JP6925535B2 - 操舵制御装置 - Google Patents
操舵制御装置 Download PDFInfo
- Publication number
- JP6925535B2 JP6925535B2 JP2020533938A JP2020533938A JP6925535B2 JP 6925535 B2 JP6925535 B2 JP 6925535B2 JP 2020533938 A JP2020533938 A JP 2020533938A JP 2020533938 A JP2020533938 A JP 2020533938A JP 6925535 B2 JP6925535 B2 JP 6925535B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- assist amount
- vehicle
- cutoff frequency
- cross slope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001133 acceleration Effects 0.000 claims description 19
- 230000007423 decrease Effects 0.000 claims description 13
- 238000000034 method Methods 0.000 description 26
- 238000010586 diagram Methods 0.000 description 25
- 230000008859 change Effects 0.000 description 18
- 230000008569 process Effects 0.000 description 13
- 230000002452 interceptive effect Effects 0.000 description 9
- 230000004044 response Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000005484 gravity Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/04—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to forces disturbing the intended course of the vehicle, e.g. forces acting transversely to the direction of vehicle travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0409—Electric motor acting on the steering column
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
図1は、本発明の実施の形態1における操舵制御装置12とその周辺装置の構成を示す図である。
θ=arcsin((dvy/dt+V・γ−Gy)/g)
≒arcsin((V・γ−Gy)/g) (1)
本発明の実施の形態2では、先の実施の形態1の構成に対して、処理器24およびアシスト量補正器22を備えて構成されている操舵制御装置12について説明する。なお、実施の形態2では、先の実施の形態1と同様である点の説明を省略し、先の実施の形態1と異なる点を中心に説明する。
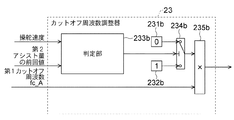
本発明の実施の形態3では、先の実施の形態2の構成に対して、アシスト量補正器22の代わりに、カットオフ周波数調整器23を備えて構成されている操舵制御装置12について説明する。なお、実施の形態3では、先の実施の形態1および2と同様である点の説明を省略し、先の実施の形態1および2と異なる点を中心に説明する。
本発明の実施の形態4では、先の実施の形態1〜3と異なる方法によってアシスト量演算器19が第1アシスト量を演算するように構成されている操舵制御装置12について説明する。なお、実施の形態4では、先の実施の形態1〜3と同様である点の説明を省略し、先の実施の形態1〜3と異なる点を中心に説明する。
Claims (13)
- 車両が走行する路面の横断勾配を推定する横断勾配推定器と、
前記横断勾配推定器によって推定された前記横断勾配に基づいて第1アシスト量を演算するアシスト量演算器と、
前記アシスト量演算器によって演算された前記第1アシスト量に対して、ローパスフィルタ処理を施し、前記ローパスフィルタ処理後の前記第1アシスト量を、第2アシスト量として出力するローパスフィルタと、
前記ローパスフィルタによって出力される前記第2アシスト量を用いて、操舵アシストトルクを発生させるモータを制御するモータ制御器と、
を備え、
前記ローパスフィルタは、
前記第2アシスト量が増加変化する場合と、前記第2アシスト量が減少変化する場合とに応じて、前記ローパスフィルタのカットオフ周波数を、第1カットオフ周波数と、前記第1カットオフ周波数よりも高い値に設定される第2カットオフ周波数との間で切り替える
操舵制御装置。 - 前記ローパスフィルタは、
前記第2アシスト量が増加変化する場合には、前記カットオフ周波数を前記第1カットオフ周波数にし、前記第2アシスト量が減少変化する場合には、前記カットオフ周波数を前記第2カットオフ周波数にする
請求項1に記載の操舵制御装置。 - 前記アシスト量演算器によって演算された前記第1アシスト量を、前記車両の操舵状態に応じて補正するアシスト量補正器をさらに備えた
請求項1または2に記載の操舵制御装置。 - 前記アシスト量補正器は、前記車両のハンドルを介してステアリング軸に作用する操舵トルクを検出する操舵トルクセンサによって検出された前記操舵トルクを、前記操舵状態として取得し、取得した前記操舵トルクに応じて、前記第1アシスト量を補正する
請求項3に記載の操舵制御装置。 - 前記アシスト量補正器は、前記モータの回転角度を検出するモータ回転角度センサによって検出された前記回転角度を微分することで得られる操舵速度を、前記操舵状態として取得し、取得した前記操舵速度に応じて、前記第1アシスト量を補正する
請求項3に記載の操舵制御装置。 - 前記アシスト量補正器は、前記車両のギア位置が後退ギアであるか否かを示す後退ギア判定を、前記操舵状態として取得し、取得した前記後退ギア判定に応じて、前記第1アシスト量を補正する
請求項3に記載の操舵制御装置。 - 前記ローパスフィルタの前記第1カットオフ周波数を、前記車両の操舵状態に応じて調整するカットオフ周波数調整器をさらに備えた
請求項1または2に記載の操舵制御装置。 - 前記カットオフ周波数調整器は、前記車両のハンドルを介してステアリング軸に作用する操舵トルクを検出する操舵トルクセンサによって検出された前記操舵トルクを、前記操舵状態として取得し、取得した前記操舵トルクに応じて、前記第1カットオフ周波数を調整する
請求項7に記載の操舵制御装置。 - 前記カットオフ周波数調整器は、前記モータの回転角度を検出するモータ回転角度センサによって検出された前記回転角度を微分することで得られる操舵速度を、前記操舵状態として取得し、取得した前記操舵速度に応じて、前記第1カットオフ周波数を調整する
請求項7に記載の操舵制御装置。 - 前記カットオフ周波数調整器は、前記車両のギア位置が後退ギアであるか否かを示す後退ギア判定を、前記操舵状態として取得し、取得した前記後退ギア判定に応じて、前記第1カットオフ周波数を調整する
請求項7に記載の操舵制御装置。 - 前記横断勾配推定器によって推定された前記横断勾配に対して、レートリミッタ処理および不感帯処理の少なくとも一方の処理を施す処理器をさらに備えた
請求項1から10のいずれか1項に記載の操舵制御装置。 - 前記横断勾配推定器は、前記車両の車速を検出する車速センサによって検出された前記車速と、前記車両のヨーレートを検出するヨーレートセンサによって検出された前記ヨーレートと、前記車両の横加速度を検出する横加速度センサによって検出された前記横加速度とに基づいて、前記横断勾配を推定する
請求項1から11のいずれか1項に記載の操舵制御装置。 - 前記横断勾配推定器は、前記車両の自車位置と、前記自車位置に対応する横断勾配および路面曲率とが関連付けられた走行路情報を記憶し、前記自車位置推定器によって推定された前記自車位置に対応する前記横断勾配および前記路面曲率を、前記走行路情報から推定し、
前記アシスト量演算器は、前記車両の車速を検出する車速センサによって検出された前記車速と、前記横断勾配推定器によって推定された前記横断勾配および前記路面曲率とに基づいて、前記第1アシスト量を演算する
請求項1から11のいずれか1項に記載の操舵制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/028665 WO2020026342A1 (ja) | 2018-07-31 | 2018-07-31 | 操舵制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020026342A1 JPWO2020026342A1 (ja) | 2020-12-17 |
| JP6925535B2 true JP6925535B2 (ja) | 2021-08-25 |
Family
ID=69232219
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020533938A Active JP6925535B2 (ja) | 2018-07-31 | 2018-07-31 | 操舵制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11891136B2 (ja) |
| EP (1) | EP3831694B1 (ja) |
| JP (1) | JP6925535B2 (ja) |
| CN (1) | CN112512900B (ja) |
| WO (1) | WO2020026342A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019206980B4 (de) * | 2019-05-14 | 2023-06-22 | Volkswagen Aktiengesellschaft | Verfahren und Lenkungssteuergerät zum Ermitteln einer Stellgröße für das Einstellen eines Servolenkmoments bei einem Fahrzeuglenksystem |
| JP7323487B2 (ja) * | 2020-04-06 | 2023-08-08 | 日野自動車株式会社 | 車両制御装置 |
| KR102745130B1 (ko) * | 2020-05-06 | 2024-12-23 | 현대모비스 주식회사 | 전동식 조향시스템의 제어 장치 및 방법 |
| CN114435371B (zh) * | 2022-03-25 | 2024-03-01 | 北京主线科技有限公司 | 一种道路坡度估计方法和装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3060863B2 (ja) * | 1994-12-14 | 2000-07-10 | トヨタ自動車株式会社 | 車両の挙動推定装置 |
| JP3951205B2 (ja) * | 1998-05-19 | 2007-08-01 | 株式会社デンソー | パワーステアリング方法およびパワーステアリング装置 |
| JP4123158B2 (ja) | 2004-02-06 | 2008-07-23 | 三菱自動車工業株式会社 | 車両用パワーステアリング装置及び車両用外乱推定装置 |
| JP4430483B2 (ja) * | 2004-08-05 | 2010-03-10 | 本田技研工業株式会社 | パワーステアリング装置 |
| JP2007112366A (ja) * | 2005-10-24 | 2007-05-10 | Nissan Motor Co Ltd | パワーステアリング装置 |
| JP4906333B2 (ja) * | 2005-12-08 | 2012-03-28 | トヨタ自動車株式会社 | 車両の操舵装置 |
| JP2008062816A (ja) * | 2006-09-08 | 2008-03-21 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
| JP5238441B2 (ja) | 2008-10-03 | 2013-07-17 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP5444819B2 (ja) | 2009-04-27 | 2014-03-19 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP5499526B2 (ja) * | 2009-06-19 | 2014-05-21 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| CN102030034B (zh) * | 2010-09-17 | 2013-05-08 | 杭州正强电子技术有限公司 | 一种电动助力转向助力控制方法 |
| JP2012131471A (ja) | 2010-11-29 | 2012-07-12 | Honda Motor Co Ltd | 電動ステアリング装置 |
| WO2013098944A1 (ja) * | 2011-12-27 | 2013-07-04 | トヨタ自動車株式会社 | 車両の積載状態推定方法及び装置 |
| JP5265752B2 (ja) * | 2011-12-29 | 2013-08-14 | 株式会社デンソー | 路面勾配推定装置、車両用制御装置、及び車両用制御システム |
| JP5751178B2 (ja) * | 2012-01-20 | 2015-07-22 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| EP2905207B1 (en) * | 2012-10-04 | 2016-12-28 | Nissan Motor Co., Ltd. | Steering control device |
| CN103786783B (zh) * | 2012-10-29 | 2018-10-26 | 福特全球技术公司 | 具有滚珠丝杠的动力转向系统 |
| JP6160860B2 (ja) * | 2013-06-11 | 2017-07-12 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| WO2015141253A1 (ja) * | 2014-03-19 | 2015-09-24 | 日立オートモティブシステムズステアリング株式会社 | 電動パワーステアリング装置及び電動パワーステアリング装置の制御装置 |
| US10099721B2 (en) * | 2014-11-19 | 2018-10-16 | Nsk Ltd. | Electric power steering apparatus |
| FR3037671B1 (fr) * | 2015-06-19 | 2017-06-16 | Jtekt Europe Sas | Utilisation d'un filtre a avance de phase pour separer le reglage du ressenti au volant du reglage de la stabilite d'une commande de direction assistee |
| JP2018114934A (ja) * | 2017-01-20 | 2018-07-26 | 株式会社ジェイテクト | 車両用制御装置 |
| JP7070376B2 (ja) * | 2018-11-30 | 2022-05-18 | トヨタ自動車株式会社 | 車両用外乱検出装置 |
-
2018
- 2018-07-31 CN CN201880095968.3A patent/CN112512900B/zh active Active
- 2018-07-31 WO PCT/JP2018/028665 patent/WO2020026342A1/ja unknown
- 2018-07-31 JP JP2020533938A patent/JP6925535B2/ja active Active
- 2018-07-31 EP EP18928456.5A patent/EP3831694B1/en active Active
- 2018-07-31 US US17/253,693 patent/US11891136B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN112512900A (zh) | 2021-03-16 |
| EP3831694B1 (en) | 2022-06-08 |
| US20210261190A1 (en) | 2021-08-26 |
| EP3831694A4 (en) | 2021-08-04 |
| WO2020026342A1 (ja) | 2020-02-06 |
| CN112512900B (zh) | 2022-09-20 |
| US11891136B2 (en) | 2024-02-06 |
| EP3831694A1 (en) | 2021-06-09 |
| JPWO2020026342A1 (ja) | 2020-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7957867B2 (en) | Steering system of vehicle | |
| JP6925535B2 (ja) | 操舵制御装置 | |
| US8997911B2 (en) | Vehicle | |
| JP6078124B1 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP4430459B2 (ja) | 車両のスタビライザ装置 | |
| US8234044B2 (en) | Steering control system for vehicle | |
| CN107914767B (zh) | 转向操纵辅助装置 | |
| JP6263527B2 (ja) | 自動車のパワーアシストステアリングのステアリングホイールのセンタリング方法 | |
| CN105324294A (zh) | 电动动力转向装置 | |
| JP5085510B2 (ja) | 電動パワーステアリング装置 | |
| US9896124B2 (en) | Steering control apparatus | |
| KR20200062409A (ko) | 차량 조향 시스템의 제어 장치 및 제어 방법 | |
| JP7032262B2 (ja) | 車両の操舵制御装置 | |
| JP5233190B2 (ja) | 旋回挙動制御装置、自動車、及び旋回挙動制御方法 | |
| JP6815572B1 (ja) | 電動パワーステアリング装置及び電動パワーステアリング装置用の制御装置 | |
| JP5068638B2 (ja) | 車両の後輪トー角制御装置および後輪トー角制御方法 | |
| JP4211049B2 (ja) | 自動車の操舵フィーリング設定装置 | |
| JP2003081118A (ja) | 自動車の電動パワーステアリング装置 | |
| JP2005059695A (ja) | 自動車の操舵フィーリング設定装置 | |
| JP2017001565A (ja) | 運転支援制御装置 | |
| JP2003137119A (ja) | 自動車の電動パワーステアリング装置 | |
| JP2010184509A (ja) | 後輪操舵装置 | |
| JPH04306169A (ja) | 四輪操舵車の後輪操舵角制御装置 | |
| JP2011063114A (ja) | 後輪操舵装置 | |
| JP2005059691A (ja) | 自動車の操舵フィーリング設定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200626 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210706 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210803 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6925535 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |