以下にて、本発明を実施するための形態について、図面を参照して説明する。尚、以下に記載されている構成部品の寸法、材質、形状、その相対配置などは、特に特定的な記載がない限りは、この発明の範囲をそれらのみに限定する趣旨のものではない。
<第1の実施形態>
図1は、本実施形態における画像形成装置1の概略断面図である。図1に示すように、本実施形態における画像形成装置1は、イエロー(Y)、マゼンタ(M)、シアン(C)及びブラック(Bk)の色毎にトナー像を形成する4基の画像形成部10Y、10M、10C、10Bkを備えるタンデム型のカラーレーザビームプリンタである。
また、本実施形態における画像形成装置1は、装置本体の上部にリーダ部306を備える。リーダ部306は、原稿を自動的に搬送する原稿搬送装置301と、搬送された原稿の画像を読み取る原稿読取装置305と、原稿が排紙される原稿排紙トレイ302と、を備える。
原稿搬送装置301は、原稿がセットされる原稿給紙トレイ300を備える。原稿搬送装置301は、原稿給紙トレイ300に載置された原稿をガラス303上の原稿読取位置へ1枚ずつ搬送する。ガラス303上に搬送された原稿は、原稿読取装置305の内部に設けられるCCDやCIS等の不図示のスキャナによって読み取られる。その後、原稿搬送装置301は、さらに原稿を搬送し、原稿排紙トレイ302上に原稿を排出する。
原稿搬送装置301は、原稿読取装置305に対して開閉可能となっており、操作者は原稿搬送装置301を開くことで、ガラス303上に原稿を載置することが可能となっている。
そして、スキャナは、原稿搬送装置301によってガラス303上に搬送された原稿やガラス303上に載置された原稿等に光源から光を照射し、原稿からの反射光を受光センサによって受光した光を電気信号に変換する。ここで変換した赤(r)、緑(g)、青(b)成分の電気信号を、後述するCPU601等の制御部に出力する。
また、図1に示すように、本実施形態における画像形成装置1は、操作部304を備える。操作部304はユーザやサービスマン等の作業者に対して、印刷条件の設定情報を表示するディスプレイを有する。
ディスプレイは、作業者が指などで接触することにより操作されるソフトキーを表示することができる。これにより、作業者は、片面印刷や両面印刷などの指示情報を操作パネルから入力することができる。
操作部304は、画像形成動作を開始する際に押下するスタートキーや、画像形成動作を中断する際に押下するストップキーを有する。テンキーは画像形成枚数の設定などを行う際に押下するキーである。本実施形態の画像形成装置においてスタートキー、ストップキー、およびテンキーはハードキーとして操作部304に設けられているが、これらをソフトキーとしてディスプレイに表示しても良い。操作部304で入力された各種データは、CPU601を通じてRAM603に記憶される。
画像形成装置1は、各画像形成部10Y、10M、10C、10Bkにて作像されたトナー像が転写される中間転写ベルト20を備えている。そして、中間転写ベルト20にそれぞれの画像形成部10から重ねられたトナー像を記録媒体であるシートPに転写してシート上(記録媒体上)にカラー画像を形成するように構成されている。尚、画像形成部10Y、10M、10C、10Bkは、それぞれで用いるトナーの色が異なる以外は略同一に構成されている。以下では画像形成部10として画像形成部10Yを例に説明し、画像形成部10M、10C、10Bkについて重複する説明を省略する。ここで、本発明において、記録媒体としては、一般的な印刷に用いられる紙だけでなく、布、プラスチック、フィルム等も広く包含する。
画像形成部10は、感光体100と、感光体100を一様な背景電位に帯電させる帯電ローラ12と、後述する光走査装置40によって感光体100上に形成される静電潜像を現像してトナー像を形成する現像部としての現像器13と、形成されたトナー像を中間転写ベルト20へ転写する一次転写ローラ15が設けられている。ここで、一次転写ローラ15は、中間転写ベルト20を介して感光体100との間に一次転写部を形成しており、所定の転写電圧が印加されることにより感光体100上に形成されたトナー像を中間転写ベルト20に転写する。
中間転写ベルト20は、無端状に形成され、第1ベルト搬送ローラ21及び第2ベルト搬送ローラ22に架け回されており、矢印H方向に回転動作しながら各画像形成部10で形成されたトナー像が転写される。ここで、4基の画像形成部10Y、10M、10C、10Bkは、中間転写ベルト20の鉛直方向下側に並列的に配置されており、各色の画像情報に応じて形成したトナー像を中間転写ベルト20に転写する。画像形成部10による各色の画像形成プロセスは、中間転写ベルト20上に一次転写された上流側のトナー像に重ね合わせるタイミングで行われる。その結果、中間転写ベルト20上には、4色のトナー像が重ね合わせられるように形成される。
また、第1ベルト搬送ローラ21は、中間転写ベルト20を挟んで二次転写ローラ65と互いに圧接されており、中間転写ベルト20を介して二次転写ローラ65との間にシートP上にトナー像を転写する二次転写部を形成している。シートPは、二次転写部に挿通されることで、中間転写ベルト20からトナー像が転写される。尚、中間転写ベルト20の表面に残った転写残トナーは、不図示のクリーニング装置によって回収される。
ここで、各色の画像形成部10は、中間転写ベルト20の回転方向(矢印H方向)において、二次転写部に対して上流側からイエローのトナー像を形成する画像形成部10Y、マゼンタのトナー像を形成する画像形成部10M、シアンのトナー像を形成する画像形成部10C、ブラックのトナー像を形成する画像形成部1Bkが順に配置されている。
また、各画像形成部10の鉛直方向下方には、各感光体100にレーザ光を走査して、形成する画像情報に応じた静電潜像を各感光体100上に形成する光走査手段としての光走査装置40が設けられている。ここで、画像形成部10及び光走査装置40は、画像形成手段の一例である。
光走査装置40は、各色の画像情報に応じて変調されたレーザ光を出射する不図示の4基の半導体レーザを備えている。また、光走査装置40は、モータユニット41と、モータユニット41によって高速回転されることで、各半導体レーザから出射された各レーザ光を各感光体100の回転軸方向に沿って走査させるように偏向させる回転多面鏡43を備えている。回転多面鏡43によって偏向された各レーザ光は、光走査装置40の内部側に配置された光学部材に案内され、光走査装置40の上部に設けられた各開口部を覆う透過部材42a〜dを介して光走査装置40の内部側から外部側へと出射され、各感光体100を露光する。ここで、透過部材42a〜dは、透明窓の一例である。
一方、シートPは、画像形成装置1の下部に配置される給送カセット2に収容されている。そして、シートPは、ピックアップローラ24によって、給送ローラ25とリタードローラ26によって形成される分離ニップ部へと給送される。ここで、リタードローラ26は、ピックアップローラ24によってシートPが複数枚給送された場合に逆回転するように駆動が伝達されており、シートPを1枚ずつ下流へ搬送することでシートPの重送を防止している。給送ローラ25及びリタードローラ26によって1枚ずつ搬送されたシートPは、画像形成装置1の右側面に沿って略垂直に伸びる搬送路27に搬送される。
そして、シートPは、搬送路27を通って画像形成装置1の鉛直方向下側から上側へと搬送され、レジストレーションローラ29に搬送される。レジストレーションローラ29は、搬送されるシートPを一旦停止させ、シートの斜行を矯正する。その後、レジストレーションローラ29は、中間転写ベルト20上に形成されたトナー像が二次転写部へ搬送されるタイミングに合わせてシートPを二次転写部へ搬送する。その後、二次転写部においてトナー像が転写されたシートPは、定着器3へと搬送され、定着器3によって加熱加圧されることでシートP上にトナー像が定着される。そして、トナー像が定着されたシートPは、排出ローラ28によって画像形成装置1の外側であって画像形成装置1の本体上部に設けられる排出トレイへと排出される。
このように、画像形成装置1の本体内部において、光走査装置40の上方に画像形成部10が設けられる構成であると、画像形成動作に伴って、光走査装置40の上部に設けられる透過部材42a〜d上にトナーや紙粉や埃等の異物が落下してくる場合がある。この場合、透過部材42a〜dを介して感光体100へ出射されるレーザ光が、異物によって遮られることになる。従って、異物によって光学特性が変化することで画像の品質が低下してしまう場合があった。
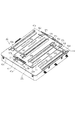
そこで、本実施形態は、光走査装置40に、透過部材42a〜dを清掃するための清掃機構51を備えている。以下では、光走査装置40と、光走査装置40に設けられる清掃機構51について、詳しく説明をする。図2は、光走査装置40の全体を示す斜視図であり、図3は、光走査装置40の上面図である。
図2及び図3に示すように、光走査装置40は、上述したモータユニット41や回転多面鏡43を内部側に収容する収容部40aと、収容部40aに取り付けられ、収容部40aの上面を覆うカバー部40bとを有している。ここで、収容部40aとカバー部40bとによって光走査装置40の筐体を構成している。カバー部40bには、各色の感光体100に対応してレーザ光が通過する開口部が4つ設けられており、各開口部は、対応する感光体100の回転軸線方向に長尺な矩形状であって、それぞれが長手方向に互いに並行に延びるように形成されている。そして、各開口部は、それぞれが長尺な矩形状に形成される透過部材42a〜dによってそれぞれ閉塞されている。透過部材42a〜dは、開口部と同様に4つ設けられており、それぞれが長手方向に互いに並行に延びるように、カバー部40bに取り付けられている。尚、透過部材42a〜dの長手方向は、光走査装置40から出射されるレーザ光の走査方向と略等しくなっている。また、本実施形態では、透過部材42a〜dの長手方向は、各感光体100の回転軸線方向と略等しくなっている。
ここで、透過部材42a〜dは、光走査装置40の内部へトナーや埃、紙粉等の異物が侵入することを防ぐために設けられており、異物が半導体レーザやミラー、回転多面鏡43等に付着することによる画像品質の低下を防止している。透過部材42a〜dは、例えばガラス等の透明な部材で形成されており、収容部40a内の半導体レーザによって発せられるレーザ光を、感光体100へ出射可能となっている。本実施形態では、透過部材42a〜dの大きさを開口部の開口よりも大きく設定し、透過部材42a〜dが各開口部をオーバーラップして覆うように構成されている。そして、透過部材42a〜dの開口部に対してオーバーラップしている部分を接着することで、透過部材42a〜dをカバー部40bに固定している。
このように、光走査装置40は、カバー部40b及び透過部材42a〜dによって覆われることで、トナーや紙粉、埃等の異物が光走査装置40の内部へ入り込まないような構成となっている。また、開口部よりも大きい透過部材42a〜dをカバー部40b上に接着固定することで、光走査装置40の上方から落下するトナーや紙粉、埃等の異物が、透過部材42a〜dと各開口部の隙間から光走査装置40の内部へ入り込むことを防止している。
そして、本実施形態では、上方から光走査装置40の上面(透過部材42a〜dの上面)へ落下する異物を清掃する清掃処理を行う清掃機構51を備えている。ここで、透過部材42a〜dの上面とは、光走査装置40に対して外側の面であり、透過部材42a〜dを通過するレーザ光が出射する側の面である。
清掃機構51は、光走査装置40のカバー部40b上であって、画像形成部10と対向する面側に取り付けられている。清掃機構51は、それぞれが透過部材42a〜dの上面(光走査装置40の外部側の面)を清掃するための清掃部材53a〜dと、清掃部材53a〜dを保持して透過部材42a〜d上を移動させる第1清掃ホルダ511と第2清掃ホルダ512を有している。
第1清掃ホルダ511及び第2清掃ホルダ512は、それぞれが隣り合う2つの透過部材42に跨って、透過部材42が延びる方向と直交する方向に延在すると共に、それぞれが清掃部材53を2つずつ有している。ここで、第1清掃ホルダ511及び第2清掃ホルダ512が有する清掃部材53は、透過部材42に対応する数だけ設けられている。
つまり、第1清掃ホルダ511は、透過部材42aと42bとに跨るように配置され、透過部材42aの上面を清掃する清掃部材53aと、透過部材42bの上面を清掃する清掃部材53bとを有している。また、第2清掃ホルダ512は、透過部材42cと42dとに跨るように配置され、透過部材42cの上面を清掃する清掃部材53bと、透過部材42dの上面を清掃する清掃部材53dとを有している。
清掃部材53a〜dは、例えばシリコンゴムや、不織布等で構成され、第1清掃ホルダ511及び第2清掃ホルダ512の移動に伴って透過部材42の上面に接触して移動することで、透過部材42上の異物を除去することが可能であり、清掃部材42上を清掃可能となっている。
第1清掃ホルダ511は、中央部分がワイヤ54に連結されており、ワイヤ54を中心にして両端側にそれぞれ清掃部材53a,53bを保持する構成となっている。また、第2清掃ホルダ512は、中央部がワイヤ54に連結されており、ワイヤ54を中心にして両端側にそれぞれ清掃部材53c,53dを保持する構成となっている。従って、ワイヤ54は、透過部材42a,42bの間と、透過部材42c,42dの間とを通過するように張設されている。
また、ワイヤ54は、カバー部40bに回転可能に保持されている4つの張設用滑車57a〜d、テンション調整用滑車58及び巻取ドラム59によって、カバー部40b上に環状に張設されている。そして、ワイヤ54は、装置の組み立て時に巻取ドラム59に所定回数巻き取られることで長さの調整がなされた状態で、張設用滑車57a〜dに張架されている。このとき、4つの張設用滑車57a〜dは、上述したように、ワイヤ54が透過部材42a,42bの間と、透過部材42c,42dの間とを通過するように配置されている。
ワイヤ54は、張設用滑車57aと57dとの間に設けられるテンション調整用滑車58によって張力が調整されているため、各張設用滑車57、テンション調整用滑車58及び巻取ドラム59の間で弛まずに張った状態で配置されている。これにより、ワイヤ54を張設することによって、ワイヤ54を滑らかに環状走行させることができる。
本実施形態では、テンション調整用滑車58を、張設用滑車57aと57dとの間に設けた構成としたが、張設用滑車57a〜dに張架されたワイヤ57の張力を調整できる位置であれば、この位置に限らなくてもよい。
このように、本実施形態では、第1清掃ホルダ511に清掃部材53a,bを設け、第2清掃ホルダ512に清掃部材53c,dを設ける構成としている。これに対し、1つの清掃ホルダに1つの清掃部材を保持させる場合は、透過部材の数だけ清掃ホルダを有する必要があり、清掃ホルダを張設するワイヤの長さが長くなる。従って、本実施形態では、1つの清掃ホルダに1つの清掃部材を保持させる構成と比較して、清掃ホルダの数を低減することができると共に、ワイヤ54の長さを短くすることができ、より簡単な構成で透過部材42a〜d上面の清掃を行うことができる。
また、巻取ドラム59は、駆動部としての巻取モータ55の駆動によって回転可能に構成されている。
ここで、巻取モータ55は正逆回転可能に構成されている。本実施形態では、巻取モータ55の正回転をCW方向(Clock Wise)とし、逆回転をCCW方向(Counter Clock Wise)とする。
従って、ワイヤ54は、巻取モータ55のCW方向またはCCW方向への回転によって巻取ドラム59が回転することで、巻取ドラム59に巻き取り及び引き出しされる構成になっている。このように、巻取ドラム59によって巻き取り及び引き出しされることで、ワイヤ54が各張設用滑車57に張架された状態でカバー部40b上を環状に走行可能となっている。
そのため、ワイヤ54に連結されている第1清掃ホルダ511及び第2清掃ホルダ512は、ワイヤ54の走行に伴って、矢印D1,D2方向(透過部材42の長手方向)に移動可能となっている。本実施形態では、巻取モータ55がCCW方向へ回転することで第1清掃ホルダ511及び第2清掃ホルダ512が矢印D1方向へ移動する。また、巻取モータ55がCW方向へ回転することで、第1清掃ホルダ511及び第2清掃ホルダ512がD2方向へ移動する。
このとき、ワイヤ54が環状に張設されているため、ワイヤ54の移動に伴って、第1清掃ホルダ511と第2清掃ホルダ512とが、透過部材42a〜dの長手方向においてそれぞれが直線的に反対方向に移動する構成となっている。
ここで、巻取モータ55及び巻取ドラム59は、カバー部40bの上面に対して凹むように設けられた凹部60内に設けられている。これによって、光走査装置40の高さ方向のサイズを小さくすることが可能となっている。尚、この凹部60は、光走査装置40の内部とは連通しておらず、この凹部60からも異物が光走査装置40の内部へ入り込まないように設けられている。
また、カバー部40bには、第1清掃ホルダ511の、透過部材42a,bの長手方向(感光体100の回転軸線方向)への移動を規制する第1ストッパ56aが設けられている。また、カバー部40bには、第2清掃ホルダ512の、透過部材42c,dの長手方向(感光体100の回転軸線方向)への移動を規制する第2ストッパ56bが設けられている。ここで、第1ストッパ56a及び第2ストッパ56bは、当接部材の一例である。
第1ストッパ56a及び第2ストッパ56bは、透過部材42a〜dの長手方向における一端側に設けられている。従って、第1清掃ホルダ511及び第2清掃ホルダ512が矢印D1方向に移動していくと、第1清掃ホルダ511が矢印D1方向における透過部材42a,bの端部に到達し、第1ストッパ56aに当接することになる。
これにより、第1清掃ホルダ511の矢印D1方向への移動が第1ストッパ56aによって規制されるため、ワイヤ54を走行させるために巻取ドラム59を回転させている巻取モータ55に作用する負荷が大きくなる。この負荷を後述する電流検出部を用いて検出することによって、第1清掃ホルダ511が第1ストッパ56aに到達したことが検出される。このとき、第2清掃ホルダ512は、透過部材42の長手方向において前記第1清掃ホルダ511の反対側に位置している。
尚、本実施形態における第1清掃ホルダ511及び第2清掃ホルダ512の移動による一連の清掃処理は、以下の通りである。
まず、駆動モータ55がCW方向に回転駆動されることで、ワイヤ54が矢印D2方向に走行し、第1清掃ホルダ511及び第2清掃ホルダ512が矢印D2方向へ移動する。
その後、第2清掃ホルダ512は、矢印D2方向における透過部材42c,dの端部に到達し、第2ストッパ56bに当接することになる。これにより、第2清掃ホルダ512の矢印D2方向への移動が第2ストッパ56bによって規制されるため、ワイヤ54を走行させるために巻取ドラム59を回転させている巻取モータ55に作用する負荷が大きくなる。この負荷を後述する電流検出部を用いて検出することによって、第2清掃ホルダ512が第2ストッパ56bに到達したことが検出される。
そして、第2清掃ホルダ512が第2ストッパ56bに到達したことが検出された場合は、巻取モータ55の回転を停止させる。このとき、第1清掃ホルダ511は、透過部材42の長手方向において他端側であって、第二位置に到達している。従って、巻取モータ55の回転が停止されることで、透過部材42の長手方向において第二位置にて移動が停止される。
その後、巻取モータ55をCCW方向へ回転させることで、ワイヤ54を矢印D1方向に走行させる。これによって、第1清掃ホルダ511及び第2清掃ホルダ512は、それぞれ矢印D1方向へ移動する。
その後、第1清掃ホルダ511が矢印D1方向における透過部材42a,bの端部に到達し、第1ストッパ56aに当接することになる。これにより、第1清掃ホルダ511の矢印D1方向への移動が第1ストッパ56aによって規制されるため、ワイヤ54を走行させるために巻取ドラム59を回転させている巻取モータ55に作用する負荷が大きくなる。この負荷を後述する電流検出部を用いて検出することによって、第1清掃ホルダ511が第1ストッパ56aに到達したことが検出される。
そして、第1清掃ホルダ511が第1ストッパ56aに到達したことが検出された場合は、巻取モータ55のCCW方向への回転を停止し、所定回転だけCW方向へ回転させる。これによって矢印D2方向に所定距離だけワイヤ54を走行させてから、巻取モータ55の回転を停止させる。
このように、本実施形態では、第1清掃ホルダ511及び第2清掃ホルダ512が、透過部材42a〜d上をそれぞれ1往復することを、一連の清掃処理としている。そして、一連の清掃処理が終了した際は、矢印D2方向に所定距離だけワイヤ54を走行させることで第1清掃ホルダ511は第1ストッパ56aに当接しない位置であって、透過部材42の表面に清掃部材53が接触していない位置にて動作を停止させている。
つまり、第1清掃ホルダ511は、透過部材42の長手方向における透過部材42の端部と第1ストッパ56aとの間であって、透過部材42においてレーザ光が通過しない非通過領域に位置している。尚、このとき第2清掃ホルダ512は、長手方向において透過部材42の端部に当接しない位置、つまり、透過部材42においてレーザ光が通過しない非通過領域にて動作を停止させている。ここで、一連の清掃処理が終了した場合における第1清掃ホルダ511及び第2清掃ホルダ512の停止位置が、正常停止位置であり、清掃開始位置である。
以上で説明した一連の清掃処理では、第2清掃ホルダ512が第2ストッパ56baに到達した場合に巻取モータ55の回転を停止させてからCCW方向へ回転させる構成としたが、第2ストッパ56bに到達したことに応じてCCW方向へ回転させる構成であってもよい。
尚、本実施形態では、巻取モータ55を正回転(CW方向へ回転)させることでワイヤ54を矢印D1方向へ走行させ、巻取モータ55を逆回転(CCW方向へ回転)させることでワイヤ54を矢印D2方向へ走行させる構成としたが、巻取モータ55の正回転によってワイヤ54を矢印D2方向へ走行させ、逆回転によって矢印D1方向へ走行させる構成であってもよい。
また、カバー部40bには、第1清掃ホルダ511及び第2清掃ホルダ512の移動をガイドするためのガイド部材61a〜dが設けられている。そして、図4及び図5に示すように、第1清掃ホルダ511の両端部は、ガイド部材61a,61bとそれぞれ係合している。
ここで、図4は、第1清掃ホルダ511近傍を示す部分斜視図である。尚、第2清掃ホルダ512についても第1清掃ホルダ511の構成と同様に、第2清掃ホルダ512の両端部は、ガイド部材61c,61dとそれぞれ係合している。図5は、第1清掃ホルダ511の清掃部材53aを保持している側の端部における部分断面図である。ここでは、第1清掃ホルダ511の構成のみを説明するが、本実施形態では、第2清掃ホルダ512にも同様の構成を用いるものとする。
図4及び図5に示すように、ガイド部材61a〜dは、カバー部40bと一体的に形成され、カバー部40bの上面から上方に突出するように設けられている。
ここで、ガイド部材61a〜dは、図5に示すように、カバー部40bの上面に対して上方に突出する第1突部61aaと、第1突部61aaから清掃部材53aに対して離れる方向に延びる第2突部61abを有している。
そして、第1清掃ホルダ511の一端側の端部511aが、第2突部61abの下方に潜り込むように形成されている。ここで、端部511aは、第2突部61abと当接部が円弧形状となるように構成されている。このように、端部511aを円弧形状とすることで、第1清掃ホルダ511が矢印D1方向または矢印D2方向(図3参照)へ移動する際の摺動抵抗を低減させることができる。
尚、本実施形態では、第1清掃ホルダ511の一端側のみを詳細に説明するが、他端側も同様の構成を有しているものとする。また、第2清掃ホルダ512についても同様の形状を有しているものとする。
また、第1清掃ホルダ511及び第2清掃ホルダ512は、ガイド部材61a〜dに係合することで、透過部材42a〜dに対して第1清掃ホルダ511及び第2清掃ホルダ512に保持される清掃部材53a〜dが離間する方向に移動してしまうことを抑制している。このとき、第1清掃ホルダ511及び第2清掃ホルダ512とガイド部材61a〜dの係合位置は、透過部材42a〜dに清掃部材53a〜dが所定の接触圧で接触するような位置となっている。
また、本実施形態では、ガイド部材61a〜d、第1ストッパ56a及び第2ストッパ56bをカバー部40bと一体的に樹脂で形成する構成としているが、カバー部40bと別体構成としてもよい。
上述したように、本実施形態では、清掃処理時に第1清掃ホルダ511及び第2清掃ホルダ512をそれぞれ矢印D1方向や矢印D2方向へ移動させることで、透過部材42a〜dの上面を清掃することが可能となっている。そして、この清掃処理は、操作者から操作部304等を介して任意のタイミングで清掃処理実行の指示を受け付けた場合や、画時形成されたシートの積算枚数が所定枚数に達したことに応じて定期的に実行される。
ここで、定期的に清掃処理を実行する所定枚数は、初期設定として予め1万枚等に設定されている。この初期設定に対して、操作者は、例えば、操作部304を介して500枚毎の値を入力することで、清掃処理を実行する際の所定枚数を設定変更できる。
このように、定期的に清掃処理を実行する場合、画像形成ジョブの実行中に画像形成枚数が所定枚数に達すると、画像形成ジョブを一旦停止して清掃機構51を動作させて清掃処理を行う。しかしながら、画像形成ジョブを一旦停止させるため、画像形成ジョブを実行している操作者は、清掃処理が終わるまで待機しなければならず、ユーザビリティを損なっていた。
そこで、本実施形態では、定期的に清掃処理を実行する場合であっても、操作者を待たせる時間を低減するために、清掃処理を実行するタイミングを画像形成ジョブの内容に応じて変更する構成としている。
以下では、図6〜図8を用いて本実施形態における画像形成ジョブ実行時のシーケンスについて説明をする。図6は、本実施形態における画像形成ジョブ実行時のシーケンスを行うための制御構成を示す制御ブロック図である。また、図7は、本実施形態における画像形成ジョブ実行時のシーケンスを示すフローチャートである。
本実施形態において、CPU601は、画像形成装置1の全体を制御し、画像形成ジョブのシーケンスにおける制御を行う。また、CPU601は、ROM602に格納されたファームウェアプログラムやファームウェアプログラムを制御するためのブートプログラムを読み出し、記憶部としてのRAM603を作業領域及びデータの一次記憶領域として使用して各種制御を実行する。
そして、CPU601は、光走査装置40を制御するための清掃制御部604に接続され、清掃制御部604を介して清掃機構51を制御する。清掃制御部604は、CPU601からの清掃処理の実行指示に基づいて、巻取モータ55をCW方向やCCW方向へ回転駆動させる。つまり、CPU601は、清掃制御部604を介して、清掃処理における巻取モータ55の制御を行っている。
ここで、巻取モータ55には、前述したように巻取モータ55の駆動電流を検出し、検出結果を清掃制御部604へ出力する電流検出部605が設けられている。そして、清掃制御部604は、電流検出部605の検出結果に基づいて、巻取モータ55のCW方向やCCW方向への回転動作、もしくは巻取モータ44の停止を制御する。ここで、清掃制御部604は、上述したように、第1清掃ホルダ511が第1ストッパ56aに当接したこと又は第2清掃ホルダ512が第2ストッパ56bに当接したことを、電流検出部605の検出結果に基づいて判定している。
巻取モータ55は、一定電圧で制御されており、第1清掃ホルダ511または第2清掃ホルダ512が第1ストッパ56aまたは第2ストッパ56bに当接すると、巻取モータ55に作用する負荷が重くなることに応じて駆動電流が増加する。
従って、清掃制御部604は、電流検出部605によって検出される巻取モータ55の駆動電流が所定の値よりも大きくなった場合に、第1清掃ホルダ511または第2清掃ホルダ512が第1ストッパ56aまたは第2ストッパ56bに当接し、透過部材42a〜dの端部から端部への1方向の移動が終了したことを検出する。つまり、清掃処理における往復動作の片道の清掃が終了したことを検出する。
ここで、所定の値とは、第1清掃ホルダ511または第2清掃ホルダ512が透過部材42上を移動している間に巻取モータ55に流れる駆動電流値よりも大きい値である。つまり、所定の値とは、第1清掃ホルダ511または第2清掃ホルダ512が第1ストッパ56aまたは第2ストッパ56bに当接する前に巻取モータ55に流れている駆動電流値よりも大きい値である。また、所定の値とは、第1清掃ホルダ511または第2清掃ホルダ512が第1ストッパ56aまたは第2ストッパ56bに当接したことを検出できる値であって、モータの故障等その他の変動によって増加する電流値の値を含まない値に設定する。
尚、本実施形態では、第1清掃ホルダ511または第2清掃ホルダ512の第1ストッパ56aまたは第2ストッパ56bへの当接の判定を検出した電流値と所定の値との比較で行ったが他の方法で判定するものであってもよい。例えば、所定の値との比較ではなく、検出した電流値の変化量を判定することで行ってもよい。
また、CPU601は、操作部304等を介して操作者からの指示を受け付けるユーザインターフェース部(以下、UI部)606と接続されている。CPU601は、UI部606を介して、操作者から画像形成ジョブの実行指示や清掃処理の実行指示を受け付ける。また、CPU601は、UI部606を介して定期的な清掃処理のための画像形成枚数の設定を受け付ける。ここで、CPU601は、操作者によって清掃設定枚数を受け付けると、受け付けた設定を清掃設定枚数としてRAM603に保存する。
そして、CPU601は、画像形成ジョブを受け付けた場合、画像形成部10によってシートに画像が形成される度に画像形成枚数情報をカウンタ607に出力し、カウンタ607のカウント値を1ずつ増加させる。ここで、CPU601は、画像形成部10において、シートが通過したときに1カウント、もしくはシートに画像形成を行ったときに1カウントさせるようにカウンタ607に画像形成枚数情報を出力する。このとき、シートに対して画像形成を行った回数をカウントする場合、例えばシート1枚に対して画像形成する毎に1カウントしてもよいし、シート1枚の表裏何れかの1ページに画像形成する毎に1カウントしてもよい。シートの1ページに対して画像形成する毎に1カウントする場合、例えば、A4サイズのシートに両面印刷を行う場合は、2ページのシートとしてカウントされる。つまり、両面印刷を行う場合は「1枚のシート」=「2ページ分のカウント(2カウント)」となる。このように、カウンタ607は、画像形成されたシートのページ数もしくは画像形成されたシートの枚数をカウントし、カウント値をCPU601に出力する。
そして、CPU601は、カウンタ607から出力されるカウント値と、RAM603に保存した清掃設定枚数とを比較し、清掃処理を実行するか否かの判定を行う。判定の結果、清掃処理を実行する場合は、清掃制御部604を介して清掃機構51を制御し、上述したような清掃処理を実行させる。ここで、清掃処理を実行した後、CPU601は、カウンタ607のカウント値を0とし、カウント値をリセットする。
尚、本実施形態では、CPU601が全体の制御を行う構成としたが、いくつかの内蔵モジュールを用いて同様の制御を行うものであってもよい。また、清掃制御部604を介さずに、直接CPU601によって巻取モータ55等を制御する構成であってもよい。
次に、CPU601による清掃処理を定期的に行うための清掃設定枚数の設定シーケンスについて、図7を用いて説明する。
まず、画像形成装置1が起動すると、CPU601は、清掃設定枚数を初期設定値としてRAM603に保存する(S700)。ここで、清掃設定枚数の初期設定値は、例えば1000枚等に設定する。
そして、UI部606を介して操作者がメンテナンスモードの操作を行ったか否かを判定する(S701)。メンテナンスモードの操作がされない場合(S701No)は、清掃設定枚数を初期設定値として、清掃設定枚数の設定シーケンスを終了する。CPU601は、メンテナンスモードの操作がされた場合(S701Yes)は、操作者によって清掃設定枚数が入力されたか否かを判定する(S702)。
CPU601は、操作者によって清掃設定枚数が入力されない場合(S702No)、清掃設定枚数を初期設定値として、清掃設定枚数の設定シーケンスを終了する。一方、操作者によって清掃設定枚数が入力された場合(S702Yes)、CPU601は、清掃設定枚数を操作者によって設定された枚数に変更し、RAM603に保存し(S703)、清掃設定枚数の設定シーケンスを終了する。
次に、CPU601による本実施形態の画像形成シーケンスについて、図8を用いて説明する。図8は、本実施形態における画像形成シーケンスを示すフローチャートである。
まず、CPU601は、操作者から操作部304等を介して画像形成ジョブを受け付けた場合、指定された画像形成枚数や片面両面印刷などの印刷条件を読み出し、受け付けた画像形成ジョブに対する動作設定をRAM603に保存する(S800)。
CPU601は、S800で保存した動作設定により画像形成枚数が設定されると、カウンタ607のカウント値を取得する(S801)。そして、CPU601は、ユーザがS800で設定した画像形成枚数とS801で読み出したカウント値の合計を算出し、合計値が清掃設定枚数の−50枚以上であって+50枚以下であるか判断する(S802)。ここで、本実施形態においては、清掃設定枚数の±50の値を近傍の値とし、清掃設定枚数−50〜清掃設定枚数+50の範囲を所定の値とする。また、清掃設定枚数−50枚の値は、第1の枚数の一例であり、清掃設定枚数+50の値は第2の枚数及び第2清掃設定枚数の一例である。また、ここでの清掃設定枚数は所定の枚数または第1清掃設定枚数の一例である。
CPU601は、合計値が清掃設定枚数の−50枚以上であって+50枚以下であった場合(S802のYes)、画像形成動作を実行する(S803)。CPU601は、シートに対して画像形成動作をする度に、カウンタ607のカウント値に1を加算する(S804)。その後、CPU601は、操作者がS800で設定した画像形成ジョブのすべての画像形成が完了したか否かを判定する(S805)。そして、CPU601は、すべての画像形成が完了していない場合(S805No)は画像形成ジョブの実行を継続し、シートに画像形成する度にカウンタ607のカウント値を1ずつ加算する。また、CPU601は、すべての画像形成が完了した場合(S805Yes)、清掃制御部604に清掃実行指示を出力し、清掃機構51を制御して清掃を行う(S806)。
その後、CPU601は、カウンタ607のカウント値をクリアし(S807)、カウント値0としてRAM603に保存し(S808)、次の画像形成ジョブを受け付けているか否かを判定する(S809)。CPU601は、次の画像形成ジョブを受け付けている場合(S809Yes)は、S800に戻り、次の画像形成ジョブを受け付けていない場合(S809No)は、画像形成シーケンスを終了する。
また、S800で保存した画像形成枚数とS801で取得したカウント値の合計値が清掃設定枚数の−50枚以上+50枚でなかった場合(S802のNo)、CPU601は、合計値が清掃設定枚数−50枚より少ないか否かを判定する(S810)。CPU601は、合計値が清掃設定枚数−50枚より少ない場合(S810のYes)、画像形成動作を実行し(S811)、カウンタ607のカウント値を1加算する(S812)。
その後、CPU601は、操作者がS800で設定した画像形成ジョブのすべての画像形成が終了したか否かを判定する(S813)。CPU601は、すべての画像形成が終了していない場合(S813No)、画像形成ジョブの実行を継続し、シートに画像を形成する度にS811にてカウンタ607のカウント値を1ずつ加算する。また、CPU601は、すべての画像形成が終了した場合(S813Yes)、この時のカウンタ607のカウント値をRAM603に保存する(S808)。そして、CPU601は、次の画像形成ジョブを受け付けている場合(S809Yes)は、S800に戻り、次の画像形成ジョブを受け付けていない場合(S809No)は、画像形成シーケンスを終了する。
また、CPU601は、S800で保存した画像形成枚数とS801で取得したカウント値の合計値が+50枚より多かった場合(S810のNO)、画像形成動作を実行する(S814)。CPU601は、S814でシートに対して画像を形成すると、カウンタ607のカウント値を1増やす(S815)。
そして、CPU601は、S815でカウントアップしたカウンタ607のカウント値が清掃設定枚数に達したか否かを判断する(S816)。ここで、S815では、例えばカウント値が100であった場合、1枚のシートに画像形成が実行されるとカウント値は1加算され101となる。そして、S816では、CPU601は101という値を取得してRAM603に保存されている清掃設定枚数と比較し、カウント値が清掃設定枚数と等しいか否かを判定する。
そして、S816の結果が清掃設定枚数と等しくなるまでは画像形成動作を実行し(S816のNo)、S816の結果が清掃設定枚数と等しいと判定された場合(S816のYes)、画像形成動作を中断する(S817)。
そして、CPU601は、清掃制御部604に清掃実行指示を出力し、清掃処理を行う(S818)。その後、CPU601は、S818の清掃処理を終えると、カウンタ607のカウント値をクリアし(S819)、中断していた画像形成ジョブを再開し、画像形成動作を実行する(S820)。
その後、CPU601は、S820で画像形成動作を実行するとカウンタ607のカウント値を1増やす(S821)。そして、CPU601は、操作者がS800で設定した画像形成ジョブのすべての画像形成が終了したか否かを判定する(S822)。CPU601は、すべての画像形成が終了していない場合(S822No)は画像形成ジョブの実行を継続し、シート1枚に対して画像形成を行うたびにカウンタ607のカウント値を1ずつ加算する。CPU601は、すべての画像形成が終了した場合(S822Yes)は、このときのカウント値をRAM603に保存する(S808)。
そして、CPU601は、次の画像形成ジョブを受け付けている場合(S809Yes)は、S800に戻り、次の画像形成ジョブを受け付けていない場合(S809No)は、画像形成シーケンスを終了する。
このように、本実施形態では、画像形成ジョブを行っている最中に、カウント値(画像形成枚数)が清掃設定枚数に到達する場合であっても、画像形成ジョブを中断させず、画像形成ジョブが終了してから清掃処理を行う。従って、画像形成ジョブの実行を指示した操作者を待たせることがなくなり、ユーザビリティの低下を防ぐことができる。
また、本実施形態では、操作者から画像形成ジョブを受け付けた際に、ジョブ中の画像形成枚数と現在のカウント値(累積した画像形成枚数)とを合算した値が清掃設定枚数よりも±50枚の範囲であるか否かを判定し、清掃処理を行うタイミングを変更した。これにより、画像形成ジョブを終えた際に、累積の画像形成枚数が清掃設定枚数より少ない場合であっても、清掃設定枚数の近傍の枚数である場合は画像形成ジョブ完了後に清掃処理を行うことで、次の画像形成ジョブを行う際に清掃処理による画像形成ジョブの中断を防ぐことができる。また、画像形成ジョブを終えた際に、累積の画像形成枚数が清掃設定枚数より多い場合であっても、清掃設定枚数の近傍の枚数である場合は画像形成ジョブ完了後に清掃処理を行うことで、ジョブを中断させることでダウンタイムが発生することを防ぐことができる。
また、画像形成ジョブの実行中に清掃設定枚数を大幅に超えるような画像形成ジョブを受け付けた場合は、清掃処理によって画像形成ジョブを中断することにはなるが、透過部材42上に異物が存在することによる画像品質の低下を防ぐことができる。
尚、本実施形態では、清掃設定枚数の±50枚の範囲を清掃設定枚数の近傍の値として所定の範囲を設定したが、画像形成装置1を動作させた際の透過部材42の汚れ量によって、清掃設定枚数の近傍の値や所定の範囲を可変してもよい。例えば、±100枚の範囲を清掃設定枚数の近傍の値としてもよい。
<第2の実施形態>
次に、第2の実施形態について説明する。尚、第2の実施形態では、画像形成ジョブを受け付けた際の清掃処理実行タイミングの判定に用いる清掃設定枚数の近傍値が異なる以外は、第1の実施形態と同じ構成であるため、同構成については同符号を付して説明を省略する。
図9は、第2実施形態における画像形成シーケンスを説明するためのフローチャートである。まず、CPU601は、操作者から操作部304等を介して画像形成ジョブを受け付けた場合、指定された画像形成枚数や片面両面印刷などの印刷条件を読み出し、受け付けた画像形成ジョブに対する動作設定をRAM603に保存する(S900)。
CPU601は、S900で保存した動作設定により画像形成枚数が設定されると、カウンタ607のカウント値を取得する(S901)。そして、CPU601は、ユーザがS900で設定した画像形成枚数とS901で読み出したカウント値の合計値を算出し、合計値が清掃設定枚数の−10%以上であって+10%以内であるか判断する(S902)。ここで、本実施形態においては、清掃設定枚数±10%の値を近傍の値とし、清掃設定枚数×90%〜清掃設定枚数×110%の範囲を所定の値を含む所定の範囲とする。つまり、CPU601は、S902において、画像形成ジョブ中の画像形成枚数と現在のカウント値との合計値が、清掃設定枚数に対する90%以上の値であって清掃設定枚数に対する110%以下の値であるか否かを判定する。より具体的には、CPU601は、清掃設定枚数が1000枚であった場合、S902において、画像形成ジョブ中の画像形成枚数と現在のカウント値との合計値が900枚以上1100枚以下であるか否かを判定する。ここで、清掃設定枚数×90%の値は第1の枚数の一例であり、清掃設定枚数×110%の値は第2の枚数、または第2清掃設定枚数の一例である。また、ここでの清掃設定枚数は所定の枚数または第1清掃枚数の一例である。
CPU601は、合計値が清掃設定枚数の−10%以上であって+10%以内であった場合(S902のYes)、画像形成動作を実行する(S903)。CPU601は、シートに対して画像形成動作をすると、カウンタ607のカウント値に1を加算する(S904)。その後、CPU601は、操作者がS900で設定した画像形成ジョブのすべての画像形成が完了したか否かを判定する(S905)。そして、CPU601は、すべての画像形成が完了していない場合(S905No)は画像形成ジョブの実行を継続し、シートに画像形成する度にカウンタ607のカウント値を1ずつ加算する。また、CPU601は、すべての画像形成が完了した場合(S905Yes)、清掃制御部604に清掃実行指示を出力し、清掃機構51を制御して清掃を行う(S906)。
その後、CPU601は、カウンタ607のカウント値をクリアし(S907)、カウント値0としてRAM603に保存(S908)する。そして、CPU601は、次の画像形成ジョブを受け付けているか否かを判定する(S909)。CPU601は、次の画像形成ジョブを受け付けている場合(S909Yes)は、S900に戻り、次の画像形成ジョブを受け付けていない場合(909No)は、画像形成シーケンスを終了する。
また、S900で保存した画像形成枚数とS901で取得したカウント値の合計値が清掃設定枚数の−10%以上であって+10%以内でなかった場合(S902のNo)、CPU601は、合計値が清掃設定枚数−10%より少ないか否かを判定する(S910)。CPU601は、合計値が清掃設定枚数−10%より少ない場合(S910のYes)、画像形成動作を実行し(S911)、カウンタ607のカウント値を1加算する(S912)。
その後、CPU601は、操作者がS900で設定した画像形成ジョブのすべての画像形成が終了したか否かを判定する(S913)。CPU601は、すべての画像形成が終了していない場合(S913No)、画像形成ジョブの実行を継続し、シートに画像を形成する度にS911にてカウンタ607のカウント値を1ずつ加算する。また、CPU601は、すべての画像形成が終了した場合(S913Yes)、この時のカウンタ607のカウント値をRAM603に保存する(S908)。そして、CPU601は、次の画像形成ジョブを受け付けている場合(S909Yes)は、S900に戻り、次の画像形成ジョブを受け付けていない場合(S909No)は、画像形成シーケンスを終了する。
また、CPU601は、S900で保存した画像形成枚数とS901で取得したカウント値の合計値が+10%より多かった場合(S910のNO)、画像形成動作を実行する(S914)。CPU601は、S914でシートに対して画像を形成すると、カウンタ607のカウント値を1増やす(S915)。
そして、CPU601は、S915でカウントアップしたカウンタ607のカウント値が清掃設定枚数に達したか否かを判断する(S916)。
そして、S916の結果が清掃設定枚数と等しくなるまでは画像形成動作を実行し(S916のNo)、S916の結果が清掃設定枚数と等しいと判定された場合(S916のYes)、画像形成動作を中断する(S917)。
そして、CPU601は、清掃制御部604に清掃実行指示を出力し、清掃処理を行う(S918)。その後、CPU601は、S918の清掃処理を終えると、カウンタ607のカウント値をクリアし(S919)、中断していた画像形成ジョブを再開し、画像形成動作を実行する(S920)。
その後、CPU601は、S920で画像形成動作を実行するとカウンタ607のカウント値を1増やす(S921)。そして、CPU601は、操作者がS900で設定した画像形成ジョブのすべての画像形成が終了したか否かを判定する(S922)。CPU601は、すべての画像形成が終了していない場合(S922No)は画像形成ジョブの実行を継続し、シート1枚に対して画像形成を行う度にカウンタ607のカウント値を1ずつ加算する。CPU601は、すべての画像形成が終了した場合(S922Yes)は、このときのカウント値をRAM603に保存する(S908)。
そして、CPU601は、次の画像形成ジョブを受け付けている場合(S909Yes)は、S900に戻り、次の画像形成ジョブを受け付けていない場合(S909No)は、画像形成シーケンスを終了する。
このように、本実施形態では、画像形成ジョブを行っている最中に、カウント値(画像形成枚数)が清掃設定枚数に到達する場合であっても、画像形成ジョブを中断させず、画像形成ジョブが終了してから清掃処理を行う。従って、画像形成ジョブの実行を指示した操作者を待たせることがなくなり、ユーザビリティの低下を防ぐことができる。
また、本実施形態では、操作者から画像形成ジョブを受け付けた際に、ジョブ中の画像形成枚数と現在のカウント値(累積した画像形成枚数)とを合算した値が清掃設定枚数の近傍の値であるか否か(−10%以上であって+10%以内であるか)を判定し、清掃処理を行うタイミングを変更した。これにより、画像形成ジョブを終えた際に、累積の画像形成枚数が清掃設定枚数より少ない場合であっても、清掃設定枚数の近傍の枚数である場合は画像形成ジョブ完了後に清掃処理を行うことで、次の画像形成ジョブを行う際に清掃処理による画像形成ジョブの中断を防ぐことができる。また、画像形成ジョブを終えた際に、累積の画像形成枚数が清掃設定枚数より多い場合であっても、清掃設定枚数の近傍の枚数である場合は画像形成ジョブ完了後に清掃処理を行うことで、ジョブを中断させることでダウンタイムが発生することを防ぐことができる。従って、ユーザビリティの低下を抑制することができる。
また、画像形成ジョブの実行中に清掃設定枚数を大幅に超えるような画像形成ジョブを受け付けた場合は、清掃処理によって画像形成ジョブを中断することにはなるが、透過部材42上に異物が存在することによる画像品質の低下を防ぐことができる。従って、操作者は、画像品質が低下していることによる画像形成ジョブのやり直しなどをすることがなくなるため、結果としてユーザビリティの低下を抑制することができる。
また、本実施形態では、清掃設定枚数の±10%の範囲を清掃設定枚数の近傍の値とした。これにより、清掃設定枚数が操作者によって変更可能であっても、設定された清掃設定枚数に応じた近傍の値に基づいて、清掃処理の実行タイミングを変更することができる。これにより、操作者によって設定された清掃設定枚数に対して、清掃処理の実行タイミングが早すぎ又は遅すぎることを抑制することが可能となる。従って、清掃処理が行われないことによる画像品位の低下や、清掃タイミングが早まることによって頻繁に清掃処理が行われてしまうことによるユーザビリティの低下を抑制することができる。
<第3の実施形態>
次に、第3の実施形態について説明する。尚、第3の実施形態では、画像形成ジョブを受け付けた際の清掃処理実行タイミングの判定に用いる清掃設定枚数の近傍値が異なる以外は、第1の実施形態と同じ構成であるため、同構成については同符号を付して説明を省略する。
図10は、第3実施形態における画像形成シーケンスを説明するためのフローチャートである。まず、CPU601は、操作者から操作部304等を介して画像形成ジョブを受け付けた場合、指定された画像形成枚数や片面両面印刷などの印刷条件を読み出し、受け付けた画像形成ジョブに対する動作設定をRAM603に保存する(S1000)。
CPU601は、S1000で保存した動作設定により画像形成枚数が設定されると、カウンタ607のカウント値を取得する(S1001)。そして、CPU601は、ユーザがS1000で設定した画像形成枚数とS1001で読み出したカウント値の合計値を算出し、合計値が清掃設定枚数の−10%以上であるか判断する(S1002)。ここで、本実施形態においては、清掃設定枚数−10%の値を近傍の値とし、清掃設定枚数×90%〜清掃設定枚数の範囲を所定の値を含む所定の範囲とする。つまり、CPU601は、S1002において、画像形成ジョブ中の画像形成枚数と現在のカウント値との合計値が、清掃設定枚数に対する90%以上の値であるか否かを判定する。より具体的には、CPU601は、清掃設定枚数が1000枚であった場合、S1002において、画像形成ジョブ中の画像形成枚数と現在のカウント値との合計値が900枚以上であるか否かを判定する。ここで、清掃設定枚数×90%の値は第1の枚数の一例であり、清掃設定枚数×110%の値は第2の枚数の一例である。また、ここでの清掃設定枚数は所定の枚数の一例である。
CPU601は、合計値が清掃設定枚数の−10%以上であった場合(S1002のYes)、画像形成動作を実行する(S1003)。CPU601は、シートに対して画像形成動作をすると、カウンタ607のカウント値に1を加算する(S1004)。その後、CPU601は、操作者がS1000で設定した画像形成ジョブのすべての画像形成が完了したか否かを判定する(S1005)。そして、CPU601は、すべての画像形成が完了していない場合(S1005No)は画像形成ジョブの実行を継続し、シートに画像形成する度にカウンタ607のカウント値を1ずつ加算する。また、CPU601は、すべての画像形成が完了した場合(S1005Yes)、清掃制御部604に清掃実行指示を出力し、清掃機構51を制御して清掃を行う(S1006)。
その後、CPU601は、カウンタ607のカウント値をクリアし(S1007)、カウント値0としてRAM603に保存(S1008)する。そして、CPU601は、次の画像形成ジョブを受け付けているか否かを判定する(S1009)。CPU601は、次の画像形成ジョブを受け付けている場合(S1009Yes)は、S1000に戻り、次の画像形成ジョブを受け付けていない場合(1009No)は、画像形成シーケンスを終了する。
また、S1000で保存した画像形成枚数とS1001で取得したカウント値の合計値が清掃設定枚数の−10%以上でなかった場合(S1002のNo)、合計値が清掃設定枚数−10%より少ないため、CPU601は、画像形成動作を実行し(S1010)、カウンタ607のカウント値を1加算する(S1011)。
その後、CPU601は、操作者がS1000で設定した画像形成ジョブのすべての画像形成が終了したか否かを判定する(S1012)。CPU601は、すべての画像形成が終了していない場合(S1012No)、画像形成ジョブの実行を継続し、シートに画像を形成する度にS1011にてカウンタ607のカウント値を1ずつ加算する。また、CPU601は、すべての画像形成が終了した場合(S1012Yes)、この時のカウンタ607のカウント値をRAM603に保存する(S1008)。そして、CPU601は、次の画像形成ジョブを受け付けている場合(S1009Yes)は、S1000に戻り、次の画像形成ジョブを受け付けていない場合(S1009No)は、画像形成シーケンスを終了する。
このように、本実施形態では、累積の画像形成枚数とユーザが設定した画像形成ジョブの枚数の合計値が清掃設定枚数×90%〜清掃設定枚数の範囲であった場合に、画像形成ジョブ完了後に清掃動作を実行する構成とした。つまり、清掃設定枚数近傍の範囲を、第2の実施形態に対して狭くした。
この構成であっても、画像形成ジョブを終えた際に、累積の画像形成枚数が清掃設定枚数より少ない場合であっても、清掃設定枚数の近傍の枚数である場合は画像形成ジョブ完了後に清掃処理を行うことで、次の画像形成ジョブを行う際に清掃処理による画像形成ジョブの中断を防ぐことができる。
<第4の実施形態>
次に、第4の実施形態について説明する。尚、第4の実施形態では、画像形成ジョブを受け付けた際の清掃処理実行タイミングの判定に用いる清掃設定枚数の近傍値が異なる以外は、第1の実施形態と同じ構成であるため、同構成については同符号を付して説明を省略する。
図11は、第4実施形態における画像形成シーケンスを説明するためのフローチャートである。まず、CPU601は、操作者から操作部304等を介して画像形成ジョブを受け付けた場合、指定された画像形成枚数や片面両面印刷などの印刷条件を読み出し、受け付けた画像形成ジョブに対する動作設定をRAM603に保存する(S1100)。
CPU601は、S900で保存した動作設定により画像形成枚数が設定されると、カウンタ607のカウント値を取得する(S1101)。そして、CPU601は、ユーザがS1100で設定した画像形成枚数とS1101で読み出したカウント値の合計値を算出し、合計値が清掃設定枚数の+10%以内であるか判断する(S1102)。ここで、本実施形態においては、清掃設定枚数+10%の値を近傍の値とし、清掃設定枚数〜清掃設定枚数×110%の範囲を所定の値を含む所定の範囲とする。つまり、CPU601は、S1102において、画像形成ジョブ中の画像形成枚数と現在のカウント値との合計値が、清掃設定枚数に対する110%以下の値であるか否かを判定する。より具体的には、CPU601は、清掃設定枚数が1000枚であった場合、S1102において、画像形成ジョブ中の画像形成枚数と現在のカウント値との合計値が1100枚以下であるか否かを判定する。ここで、清掃設定枚数は第1清掃枚数の一例であり、清掃設定枚数×110%の値は第2清掃設定枚数の一例である。
CPU601は、合計値が清掃設定枚数の+10%以内であった場合(S1102のYes)、画像形成動作を実行する(S1103)。CPU601は、シートに対して画像形成動作をすると、カウンタ607のカウント値に1を加算する(S1104)。その後、CPU601は、操作者がS1100で設定した画像形成ジョブのすべての画像形成が完了したか否かを判定する(S1105)。そして、CPU601は、すべての画像形成が完了していない場合(S1105No)は画像形成ジョブの実行を継続し、シートに画像形成する度にカウンタ607のカウント値を1ずつ加算する。また、CPU601は、すべての画像形成が完了した場合(S1105Yes)、清掃制御部604に清掃実行指示を出力し、清掃機構51を制御して清掃を行う(S1106)。
その後、CPU601は、カウンタ607のカウント値をクリアし(S1107)、カウント値0としてRAM603に保存(S1108)する。そして、CPU601は、次の画像形成ジョブを受け付けているか否かを判定する(S1109)。CPU601は、次の画像形成ジョブを受け付けている場合(S1109Yes)は、S1100に戻り、次の画像形成ジョブを受け付けていない場合(S1109No)は、画像形成シーケンスを終了する。
また、S1100で保存した画像形成枚数とS1101で取得したカウント値の合計値が+10%より多かった場合(S1102NO)、画像形成動作を実行する(S1110)。CPU601は、S1110でシートに対して画像を形成すると、カウンタ607のカウント値を1増やす(S1111)。
そして、CPU601は、S1111でカウントアップしたカウンタ607のカウント値が清掃設定枚数に達したか否かを判断する(S1112)。
そして、S1112の結果が清掃設定枚数と等しくなるまでは画像形成動作を実行し(S1112のNo)、S1112の結果が清掃設定枚数と等しいと判定された場合(S1112Yes)、画像形成動作を中断する(S1113)。
そして、CPU601は、清掃制御部604に清掃実行指示を出力し、清掃処理を行う(S1114)。その後、CPU601は、S918の清掃処理を終えると、カウンタ607のカウント値をクリアし(S1115)、中断していた画像形成ジョブを再開し、画像形成動作を実行する(S1116)。
その後、CPU601は、S1116で画像形成動作を実行するとカウンタ607のカウント値を1増やす(S1117)。そして、CPU601は、操作者がS1100で設定した画像形成ジョブのすべての画像形成が終了したか否かを判定する(S1118)。CPU601は、すべての画像形成が終了していない場合(S1118No)は画像形成ジョブの実行を継続し、シート1枚に対して画像形成を行う度にカウンタ607のカウント値を1ずつ加算する。CPU601は、すべての画像形成が終了した場合(S1118Yes)は、このときのカウント値をRAM603に保存する(S1108)。
そして、CPU601は、次の画像形成ジョブを受け付けている場合(S1109Yes)は、S1100に戻り、次の画像形成ジョブを受け付けていない場合(S1109No)は、画像形成シーケンスを終了する。
このように、本実施形態では、画像形成ジョブを終えた際に、累積の画像形成枚数が清掃設定枚数より多い場合であっても、清掃設定枚数の近傍の枚数である場合は画像形成ジョブ完了後に清掃処理を行うことで、ジョブを中断させることでダウンタイムが発生することを防ぐことができる。従って、ユーザビリティの低下を抑制することができる。
また、画像形成ジョブの実行中に清掃設定枚数を大幅に超えるような画像形成ジョブを受け付けた場合は、清掃処理によって画像形成ジョブを中断することにはなるが、透過部材42上に異物が存在することによる画像品質の低下を防ぐことができる。従って、操作者は、画像品質が低下していることによる画像形成ジョブのやり直しなどをすることがなくなるため、結果としてユーザビリティの低下を抑制することができる。
<他の実施形態>
上述した実施形態では、画像形成部10の鉛直方向下方に光走査装置40を設ける構成としたが、光走査装置40を画像形成部10の鉛直方向上方に設ける構成であってもよい。この構成の場合、透過部材42a〜dは画像形成部10に対して上方に設けられるため、画像形成部10からトナーや紙粉等が落下することはないが、飛散したトナーや紙粉が付着する虞がある。そのため、画像形成部10の鉛直方向上方に光走査装置40を設ける構成であっても、清掃機構51を設けることで透過部材42a〜dに付着したトナーや紙粉等の異物を除去することができるようになる。
また、上述した実施形態では、CPU601からの画像形成枚数情報に基づいてカウンタ607がカウント値を1ずつ加算していく構成としたが、画像形成枚数情報に基づいてカウンタ607がカウント値を1ずつ減算していく構成としてもよい。この場合は、設置絵された清掃設定枚数から減算する構成であってもよく、清掃設定枚数を「−1000」のように設定したり、カウンタ607によってカウントされたカウント値の絶対値に基づいて清掃設定枚数に到達したか否かを判定するものであってもよい。
このような構成であっても、画像形成ジョブを行っている最中にカウント値(画像形成枚数)が清掃設定枚数に到達する場合、画像形成ジョブを中断させずに画像形成ジョブが終了してから清掃処理を行う。従って、画像形成ジョブの実行を指示した操作者を待たせることがなくなり、ユーザビリティの低下を防ぐことができる。
また、上述した実施形態では、操作部304を介して操作者から画像形成ジョブを受け付ける構成を開示したが、通信回線を介して外部機器から画像形成ジョブを受け付ける構成にも、上述した実施形態を採用することができる。このように、画像形成装置1は、様々な方法により操作者から画像形成ジョブを受け付けることが可能となっている。これに対し、上述した実施形態を用いることで、操作部304を介して画像形成ジョブを入力する操作者に対しては、ユーザビリティの低下を抑制するといった効果が特に大きいと考えられる。これは、操作部304を介して画像形成ジョブを入力する操作者は、画像形成ジョブの完了を装置本体の前で待つ可能性が高いためである。
同様に、画像読取装置306を用いて読み取った原稿画像を画像形成部1によってコピーする画像形成ジョブを行う操作者に対しても、装置本体の前でジョブの完了を待つ可能性が高いため、上述した実施形態を用いることによる効果が特に大きいと考えられる。この他に、画像形成装置1に近距離無線通信方式を用いた不図示のユーザ認証部等を設ける構成に対しても、上述した実施形態を用いることによる効果が特に大きいと考えられる。これは、送信したジョブに対して画像形成するために操作者がユーザ認証部にて認証動作をするため、操作者がそのまま画像形成ジョブの完了を装置の前で待つ可能性が高いためである。
このように、上述した実施形態では、画像形成装置1に対して画像形成ジョブを実行させる操作者に対して、光走査装置40の清掃動作に伴って操作者のジョブを中断してしまうことを抑制することができるため、ユーザビリティの低下を抑制することができる。