JP7197832B2 - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- JP7197832B2 JP7197832B2 JP2019082578A JP2019082578A JP7197832B2 JP 7197832 B2 JP7197832 B2 JP 7197832B2 JP 2019082578 A JP2019082578 A JP 2019082578A JP 2019082578 A JP2019082578 A JP 2019082578A JP 7197832 B2 JP7197832 B2 JP 7197832B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- controller
- lane
- crossing
- route
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18145—Cornering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18159—Traversing an intersection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/06—Improving the dynamic response of the control system, e.g. improving the speed of regulation or avoiding hunting or overshoot
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/06—Improving the dynamic response of the control system, e.g. improving the speed of regulation or avoiding hunting or overshoot
- B60W2050/065—Improving the dynamic response of the control system, e.g. improving the speed of regulation or avoiding hunting or overshoot by reducing the computational load on the digital processor of the control computer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4042—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle for navigation systems
Description
この構成によれば、自車両を仮想壁の手前で停止させるための経路候補を含め、多様な経路候補を設定することができる。この結果、より確実に交差車両との衝突を回避可能な経路候補を設定することができる。
交差車線を通過し終えた自車両、又は、交差車線に合流し終えた自車両は、交差車両との衝突を回避することができる。つまり、「自車両が、交差車両が走行している交差車線を通過し終えるのに要する時間、又は、交差車両が走行している交差車線に合流し終えるのに要する時間」とは、自車両が交差車両との衝突を回避できる位置まで移動し終えるのに要する時間を意味する。
上記構成によれば、コントローラは、仮想壁の長さを、交差車両との衝突を回避できる位置まで自車両が移動し終えるのに要する時間に応じたものに設定することができる。このような長さを有する仮想壁を設定することにより、自車両と交差車両との衝突を確実に回避することができる。
この構成によれば、コントローラは、仮想壁の長さを、交差車両との衝突を回避できる位置まで自車両が移動し終えるのに要する時間と、交差車両の速度とに応じたものに設定することができる。このような長さを有する仮想壁を設定することにより、自車両と交差車両との衝突を確実に回避することができる。
まず、図1を参照して、実施形態に係る車両制御装置100の構成について説明する。図1は、実施形態に係る車両制御装置100の概略構成を示すブロック図である。
なお、レーダ22としてミリ波レーダの代わりにレーザレーダを用いてもよいし、また、レーダ22の代わりに超音波センサなどを用いてもよい。更に、複数のセンサ類を組み合わせて用いて、対象物の位置及び速度を測定してもよい。
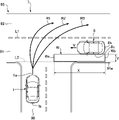
次に、コントローラ10による自車両の走行の支援について説明する。本実施形態では、コントローラ10は、自車両が交差車線(自車線を走行している自車両が交差点に進入するとき、当該交差点において自車線と交差している車線を意味する)に進入するときに、自車両と、交差車線を走行する交差車両との衝突を回避するように、複数の経路候補を設定する。図2及び図3は、日本の交通事情のように、交通法規により車両が左側車線を走行することが定められている環境を示している。
8 交差車両
10 コントローラ
21 カメラ(交差車両検出センサ)
22 レーダ(交差車両検出センサ)
31 通信装置(交差車両検出センサ)
90 自車線
91 第1交差車線(交差車線)
100 車両制御装置
R1~R3 経路候補
W 仮想壁
Claims (3)
- 車両の走行を支援する車両制御装置であって、
自車線を走行している自車両が交差点に進入するとき、該交差点において該自車線と交差している車線を交差車線と定義し、該交差車線を走行している車両を交差車両と定義すると、
前記交差車線を走行しながら前記自車両に接近する前記交差車両を検出するよう構成された交差車両検出センサと、
前記自車両から延びる複数の経路候補を設定し、該複数の経路候補に基づいて前記自車両の走行を支援するよう構成されたコントローラと、を有し、
前記コントローラは、前記交差車両の進行に伴って移動し、且つ前記交差車両の進行方向に延びる仮想壁を前記自車両と前記交差車両との間に設定して、該仮想壁を通過しないように前記複数の経路候補を設定するとともに、前記自車両から前記仮想壁の手前まで延びる前記経路候補を設定するよう構成されている、
ことを特徴とする車両制御装置。 - 前記コントローラは、前記自車両が、前記交差車両が走行している前記交差車線を通過し終えるのに要する時間、又は、前記交差車線に合流し終えるのに要する時間に応じた長さを有する前記仮想壁を設定するよう構成されている、請求項1に記載の車両制御装置。
- 前記コントローラは、前記自車両が、前記交差車両が走行している前記交差車線を通過し終えるのに要する時間、又は、前記交差車線に合流し終えるのに要する時間を、前記交差車両の速度に対して乗算することにより得られる距離に基づいて、前記仮想壁の長さを設定するよう構成されている、請求項2に記載の車両制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019082578A JP7197832B2 (ja) | 2019-04-24 | 2019-04-24 | 車両制御装置 |
| EP20162747.8A EP3730368A1 (en) | 2019-04-24 | 2020-03-12 | Vehicle control device, method and computer program product |
| US16/816,279 US20200339114A1 (en) | 2019-04-24 | 2020-03-12 | Vehicle control device, method and computer program product |
| CN202010198952.4A CN111845731A (zh) | 2019-04-24 | 2020-03-20 | 车辆控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019082578A JP7197832B2 (ja) | 2019-04-24 | 2019-04-24 | 車両制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020179731A JP2020179731A (ja) | 2020-11-05 |
| JP7197832B2 true JP7197832B2 (ja) | 2022-12-28 |
Family
ID=69810674
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019082578A Active JP7197832B2 (ja) | 2019-04-24 | 2019-04-24 | 車両制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20200339114A1 (ja) |
| EP (1) | EP3730368A1 (ja) |
| JP (1) | JP7197832B2 (ja) |
| CN (1) | CN111845731A (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018159429A1 (ja) * | 2017-03-02 | 2018-09-07 | パナソニックIpマネジメント株式会社 | 運転支援方法およびそれを利用した運転支援装置、運転支援システム |
| JP7036857B2 (ja) * | 2020-03-27 | 2022-03-15 | 本田技研工業株式会社 | 車両及びその制御装置 |
| DE102020209353A1 (de) * | 2020-07-24 | 2022-01-27 | Ford Global Technologies, Llc | Steuern eines Fahrzeugs unter Berücksichtigung der Sensorreichweite |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005141557A (ja) | 2003-11-07 | 2005-06-02 | Nissan Motor Co Ltd | 車両用表示装置 |
| JP2016009440A (ja) | 2014-06-26 | 2016-01-18 | 株式会社デンソー | 衝突緩和装置、および衝突緩和プログラム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006256493A (ja) * | 2005-03-17 | 2006-09-28 | Advics:Kk | 車両用走行支援装置 |
| JP4654796B2 (ja) * | 2005-06-29 | 2011-03-23 | トヨタ自動車株式会社 | 車両用運転支援装置 |
| JP5897787B2 (ja) * | 2010-03-30 | 2016-03-30 | トヨタ自動車株式会社 | 運転支援装置及び運転支援方法 |
| EP2765046B1 (en) | 2011-10-03 | 2020-02-12 | Toyota Jidosha Kabushiki Kaisha | Driving assistance system for vehicle |
| JP6350385B2 (ja) * | 2015-05-13 | 2018-07-04 | トヨタ自動車株式会社 | 運転支援装置 |
| JP6347262B2 (ja) * | 2016-02-12 | 2018-06-27 | マツダ株式会社 | 車両の制御装置 |
| JP6668895B2 (ja) * | 2016-04-01 | 2020-03-18 | 株式会社デンソー | 走行支援装置 |
| JP6380919B2 (ja) * | 2016-09-01 | 2018-08-29 | マツダ株式会社 | 車両制御装置 |
| WO2018132614A2 (en) * | 2017-01-12 | 2018-07-19 | Mobileye Vision Technologies Ltd. | Rules-based navigation |
| JP2018173728A (ja) * | 2017-03-31 | 2018-11-08 | パナソニックIpマネジメント株式会社 | 自動運転制御方法およびそれを利用した自動運転制御装置、プログラム |
-
2019
- 2019-04-24 JP JP2019082578A patent/JP7197832B2/ja active Active
-
2020
- 2020-03-12 EP EP20162747.8A patent/EP3730368A1/en not_active Withdrawn
- 2020-03-12 US US16/816,279 patent/US20200339114A1/en not_active Abandoned
- 2020-03-20 CN CN202010198952.4A patent/CN111845731A/zh active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005141557A (ja) | 2003-11-07 | 2005-06-02 | Nissan Motor Co Ltd | 車両用表示装置 |
| JP2016009440A (ja) | 2014-06-26 | 2016-01-18 | 株式会社デンソー | 衝突緩和装置、および衝突緩和プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020179731A (ja) | 2020-11-05 |
| CN111845731A (zh) | 2020-10-30 |
| US20200339114A1 (en) | 2020-10-29 |
| EP3730368A1 (en) | 2020-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3730361A1 (en) | Vehicle control device, method and computer program product | |
| JP6630267B2 (ja) | 車両制御装置 | |
| JP6809890B2 (ja) | 車両制御装置 | |
| CN111824088B (zh) | 车辆控制装置 | |
| CN111824089B (zh) | 车辆控制装置 | |
| JP6460579B2 (ja) | 運転支援制御装置 | |
| JP7197832B2 (ja) | 車両制御装置 | |
| CN111845670B (zh) | 车辆控制装置 | |
| JP6985176B2 (ja) | 車両制御装置 | |
| EP3725629A1 (en) | Vehicle control device | |
| JP7239877B2 (ja) | 車両制御装置 | |
| JP7231884B2 (ja) | 車両制御装置 | |
| JP7332996B2 (ja) | 車両制御装置 | |
| JP7262702B2 (ja) | 車両制御装置 | |
| JP7276690B2 (ja) | 車両制御装置 | |
| JP7226304B2 (ja) | 車両制御装置 | |
| JP7258284B2 (ja) | 車両制御装置 | |
| JP7337328B2 (ja) | 車両制御装置 | |
| JP2020163968A (ja) | 車両運転支援システム | |
| JP2020163974A (ja) | 車両運転支援システム | |
| JP7393722B2 (ja) | 車両運転支援システム | |
| JP2020179730A (ja) | 車両制御装置 | |
| JP2024039134A (ja) | 車両制御装置及び車両制御方法 | |
| JP2021105909A (ja) | 車両制御装置 | |
| JP2020163969A (ja) | 車両運転支援システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211021 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221102 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221116 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7197832 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |