KR20200062409A - 차량 조향 시스템의 제어 장치 및 제어 방법 - Google Patents
차량 조향 시스템의 제어 장치 및 제어 방법 Download PDFInfo
- Publication number
- KR20200062409A KR20200062409A KR1020180146972A KR20180146972A KR20200062409A KR 20200062409 A KR20200062409 A KR 20200062409A KR 1020180146972 A KR1020180146972 A KR 1020180146972A KR 20180146972 A KR20180146972 A KR 20180146972A KR 20200062409 A KR20200062409 A KR 20200062409A
- Authority
- KR
- South Korea
- Prior art keywords
- side slip
- slip angle
- vehicle
- steering
- restoration
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 28
- 238000011084 recovery Methods 0.000 claims abstract description 18
- 230000007935 neutral effect Effects 0.000 claims abstract description 8
- 238000012937 correction Methods 0.000 claims abstract description 7
- 230000001133 acceleration Effects 0.000 claims description 8
- 208000035278 mandibuloacral dysplasia progeroid syndrome Diseases 0.000 description 11
- 238000010586 diagram Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 238000012854 evaluation process Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/103—Side slip angle of vehicle body
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0466—Controlling the motor for returning the steering wheel to neutral position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
- B62D6/003—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels in order to control vehicle yaw movement, i.e. around a vertical axis
- B62D6/005—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels in order to control vehicle yaw movement, i.e. around a vertical axis treating sensor outputs to obtain the actual yaw rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/008—Control of feed-back to the steering input member, e.g. simulating road feel in steer-by-wire applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/08—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque
- B62D6/10—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque characterised by means for sensing or determining torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0026—Lookup tables or parameter maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/20—Steering systems
- B60W2510/202—Steering torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/20—Steering systems
- B60W2510/205—Steering speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
- B60W2520/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/20—Sideslip angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
- B60W2710/202—Steering torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
- B60W2710/205—Steering speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/12—Lateral speed
- B60W2720/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/20—Sideslip angle
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
본 발명은 차량 조향 시스템의 제어 장치 및 제어 방법에 관한 것으로서, 주행 중인 차량에서 사이드 슬립각의 추정 및 적절한 복원 제어를 통해 운전자 운전 입력에 대한 차량 거동의 일체감을 증대시키는 동시에 차량의 안정성을 향상시킬 수 있는 차량 조향 시스템의 제어 장치 및 제어 방법을 제공하는데 주된 목적이 있는 것이다. 상기한 목적을 달성하기 위해, 조타 보조를 위한 어시스트 토크를 결정하는 어시스트 토크 결정 모듈; 조향휠을 중립 위치로 복원 회전시키기 위한 조향 복원 토크를 산출하는 복원 제어 모듈; 사이드 슬립각을 추정하는 사이드 슬립각 추정 모듈; 상기 추정된 사이드 슬립각에 따른 복원 제어 게인 값을 결정하는 사이드 슬립 제어 모듈; 상기 산출된 조향 복원 토크를 복원 제어 게인 값에 따라 보정하는 보정부; 및 상기 결정된 어시스트 토크를 상기 보정된 조향 복원 토크만큼 보상하여 최종의 어시스트 토크를 결정하는 토크 보상부를 포함하는 차량 조향 시스템의 제어 장치, 및 그 제어 방법이 개시된다.
Description
본 발명은 차량 조향 시스템의 제어 장치 및 제어 방법에 관한 것으로서, 더욱 상세하게는 주행 중인 차량에서 사이드 슬립각의 추정 및 적절한 복원 제어를 통해 운전자 운전 입력에 대한 차량 거동의 일체감을 증대시키는 동시에 차량의 안정성을 향상시킬 수 있는 차량 조향 시스템의 제어 장치 및 제어 방법에 관한 것이다.
일반적으로, 자동차의 조향시에 운전자의 조타력을 저감하기 위한 동력 조향(power steering) 시스템으로는, 유압펌프에 의해 형성된 유압을 이용하여 운전자의 조타력을 보조(assist)하는 유압식 조향(HPS:Hydraulic Power Steering) 시스템과, 전동모터의 출력 토크를 이용하여 운전자의 조타력을 보조하는 전동식 조향(MDPS:Motor Driven Power Steering System, 이하 'MDPS'라 함) 시스템이 알려져 있다.
이 중에서 MDPS 시스템은 운전자의 조향휠 조작에 따른 조타 보조 기능을 수행함에 있어서 조타 보조를 위한 전동모터(조향 모터)의 출력 토크(즉, 어시스트 토크)를 차량의 주행 조건에 따라 제어할 수 있으므로 유압식 조향 시스템에 비해 더욱 향상된 조타 성능과 조타감을 제공할 수 있다.
이에 따라 최근 출시되는 차량에는 모터 출력에 의해 생성되는 조타 보조력을 주행 조건에 따라 변화 및 제어할 수 있는 MDPS 시스템이 널리 적용되고 있다.
MDPS 시스템은 운전자 조향휠 조작에 따른 조향각(칼럼 입력각)을 검출하는 조향각 센서, 및 조향휠을 통해 입력되는 조타토크(조향휠 토크, 칼럼 토크)를 검출하는 토크 센서 등의 센서류와, 제어기(MDPS ECU), 조향 모터(MDPS 모터)를 포함하여 구성될 수 있다.
이러한 구성에서 제어기는 조향 모터의 구동 및 출력을 제어하기 위하여 상기 센서들의 신호로부터 조향각, 조향각속도, 조타토크 등의 운전자 조향 입력 정보를 취득한다.
여기서, 조향각은 조향휠의 회전위치를 나타내는 것이고, 조향각속도는 조향각의 미분을 통해 취해질 수 있는 조향휠의 회전각속도 값이며, 조타토크는 운전자가 조향휠에 가하는 토크, 즉 조향을 위한 운전자 입력 토크이다.
상기 제어기는 운전자 입력 토크인 조타토크가 토크 센서에 의해 검출되면, 상기 검출된 조타토크에 따라 조향 모터의 구동을 제어하여 조타 보조를 위한 어시스트 토크(assist torque)가 생성 및 출력되도록 한다.
통상의 MDPS 시스템에서 조향 모터의 출력 제어는 제어기가 조향 모터에 인가되는 모터 전류를 제어함으로써 이루어질 수 있다.
이때, 제어기는 토크 센서에 의해 검출되는 운전자 조타토크 등과 같이 차량에서 수집되는 정보에 기초하여 모터 출력의 목표 값인 어시스트 토크 값을 결정하고, 상기 결정된 어시스트 토크 값에 해당하는 만큼의 전류량을 튜닝된 대로 연산하여 조향 모터에 인가하는바, 이때의 모터 구동을 통해 운전자 조타력을 보조하기 위한 힘(조타 보조력)인 어시스트 토크를 발생시킨다.
상기 조향 시스템에서 조향휠을 통해 가해지는 운전자 조타력 및 모터에 의해 발생한 조타 보조력을 전달하기 위한 구성요소로는, 조향휠의 하부에 설치되는 조향 칼럼, 조향 칼럼으로부터 전달되는 회전력을 직진력으로 변환하여 타이어의 방향을 변경하는 기어박스, 조향 칼럼에 전달된 회전력을 기어박스로 전달하기 위한 유니버설 조인트 등을 포함할 수 있다.
여기서, 기어박스는 유니버설 조인트로부터 회전력을 전달받는 피니언 기어(pinion gear), 및 이 피니언 기어가 치합되는 랙(rack)이 형성된 랙 바를 포함할 수 있다.
상기 피니언 기어의 회전시 랙에 의해 랙 바가 좌우로 직진운동을 하는데, 이때 랙 바의 좌우 직진운동에 의해 작용하는 힘이 타이 로드(tie rod) 및 볼 조인트를 통해 타이어에 전달되어 타이어의 방향을 변경해주게 된다.
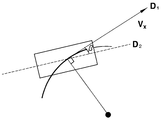
한편, 차량에서 사이드 슬립각(β)은 주행 중인 차량의 이동 방향에 대하여 차량의 미끌림 정도를 나타내는 각도로서, 도 1 및 도 2에 나타낸 바와 같이 차량의 속도 방향(D1)과 차량의 헤딩 방향(D2) 사이의 각도로 정의될 수 있다.
여기서, 차량의 속도는 차량의 종방향 속도(Vx)를 말하며, 도 1 및 도 2에서 차량의 속도 방향(D1)은 차량이 곡선 도로를 따라 이동하는 선회 주행을 할 때 선회 궤적의 접선 방향으로 정의될 수 있다.
주행 중인 차량에서 사이드 슬립각(β)이 작을수록 차량의 속도 방향(D1)과 헤딩 방향(D2)이 일치하는 것이므로 운전자의 운전 입력에 대한 차량 거동의 일체감이 증대될 수 있다.
또한, 사이드 슬립각(β)은 차량의 안정성과 관계되며, 차량의 사이드 슬립각(β)이 도 1에 나타낸 바와 같은 양(+)의 값인 경우, 차량의 헤딩 방향(D2)이 선회 궤적의 바깥쪽을 향하고 있을 때이므로 차량이 좀 더 안정적인 상태가 된다.
반면, 사이드 슬립각(β)이 도 2에 나타낸 바와 같은 음(-)의 값인 경우, 차량의 헤딩 방향(D2)이 선회 궤적의 안쪽을 향하고 있을 때이므로 차량 스핀이 발생할 우려가 있는 상태이다.
차량이 곡선 도로를 주행할 때 차량의 사이드 슬립각(β)은 차속(Vx)이 증가함에 따라 양의 값에서 점차 감소하여 음의 값이 될 수 있고, 차량의 스티어 특성에 따라 사이드 슬립각의 특성이 다르게 나타난다.
예를 들면, 언더스티어(understeer) 차량 상태에서는 차량의 사이드 슬립각(β)이 음의 값으로 감소하다가 일정 수준으로 수렴하고, 뉴트럴 스티어(neutral steer) 상태인 경우 차속(Vx)에 비례하여 사이드 슬립각이 음의 값으로 감소한다.
또한, 오버스티어(oversteer) 차량 상태에서는 특정 속도에서 사이드 슬립각이 음의 값으로 발산하면서 차량 스핀이 발생할 수 있다.
이와 같이 주행 중인 차량의 사이드 슬립각은 운전자의 운전 입력에 대한 차량 거동의 일체감과 차량 안정성에 관계되는 것으로서, 사이드 슬립각의 적절한 제어를 통해 차량 거동의 일체감을 증대시키는 동시에 차량의 안정성을 향상시킬 수 있는 기술이 요구되고 있다.
따라서, 본 발명은 상기와 같은 문제점을 해결하기 위하여 창출한 것으로서, 주행 중인 차량에서 사이드 슬립각의 추정 및 적절한 복원 제어를 통해 운전자 운전 입력에 대한 차량 거동의 일체감을 증대시키는 동시에 차량의 안정성을 향상시킬 수 있는 차량 조향 시스템의 제어 장치 및 제어 방법을 제공하는데 그 목적이 있다.
상기한 목적을 달성하기 위하여, 본 발명의 일 양태에 따르면, 차량에서 수집되는 운전자 조향 입력 정보와 차량 상태 정보에 기초하여 조타 보조를 위한 어시스트 토크를 결정하는 어시스트 토크 결정 모듈; 조향휠을 중립 위치로 복원 회전시키기 위한 조향 복원 토크를 산출하는 복원 제어 모듈; 차량에서 수집되는 차량 상태 정보에 기초하여 사이드 슬립각을 추정하는 사이드 슬립각 추정 모듈; 상기 사이드 슬립각 추정 모듈에서 추정된 사이드 슬립각을 입력으로 하여 상기 추정된 사이드 슬립각에 따른 복원 제어 게인 값을 결정하는 사이드 슬립 제어 모듈; 상기 복원 제어 모듈에서 산출된 조향 복원 토크를 복원 제어 게인 값에 따라 보정하여 최종의 조향 복원 토크를 결정하는 보정부; 및 상기 어시스트 토크 결정 모듈에서 결정된 어시스트 토크를 상기 보정부에서 보정된 최종의 조향 복원 토크만큼 보상하여 조타 보조를 위한 최종의 어시스트 토크를 결정하는 토크 보상부를 포함하는 차량 조향 시스템의 제어 장치를 제공한다.
그리고, 본 발명의 다른 양태에 따르면, 차량에서 수집되는 운전자 조향 입력 정보와 차량 상태 정보에 기초하여 조타 보조를 위한 어시스트 토크를 결정하는 단계; 조향휠을 중립 위치로 복원 회전시키기 위한 조향 복원 토크를 산출하는 단계; 차량에서 수집되는 차량 상태 정보에 기초하여 사이드 슬립각을 추정하는 단계; 상기 추정된 사이드 슬립각에 따른 복원 제어 게인 값을 결정하는 단계; 상기 산출된 조향 복원 토크를 상기 결정된 복원 제어 게인 값에 따라 보정하여 최종의 조향 복원 토크를 결정하는 단계; 및 상기 결정된 어시스트 토크를 상기 보정된 최종의 조향 복원 토크만큼 보상하여 조타 보조를 위한 최종의 어시스트 토크를 결정하는 단계를 포함하는 차량 조향 시스템의 제어 방법을 제공한다.
이로써, 본 발명에 따른 차량 조향 시스템의 제어 장치 및 제어 방법에 의하면, 주행 중인 차량에서 사이드 슬립각의 추정 및 적절한 복원 제어를 통해 운전자 운전 입력에 대한 차량 거동의 일체감을 증대시키는 동시에 차량의 안정성을 향상시킬 수 있게 된다.
도 1과 도 2는 사이드 슬립각을 나타내는 도면이다.
도 3과 도 4는 사이드 슬립각에 따른 차량 상태를 설명하기 위한 도면이다.
도 5는 본 발명의 실시예에 따른 제어 장치의 구성을 나타내는 블록도이다.
도 6은 바이시클 모델을 나타낸 도면이다.
도 7은 본 발명의 실시예에 따른 차량 조향 시스템의 제어 장치에서 사이드 슬립각 추정 모듈의 일례를 도시한 구성도이다.
도 8은 본 발명의 실시예에 따른 차량 조향 시스템의 제어 장치에서 사이드 슬립각에 따른 복원 제어 게인 값이 설정된 튜닝 맵을 예시한 도면이다.
도 3과 도 4는 사이드 슬립각에 따른 차량 상태를 설명하기 위한 도면이다.
도 5는 본 발명의 실시예에 따른 제어 장치의 구성을 나타내는 블록도이다.
도 6은 바이시클 모델을 나타낸 도면이다.
도 7은 본 발명의 실시예에 따른 차량 조향 시스템의 제어 장치에서 사이드 슬립각 추정 모듈의 일례를 도시한 구성도이다.
도 8은 본 발명의 실시예에 따른 차량 조향 시스템의 제어 장치에서 사이드 슬립각에 따른 복원 제어 게인 값이 설정된 튜닝 맵을 예시한 도면이다.
이하에서는 첨부한 도면을 참조하여 본 발명의 실시예에 대해 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자가 용이하게 실시할 수 있도록 상세히 설명하기로 한다. 그러나, 본 발명은 여기서 설명되는 실시예에 한정되지 않고 다른 형태로 구체화될 수도 있다.
명세서 전체에서, 어떤 부분이 어떤 구성요소를 "포함"한다고 할 때, 이는 특별히 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있는 것을 의미한다.
본 발명은 주행 중인 차량에서 사이드 슬립각의 추정 및 적절한 복원 제어를 통해 운전자 운전 입력에 대한 차량 거동의 일체감을 증대시키는 동시에 차량의 안정성을 향상시킬 수 있는 차량 조향 시스템의 제어 장치 및 제어 방법을 제공하고자 하는 것이다.
본 발명에서는 차량 거동의 일체감과 주행 안정성을 향상시키기 위해 차량이 주행하는 동안 현재의 운전자 조향 입력 상태 및 차량 상태에 따른 사이드 슬립각을 추정하고, 상기 추정된 값을 기초로 차량의 사이드 슬립각을 제어하기 위한 사이드 슬립 제어가 수행된다.
본 발명에서 차량 거동의 일체감 및 주행 안정성 향상을 위한 사이드 슬립 제어의 제어 목표는 사이드 슬립각이 최소화되도록 하면서 사이드 슬립각의 값이 양의 값이 되도록 제어하는데에 있다.
실제 주행 중 차량의 사이드 슬립각을 조정하기 위해서는 조향각을 변경해야 하지만, 차량의 조향 시스템이 사이드 슬립각의 조정이 이루어지도록 차량의 조향각을 능동적으로 변경하는 액티브 시스템으로 동작한다면 운전자가 의도하지 않은 차량 조향이 나타날 수 있다.
따라서, 본 발명에서는 운전자와 차량에 직접적인 영향을 주는 각도 제어가 아닌 토크 제어를 통해 사이드 슬립 제어의 목표에 도달할 수 있도록 보조한다.
본 발명에서 토크 제어를 위해 복원 제어를 이용하며, 차량이 곡선 도로를 따라 선회 주행을 하고 있을 때, 도 3에 나타낸 바와 같이, 추정된 차량의 사이드 슬립각(β)이 양(+)의 값인 경우(β>0), 즉 차량의 헤딩 방향(D2)이 선회 궤적의 바깥쪽을 향하고 있는 경우, 복원 제어의 방향과 제어 목표의 방향은 서로 반대 방향이므로, 사이드 슬립각의 절대값이 큰 값일수록 복원 제어량을 축소한다.
반면, 도 4에 나타낸 바와 같이, 추정된 차량의 사이드 슬립각(β)이 음(-)의 값인 경우(β<0), 즉 차량의 헤딩 방향(D2)이 선회 궤적의 안쪽을 향하고 있는 경우, 복원 제어의 방향과 제어 목표의 방향이 같은 방향이므로, 사이드 슬립각의 절대값이 큰 값일수록 복원 제어량을 증대시킨다.
본 발명에서 사이드 슬립각(β)은 주행 중인 차량의 이동 방향에 대하여 차량의 미끌림 정도를 나타내는 각도로서, 도 3 및 도 4에 나타낸 바와 같이 차량의 속도 방향(D1)과 차량의 헤딩 방향(D2) 사이의 각도로 정의될 수 있다.
여기서, 차량의 속도는 차량의 종방향 속도(Vx)를 말하며, 도 3 및 도 4에서 차량의 속도 방향(D1)은 차량이 곡선 도로를 따라 이동하는 선회 주행을 할 때 선회 궤적의 접선 방향으로 정의될 수 있다.
이하에서는 본 발명의 실시예에 따른 조향 시스템의 제어 장치 및 제어 방법에 대해서 도면을 참조하여 좀더 상세히 설명하기로 한다.
도 5는 본 발명의 실시예에 따른 제어 장치의 구성을 나타내는 블록도이다.
본 발명에 따른 제어 장치 및 제어 방법은 차량의 전동식(또는 전자제어식) 조향 시스템(MDPS:Motor Driven Power Steering System, 또는 EPS:Electronic Power Steering system)에 적용될 수 있는 것이다.
구성을 살펴보면, 도시된 바와 같이, 본 발명의 실시예에 따른 조향 시스템의 제어 장치는, 어시스트 토크 결정 모듈(11), 복원 제어 모듈(12), 사이드 슬립각 추정 모듈(13), 사이드 슬립 제어 모듈(14), 그리고 보정부(15) 및 토크 보상부(16)를 포함할 수 있으며, 이러한 모듈들은 전동식(또는 전자제어식) 조향 시스템(MDPS 시스템 또는 EPS 시스템)의 제어기 내에 구비될 수 있다.
상기한 구성 중 어시스트 토크 결정 모듈(11)과 복원 제어 모듈(12)은 조향 시스템의 제어 장치에서 이미 알려진 구성으로서, 기 공지된 제어 장치의 어시스트 토크 결정 모듈 및 복원 제어 모듈과 비교하여 차이가 없다.
즉, 어시스트 토크 결정 모듈(11)은 차량에서 수집되는 운전자 조향 입력 정보와 차량 상태 정보에 기초하여 어시스트 토크, 즉 조타 보조를 위한 토크(조타 보조 토크)를 산출하는 구성부이다.
여기서, 운전자 조향 입력 정보와 차량 상태 정보는 차량에서 센서에 의해 검출되는 정보가 될 수 있다.
즉, 운전자가 조향휠을 조작함에 따른 운전 입력 정보, 즉 상기 운전자 조향 입력 정보는 조향각 센서의 신호와 토크 센서의 신호로부터 각각 취득되는 조향각과 조타토크를 포함하는 것이 될 수 있다.
또한, 차량 상태 정보는 차속을 포함하는 것이 될 수 있다.
이와 같이 어시스트 토크 결정 모듈(11)은 조향각과 조타토크 등의 운전자 조향 입력 정보와 차속 등의 차량 상태 정보로부터 조타 보조를 위한 어시스트 토크를 결정하게 된다.
그리고, 복원 제어 모듈(12)은 운전자가 조향휠을 조타한 후 조향휠을 원래의 중립 위치(온-센터 위치)로 복원 회전시키기 위한 모터 토크인 조향 복원 토크를 산출하는 구성부이다.
전동식(또는 전자식) 조향 시스템(MDPS 시스템 또는 EPS 시스템)에서는 차량의 조타 복원성, 즉 조향휠의 복원성을 향상시키기 위한 복원 제어 로직이 적용되고 있다.
이에 운전자가 차량을 주행하는 동안 선회(코너링)시 조향휠을 조타하였다가 선회 완료시(선회 구간 통과 완료시) 조향휠을 놓아주게 되면, 조향휠이 복원 제어 로직에 따라 산출된 조향 복원 토크에 의해 중립 위치를 향해 회전되는 복원 동작이 이루어진다.
본 발명의 실시예에 따른 제어 장치는 상기와 같은 복원 제어 로직을 수행하는 복원 제어 모듈(12)을 포함하며, 본 발명의 실시예에 따른 제어 장치에서 복원 제어 모듈(12)로는 조향 복원 토크를 산출할 수 있는 것이라면 기 공지된 구성 중 하나가 제한 없이 채택 가능하다.
예를 들면, 한국등록특허 제10-0795102호(2008.1.9.)에 개시된 바와 같이 조향각과 차속을 기초로 하여 조향 복원 토크를 산출하거나, 조향각과 조향각속도, 차속으로부터 조향 복원 토크를 산출하는 것이 알려져 있다.
또는 한국공개특허 제10-2018-0080401호(2018.7.12.)(또는 US 2018/0186399 A1)에 개시된 바와 같이 차속, 요레이트, 조타토크(컬럼 토크)로부터 조향 복원 토크를 산출하는 것이 알려져 있다.
다음으로, 사이드 슬립각 추정 모듈(13)은 사이드 슬립각(β)을 추정하는 구성부로서, 차량 상태 정보에 기초하여 사이드 슬립각(β)을 추정하도록 구성될 수 있다.
여기서, 상기 사이드 슬립각(β)을 추정하기 위한 차량 상태 정보는 센서에 의해 검출되는 정보로서, 차속(Vx)과 횡가속도(ay), 요레이트(ωy)를 포함하는 것이 될 수 있다.
이와 같이 사이드 슬립각 추정 모듈(13)은 센서에 의해 검출되는 차속(Vx), 차량 횡가속도(ay) 및 차량 요레이트(ωy)를 입력받아 사이드 슬립각(β)을 계산하도록 구비될 수 있다.
도 6은 참고 도면으로서 바이시클 모델을 나타낸 도면이고, 도 7은 본 발명에서 사이드 슬립각 추정 모듈(13)의 세부 구성을 예시한 도면이다.
도 6에서 R은 선회 반경을 나타내며, m은 차량 질량(vehicle mass)을 나타내고, Iz은 차량 관성 모멘트를 나타낸다.
또한, Ff는 전륜 횡력(front lateral force)을, Fr은 후륜 횡력(rear lateral force)을 나타내고, lf는 차량 무게 중심과 전륜축 간의 거리를 나타내며, lr은 차량 무게 중심과 후륜축 간의 거리를 나타낸다.
Vx는 차속(차량의 종방향 속도)을 나타내고, Vy는 차량의 횡방향 속도를 나타내며, δ는 휠 조향각을, β는 차량의 사이드 슬립각을, ωy는 차량 요레이트를 각각 나타낸다.
도 6에 따르면, 사이드 슬립각(β)은 차량의 종방향 속도(차속)인 Vx와 횡방향 속도인 Vy를 이용하여 아래의 식 (1)과 같이 나타낼 수 있다.

또한, 차속이 일정하다 가정하면, 차량의 횡가속도(ay)는 아래의 식 (2)와 같이 나타낼 수 있다.
결국, 사이드 슬립각(β)은 차속(Vx)과 횡가속도(ay), 요레이트(ωy)를 이용하여 아래의 식 (3)과 같이 나타낼 수 있다.

상기 식 (3)과 같이 사이드 슬립각(β)은 사이드 슬립각 추정 모듈(13)에서 차속(Vx)과 횡가속도(ay), 요레이트(ωy)로부터 계산될 수 있다.
이때, 사이드 슬립각 추정 모듈(13)에 적용될 수 있는 것으로서, 식 (3)을 이용하는 추정기들은 칼만 필터(Kalman filter), 루엔버거 옵저버(Luenberger observer), 컨트롤러 아웃풋 옵저버(controller output observer) 등의 다양한 방식으로 구성이 가능하다.
도 7은 컨트롤러 아웃풋 옵저버를 예를 든 것으로, 차속(Vx)과 횡가속도(ay), 요레이트(ωy)를 입력으로 하여 사이드 슬립각(β)을 산출하는 사이드 슬립각 추정 모듈(13)의 일례를 보여주고 있다.
한편, 사이드 슬립 제어 모듈(14)은 사이드 슬립각 추정 모듈(13)에서 산출 및 추정된 사이드 슬립각(β)을 입력받도록 구비되며, 사이드 슬립각 추정 모듈(13)에서 입력되는 사이드 슬립각 추정치(즉, 추정된 사이드 슬립각)로부터 그에 해당하는 복원 제어 게인을 설정 정보를 이용하여 결정한다.
여기서, 복원 제어 게인 값은 선행 시험 및 평과 과정에서 튜닝을 통해 결정된 값으로서, 상기 설정 정보는 복원 제어 게인 값을 사이드 슬립각(β)에 따른 값으로 튜닝하여 설정해놓은 튜닝 맵이 될 수 있다.
즉, 상기 튜닝 맵은 선행 시험 및 평가 과정을 통해 얻어진 데이터들을 이용하여 사이드 슬립각(β)에 따라 복원 제어 게인 값을 설정해놓은 맵으로서, 도 8은 사이드 슬립각(β)으로부터 복원 제어 게인 값을 결정하는데 이용될 수 있는 맵을 예시한 도면이다.
도 8은 사이드 슬립 제어 모듈(14)에서 사이드 슬립각 추정 모듈(13)에서의 추정값, 즉 추정된 사이드 슬립각(β)을 입력으로 하여 복원 제어 게인 값을 산출할 수 있는 튜닝 맵의 예를 보여주고 있다.
도 8을 참조하면, 맵에서 사이드 슬립각(β)이 0보다 작은 음(-)의 값일 경우, 복원 제어 게인 값은 1보다 큰 값으로 설정되며, 이를 통해 복원 제어량을 증대시킨다.
여기서, 복원 제어량을 증대시킨다는 의미는 복원 제어 모듈(12)에서 산출된 조향 복원 토크를 더 증대시킨다는 의미이며, 이를 위해 상기 맵에서 사이드 슬립각(β)이 0보다 작은 음(-)의 영역에서는 상기 산출된 조향 복원 토크에 곱해지는 복원 제어 게인 값이 1보다 큰 값으로 설정된다.
또한, 맵에서 사이드 슬립각(β)이 0보다 작은 음(-)의 영역에서는 사이드 슬립각의 절대값이 큰 값일수록 복원 제어 게인 값이 점차 큰 값이 되도록 설정된다.
반면, 맵에서 사이드 슬립각(β)이 0보다 큰 양(+)의 값일 경우, 복원 제어 게인 값은 1보다 작은 값으로 설정되며, 이를 통해 복원 제어량을 축소한다.
여기서, 복원 제어량을 축소한다는 의미는 복원 제어 모듈(12)에서 산출된 조향 복원 토크를 더 감소시킨다는 의미이며, 이를 위해 상기 맵에서 사이드 슬립각(β)이 0보다 큰 양(+)의 영역에서는 상기 산출된 조향 복원 토크에 곱해지는 복원 제어 게인 값이 1보다 작은 값으로 설정된다.
또한, 맵에서 사이드 슬립각(β)이 0보다 큰 양(+)의 영역에서는 사이드 슬립각의 절대값이 큰 값일수록 복원 제어 게인 값이 점차 작은 값이 되도록 설정된다.
또한, 맵에서 사이드 슬립각(β)이 0인 경우에는 복원 제어 게인 값이 1로 설정되며, 이는 복원 제어 모듈(12)에서 산출된 조향 복원 토크를 증가나 축소하지 않고 복원 제어를 위해 그대로 사용한다는 것을 의미한다.
다시 정리하면, 복원 제어 게인이 1보다 크면 복원 제어가 증대되는 것이고, 복원 제어 게인이 1보다 작으면 복원 제어가 축소되는 것이다.
또한, 사이드 슬립각(β)에 따른 복원 제어 게인의 튜닝에 있어서 복원 제어 게인의 값은 정해진 최대값(Max)을 넘지 않도록 설정된다.
상기와 같이 사이드 슬립각(β)에 따른 값으로 복원 제어 게인 값을 튜닝한 맵 등이 이용될 수 있으나, 튜닝을 하지 않고 하이퍼볼릭 탄젠트(hyperbolic tangent)(Tanh) 함수 등의 수식이 설정 정보로서 이용될 수도 있다.
한편, 보정부(15)에서는 복원 제어 모듈(12)에서 결정된 조향 복원 토크의 보정이 이루어지며, 이때 복원 제어 모듈(12)에서 결정된 조향 복원 토크에 상기 사이드 슬립 제어 모듈(14)에서 결정된 복원 제어 게인 값이 곱해짐으로써 조향 복원 토크의 보정이 이루어지도록 한다.
즉, 보정부(15)에서 복원 제어 모듈(12)의 조향 복원 토크에 상기 복원 제어 게인 값이 곱해짐으로써 보정된 조향 복원 토크 값이 구해지는 것이며, 이렇게 구해진 보정된 조향 복원 토크 값이 최종의 조향 복원 토크 값이 된다.
이어 토크 보상부(16)에서는 어시스트 토크 결정 모듈(11)에서 결정된 어시스트 토크를 상기 보정부(15)에서 구해진 최종의 조향 복원 토크만큼 보상하여 조향 모터가 출력해야 할 최종의 어시스트 토크를 산출하게 된다.
이때, 토크 보상부(16)는 어시스트 토크 결정 모듈(11)에서 결정된 어시스트 토크에 상기 보정된 최종의 조향 복원 토크를 합산하는 방식으로 보상하여 최종의 어시스트 토크를 산출한다.
상기와 같이 최종의 어시스트 토크가 산출되고 나면, 산출된 최종의 어시스트 토크를 기초로 조향 모터의 구동을 제어함으로써 조타 보조가 이루어지게 된다.
이상으로 본 발명의 실시예에 대하여 상세하게 설명하였지만, 본 발명의 권리범위가 이에 한정되는 것은 아니며, 다음의 특허청구범위에서 정의하고 있는 본 발명의 기본 개념을 이용한 당 업자의 여러 변형 및 개량 형태 또한 본 발명의 권리범위에 포함된다.
11 : 어시스트 토크 결정 모듈
12 : 복원 제어 모듈
13 : 사이드 슬립각 추정 모듈
14 : 사이드 슬립 제어 모듈
15 : 보정부
16 : 토크 보상부
12 : 복원 제어 모듈
13 : 사이드 슬립각 추정 모듈
14 : 사이드 슬립 제어 모듈
15 : 보정부
16 : 토크 보상부
Claims (16)
- 차량에서 수집되는 운전자 조향 입력 정보와 차량 상태 정보에 기초하여 조타 보조를 위한 어시스트 토크를 결정하는 어시스트 토크 결정 모듈;
조향휠을 중립 위치로 복원 회전시키기 위한 조향 복원 토크를 산출하는 복원 제어 모듈;
차량에서 수집되는 차량 상태 정보에 기초하여 사이드 슬립각을 추정하는 사이드 슬립각 추정 모듈;
상기 사이드 슬립각 추정 모듈에서 추정된 사이드 슬립각을 입력으로 하여 상기 추정된 사이드 슬립각에 따른 복원 제어 게인 값을 결정하는 사이드 슬립 제어 모듈;
상기 복원 제어 모듈에서 산출된 조향 복원 토크를 복원 제어 게인 값에 따라 보정하여 최종의 조향 복원 토크를 결정하는 보정부; 및
상기 어시스트 토크 결정 모듈에서 결정된 어시스트 토크를 상기 보정부에서 보정된 최종의 조향 복원 토크만큼 보상하여 조타 보조를 위한 최종의 어시스트 토크를 결정하는 토크 보상부를 포함하는 차량 조향 시스템의 제어 장치.
- 청구항 1에 있어서,
상기 사이드 슬립각 추정 모듈은 상기 차량 상태 정보로서 차속과 차량 횡가속도, 차량 요레이트로부터 사이드 슬립각을 산출하는 것을 특징으로 하는 차량 조향 시스템의 제어 장치.
- 청구항 1에 있어서,
상기 사이드 슬립 제어 모듈은 사이드 슬립각에 따른 복원 제어 게인 값이 설정된 맵을 이용하여 상기 사이드 슬립각 추정 모듈에서 추정된 사이드 슬립각으로부터 복원 제어 게인 값을 결정하도록 구비되는 것을 특징으로 하는 차량 조향 시스템의 제어 장치.
- 청구항 3에 있어서,
상기 맵에서 사이드 슬립각이 0보다 작은 음(-)의 값일 경우 복원 제어 게인 값은 1보다 큰 값으로 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 장치.
- 청구항 4에 있어서,
상기 맵에서 사이드 슬립각이 0보다 작은 음(-)의 영역에서 사이드 슬립각의 절대값이 큰 값일수록 복원 제어 게인 값이 점차 큰 값이 되도록 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 장치.
- 청구항 3에 있어서,
상기 맵에서 사이드 슬립각이 0보다 큰 양(+)의 값일 경우 복원 제어 게인 값은 1보다 작은 값으로 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 장치.
- 청구항 6에 있어서,
상기 맵에서 사이드 슬립각이 0보다 큰 양(+)의 영역에서 사이드 슬립각의 절대값이 큰 값일수록 복원 제어 게인 값이 점차 작은 값이 되도록 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 장치.
- 청구항 3에 있어서,
상기 맵에서 사이드 슬립각이 0인 경우 복원 제어 게인 값이 1로 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 장치.
- 차량에서 수집되는 운전자 조향 입력 정보와 차량 상태 정보에 기초하여 조타 보조를 위한 어시스트 토크를 결정하는 단계;
조향휠을 중립 위치로 복원 회전시키기 위한 조향 복원 토크를 산출하는 단계;
차량에서 수집되는 차량 상태 정보에 기초하여 사이드 슬립각을 추정하는 단계;
상기 추정된 사이드 슬립각에 따른 복원 제어 게인 값을 결정하는 단계;
상기 산출된 조향 복원 토크를 상기 결정된 복원 제어 게인 값에 따라 보정하여 최종의 조향 복원 토크를 결정하는 단계; 및
상기 결정된 어시스트 토크를 상기 보정된 최종의 조향 복원 토크만큼 보상하여 조타 보조를 위한 최종의 어시스트 토크를 결정하는 단계를 포함하는 차량 조향 시스템의 제어 방법.
- 청구항 9에 있어서,
상기 사이드 슬립각을 추정하는 단계에서 차량 상태 정보로서 차속과 차량 횡가속도, 차량 요레이트로부터 사이드 슬립각 산출하는 것을 특징으로 하는 차량 조향 시스템의 제어 방법.
- 청구항 9에 있어서,
상기 복원 제어 게인 값을 결정하는 단계에서 사이드 슬립각에 따른 복원 제어 게인 값이 설정된 맵을 이용하여 상기 추정된 사이드 슬립각에 해당하는 복원 제어 게인 값을 결정하는 것을 특징으로 하는 차량 조향 시스템의 제어 방법.
- 청구항 11에 있어서,
상기 맵에서 사이드 슬립각이 0보다 작은 음(-)의 값일 경우 복원 제어 게인 값은 1보다 큰 값으로 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 방법.
- 청구항 12에 있어서,
상기 맵에서 사이드 슬립각이 0보다 작은 음(-)의 영역에서 사이드 슬립각의 절대값이 큰 값일수록 복원 제어 게인 값이 점차 큰 값이 되도록 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 방법.
- 청구항 11에 있어서,
상기 맵에서 사이드 슬립각이 0보다 큰 양(+)의 값일 경우 복원 제어 게인 값은 1보다 작은 값으로 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 방법.
- 청구항 14에 있어서,
상기 맵에서 사이드 슬립각이 0보다 큰 양(+)의 영역에서 사이드 슬립각의 절대값이 큰 값일수록 복원 제어 게인 값이 점차 작은 값이 되도록 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 방법.
- 청구항 11에 있어서,
상기 맵에서 사이드 슬립각이 0인 경우 복원 제어 게인 값이 1로 설정되는 것을 특징으로 하는 차량 조향 시스템의 제어 방법.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180146972A KR102621533B1 (ko) | 2018-11-26 | 2018-11-26 | 차량 조향 시스템의 제어 장치 및 제어 방법 |
| EP19189088.8A EP3656648B1 (en) | 2018-11-26 | 2019-07-30 | Apparatus and method for controlling steering system of vehicle |
| US16/527,401 US11285993B2 (en) | 2018-11-26 | 2019-07-31 | Apparatus and method for controlling steering system of vehicle |
| CN201910728934.XA CN111216785B (zh) | 2018-11-26 | 2019-08-08 | 用于控制车辆的转向系统的装置和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180146972A KR102621533B1 (ko) | 2018-11-26 | 2018-11-26 | 차량 조향 시스템의 제어 장치 및 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200062409A true KR20200062409A (ko) | 2020-06-04 |
| KR102621533B1 KR102621533B1 (ko) | 2024-01-05 |
Family
ID=67513372
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180146972A KR102621533B1 (ko) | 2018-11-26 | 2018-11-26 | 차량 조향 시스템의 제어 장치 및 제어 방법 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11285993B2 (ko) |
| EP (1) | EP3656648B1 (ko) |
| KR (1) | KR102621533B1 (ko) |
| CN (1) | CN111216785B (ko) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210139028A1 (en) * | 2019-11-13 | 2021-05-13 | Sf Motors, Inc. | Fuzzy logic based and machine learning enhanced vehicle dynamics determination |
| JP7573335B2 (ja) | 2021-03-12 | 2024-10-25 | 日産自動車株式会社 | 走行支援方法及び走行支援装置 |
| CN117657283B (zh) * | 2022-08-22 | 2024-10-11 | 比亚迪股份有限公司 | 电动助力转向的主动回正控制方法、车辆和存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06298112A (ja) * | 1993-04-15 | 1994-10-25 | Nippondenso Co Ltd | 車両の後輪操舵制御装置 |
| US6415215B1 (en) * | 2000-02-23 | 2002-07-02 | Koyo Seiko Co., Ltd. | Vehicle attitude control apparatus |
| JP2003312512A (ja) * | 2002-04-23 | 2003-11-06 | Toyota Central Res & Dev Lab Inc | セルフアライニングトルク推定装置及び横グリップ度推定装置 |
| US20070173997A1 (en) * | 2006-01-23 | 2007-07-26 | Nissan Motor Co., Ltd. | Sideslip angle estimation apparatus and method and automotive vehicle incorporating the same |
| KR20120097024A (ko) * | 2011-02-24 | 2012-09-03 | 남양공업주식회사 | 자동차의 동역학적 특성을 반영한 전동식 조향장치의 제어방법 |
| US20170210414A1 (en) * | 2016-01-26 | 2017-07-27 | Fuji Jukogyo Kabushiki Kaisha | Control unit for vehicle and control method for vehicle |
| KR20180099215A (ko) * | 2017-02-28 | 2018-09-05 | 현대자동차주식회사 | 차량의 위치 추정 장치 및 방법과 이를 이용한 차량 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5919241A (en) * | 1996-12-13 | 1999-07-06 | General Motors Corporation | Vehicle having electric power steering with active damping |
| JP3882894B2 (ja) * | 2001-11-19 | 2007-02-21 | 三菱自動車工業株式会社 | 操舵反力制御装置 |
| JP3868848B2 (ja) * | 2002-05-23 | 2007-01-17 | 三菱電機株式会社 | 車両状態検出装置 |
| KR100795102B1 (ko) | 2002-06-21 | 2008-01-17 | 주식회사 만도 | 전자제어 파워 스티어링 시스템의 복원제어장치 |
| JP4202872B2 (ja) * | 2003-09-12 | 2008-12-24 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP4379261B2 (ja) * | 2004-08-30 | 2009-12-09 | 日産自動車株式会社 | 車両用操舵装置 |
| DE102006019790A1 (de) * | 2006-04-28 | 2007-10-31 | Zf Lenksysteme Gmbh | Verfahren zur Lenkungsregelung |
| EP1880921A3 (en) * | 2006-07-19 | 2009-07-15 | Nsk Ltd | Controller for electric power steering apparatus |
| JP5141059B2 (ja) * | 2007-03-23 | 2013-02-13 | 日本精工株式会社 | 電動パワーステアリング装置の制御装置 |
| KR101218884B1 (ko) * | 2007-04-17 | 2013-01-07 | 닛산 지도우샤 가부시키가이샤 | 차륜 접지면 마찰 상태 추정을 위한 장치와 방법 |
| JP5272905B2 (ja) * | 2008-06-10 | 2013-08-28 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP5429142B2 (ja) * | 2010-11-18 | 2014-02-26 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP2014193691A (ja) * | 2013-03-29 | 2014-10-09 | Hitachi Automotive Systems Ltd | 車両の運動制御装置 |
| US9896122B2 (en) * | 2013-04-08 | 2018-02-20 | Mitsubishi Electric Corporation | Steering control device, and steering control method |
| JP6260818B2 (ja) * | 2014-02-18 | 2018-01-17 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| KR101639479B1 (ko) * | 2014-10-13 | 2016-07-13 | 주식회사 만도 | 전동식 조향 제어 방법 및 그 장치 |
| FR3037024B1 (fr) * | 2015-06-08 | 2018-12-07 | Jtekt Europe | Utilisation de l’assistance de direction pour compenser les effets negatifs induits par un differentiel a glissement limite |
| JP6109894B2 (ja) * | 2015-08-27 | 2017-04-05 | 富士重工業株式会社 | 車両制御装置および車両制御方法 |
| KR102557830B1 (ko) | 2017-01-02 | 2023-07-24 | 현대모비스 주식회사 | 전동식 동력 조향장치의 조향복원 제어장치 및 그 방법 |
| US11214301B2 (en) * | 2017-01-20 | 2022-01-04 | Mitsubishi Electric Corporation | Automatic steering control apparatus and automatic steering control method |
| JP6928512B2 (ja) * | 2017-08-30 | 2021-09-01 | 日立Astemo株式会社 | 運転支援装置、運転支援方法および運転支援システム |
| JP2019131013A (ja) * | 2018-01-30 | 2019-08-08 | 株式会社ジェイテクト | 操舵制御装置 |
-
2018
- 2018-11-26 KR KR1020180146972A patent/KR102621533B1/ko active IP Right Grant
-
2019
- 2019-07-30 EP EP19189088.8A patent/EP3656648B1/en active Active
- 2019-07-31 US US16/527,401 patent/US11285993B2/en active Active
- 2019-08-08 CN CN201910728934.XA patent/CN111216785B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06298112A (ja) * | 1993-04-15 | 1994-10-25 | Nippondenso Co Ltd | 車両の後輪操舵制御装置 |
| US6415215B1 (en) * | 2000-02-23 | 2002-07-02 | Koyo Seiko Co., Ltd. | Vehicle attitude control apparatus |
| JP2003312512A (ja) * | 2002-04-23 | 2003-11-06 | Toyota Central Res & Dev Lab Inc | セルフアライニングトルク推定装置及び横グリップ度推定装置 |
| US20070173997A1 (en) * | 2006-01-23 | 2007-07-26 | Nissan Motor Co., Ltd. | Sideslip angle estimation apparatus and method and automotive vehicle incorporating the same |
| KR20120097024A (ko) * | 2011-02-24 | 2012-09-03 | 남양공업주식회사 | 자동차의 동역학적 특성을 반영한 전동식 조향장치의 제어방법 |
| US20170210414A1 (en) * | 2016-01-26 | 2017-07-27 | Fuji Jukogyo Kabushiki Kaisha | Control unit for vehicle and control method for vehicle |
| KR20180099215A (ko) * | 2017-02-28 | 2018-09-05 | 현대자동차주식회사 | 차량의 위치 추정 장치 및 방법과 이를 이용한 차량 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3656648B1 (en) | 2021-08-25 |
| US11285993B2 (en) | 2022-03-29 |
| EP3656648A1 (en) | 2020-05-27 |
| US20200164914A1 (en) | 2020-05-28 |
| KR102621533B1 (ko) | 2024-01-05 |
| CN111216785A (zh) | 2020-06-02 |
| CN111216785B (zh) | 2023-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10649454B2 (en) | Autonomous vehicle | |
| JP6638012B2 (ja) | 車両の車線逸脱防止制御装置 | |
| JP5286982B2 (ja) | 車両用操舵制御装置及び方法 | |
| CN107914767B (zh) | 转向操纵辅助装置 | |
| US9669866B2 (en) | Steering intention determination device, vehicle control device, steering assist device, and steering assist system | |
| US7957867B2 (en) | Steering system of vehicle | |
| US8788147B2 (en) | Method for determining a toothed rack force for a steering device in a vehicle | |
| JP5365084B2 (ja) | 車両用操舵制御装置及び車両用操舵制御方法 | |
| JP5233624B2 (ja) | 車両用操舵制御装置および方法 | |
| US7740102B2 (en) | Steering control device for vehicle | |
| US11718341B2 (en) | Vehicle driver assistance system | |
| JP5206170B2 (ja) | 車両用操舵制御装置及び方法 | |
| JP4696671B2 (ja) | 車両制御装置 | |
| US20160046321A1 (en) | Vehicle steering control device | |
| KR102621533B1 (ko) | 차량 조향 시스템의 제어 장치 및 제어 방법 | |
| JPH11198844A (ja) | 操舵力制御装置 | |
| JP2018122731A (ja) | 車両の操舵支援装置 | |
| JP5386873B2 (ja) | 車両用操舵装置及び車両用操舵方法 | |
| JP5380861B2 (ja) | 車線維持支援装置及び車線維持支援方法 | |
| JP5380860B2 (ja) | 車線維持支援装置及び車線維持支援方法 | |
| KR101992338B1 (ko) | 스티어 바이 와이어 시스템의 차량 쏠림 보상 장치 및 방법 | |
| JP6311589B2 (ja) | パワーステアリング制御装置 | |
| JP2940369B2 (ja) | 検出ヨーレイト補正装置 | |
| JP3760608B2 (ja) | 車両の自動操舵装置 | |
| JP2016107764A (ja) | パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |