出し、前記最適な注意配分と比較することによって、安全に運行するために最適な注意配分を運転者に喚起できることから、運転中は常に安全な注意配分を維持できる。また、最適な注意配分と運転者の注意配分との差分を取って制御することから、コンピュータの処理が容易となり、運転者への警告や通知も明確で間違いないものとすることが可能である。
【選択図】 図1
【解決手段】本願発明の注意配分制御装置は、自車両の周辺状況と、自車両の位置や速度を考慮して、最適な注意配分を算出する。さらに、運転者の視線や顔の動きから運転者の注意配分を検出し、前記最適な注意配分と比較することによって、安全に運行するために最適な注意配分を運転者に喚起できることから、運転中は常に安全な注意配分を維持できる。また、最適な注意配分と運転者の注意配分との差分を取って制御することから、コンピュータの処理が容易となり、運転者への警告や通知も明確で間違いないものとすることが可能である。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、自動車運転時の運転者に最も適切な注意配分状態と、実際の運転者の注意配分状態をあらゆるセンサで推定又は検出し、運転者の注意力を最も適切な状態に維持するよう喚起して、運行の安全を確保する注意配分制御装置に関する。
【0002】
【従来の技術】
従来、車両の周辺の障害物を検出して、その障害物の動きを予測し、同時に視線方向を主とする運転者の状態を検出して、障害物ごとに警報を出力する走行環境監視警報装置が開示されている。警報出力の際、障害物の位置や大きさ、予測された動き、および運転者の状態に応じて警報の種類や質が変更される(特許文献1)。
【0003】
また、運転者の注視点を検出し、その注視点の周辺部所定範囲に別途検出した障害物が存在するか否かに応じて、その障害物に関する情報提供の態様を変更する車両用情報提供装置が開示されている(特許文献2)。これはセンサが検出した障害物を運転者が十分に認知しているかどうかを判断し、認知している場合にはその障害物に関する情報提供を規制するものである。
【0004】
【特許文献1】
特開平11−139229号公報(段落0015〜0018)
【0005】
【特許文献2】
特開2001−357498号公報(段落0008〜0013)
【0006】
【発明が解決しようとする課題】
しかしながら、従来の技術は運転者がセンサによって検出された障害物を認知しているか否かを判断して、情報提供の種類や質を制御するものであるため、運転者がどの程度の注意力をその障害物に集中させているのかを考慮していない。例えば、自車両の非常に近い位置に歩行者、遠方に四輪車が存在していて、運転者は自身の注意力100%のうち各50%の注意力でその歩行者と四輪車を注意していたとすると、従来の技術ではこれらの障害物に対しては安全であることが判断されるのみである。しかしこの場合、実際は運転者はこれらの障害物に気を取られ、進行方向への注意力が不十分な状態、いわゆる脇見運転の状態であり、非常に危険な状態であるといえる。
【0007】
さらに、自車両に非常に近い歩行者と遠方の四輪車との自車両に対する危険度を考慮すると、当然四輪車よりも歩行者により注意が向けられるべきであり、その点においても均等な注意配分は危険な状態であるといえる。
本発明は、運転者がどの程度の注意力をどこに集中させているかを検出し、最適な注意配分を運転者に促がすことが可能な注意配分制御装置の提供を目的とする。
【0008】
【課題を解決するための手段】
上記目的を達成するための本願請求項1に係る発明は、自車両の周辺状況を監視する周辺状況監視センサと、前記自車両の周辺状況に基づいて運転者が注視すべき位置を推定し、自車両周辺領域における運転者の最適な注意配分を示す最適注意配分マップを作成する最適注意配分マップ作成部と、前記自車両周辺領域内において、運転者が注視している位置を検出する注視点検出センサと、前記運転者が注視している位置に基づいて、自車両周辺領域における運転者の注意配分を示す運転者注意配分マップを作成する運転者注意配分マップ作成部とを有し、前記最適注意配分マップと前記運転者注意配分マップとを比較することによって、運転者の注意配分を最適に制御する運転者注意配分制御部を備えたことを特徴とする注意配分制御装置である。
【0009】
また、請求項2に係る発明は、自車両の状態を監視する自車両状態監視センサを有し、前記最適注意配分マップ作成部は、前記自車両の周辺状況及び前記自車両の状態に基づいて運転者が注視すべき位置を推定し、前記最適注意配分マップを作成することを特徴とする請求項1に記載の注意配分制御装置である。
【0010】
また、請求項3に係る発明は、前記運転者注意配分マップ作成部は、少なくとも前記自車両の周辺状況に基づいて推定される運転者が注視すべき位置と、前記注視点検出センサによって検出された前記運転者が注視している位置とを比較して前記運転者注意配分マップを作成することを特徴とする請求項1又は請求項2に記載の注意配分制御装置である。
【0011】
また、請求項4に係る発明は、前記運転者注意配分制御部は、前記最適注意配分マップと前記運転者注意配分マップとの差分を算出し、自車両周辺領域の前記差分が大きい位置を運転者に知らせることによって、運転者の注意配分を最適に制御することを特徴とする請求項1乃至請求項4のいづれか1項に記載の注意配分制御装置である。
【0012】
【作用】
請求項1に係る発明によると、周辺状況監視センサによって自車両の周辺状況を検出して、その情報に基づいて安全を確保するための最適な注意配分マップを作成し、別途注視点検出センサを用いて運転者注意配分マップを作成し、両者を比較することによって、運転者の注意不足の位置や注意過多の位置が明らかとなる。この情報に基づいて運転者に最適な注意配分を促がすことから、常に自車両の周辺状況を把握した安全な運行が可能となる。
【0013】
ここで、自車両の周辺状況とは、自車両周辺の障害物や歩行者等の存在、その大きさ、方位、距離、動きといった情報であり、更には交差点や信号、標識、建物の位置等もこの周辺状況を表す情報である。以下、これらをまとめて障害物等という。また、注視点検出センサは運転者が自車両周辺領域のどこを注視しているかを検出するセンサである。注意配分は運転者の注意力が自車両周辺領域のどの位置にどの程度配分されているかを表すものであり、注意配分マップで表すことが可能である。
【0014】
請求項2に係る発明によると、最適注意配分マップは自車両周辺状況に加えて、自車両の状態をも加味して作成される。これによると、単に自車両の前方を進行方向とするのではなく、自車両の位置や速度、操舵角、ウインカ稼動状況等の情報も考慮して自車両の正確な進行方向を推定し、より信頼性の高い最適注意配分マップを作成することが可能となる。
【0015】
請求項3に係る発明によると、運転者が注視すべき位置と、運転者が注視している位置とを比較して運転者注意配分マップを作成するため、どの障害物等にどの程度の注意力が集中しているかが明確となり、運転者に対して的確に最適な注意配分を促がすことが可能となる。
【0016】
請求項4に係る発明によると、最適注意配分マップと運転者注意配分マップとの差分を算出し、自車両周辺領域の差分が大きい位置を運転者に知らせることから、最も注意力が欠けている位置が明確となり、的確にその位置を運転者に伝えることが可能となる。
【0017】
【発明の実施の形態】
以下、図面を参照しながら本願発明を自動車に適用した場合の実施の形態の概要を説明する。
【0018】
図1は本願発明を構成する要素のうち主要部のみを記載した図である。周辺状況監視センサ11は、自車両の周辺の障害物等の存在状況を監視するセンサである。このセンサによって自車両周辺の障害物等の存在、その大きさ、方位、距離、動きといった属性情報を検出することが可能である。具体的には、このセンサは可視光や赤外線を用いた画像センサであってもよいし、その他レーザレーダや超音波レーダ、ミリ波レーダなども利用可能である。
【0019】
最適注意配分マップ作成部13では、上記周辺状況監視センサ11で検出された自車両の周辺状況のデータに基づいて運転者の注視すべき位置を抽出し、その注視すべき位置の属性情報を基に最適注意配分マップが作成される。その際、自車両の前方を進行方向と推定し、運転者が必ず注視すべき位置の一つとして扱うことができる。一例として、この最適注意配分マップには自車両周辺領域のある障害物等が存在する位置にはA%の注意力が必要で、他の障害物等にはB%、そして自車両前方には残りの100−A−B%の注意力を配分するのが安全である旨の情報が記録される。
【0020】
最適注意配分マップを作成する際には、自車両の状態をも考慮することが好ましい。自車両状態監視センサ12は、自車両の位置や速度、操舵角、ウインカ稼動状態等の情報を出力し、この情報を最適注意配分マップ作成に利用することができる。例えばY字交差点にさしかかった時には、自車両の単なる前方よりも進行していく方向(進行方向)に運転者の注意を集中させる方が安全であり、自車両状態監視センサ12を利用することによってこれらの状況にも対応した最適注意配分マップを作成することが可能となる。
【0021】
一方、注視点検出センサ14は運転者が自車両周辺領域のどの位置を注視しているかを検出し、そのデータは運転者注意配分マップ作成部15に送られ、運転時における運転者の実際の注意配分が示されている運転者注意配分マップが作成される。
【0022】
上記のようにして作成された最適注意配分マップと運転者注意配分マップは、運転者注意配分制御部16において互いに比較される。そして、注意が必要な障害物等に対して運転者の注意力が大きく不足しているときには、運転者注意配分制御部16が運転者にその旨通知し、運転中は常に安全な注意配分を維持するよう制御される。
【0023】
運転者に注意力不足などの情報を提供する方法として、音や音声による通知の他に、車載ディスプレイやヘッドアップディスプレイに表示することも可能である。また、フロントガラスに自車両周辺の風景と重畳させて表示すると、運転者の視線を常に自車両周辺領域に維持できるため、安全であると同時に、運転者注意配分マップの作成精度も向上する。
【0024】
以上が、本願発明を実施する際の一つの実施の形態であるが、以下に各要素における処理の詳細を説明する。図1に示した各要素内の詳細な機能と、図1では省略したその他の付加機能等を詳細に記載したのが図2である。
【0025】
自車両状態監視センサ12の内部には自車両のウインカ稼動状況や操舵角といった自車両状態を検出するセンサが搭載されている。また、自車両の位置や速度、加速度、角速度、角加速度等を検出するセンサ22が搭載されており、自車両位置・動き算出部23において自車両の走行位置やその時の動作状態を算出できる。これらの情報から自車両が将来どちらの方向に移動するかを予測でき、その進行方向を考慮した運転者が注視すべき位置を適切に推定することが可能となる。
【0026】
上記自車両位置・動き算出部23における処理では、注視点検出センサ14で検出される運転者の眼の位置を基準とした障害物等の3次元的位置関係を考慮することも可能である。
【0027】
以上示した自車両の状態を示す情報と周辺状況監視センサ11で検出される周辺状況とが、注視すべき位置算出部24に入力される。注視すべき位置算出部24では周辺状況監視センサ11と自車両位置・動き算出部23からの情報に基づいて、自車両周辺領域においてどこに注意を集中するべきかを算出する。その際、自車両周辺状況に加えて、自車両状態監視センサ12で検出されるウインカ稼動状況などから算出される自車両の進行方向をも考慮すると同時に、ナビゲーション情報やその他のデータベース25を参照して、二股交差点などにおける進行ルートの情報等から早めに運転者の進もうとする道路に対する注視すべき位置を算出することも可能である。
【0028】
最適注意配分マップ作成部13では、注視すべき位置算出部24で算出された結果に基づいて、運転者の最適な注意配分マップを算出する。その際、注意配分データベース26を利用することができる。注意配分データベース26は、障害物等までの距離、その進行方向、速度、進行上の判断等の属性を複数段階に分類し、得られる全パターンについて重み付け係数を与える。ここで、「進行上の判断」とは、注意すべき障害物等が自車両の進行予定ルート上に存在するか否かの判断である。例えば表1に示す注意配分データベースを利用した場合には、障害物等までの距離が近く、接近して来る状態で、その速度が速く、進行上にある場合には重み付け係数は最大となる。逆に、障害物等までの距離が遠く、接近しておらず、速度が遅く、進行上にない場合には重み付け係数は最小となる。同様に表1に示される全81パターンについて重み付け係数を決定しておくことが可能である。
【表1】
 【0029】
【0029】
運転者の全注意力を自車両の進行方向と各障害物等に均等に分配し、障害物等に対してのみ上記重み付け係数を用いて補正をかけ、最適注意配分マップを作成することで、自車両の進行方向に必要な注意力を維持したまま、周囲の障害物等に注意を配っている安全な注意配分が算出できる。
【0030】
次に、運転者注意配分マップの作成について詳細を説明する。
【0031】
本実施形態に示す運転者注意配分マップ作成部15では、注視点検出センサ14で検出した運転者の注視点と注視すべき位置算出部24で算出された注視すべき位置とを比較して運転者注意配分マップを作成する。
【0032】
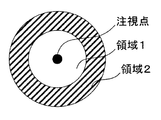
まず、注視点検出センサ14で検出された運転者の注視点から、図3に示すように領域1と領域2が決定される。各領域の面積は運転環境や自車両周辺状況、運転者の性質、熟練度等に応じて決定される。
【0033】
次に、注視すべき位置算出部24で算出された注視すべき位置(自車両進行方向、障害物1、障害物2…、障害物n)がどの注視点のどの領域に入っているかを判断し、視挙動データを作成する。例えばある障害物等の注視すべき位置が領域1に入っているときは1点、領域2に入っていれば0.5点、両方に入っていなければ0点を付けると、表2に示す視挙動データが作成できる。
【表2】
【0034】
このとき、注視点Noは所定のサンプリング周波数で検出される運転者の注視点を順に表したものであり、一般的にこのサンプリング周波数は10Hz〜100Hz程度である。上記表2では運転者の注視点が進行方向から障害物1に、その後障害物nに移り、最後に進行方向に戻ったことがわかる。
【0035】
最後に、表2に記載の視挙動データにおいて、所定の処理単位時間に検出された注視点No.1〜nについてデータを加算し、各注視すべき位置の合計得点から運転者注意配分マップを作成する。注意配分マップは表3に示すように、全注意力に対する各注視すべき位置へ向けられた注意力の割合で表される。
【表3】
【0036】
注視点No.1〜nから運転者注意配分マップを作成した後、n+1番目の注視点を測定する。そして、注視点No.2〜n+1を同様に加算し、その合計得点から同様に運転者注意配分マップを作成する。以降同様に処理が繰り返される。つまり、運転者注意配分マップは注視点を検出するサンプリング周波数と同じ周波数で更新され、処理される。
【0037】
このような方法を用いることにより、中心視だけでなく周辺視でも注意を払うことができる人間の視覚特性を考慮した運転者注意配分マップをリアルタイムで作成することが可能となる。以上説明した運転者注意配分マップをリアルタイムで作成するフローを図4に記載する。
【0038】
なお、連続した注視時間が所定時間以下のデータについては、運転者自らが意図的に注視しようとていた視挙動ではないものとして、その得点は加算しない方法を採用することもできる。これによると、運転者の視線が単に移動している途中の状態を検出された注視点から削除できるので、より正確な運転者注意配分マップを作成することが可能である。
【0039】
上記説明した最適注意配分マップと運転者注意配分マップとを比較して、運転者の注意配分を最適に制御する運転者注意配分制御部16について詳細に説明する。
【0040】
図5に示すように、最適注意配分マップ31と運転者注意配分マップ32との差分をとった場合、その差分の絶対値が大きい位置は、運転者の注意力が不足している位置又は必要以上に注意力を集中している位置である。運転者注意配分制御部16は、これらの差分が大きい位置を運転者に通知し、安全に運行するために最適な注意配分を維持するよう制御する。例えば表3に示された注意配分マップが算出された場合には、障害物1への注意力が過剰で、障害物nへの注意力が極端に不足していることから、運転者へは障害物nを注意するように喚起することになる。
【0041】
さらに具体的に示すと、運転者注意配分制御部16は図6に示すような制御を行う。まず、表3に示すような最適注意配分マップと、運転者注意配分マップを算出する。次に、最適注意配分マップのデータから運転者注意配分マップのデータを差引き、その差引いた値の中の最大値が所定値Z%以内であれば、運転者は最適に近い注意配分を実現していると判断できる。当該最大値が所定値Z%を超えている場合には、その最大値を持つ注視すべき位置に関して運転者に警告する。このような処理により、運転中は常に最適な運転者の注意配分を維持することが可能となる。
【0042】
以上、本願発明の実施の形態を説明したが、本願発明は上記実施形態に限定されるものではない。例えば、最適注意配分マップや運転者注意配分マップは格子状に領域を分割し、各領域単位で注意配分を算出しても構わない。図3に記載の注視点周辺領域を更に細かく分割し、高精度な視挙動データを作成することも可能である。さらに、表3に記載の注意配分マップはパーセント表示に替えて、得点表示や記号で表示することも可能である。
【0043】
【発明の効果】
本願発明の注意配分制御装置を用いると、運転者が特定の障害物等に注意力が集中した場合であっても、安全に運行するために最適な注意配分を運転者に喚起できることから、運転中は常に安全な注意配分を維持でき、自車両の進行方向に向けられる注意力が不十分になる、いわゆる脇見運転等の状態においても、容易に安全な注意配分に復帰することが可能となる。また、最適な注意配分は自車両周辺状況のみでなく、自車両の状態をも考慮して算出されるため、より安全度の高い注意配分を実現できる。さらに、最適注意配分マップと運転者注意配分マップの差分を取って制御することから、コンピュータの処理が容易となり、運転者への警告や通知も明確で間違いないものとすることが可能である。
【図面の簡単な説明】
【図1】本願発明を構成する要素のうち主要部のみを記載した図である。
【図2】各要素内の詳細な機能と、その他の付加機能等を記載した図である。
【図3】運転者の注視点とその周辺領域を示す図である。
【図4】運転者注意配分マップの作成フローを示す図である。
【図5】運転者注意配分制御装置の動作を示す図である。
【図6】運転者注意配分制御装置の動作を詳しく示す図である。
【符号の説明】
11 周辺状況監視センサ
12 自車両状態監視センサ
13 最適注意配分マップ作成部
14 注視点検出センサ
15 運転者注意配分マップ作成部
16 運転者注意配分制御装置
【発明の属する技術分野】
本発明は、自動車運転時の運転者に最も適切な注意配分状態と、実際の運転者の注意配分状態をあらゆるセンサで推定又は検出し、運転者の注意力を最も適切な状態に維持するよう喚起して、運行の安全を確保する注意配分制御装置に関する。
【0002】
【従来の技術】
従来、車両の周辺の障害物を検出して、その障害物の動きを予測し、同時に視線方向を主とする運転者の状態を検出して、障害物ごとに警報を出力する走行環境監視警報装置が開示されている。警報出力の際、障害物の位置や大きさ、予測された動き、および運転者の状態に応じて警報の種類や質が変更される(特許文献1)。
【0003】
また、運転者の注視点を検出し、その注視点の周辺部所定範囲に別途検出した障害物が存在するか否かに応じて、その障害物に関する情報提供の態様を変更する車両用情報提供装置が開示されている(特許文献2)。これはセンサが検出した障害物を運転者が十分に認知しているかどうかを判断し、認知している場合にはその障害物に関する情報提供を規制するものである。
【0004】
【特許文献1】
特開平11−139229号公報(段落0015〜0018)
【0005】
【特許文献2】
特開2001−357498号公報(段落0008〜0013)
【0006】
【発明が解決しようとする課題】
しかしながら、従来の技術は運転者がセンサによって検出された障害物を認知しているか否かを判断して、情報提供の種類や質を制御するものであるため、運転者がどの程度の注意力をその障害物に集中させているのかを考慮していない。例えば、自車両の非常に近い位置に歩行者、遠方に四輪車が存在していて、運転者は自身の注意力100%のうち各50%の注意力でその歩行者と四輪車を注意していたとすると、従来の技術ではこれらの障害物に対しては安全であることが判断されるのみである。しかしこの場合、実際は運転者はこれらの障害物に気を取られ、進行方向への注意力が不十分な状態、いわゆる脇見運転の状態であり、非常に危険な状態であるといえる。
【0007】
さらに、自車両に非常に近い歩行者と遠方の四輪車との自車両に対する危険度を考慮すると、当然四輪車よりも歩行者により注意が向けられるべきであり、その点においても均等な注意配分は危険な状態であるといえる。
本発明は、運転者がどの程度の注意力をどこに集中させているかを検出し、最適な注意配分を運転者に促がすことが可能な注意配分制御装置の提供を目的とする。
【0008】
【課題を解決するための手段】
上記目的を達成するための本願請求項1に係る発明は、自車両の周辺状況を監視する周辺状況監視センサと、前記自車両の周辺状況に基づいて運転者が注視すべき位置を推定し、自車両周辺領域における運転者の最適な注意配分を示す最適注意配分マップを作成する最適注意配分マップ作成部と、前記自車両周辺領域内において、運転者が注視している位置を検出する注視点検出センサと、前記運転者が注視している位置に基づいて、自車両周辺領域における運転者の注意配分を示す運転者注意配分マップを作成する運転者注意配分マップ作成部とを有し、前記最適注意配分マップと前記運転者注意配分マップとを比較することによって、運転者の注意配分を最適に制御する運転者注意配分制御部を備えたことを特徴とする注意配分制御装置である。
【0009】
また、請求項2に係る発明は、自車両の状態を監視する自車両状態監視センサを有し、前記最適注意配分マップ作成部は、前記自車両の周辺状況及び前記自車両の状態に基づいて運転者が注視すべき位置を推定し、前記最適注意配分マップを作成することを特徴とする請求項1に記載の注意配分制御装置である。
【0010】
また、請求項3に係る発明は、前記運転者注意配分マップ作成部は、少なくとも前記自車両の周辺状況に基づいて推定される運転者が注視すべき位置と、前記注視点検出センサによって検出された前記運転者が注視している位置とを比較して前記運転者注意配分マップを作成することを特徴とする請求項1又は請求項2に記載の注意配分制御装置である。
【0011】
また、請求項4に係る発明は、前記運転者注意配分制御部は、前記最適注意配分マップと前記運転者注意配分マップとの差分を算出し、自車両周辺領域の前記差分が大きい位置を運転者に知らせることによって、運転者の注意配分を最適に制御することを特徴とする請求項1乃至請求項4のいづれか1項に記載の注意配分制御装置である。
【0012】
【作用】
請求項1に係る発明によると、周辺状況監視センサによって自車両の周辺状況を検出して、その情報に基づいて安全を確保するための最適な注意配分マップを作成し、別途注視点検出センサを用いて運転者注意配分マップを作成し、両者を比較することによって、運転者の注意不足の位置や注意過多の位置が明らかとなる。この情報に基づいて運転者に最適な注意配分を促がすことから、常に自車両の周辺状況を把握した安全な運行が可能となる。
【0013】
ここで、自車両の周辺状況とは、自車両周辺の障害物や歩行者等の存在、その大きさ、方位、距離、動きといった情報であり、更には交差点や信号、標識、建物の位置等もこの周辺状況を表す情報である。以下、これらをまとめて障害物等という。また、注視点検出センサは運転者が自車両周辺領域のどこを注視しているかを検出するセンサである。注意配分は運転者の注意力が自車両周辺領域のどの位置にどの程度配分されているかを表すものであり、注意配分マップで表すことが可能である。
【0014】
請求項2に係る発明によると、最適注意配分マップは自車両周辺状況に加えて、自車両の状態をも加味して作成される。これによると、単に自車両の前方を進行方向とするのではなく、自車両の位置や速度、操舵角、ウインカ稼動状況等の情報も考慮して自車両の正確な進行方向を推定し、より信頼性の高い最適注意配分マップを作成することが可能となる。
【0015】
請求項3に係る発明によると、運転者が注視すべき位置と、運転者が注視している位置とを比較して運転者注意配分マップを作成するため、どの障害物等にどの程度の注意力が集中しているかが明確となり、運転者に対して的確に最適な注意配分を促がすことが可能となる。
【0016】
請求項4に係る発明によると、最適注意配分マップと運転者注意配分マップとの差分を算出し、自車両周辺領域の差分が大きい位置を運転者に知らせることから、最も注意力が欠けている位置が明確となり、的確にその位置を運転者に伝えることが可能となる。
【0017】
【発明の実施の形態】
以下、図面を参照しながら本願発明を自動車に適用した場合の実施の形態の概要を説明する。
【0018】
図1は本願発明を構成する要素のうち主要部のみを記載した図である。周辺状況監視センサ11は、自車両の周辺の障害物等の存在状況を監視するセンサである。このセンサによって自車両周辺の障害物等の存在、その大きさ、方位、距離、動きといった属性情報を検出することが可能である。具体的には、このセンサは可視光や赤外線を用いた画像センサであってもよいし、その他レーザレーダや超音波レーダ、ミリ波レーダなども利用可能である。
【0019】
最適注意配分マップ作成部13では、上記周辺状況監視センサ11で検出された自車両の周辺状況のデータに基づいて運転者の注視すべき位置を抽出し、その注視すべき位置の属性情報を基に最適注意配分マップが作成される。その際、自車両の前方を進行方向と推定し、運転者が必ず注視すべき位置の一つとして扱うことができる。一例として、この最適注意配分マップには自車両周辺領域のある障害物等が存在する位置にはA%の注意力が必要で、他の障害物等にはB%、そして自車両前方には残りの100−A−B%の注意力を配分するのが安全である旨の情報が記録される。
【0020】
最適注意配分マップを作成する際には、自車両の状態をも考慮することが好ましい。自車両状態監視センサ12は、自車両の位置や速度、操舵角、ウインカ稼動状態等の情報を出力し、この情報を最適注意配分マップ作成に利用することができる。例えばY字交差点にさしかかった時には、自車両の単なる前方よりも進行していく方向(進行方向)に運転者の注意を集中させる方が安全であり、自車両状態監視センサ12を利用することによってこれらの状況にも対応した最適注意配分マップを作成することが可能となる。
【0021】
一方、注視点検出センサ14は運転者が自車両周辺領域のどの位置を注視しているかを検出し、そのデータは運転者注意配分マップ作成部15に送られ、運転時における運転者の実際の注意配分が示されている運転者注意配分マップが作成される。
【0022】
上記のようにして作成された最適注意配分マップと運転者注意配分マップは、運転者注意配分制御部16において互いに比較される。そして、注意が必要な障害物等に対して運転者の注意力が大きく不足しているときには、運転者注意配分制御部16が運転者にその旨通知し、運転中は常に安全な注意配分を維持するよう制御される。
【0023】
運転者に注意力不足などの情報を提供する方法として、音や音声による通知の他に、車載ディスプレイやヘッドアップディスプレイに表示することも可能である。また、フロントガラスに自車両周辺の風景と重畳させて表示すると、運転者の視線を常に自車両周辺領域に維持できるため、安全であると同時に、運転者注意配分マップの作成精度も向上する。
【0024】
以上が、本願発明を実施する際の一つの実施の形態であるが、以下に各要素における処理の詳細を説明する。図1に示した各要素内の詳細な機能と、図1では省略したその他の付加機能等を詳細に記載したのが図2である。
【0025】
自車両状態監視センサ12の内部には自車両のウインカ稼動状況や操舵角といった自車両状態を検出するセンサが搭載されている。また、自車両の位置や速度、加速度、角速度、角加速度等を検出するセンサ22が搭載されており、自車両位置・動き算出部23において自車両の走行位置やその時の動作状態を算出できる。これらの情報から自車両が将来どちらの方向に移動するかを予測でき、その進行方向を考慮した運転者が注視すべき位置を適切に推定することが可能となる。
【0026】
上記自車両位置・動き算出部23における処理では、注視点検出センサ14で検出される運転者の眼の位置を基準とした障害物等の3次元的位置関係を考慮することも可能である。
【0027】
以上示した自車両の状態を示す情報と周辺状況監視センサ11で検出される周辺状況とが、注視すべき位置算出部24に入力される。注視すべき位置算出部24では周辺状況監視センサ11と自車両位置・動き算出部23からの情報に基づいて、自車両周辺領域においてどこに注意を集中するべきかを算出する。その際、自車両周辺状況に加えて、自車両状態監視センサ12で検出されるウインカ稼動状況などから算出される自車両の進行方向をも考慮すると同時に、ナビゲーション情報やその他のデータベース25を参照して、二股交差点などにおける進行ルートの情報等から早めに運転者の進もうとする道路に対する注視すべき位置を算出することも可能である。
【0028】
最適注意配分マップ作成部13では、注視すべき位置算出部24で算出された結果に基づいて、運転者の最適な注意配分マップを算出する。その際、注意配分データベース26を利用することができる。注意配分データベース26は、障害物等までの距離、その進行方向、速度、進行上の判断等の属性を複数段階に分類し、得られる全パターンについて重み付け係数を与える。ここで、「進行上の判断」とは、注意すべき障害物等が自車両の進行予定ルート上に存在するか否かの判断である。例えば表1に示す注意配分データベースを利用した場合には、障害物等までの距離が近く、接近して来る状態で、その速度が速く、進行上にある場合には重み付け係数は最大となる。逆に、障害物等までの距離が遠く、接近しておらず、速度が遅く、進行上にない場合には重み付け係数は最小となる。同様に表1に示される全81パターンについて重み付け係数を決定しておくことが可能である。
【表1】
運転者の全注意力を自車両の進行方向と各障害物等に均等に分配し、障害物等に対してのみ上記重み付け係数を用いて補正をかけ、最適注意配分マップを作成することで、自車両の進行方向に必要な注意力を維持したまま、周囲の障害物等に注意を配っている安全な注意配分が算出できる。
【0030】
次に、運転者注意配分マップの作成について詳細を説明する。
【0031】
本実施形態に示す運転者注意配分マップ作成部15では、注視点検出センサ14で検出した運転者の注視点と注視すべき位置算出部24で算出された注視すべき位置とを比較して運転者注意配分マップを作成する。
【0032】
まず、注視点検出センサ14で検出された運転者の注視点から、図3に示すように領域1と領域2が決定される。各領域の面積は運転環境や自車両周辺状況、運転者の性質、熟練度等に応じて決定される。
【0033】
次に、注視すべき位置算出部24で算出された注視すべき位置(自車両進行方向、障害物1、障害物2…、障害物n)がどの注視点のどの領域に入っているかを判断し、視挙動データを作成する。例えばある障害物等の注視すべき位置が領域1に入っているときは1点、領域2に入っていれば0.5点、両方に入っていなければ0点を付けると、表2に示す視挙動データが作成できる。
【表2】
このとき、注視点Noは所定のサンプリング周波数で検出される運転者の注視点を順に表したものであり、一般的にこのサンプリング周波数は10Hz〜100Hz程度である。上記表2では運転者の注視点が進行方向から障害物1に、その後障害物nに移り、最後に進行方向に戻ったことがわかる。
【0035】
最後に、表2に記載の視挙動データにおいて、所定の処理単位時間に検出された注視点No.1〜nについてデータを加算し、各注視すべき位置の合計得点から運転者注意配分マップを作成する。注意配分マップは表3に示すように、全注意力に対する各注視すべき位置へ向けられた注意力の割合で表される。
【表3】
注視点No.1〜nから運転者注意配分マップを作成した後、n+1番目の注視点を測定する。そして、注視点No.2〜n+1を同様に加算し、その合計得点から同様に運転者注意配分マップを作成する。以降同様に処理が繰り返される。つまり、運転者注意配分マップは注視点を検出するサンプリング周波数と同じ周波数で更新され、処理される。
【0037】
このような方法を用いることにより、中心視だけでなく周辺視でも注意を払うことができる人間の視覚特性を考慮した運転者注意配分マップをリアルタイムで作成することが可能となる。以上説明した運転者注意配分マップをリアルタイムで作成するフローを図4に記載する。
【0038】
なお、連続した注視時間が所定時間以下のデータについては、運転者自らが意図的に注視しようとていた視挙動ではないものとして、その得点は加算しない方法を採用することもできる。これによると、運転者の視線が単に移動している途中の状態を検出された注視点から削除できるので、より正確な運転者注意配分マップを作成することが可能である。
【0039】
上記説明した最適注意配分マップと運転者注意配分マップとを比較して、運転者の注意配分を最適に制御する運転者注意配分制御部16について詳細に説明する。
【0040】
図5に示すように、最適注意配分マップ31と運転者注意配分マップ32との差分をとった場合、その差分の絶対値が大きい位置は、運転者の注意力が不足している位置又は必要以上に注意力を集中している位置である。運転者注意配分制御部16は、これらの差分が大きい位置を運転者に通知し、安全に運行するために最適な注意配分を維持するよう制御する。例えば表3に示された注意配分マップが算出された場合には、障害物1への注意力が過剰で、障害物nへの注意力が極端に不足していることから、運転者へは障害物nを注意するように喚起することになる。
【0041】
さらに具体的に示すと、運転者注意配分制御部16は図6に示すような制御を行う。まず、表3に示すような最適注意配分マップと、運転者注意配分マップを算出する。次に、最適注意配分マップのデータから運転者注意配分マップのデータを差引き、その差引いた値の中の最大値が所定値Z%以内であれば、運転者は最適に近い注意配分を実現していると判断できる。当該最大値が所定値Z%を超えている場合には、その最大値を持つ注視すべき位置に関して運転者に警告する。このような処理により、運転中は常に最適な運転者の注意配分を維持することが可能となる。
【0042】
以上、本願発明の実施の形態を説明したが、本願発明は上記実施形態に限定されるものではない。例えば、最適注意配分マップや運転者注意配分マップは格子状に領域を分割し、各領域単位で注意配分を算出しても構わない。図3に記載の注視点周辺領域を更に細かく分割し、高精度な視挙動データを作成することも可能である。さらに、表3に記載の注意配分マップはパーセント表示に替えて、得点表示や記号で表示することも可能である。
【0043】
【発明の効果】
本願発明の注意配分制御装置を用いると、運転者が特定の障害物等に注意力が集中した場合であっても、安全に運行するために最適な注意配分を運転者に喚起できることから、運転中は常に安全な注意配分を維持でき、自車両の進行方向に向けられる注意力が不十分になる、いわゆる脇見運転等の状態においても、容易に安全な注意配分に復帰することが可能となる。また、最適な注意配分は自車両周辺状況のみでなく、自車両の状態をも考慮して算出されるため、より安全度の高い注意配分を実現できる。さらに、最適注意配分マップと運転者注意配分マップの差分を取って制御することから、コンピュータの処理が容易となり、運転者への警告や通知も明確で間違いないものとすることが可能である。
【図面の簡単な説明】
【図1】本願発明を構成する要素のうち主要部のみを記載した図である。
【図2】各要素内の詳細な機能と、その他の付加機能等を記載した図である。
【図3】運転者の注視点とその周辺領域を示す図である。
【図4】運転者注意配分マップの作成フローを示す図である。
【図5】運転者注意配分制御装置の動作を示す図である。
【図6】運転者注意配分制御装置の動作を詳しく示す図である。
【符号の説明】
11 周辺状況監視センサ
12 自車両状態監視センサ
13 最適注意配分マップ作成部
14 注視点検出センサ
15 運転者注意配分マップ作成部
16 運転者注意配分制御装置
Claims (4)
- 自車両の周辺状況を監視する周辺状況監視センサと、
前記自車両の周辺状況に基づいて運転者が注視すべき位置を推定し、自車両周辺領域における運転者の最適な注意配分を示す最適注意配分マップを作成する最適注意配分マップ作成部と、
前記自車両周辺領域内において、運転者が注視している位置を検出する注視点検出センサと、
前記運転者が注視している位置に基づいて、自車両周辺領域における運転者の注意配分を示す運転者注意配分マップを作成する運転者注意配分マップ作成部とを有し、
前記最適注意配分マップと前記運転者注意配分マップとを比較することによって、運転者の注意配分を最適に制御する運転者注意配分制御部を備えたことを特徴とする注意配分制御装置。 - 自車両の状態を監視する自車両状態監視センサを有し、
前記最適注意配分マップ作成部は、前記自車両の周辺状況及び前記自車両の状態に基づいて運転者が注視すべき位置を推定し、前記最適注意配分マップを作成することを特徴とする請求項1に記載の注意配分制御装置。 - 前記運転者注意配分マップ作成部は、
少なくとも前記自車両の周辺状況に基づいて推定される運転者が注視すべき位置と、前記注視点検出センサによって検出された前記運転者が注視している位置とを比較して前記運転者注意配分マップを作成することを特徴とする請求項1又は請求項2に記載の注意配分制御装置。 - 前記運転者注意配分制御部は、前記最適注意配分マップと前記運転者注意配分マップとの差分を算出し、自車両周辺領域の前記差分が大きい位置を運転者に知らせることによって、運転者の注意配分を最適に制御することを特徴とする請求項1乃至請求項4のいづれか1項に記載の注意配分制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002345232A JP2004178367A (ja) | 2002-11-28 | 2002-11-28 | 注意配分制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002345232A JP2004178367A (ja) | 2002-11-28 | 2002-11-28 | 注意配分制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004178367A true JP2004178367A (ja) | 2004-06-24 |
Family
ID=32706458
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002345232A Pending JP2004178367A (ja) | 2002-11-28 | 2002-11-28 | 注意配分制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004178367A (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005267108A (ja) * | 2004-03-17 | 2005-09-29 | Denso Corp | 運転支援装置 |
| JP2006318049A (ja) * | 2005-05-10 | 2006-11-24 | Fuji Heavy Ind Ltd | 車両の運転支援装置 |
| JP2007133692A (ja) * | 2005-11-10 | 2007-05-31 | Toyota Motor Corp | 運転行動評価装置 |
| JP2008213823A (ja) * | 2007-02-06 | 2008-09-18 | Denso Corp | 車両用制御装置 |
| WO2010016244A1 (ja) | 2008-08-05 | 2010-02-11 | パナソニック株式会社 | 運転注意量判定装置、方法およびプログラム |
| WO2010032491A1 (ja) * | 2008-09-19 | 2010-03-25 | パナソニック株式会社 | 注意散漫検出装置、注意散漫検出方法およびコンピュータプログラム |
| US7710243B2 (en) | 2005-06-28 | 2010-05-04 | Honda Motor Co., Ltd. | Driver-assistance vehicle |
| WO2011045936A1 (ja) | 2009-10-15 | 2011-04-21 | パナソニック株式会社 | 運転注意量判別装置、方法、および、コンピュータプログラム |
| JP2011161137A (ja) * | 2010-02-15 | 2011-08-25 | Hitachi Ltd | 疲労度評価システムおよびそれを用いた企業内疲労度評価システム並びに疲労度評価方法 |
| US8068968B2 (en) | 2007-02-06 | 2011-11-29 | Denso Corporation | Vehicle travel control system |
| JP2012103849A (ja) * | 2010-11-09 | 2012-05-31 | Denso Corp | 情報提供装置 |
| JP2012103850A (ja) * | 2010-11-09 | 2012-05-31 | Denso Corp | 注視点推定装置 |
| JP2015026004A (ja) * | 2013-07-29 | 2015-02-05 | いすゞ自動車株式会社 | 視認行動評価装置 |
| CN104665848A (zh) * | 2013-11-28 | 2015-06-03 | 现代摩比斯株式会社 | 驾驶员状态感知装置及其方法 |
| CN106714688A (zh) * | 2014-09-21 | 2017-05-24 | 易安迪机车公司 | 操作者疲劳监测系统 |
| JP2021513144A (ja) * | 2018-01-29 | 2021-05-20 | ホアウェイ・テクノロジーズ・カンパニー・リミテッド | 一次プレビュー領域および注視ベースのドライバの注意散漫検出 |
| JP2022537143A (ja) * | 2019-06-10 | 2022-08-24 | 華為技術有限公司 | ヒートマップを使用したドライバーの注目の検出 |
| US20220326021A1 (en) * | 2021-03-18 | 2022-10-13 | Mitsubishi Electric Corporation | Course generation apparatus and vehicle control apparatus |
-
2002
- 2002-11-28 JP JP2002345232A patent/JP2004178367A/ja active Pending
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005267108A (ja) * | 2004-03-17 | 2005-09-29 | Denso Corp | 運転支援装置 |
| US7519459B2 (en) | 2004-03-17 | 2009-04-14 | Denso Corporation | Driving assistance system |
| JP2006318049A (ja) * | 2005-05-10 | 2006-11-24 | Fuji Heavy Ind Ltd | 車両の運転支援装置 |
| JP4647387B2 (ja) * | 2005-05-10 | 2011-03-09 | 富士重工業株式会社 | 車両の運転支援装置 |
| US7710243B2 (en) | 2005-06-28 | 2010-05-04 | Honda Motor Co., Ltd. | Driver-assistance vehicle |
| JP2007133692A (ja) * | 2005-11-10 | 2007-05-31 | Toyota Motor Corp | 運転行動評価装置 |
| JP2008213823A (ja) * | 2007-02-06 | 2008-09-18 | Denso Corp | 車両用制御装置 |
| US8068968B2 (en) | 2007-02-06 | 2011-11-29 | Denso Corporation | Vehicle travel control system |
| WO2010016244A1 (ja) | 2008-08-05 | 2010-02-11 | パナソニック株式会社 | 運転注意量判定装置、方法およびプログラム |
| WO2010032491A1 (ja) * | 2008-09-19 | 2010-03-25 | パナソニック株式会社 | 注意散漫検出装置、注意散漫検出方法およびコンピュータプログラム |
| JP4500369B2 (ja) * | 2008-09-19 | 2010-07-14 | パナソニック株式会社 | 注意散漫検出装置、注意散漫検出方法およびコンピュータプログラム |
| US8239015B2 (en) | 2008-09-19 | 2012-08-07 | Panasonic Corporation | Distraction detection apparatus, distraction detection method, and computer program |
| CN101980660B (zh) * | 2008-09-19 | 2013-01-16 | 松下电器产业株式会社 | 注意力分散检测装置、及注意力分散检测方法 |
| JPWO2010032491A1 (ja) * | 2008-09-19 | 2012-02-09 | パナソニック株式会社 | 注意散漫検出装置、注意散漫検出方法およびコンピュータプログラム |
| US9117124B2 (en) | 2009-10-15 | 2015-08-25 | Panasonic intellectual property Management co., Ltd | Driving attention amount determination device, method, and computer program |
| WO2011045936A1 (ja) | 2009-10-15 | 2011-04-21 | パナソニック株式会社 | 運転注意量判別装置、方法、および、コンピュータプログラム |
| US8730326B2 (en) | 2009-10-15 | 2014-05-20 | Panasonic Corporation | Driving attention amount determination device, method, and computer program |
| JP2011161137A (ja) * | 2010-02-15 | 2011-08-25 | Hitachi Ltd | 疲労度評価システムおよびそれを用いた企業内疲労度評価システム並びに疲労度評価方法 |
| JP2012103849A (ja) * | 2010-11-09 | 2012-05-31 | Denso Corp | 情報提供装置 |
| JP2012103850A (ja) * | 2010-11-09 | 2012-05-31 | Denso Corp | 注視点推定装置 |
| JP2015026004A (ja) * | 2013-07-29 | 2015-02-05 | いすゞ自動車株式会社 | 視認行動評価装置 |
| CN104665848A (zh) * | 2013-11-28 | 2015-06-03 | 现代摩比斯株式会社 | 驾驶员状态感知装置及其方法 |
| CN106714688B (zh) * | 2014-09-21 | 2023-09-29 | 前进轨道机车公司 | 操作者疲劳监测系统 |
| CN106714688A (zh) * | 2014-09-21 | 2017-05-24 | 易安迪机车公司 | 操作者疲劳监测系统 |
| JP2021513144A (ja) * | 2018-01-29 | 2021-05-20 | ホアウェイ・テクノロジーズ・カンパニー・リミテッド | 一次プレビュー領域および注視ベースのドライバの注意散漫検出 |
| JP7140450B2 (ja) | 2018-01-29 | 2022-09-21 | ホアウェイ・テクノロジーズ・カンパニー・リミテッド | 一次プレビュー領域および注視ベースのドライバの注意散漫検出 |
| JP7332726B2 (ja) | 2019-06-10 | 2023-08-23 | 華為技術有限公司 | ヒートマップを使用したドライバーの注目の検出 |
| JP2022537143A (ja) * | 2019-06-10 | 2022-08-24 | 華為技術有限公司 | ヒートマップを使用したドライバーの注目の検出 |
| US20220326021A1 (en) * | 2021-03-18 | 2022-10-13 | Mitsubishi Electric Corporation | Course generation apparatus and vehicle control apparatus |
| US11754402B2 (en) * | 2021-03-18 | 2023-09-12 | Mitsubishi Electric Corporation | Course generation apparatus and vehicle control apparatus |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11151876B2 (en) | Apparatus and method of safety support for vehicle | |
| US11590890B2 (en) | Method and system for augmented alerting based on driver's state in hybrid driving | |
| US11164459B2 (en) | Apparatus and method of safety support for vehicle | |
| JP2004178367A (ja) | 注意配分制御装置 | |
| JP6342856B2 (ja) | 車両制御装置 | |
| EP2188168B1 (en) | Operating method and system for supporting lane keeping of a vehicle | |
| CN111373335A (zh) | 用于混合驾驶中基于自身觉知性能参数的驾驶模式切换的方法和系统 | |
| CN111699521A (zh) | 用于混合驾驶中基于驾驶者状态的驾驶模式切换的方法和系统 | |
| JP2017033542A (ja) | 情報表示装置 | |
| CN114072865A (zh) | 信息处理装置、移动装置、方法和程序 | |
| JP2019087139A (ja) | 車両制御装置 | |
| CN111372830A (zh) | 用于混合驾驶中基于风险的驾驶模式切换的方法和系统 | |
| JP2020163986A (ja) | 車両制御システム | |
| CN111615722A (zh) | 用于切换驾驶模式中的风险控制的方法和系统 | |
| US11897482B2 (en) | Autonomous vehicle control for changing grip completion status in real-time to prevent unnecessary warning issuance | |
| WO2023007844A1 (ja) | 情報処理装置及び情報処理システム | |
| CA3083411C (en) | Method and system for adapting augmented switching warning | |
| JP2023083085A (ja) | オペレータ支援方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050614 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070213 |
|
| A02 | Decision of refusal |
Effective date: 20070703 Free format text: JAPANESE INTERMEDIATE CODE: A02 |