以下、図面を参照して、本発明の実施の形態について詳細に説明する。
(第1の実施形態)
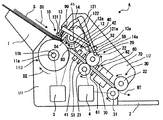
第1の実施形態を図1〜図20を参照して説明する。図1は本発明の一実施形態に係るシート搬送装置Aの概略図である。
<装置の構成>
シート搬送装置Aは、原稿の画像を読み取る画像読取装置(スキャナ等)や、原稿に対して印刷を行う印刷装置(プリンター等)、あるいはこれらを組み合わせた複合機などの原稿搬送系を持つ装置に適用可能であり、本実施形態では、画像読取装置へ適用した例として説明する。
本実施形態のシート搬送装置Aは、装置本体A1の背面側上端部に設けられた載置台1(積載部)に積載された一つ又は複数の原稿Sを1つずつ装置内に対し、水平面(装置本体A1の設置面)に対して傾斜した経路(搬送路)RTにて搬送してその画像を読み取り、装置本体Aの前面側下端部に設けられた排出トレイ2に排出する装置である。
装置本体A1は、設置面を有する第1筐体(下部ユニット)U1と、この第1筐体に対してヒンジなどを介して回動自在に連結された第2筐体(上部ユニット)U2とで構成される。そして、本実施形態において、原稿Sが搬送される経路RTは、第1筐体U1の鉛直方向上側の傾斜面と、第2筐体U2の鉛直方向下側の傾斜面との隙間で形成されている。
なお、装置本体A1の経路RTに沿って搬送される原稿Sとしては、例えば、OA紙、チェック、小切手、名刺、カード類等のシートであり、厚手のシートであっても、薄手のシートであってもよい。カード類は、例えば、保険証、免許証、クレジットカード等を挙げることができる。
<給送部>
図1に示すように、装置本体A1の経路RTに沿って原稿Sを給送する給送機構としての第1搬送部10が設けられている。第1搬送部10は本実施形態の場合、給送ローラ110と、給送ローラ110に対向配置される分離ローラ12と、を備え、載置台1上の積載面側に配置された原稿Sを給送方向D1に一つずつ順次搬送する。
なお、図1では搬送状態に対し、図2では待機状態を示している。図3では装置全体の駆動伝達構造を示し、図4では給送部の要部拡大図を示し、図5では給搬送部の要部拡大図を示している。本実施形態においては、給送方向D1は、シート搬送装置Aの載置面に対して所定の角度で傾斜して設けられており、載置台1に載置された原稿Sの自重によって給送機構に対して原稿Sが供給される。
第1筐体U1の上端部側には、載置台1の載置面側にある原稿Sに当接するように給送ローラ110を装着するための凹形状部であるローラ装着部a1が設けられている。なお、本実施形態では、このローラ装着部a1内に装着された給送ローラ110の周囲を覆うカバー部材a3が、ローラ装着部a1の端部に開閉自在に設けられる。そして、このカバー部材a3を開状態とした状態では、給送ローラ110はローラ装着部a1に対して着脱自在となる。
また、給送ローラ110は、図4に示すように、例えば、ゴム材料等で形成された2つの給送ローラ部(第1ローラ部及び第2ローラ部)11がホイール部111にそれぞれ個別に装着され、このホイール部111がワンウェイクラッチ11aを介して個別に給送ローラ軸(回転軸)11bに支持されている。つまり、本実施形態のワンウェイクラッチ11aは、左右に別々に設けられた複数の給送ローラ部11に対してそれぞれ設けられ個々独立した第1ワンウェイクラッチ部及び第2ワンウェイクラッチ部となる。
さらに、給送ローラ110が有する給送ローラ軸11bは、図4に示すように、ローラ装着部a1内に設けられた軸受部a2に両側の軸端部が保持され、更にその上からカバー部材a3を閉じることで、カバー部材a3とローラ装着部a1の軸受部a2との間で給送ローラ軸11bの軸受構造が形成され、ローラ装着部a1内の軸受部a2とカバー部材a3との間で給送ローラ軸11bの両端部が回転可能に保持される。すなわち、カバー部材a3の開閉によって、給送ローラ110の着脱が容易に行えるようになっている。
また、給送ローラ110が有する給送ローラ軸11bには、各給送ローラ部11の軸方向における隙間に給送ギア部112が設けられている。この給送ギア部112は、装置本体A1内に設置されたモータ3(駆動モータ)の駆動力を伝達する駆動ギア部101に対してギア接続される。なお、この給送ギア部112は、上記カバー部材a3を閉じたときにカバー部材a3によって分離ローラ12側の上部が覆われる構造となる。これにより、給送ギア部112に対して紙粉が付着することをカバー部材a3によって保護することができる。
このようにカバー部材a3によって保護された給送ギア部112は、各給送ローラ部11の直径よりも小さいギア径で設けられている。このため、駆動ギア部101は、給送ローラ軸11bの軸方向視において各給送ローラ部11と部分的に重なり、給送ギア部112とのギア接続部が軸方向視において各給送ローラ部11と重なるように設けられている。これにより、給送ギア部112の外径を小さく設定し、給送ローラ110の収容性を高め、カバー部材a3との物理的な干渉についても防ぐことができる。
また、このような給送ギア部112に接続される駆動ギア部101は、駆動ギア軸102の一端側に設けられ、駆動ギア軸102の他端側には、電磁クラッチ等から構成されるクラッチ部103が設けられている。また、このクラッチ部103は、モータ3からプーリーで駆動力が伝達される駆動伝達機構(ギア列)Xと駆動ギア軸102との間で接続されている。つまり、駆動ギア軸102と駆動伝達機構Xとは、駆動ギア軸102が有するクラッチ部103によって駆動連結される。さらに、この給送ローラ110への駆動伝達機構Xは、分離ローラ12の駆動伝達機構が接続される。すなわち、モータ3は、分離ローラ12及び給送ローラ110の駆動源となる。
ここで、駆動ギア軸102に設けたクラッチ部103がOFFのときは、モータ3の逆転駆動(原稿を載置台1側へ戻すための駆動)を駆動ギア軸102に伝達せず、クラッチ部103がONのときはモータ3の正転駆動(原稿を分離給送する方向の駆動)のみを駆動ギア軸102に伝達するための切替手段である。
クラッチ部103をOFFすると、分離ローラ12だけに駆動伝達が行われ、このとき給送ローラ110は分離ローラ12に従動回転する。これにより、原稿が重送したことを後述する重送検出センサ40で検知した場合、給送動作を一時停止し、モータ3を駆動することで、重送した原稿を載置台1側に戻す動作を適切に行うことができる。なお、このような重送リトライ機能を搭載しない場合は、クラッチ部103を設けなくてもよい。
このように、本実施形態では、モータ3を駆動して駆動ギア部101から給送ギア部112にその駆動力が伝達されると、給送ギア部112と共に給送ローラ軸11bが給送方向(図1の実線矢印D2方向)に回転する。このとき、ワンウェイクラッチ11aが給送ローラ軸11bに噛み合うことで、給送ローラ部11がホイール部111と共に給送方向に回転する。
ここで、給送ローラ110の搬送速度は、後述の搬送ローラ21の搬送速度より遅い速度に設定されている。このため、給送された原稿Sが搬送ローラ21に到達し原稿Sの搬送速度が上がる時、ワンウェイクラッチ11aと給送ローラ軸11bとの噛み合いが外れ、給送ローラ110は搬送原稿Sに連れ回り、モータ3からの駆動伝達で回転するスピードよりも速く回転する。
すなわち、搬送ローラ21に達した搬送原稿Sは、給送ローラ110との速度差が大きく設定された搬送ローラ21から搬送力を受けるため、給送ローラ110とこの給送ローラ110に接圧された分離ローラ12との間から引き抜かれることになる。
このとき、本実施形態では、上述したように、ワンウェイクラッチ11aが左右の給送ローラ部11に対して個別に設けられているため、搬送ローラ21に達した搬送原稿Sが斜行した状態で給送ローラ110及び分離ローラ12の間から引き抜かれたとしても、個々独立したワンウェイクラッチ11aの動作によって、後続原稿Sの斜行の連鎖が抑えられる(以下、「斜行連鎖の抑制効果」)。
ここで、本実施形態の給送ローラ110は、上述したように、給送ローラ軸11bの軸方向における各給送ローラ部11の隙間に給送ギア部112が配置されているので、給送ローラ110に対してモータ3の駆動力が安定的に伝達される。
すなわち、給送ローラ110は、分離ローラ12からの付勢力を受けており、この付勢力に対し、給送ローラ軸11bへの駆動伝達は各給送ローラ部11の間で行われることになるので、左右の給送ローラ部11において実質的に均等な位置でバランス良く駆動伝達が行われる。
また、本実施形態の給送ローラ110に対しては、各給送ローラ部11のうち給送ギア部112側の各ローラ端部に対して分離ローラ12がそれぞれ接圧される構成としている。
つまり、分離ローラ12は、給送ローラ110の各給送ローラ部11に対してバネ等で均等に付勢されるが、本実施形態の構成では、各給送ローラ部11のうち給送ギア部112側の各ローラ端部に圧接するような構成とすることで、給送ギア部112と駆動ギア部101とのギア接続が更に安定化する。これにより、給送ローラ110に対する動力伝達がより安定的に行え、分離ローラ12との接圧状態も左右で良好なバランスを維持できる。
なお、本実施形態では、上述したように、各給送ローラ部11のうち給送ギア部112側(互いに向かい合う側)の各ローラ端部で分離ローラ12がそれぞれ接圧される構成としたが、給送ギア部112側とは反対側のローラ端部でそれぞれ分離ローラ12と接圧されていてもよいし、軸方向における各給送ローラ部11の中央部で分離ローラ12と接圧されてもよい。いずれにしても、各給送ローラ部11に対して分離ローラ12を左右均等に接圧するようにするのが好ましい。
このように、本実施形態の給送ローラ部11は、分離ローラ12の付勢力を受け、左右でバランス良く分離ローラ12に接圧されることになる。つまり、分離ローラ12に対する給送ローラ110の姿勢が安定する。したがって、原稿Sに対して左右のニップ力が均等にかかることになるため、原稿Sの斜行を未然に防止し、様々な種類の原稿に対して、安定した給送動作を行うことができる。また、先行する原稿Sが斜行したとしても、後続の原稿Sに対して上述のワンウェイクラッチ11aの個別動作を安定的に実行できるため、斜行連鎖の抑制効果を更に高めることができる。
また、本実施形態では、給送ギア部112は、給送ローラ軸11bを保持する部分が筒状に設けられ、この筒状部112aが給送ローラ軸11bの軸方向両側に突出して延設されている。これにより、各給送ローラ部11を保持するホイール部111またはワンウェイクラッチ11aと各筒状部112aの端部(第1及び第2当接部)が当接することで、各給送ローラ部11の間隔を一定に保つことができる。但し、給送ギア部112の筒状部112aとホイール部111またはワンウェイクラッチ11aとは常時当接していなくても良く、ホイール部111が給送ローラ軸11bに対して軸方向に僅かに移動可能に保持されており、ホイール部111がワンウェイクラッチ11aとともに給送ギア部112側に移動した際に当接可能なように構成されていれば良い。いずれにしても、給送ギア部112の筒状部112aによって、各給送ローラ部11の間隔を一定に保つことができる。
すなわち、本実施形態の給送ギア部112は、各給送ローラ部11の間隔を規制する役目を果たす。なお、ここでは、ホイール部111と給送ギア部112の各筒状部112aの端部とが当接するように説明したが、ワンウェイクラッチ11aの側面部に当接させても同様の効果が得られる。
また、本実施形態のように給送ギア部112の各筒状部112aによってワンウェイクラッチ11aを実質的に覆うようにすることで、紙粉などがワンウェイクラッチ11aの隙間に入り込むことを未然に防ぐ効果も期待できる。
なお、給送ローラ110と後述の分離ローラ12はそれぞれ1つのユニットであり、装置から付け外し可能なユニットとなっている。このため、メンテナンスが容易であり、また、ローラ表面が摩耗してきた場合等において、給送ローラ110のユニット交換が可能である。
<分離部>
上述した給送ローラ110に対向配置される分離ローラ12は、原稿Sを1枚ずつ分離するためのローラであり、給送ローラ110に対して一定圧で圧接している。この圧接状態を確保するため、図1に示すように分離ローラ12を分離揺動部材121によって支持している。分離揺動部材121は、軸部121aを中心に回転可能に支持されており、また、分離ローラ12が給送ローラ110に圧接するように圧縮バネ122により付勢力が与えられている。
図1に示すように、分離ローラ12はトルクリミッタ12aを介してモータ3から駆動力が伝達され、実線矢印D3方向に回転駆動される。分離ローラ12はトルクリミッタ12aにより駆動力の伝達が規制されるため、給送ローラ110と当接している際は給送ローラ110に連れ回りする方向(破線矢印D4方向)に回転する。これにより、図5に示すように、複数の原稿Sが給送ローラ110と分離ローラ12とのニップ部(圧接部)Nに搬送されてきた際には、一つを残して2つ以上の原稿Sが下流に搬送されないようにせき止められる。
このような給送ローラ110と分離ローラ12とが接圧され、原稿に対して分離作用を及ぼす部分、すなわち、原稿を捌く部分が少なくとも分離給送部として機能するが、本発明でいう分離給送部とは、例えば、本実施形態のように2つの給送ローラ部11によって給送ローラ110を構成している場合、上記ニップ部Nに対して各給送ローラ部11の間に挟まれた部分も含めて分離給送部としての意味を有する。
なお、本実施形態においては分離ローラ12を用いた構造にて説明したが、必ずしもローラの形態に限らず、原稿Sに対して給送方向とは逆方向に負荷を掛けるもの、例えば分離パッドなどを用いた場合でも同様であり、分離部材としてはいかなる形態でも構わない。
<給送部の原稿検知構造>
載置台1上の原稿Sの有無を検知するため、図1に示すように給送ローラ110の上流部には原稿検知センサ90が設けられている。原稿検知センサ90は、自重で鉛直方向上方から下方側に垂れ下るように設けられたレバー式のセンサである。他の例として後述の媒体検出センサ50、60のような光学式のセンサであっても構わない。
ここで、本実施形態では、原稿検知センサ90は、分離ローラ12と給送ローラ部11とで形成されるニップ部よりも給送方向における直前で原稿の有無を検知するセンサである。そのため、原稿検知センサ90は、ニップ部に近い場所となる左右の給送ローラ部11の間に配置するのが好ましく、その場合、原稿検知センサ90は、カバー部材a3を間に挟んで給送ローラ110の給送ギア部112と対向する部分に設けることになる。
例えば、駆動力の伝達を行う上で給送ギア部112の外径等を設定するにあたり、原稿検知センサ90(およびカバー部材a3)との物理的な干渉を防ぐことが好ましいが、原稿検知の精度等を高めるために原稿検知位置をニップ部に近づけたい場合もある。
したがって、それらの両立を図るためには、原稿検知センサ90の先端部が、給送ローラ部11の軸方向において各給送ローラ部11及び給送ギア部112に重なるように、給送ローラ部11と給送ギア部112との間にそれぞれ牙状に延設することが好ましい。
この場合においても、原稿検知センサ90と給送ギア部112との間には、カバー部材a3を介在させることが好ましい。その場合、カバー部材a3は、給送ギア部112との干渉を防ぐために中央部が分離ローラ12側に突出し、また、原稿検知センサ90との干渉を防ぐために、中央部の両脇が給送ローラ軸11b側に突出した形状となっていることが好ましい。
これにより、カバー部材a3が給送ギア部112を含む給送ローラ110の周囲を覆うことで紙粉などが駆動系に付着することを防ぎつつ、このような給送ローラ110の駆動部分と、カバー部材a3の面上において原稿の有無を原稿検知センサ90により検知する原稿検知部分とを構造的に仕切ることができる。
このような原稿検知センサ90における牙状の先端部は、原稿検知センサ90の剛性を確保するために相互に連結することが好ましく、その場合、当該連結部は、給送ギア部112に対して給送方向下流側を迂回するような形状で形成するのがよい。これにより、原稿検知センサ90の剛性を確保しつつ、原稿検知位置をニップ部に近づけ、更に給送ギア部112の設計自由度を高めることができる。
なお、本実施形態のようなレバー式の原稿検知センサ90を採用することで、給送ローラ110において給送ギア部112を設けるスペースが確保され、高精度な原稿検知に加え、左右均等な接圧状態で良好な分離給送を行うことができる。
<ピックアーム・原稿ストッパー>
シート搬送装置Aは図1のように、給送ローラ110と分離ローラ12とが接するニップ(以下、給送ニップ)の上流側で給送ローラ110に原稿Sを圧接するピックローラ131と、ピックローラ131を軸支するピックアーム13を備える。ピックローラ131は原稿Sを給送ローラ110に押し付けることで原稿Sの搬送力をアップさせて原稿Sの給送を補助する。
ピックアーム13は、ピックアーム13の軸部13aが装置Aに回転可能に支持され、ピックローラ131を給送ローラ110に押し付ける方向に不図示のバネにより付勢されている。ピックアーム13は、図1で示されるピックローラ131が給送ローラ110に原稿Sを圧接する圧接位置と、図2で示されるピックローラ131を給送ローラ110から退避する退避位置と、に後述のモータ4の駆動力によって移動可能である。
給送ローラ110の給送を補助する別の構成として、給送ローラ110の上流にもう1つの給送ローラを設ける構成もあるが、上記図1の構成であれば装置の小型化や装置のコストダウンを実現できる。
シート搬送装置Aは図1のように原稿ストッパー14を備える。原稿ストッパー14は図2の状態においてその先端を搬送路側に突出させることで、積載された原稿束をせき止める役割を有する。
原稿ストッパー14は、原稿ストッパー14の軸部14aが装置Aに回転可能に支持され、図1で示される原稿Sを給送できるように搬送路を開く開口位置と、図2で示される給送ニップに原稿束が入らないように搬送路を閉じる閉口位置と、に移動可能である。図2がシート搬送装置Aの待機状態であり、この状態で原稿束の先端を原稿ストッパー14に突き当てて載置台1に原稿束をセットできる。
モータ4は、搬送ローラ21を保持する搬送ローラ軸21a、及び搬送ローラ31を保持する搬送ローラ軸31aの一端側においてプーリーP及びベルト4aを介して接続される。
すなわち、モータ4は、搬送ローラ21、31を駆動する駆動源であり、上述した給送ローラを駆動するモータ3とは別のモータとして設けられている。これにより、モータ3、4を個別制御すれば、給送駆動と搬送駆動とを別々の制御を行うことで、高精度な給搬送制御を実現できる。
ピックアーム13と原稿ストッパー14は駆動伝達機構Y(図3参照)を介して、上述した搬送ローラ21、31を駆動するモータ4によって駆動される。モータ4が所定パルス数を正方向に駆動することで、ピックアーム13が圧接位置、原稿ストッパー14が開口位置に移動し、モータ4が所定パルス数を逆方向に駆動することで、ピックアーム13が退避位置、原稿ストッパー14が閉口位置に移動する。ここで正方向とは、図1において原稿Sを給送方向D1に搬送するように後述の搬送ローラ21、31を回転させる方向である。
<搬送構造>
図1に示すように、第1搬送部10の給送方向下流側にある搬送機構としての第2搬送部20は、搬送ローラ21と、搬送ローラ21に従動する従動ローラ22とを備え、第1搬送部10から搬送されてきた原稿Sをその下流側へ搬送する。搬送ローラ21はモータ4から駆動力が伝達され、図中実線矢印方向に回転駆動される。従動ローラ22は搬送ローラ21に対して一定圧で圧接し、搬送ローラ21に連れ回る。
このような第2搬送部20よりも給送方向下流側にある第3搬送部30は、搬送ローラ31と、搬送ローラ31に従動する従動ローラ32とを備え、第2搬送部20から搬送されてきた原稿Sを排出トレイ2へ搬送する。つまり、この第3搬送部30は排出機構として機能する。搬送ローラ31はモータ4から駆動力が伝達され、図中実線矢印方向に回転駆動される。従動ローラ32は搬送ローラ31に対して一定圧で圧接し、搬送ローラ31に連れまわる。
<重送検出>
図1及び図2に示すように、第1搬送部10と第2搬送部20との間に配置される重送検出センサ40は、静電気等により紙などの原稿S同士が密着し、第1搬送部10を通過してきた場合(つまり重なって搬送される重送状態の場合)に、これを検出するためのシート検出センサ(原稿Sの挙動や状態を検出するセンサ)の一例である。
重送検出センサ40は、種々のものが利用可能であるが、例えば、本実施形態の場合には超音波センサであり、経路RTを挟むように配置された超音波の発信部41とその受信部42とで構成され、紙等の原稿Sが重送されている場合と1つずつ搬送されている場合とで、原稿Sを通過する超音波の減衰量が異なることを原理として重送を検出するセンサである。
ここで、超音波の発信部41は、装置本体A1のうち第1筐体U1側に設けられ、超音波の受信部42は、超音波の発信部41と対向するように第2筐体U2側に設けられている。具体的には、超音波の発信部41と受信部42とはそれぞれ別の基板101、102に実装され、基板101が第1筐体U1に組み込まれ、基板102が第2筐体U1に組み込まれる。なお、受信部42を実装した基板102側において、超音波の駆動ならびに検知制御をする機能を持たせると、超音波の受信部42で受信した微小なアナログ信号を増幅して最短で検知制御をするデバイス(例えば、A/Dを備えたマイコンなど)に入力でき、重送検知の精度向上につながる。
このような重送検知センサ40は、超音波の発信部41と受信部42との間で挟まれた部分で経路RTにおいて重送検知領域40aを形成している(図5参照)。なお、この重送検知領域40aでは、音波振動が生じるため、そこに紙粉が混入しても、紙粉が音波振動によって他の部分へ飛散して残留を防ぐことも考えられるが、紙粉が影響して超音波の減衰量が変動し、重送検知の精度が悪くなるおそれもある。
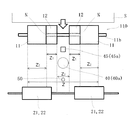
本実施形態では、図5に示すように、原稿の分離給送部(具体的には給送ローラ110と分離ローラ12とで構成される部分)よりも原稿の給送方向下流側に延びる下流領域Zのうち、給送ローラ110と分離ローラ12との間のニップ部よりも原稿の給送方向下流側に延びる下流領域(紙粉領域Z1)を除く下流領域Z2を対象にして、重送検知領域40a(検出領域)を設けることが好ましい。
例えば、本実施形態では、超音波の発信部41と受信部42を給送ローラ110の各給送ローラ部11の隙間から原稿の給送方向下流側に延びる上記下流領域Z2に対向して配置し、重送検知領域40aを設定している。これにより、重送検知領域40aは、紙粉領域Z1から外れた位置に設定されるため、紙粉の影響を低減することができ、重送検知の精度を向上することができる。
なお、本実施形態では紙粉領域Z1を外すように重送検知センサ40を配置した例で説明したが、例えば、発信部41を第1筐体U1側に配置しているので、紙粉領域Z1に重送検知センサ40を配置することも可能である。仮に発信部41を第2筐体U2側に設ける場合でも、音波振動により紙粉の影響を低減できることから、受信部42を紙粉領域Z1内に設けることも可能である。
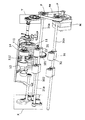
ここで、重送検知センサ40の配置について、さらに詳細に説明する。例えば、本実施形態では、図22に示すように、超音波の発信部41を実装した基板101は、第1筐体U1に対する実装面が搬送路RTと平行となる向きで装置設置面に対して傾けて第1筐体U1に組み込まれる。受信部42を実装した基板102は、発信部41を実装した基板101と同様に、第2筐体U2に対する実装面が搬送路RTと平行となる向き(又は基板101と平行となる向き)で第2筐体U2に組み込まれる。
また、これら超音波発信部41および受信部42をそれぞれ別々に実装した基板101、102は、第1筐体U1において外部通信や電源供給が行われるメイン基板Bに接続され、メイン基板Bとの間ではケーブルCを通じて通信(制御命令等)、及び通電(電源供給)が可能となっている。
なお、メイン基板Bと、第2筐体内の受信部42の基板102との間は、ケーブルCを通じて接続されるが、当該ケーブルCは、第1筐体U1と第2筐体U2を回動自在に連結しているヒンジ部Hを経由するように配線することが好ましい。勿論、第1筐体U1と第2筐体U2との開閉に応じて電気的な接点が確立するような接続部を第1筐体U1及び第2筐体U2のそれぞれに設け、このような接続部を通じて基板102に通電するようにしてもよい。
<移動検知部>
移動検知センサ45は、例えば、図示しないが、搬送路に向けて光照射する光源と、当該光源から照射され原稿から反射する光を受光して撮像(撮影)する撮像部とを有する。本実施形態の移動検知センサ45は、光源から原稿に対して光照射し、原稿からの反射光を撮像部で受光して得られる画像を取得し、当該画像に含まれる特徴点の移動に基づいて、原稿の移動量又は移動方向を検知するセンサであり、シート検知センサ(シート検知部)の一例である。
すなわち、本実施形態の移動検知センサ45は、1つの検知領域内で撮影した原稿のシート画像における特徴点の移動や変化を追跡(トラッキング)するトラッキングセンサであり、主に、搬送路内における原稿の斜め移動(斜行)を検知するセンサとして用いている。
なお、図5に示すように、このような移動検知センサ45の移動検知領域45aは、例えば、重送検知センサ40の重送検知領域40aよりも相対的に小さく、例えば、1mm角の領域よりも小さく設定されるため、重送検知センサ40よりも紙粉の影響を受け易い。本実施形態においては、この移動検知センサ45と重送検知センサ40とでシート検知部を構成しているが、これら以外のセンサを同様の位置に追加で配置しても構わない。
本実施形態では第2筐体U2側に移動検知センサ45を設けているので、移動検知センサ45に紙粉が付着し難い構造である。そのため、移動検知センサ45は給送部(ニップ部)側に近づけて配置することが可能となる。ニップ部を通過した原稿先端は、その姿勢が比較的安定しているため、移動検知センサ45をニップ部に近づけて配置することで、トラッキング精度を高めることができる。
また、本実施形態における移動検知センサ45は、図22に示すように、第2筐体U2側に配置された超音波の受信部42を実装した基板102に配置される。また、第1筐体U1側に配置したメイン基板BからケーブルCを用いて基板102に設けたコネクタに接続して通電が行われ、電源供給や制御命令の送受信を行うことができるようになっている。
したがって、メイン基板Bから移動検知センサ45(光源と撮像部)に対する電源供給は、少なくとも、受信部42の基板102を通じて行えるようになっている。これにより、メイン基板Bから移動検知センサ45に対する独立した電源供給のためのケーブル配策が省略でき、配線構造を簡略化できる。本実施形態においてはヒンジ部を通じてケーブルCの配策を行うため、当該ヒンジ部の配線スペースを小さくできるメリットもある。
また、本実施形態のように、移動検知センサ45を超音波の受信部42と同じ基板101に配置したことで、より少ない基板の枚数でセンサ実装が行えるため、装置全体の構造を簡略化でき、部品点数が減らせるため低コスト化を図ることができる。さらに、超音波センサの制御と移動検知センサの制御を同一のデバイスで実行することで、制御系も統一でき、装置のコストダウンにつながる。本実施形態においては、このように基板101と基板102とによって、シート検知部を制御する制御基板を構成しているが、必ずしもこの構成には限定されない。
上記では、移動検知センサ45を第2筐体U2側に配置する構成を説明したが、本発明はこれに限定されず、第1筐体U1側に配置している超音波の発信部41の基板に直接実装、又は接続して設けるようにしてもよい。このように移動検知センサ45を第1筐体U1側に配置して経路RTを移動する原稿のトラッキングを行う場合においては、原稿給送時の分離に伴って発生した紙粉が原稿搬送に伴って経路RTに沿って移動する領域があるため、そのような紙粉領域Z1をなるべく避けて配置することが好ましい。
したがって、上述した移動検知センサ45を、搬送路RTのうち給送ローラ110が設けられた側の一壁面において、原稿の分離給送部よりも原稿の給送方向下流側に延びる下流領域Zのうち紙粉領域Z1を除く下流領域Z2に対応して設けることが好ましい。これにより、移動検知領域(検出領域)は、紙粉領域Z1から外れた位置に設定されるため、紙粉の影響を低減することができ、移動検知の精度を向上することができる。
さらに、この場合、図5に示すように、重送検知センサ40との関係において、移動検知センサ45を重送検知センサ40の搬送路RTの上流側に設けている。更には、両センサ間の距離が離れている為に、搬送路内に個別に貫通穴を設け、この穴から各々のセンサの検知対象を検知可能な構成にしている。これは、重送検知センサ40の重送検知領域40aにおいて仮に紙粉が混入し、超音波振動によって紙粉がその外側へ飛散したとしても、移動検知センサ45を重送検知センサ40よりも上流側に配置しておくことで、移動検知センサ45への影響を未然に防ぐことができる。
<レジストセンサ>
上述した重送検出センサ40よりも給送方向下流側に配置される媒体検出センサ50は第2搬送部20よりも上流側で、第1搬送部10よりも下流側に配置された上流側の検出センサ(原稿Sの挙動や状態を検出するセンサ)としての一例であり、第1搬送部10により搬送される原稿Sの位置、詳細には、媒体検出センサ50の検出位置に原稿Sの端部が到達又は通過したか否かを検出する。なお、本実施形態では、この媒体検出センサ50は、図1及び図2、図5に示すように、上述した重送検知センサ40と移動検知センサ45に対して、更に第2搬送部20側で同じ下流領域Z2に設けている。
媒体検出センサ50としては、種々のものが利用可能であるが、本実施形態の場合には光学センサであり、発光部51とその受光部52とを備え、原稿Sの到達又は通過により受光強度(受光量)が変化することを原理として原稿Sを検出する。このような媒体検知センサ50は、例えば、超音波の発信部41を実装した基板101に実装してもよいし、別の基板に実装してよい。前者の場合には、上記移動検知センサ45と共に、基板枚数の削減や接続配線の簡略化を実現できる。
本実施形態の場合、原稿Sの先端が媒体検出センサ50で検出された時点で、原稿Sが重送検出センサ40により重送を検出可能な位置に到達しているように、上記の媒体検出センサ50は重送検出センサ40の近傍においてその下流側に設けられている。なお、この媒体検出センサ50は、上記の光学センサに限定されず、例えば、原稿Sの端部が検知できるセンサ(イメージセンサ等)を用いてもよいし、経路RTに突出したレバー型のセンサでもよい。
媒体検出センサ50とは別の媒体検出センサ60が画像読取ユニット70よりも上流側に配置されている。第2搬送部20よりも下流側に配置された下流側の検出センサとしての一例であり、第2搬送部20により搬送される原稿Sの位置を検出する。
媒体検出センサ60としては、種々のものが利用可能であるが、本実施形態の場合、媒体検出センサ50と同様に光センサであり、発光部61と受光部62とを備え、原稿Sの到達又は通過により受光強度(受光量)が変化することを原理として原稿Sを検出する。
<CISの配置>
媒体検出センサ60よりも下流側にある画像読取ユニット70は、例えば、光学的に走査し、電気信号に変換して画像データとして読み取るものであり、内部にLED等の光源、イメージセンサ、レンズアレー等を備えている。本実施形態の場合、画像読取ユニット70は経路RTの両側に一つずつ配置されており、原稿Sの表裏面を読み取るコンタクトイメージセンサ(CIS)によって構成されている。
<ブロック図の説明>
図6を参照して制御部80について説明する。図6はシート搬送装置Aの制御部80のブロック図である。
制御部80はCPU81、記憶部82、操作部83、通信部84及びインターフェース部85を備える。CPU81は記憶部82に記憶されたプログラムを実行することにより、シート搬送装置A全体の制御を行う。記憶部82は例えばRAM、ROM等から構成される。操作部83は、例えば、スイッチやタッチパネル等で構成され、操作者からの操作を受け付ける。
通信部84は、外部装置との情報通信を行うインターフェースである。外部装置としてPC(パソコン)を想定した場合、通信部84としては、例えば、USBインターフェースやSCSIインターフェースを挙げることができる。また、このような有線通信のインターフェースの他、通信部84は無線通信のインターフェースとしてもよく、有線通信、無線通信の双方のインターフェースを備えていてもよい。
インターフェース部85はアクチュエータ86やセンサ87とのデータの入出力を行うI/Oインターフェースである。アクチュエータ86には、モータ3、モータ4等が含まれる。センサ87には、重送検出センサ40、移動検知センサ45、媒体検出センサ50及び60、画像読取ユニット70、原稿検知センサ90等が含まれる。
<PCからの開始指示受信による駆動>
シート搬送装置Aの基本的な動作について説明する。制御部80は、例えばシート搬送装置Aが接続された外部パソコンから画像読み取りの開始指示を受信すると、第1乃至第3搬送部10乃至30の駆動を開始する。載置台1に積載された原稿Sはその最も下に位置する原稿Sから1つずつ搬送される。画像読み取りの開始指示は、シート搬送装置Aに設けられたスタートボタンの押下によって実行されても良い。
<レジストセンサの出力に応じた読取開始>
制御部80は、媒体検出センサ60の検出結果に基づくタイミングで、第2搬送部20により搬送されてきた原稿Sの、画像読取ユニット70、70による画像の読み取りを開始し、読み取った画像を一次記憶して順次外部パソコンへ送信する。画像が読み取られた原稿Sは第3搬送部30により排出トレイ2に排出されてその原稿Sの画像読取処理が終了する。
<給送・搬送の動作フロー>
次に、図7を参照して給送・搬送の動作フローについて説明する。
ステップS01では、制御部80が、例えばシート搬送装置Aが接続された外部パソコンから画像読み取りの開始指示を受信する。
ステップS02では、制御部80が、原稿検知センサ90により載置台1上の原稿Sの有無を判定する。
ステップS03では、制御部80が、原稿検知センサ90により原稿Sが無いと判定した場合、原稿Sが無い旨の注意書きを外部パソコン等に表示し、給送・搬送が行われず終了となる。
ステップS04では、制御部80が、原稿検知センサ90により載置台1上に原稿Sが有ると判定した場合、モータ4を正方向に駆動する。この時ピックアーム13が圧接位置に、原稿ストッパー14が開口位置に移動される。
ステップS05では、制御部80が、モータ3を駆動し、給送ローラ110を原稿Sを給送する方向(正方向)に回転させ、原稿Sを給送する。
ステップS06では、搬送原稿Sの先端が媒体検出センサ50を通過したことを検出し、次いで、ステップS07で、搬送原稿Sの先端が媒体検出センサ60を通過したことを検出する。
このとき、搬送原稿Sの先端が媒体検出センサ60を通過したことで、搬送原稿Sが第2搬送部20に到達していることから、第1搬送部10を停止しても搬送原稿Sが第2搬送部20によって搬送されるため、ステップS08で、制御部80がモータ3を停止する。
一方、媒体検出センサ60に原稿Sの先端が到達した時刻から、画像読取ユニット70に到達する所定時間の経過後に原稿Sの画像読み取りを開始する。
ステップS09では、搬送原稿Sの後端が媒体検出センサ60を通過したことを検出する。この時刻から所定時間の経過後に原稿Sの画像読み取りを終了する。これによって1枚の原稿Sに対する一連の読み取り動作が完了する。
ステップS10では、制御部80が、原稿検知センサ90により載置台1上の原稿Sの有無を判定する。原稿Sが有ると判定した場合はステップS5に移り、原稿Sの搬送と画像読み取りを行う。
ステップS10で、原稿検知センサ90により載置台1上に原稿Sが無いと判定した場合、ステップS11で、制御部80がモータ4を停止する。このとき、媒体検出センサ60を通過した原稿が第3搬送部30によって排紙されるべく、所定時間経過後にモータ4を停止する。第3搬送部の駆動をモータ4が行わない場合には、直ちにモータ4を停止して良い。
その後、ステップS12で、制御部80が、モータ4を逆方向に所定パルス数だけ駆動してから停止する。この時、ピックアーム13が退避位置に、原稿ストッパー14が閉口位置に移動されて停止する。これで給送・搬送の動作が終了となる。
以上の動作フローにより、媒体検出センサ60をトリガーとして次の原稿Sの給送をする搬送制御を行う。これにより、画像読取ユニット70の読取位置で所定の紙間を設けられるので、安定的に原稿Sを連続して搬送することができる。
<分離揺動部材>
分離揺動部材121は図9に示すように、分離ローラ12の側部に設けられており、原稿Sに当接する面を設けたリブ部121bと、リブ部121bに揺動可能に支持された制限部材1211と、制限部材1211を付勢するバネ1212とを有する。制限部材1211は可動部材の一例であり、後述するように分離ローラ12と原稿の先端側との間の空間に進入する。
リブ部121bは、分離揺動部材121の側面図である図9に示すように、分離ローラ12の回転中心に対して給送方向上流側の外形面と略同一面である面121cを有する。積載枚数が多い原稿束等の重い原稿束を給送するときに、原稿束の先端が面121cに突き当たることで、積載された原稿束における上側の原稿Sが分離ローラ12に押圧され、分離ローラ12の上流側の面が潰れるのを防止し、また、給送ニップへ入り込む原稿束の枚数を制限し、給送不良を低減する。
制限部材1211は、リブ部121bの搬送路側への突出先端である突出部121dより搬送路に向けて突出すると共に、リブ部121bから給送方向上流側にも突出するように設けている。制限部材1211は、軸部1211aを中心に回転可能で、バネ1212により搬送路に突出する方向(図中矢印D5方向)に付勢され、回転止め部1211bがリブ部121bに突き当たっている。
制限部材1211は、重い原稿束をセットした時に退避(矢印D5とは逆方向に回動)するように、また、軽い原稿束をセットした時に退避しないように、バネ1212により付勢されている。軽い原稿束とは、伝票の束のような特に紙厚の薄いかつ原稿サイズが小さい原稿である。
例えば、本実施形態においては、最大積載枚数が60枚であるシート搬送装置Aにおいて、搬送路はシート搬送装置Aの設置面に対して40度となっており、この場合、坪量80g/m2でA4サイズのOA紙60枚をセットした場合に制限部材1211が原稿束に押されて退避し、坪量40g/m2でA6サイズの伝票60枚をセットした場合に制限部材1211が原稿束に押されても退避せずにいるよう、バネ1212の荷重が設定されている。
このように、制限部材1211を付勢するバネ1212の付勢力は、シート搬送装置Aの仕様やどの程度の原稿束に対してのみ退避するようにするかを設定することができ、必ずしも一意に決まるものではない。
このような制限部材1211を設けることによって、特に薄紙の給送ジャム(紙詰まり)を防止することができる。制限部材1211が無い場合は、図10のように、伝票等の紙厚の薄い原稿束を給送する時、原稿束の一部が給送ニップに入り込み、給送ニップと原稿束先端の間に空間Kができることがある。
このとき原稿S1を給送中にその空間Kの中で次に給送される原稿S2がつられて給送方向(正方向)に力を受け、分離ローラ12からも負方向の力を受けることで原稿S2先端がたわみ、原稿S2先端のめくれやジャムが発生することがある。
それに対し本実施形態においては、上記の制限部材1211を設けることで、図11のように、伝票等の紙厚の薄い原稿束に対しては給送ニップに入り込む原稿束の量を制限し、給送ニップと原稿束先端の間の空間Kを小さくしてその空間Kでの原稿S2のたわみを抑制し原稿S2先端のめくれやジャムの発生を抑えることができる。
重い原稿束に対しては、制限部材1211が退避するので、原稿Sと給送ローラ110の接触する面積が変わらず搬送力が低下しないので原稿Sの不送りが発生しない。またクレジットカード等の厚い原稿Sも給送ローラ110の搬送力を受けて原稿Sが制限部材1211を押して退避させるので、原稿Sの不送りは発生しない。
なお、このような制限部材1211は、分離ローラ12との間で分離給送部の左右両側において原稿Sが摺接するように設けられているため、その摺接部分でも少なからず紙粉が発生するおそれがある。本実施形態では、上述したように重送検知センサ40及び移動検知センサ45を各給送ローラ部11の隙間から下流側へ延びる下流領域Z2に設けているので、これら各センサ40、45が、制限部材1211が摺接して発生する紙粉の影響を有効に回避することができる。
また、図8に示すように、複数の給送ローラ110の間の位置に、原稿Sの到達を検知するための原稿検知センサ90を設けている。原稿検知センサ90は、検知センサ軸90aで軸支されており、自重でぶら下がっている。到達する原稿Sの種類に依らずに検知センサ軸90aを中心に退避可能にするために、できるだけ軽く、回動動作に対する摩擦などによる抵抗がほとんどなくなるように構成されている。
原稿検知センサ90の上流側には、給送ローラガイド17が設けられている。給送ローラガイド17は、給送ローラ110の上流側に設けられたガイド軸17aによって軸支され、給送方向下流側に向けて延在している。
給送ローラガイド17は、図13に示すガイド付勢手段17bによって、先端が給送ローラ110側から分離ローラ12側に移動するように給送方向と直交する方向(搬送原稿の厚み方向)に付勢されており、載置台1上に原稿Sが存在しない場合には、給送ローラ110の軸方向(図13に示す方向)から見た際に、先端が給送ローラ110の外周から飛び出す位置まで付勢された状態で、不図示の突き当て部によって位置決めされている。
この給送ローラガイド17によって、複数の原稿Sが載置台1に載置される場合には、図11に示すように付勢手段に抗して給送ローラガイド17が給送ローラ110側に付勢される。また、原稿Sが少ない場合、特に、薄紙の原稿Sが1枚だけ載置台1に載置される場合など、載置する原稿Sが少ない場合などには、図11に示すように、給送ローラガイド17によって原稿を分離ローラ12側に付勢される。
そして、原稿Sの先端が給送ローラガイド17に摺接している間は、原稿Sが給送ローラ110に当接しないようにしている。この構成によって、原稿Sを載置台1にセットするとき、原稿Sが少ない場合などに、原稿Sが給送ローラ110に引っ掛かってしまい所定のセット位置にセットできないということを防ぐことができる。
なお、本実施形態においては、図8に示すように、給送ローラ110の両脇および給送ローラ110の間に給送ローラガイド17における分離ローラ12側(給送方向下流側)の先端が配置されるように、給送ローラガイド17を設けているため、載置台1上の原稿束が少なくなってきたときなどに、原稿Sの先端が給送ローラ110に当接してしまうことをより確実に防ぐことができる。
また、給送ローラガイド17によって、局所的に原稿Sを持ち上げて、原稿Sに対するコシ付けを行うことができる。本実施形態における給送ローラガイド17によれば、複数の給送ローラガイド17が、給送ローラ110の上流側において原稿Sを持ち上げる方向に付勢し、コシ付けを行った状態で、給送ローラ110と分離ローラ12との間のニップに原稿Sを突入させることができる。
加えて、それでもコシの弱い原稿Sに対しては上述したような制限部材1211が当接してニップに突入する原稿Sの量を制限できるため、原稿S先端のめくれや紙詰まりの発生を効果的に抑制することができる。ここで、本実施形態において原稿先端のめくれとは、めくれた結果、原稿に皺が寄ったまま給送される状態も含む。
なお、本実施形態においては、給送ローラ110および給送ローラガイド17を覆うように、図4に示すカバー部材a3が設けられている。給送ローラ110のカバー部材a3における原稿が摺接する面とは反対側(図12における下方側)に対して給送ローラガイド17のガイド軸17aおよびガイド付勢手段17bが取り付けられており、カバー部材a3と給送ローラガイド17とで一体のユニットを構成している。
給送ローラ110のカバー部材a3を取り外すことによって、給送ローラ110の軸や軸受が露出し、給送ローラ110をシート搬送装置Aから着脱することが可能となる。なお、給送ローラ110のカバー部材a3には、原稿ストッパー14の先端が収納される位置に凹形状の収納部を設けている。
本実施形態においては、制限部材1211が分離揺動部材121に支持されることにより、給送ローラ110や分離ローラ12が摩耗した場合でも給送性能の悪化を抑制できる。
図14(a)のように分離揺動部材121ではなく揺動しない固定部品15に制限部材1211を支持した構成では、給送ローラ110や分離ローラ12が摩耗したときに、分離ローラ12が給送ローラ110側に圧接されるため、図14(b)のように給送ローラ110や分離ローラ12の軸間ピッチmが短くなり、制限部材1211と給送ローラ110の隙間n’が隙間nよりもが大きくなり、給送時に図11における空間Kが大きくなるため原稿先端のめくれや紙詰まりの低減作用は小さくなる。
しかし、図15(a)のように、揺動する分離揺動部材121に制限部材1211を支持した構成にすれば、給送ローラ110や分離ローラ12が摩耗したときに、図15(b)のように給送ローラ110や分離ローラ12の軸間ピッチmが短くなっても、制限部材1211と給送ローラ110の隙間n’’が分離ローラ12の摩耗分だけ隙間nよりも小さくなる。
そのため、給送時に図11における空間Kが図14(b)のように大きくならないので、ジャム等の給送の問題を抑えることができる。実際には、分離ローラ12の摩耗量は、給送ローラ110の摩耗量に比べて小さく、隙間n’’が狭くなり過ぎて給送できなくなるということはない。
図16に示すように、本実施形態におけるリブ部121b及び制限部材1211は、給送ローラ110の摩擦部材11cの対向側に配置される。摩擦部材11cはゴム等の材料で原稿Sをグリップし易いよう給送ローラ110のローラ外周に形成されたものである。
給送ローラ110が2つの摩擦部材11cを有し、2つの分離ローラ12の両脇にリブ部121b及び制限部材1211が配置される。リブ部121b及び制限部材1211を摩擦部材11cに対向させることで、リブ部121b及び制限部材1211と摩擦部材11cの間に原稿Sが挟まれて摩擦部材11cの摩擦力が上がるため、原稿Sの搬送力がアップし原稿Sの不送りが防止される。
換言すると、給送ローラ110に対し、幅の狭い分離ローラ12を設け、給送ローラ110に対しては、分離ローラ12が配置されていない部分のスペースを用いて制限部材1211を設けている。こうすることによって給送ローラ110の幅に対して必要な分離ローラ12の幅を確保しながら、制限部材1211を配置することができ、特に、本実施形態のように、搬送路が鉛直方向に立っている比較的小型の原稿給送装置における小型化に有効である。
リブ部121b及び制限部材1211の配置はこれに限るものではない。図17のように、リブ部121b及び制限部材1211を2つの分離ローラ12の間に配置してもよい。
このように配置しても、図16の態様と同様に、リブ部121b及び制限部材1211と摩擦部材11cの間に原稿Sが挟まれて摩擦部材11cの摩擦力が上がるため、原稿Sの搬送力がアップし原稿Sの不送りを好適に防止することができる。
また、図18、図19のように、リブ部121b及び制限部材1211を摩擦部材11cと対向しない位置、つまり給送ローラ110のスラスト方向にずらした位置に配置してもよい。
リブ部121b及び制限部材1211は、図18では2つの摩擦部材11cの間に配置され、図19では2つの摩擦部材11cの両脇に配置される。このように配置した場合、給送ローラ110と対向しないため、制限部材1211と摩擦部材11cとの間に原稿Sを挟む作用は低減するが、実質的に挟んでおり摩擦力は向上でき、制限部材1211による軽い原稿束に対して退避せずに押圧する作用は発揮することができ、給送性能を向上することができる。
図20は、リブ部121bと制限部材1211の配置を説明するための断面図である。図20(b)のようにリブ部121b及び制限部材1211は摩擦部材11cの対向側で給送ニップに近い場所に配置される。
これにより給送ローラ110外径の搬送路に露出する距離(ローラ外径の上流の点aから突出部121dの対向の点bまで)が長くなり、原稿束が接触する給送ローラ110の面積が大きくなって搬送力をアップできる。
具体的には、図16のようにリブ部121b及び制限部材1211を分離ローラの両脇に配置することで、摩擦部材11cの対向側かつ給送ニップに近い場所に配置でき、搬送力を強くすることができる。
より詳述すると、図20(b)に示すように、制限部材1211における給送ローラ110側に形成された面1211eが、分離ローラ12の外周面とそのスラスト方向(給送方向と直交する方向)で重なり、同一な外形面を形成するように配置している。こうすることで、給送される原稿Sに対して制限部材1211によって浮き等を抑えることができ、搬送性能を向上できる。
但し、制限部材1211の配置は上記の構成に限るものでは無く、重い原稿束を搬送することがなく給送の搬送力が小さくてかまわない装置等では、図20(a)のように、摩擦部材11c外径における搬送路に露出する距離(ローラ外径の上流の点aから突出部121dの対向の点bまで)を短くしてもかまわない。
制限部材1211は図9に示すように、原稿束の突き当たる突き当て面1211cと傾斜面1211dを有する。突き当て面1211cは給送方向に対して略垂直であり、傾斜面1211dが突き当て面1211cの給送ローラ110側で給送方向に傾斜した面である。
そして、突き当て面1211cを給送方向に対して略垂直にすることにより、原稿束の上層部が給送ニップに入ることを抑止し、傾斜面1211dを突き当て面1211cの給送ローラ110側で給送方向に傾斜した面にすることにより、原稿束の下層部が給送ニップに入り易くすることができる。
また、本実施形態においては、図8に示すように、給送ローラ110を回転駆動する給送ローラ軸11bと各給送ローラ110との間にはワンウェイクラッチ11aが設けられている。
すなわち、給送ローラ110によって送り出された原稿Sが、その下流側に設けられ、給送ローラ110よりも周速度の速い搬送ローラ21によって引き抜かれようとする際に、給送ローラ110が原稿Sによって連れ回りする方向への回転が可能なように構成されている。
その場合、給送ギア部112に駆動力を伝達する駆動ギア(不図示)と給送ギア部112との間の当たり方としては、後述する回転規制手段によって駆動ギアが給送ギア部112を駆動する状態における当接状態を維持することになる。
回転規制手段が無い場合では、この状態において、原稿Sが給送ローラ110から抜けると、給送ローラ110に圧接する分離ローラ12により上流側へ給送ローラ110を押し戻そうとしてしまうことがある。このとき、給送ギア部112と駆動ギアとの間に存在するバックラッシ分だけ、給送ローラ110および給送ギア部112が負方向に回転してしまい、そうすると載置台1に載置された原稿Sの先端が戻される可能性がある。
原稿Sの先端が負方向に戻されてしまった場合には、給送性能の低下につながるが、これを防止するために、本実施形態においては、例えば、回転規制手段として、給送ローラ軸11bの軸方向において各給送ローラ部11の位置を決めるための付勢手段(例えば圧縮バネ等)を設けることが好ましい。
このような付勢手段は、ホイール部111と給送ローラ軸11bの軸受110aとの間に設けてもよいが、本実施形態のように給送ギア部112を各給送ローラ部11の間に設ける場合には、給送ギア部112と各給送ローラ部11との間に設けるのが好ましい。
これにより、各給送ローラ部11は、給送ローラ軸11bの軸方向において給送ローラ軸11bの両端部側(軸受110a側)にそれぞれ付勢され、給送ギア部112を給送ローラ軸11bの中央部に配置することができる。
そのため、駆動ギア軸102からの駆動伝達位置が給送ローラ110の中央部、すなわち、給送ローラ軸11bの長手方向の中央部となり、左右の給送ローラ部11の荷重バランスが安定化し、給送性能を向上することができる。なお、一方の軸受110aは、概略U字形に構成されており、装置本体A1に対して回転しないように固定される。
この構成により、原稿Sが負方向に戻されることを防止できると共に、給送ギア部112と駆動ギア軸102との間のバックラッシ分だけ給送ギア部112が戻されることによってギア同士が衝突することによる打音の発生を防ぐことができる。
本実施形態において付勢手段を設ける場合には、上述の通り、ギア同士の接触による打音の発生を防ぐことができるため、シート搬送装置Aの静音化が図れるだけでなく、特に、給送ローラ110近傍に、音を検出可能なセンサ(マイク)などの音検出手段を設ける場合には、原稿Sのジャム(紙詰まり)を検出するシート搬送装置Aなどにおいて顕著な効果を得ることができ、ジャム(紙詰まり)検出の精度を向上できる。
(第2の実施形態)
第2の実施形態の装置構成は、第1の実施形態の装置構成と略同じであり、異なる点は、超音波の発信部41、受信部42および移動検知センサ45の基板への実装の振り分け方である。
図1によれば、超音波の発信部41は、移動検知センサ45と搬送路RTに対して同じ側に位置する。図23のように、これらのセンサ、超音波の発信部41と移動検知センサ45をそれぞれ別の基板100Aおよび100Bに実装する。
図5に示した給送ローラ110の中央部が狭い場合や移動検知センサ45を制御するデバイスと移動検知センサ45を接続する経路で狭い箇所がある場合、一般のプリント基板では、移動検知センサ45を配置できない恐れがある。そこで、図24(a)または(b)のように、移動検知センサ45をFPC(Flexible Printed Circuits)に実装する。図24では、移動検知センサ45は、第1筐体U1側に設けている構造を例示しているが、もちろん、第2筐体U2側に設けてもよい。
FPCはそれ自体が薄く折り曲げ可能なので、折り曲げることによって狭い箇所に基板配線を通すことが可能となる。その為、給送ローラ110の中央部が狭い場合においても、移動検知センサ45を配置可能である。第1の実施形態に比べ第2の実施形態は、図5に示した給送ローラ110や分離ローラ12を避けて両センサを配置する際の自由度が上がり、装置の小型化につながる。
(第3の実施形態)
上記第1の実施形態の装置では、移動検知センサ45を重送検知センサ40よりも給送方向の上流側に設け、移動検知センサ45と重送検知センサ40とを一列に配置した構造で、両センサ間の距離が離れている為に、個別に搬送路中に貫通穴を設け、両センサの検知対象を検知可能とする構成について説明した。一方で、本実施形態では、移動検知センサ45と重送検知センサ40間の距離を短くし、両センサに対して共通の貫通穴を設けても良い。
また、図25に示すように、重送検知センサ40をニップ部N側に近づけて配置して、移動検知センサ45と近付けることができれば、移動検知のみならず重送検知についても早期に検知することが可能となる。
上記第1の実施形態の装置では、移動検知センサ45を重送検知センサ40よりも給送方向の上流側に設け、移動検知センサ45と重送検知センサ40とを一列に配置した構造について説明したが、本実施形態では、図25(a)及び図25(b)に示すように、移動検知センサ45を別の領域に設けた例である。
例えば、図25(a)に示すように、給送ローラ110の給送ローラ軸11bの軸方向両側において、給送ローラ部11と分離ローラ12とが接圧されていない部分、すなわち、ニップ部N以外の部分から給送方向下流側の下流領域Z2の一方側に移動検知センサ45を設けるようにしてもよい。これにより、重送検知センサ40をニップ部N側に近づけて配置することが可能となり、重送検知を早期に検知することが可能となる。この場合、上記下流領域Z2の一方側だけでなく他方側、すなわち、下流領域Z1の両側に移動検知センサ45を設け、原稿の移動を左右で追跡検知するようにしてもよい。
また、図25(b)に示すように、給送ローラ110Aの給送ローラ部11と分離ローラ12とのニップ部Nを給送ローラ部11の中央部に配置し、その両側は給送ローラ11と分離ローラ12とが接圧されない部分とした分離給送部とした場合には、各給送ローラ部11の隙間で重送検知センサ40を配置するスペースを広く設けることができる。この場合、図示するように、給送ローラ110Aの給送ローラ軸11の軸方向一方側において、図25(a)と同様に、移動検知センサ45を設けてもよい。この場合でも、上記下流領域Z2の一方側だけでなく他方側、すなわち、下流領域Z1の両側に移動検知センサ45を設け、原稿の移動を左右で追跡検知するようにしてもよい。
なお、本発明は勿論これに限定されず、図26に示すように、各給送ローラ部11の隙間側に分離ローラ12を接圧しない部分を設ける場合には、各給送ローラ11の隙間を広げられる。そのため、各給送ローラ11の隙間から下流側の下流領域Z2を幅広に形成できるため、この下流領域Z2に対して、図26に示すように、重送検知センサ40及び移動検知センサ45を給送方向に対して直交する幅方向に併設してもよい。
また、図26に示すような重送検知センサ40及び移動検知センサ45の設置を行う場合には、給送ローラ軸11bの軸方向において、給送ローラ110Aにおける各給送ローラ部11の両外側のローラ端部まで分離ローラ12を接圧するようにしてもよい。
(第4の実施形態)
本実施形態では、図27に示すように、給送ローラ110のうち各給送ローラ部11の隙間内に対向して、移動検知センサ45を配置してもよい。この場合には、給送ローラ部11と分離ローラ12とで形成するニップ部Nの直後で且つ紙粉の影響が少ない場所で、原稿の移動(斜行)を検知できるため、綴じ原稿の分離給送における斜行等の異常時には即座に分離給送動作を一時停止させることができる。また、重送検知センサ40に到達する前に上述した斜行検知を行うことができれば、重送検知センサ40の検知をOFFするような制御を行ってもよい。
なお、本実施形態では、給送ローラ110を覆うカバー部材a3を配置している。この場合、カバー部材a3を貫通して窓部(図示なし)を設けておき、カバー部材a3を閉じたときに、カバー部材a3が有する窓部を装置本体側の移動検知センサ45に対向させる。これにより、各給送ローラ部11の隙間に移動検知センサ45を配置し、当該窓部を通して、左右のニップ部で姿勢が比較的安定している原稿の移動を移動検知センサ45によって追跡検知できる。また、このような移動検知センサ45の検知領域は、紙粉の影響が少なく、高精度な追跡検知が可能となる他、ニップ部の直後での原稿の移動を追跡でき、給送異常等を即座に検知できるため、例えば、原稿へのダメージが発生する前に、分離給送動作の一時停止やエラー処理など、その後の対処を適切に行うことができる。
(他の実施形態)
以上、本発明を各実施形態に基づいて詳細に説明したが、本発明は上述した各実施形態に限定されるものではない。
上述した各実施形態では、給送ローラ110が有する2つの給送ローラ部11の間に対応して給送ギア部112を設けた構成を挙げて説明したが、本発明は勿論これに限定されず、例えば、図28に示すように、給送ローラ110が有する回転軸の一端部側に給送ローラ110への駆動伝達を行う給送ギア部112を設け、回転軸の他端部が軸受によって回転可能に保持された給送ローラ110を採用してもよい。
また、上述した各実施形態では、2つのモータ3、4を使った原稿搬送装置を例示したが、本発明は勿論これに限定されず、例えば、図29に示すように、1つのモータによって原稿搬送装置の駆動系を制御するようにしてもよい。
図29に示すような原稿搬送装置とした場合には、原稿の搬送方向に直交する装置の幅方向一方側にある単一のモータMの駆動力を、搬送路を跨ぐように配置された搬送ローラ21の搬送ローラ軸21aを使って装置の幅方向他方側にある駆動伝達機構Xに対して搬送路を跨いで伝達する。
これにより、単一のモータMの駆動力を給送ローラ110や分離ローラ12に対して伝達することが可能となり、複数のモータを使う構成と比べて、部品点数を減らすことで、小型化又は低コスト化や軽量化に適した原稿搬送装置を実現できる。
また、上述した各実施形態では、給送ローラ部11をホイール部111に対して着脱自在に設けた構造例を用いて説明したが、本発明は勿論これに限定されず、例えば、ワンウェイクラッチ11aを給送ローラ軸11bに残し、それ以外のホイール部111を含めて取り外すようにしてもよい。
あるいは、図30に示すように、ホイール部111を径方向に二分割し、内側ホイール部(第1コア部)111aをワンウェイクラッチ部11aに嵌合し、外側ホイール部(第2コア部)111bを給送ローラ部11に接合して、外側ホイール部111bと共に給送ローラ部11を内側ホイール部111aの外周に対して着脱自在に設けてもよい。この場合、給送ローラ部11及び外側ホイール部111bが交換部品となる。
また、上述した各実施形態では、分離ローラ12への駆動伝達を分離ローラ12の軸に対してその一端部側から行う構造を例示して説明したが、本発明は勿論これに限定されず、例えば、図31に示すような分離ローラの構造としてもよい。
図31に示すように、分離ローラ12の構成としてその軸方向左右にローラを二分割した構成を適用する場合、それら各ローラ間の軸部12bに対して駆動伝達用のギア部12aを設けて、給送ローラ110と同様に各ローラ間で左右のバランス差のない駆動伝達構造を適用した改良型の分離ローラ12としてもよい。
このような分離ローラ12のギア部12aに対しては、駆動伝達機構Xに対して一端が接続された回転軸Gaの他端側に動力伝達用のギア部G1、G2を通じて、モータ3の駆動力が伝達される。そして、分離ローラ12の軸部12bの両端部12cは、それぞれ図示しない軸受に回転可能に保持される。
このような改良型の分離ローラ12とすれば、給送ローラ110及び分離ローラ12のそれぞれにおいて左右のガタ付き等を低減できるため、分離給送性能が更に向上するだけでなく、給送ローラ110において個別のワンウェイクラッチ部11aを設ければ、斜行連鎖の抑制効果を更に高めることもできる。
また、上述した実施形態において説明したように、分離ローラ12は、分離揺動部材121に対して揺動可能に取り付けられている。この分離ローラ12への駆動伝達用のギア部が分離ローラ12の軸方向における一方端側にある場合、ギア部が設けられた側はギア部が負荷となるため揺動動作を行いづらくなり、他方端側が揺動し易くなる。
これによって、左右の揺動動作に差異が生じ、分離ローラ12の回転軸などにアンバランスな負荷が生じてしまう。これに対し、ギア部を各ローラ間に設けることによって左右の揺動動作の差異を低減することで、給送ローラへの押し付け力が均等になることで、給送時の原稿の斜行を抑えることができる。
なお、上述したような改良型の分離ローラ12を採用する場合、上述した各実施形態における給送ローラ110、すなわち、各給送ローラ部11が設けられるホイール部111に個別のワンウェイクラッチ部11aを設けず、更に給送ローラ部11の間に給送ギア部112を設けた給送ローラ110を採用しなくてもよいし、あるいは、各給送ローラ部11が設けられるホイール部111に個別のワンウェイクラッチ部11aを設け、給送ギア部112を各給送ローラ110の間に設けていない給送ローラを採用してもよい。
また、上述したような改良型の分離ローラ12を採用する場合、給送ローラの各給送ローラ部内においてワンウェイクラッチを設けず、給送ローラの各給送ローラ部間にある給送ギア部に駆動伝達する駆動ギア部にワンウェイクラッチを設けてもよい。
この場合でも、給送ローラに対する駆動伝達が各給送ローラ部の間で行われるため、分離ローラからの付勢を受けても、給送ローラ部において左右均等な応力バランスでの分離給送を実現できる。また、このように駆動ギア部にワンウェイクラッチを設ける場合、各給送ローラのホイール部を相互に連結した構成として各給送ローラ部間の距離を一定に保つようにすることができる。
ここで、上述した実施形態においては、重送検知センサ40のうち超音波の受信部42の基板102上に移動検知センサ45を実装した構造について説明したが、その実装形態については特に限定されないが、例えば、図32及び図33に示すような構造とするのが良い。
図32(a)に示すように、基板102の経路RT側の上面に対し、移動検知センサ45が有する光源451及び撮像部452をそれぞれ実装し、基板102に接続されたケーブルCを通じて通電が行われる。また、移動検知センサ45は、基板102上において光源451及び撮像部452を取り囲むように筒状部材453が配置され、更に当該筒状部材453の開口には光透過部材(光学フィルタやガラス基板)454が経路RTに対して傾斜して設けられる。
このような移動検知センサ45が実装された基板102は、第2筐体U2の経路RT側とは反対側の裏面に取付部材102aを介して接合される。このとき、第2筐体U2には、超音波の受信部42及び移動検知センサ45に対向する部分に貫通孔がそれぞれ設けられている。これにより、第2筐体U2に装着された基板102上において、経路RTから超音波の受信と原稿移動をそれぞれ検知することができる。なお、超音波の発信部41が実装された基板101は、取付部材101aを介して第1筐体U1に接合される。
他の形態としては、図32(b)に示すように、基板102上に台座102bを設け、その台座102bの上面に対し、移動検知センサ45を設けるようにしてもよい。これにより、経路RTに近い場所で原稿の移動検知を行うことができる。
なお、図32で示す構造では、移動検知センサ45を基板102側に設けた構造で説明したが、超音波の発信部41が実装された基板101に対して移動検知センサ45を設けてもよいし、経路RTを挟むように両側の基板101、102に対してそれぞれ設けるようにしてもよい。後者の場合には、それぞれの移動検知センサ45の出力値の違いによって重送を検知することが可能となる。付箋などが付与された原稿の場合、重送検知センサ40によって重送と検知してしまうが、両側の移動検知センサ45によれば、重なった原稿の移動を別々に検知することができるため、重送状態を簡易に検知することが可能となる。
また、図33(a)に示すように、移動検知センサ45の光源451、撮像部452が実装されたセンサ基板(第3基板)455を、超音波の受信部42が実装された基板102に対して例えばFFCなどのケーブルC1やFPCによって接続し、通信及び通電可能に設けてもよい。この場合には、センサ基板455は、第2筐体U2に設けられた貫通孔のうち経路RT側とは反対側の周縁部に対して連結部材452を介して固定される。これにより、経路RTの近くで移動検知センサ45による原稿の移動が検知し易くなる。あるいは、図33(b)に示すように、基板102の経路RT側の一方面上にリード線102bを介してセンサ基板455を電気的に接続されていてもよい。
なお、図32(a)及び図32(b)、図33(b)に示すように、第2筐体U2と移動検知センサ45とは直接接合せず、所定の隙間をあけて配置される。これにより、給搬送系の駆動に伴う振動が第2筐体U2を通じて移動検知センサ45に直接伝達されることを防ぐことができる。