JP6673940B2 - 腕部支持外骨格 - Google Patents
腕部支持外骨格 Download PDFInfo
- Publication number
- JP6673940B2 JP6673940B2 JP2017559672A JP2017559672A JP6673940B2 JP 6673940 B2 JP6673940 B2 JP 6673940B2 JP 2017559672 A JP2017559672 A JP 2017559672A JP 2017559672 A JP2017559672 A JP 2017559672A JP 6673940 B2 JP6673940 B2 JP 6673940B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- torque
- link
- person
- generator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 88
- 238000006243 chemical reaction Methods 0.000 claims description 43
- 230000008878 coupling Effects 0.000 claims description 20
- 238000010168 coupling process Methods 0.000 claims description 20
- 238000005859 coupling reaction Methods 0.000 claims description 20
- 241001653121 Glenoides Species 0.000 claims description 2
- 210000000038 chest Anatomy 0.000 description 27
- 230000005484 gravity Effects 0.000 description 14
- 230000007935 neutral effect Effects 0.000 description 13
- 210000003141 lower extremity Anatomy 0.000 description 8
- 210000000323 shoulder joint Anatomy 0.000 description 7
- 210000001562 sternum Anatomy 0.000 description 7
- 230000036316 preload Effects 0.000 description 5
- 210000001991 scapula Anatomy 0.000 description 5
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 210000000245 forearm Anatomy 0.000 description 3
- 238000005452 bending Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000003187 abdominal effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 210000002758 humerus Anatomy 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images
































































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25H—WORKSHOP EQUIPMENT, e.g. FOR MARKING-OUT WORK; STORAGE MEANS FOR WORKSHOPS
- B25H1/00—Work benches; Portable stands or supports for positioning portable tools or work to be operated on thereby
- B25H1/10—Work benches; Portable stands or supports for positioning portable tools or work to be operated on thereby with provision for adjusting holders for tool or work
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H1/00—Supports or magazines for piles from which articles are to be separated
- B65H1/08—Supports or magazines for piles from which articles are to be separated with means for advancing the articles to present the articles to the separating device
- B65H1/10—Supports or magazines for piles from which articles are to be separated with means for advancing the articles to present the articles to the separating device comprising weights
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M13/00—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles
- F16M13/04—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles for supporting on, or holding steady relative to, a person, e.g. by chains, e.g. rifle butt or pistol grip supports, supports attached to the chest or head
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- General Engineering & Computer Science (AREA)
- Manipulator (AREA)
- Prostheses (AREA)
Description
以下、ここで説明した技術的特徴を非限定的に列挙する。
[技術的特徴1]
人体に結合されるように構成された腕部支持外骨格において、
人の胴体に結合されるように構成された肩部基部と、
前記肩部基部に連結される腕部リンク機構とを有し、
前記腕部リンク機構は、
前記人が直立しているときに、重力線と実質的に直交する第1回転軸に沿って回転ジョイントの周りに相互に回動するように構成された近位リンクおよび遠位リンクと、
前記人の上腕を前記遠位リンクに結合するように構成された少なくとも1つの腕部連結器と、
引張力発生器であって、当該引張力発生器の第1端部で前記近位リンクに連結され、前記引張力発生器の第2端部で前記遠位リンクに連結された前記引張力発生器と、
前記回転ジョイントに実質的に配置された突起とを有し、
前記遠位リンクがトグル角度を超えて延びるとき、前記突起は前記張力発生器を拘束し、前記張力発生器によって付与されるトルクは実質的に小さいままであり、
前記突起が前記張力発生器を拘束しないとき、前記トルクは、前記遠位リンクを前記近位リンクに対して撓ませる傾向があり、それによって前記人の前記上腕を引き上げるのに必要な前記人の肩の力およびトルクを低減することを特徴とする腕部支持外骨格。
[技術的特徴2]
人体に結合されるように構成された腕部支持外骨格において、
人の胴体に結合されるように構成された肩部基部と、
前記肩部基部に結合される腕部リンク機構とを有し、
前記腕部リンク機構は、
前記人が直立しているときに、重力線と実質的に直交する第1回転軸に沿って回転ジョイントの周りに相互に回動するように構成された近位リンクおよび遠位リンクと、
前記人の上腕を前記遠位リンクに結合するように構成された少なくとも1つの腕部連結器と、
引張力発生器であって当該引張力発生器の第1端部で前記近位リンクに結合され、前記引張力発生器の第2端部で前記遠位リンクに結合された前記引張力発生器とを有し、
前記腕部支持外骨格が前記人体に連結され、前記近位リンクと前記遠位リンクとの間の角度がトグル角度よりも小さいとき、前記トルクは、前記近位リンクに対して前記遠位リンクを撓ませる傾向があり、これによって前記人の上腕を持ち上げるために必要な前記人の肩部の力およびトルクを低減させ、前記肩部基部に反作用力およびトルクを加え、
前記近位リンクと前記遠位リンクとの間の前記角度が前記トグル角度より大きいとき、前記近位リンクと前記遠位リンクとの間に実質的に小さなトルクを付与し、前記人が前記人の前記上腕を自由に動かせるようにすることを特徴とする腕部支持外骨格。
[技術的特徴3]
人体に結合されるように構成された腕部支持外骨格において、
人の胴体に結合されるように構成された肩部基部と、
前記肩部基部に連結される腕部リンク機構とを有し、
前記腕部リンク機構は、
前記人が直立しているときに、重力線と実質的に直交する第1回転軸に沿って回転ジョイントの周りに相互に回動するように構成された近位リンクおよび遠位リンクと、
前記人の上腕を前記遠位リンクに結合するように適合された少なくとも1つの腕部連結器と、
前記近位リンクと前記遠位リンクとの間にトルクを生成するように構成された少なくとも1つのトルク発生器とを有し、
前記腕部支持外骨格が前記人体に連結され、前記近位リンクと前記遠位リンクとの間の角度がトグル角度よりも小さいとき、前記トルクは、前記近位リンクに対して前記遠位リンクを撓ませる傾向があり、これによって前記人の上腕を持ち上げるために必要な前記人の肩部の力およびトルクを低減させ、前記肩部基部に反作用力およびトルクを加え、
前記近位リンクと前記遠位リンクとの間の前記角度が前記トグル角度より大きいとき、前記近位リンクと前記遠位リンクとの間に実質的に小さなトルクを付与し、前記人が前記人の前記上腕を自由に動かせるようにすることを特徴とする腕部支持外骨格。
[技術的特徴4]
技術的特徴3に記載の腕部支持外骨格において、
前記肩部基部は、
前記肩部基部上の前記反作用力およびトルクを支持する、前記腕部リンク機構に結合された荷重担持構造と、
前記肩部基部が前記人の前記胴体胴と一体的に動くように、前記負荷暗示構造を前記人の前記胴体に結合するように構成された連結機構とを有する、前記腕部支持外骨格。
[技術的特徴5]
技術的特徴4に記載の腕部支持外骨格において、
前記荷重担持構造は、
前記腕部リンク機構に連結され、前記腕部リンク機構からの前記反作用力およびトルクの少なくとも一部を支持する背部フレームと、
前記背部フレームに結合された少なくとも1つの腰部装填ベルトであって、前前記背部から前記反力およびトルクの少なくとも一部を前記人の腰部に伝達する、前記腰部装填ベルトとを有する、前記腕部支持外骨格。
[技術的特徴6]
技術的特徴4に記載の腕部支持外骨格において、
前記荷重担持構造は、
前記人の背部の実質的に後方に位置付けられるように構成された背部フレームであって、前記腕部リンク機構に結合され、前記腕部リンク機構からの前記反作用力およびトルクの少なくとも一部を支持する、前記背部フレームと、
前記背部フレームおよび前記人の脚部に結合されるように構成された下肢外骨格であって、前記腕部リンク機構からの前記反作用力およびトルクの少なくとも一部を、前記人が直立している支持表面に伝達する、前記下肢外骨格とを有する、前記腕部支持外骨格。
[技術的特徴7]
技術的特徴5に記載の腕部支持外骨格において、
前記背部フレームは、
前記腕部リンク機構に結合された上側フレームと、
前記腰部装填ベルトに結合された下側フレームと、
脊柱フレームとを有し、
前記脊柱フレームは、当該脊柱フレームの上端で前記上側フレームに結合され、当該脊柱フレームの下端で前記下側フレームに回転可能に結合され、前記上側フレームが前記下側フレームに対して前記人の前面平面において回動可能である、前記腕部支持外骨格。
[技術的特徴8]
技術的特徴5に記載の腕部支持外骨格において、
前記背部フレームは、
前記腕部リンク機構に結合された上側フレームと、
前記腰部装填ベルトに結合された下側フレームと、
脊柱フレームとを有し、
前記脊柱フレームは、当該脊柱フレームの下端で前記下側フレームに結合され、当該脊柱フレームの上端で前記上側フレームに回転可能に結合され、前記上側フレームが前記下側フレームに対して前記脊柱フレームの主軸に沿って回動可能である、前記腕部支持外骨格。
[技術的特徴9]
技術的特徴4に記載の腕部支持外骨格において、
前記連結機構は、
前記人の胸部を少なくとも部分的に包囲するように構成され、前記人の実質的に後方の位置において前記上側フレームに結合される胸部ストラップと、
前記胸部ストラップを前記人の対応する肩部を越えて前記上側フレームに結合するように適合化された第1および第2のアンカーストラップとを有し、
前記胸部ストラップおよび前記第1および第2のアンカーストラップを前記上側フレームに結合することによって前記上側フレームが前記人の前記胸部および前記化t部と一体的に動くことができる、前記腕部支持外骨格。
[技術的特徴10]
技術的特徴4に記載の腕部支持外骨格において、
前記連結機構は、前記肩部基部を前記人に連結させるように適合化された第1および第2の肩部ストラップを有する、前記腕部支持外骨格。
[技術的特徴11]
技術的特徴3に記載の腕部支持外骨格において、
前記トルク発生器は、引張力発生器を有し、当該引張力発生器は、当該引張力発生器の第1端部からの前記近位リンクに結合され、当該引張力発生器の第2端部からの前記遠位リンクに結合され、前記引張力発生器における引張力が、前記遠位リンクを前記近位リンクに対して屈曲させるトルクを形成する、前記腕部支持外骨格。
[技術的特徴12]
技術的特徴11に記載の腕部支持外骨格において、
前記回転ジョイントに実質的に位置付けられる突起をさらに有し、
前記遠位リンクが前記トグル角度を越えて伸びるときに、前記突起が、前記引張力発生器を拘束して、前記引張力発生器による付与されるトルクが実質的に小さなままに維持されるようにする、前記腕部支持外骨格。
[技術的特徴13]
技術的特徴11に記載の腕部支持外骨格において、
前記近位リンクの配位が、前記肩部基部に対して、前記第1回転軸に実質的に平行な軸に沿って、調整され、その位置に維持でき、前記トグル角度の位置を前記肩部基部に対して調整できる、前記腕部支持外骨格。
[技術的特徴14]
技術的特徴11に記載の腕部支持外骨格において、
前記近位リンクは前記引張力発生器に結合された上側ブラケットを有し、前記上側ブラケットの位置が前記近位リンクに沿って調整可能であって前記引張力発生器により付与される前記トルクを調整する、前記腕部支持外骨格。
[技術的特徴15]
技術的特徴11に記載の腕部支持外骨格において、
前記遠位リンクは前記引張力発生器に結合された下側ブラケットを有し、前記下側ブラケットの位置が前記遠位リンクに沿って調整可能であって前記引張力発生器の前置荷重力を調整する、前記腕部支持外骨格。
[技術的特徴16]
技術的特徴3に記載の腕部支持外骨格において、
前記腕部リンク機構は、少なくとも1つの水平回転ジョイントを拘束し、前記水平回転ジョイントは、前記人の肩関節を実質的に通り抜ける、前記第1回転軸と実質的に直行する第2回転軸の周りに、前記近位リンクを、前記肩部基部に対して回動させることができる、前記腕部支持外骨格。
[技術的特徴17]
技術的特徴3に記載の腕部支持外骨格において、
前記肩部基部は、少なくとも1つの肩部ブラケットを有し、前記肩部ブラケットは、前記腕部リンク機構を前記肩部基部に迅速に着脱することができる、前記腕部支持外骨格。
[技術的特徴18]
技術的特徴3に記載の腕部支持外骨格において、
前記肩部基部は、少なくとも1つの肩部ブラケットを有し、前記肩部ブラケットは、前記腕部リンク機構の位置を前記肩部基部に対して調整できる態様で、前記腕部リンク機構を前記肩部基部に結合する、前記腕部支持外骨格。
[技術的特徴19]
技術的特徴3に記載の腕部支持外骨格において、
前記腕部リンク機構は、少なくとも1つの回転ジョイントを拘束し、前記回転ジョイントは、重力繊維実質的に著効する少なくとも1つの肩甲骨回転軸に沿って上記近位リンクを前記肩部基部に対して回動可能にする、前記腕部支持外骨格。
[技術的特徴20]
技術的特徴3に記載の腕部支持外骨格において、
前記肩部基部は、少なくとも1つの肩部ブラケットを有し、前記肩部ブラケットは、前記肩部基部に回転可能に結合され、前記腕部リンクに結合され、前記肩部ブラケット格納軸に沿って回転し、静止状態に維持可能であり、前記人の作業空間の実質的な外部である、前記人の後方に前記腕部リンク機構を収容できる、前記腕部支持外骨格。
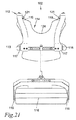
102 肩部基部
104 腕部リンク機構
106 腕部連結器
108 トルク発生器
112 荷重担持構造
114 連結機構
115 ベルト取付点
116 ベルト
117 背中中央取付点
118 胸部ストラップ
119 アンカーストラップ
120 肩部ストラップ
121 上方腹側取付点
122 胸骨ストラップ
123 下方背側取付点
124 ベスト
125 ベスト取付点
126 安全ハーネス
127 安全ハーネス取付点
128 ハンモック
130 背部フレーム
131 腰部装填ベルト
134 脊柱フレーム
135 脊柱フレーム軸
136 上側フレーム
138 下側フレーム
140 下側コーナーバー
142 上側中央バー
144 下側中央バー
146 上側コーナーバー
148 上側サイドブラケット
149 下側サイドブラケット
150 近位リンク
152 遠位リンク
153 肩部ブラケット
156 水平回転ジョイント
158 格納ジョイント
159 オフセット調整ジョイント
160 荷重担持連結器
162 腕部連結機構
164 腕部回転ジョイント
165 腕部カフス部回転軸
166 並進ジョイント
167 遠位リンクアタッチメント
168 腕部カフス部
169 ロックピン
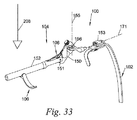
171 肩甲骨回転軸
172 内外回転ジョイント
173 内外回転軸
178 引張力発生器
179 接合部
180 コイルバネ要素
182 線条要素
183 プーリ
186 突起
187 上側ブラケットネジ
188 上側ブラケット
189 下側ブラケットネジ
190 下側ブラケット
191 近位リンクオフセット位置
193 第1角度
194 トグル位置
195 トグル角度
197 中立ゾーン
198 腕部重量トルクプロファイル
199 オフセット角度
200 人
202 胴体
204 上腕
206 前腕
207 手
208 重力線
209 水平線
212 支持力
214 反作用力
215 反作用トルク
218 肩関節
220 腰部
221 腰部反作用力
222 胸部
224 肩部
225 肩部反作用力
228 脚部
230 作業空間
232 胴高さ
234 腰幅
236 肩幅
238 腰深さ
250 正面平面
260 中外側屈曲動作
276 引張力発生器有効長
280 印加トルク
302 外骨格
304 下肢外骨格
308 ツール
310 地面
311 地面反作用力
Claims (16)
- 腕部支持外骨格において、
人の上腕に連結されるように構成された腕部リンク機構を有し、
上記腕部リンク機構は、
近位リンクと、
第1回転軸の周りで上記近位リンクに対して回転するように構成される遠位リンクと、
上記遠位リンクに取り付けられ、上記人の上記上腕を上記遠位リンクに連結するように適合化された少なくとも1つの腕部カプラと、
上記近位リンクと上記遠位リンクとに結合され、上記近位リンクと上記遠位リンクとの間にトルクを発生させるように構成された少なくとも1つのトルク発生器と、
実質的に上記第1回転軸の回転ジョイントに位置し、上記少なくとも1つのトルク発生器を拘束するように構成された突起とを有し、
上記近位リンクと上記遠位リンクとの間の角度がトグル角度より小さいとき、上記少なくとも1つのトルク発生器により上記近位リンクと上記遠位リンクとの間に発生させられるトルクが、第1のトルクモードのトルクか、またはそれを越えている状態を維持し、
上記近位リンクと上記遠位リンクとの間の角度がトグル角度より大きいとき、上記少なくとも1つのトルク発生器により上記近位リンクと上記遠位リンクとの間に発生させられるトルクが、第2のトルクモードのトルクか、またはそれを下回っている状態を維持することを特徴とする腕部支持外骨格。 - 上記少なくとも1つのトルク発生器が引張力発生器を有し、上記引張力発生器が、第1端部と第2端部とを有し、上記引張力発生器が当該引張力発生器の上記第1端部において上記近位リンクに結合され、当該引張力発生器の上記第2端部において上記遠位リンクに結合され、
上記引張力発生器における引張力がトルクを発生させて上記遠位リンクを上記近位リンクに対して屈曲させる請求項1記載の腕部支持外骨格。 - 上記引張力発生器は、コイルばね要素と、上記コイルばね要素を上記近位リンクに連結する線要素と、上記遠位リンクに結合されたプーリーとを有し、上記線要素が上記近位リンクに連結される前に、上記線要素は上記プーリーを少なくとも部分的に取り囲む請求項2に記載の腕部支持外骨格。
- 上記近位リンクは、上記少なくとも1つのトルク発生器に連結された上部ブラケットを有し、上記上部ブラケットの位置は、上記少なくとも1つのトルク発生器によって付与されるトルクを調整するために上記近位リンクに沿って調整可能である請求項1に記載の腕部支持外骨格。
- 上記遠位リンクが、上記少なくとも1つのトルク発生器に結合された下部ブラケットを有し、上記下部ブラケットの位置が上記少なくとも1つのトルク発生器によって付与されるトルクを調節するために上記遠位リンクに沿って調節可能である請求項1に記載の腕部支持外骨格。
- 上記少なくとも1つの腕部カプラが、上記遠位リンクに結合され、かつ上記人の上記上腕に上向きの力を加えることができる耐荷重カプラを有する請求項1に記載の腕部支持外骨格。
- 上記腕部リンク機構が上記人の上記上腕に連結されたときに、上記第1回転軸が上記人の関節窩上腕関節をほぼ通る、請求項1に記載の腕部支持外骨格。
- 上記第1回転軸と実質的に直交する第2回転軸の周りに作用する少なくとも1つの水平回転ジョイントをさらに有する請求項1に記載の腕部支持外骨格。
- さらに、上記腕部リンク機構に結合されるように構成され、さらに上記人の体幹に結合されるように構成された肩部基部を有し、上記少なくとも1つのトルク発生器によって発生されたトルクが上記第1のトルクモードまたはそれを上回る状態のままであるとき、上記少なくとも1つの腕部カプラによって上記人の上記上腕に力が加えられ、反力およびトルクが肩部基部に加えられ、これによって、上記人の上記上腕を上げるために必要な人間の肩の力とトルクを減らし、かつ、上記少なくとも1つのトルク発生器によって発生されたトルクが上記第2のトルクモードまたはそれを下回る状態のままであるとき、上記人は自由に上記上腕を動かすことができる請求項1に記載の腕部支持外骨格。
- 上記肩部基部が、上記腕部リンク機構を上記肩部基部に迅速に接続および切断するように動作可能な少なくとも1つの肩部ブラケットをさらに有する、請求項9に記載の腕部支持外骨格。
- 上記肩部基部は、
上記腕部リンク機構に結合されるように構成され、上記肩部基部に加えられる反力およびトルクを支持するようにさらに構成される、耐荷重構造体と、
上記肩部基部が上記人の上記体幹と一致して動くように動作可能であるように、上記耐荷重構造体を上記人の上記体幹に結合するように構成された結合機構とをさらに有する請求項9に記載の腕部支持外骨格。 - 上記耐荷重構造体は、
実質的に上記人の背中の後ろに位置するように構成された背中フレームと、
少なくとも1つの腰部負荷ベルトとを有し、
上記背中フレームは上部フレームと下部フレームとを有し、
さらに、上記上部フレームは上記腕部リンク機構に結合され、上記腕部リンク機構から上記肩部基部に加えられる反力およびトルクの少なくとも一部を支持するように構成され、上記下部フレームは上記上部フレームに結合され、上記上部フレームに加えられる上記反力および上記トルクの少なくとも一部を支持するように構成され、
上記少なくとも1つの腰部負荷ベルトは、上記下部フレームに連結されて、上記少なくとも1つの腰部負荷ベルトは、上記反力および上記トルクの少なくとも一部を上記背中フレームから上記人の腰に伝達するように構成されている請求項11記載の腕部支持外骨格。 - 上記下部フレームに対する上記上部フレームの位置は、上記人の胴の高さに対応するように上記人の背骨に実質的に平行な軸に沿って調整可能である、請求項12に記載の腕部支持外骨格。
- 上記肩部基部が、体幹支持外骨格に結合されるように構成されている、請求項9に記載の腕部支持外骨格。
- 上記肩部基部が、脚部支持外骨格に連結されるように構成されている、請求項9に記載の腕部支持外骨格。
- 少なくとも1つの安全ハーネス取り付け点をさらに含み、上記肩部基部は、上記安全ハーネス取り付け点を使用して、上記人が着用する安全ハーネスに結合するように適合可能である、請求項9に記載の腕部支持外骨格。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562162871P | 2015-05-18 | 2015-05-18 | |
| US62/162,871 | 2015-05-18 | ||
| PCT/US2016/033035 WO2016187275A1 (en) | 2015-05-18 | 2016-05-18 | Method and apparatus for human arm supporting exoskeleton |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018520011A JP2018520011A (ja) | 2018-07-26 |
| JP2018520011A5 JP2018520011A5 (ja) | 2019-07-18 |
| JP6673940B2 true JP6673940B2 (ja) | 2020-04-01 |
Family
ID=57320719
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017559672A Active JP6673940B2 (ja) | 2015-05-18 | 2016-05-18 | 腕部支持外骨格 |
Country Status (6)
| Country | Link |
|---|---|
| US (4) | US9889554B2 (ja) |
| EP (2) | EP4218685A3 (ja) |
| JP (1) | JP6673940B2 (ja) |
| KR (1) | KR102312527B1 (ja) |
| CN (1) | CN107835675B (ja) |
| WO (1) | WO2016187275A1 (ja) |
Families Citing this family (96)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4218685A3 (en) | 2015-05-18 | 2023-09-13 | The Regents of the University of California | Method and apparatus for human arm supporting exoskeleton |
| US10639785B2 (en) * | 2015-05-18 | 2020-05-05 | The Regents Of The University Of California | Variable force generators for arm supporting exoskeletons |
| TWI600421B (zh) * | 2016-01-05 | 2017-10-01 | 國立成功大學 | 肩關節復健輔具 |
| DE102016122282A1 (de) | 2016-11-18 | 2018-05-24 | Helmut-Schmidt-Universität Universität der Bundeswehr Hamburg | System und verfahren zur reduktion von auf eine wirbelsäule wirkenden kräften |
| DE102016123153A1 (de) | 2016-11-30 | 2018-05-30 | Helmut-Schmidt-Universität Universität der Bundeswehr Hamburg | Vorrichtung und verfahren zur muskelkraftunterstützung |
| DE102016123797A1 (de) * | 2016-12-08 | 2018-06-14 | Bayerische Motoren Werke Aktiengesellschaft | Exoskelett |
| AU2017375795A1 (en) * | 2016-12-13 | 2019-07-11 | Abilitech Medical, Inc. | Upper torso augmentation system and method |
| WO2018131686A1 (ja) * | 2017-01-13 | 2018-07-19 | 株式会社 東芝 | 動作支援装置 |
| CN106625613A (zh) * | 2017-02-28 | 2017-05-10 | 深圳龙海特机器人科技有限公司 | 前支撑穿戴式辅助搬运装置 |
| CN110997245A (zh) * | 2017-03-08 | 2020-04-10 | 艾比力泰克医疗公司 | 上躯干增强系统和方法 |
| JP2018149624A (ja) * | 2017-03-13 | 2018-09-27 | パナソニック株式会社 | 動作支援装置 |
| US10918559B2 (en) * | 2017-04-25 | 2021-02-16 | Ossur Iceland Ehf | Interface system in an exoskeleton |
| FR3065387A1 (fr) * | 2017-04-25 | 2018-10-26 | Pierre Davezac | Exosquelette a energie passive et collaboratif |
| KR101896181B1 (ko) * | 2017-04-25 | 2018-09-07 | 서울대학교산학협력단 | 어깨 움직임 보조 기구 |
| EP3624996A4 (en) * | 2017-05-15 | 2021-03-24 | Enhance Technologies, LLC | ARM SUPPORT SYSTEMS |
| JP7017064B2 (ja) * | 2017-05-26 | 2022-02-08 | 株式会社ジェイテクト | アシスト装置 |
| DE102017112436B4 (de) | 2017-06-06 | 2019-05-29 | Ottobock Se & Co. Kgaa | Vorrichtung zum Unterstützen wenigstens eines Armes eines Benutzers |
| US11412789B2 (en) * | 2017-06-13 | 2022-08-16 | Numan Zeidan | Motorcycle safety harness with shock absorbers and cushions |
| CN107397647B (zh) * | 2017-06-23 | 2019-10-01 | 上海理工大学 | 肘关节动力辅助训练装置 |
| CN107187787A (zh) * | 2017-07-19 | 2017-09-22 | 深圳龙海特机器人科技有限公司 | 一体式胸托与胸部支撑装置 |
| JP6895335B2 (ja) * | 2017-07-28 | 2021-06-30 | パナソニック株式会社 | 動作支援装具 |
| RU181515U1 (ru) * | 2017-09-06 | 2018-07-17 | Евгений Михайлович Дудиков | Устройство для восстановления движений в верхней конечности |
| US11000439B2 (en) | 2017-09-28 | 2021-05-11 | Ossur Iceland Ehf | Body interface |
| EP3482883B1 (en) * | 2017-11-13 | 2022-10-05 | Free Bionics Taiwan Inc. | Exoskeleton robot |
| US10835444B2 (en) | 2017-11-13 | 2020-11-17 | Free Bionics Taiwan Inc. | Shoe assembly for a walking assist device |
| FR3076237B1 (fr) * | 2017-12-28 | 2021-02-19 | Safran Electronics & Defense | Structure d'exosquelette |
| KR101989274B1 (ko) * | 2018-03-16 | 2019-09-30 | 이권우 | 팔지지 기구 |
| US10966893B2 (en) * | 2018-03-23 | 2021-04-06 | Hiwin Technologies Corp. | Exoskeleton apparatus for limb rehabilitation |
| US10765581B2 (en) * | 2018-03-27 | 2020-09-08 | Dephy, Inc. | Spool for winch actuator |
| DE102018108416A1 (de) | 2018-04-10 | 2019-10-10 | Ottobock Se & Co. Kgaa | Vorrichtung zum Unterstützen wenigstens eines Armes |
| EP3575042A1 (en) * | 2018-05-29 | 2019-12-04 | Vrije Universiteit Brussel | Device comprising input and output pulleys on nonparallel or parallel and mutually hingeable axes |
| CN108527336B (zh) * | 2018-06-22 | 2023-09-22 | 北京建筑大学 | 同步外骨骼机械臂 |
| DE102018119754A1 (de) * | 2018-08-14 | 2020-02-20 | Ottobock Se & Co. Kgaa | Vorrichtung zum Unterstützen wenigstens eines Armes eines Benutzers |
| DE102018119755A1 (de) * | 2018-08-14 | 2020-02-20 | Ottobock Se & Co. Kgaa | Vorrichtung zum Unterstützen wenigstens eines Armes eines Benutzers |
| CN108789382B (zh) * | 2018-08-21 | 2024-04-26 | 迈宝智能科技(苏州)有限公司 | 一种便携式上肢助力无源外骨骼机器人 |
| US12090106B2 (en) * | 2018-08-22 | 2024-09-17 | Exoiq Gmbh | System and method for the reduction of forces acting on an arm of a human |
| FR3085292B1 (fr) * | 2018-08-29 | 2020-11-27 | Human Mechanical Tech | Exosquelette adapte a generer un effort de compensation d’intensite variable en fonction de la position d’un membre superieur d’un utilisateur |
| CN108839003A (zh) * | 2018-09-04 | 2018-11-20 | 赤源动力(大连)科技有限责任公司 | 穿戴式外骨骼肩部助力设备用穿戴装置 |
| CN108927792B (zh) * | 2018-09-25 | 2023-08-08 | 电子科技大学中山学院 | 穿戴式助力机械手装置 |
| JP2020059092A (ja) * | 2018-10-10 | 2020-04-16 | トヨフレックス株式会社 | 動作補助装置 |
| CN109333505A (zh) * | 2018-10-22 | 2019-02-15 | 江苏集萃微纳自动化系统与装备技术研究所有限公司 | 一种穿戴于背部的上肢支撑固定装置 |
| KR20200050001A (ko) | 2018-10-30 | 2020-05-11 | 삼성전자주식회사 | 운동 보조 장치 |
| DE102018127553B4 (de) * | 2018-11-05 | 2020-11-05 | Ottobock Se & Co. Kgaa | Vorrichtung zum Unterstützen wenigstens eines Armes eines Benutzers |
| CN109363811B (zh) * | 2018-11-15 | 2021-07-13 | 上海理工大学 | 一种基于轮椅的上肢外骨骼机器人 |
| KR102603041B1 (ko) | 2018-12-12 | 2023-11-16 | 현대자동차주식회사 | 착용식 근력 보조 장치 |
| JP2020092961A (ja) * | 2018-12-14 | 2020-06-18 | 株式会社ダイドー | 高所作業支援器具 |
| CN109318217A (zh) * | 2018-12-20 | 2019-02-12 | 赤源动力(大连)科技有限责任公司 | 可提高舒适性的穿戴式肩部助力外骨骼 |
| JP2020120585A (ja) * | 2019-01-29 | 2020-08-13 | 大栄産業株式会社 | アームアシスト |
| US11413865B2 (en) | 2019-02-06 | 2022-08-16 | Hewlett-Packard Development Company, L.P. | Fluid ejection devices including contact pads |
| KR102660352B1 (ko) * | 2019-02-19 | 2024-04-24 | 현대자동차주식회사 | 착용식 근력 보조 장치 |
| US10765911B1 (en) | 2019-03-01 | 2020-09-08 | Dustin Hamoy | Core exercise assembly |
| KR102142578B1 (ko) * | 2019-04-04 | 2020-08-10 | 현대자동차(주) | 착용식 장치의 결합 구조 |
| KR102681476B1 (ko) * | 2019-04-04 | 2024-07-04 | 현대자동차주식회사 | 착용식 근력 보조 장치 |
| KR102142570B1 (ko) * | 2019-04-04 | 2020-08-10 | 현대자동차(주) | 착용식 근력 보조 장치의 상완 모듈 및 이를 포함한 착용식 근력 보조 장치 |
| KR102663601B1 (ko) * | 2019-04-04 | 2024-05-08 | 현대자동차주식회사 | 착용식 근력 보조 장치의 상완 모듈 및 이를 포함한 착용식 근력 보조 장치 |
| KR20210144841A (ko) * | 2019-04-05 | 2021-11-30 | 이노피스 씨오., 엘티디. | 완부 보조 장치 |
| EP3952795A4 (en) | 2019-04-10 | 2022-12-28 | Abilitech Medical, Inc. | UPPER TORSO WEARABLE ORTHOTIC DEVICE WITH DYNAMIC LEVELING SYSTEM |
| FR3095608B1 (fr) * | 2019-05-03 | 2021-06-11 | Fm France Sas | Dispositif d’assistance physique non robotisé/non motorisé de type exosquelette pour le transport manuel de charges |
| DE102019113684A1 (de) * | 2019-05-22 | 2020-11-26 | Ottobock Se & Co. Kgaa | Vorrichtung zum Unterstützen wenigstens eines Armes |
| CN110181485A (zh) * | 2019-06-25 | 2019-08-30 | 知因(台州)机器人科技有限公司 | 人体上半身外骨骼 |
| CN110787024B (zh) * | 2019-06-26 | 2021-07-20 | 东南大学 | 一种采用无动力补偿关节的肩关节康复外骨骼机构 |
| WO2021003441A1 (en) * | 2019-07-02 | 2021-01-07 | Enhance Technologies, LLC | Integrated fall-protection harnesses and exoskeletons and methods for use |
| JP6630898B1 (ja) * | 2019-07-05 | 2020-01-15 | 太陽パーツ株式会社 | トルク調整ユニットおよびサポートウェア |
| CN110340870B (zh) * | 2019-07-08 | 2021-04-20 | 华中科技大学 | 一种肩关节保持外骨骼及其应用 |
| CN110434841B (zh) * | 2019-09-16 | 2024-08-20 | 深圳市迈步机器人科技有限公司 | 一种助力外骨骼装置 |
| EP3795306A1 (de) * | 2019-09-23 | 2021-03-24 | Hilti Aktiengesellschaft | Vorrichtung zur bereitstellung einer unterstützungskraft für die oberen extremitäten eines nutzers sowie ein exoskelett |
| EP4054504A1 (en) * | 2019-11-04 | 2022-09-14 | Ossur Iceland Ehf | Interface for an exoskeleton |
| KR20210065278A (ko) * | 2019-11-26 | 2021-06-04 | 현대자동차주식회사 | 착용식 근력 보조 장치 |
| FR3105056B1 (fr) * | 2019-12-20 | 2023-09-08 | Commissariat Energie Atomique | Equilibreur de charge passif |
| WO2021155079A1 (en) * | 2020-01-30 | 2021-08-05 | Abilitech Medical, Inc. | Hybrid spring and mass counterbalancing orthotic |
| WO2021188950A1 (en) | 2020-03-19 | 2021-09-23 | U.S. Bionics Inc. (DBA: suitX) | Remote center shoulder joint for shoulder supporting exoskeleton |
| CN111360790B (zh) * | 2020-03-26 | 2023-04-14 | 哈尔滨工业大学 | 一种气弹簧储能被动型上肢助力外骨骼 |
| DE102020206806A1 (de) | 2020-05-29 | 2021-12-02 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Arm-Unterstützungsmechanismus |
| RU202453U1 (ru) * | 2020-06-11 | 2021-02-18 | Общество с ограниченной ответственностью "Экзомед" | Пассивный экзоскелет верхних конечностей |
| US10941274B1 (en) | 2020-09-01 | 2021-03-09 | King Abdulaziz University | Nanoparticle-infused ABS filament for 3D-printed materials and uses for neutron detection and discrimination |
| KR20220069648A (ko) * | 2020-11-20 | 2022-05-27 | 현대자동차주식회사 | 근력 보조 장치 |
| CN112706150B (zh) * | 2020-12-17 | 2022-06-07 | 武汉大学 | 一种可穿戴的外肢体辅助抓取装置及控制方法 |
| CN113146577A (zh) * | 2021-03-03 | 2021-07-23 | 上海冉擎机械设备有限公司 | 上肢外骨骼机器人 |
| DE102021202433B3 (de) | 2021-03-12 | 2022-09-01 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Extremitätenunterstützungsvorrichtung und Verfahren zum Heben, Halten und/oder Tragen einer Last und/oder zum Ausführen von Überkopftätigkeiten |
| EP4067009B1 (de) | 2021-03-31 | 2023-09-06 | Ottobock SE & Co. KGaA | Vorrichtung zum unterstützen wenigstens eines oberarms |
| DE102021130308A1 (de) * | 2021-11-19 | 2023-05-25 | German Bionic Systems Gmbh | Exoskelett mit einer automatischen Stelleinheit zur Größenverstellung und dazugehörige Verfahren |
| WO2022219119A1 (de) * | 2021-04-16 | 2022-10-20 | German Bionic Systems Gmbh | Schnellkupplung für ein exoskelett und exoskelettsystem mit einer schnellkupplung |
| KR102513696B1 (ko) * | 2021-07-15 | 2023-03-27 | 한국조선해양 주식회사 | 상지 근력 보조장치 |
| KR20240046723A (ko) * | 2021-07-19 | 2024-04-09 | 레비테이트 테크놀로지스, 인코포레이티드 | 가요성 외골격 프레임과 팔 지지 시스템 및 이를 사용하는 방법 |
| DE102021208905A1 (de) * | 2021-08-13 | 2023-02-16 | Festool Gmbh | Exoskelett und Verfahren |
| USD1011398S1 (en) | 2021-08-13 | 2024-01-16 | Festool Gmbh | Wearable robotic exoskeleton |
| US12083369B2 (en) * | 2021-08-20 | 2024-09-10 | John-Thomas Cameron | Handsfree, body-mounted apparatus for supporting high-pressure hoses |
| WO2023038553A1 (ru) * | 2021-09-13 | 2023-03-16 | Общество С Ограниченной Ответственностью "Экзаурус" | Носимый механизм для поддержки рук пользователя |
| WO2023038550A1 (ru) * | 2021-09-13 | 2023-03-16 | Общество С Ограниченной Ответственностью "Экзаурус" | Носимое устройство для поддержки рук пользователя |
| HUE066120T2 (hu) | 2021-10-26 | 2024-07-28 | Gesnaer Consulting Slne | Érzékelõs exoszkeleton rendszer |
| EP4426519A1 (en) * | 2021-11-03 | 2024-09-11 | Levitate Technologies, Inc. | Arm support systems and methods for using them |
| DE102022100205A1 (de) * | 2022-01-05 | 2023-07-06 | J.Schmalz Gmbh | Anziehbare Hilfsvorrichtung mit verstellbarer unterer Körperanbindung |
| DE102022100206A1 (de) * | 2022-01-05 | 2023-07-06 | J.Schmalz Gmbh | Anziehbare Hilfsvorrichtung mit verstellbarer oberer Körperanbindung |
| CN114851165A (zh) * | 2022-05-06 | 2022-08-05 | 湖南固工机器人有限公司 | 一种无源手臂助力外骨骼 |
| WO2024079632A1 (en) * | 2022-10-10 | 2024-04-18 | Iuvo S.R.L | Torque generator device |
| WO2024184299A1 (en) * | 2023-03-06 | 2024-09-12 | Auxivo Ag | Shoulder exoskeleton |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE32213E (en) * | 1974-09-16 | 1986-07-22 | Equipment for use with hand held motion picture cameras | |
| US4298149A (en) * | 1978-01-17 | 1981-11-03 | Panavision, Incorporated | Body harness for cinematographer |
| US5111983A (en) * | 1986-02-10 | 1992-05-12 | Simmons Elex M | Camera stabilizing device |
| FR2611855B1 (fr) * | 1987-03-03 | 1989-07-13 | Spianti Dany | Support d'equipement portatif, notamment de camera |
| US5042763A (en) * | 1990-01-05 | 1991-08-27 | Wong William W M | Self-leveling portable camera support apparatus |
| KR100299210B1 (ko) * | 1999-03-12 | 2001-09-22 | 박호군 | 인간팔 장착형 힘 재현기능을 갖는 마스터 장치 |
| US6821259B2 (en) | 2001-07-30 | 2004-11-23 | The Nemours Foundation | Orthosis device |
| US6764231B1 (en) * | 2003-01-28 | 2004-07-20 | Cory Shubert | Body mounted camera support |
| US7628766B1 (en) | 2003-10-29 | 2009-12-08 | The Regents Of The University Of California | Lower extremity enhancer |
| CA2601220C (en) | 2005-01-18 | 2014-03-18 | The Regents Of The University Of California | Lower extremity exoskeleton |
| US7325777B2 (en) | 2005-02-18 | 2008-02-05 | Gordon Daniel Thiessen | Portable articulating tool support |
| PL1874239T3 (pl) | 2005-04-13 | 2014-10-31 | Univ California | Pół-wspomagany egzoszkielet kończyny dolnej |
| CN101287945B (zh) | 2005-04-15 | 2012-01-25 | 加勒特·W·布朗 | 平衡支撑装置 |
| AU2008293511B2 (en) * | 2007-08-30 | 2016-02-18 | Garrett W. Brown | Articulated human arm support |
| WO2010019300A1 (en) | 2008-05-20 | 2010-02-18 | University Of California At Berkeley | Device and method for decreasing oxygen consumption of a person during steady walking by use of a load-carrying exoskeleton |
| US8945028B2 (en) | 2008-05-20 | 2015-02-03 | Ekso Bionics, Inc. | Device and method for decreasing energy consumption of a person by use of a lower extremity exoskeleton |
| AU2009341585B2 (en) * | 2008-12-18 | 2015-06-18 | Ekso Bionics, Inc. | Wearable material handling system |
| KR101572852B1 (ko) * | 2010-01-06 | 2015-12-01 | 삼성전자 주식회사 | 팔 보조 장치 |
| US9333644B2 (en) * | 2010-04-09 | 2016-05-10 | Lockheed Martin Corporation | Portable load lifting system |
| WO2012006087A1 (en) | 2010-06-28 | 2012-01-12 | The Regents Of The University Of California | Method and apparatus for human trunk support device |
| EP2616115B1 (en) * | 2010-09-17 | 2016-08-24 | Ekso Bionics | Human machine interface for human exoskeleton |
| US8591441B2 (en) * | 2010-10-22 | 2013-11-26 | Peter M. Bonutti | Shoulder orthosis including flexion/extension device |
| EP2665449B1 (en) | 2011-01-18 | 2017-11-15 | Levitate Technologies, Inc. | Adaptive arm support systems and methods for use |
| US9719633B2 (en) | 2011-05-06 | 2017-08-01 | Garrett W. Brown | Exoskeleton arm interface |
| US9022956B2 (en) | 2011-06-10 | 2015-05-05 | U.S. Bionics, Inc. | Trunk supporting exoskeleton and method of use |
| WO2013158490A1 (en) * | 2012-04-15 | 2013-10-24 | Brown Garrett W | Lifting extension mount assembly for equipoising arms |
| ITPI20120069A1 (it) * | 2012-06-11 | 2013-12-12 | Scuola Superiore S Anna | Esoscheletro per l¿interazione fisica con l¿uomo |
| ES2671971T3 (es) * | 2012-12-11 | 2018-06-11 | Enhance Technologies, LLC | Sistemas de soporte de brazo adaptativos y métodos de uso |
| EP4218685A3 (en) | 2015-05-18 | 2023-09-13 | The Regents of the University of California | Method and apparatus for human arm supporting exoskeleton |
-
2016
- 2016-05-18 EP EP22211811.9A patent/EP4218685A3/en active Pending
- 2016-05-18 KR KR1020177036315A patent/KR102312527B1/ko active IP Right Grant
- 2016-05-18 EP EP16797199.3A patent/EP3297579B1/en active Active
- 2016-05-18 WO PCT/US2016/033035 patent/WO2016187275A1/en active Application Filing
- 2016-05-18 US US15/158,113 patent/US9889554B2/en active Active
- 2016-05-18 JP JP2017559672A patent/JP6673940B2/ja active Active
- 2016-05-18 CN CN201680041052.0A patent/CN107835675B/zh active Active
-
2017
- 2017-12-20 US US15/848,487 patent/US10124485B2/en active Active
- 2017-12-20 US US15/848,409 patent/US10071477B2/en active Active
-
2018
- 2018-10-11 US US16/157,417 patent/US10369690B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9889554B2 (en) | 2018-02-13 |
| CN107835675A (zh) | 2018-03-23 |
| US20180111263A1 (en) | 2018-04-26 |
| KR102312527B1 (ko) | 2021-10-14 |
| CN107835675B (zh) | 2021-03-05 |
| US20180111262A1 (en) | 2018-04-26 |
| US20190039234A1 (en) | 2019-02-07 |
| JP2018520011A (ja) | 2018-07-26 |
| US10071477B2 (en) | 2018-09-11 |
| EP4218685A3 (en) | 2023-09-13 |
| EP3297579B1 (en) | 2022-12-07 |
| US10369690B2 (en) | 2019-08-06 |
| WO2016187275A1 (en) | 2016-11-24 |
| KR20180053276A (ko) | 2018-05-21 |
| EP3297579A4 (en) | 2019-03-06 |
| US20160339583A1 (en) | 2016-11-24 |
| EP3297579A1 (en) | 2018-03-28 |
| US10124485B2 (en) | 2018-11-13 |
| EP4218685A2 (en) | 2023-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6673940B2 (ja) | 腕部支持外骨格 | |
| US10994409B2 (en) | Arm supporting exoskeleton with a variable force generator | |
| KR102408473B1 (ko) | 사용자의 양 팔을 지지하기 위한 장치 | |
| JP6894467B2 (ja) | 適応的腕支持システムおよび使用方法 | |
| US10391627B2 (en) | Arm supporting exoskeleton with a variable force generator | |
| JP2018520011A5 (ja) | ||
| KR20240029875A (ko) | 작업자용 보조기 | |
| CN214285780U (zh) | 一种可调节穿戴式助力机械外骨骼 | |
| US12090106B2 (en) | System and method for the reduction of forces acting on an arm of a human | |
| JP6360416B2 (ja) | 肩痛緩和装具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190517 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190517 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190612 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20190612 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190719 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191028 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200305 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6673940 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |