KR20210144841A - 완부 보조 장치 - Google Patents
완부 보조 장치 Download PDFInfo
- Publication number
- KR20210144841A KR20210144841A KR1020217034982A KR20217034982A KR20210144841A KR 20210144841 A KR20210144841 A KR 20210144841A KR 1020217034982 A KR1020217034982 A KR 1020217034982A KR 20217034982 A KR20217034982 A KR 20217034982A KR 20210144841 A KR20210144841 A KR 20210144841A
- Authority
- KR
- South Korea
- Prior art keywords
- arm
- human body
- wearer
- support
- upper arm
- Prior art date
Links
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/106—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/14—Programme-controlled manipulators characterised by positioning means for manipulator elements fluid
- B25J9/144—Linear actuators
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
본 발명은, 장착자의 작업성을 향상시킨 완부 보조 장치를 제공한다. 완부 보조 장치(10)를, 상완의 측방측에 배치된 부재 지지부(18); 부재 지지부(18)에 설치된 제 1 축부(72)를 회전축으로 하여 회동 가능하게 된 제 1 부재(76); 제 1 부재(76)에 장착되고, 상완을 지지하는 상완 지지부(16); 부재 지지부(18)에 설치되고, 제 1 축부(72)와의 거리를 변경 가능한 가변부(60); 제 1 부재(76)에 회동 가능하게 장착되는 동시에 가변부(60)에 설치된 제 2 축부(84)를 회전축으로 하여 회동 가능하게 장착되고, 팔이 인체 전방측으로 회전하는 방향으로 힘을 가하는 힘 부가 수단(80); 부재 지지부(18)에 설치되는 동시에, 부재 지지부(18)에서의 가변부(60)의 위치를 변경 가능한 조정부(90);를 포함하여 구성한다.
Description
본 발명은, 완부(腕部) 보조 장치에 관한 것이다.
하기 특허문헌 1에는, 사용자의 신체 상에 착용 가능하게 구성된 하니스(harness)와, 사용자의 팔을 지지하도록 구성되는 동시에 하니스에 연결된 팔 지지구를 구비한 팔 지지 시스템이 개시되어 있다. 팔 지지구에는, 1개 또는 복수의 힘 부가(付勢) 수단이 장착되어 있다. 힘 부가 수단은, 팔에 작용하는 중력의 적어도 일부를 상쇄하기 위한 오프셋력(力)을 발생시킨다.
팔을 들어 올려서 하는 작업은, 예를 들어, 제품의 조립, 도장, 높은 나무에 재배된 과실의 채취, 벽에 대한 그림 등의 접착 등 다방면에 걸쳐있다. 또한, 하나의 작업 안에 있어서, 상황에 따라 작업자가 필요로 하는 팔의 힘은 변한다. 그러므로, 보조 장치에 의해 보조해야 할 힘의 크기도 작업의 상황에 따라 변한다. 따라서, 보조 장치의 장착자의 작업성을 향상시키는 것이 요구되고 있다.
본 발명은, 상기 사실을 고려하여, 장착자의 작업성을 향상시킨 완부 보조 장치를 얻는 것을 목적으로 한다.
청구항 1에 기재된 완부 보조 장치는, 장착자의 상완의 측방측에 배치된 부재 지지부; 상기 부재 지지부의 인체 하방측에 설치되고, 장착자의 상체를 배면측으로부터 지지하는 상체 지지부; 상기 상완을 따라 배치되고, 상기 부재 지지부에 축방향을 인체 좌우 방향으로 하여 설치된 제 1 축부를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 된 제 1 부재; 상기 제 1 부재의 한쪽의 단부에 장착되고, 상기 상완을 지지하는 상완 지지부; 상기 상완을 따라 배치되고, 한쪽의 단부가, 상기 제 1 부재에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착되는 동시에, 다른쪽의 단부가, 상기 부재 지지부에 축방향을 인체 좌우 방향으로 하여 설치된 제 2 축부를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 접속되고, 장착자의 팔에 힘을 가하는 힘 부가 수단;을 포함하여 구성되어 있다.
청구항 1에 기재된 완부 보조 장치에 의하면, 상완(上腕)을 따라 힘 부가 수단이 배치되어 있다. 힘 부가 수단은, 그 한쪽의 단부가, 제 1 부재에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착되어 있다. 또한, 다른쪽의 단부가, 부재 지지부에 간접적으로 또는 직접적으로, 축방향을 인체 좌우 방향으로 하여 설치된 제 2 축부를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착되어 있다. 완부 보조 장치를 장착한 사람이, 인체 전방측으로 팔을 회동했을 때, 즉, 팔을 들어 올렸을 때에, 제 1 부재는, 제 1 축부 둘레에 인체 전방측으로 회동하는 동시에, 힘 부가 수단의 한쪽의 단부는, 인체 전방측으로 이동한다. 그러므로, 힘 부가 수단의 한쪽의 단부로부터 다른쪽의 단부까지의 거리, 즉, 힘 부가 수단의 길이가 변하고, 이것에 따라 힘 부가력이 발생한다. 이 힘 부가력에 의해, 제 1 부재에는, 제 1 축부 둘레의 모멘트가 작용한다. 여기서, 모멘트 레버는, 제 1 축부로부터 힘 부가 수단까지의 거리에 의해 정해진다. 구체적으로, 인체 측면에서 봤을 때 제 1 축부로부터 힘 부가 수단으로 내린 수선(垂線)의 길이가 모멘트 레버에 상당한다. 이것에 의해, 완부 보조 장치를 장착한 사람의 팔의 회전을 보조하기 위한 보조력을 발생시킬 수 있다. 이것에 의해, 장착자의 작업성을 향상시킬 수 있다.
청구항 2에 기재된 완부 보조 장치는, 청구항 1에 기재된 완부 보조 장치에 있어서, 상기 부재 지지부에 설치되고, 상기 제 1 축부와의 거리를 변경 가능한 가변부; 상기 부재 지지부에 설치되는 동시에, 상기 부재 지지부에서의 상기 가변부의 위치를 변경 가능한 조정부;를 포함하여 구성되고, 상기 힘 부가 수단은, 상기 다른쪽의 단부가, 상기 가변부를 통하여 상기 부재 지지부에 간접적으로 장착되고, 장착자의 팔이 인체 전방측으로 회전하는 방향으로 힘을 가한다.
청구항 2에 기재된 완부 보조 장치에 의하면, 부재 지지부에는, 제 1 축부와의 거리를 변경 가능한 가변부와 장착자의 조작에 의해 부재 지지부에서의 가변부의 위치를 변경하기 위한 조정부가 설치되어 있다. 그러므로, 부재 지지부에서의 가변부의 위치를 변경함으로써, 가변부에 회동 가능하게 장착된 힘 부가 수단의 다른쪽의 단부를 이동시킬 수 있다. 힘 부가 수단의 다른쪽의 단부를 이동시킴으로써 제 1 축부로부터 힘 부가 수단까지의 거리, 즉, 인체 측면에서 봤을 때 제 1 축부로부터 힘 부가 수단으로 내린 수선의 길이가 변하기 때문에, 힘 부가 수단에 의해 발생하는 모멘트의 모멘트 레버가 변한다. 이것에 의해, 힘 부가 수단을 바꾸어 달지 않고 팔의 회전을 보조하기 위한 보조력의 범위를 변경할 수 있다.
청구항 3에 기재된 완부 보조 장치는, 청구항 2에 기재된 완부 보조 장치에 있어서, 상기 조정부는, 상기 부재 지지부에서의 상기 가변부의 인체 상하 방향의 위치를 무단계로 변경 가능하게 되어 있다.
청구항 3에 기재된 완부 보조 장치에 의하면, 조정부를 조작함으로써 부재 지지부에서의 가변부의 인체 상하 방향의 위치를 무단계로 변경할 수 있다. 이것에 의해, 작업 목적을 따라 보조력의 범위를 적절히 설정할 수 있다.
청구항 4에 기재된 완부 보조 장치는, 청구항 2 또는 청구항 3에 기재된 완부 보조 장치에 있어서, 상기 힘 부가 수단은, 중립점을 넘으면 힘 부가 방향이 인체 후방측으로 반전하고, 상기 부재 지지부는, 장착자의 팔의 인체 후방측으로의 회전에 대하여 상기 제 1 부재를 정지시키기 위한 스토퍼를 구비하고 있다.
청구항 4에 기재된 완부 보조 장치에 의하면, 힘 부가 수단은, 중립점을 넘으면 힘 부가 방향이 인체 후방측으로 반전하기 때문에, 인체 후방측으로 팔을 회전시켰을 때에, 팔을 인체 후방측을 향하여 회동시키는 보조력이 생긴다. 이것에 대하여, 부재 지지부는, 장착자의 팔의 인체 후방측으로의 회전에 대하여 제 1 부재를 정지시키기 위한 스토퍼를 구비하고 있다. 그러므로, 예를 들어, 보조력이 강해지도록 가변부를 조정했을 경우에도, 팔이 인체 후방측으로 강한 보조력으로 회동하는 것을 방지 또는 억제할 수 있다. 또한, 보조력이 반전하는 경계가 되는 중립점에서는 보조력이 생기지 않게 되므로, 예를 들어, 제 1 부재가 인체 상하 방향을 따라 배치된 상태를 중립점으로 설정함으로써, 완부 보조 장치를 장착하는 사람은, 팔을 내린 상태로 용이하게 장착할 수 있다.
청구항 5에 기재된 완부 보조 장치는, 청구항 2 내지 청구항 4 중 어느 한 항에 기재된 완부 보조 장치에 있어서, 상기 힘 부가 수단의 상기 다른쪽의 단부는, 상기 가변부 대신에 상기 가변부로부터 장착자의 팔꿈치측을 향하여 연재된 연장부에 축방향을 인체 좌우 방향으로 하여 설치된 제 3 축부를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착되어 있다.
청구항 5에 기재된 완부 보조 장치에 의하면, 힘 부가 수단의 다른쪽의 단부는, 가변부로부터 장착자의 팔꿈치측을 향하여 연재(延在)된 연장부에 축방향을 인체 좌우 방향으로 하여 설치된 제 3 축부를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착되어 있다. 그러므로, 힘 부가 수단의 다른쪽의 단부의 위치가 가변부보다 인체 전방측으로 이동하여, 제 1 축부와 힘 부가 수단의 거리가 변한다. 이것에 의해, 힘 부가 수단을 바꾸어 달지 않고 팔의 회전을 보조하기 위한 보조력의 범위를 보다 넓은 범위로 조정할 수 있다.
청구항 6에 기재된 완부 보조 장치는, 청구항 2 내지 청구항 5 중 어느 한 항에 기재된 완부 보조 장치에 있어서, 상기 상완 지지부는, 각각 상기 상완의 양측부에 대향하여 배치되는 동시에 인체 좌우 방향 외측에 있어서 상기 제 1 부재에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착된 한쌍의 측부재; 상기 한쌍의 측부재의 인체 후방측 단부에 걸쳐 형성되고, 상기 상완의 배면측에 맞닿는 배면측 부재;를 구비하고, 상기 상완의 정면측이 개방되어 있다.
청구항 6에 기재된 완부 보조 장치에 의하면, 상완의 정면측이 개방된 상완 지지부의 한쌍의 측부재(側部材)에는, 인체 좌우 방향 외측에 있어서 제 1 부재가 장착되어 있다. 그러므로, 상완의 정면측이 개방된 상태에 있어서도 한쌍의 측부재와 배면측 부재에 의해 상완을 안정적으로 유지할 수 있다. 또한, 상완의 정면측을 개방시키고 있으므로 완부 보조 장치의 탈부착을 용이하게 할 수 있는 동시에, 상완이 구속되지 않기 때문에 완부 보조 장치를 장착한 상태로 조정부를 용이하게 조작할 수 있다.
청구항 7에 기재된 완부 보조 장치는, 청구항 2 내지 청구항 6 중 어느 한 항에 기재된 완부 보조 장치에 있어서, 상기 상체 지지부의 상방측에 인체 좌우 방향을 따라 형성되는 동시에 장착자의 어깨의 측방측으로부터 상기 부재 지지부에 연결되고, 인체 좌우 방향의 길이를 조정 가능한 암부를 구비한다.
청구항 7에 기재된 완부 보조 장치에 의하면, 상체 지지부의 상방측에는, 인체 좌우 방향의 길이를 조정 가능한 암부를 구비하고 있다. 그러므로, 완부 보조 장치를 장착하는 사람의 체형에 맞추어 암부의 길이를 조정함으로써, 부재 지지부와 이것에 장착된 제 1 부재를 적절한 위치에서 상완의 측방측에 배치시킬 수 있다. 이것에 의해, 완부 보조 장치를 장착한 사람의 상완에 적절히 보조력을 부여할 수 있다.
청구항 8에 기재된 완부 보조 장치는, 청구항 2 내지 청구항 7 중 어느 한 항에 기재된 완부 보조 장치에 있어서, 상기 상체 지지부는, 장착자의 허리 둘레 방향을 따라 띠형상으로 형성되는 동시에, 장착자의 허리에 고정 가능한 띠부를 구비한다.
청구항 8에 기재된 완부 보조 장치에 의하면, 상체 지지부는, 장착자의 허리 둘레 방향을 따라 띠형상으로 형성되는 동시에, 장착자의 허리에 고정 가능한 띠(帶)부를 구비하고 있다. 그러므로, 부재 지지부를 구비한 완부 보조 장치를 안정적으로 장착자에게 장착시킬 수 있다. 이것에 의해, 상체를 안정적으로 유지한 상태로 상완에 적절히 보조력을 부여할 수 있다.
청구항 9에 기재된 완부 보조 장치는, 청구항 2 내지 청구항 8 중 어느 한 항에 기재된 완부 보조 장치에 있어서, 상기 상체 지지부는, 인체 상하 방향을 따라 슬라이드 가능한 가동부에 의해 상기 상체 지지부의 인체 상하 방향의 높이를 조정 가능한 슬라이드부를 구비하고 있다.
청구항 9에 기재된 완부 보조 장치에 의하면, 상체 지지부는, 가동부에 의해 인체 상하 방향의 높이를 조절 가능한 슬라이드부를 구비하고 있다. 그러므로, 완부 보조 장치를 장착하는 사람의 체형에 맞추어 상체 지지부의 높이를 조정함으로써, 부재 지지부를 구비한 완부 보조 장치를 적절한 위치에서 장착자에게 장착시킬 수 있다. 이것에 의해, 완부 보조 장치를 장착한 사람의 상완에 적절히 보조력을 부여할 수 있다.
청구항 10에 기재된 완부 보조 장치는, 청구항 1에 기재된 완부 보조 장치에 있어서, 상기 힘 부가 수단은, 상기 다른쪽의 단부가, 상기 부재 지지부에 직접적으로 장착되어 있다.
청구항 10에 기재된 완부 보조 장치에 의하면, 힘 부가 수단의 다른쪽의 단부가 부재 지지부에 직접적으로 장착되어 있어 심플한 구조이므로, 경량이며, 또한, 저렴하게 제조할 수 있다.
청구항 11에 기재된 완부 보조 장치는, 청구항 10에 기재된 완부 보조 장치에 있어서, 장착자의 팔의 회전 각도에 대하여, 장착자의 팔이 수평으로 펼쳐진 경우를 0도로 하고, 장착자의 팔이 상방측으로 들어 올려진 경우를 양으로 정의하는 경우에 있어서, 상기 힘 부가 수단에 의해 장착자의 팔에 힘을 가하는 토크는, -90도인 경우에 음의 값이고, 0도 초과 90도 미만의 소정 각도인 경우에 최대치가 되는 양의 값이고, 90도인 경우에 양의 값인 한편 -90도 내지 90도의 범위에서 변동하는 것에 따라 값이 매끄럽게 변동한다.
청구항 11에 기재된 완부 보조 장치에 의하면, 힘 부가 수단에 의해 장착자의 팔에 힘을 가하는 토크가, -90도인 경우에 음의 값으로, 0도 초과 90도 미만의 소정 각도인 경우에 최대치가 되는 양의 값으로, 90도인 경우에 양의 값으로 동시에, -90도 내지 90도의 범위에서 변동하는 것에 따라 값이 매끄럽게 변동하므로, 사람의 부하에 대하여 보조력이 강하여, 탈진했을 경우에도 팔이 내려가는 것을 방지할 수 있다. 또한, 보조력이 반전하는 경계가 되는 중립점에서는 보조력이 생기지 않게 되므로, 완부 보조 장치를 장착하는 사람은, 중립점이 되는 상태로 용이하게 장착할 수 있다.
청구항 12에 기재된 완부 보조 장치는, 청구항 10 또는 청구항 11에 기재된 완부 보조 장치에 있어서, 장착자의 팔의 인체 후방측으로의 회전에 대하여 상기 제 1 부재를 정지시키기 위한 록 기구를 구비하고 있다.
청구항 12에 기재된 완부 보조 장치에 의하면, 장착자의 팔의 인체 후방측으로의 회전에 대하여 제 1 부재를 정지시키기 위한 록(lock) 기구를 구비하고 있으므로, 팔이 인체 후방측으로 강한 보조력으로 회동하는 것을 방지 또는 억제할 수 있다.
청구항 13에 기재된 완부 보조 장치는, 청구항 10 내지 청구항 12 중 어느 한 항에 기재된 완부 보조 장치에 있어서, 장착자의 허리 둘레 방향을 따라 띠형상으로 형성되는 동시에, 장착자의 허리에 고정 가능한 띠부를 구비하고, 상기 상체 지지부는, 인체 상하 방향을 따라 좌우에 쌍으로 배치되는 동시에, 각각의 하단이, 회전에 대한 3개의 자유도를 갖도록 상기 띠부에 장착되어 있다.
청구항 13에 기재된 완부 보조 장치에 의하면, 상체 지지부가, 인체 상하 방향을 따라 좌우에 쌍으로 배치되는 동시에, 각각의 하단이, 회전에 대한 3개의 자유도를 갖도록 띠부에 장착되어 있으므로, 허리에 고정된 띠부에 대하여 상체 지지부를 유연하게 움직일 수 있다.
청구항 14에 기재된 완부 보조 장치는, 청구항 13에 기재된 완부 보조 장치에 있어서, 상기 한쌍의 상체 지지부는, 각각, 길이의 조절이 가능하다.
청구항 14에 기재된 완부 보조 장치에 의하면, 한쌍의 상체 지지부가, 각각, 길이의 조절이 가능하므로 장착자의 신장에 따라 한쌍의 상체 지지부의 길이를 조절할 수 있고, 또한, 상체 지지부의 길이를 조절함으로써, 허리에 고정되는 띠부의 위치를 조절할 수 있다.
청구항 15에 기재된 완부 보조 장치는, 청구항 13또는 청구항 14에 기재된 완부 보조 장치에 있어서, 상기 한쌍의 상체 지지부 각각에서의 상방에 있어서, 그 한쌍의 상체 지지부를 서로 연결하고, 장착자의 상체를 배면측으로부터 신축 가능하게 지지하는 배면 연결 부재를 구비하고 있다.
청구항 15에 기재된 완부 보조 장치에 의하면, 한쌍의 상체 지지부 각각에서의 상방에 있어서, 해당 한쌍의 상체 지지부를 서로 연결하고, 장착자의 상체를 배면측으로부터 신축 가능하게 지지하는 배면 연결 부재를 구비하고 있으므로, 팔을 전방을 향하게 하거나 옆으로 뻗음으로써 배면 연결 부재가 신축하여, 한쌍의 상체 지지부를 유연하게 움직일 수 있다.
청구항 16에 기재된 완부 보조 장치는, 청구항 13 내지 청구항 15 중 어느 한 항에 기재된 완부 보조 장치에 있어서, 상체 상하 방향을 따라 좌우에 쌍으로 배치되고, 각각의 하단이 상기 띠부에서의 인체 전방측에 장착되는 한편, 각각의 상단이 상기 배면 연결 부재에 장착된 어깨 벨트를 구비하고 있다.
청구항 16에 기재된 완부 보조 장치에 의하면, 상체 상하 방향을 따라 좌우에 쌍으로 배치되어 있는 어깨 벨트를 구비하고 있으므로, 장착자는 완부 보조 장치를 배낭과 같이 짊어져 혼자서 장착할 수 있다.
청구항 17에 기재된 완부 보조 장치는, 청구항 16에 기재된 완부 보조 장치에 있어서, 상기 상완 지지부를 상기 어깨 벨트에 탈부착 가능하게 장착하는 동시에, 상기 상완에 탈부착 가능하게 감김으로써 상기 상완 지지부를 상기 상완에 고정하는 고정구를 구비하고 있다.
청구항 17에 기재된 완부 보조 장치에 의하면, 상완 지지부와 어깨 벨트가, 상완 지지부를 상완에 고정하는 고정구로 연결되어 있으므로, 장착자는 완부 보조 장치를 장착하고 나서 용이하게 고정구를 상완에 감을 수 있다.
청구항 18에 기재된 완부 보조 장치는, 상기 띠부에 장착되어 있는 상기 상체 지지부의 하단간의 거리를 일정하게 유지하기 위한 거리 유지 부재를 구비하고 있다.
청구항 18에 기재된 완부 보조 장치에 의하면, 상기 띠부에 장착되어 있는 상기 상체 지지부의 하단간의 거리를 일정하게 유지할 수 있다.
청구항 19에 기재된 완부 보조 장치는, 청구항 10 내지 청구항 17 중 어느 한 항에 기재된 완부 보조 장치에 있어서, 상기 상완 지지부는, 각각 상기 상완의 양측부에 대향하여 배치되는 동시에 인체 좌우 방향 외측에 있어서 상기 제 1 부재에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착된 한쌍의 측부재; 상기 한쌍의 측부재의 인체 후방측 단부에 걸쳐 형성되고, 상기 상완의 배면측에 맞닿는 배면측 부재;를 구비하고, 상기 상완의 정면측이 개방되고, 상기 완부 보조 장치는, 소정 위치로부터의 상기 상완 지지부의 인체 상방향으로의 회동을 제한하는 회동 제한 부재를 구비하고 있다.
청구항 19에 기재된 완부 보조 장치에 의하면, 소정 위치로부터의 상완 지지부의 인체 상방향으로의 회동을 제한하는 회동 제한 부재를 구비하고 있으므로, 상완 지지부가 팔에서 벗겨져 팔과는 무관하게 회동하는 것을 방지할 수 있고, 상완 지지부를 항상 상완과 접촉시킬 수 있다.
청구항 20에 기재된 완부 보조 장치는, 청구항 10 내지 청구항 18 중 어느 한 항에 기재된 완부 보조 장치에 있어서, 상기 상체 지지부의 상방측에 인체 좌우 방향을 따라 형성되는 동시에 장착자의 어깨의 측방측으로부터 상기 부재 지지부에 연결된 암부를 구비하고 있다.
청구항 20에 기재된 완부 보조 장치에 의하면, 상체 지지부의 상방측에 인체 좌우 방향을 따라 형성되는 동시에 장착자의 어깨의 측방측으로부터 부재 지지부에 연결된 암부를 구비하고 있으므로, 상완을 따라 배치되는 제 1 부재를 디폴트(default)로 인체 전방측을 향하게 할 수 있다.
이상 설명한 바와 같이, 본 발명에 따른 완부 보조 장치는, 장착자의 작업성을 향상시킬 수 있다는 뛰어난 효과를 갖는다. 또한, 본 발명에 따른 완부 보조 장치는, 힘 부가 수단을 바꾸어 달지 않고 팔의 회전을 보조하기 위한 보조력의 범위를 변경할 수 있다는 뛰어난 효과를 갖는다.
도 1은 제 1 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 측면도이다.
도 2는 제 1 실시 형태에 따른 완부 보조 장치의 사시도이다.
도 3은 제 1 실시 형태에 따른 완부 보조 장치의 부재 지지부의 측면도이다.
도 4는 제 1 실시 형태에 따른 완부 보조 장치와 장착자의 위치 관계를 나타내는 측면도이다.
도 5는 제 1 실시 형태에 따른 완부 보조 장치와 장착자의 위치 관계를 모식적으로 나타내는 모식도이다.
도 6은 제 1 실시 형태에 따른 완부 보조 장치에 의해 얻어지는 보조력과 팔의 회전 각도의 관계를 나타내는 그래프이다.
도 7은 제 1 실시 형태에 따른 완부 보조 장치가 중립점에 있는 상태를 나타내는 측면도이다.
도 8은 제 1 실시 형태에 따른 완부 보조 장치의 인체 후방측으로의 회전이 정지된 상태를 나타내는 측면도이다.
도 9는 제 2 실시 형태에 따른 완부 보조 장치와 장착자의 위치 관계를 모식적으로 나타내는 모식도이다.
도 10은 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 측면도이다.
도 11는 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 정면도이다.
도 12는 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 배면도이다.
도 13은 제 3 실시 형태에 따른 완부 보조 장치의 상완 지지부 주변을 나타내는 부분 확대 사시도이다.
도 14는 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 배면도이며, (A)는 상체 지지부의 길이를 길게 한 상태를 나타내고, (B)는 상체 지지부의 길이를 짧게 한 상태를 나타낸다.
도 15는 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 배면도이며, (A)는 팔을 전방을 향하게 하여 배면 연결 부재를 편 상태를 나타내고, (B)는 팔을 옆으로 벌려 배면 연결 부재를 접은 상태를 나타낸다.
도 16은 제 3 실시 형태에 따른 완부 보조 장치의 장착자에 대한 탈부착을 설명하는 사시도이며, (A)는 상완 지지부가 후크 앤드 루프 패스너로 어깨 벨트에 연결되어 있는 상태를 나타내고, (B)는 상완 지지부가 후크 앤드 루프 패스너로 상완에 감겨져 있는 상태를 나타낸다.
도 17은 제 3 실시 형태에 따른 완부 보조 장치와 장착자의 위치 관계를 나타내는 모식도이다.
도 18은 제 3 실시 형태에 따른 완부 보조 장치에 의해 얻어지는 보조력과 팔의 회전 각도의 관계를 나타내는 그래프이다.
도 19는 제 3 실시 형태에 따른 완부 보조 장치를 나타내는 측면도이며, (A)는 양의 각도에 위치한 상태를 나타내고, (B)는 -60도에 위치한 상태를 나타내고, (C)는 -90도에 위치한 상태를 나타낸다.
도 20은 제 3 실시 형태에 따른 완부 보조 장치의 변형예를 나타내는 배면도이다.
도 2는 제 1 실시 형태에 따른 완부 보조 장치의 사시도이다.
도 3은 제 1 실시 형태에 따른 완부 보조 장치의 부재 지지부의 측면도이다.
도 4는 제 1 실시 형태에 따른 완부 보조 장치와 장착자의 위치 관계를 나타내는 측면도이다.
도 5는 제 1 실시 형태에 따른 완부 보조 장치와 장착자의 위치 관계를 모식적으로 나타내는 모식도이다.
도 6은 제 1 실시 형태에 따른 완부 보조 장치에 의해 얻어지는 보조력과 팔의 회전 각도의 관계를 나타내는 그래프이다.
도 7은 제 1 실시 형태에 따른 완부 보조 장치가 중립점에 있는 상태를 나타내는 측면도이다.
도 8은 제 1 실시 형태에 따른 완부 보조 장치의 인체 후방측으로의 회전이 정지된 상태를 나타내는 측면도이다.
도 9는 제 2 실시 형태에 따른 완부 보조 장치와 장착자의 위치 관계를 모식적으로 나타내는 모식도이다.
도 10은 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 측면도이다.
도 11는 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 정면도이다.
도 12는 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 배면도이다.
도 13은 제 3 실시 형태에 따른 완부 보조 장치의 상완 지지부 주변을 나타내는 부분 확대 사시도이다.
도 14는 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 배면도이며, (A)는 상체 지지부의 길이를 길게 한 상태를 나타내고, (B)는 상체 지지부의 길이를 짧게 한 상태를 나타낸다.
도 15는 제 3 실시 형태에 따른 완부 보조 장치를 장착자에게 장착한 상태를 나타내는 배면도이며, (A)는 팔을 전방을 향하게 하여 배면 연결 부재를 편 상태를 나타내고, (B)는 팔을 옆으로 벌려 배면 연결 부재를 접은 상태를 나타낸다.
도 16은 제 3 실시 형태에 따른 완부 보조 장치의 장착자에 대한 탈부착을 설명하는 사시도이며, (A)는 상완 지지부가 후크 앤드 루프 패스너로 어깨 벨트에 연결되어 있는 상태를 나타내고, (B)는 상완 지지부가 후크 앤드 루프 패스너로 상완에 감겨져 있는 상태를 나타낸다.
도 17은 제 3 실시 형태에 따른 완부 보조 장치와 장착자의 위치 관계를 나타내는 모식도이다.
도 18은 제 3 실시 형태에 따른 완부 보조 장치에 의해 얻어지는 보조력과 팔의 회전 각도의 관계를 나타내는 그래프이다.
도 19는 제 3 실시 형태에 따른 완부 보조 장치를 나타내는 측면도이며, (A)는 양의 각도에 위치한 상태를 나타내고, (B)는 -60도에 위치한 상태를 나타내고, (C)는 -90도에 위치한 상태를 나타낸다.
도 20은 제 3 실시 형태에 따른 완부 보조 장치의 변형예를 나타내는 배면도이다.
이하, 도 1~도 8을 이용하여, 본 발명의 실시 형태의 일례인 완부 보조 장치(10)에 대하여 설명한다. 이하의 도면에 있어서, 화살표 FR은 인체 전방측을 나타내고, 화살표 UP는 인체 상방측을 나타내고, 화살표 W는 인체 좌우 방향을 나타내고 있다.
(완부 보조 장치(10))
도 1에는, 완부 보조 장치(10)를 장착한 장착자(P)의 측면도가 나타나 있다. 완부 보조 장치(10)는, 장착자(P)의 상반신에 장착된다. 구체적으로, 장착자(P)의 허리부(WP)를 지지하는 허리부 지지부(12)와, 장착자(P)의 상체부(UB)를 배면측으로부터 지지하는 상체 지지부(14)와, 장착자(P)의 상완부(AP)를 지지하는 상완 지지부(16)를 포함하여 구성되어 있다.
(허리부 지지부(12))
도 2에 나타나는 바와 같이, 완부 보조 장치(10)의 상체 지지부(14)의 인체 하방측에는, 인체의 허리부(WP)의 바깥 둘레를 따라 띠형상으로 형성된 띠부로서의 허리 벨트(22)가 배치되어 있다. 허리 벨트(22)는, 그 인체 배면측이 상체 지지부(14)의 하단부에 고정되는 동시에, 인체 전면측에 미도시의 탈부착부 및 고정부를 구비하여 장착자(P)의 허리부(WP)에 장착 가능하게 구성되어 있다. 탈부착부가 탈부착됨으로써, 장착자(P)의 허리부(WP)에 허리 벨트(22)가 감기고, 감겨진 허리 벨트(22)는, 고정부를 통하여 장착자(P) 또는 장착자(P)가 착용하는 작업복 등의 착의에 고정된다. 또한, 허리 벨트(22)는, 길이 조절이 가능하게 되어 있다. 그러므로, 허리 벨트(22)는, 그 길이를 조절함으로써, 장착자(P)의 허리부(WP)에 확실하게 장착된다. 이것에 의해, 완부 보조 장치를 안정적으로 장착자(P)에게 장착시킬 수 있다.
(상체 지지부(14))
허리부 지지부(12)의 인체 상방측에는, 장착자(P)의 상체부(UB)를 배면측으로부터 지지하는 금속제의 상체 지지부(14)가 배치되어 있다. 상체 지지부(14)는, 대략 원통형의 파이프재에 의해, 인체 정면에서 봤을 때 대략 역 V자 형상으로 형성된 프레임부(24)와, 프레임부(24)의 인체 하방측의 인체 좌우 방향 양단부(하단부)에 인체 상하 방향을 따라 슬라이드 가능하게 형성된 슬라이드부(26)와, 허리 벨트(22)의 인체 배면측에 고정되는 동시에 내부에 슬라이드부(26)가 삽입 통과(揷通)되는 프레임 장착부(28)를 포함하여 구성되어 있다.
프레임 장착부(28)는, 인체 상하 방향으로 개방된 대략 사각 통 형상으로 형성되고, 인체 전면측의 인체 좌우 방향 양단부가, 허리 벨트(22)의 인체 배면측에 고정되어 있다. 또한, 프레임 장착부(28)의 인체 전면측의 인체 좌우 방향 양단부의 안쪽 둘레측에는, 프레임부(24)의 하단부를 삽입 통과 가능하게 형성된 대략 원통형상의 프레임 삽입부(30)가, 프레임 장착부(28)와 일체로 형성되어 있다. 프레임 장착부(28)의 안쪽 둘레측에는, 그 지름 방향 외측을 향하여 연재된 구멍이 형성되어 있다. 구멍의 내부에는, 예를 들어, 스프링 등이 장착됨으로써, 구멍으로부터 지름 방향 내측을 향하여 돌출 가능하게 되는 동시에 외력에 의해 구멍의 내측에 매몰 가능하게 된 대략 봉 형상의 핀(도시 생략)을 구비한 핀 걸림(係止)부(32)가 설치되어 있다.
슬라이드부(26)는, 프레임 삽입부(30)에 삽입 통과되었을 때에 바깥 둘레부에 있어서 핀 걸림부(32)와 대향하는 부분에, 지름 방향 내측을 향하여 구멍이 형성된 삽입 통과부(34)를 프레임부(24)의 축방향을 따라 복수 구비하고 있다. 그러므로, 프레임 삽입부(30)에 삽입 통과된 슬라이드부(26)의 삽입 통과부(34)와 핀 걸림부(32)가 대향했을 때에, 스프링 등에 의해 힘 가해진 핀 걸림부(32)의 핀이 삽입 통과부(34)를 향하여 돌출되어, 삽입 통과부(34)에 삽입 통과된다. 이것에 의해, 프레임부(24)는, 프레임 장착부(28)에 대하여 걸린다. 또한, 프레임 장착부(28)는, 조작에 의해, 핀을 프레임 삽입부(30)의 구멍 내측으로 집어넣기 위한 미도시의 인입부를 구비하고 있다. 그러므로, 프레임부(24)와 프레임 장착부(28)의 맞물림(係合)을 해제하여 프레임부(24)의 허리부 지지부(12)로부터의 인체 상하 방향의 높이를 변경할 수 있다. 이것에 의해, 완부 보조 장치를 장착하는 사람의 체형에 맞추어 상체 지지부의 높이를 조정할 수 있다.
그리고, 여기서는, 핀 걸림부(32)는, 핀이 스프링 등에 의해 힘이 가해져 삽입 통과부(34)에 삽입 통과된다고 설명했지만, 이것에 한정되지 않고, 다른 양태에 의해 프레임부가 프레임 장착부에 대하여 걸릴 수도 있다. 예를 들어, 핀 걸림부는, 프레임 장착부로부터 프레임 삽입부에 걸쳐 관통 형성된 구멍에 프레임 장착부의 외측으로부터 수동으로 삽입 통과된 핀 등의 봉 형상 부재에 의해 삽입 통과부가 걸릴 수도 있다.
(암부(36))
상체 지지부(14)의 인체 상방측에는, 장착자(P)의 어깨 폭에 맞추어 상완 지지부(16)의 인체 좌우 방향의 길이를 조정 가능하게 구성된 금속제의 암(arm)부(36)가 배치되어 있다. 암부(36)는, 인체 좌우 방향 대략 중앙에 있어서 프레임부(24)의 상단에 배치된 대략 상자 형상의 암 중앙부(36A)와 암 중앙부(36A)로부터 인체 좌우 방향을 따라 신축 가능하게 구성된 좌우 한쌍의 암(36B)을 구비하고 있다. 좌우 한쌍의 암(36B)은, 인체 우측과 인체 좌측에서 각각 복수(2개)의 암(36B)을 구비한다.
각각의 좌우 한쌍의 암(36B)은, 인체 좌우 방향 외측에 있어서, 인체의 어깨의 측방측으로부터 인체 전방측을 향하여 만곡된 평면에서 봤을 때 대략 L자 형상으로 형성되어 있다. 인체 전방측을 향하여 만곡된 측의 선단은, 후술하는 부재 지지부(18)에 연결되어 있다. 그러므로, 장착자(P)의 체형(어깨 폭)에 맞추어 암(36B)의 길이를 조정함으로써, 부재 지지부(18)를 적절한 위치에서 장착자(P)의 상완부(AP)의 측방측에 배치시킬 수 있다.
(부재 지지부(18))
좌우 한쌍의 암(36B)의 인체 전방측 단부에는, 장착자(P)의 상완의 측방측에 배치된 금속제의 좌우 한쌍의 부재 지지부(18)가 연결되어 있다. 도 2에 나타나는 바와 같이, 부재 지지부(18)는, 바깥 둘레 형상이 대략 상자 형상으로 형성되어 있다. 부재 지지부(18)의 상단부에는, 인체 전후 방향으로 연재되는 동시에 대략 판 형상으로 형성된 상면부(42)가 형성되고, 하단부에는, 인체 전후 방향으로 연재되는 동시에 대략 판 형상으로 형성된 하면부(44)가 형성되어 있다. 또한, 부재 지지부(18)의 인체 좌우 방향의 양측부에는, 한쌍의 금속판(46)이, 부재 지지부(18)의 양측부를 덮도록 장착되어 있다.
도 3에는, 한쌍의 금속판(46)을 제거한 부재 지지부(18)가 나타나 있다. 상면부(42)의 인체 상방측 및 인체 배면측의 단부에는, 평면에서 봤을 때 대략 타원형으로 형성된 상면측 타원판(48)이 장착되어 있다. 또한, 하면부(44)의 인체 하방측 및 인체 배면측의 단부에는, 평면에서 봤을 때 대략 타원형으로 형성된 하면측 타원판(50)이 장착되어 있다.
부재 지지부(18)의 인체 배면측에는, 상면부(42)로부터 하면부(44)에 걸쳐 인체 상하 방향을 따라 축형상의 배면측 축부(52)가 배치되어 있다. 상면측 타원판(48)은, 상면부(42)를 관통한 배면측 축부(52)의 상단부에 인체 좌우 방향으로 회동 가능하게 장착되어 있다. 또한, 하면측 타원판(50)은, 하면부(44)를 관통한 배면측 축부(52)의 하단부에 인체 좌우 방향으로 회동 가능하게 장착되어 있다. 상면측 타원판(48)의 인체 배면측과 하면측과 하면측 타원판(50)의 인체 배면측 및 상면측의 사이에는, 인체 상하 방향을 따라 형성된 축형상의 고정축부(54)가 고정되어 있다. 또한, 복수(2개)의 암(36B)의 인체 전방측 단부는, 상면측 타원판(48)과 하면측 타원판(50)의 인체 배면측 단부에 각각 접합되어 있다. 그러므로, 부재 지지부(18)를 암(36B)에 대하여 인체 좌우 방향으로 회동시킬 수 있다. 이것에 의해, 부재 지지부(18)를 장착자(P)의 체형에 맞추어 배치할 수 있다.
부재 지지부(18)의 내부에는, 바깥 둘레 형상이 대략 직육면체형으로 형성된 금속제의 가변부(60)가 배치되어 있다. 가변부(60)의 인체 전면측의 단부에는, 인체 상하 방향을 따라 전측 구멍부(60A)가 관통 형성되어 있다. 또한, 가변부(60)의 인체 배면측의 단부에는, 인체 상하 방향을 따라 후측 구멍부(60B)가 관통 형성되어 있다. 또한, 가변부(60)의 인체 전후 방향 대략 중앙부에는, 후술하는 조정부로서의 널링 나사(90)를 나사결합(螺合)하기 위한 암 나사부(60C)가 관통 형성되어 있다.
가변부(60)의 전측 구멍부(60A)에는, 부재 지지부(18)의 인체 전면측에 있어서 상면부(42)로부터 하면부(44)에 걸쳐 인체 상하 방향을 따라 배치된 축형상의 전면측 축부(56)가 삽입 통과되어 있다. 또한, 가변부(60)의 후측 구멍부(60B)에는, 배면측 축부(52)가 삽입 통과되어 있다. 전측 구멍부(60A)의 안지름은, 전면측 축부(56)의 바깥지름보다 크게 형성되고, 후측 구멍부(60B)의 안지름은, 배면측 축부(52)의 바깥지름보다 크게 형성되어 있다. 이것에 의해, 가변부(60)는, 전면측 축부(56)와 배면측 축부(52)의 축방향을 따라 부재 지지부(18)의 내부를 이동 가능하도록 되어 있다.
가변부(60)의 인체 전방측 단부에는, 인체 좌우 방향을 면외 방향으로 하는 대략 삼각판 형상으로 형성된 한쌍의 연장부(64)가 형성되어 있다. 한쌍의 연장부(64)는 인체 좌우 방향으로 간격을 두고 형성되어 있다. 또한, 각각의 연장부(64)에는, 인체 좌우 방향을 따라 관통 형성된 한쌍의 장착 구멍(66)이 형성되어 있다. 한쌍의 장착 구멍(66)은, 인체 좌우 방향을 따른 동일한 축선을 따라 형성되는 동시에 안쪽 둘레 형상이 인체 측면에서 봤을 때 동일한 원형 형상으로 형성되어 있다.
부재 지지부(18)의 인체 좌우 방향 양측부의 인체 전방측에는, 인체 좌우 방향을 면외 방향으로 하는 대략 삼각판 형상으로 형성된 한쌍의 전측 장착 부재(70)가 배치되어 있다. 전측 장착 부재(70)의 대략 삼각형상을 구성하는 3개의 꼭짓점 부분 중 인체 배면측의 2개의 꼭짓점 부분은, 각각 상면부(42)와 하면부(44)에 볼트 체결되어 있다. 전측 장착 부재(70)의 인체 전방측에 위치하는 나머지의 꼭짓점 부분에는, 인체 좌우 방향을 따라 배치된 대략 원기둥 형상의 제 1 축부(72)가, 한쌍의 전측 장착 부재(70)의 사이에 관통 배치되어 있다. 또한, 전측 장착 부재(70)의 사이에 관통 배치된 제 1 축부(72)의 인체 좌우 방향 양단부에는, 인체 측면에서 봤을 때 대략 타원 판 형상으로 형성된 한쌍의 보조 부재(74)의 한쪽의 단부가, 제 1 축부(72)를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착되어 있다.
제 1 축부(72)에는, 인체 전방측을 향하여 연재된 한쌍의 제 1 부재(76)가 장착되어 있다. 한쌍의 제 1 부재(76)는, 제 1 축부(72)를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 구성되어 있다. 또한, 한쌍의 제 1 부재(76)의 사이(인체 좌우 방향의 내측)에는, 인체 좌우 방향을 따라 형성된 대략 원기둥 형상의 제 1 보조축(78)이 관통 배치되어 있다. 한쌍의 보조 부재(74)의 다른쪽의 단부는, 제 1 보조축(78)의 인체 좌우 방향 양단부에 고정되어 있다.
한쌍의 제 1 부재(76)의 인체 좌우 방향의 내측에는, 한쌍의 제 1 부재(76)를 따라 힘 부가 수단으로서의 가스 스프링(80)이 배치되어 있다. 가스 스프링(80)은, 한쪽의 단부로서의 전측(팔꿈치측)의 단부가, 제 1 부재(76)에 인체 상하 방향으로 회동 가능하게 장착되는 동시에, 다른쪽의 단부로서의 후측(어깨측)의 단부가, 가변부(60)에 인체 상하 방향으로 회동 가능하게 장착되어 있다. 구체적으로, 가스 스프링(80)의 팔꿈치측의 단부는, 한쌍의 제 1 부재(76)의 사이에 인체 좌우 방향을 따라 관통 배치된 축형상의 제 2 보조축(82)에 인체 상하 방향으로 회동 가능하게 장착되어 있다. 또한, 가스 스프링(80)의 어깨측의 단부는, 가변부(60)의 한쌍의 연장부(64)의 장착 구멍(66)의 사이에 배치된 대략 원통형의 제 2 축부(84)에 인체 상하 방향으로 회동 가능하게 장착되어 있다.
가스 스프링(80)은, 팔꿈치측의 단부가, 제 1 부재(76)에 인체 상하 방향으로 회동 가능하게 장착되는 동시에 어깨측의 단부가, 가변부(60)에 인체 상하 방향으로 회동 가능하게 장착되어 있다. 그러므로, 후술하는 바와 같이, 가스 스프링(80)의 신축에 따라 생기는 힘 부가력에 의해 제 1 축부(72) 둘레의 모멘트가 발생한다. 여기서의 모멘트 레버는, 인체 측면에서 봤을 때 제 1 축부(72)로부터 가스 스프링(80)으로 내린 수선의 길이에 상당한다. 이와 같이 가스 스프링(80)이 배치된 완부 보조 장치(10)는, 도 7에 나타나는 바와 같이, 제 1 축부(72)와 가스 스프링(80)이 인체 측면에서 봤을 때 동일 직선 형상이 되는 위치가, 중립점이 된다. 여기서 말하는 중립점이란, 가스 스프링(80)에 의한 힘 부가력과 모멘트 레버의 방향이 일치하기 때문에 제 1 축부(72) 둘레의 모멘트가 생기지 않는 점을 말한다. 완부 보조 장치(10)에서는, 중립점을 경계로 하여 가스 스프링(80)의 힘 부가력의 방향이 인체 전방측과 인체 후방측의 사이에서 반전하기 때문에, 모멘트의 회전 방향도 반전한다.
대략 판 형상으로 형성된 부재 지지부(18)의 하면부(44)의 인체 전방측에는, 스토퍼(86)가 형성되어 있다. 그러므로, 중립점을 넘는 것에 의해 인체 후방측으로 회동하는 제 1 축부(72)는, 스토퍼(86)에 의해 정지된다. 이것에 의해, 중립점을 넘어 상완부(AP)가 인체 후방측으로 회동하는 것을 방지 또는 억제할 수 있다.
부재 지지부(18)의 상면부(42)측에는, 조정부로서의 널링 나사(90)가, 상면부(42)에 관통 형성된 구멍에서 내측을 향하여 삽입 통과되어 있다. 널링 나사(90)는, 그 축부(90B)가 가변부(60)에 형성된 암 나사부(60C)에 나사삽입(螺入)되고, 그 선단은, 하면부(44)에 형성된 미도시의 구멍의 내부에 배치되어 있다. 그러므로, 널링 나사(90)의 머리부(90A)를 회전시킴으로써, 가변부(60)를, 부재 지지부(18)의 내부에 있어서 인체 상방측 또는 인체 하방측으로 이동시킬 수 있다. 또한, 널링 나사(90)를 이용함으로써, 부재 지지부(18)에서의 가변부(60)의 인체 상하 방향의 위치를 무단계로 변경할 수 있다.
(상완 지지부(16))
제 1 부재(76)의 한쪽의 단부로서의 팔꿈치측의 단부에는, 상완 지지부(16)가, 제 1 부재(76)에 대하여 인체 상하 방향으로 회동 가능하게 장착되어 있다. 상완 지지부(16)는, 상완부(AP)의 양측부에 대향하여 배치된 한쌍의 측부재(16A)와, 상완부(AP)의 배면측에 맞닿는 배면측 부재(16B)를 구비하여 구성되어 있다. 한쌍의 측부재(16A)는, 각각 상완부(AP)의 양측부에 대향하여 배치되는 동시에 인체 좌우 방향 외측에 있어서 제 1 부재(76)에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착되어 있다. 또한, 상완 지지부(16)의 상완부(AP)의 정면측은, 장착자(P)의 상완을 직접 끼울 수 있도록 개방되어 있다.
(작용 및 효과)
그 다음, 본 실시 형태의 작용 및 효과에 대하여 설명한다.
본 실시 형태에 따른 완부 보조 장치(10)에 의하면, 도 1에 나타나는 바와 같이, 상완부(AP)를 따라 가스 스프링(80)이 배치되어 있다. 가스 스프링(80)은, 그 한쪽의 단부(팔꿈치측의 단부)가, 제 1 부재(76)에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착되어 있다. 또한, 다른쪽의 단부(어깨측의 단부)가, 가변부(60)의 연장부(64)에 축방향을 인체 좌우 방향으로 하여 설치된 제 2 축부(84)를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착되어 있다. 장착자(P)가, 인체 전방측으로 팔을 회동했을 때, 즉, 팔을 들어 올렸을 때에, 제 1 부재(76)는, 제 1 축부(72) 둘레에 인체 전방측으로 회동하는 동시에, 가스 스프링(80)의 팔꿈치측의 단부는, 인체 전방측으로 이동한다. 그러므로, 가스 스프링(80)의 팔꿈치측의 단부로부터 어깨측의 단부까지의 거리, 즉, 가스 스프링(80)의 길이가 변하고, 이것에 따라 제 1 부재에는, 보조력으로서의 제 1 축부(72) 둘레의 모멘트가 발생한다(작용한다). 이것에 의해, 장착자의 작업성을 향상시킬 수 있다.
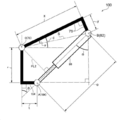
여기서, 모멘트의 모멘트 레버(M)는, 도 4 및 도 5에 모식적으로 나타난 역학 모델에 근거하여 계산할 수 있다. 도 4에는, 팔을 인체 수평 방향을 따라 편 상태를 0도로 하고, 거기서부터 각도 θ(도 5 참조)만큼 상완부(AP)를 들어 올린 장착자(P)와 제 1 부재(76), 가변부(60) 및 가스 스프링(80)의 인체 측면측에서 본 위치 관계가 모식적으로 나타나 있다. 여기서, 가스 스프링(80)이, 제 2 축부(84)에 장착되어 있는 위치(점)를 점 A로 하고, 제 2 보조축(82)에 장착되어 있는 위치(점)를 점 B로 한다. 또한, 제 1 축부(72)가 설치되어 있는 위치(점)를 점 C로 한다.
도 5에는, 도 4에 나타난 모식적인 위치 관계의 확대도가 나타나 있다. 모멘트 레버(M)는, 인체 측면에서 봤을 때 제 1 축부(72)로부터 가스 스프링(80)으로 내린 수선(PL)의 길이에 상당한다. 제 1 축부(72)와 제 2 축부(84)의 거리(직선 L1의 길이)를 r로 하면, 모멘트 레버(M)는,
M=r×cos(θ+β)
로 표현된다.
각도(θ+β)는, 수선(PL)과 직선(L1)이 이루는 각도이다. 또한, β는, 제 1 부재(76), 가변부(60) 및 가스 스프링(80)의 기하적 관계로부터 정해지는 각도이며, 2×E×D×cosβ=E2+D2-F2의 코사인 정리(餘弦定理)에 근거하는 관계를 만족한다. 여기서, D는, 가스 스프링(80)의 길이를 나타내고, E는, 점 B로부터 제 1 부재(76)의 연재 방향을 따라 직선(L1)까지 그은 보조선(L2)의 길이를 나타내고, F는, 직선 L2와 직선 L1의 교점으로부터 점 A까지의 거리를 나타낸다.
또한, 인체 상방측으로 각도 θ만큼 상완부(AP)를 들어 올린 상태에서의 가스 스프링(80)의 길이(D)는,
D2={r+s×sin(θ-α)}2+{s×cos(θ-α)}2
로 표현된다. s는, 점 B와 점 C의 위치 관계에 근거하여, s2=x2+y2로 표현된다. 여기서, x는, 제 1 부재(76)의 연재 방향에서의 점 B와 점 C의 거리, y는, 제 1 부재(76)의 연재 방향과 직교하는 방향에서의 점 B와 점 C의 거리를 나타낸다. 또한, α도 점 B와 점 C의 위치 관계에 근거하여 정해지는 각도이며, tanα=y/x의 관계를 만족한다.
도 6에는, 상완부(AP)의 회전 각도와 완부 보조 장치에 의해 얻어지는 보조력의 관계를 나타내는 그래프가 나타나 있다. 가로축에는, 상완부(AP)의 회전 각도가 나타나 있다. 여기서는, 상완부(AP)의 회전 각도는, 상완부(AP)를 인체 수평 방향을 따라 폈을 경우를 0도로 하고, 상완부(AP)를 인체 상방측으로 들어 올렸을 경우를 양으로 정의한다. 세로축에는, 보조력으로서의 모멘트가 나타나 있다. 도 6에는, 널링 나사(90)를 이용하여 가변부(60)의 위치를 변경한 3케이스의 모멘트가 나타나 있다. 구체적으로, 가변부(60)를 부재 지지부(18)의 인체 상방측으로 이동하여 제 1 축부(72)에 접근시켰을 경우(C1), 부재 지지부(18)의 인체 하방측으로 이동하여 제 1 축부(72)로부터 멀어지게 했을 경우(C2) 및 부재 지지부(18)의 인체 상하 방향 대략 중간부에 위치시켰을 경우(C3)의 3케이스이다. 이러한 점에서, 가변부(60)를 부재 지지부(18) 내부에서 이동시켜 제 1 축부(72)와 제 2 축부(84)의 거리(r)를 변화시킴으로써, 보조력이 생기는 모멘트의 범위를 증가 또는 감소시킬 수 있는 것을 알 수 있다. 이것에 의해, 상완부(AP)의 회전을 보조하기 위한 모멘트의 범위를 변경할 수 있다.
또한, 본 실시 형태에 따른 완부 보조 장치(10)에 의하면, 부재 지지부(18)에는, 제 1 축부(72)와의 거리를 변경 가능한 가변부(60)와 조작에 의해 부재 지지부(18)에서의 가변부(60)의 위치를 변경하는 널링 나사(90)가 설치되어 있다. 그러므로, 부재 지지부(18)에서의 가변부(60)의 위치를 변경함으로써, 가변부(60)에 회동 가능하게 장착된 가스 스프링(80)의 어깨측의 단부를 이동시킬 수 있다. 가스 스프링(80)의 어깨측의 단부를 이동시킴으로써 제 1 축부(72)로부터 가스 스프링(80)까지의 거리, 즉, 인체 측면에서 봤을 때 제 1 축부(72)로부터 가스 스프링(80)으로 내린 수선의 길이가 변하기 때문에, 가스 스프링(80)에 의해 발생하는 모멘트의 모멘트 레버가 변한다. 이것에 의해, 가스 스프링(80)을 바꾸어 달지 않고 상완부(AP)의 회전을 보조하기 위한 모멘트의 범위를 변경할 수 있다.
또한, 조정부에는 널링 나사(90)를 이용하고 있으므로, 부재 지지부(18)에서의 가변부(60)의 인체 상하 방향의 위치를 무단계로 변경할 수 있다. 이것에 의해, 작업 목적에 따라 보조력으로서의 모멘트의 범위를 적절히 변경할 수 있다.
도 7에는, 완부 보조 장치(10)가 중립점에 있는 상태가 나타나 있다. 본 실시 형태에 따른 완부 보조 장치(10)에 의하면, 가스 스프링(80)은, 중립점을 넘으면 힘 부가 방향이 인체 후방측으로 반전하기 때문에, 상완부(AR)를 인체 후방측으로 회전시켰을 때에, 상완부(AR)를 인체 후방측을 향하여 회동시키는 모멘트가 생긴다. 이것에 대하여, 부재 지지부(18)는, 장착자(P)의 상완부(AR)의 인체 후방측으로의 회전에 대하여 제 1 부재(76)를 정지시키기 위한 스토퍼(86)를 하면부(44)에 구비하고 있다. 그러므로, 예를 들어, 모멘트가 강해지도록 가변부(60)를 조정했을 경우에도, 도 8에 나타나는 바와 같이, 상완부(AR)가 인체 후방측으로 강한 모멘트로 회동하는 것을 방지 또는 억제할 수 있다. 또한, 모멘트의 힘 부가 방향이 반전하는 경계가 되는 중립점에서는 보조력이 생기지 않게 되므로, 예를 들어, 제 1 부재(76)가 인체 상하 방향을 따라 배치된 상태를 중립점으로 설정함으로써, 완부 보조 장치(10)의 장착자(P)는, 상완부(AP)를 내린 상태로 용이하게 장착할 수 있다.
또한, 본 실시 형태에 따른 완부 보조 장치(10)에 의하면, 상완부(AP)의 정면측이 개방된 상완 지지부(16)의 한쌍의 측부재(16A)에는, 인체 좌우 방향 외측에 있어서 제 1 부재(76)가 장착되어 있다. 그러므로, 상완부(AP)의 정면측이 개방된 상태에서도 한쌍의 측부재(16A)와 배면측 부재(16B)에 의해 상완부(AP)를 안정적으로 유지할 수 있다. 또한, 상완부(AP)의 정면측을 개방시키고 있으므로 완부 보조 장치(10)의 탈부착을 용이하게 할 수 있는 동시에, 상완부(AP)가 구속되지 않으므로 장착자(P)는, 널링 나사(90)를 용이하게 조작할 수 있다.
이상 설명한 바와 같이, 본 실시 형태에 따른 완부 보조 장치(10)는, 가스 스프링(80)을 바꾸어 달지 않고 팔의 회전을 보조하기 위한 보조력의 범위를 변경할 수 있다.
또한, 본 실시 형태에 따른 완부 보조 장치(10)에 의하면, 상체 지지부(14)의 인체 상방측에는, 인체 좌우 방향의 길이를 조정 가능한 암부(36)가 배치되어 있다. 그러므로, 장착자(P)의 체형에 맞추어 암(36B)의 길이를 조정함으로써, 부재 지지부(18)와 이것에 장착된 제 1 부재(76)를 적절한 위치에서 장착자(P)의 상완부(AP)의 측방측에 배치시킬 수 있다. 이것에 의해, 장착자(P)의 상완부(AP)에 적절히 보조력을 부여할 수 있다.
또한, 본 실시 형태에 따른 완부 보조 장치(10)에 의하면, 상체 지지부(14)의 인체 하방측에는, 장착자(P)의 허리 둘레 방향을 따라 띠형상으로 형성되는 동시에, 장착자(P)의 허리에 고정 가능한 허리부 지지부(12)가 배치되어 있다. 그러므로, 부재 지지부(18)를 구비한 완부 보조 장치(10)를 안정적으로 장착자(P)에게 장착시킬 수 있다. 이것에 의해, 장착자(P)의 상체부(UB)를 안정적으로 유지한 상태로 상완부(AP)에 적절히 보조력을 부여할 수 있다.
또한, 본 실시 형태에 따른 완부 보조 장치(10)에 의하면, 상체 지지부(14)는, 인체 상하 방향의 높이를 조절 가능한 슬라이드부(26)를 구비하고 있다. 그러므로, 장착자(P)의 체형에 맞추어 상체 지지부(14)의 높이를 조정함으로써, 부재 지지부(18)를 구비한 완부 보조 장치(10)를 적절한 위치에서 장착자(P)에게 장착시킬 수 있다. 이것에 의해, 장착자(P)의 상완에 적절히 보조력을 부여할 수 있다.
(제 2 실시 형태)
그 다음, 도 9를 이용하여, 본 발명에 따른 완부 보조 장치의 제 2 실시 형태에 대하여 설명한다. 그리고, 전술한 제 1 실시 형태와 동일 구성 부분에 대해서는, 동일 번호를 붙이고 그 설명을 생략한다.
도 9에는, 본 실시 형태에 따른 일례로서의 완부 보조 장치(100)를 장착한 장착자(P)가, 팔을 인체 수평 방향을 따라 편 상태를 0도로 하고, 거기서부터 인체 상방측으로 각도 θ만큼 상완부(AP)를 들어 올렸을 때의 제 1 부재(76), 가변부(60) 및 가스 스프링(80)의 인체 측면측에서 본 위치 관계가 모식적으로 나타나 있다. 여기서는, 가변부(60)에는, 제 1 실시 형태의 연장부(64)보다 인체 전방측(팔꿈치측)으로 연재된 연장부(164)가 배치되어 있다. 그러므로, 인체 좌우 방향을 따라 연장부(164)에 장착되고, 가스 스프링(80)의 어깨측의 단부가 연결된 제 3 축부(184)는, 제 1 실시 형태에서의 위치보다 소정의 길이(t)만큼 인체 전방측(팔꿈치측)에 배치되어 있다.
모멘트의 모멘트 레버(M)는, 도 9에 모식적으로 나타난 역학 모델에 근거하여 계산할 수 있다. 여기서, 가스 스프링(80)이, 제 3 축부(184)에 장착되어 있는 위치(점)를 점 A로 하고, 제 2 보조축(82)에 장착되어 있는 위치(점)를 점 B로 한다. 또한, 제 1 축부(72)가 설치되어 있는 위치(점)를 점 C로 한다.
모멘트 레버(M)는, 인체 측면에서 봤을 때 제 1 축부(72)로부터 가스 스프링(80)으로 내린 수선(PL2)의 길이에 상당한다. 제 1 축부(72)와 제 3 축부(184)의 거리(직선 L1의 길이)를 r로 하면, 모멘트 레버(M)는,
M=r×{s×cos(θ-α)-t}/D+t×{s×sin(θ-α)+r}/D
로 표현된다. 여기서, 가스 스프링(80)의 길이(D)는, 도 9 중의 각(φ)을 포함하는 2개의 서로 비슷한 삼각형에 근거하여,
D2={r+s×sin(θ-α)}2+{s×cos(θ-α)-t}2
로 표현된다. s는, 점 B와 점 C의 위치 관계에 근거하여, s2=x2+y2로 표현된다. x는, 제 1 부재(76)의 연재 방향에서의 점 B와 점 C의 거리, y는, 제 1 부재(76)의 연재 방향과 직교하는 방향에서의 점 B와 점 C의 거리를 나타낸다. 또한, α도 점 B와 점 C의 위치 관계에 근거하여 정해지는 각도이며, tanα=y/x의 관계를 만족한다.
이러한 점에서, 가변부(60)에 인체 전방측으로 연재된 연장부(164)를 마련하고, 제 3 축부(184)를 팔꿈치측으로 이동시킴으로써, 보조력으로서의 모멘트를 증가시킬 수 있는 것을 알 수 있다. 이것에 의해, 상완부(AP)의 회전을 보조하기 위한 모멘트의 범위를 변경할 수 있다.
본 실시 형태에 따른 완부 보조 장치(100)에 의하면, 가스 스프링(80)의 다른쪽의 단부(어깨측의 단부)는, 가변부(60)로부터 장착자(P)의 팔꿈치측을 향하여 연재된 연장부에 축방향을 인체 좌우 방향으로 하여 설치된 제 3 축부(184)를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착되어 있다. 그러므로, 가스 스프링(80)의 다른쪽의 단부의 위치가 되는 제 3 축부(184)의 위치가 가변부(60)로부터 인체 전방측으로 이동하여, 제 1 축부(72)와 가스 스프링(80)의 거리가 변한다. 이것에 의해, 가스 스프링(80)을 바꾸어 달지 않고 팔의 회전을 보조하기 위한 보조력으로서의 모멘트의 범위를 보다 넓은 범위로 조정할 수 있다.
(제 3 실시 형태)
그 다음, 도 10~도 19를 이용하여, 본 발명에 따른 완부 보조 장치의 제 3 실시 형태에 대하여 설명한다. 그리고 전술한 제 1 실시 형태 또는 제 2 실시 형태와 동일 구성 부분에 대해서는, 동일 번호를 붙이고 그 설명을 생략한다.
우선, 도 10~도 16을 이용하여, 완부 보조 장치(200)의 구성에 대하여 설명한다. 도 10은, 완부 보조 장치(200)를 장착자(P)에게 장착한 상태를 나타내는 측면도이다. 도 11은, 완부 보조 장치(200)를 장착자(P)에게 장착한 상태를 나타내는 정면도이다. 도 12는, 완부 보조 장치(200)를 장착자(P)에게 장착한 상태를 나타내는 배면도이다.
도 13은, 완부 보조 장치(200)의 상완 지지부(16) 주변을 나타내는 부분 확대 사시도이다. 도 14는, 완부 보조 장치(200)를 장착자(P)에게 장착한 상태를 나타내는 배면도이며, (A)는 상체 지지부(250)의 길이를 길게 한 상태를 나타내고, (B)는 상체 지지부(250)의 길이를 짧게 한 상태를 나타낸다. 도 15는, 완부 보조 장치(200)를 장착자(P)에게 장착한 상태를 나타내는 배면도이며, (A)는 팔을 전방을 향하게 하여 배면 연결 부재(270)를 편 상태를 나타내고, (B)는 팔을 옆으로 펼쳐 배면 연결 부재(270)를 접은 상태를 나타낸다. 도 16은, 완부 보조 장치(200)의 장착자(P)에 대한 탈부착을 설명하는 사시도이며, (A)는 상완 지지부(16)가 후크 앤드 루프 패스너(290)로 어깨 벨트(280)에 연결되어 있는 상태를 나타내고, (B)는 상완 지지부(16)가 후크 앤드 루프 패스너(290)로 상완에 감겨져 있는 상태를 나타낸다.
도 10~도 12에 나타내는 완부 보조 장치(200)는, 좌우 대칭이 되도록 구성되어 있고, 장착자(P)가 배낭과 같이 짊어져 혼자서 장착함으로써, 장착자(P)의 상반신에 장착된다. 이 완부 보조 장치(200)는, 장착자(P)의 양팔의 부하 각각에 대해, 가스 스프링(힘 부가 수단)(80)에 의해 보조력을 발생시킨다.
구체적으로, 완부 보조 장치(200)는, 좌우 한쌍의 부재 지지부(210)와, 좌우 한쌍의 제 1 부재(220)와, 좌우 한쌍의 상완 지지부(16)와, 좌우 한쌍의 회동 제한 부재(230)(도 13 등 참조)와, 좌우 한쌍의 가스 스프링(80)과, 좌우 한쌍의 록 기구(도시 생략)와, 좌우 한쌍의 암부(240)와, 좌우 한쌍의 상체 지지부(250)와, 띠부(260)와, 배면 연결 부재(270)와, 좌우 한쌍의 어깨 벨트(280)와, 스트랩(285)과, 좌우 한쌍의 후크 앤드 루프 패스너(고정구)(290) 등을 구비하고 있다.
좌우 한쌍의 부재 지지부(210)는, 각각, 장착자(P)의 상체를 배면측으로부터 지지하는 좌우 한쌍의 상체 지지부(250) 각각에 대하여, 좌우 한쌍의 암부(240) 각각을 통하여 장착되어 있는 것에 의해, 장착자(P)의 좌우 상완의 측방측에 배치된다. 이들 좌우 한쌍의 부재 지지부(210)는, 각각, 상완을 따라 배치된 제 1 부재(220) 및 가스 스프링(80)을 이들의 기단(基端)부측에서 지지한다.
좌우 한쌍의 제 1 부재(220)는, 각각, 상완의 측방측을 따라 배치되고, 부재 지지부(210)에 축방향을 인체 좌우 방향으로 하여 설치된 제 1 축부(221)(도 14, 도 15, 도 19 등 참조)를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 되어 있다. 이들 좌우 한쌍의 제 1 부재(220)는, 각각, 상완을 지지하는 상완 지지부(16)를 선단에 장착하고 있다.
도 13에 나타내는 바와 같이, 상완 지지부(16)는, 제 1 부재(220)의 선단에, 축방향을 인체 좌우 방향으로 하여 회동 가능하게 장착되어 있다. 이 상완 지지부(16)는, 각각 상완의 양측부에 대향하여 배치되는 동시에 인체 좌우 방향 외측에 있어서 제 1 부재(220)에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착된 한쌍의 측부재(16A)와, 한쌍의 측부재(16A)의 인체 후방측 단부에 걸쳐 형성되고, 상완의 배면측에 맞닿는 배면측 부재(16B)를 구비하고, 상완의 정면측이 개방되어 있다. 또한, 상완 지지부(16)는, 회동 제한 부재(230)에 의해, 소정 위치로부터의 인체 상방향으로의 회동이 제한되어 있다. 그리고, 상완 지지부(16)는, 후술하는 바와 같이, 쿠션성을 갖는 커버(16C)(도 16(A) 및 도 16(B) 참조)에 의해 덮인다.
회동 제한 부재(230)는, 소정 위치로부터의 상완 지지부(16)의 인체 상방향으로의 회동을 제한한다. 구체적으로, 회동 제한 부재(230)는, 상완 지지부(16)에서의 제 1 부재(220)측의 측 부재(16A)에 장착된 핀으로, 제 1 부재(220)에 맞닿음으로써 상완 지지부(16)의 회동을 제한한다.
도 10~도 12로 돌아와 설명한다. 좌우 한쌍의 가스 스프링(80)은, 각각, 상완의 측방측을 따라 제 1 부재(220)의 하부에 배치되고, 한쪽의 단부인 선단이, 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 제 1 부재(220)의 선단에 장착되는 동시에, 다른쪽의 단부인 기단이, 부재 지지부(210)에 직접적으로, 축방향을 인체 좌우 방향으로 하여 설치된 제 2 축부(222)를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착되어 있다. 이들 좌우 한쌍의 가스 스프링(80)은, 장착자(P)의 팔에 힘을 가한다. 가스 스프링(80)에 의한 장착자(P)의 팔의 힘 부가에 대한 자세한 것은, 후술한다.
좌우 한쌍의 록 기구(도시 생략)는, 장착자(P)의 팔의 인체 후방측으로의 회전에 대하여 제 1 부재(220)를 정지시키기 위한 기구이다.
좌우 한쌍의 암부(240)는, 각각, 좌우 한쌍의 상체 지지부(250) 각각의 상방측에 인체 좌우 방향을 따라 형성되는 동시에, 장착자(P)의 어깨의 측방측으로부터 좌우 한쌍의 부재 지지부(210) 각각에 연결되어 있다. 보다 구체적으로 암부(240)는, 각각 상체 지지부(250)로부터 좌우로 서로 멀어지도록 연장되고, 소정 위치에 있어서, 전방향으로 각각 만곡되어 있어, 삼각근의 후부에서 측부에 걸친 부분을 둘러싸는 것 같은 형상을 갖고 있다.
좌우 한쌍의 상체 지지부(250)는, 각각, 좌우 한쌍의 부재 지지부(210) 각각의 인체 하방측에 설치되어, 장착자(P)의 상체를 배면측으로부터 지지한다. 이들 좌우 한쌍의 상체 지지부(250)는, 장착자(P)의 배면측에 있어서 인체 상하 방향을 따라 좌우에 쌍으로 배치되고, 각각의 하단이, 회전에 대한 3개의 자유도를 갖도록 띠부(260)에 장착되어 있는 동시에, 각각의 상단이, 띠형상의 고무에 의해 구성되는 배면 연결 부재(270)에 의해 서로 연결되어 있다. 여기서, 회전에 대한 3개의 자유도를 갖는다는 것은, 전후 방향, 좌우 방향, 및, 상하 방향의 3개의 방향으로 각각 지향하는 축심을 중심으로 하여 회전 가능한 것을 의미한다.
보다 구체적으로, 상체 지지부(250)의 하단은, 전방으로 돌출하는 미도시의 구형 부재가 고정되어 설치되어 있는 원형단(端) 부재(2505)를 구비하고 있다. 미도시의 구형 부재는, 띠부(260)에 고정된 기부 금구(金具)(2601)에 형성된 구멍으로서, 내부가 개구보다 넓은 원형의 구멍에 끼워져 있다. 해당 구멍의 내부에 있어서 미도시의 구형 부재가 기부 금구(2601)에 대하여 슬라이딩(摺動)하여 회전함으로써, 상체 지지부(250)는, 기부 금구(2601)에 대하여, 회전에 대한 3개의 자유도를 갖도록, 기부 금구(2601)에 지지되어 있다.
도 14(A) 및 도 14(B)에 나타내는 바와 같이, 좌우 한쌍의 상체 지지부(250)는, 각각, 길이의 조절이 가능하다. 구체적으로, 상체 지지부(250)에는, 복수의 관통공이 등간격으로 상체 지지부(250)의 길이 방향으로 형성된 외측관(2501)과, 외측관(2501)의 안쪽 둘레면에 의해 형성되는 내부 공간에 배치되고, 외측관(2501)에 대하여 동축적인 위치 관계로 슬라이딩하는 내측관(2502)을 갖고 있다. 내측관(2502)에는, 내측관(2502)의 바깥쪽으로 미도시의 스프링에 의해 힘이 가해져 돌출하는 구상 부재(2503)가 설치되어 있다. 구상 부재(2503)가, 외측관(2501)의 관통공에 맞물림으로써, 내측관(2502)은, 외측관(2501)에 대하여 고정되도록 구성되어 있다.
도 10~도 12로 돌아와 설명한다. 띠부(260)는, 장착자(P)의 허리 둘레 방향을 따라 띠형상으로 형성되는 동시에, 장착자(P)의 허리에 고정 가능하다. 이 띠부(260)는, 장착자(P)의 전방측에 버클(261)을 갖고 있어 탈부착 가능하게 되어 있고, 일반적인 배낭의 허리 벨트와 동일한 기능을 한다.
도 15(A) 및 도 15(B)에 나타내는 바와 같이, 배면 연결 부재(270)는, 좌우 한쌍의 상체 지지부(250) 각각에서의 상방에 있어서, 해당 좌우 한쌍의 상체 지지부(250)를 서로 연결하고, 장착자(P)의 상체를 배면측으로부터 신축 가능하게 지지한다.
도 10~도 12로 돌아와 설명한다. 좌우 한쌍의 어깨 벨트(280)는, 인체 상하 방향을 따라 좌우에 쌍으로 배치되고, 각각의 하단이 띠부(260)에서의 인체 전방측에 장착되는 한편, 각각의 상단이 배면 연결 부재(270)에 장착되어 있다. 이러한 좌우 한쌍의 어깨 벨트(280)는, 일반적인 배낭의 숄더 하니스와 동일한 기능을 한다.
스트랩(285)은, 장착자(P)의 가슴 근처에서 좌우 한쌍의 어깨 벨트(280)를 서로 연결하고, 장착자(P)의 상체를 전방측에서 지지한다. 이 스트랩(285)은, 버클(286)을 갖고 있어 탈부착 가능하도록 되어 있고, 일반적인 배낭의 가슴 스트랩과 동일한 기능을 한다.
도 16(A) 및 도 16(B)에 나타내는 바와 같이, 좌우 한쌍의 후크 앤드 루프 패스너(290)는, 각각, 좌우 한쌍의 상완 지지부(16)를 덮는 커버(16C)에 장착되어 있다. 이들 좌우 한쌍의 후크 앤드 루프 패스너(290)는, 각각, 상완 지지부(16)를 어깨 벨트(280)에 탈부착 가능하게 장착하는(도 16(A) 참조) 동시에, 상완에 탈부착 가능하게 감김으로써 상완 지지부(16)를 상완에 고정한다(도 16(B) 참조).
그 다음, 도 17을 이용하여, 완부 보조 장치(200)와 장착자(P)의 위치 관계에 대하여 설명한다.
도 17은, 완부 보조 장치(200)와 장착자(P)의 위치 관계를 나타내는 모식도이다.
가스 스프링(80)에 의해 발생하는 모멘트의 모멘트 레버(M)는, 도 17에 나타내는 역학 모델에 근거하여 계산할 수 있다. 여기서, 가스 스프링(80)이 제 2 축부(222)에 장착되어 있는 위치(점)를 점 A로 하고, 가스 스프링(80)이 제 1 부재(220)의 선단에 장착되어 있는 위치(점)를 점 B로 한다. 또한, 제 1 부재(220)가 제 1 축부(221)에 장착되어 있는 위치(점)를 점 C로 한다.
모멘트 레버(M)는, 인체 측면에서 봤을 때 제 1 축부(221)로부터 가스 스프링(80)으로 내린 수선(PL3)의 길이에 상당한다. 점 A와 점 B의 연직 방향의 거리를 r로 하고, 점 B와 점 C의 거리를 s로 하고, 점 A와 점 B의 수평 방향의 거리를 t로 하면, 모멘트 레버(M)는,
M=r×(s×cosθ―t)/D+t×(s×sinθ+r)/D
로 표현된다. 여기서, 가스 스프링(80)의 길이(D)는, 도 17 중의 각(φ)을 포함하는 2개의 서로 비슷한 삼각형에 근거하여,
D2=(r+s×sinθ)2+(s×cosθ―t)2
로 표현된다. 그리고, 본 실시 형태에 있어서, s=200 mm이며, t=12 mm이며, r=20 mm인 것이 바람직하다.
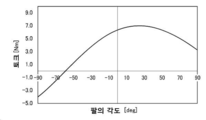
그 다음, 도 18 및 도 19를 이용하여, 완부 보조 장치(200)에 의해 얻어지는 보조력과 팔의 회전 각도의 관계에 대하여 설명한다. 도 18은, 완부 보조 장치(200)에 의해 얻어지는 보조력과 팔의 회전 각도의 관계를 나타내는 그래프이다. 도 19는, 완부 보조 장치(200)를 나타내는 측면도이며, (A)는 양의 각도에 위치한 상태를 나타내고, (B)는 -60도에 위치한 상태를 나타내고, (C)는 -90도에 위치한 상태를 나타낸다. 그리고, 설명에 불필요한 구성의 도시를 적절히 생략한다.
도 18에 있어서, 가로축에는, 상완부의 회전 각도가 나타나 있다. 여기서는, 상완부의 회전 각도는, 상완부를 인체 수평 방향을 따라 폈을 경우를 0도로 하고, 상완부를 인체 상방측으로 들어 올렸을 경우를 양으로 정의한다. 세로축에는, 보조력으로서의 모멘트가 나타나 있다. 도 18에 나타내는 바와 같이, 가스 스프링(80)에 의한 장착자(P)의 팔에 힘을 가하는 토크는, -90도인 경우에 음의 값(-4.0[N·m])이고, -60도의 중립점인 경우에 0[N·m]이고, 0도 초과 90도 미만의 소정 각도(20도)인 경우에 최대치가 되는 양의 값(7.0[N·m])이고, 90도인 경우에 양의 값(3.5[N·m])인 한편, -90도 내지 90도의 범위에서 변동하는 것에 따라 값이 매끄럽게 변동한다.
도 19(A)에 나타내는 바와 같이, 제 1 부재(220)가 양의 각도에 위치하는 경우, 상방을 향한 보조력이 생기고 있다. 도 19(B)에 나타내는 바와 같이, 제 1 부재(220)가 -60도의 중립점에 위치하는 경우, 보조력은 생기지 않는다. 도 19(C)에 나타내는 바와 같이, 제 1 부재(220)가 -90도에 위치하는 경우, 인체 후방측을 향한 보조력이 생기지만, 록 기구(도시 생략)에 의해 고정되어 제 1 부재(220)가 정지된다.
이와 같이, 완부 보조 장치(200)는, 장착자(P)의 상완의 측방측에 배치된 부재 지지부(210)와, 부재 지지부(210)의 인체 하방측에 설치되고, 장착자(P)의 상체를 배면측으로부터 지지하는 상체 지지부(250)와, 상완을 따라 배치되고, 부재 지지부(210)에 축방향을 인체 좌우 방향으로 하여 설치된 제 1 축부(221)를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 된 제 1 부재(220)와, 제 1 부재(220)의 한쪽의 단부에 장착되어 상완을 지지하는 상완 지지부(16)와, 상완을 따라 배치되고, 한쪽의 단부가, 제 1 부재(220)에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착되는 동시에, 다른쪽의 단부가, 부재 지지부(210)에 직접적으로, 축방향을 인체 좌우 방향으로 하여 설치된 제 2 축부(222)를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착되어, 장착자(P)의 팔에 힘을 가하는 가스 스프링(80)을 포함하여 구성되어 있다.
이러한 완부 보조 장치(200)에 의하면, 상완을 따라 가스 스프링(80)이 배치되어 있다. 가스 스프링(80)은, 그 한쪽의 단부가, 제 1 부재(220)에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착되어 있다. 또한, 다른쪽의 단부가, 부재 지지부(210)에 직접적으로, 축방향을 인체 좌우 방향으로 하여 설치된 제 2 축부(222)를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착되어 있다. 완부 보조 장치(200)를 장착한 장착자(P)가, 인체 전방측으로 팔을 회동했을 때, 즉, 팔을 들어 올렸을 때에, 제 1 부재(220)는, 제 1 축부(221) 둘레에 인체 전방측으로 회동하는 동시에, 가스 스프링(80)의 한쪽의 단부는, 인체 전방측으로 이동한다. 그러므로, 가스 스프링(80)의 한쪽의 단부로부터 다른쪽의 단부까지의 거리, 즉, 가스 스프링(80)의 길이가 변하고, 이것에 따라 힘 부가력이 발생한다. 이 힘 부가력에 의해, 제 1 부재(220)에는, 제 1 축부(221) 둘레의 모멘트가 작용한다. 여기서는, 모멘트 레버는, 제 1 축부(221)로부터 가스 스프링(80)까지의 거리에 의해 정해진다. 구체적으로, 인체 측면에서 봤을 때 제 1 축부(221)로부터 가스 스프링(80)으로 내린 수선의 길이가 모멘트 레버에 상당한다. 이것에 의해, 완부 보조 장치(200)를 장착한 장착자(P)의 팔의 회전을 보조하기 위한 보조력을 발생시킬 수 있다. 이것에 의해, 장착자(P)의 작업성을 향상시킬 수 있다.
또한, 완부 보조 장치(200)에 있어서, 장착자(P)의 팔의 회전 각도에 대하여, 장착자(P)의 팔이 수평으로 펼쳐졌을 경우를 0도로 하고, 장착자(P)의 팔이 상방측으로 들어 올려진 경우를 양으로 정의하는 경우에 있어서, 가스 스프링(80)에 의한 장착자(P)의 팔에 힘을 가하는 토크는, -90도인 경우에 음의 값이고, 0도 초과 90도 미만의 소정 각도인 경우에 최대치가 되는 양의 값이고, 90도인 경우에 양의 값인 한편, -90도 내지 90도의 범위에서 변동하는 것애 따라 값이 매끄럽게 변동한다.
이러한 완부 보조 장치(200)에 의하면, 가스 스프링(80)에 의한 장착자(P)의 팔에 힘을 가하는 토크가, -90도인 경우에 음의 값이고, 0도 초과 90도 미만의 소정 각도인 경우에 최대치가 되는 양의 값이고, 90도인 경우에 양의 값인 한편, -90도 내지 90도의 범위에서 변동하는 것에 따라 값이 매끄럽게 변동하므로, 장착자(P)의 부하에 대하여 보조력이 강하여, 탈진했을 경우에도 팔이 내려지는 것을 방지할 수 있다. 또한, 보조력이 반전하는 경계가 되는 중립점에서는 보조력이 생기지 않게 되므로, 완부 보조 장치를 장착하는 장착자(P)는, 중립점이 되는 상태로 용이하게 장착할 수 있다.
또한, 중립점보다 -90도에 가까워지는 범위에서는, 보조력은 음의 값이 되기 때문에, 마루에 떨어뜨린 것을 줍는 경우 등, 장착자(P)가 하방으로 손을 뻗고자 할 때에, 상방향으로의 보조력이 저해되는 것을 회피할 수 있어, 용이하게 뻗는 것을 가능하게 한다.
또한, 완부 보조 장치(200)는, 장착자(P)의 팔의 인체 후방측으로의 회전에 대하여 제 1 부재(220)를 정지시키기 위한 록 기구(도시 생략)를 구비하고 있다.
이러한 완부 보조 장치(200)에 의하면, 장착자(P)의 팔의 인체 후방측으로의 회전에 대하여 제 1 부재(220)를 정지시키기 위한 록 기구(도시 생략)를 구비하고 있으므로, 팔이 인체 후방측으로 강한 보조력으로 회동하는 것을 방지 또는 억제할 수 있다.
또한, 완부 보조 장치(200)는, 장착자(P)의 허리 둘레 방향을 따라 띠형상으로 형성되는 동시에, 장착자(P)의 허리에 고정 가능한 띠부(260)를 구비하고, 상체 지지부(250)는, 인체 상하 방향을 따라 좌우에 쌍으로 배치되는 동시에, 각각의 하단이, 회전에 대한 3개의 자유도를 갖도록 띠부(260)에 장착되어 있다.
이러한 완부 보조 장치(200)에 의하면, 상체 지지부(250)가, 인체 상하 방향을 따라 좌우에 쌍으로 배치되는 동시에, 각각의 하단이, 회전에 대한 3개의 자유도를 갖도록 띠부(260)에 장착되어 있으므로, 허리에 고정된 띠부(260)에 대하여 상체 지지부(250)를 유연하게 움직일 수 있다.
또한, 완부 보조 장치(200)에 있어서, 한쌍의 상체 지지부(250)는, 각각, 길이의 조절이 가능하다.
이러한 완부 보조 장치(200)에 의하면, 한쌍의 상체 지지부(250)가, 각각, 길이의 조절이 가능하므로, 장착자(P)의 신장에 따라 한쌍의 상체 지지부(250)의 길이를 조절할 수 있고, 또한, 상체 지지부(250)의 길이를 조절함으로써, 허리에 고정되는 띠부(260)의 위치를 조절할 수 있다.
또한, 완부 보조 장치(200)는, 한쌍의 상체 지지부(250) 각각에서의 상방에 있어서, 한쌍의 상체 지지부(250)를 서로 연결하고, 장착자(P)의 상체를 배면측으로부터 신축 가능하게 지지하는 배면 연결 부재(270)를 구비하고 있다.
이러한 완부 보조 장치(200)에 의하면, 한쌍의 상체 지지부(250) 각각에서의 상방에 있어서, 해당 한쌍의 상체 지지부(250)를 서로 연결하고, 장착자(P)의 상체를 배면측으로부터 신축 가능하게 지지하는 배면 연결 부재(270)를 구비하고 있으므로, 팔을 전방을 향하거나 옆으로 펴거나 함으로써 배면 연결 부재(270)가 신축하여, 한쌍의 상체 지지부(250)를 유연하게 움직일 수 있다.
또한, 완부 보조 장치(200)는, 상체 상하 방향을 따라 좌우에 쌍으로 배치되고, 각각의 하단이 띠부(260)에서의 인체 전방측에 장착되는 한편, 각각의 상단이 배면 연결 부재(270)에 장착된 어깨 벨트(280)를 구비하고 있다.
이러한 완부 보조 장치(200)에 의하면, 상체 상하 방향을 따라 좌우에 쌍으로 배치되어 있는 어깨 벨트(280)를 구비하고 있으므로, 장착자(P)는 완부 보조 장치(200)를 배낭과 같이 짊어져 혼자서 장착할 수 있다.
또한, 완부 보조 장치(200)는, 상완 지지부(16)를 어깨 벨트(280)에 탈부착 가능하게 장착하는 동시에, 상완에 탈부착 가능하게 감김으로써 상완 지지부(16)를 상완에 고정하는 후크 앤드 루프 패스너(290)를 구비하고 있다.
이러한 완부 보조 장치(200)에 의하면, 상완 지지부(16)와 어깨 벨트(280)가, 상완 지지부(16)를 상완에 고정하는 후크 앤드 루프 패스너(290)로 연결되어 있으므로, 장착자(P)는 완부 보조 장치(200)를 장착하고 나서 용이하게 후크 앤드 루프 패스너(290)를 상완에 감을 수 있다.
또한, 완부 보조 장치(200)에 있어서, 상완 지지부(16)는, 각각 상완의 양측부에 대향하여 배치되는 동시에 인체 좌우 방향 외측에 있어서 제 1 부재(220)에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착된 한쌍의 측부재(16A)와, 한쌍의 측부재(16A)의 인체 후방측 단부에 걸쳐 형성되고, 상완의 배면측에 맞닿는 배면측 부재(16B)를 구비하고, 상완의 정면측이 개방되고, 완부 보조 장치(200)는, 소정 위치로부터의 상완 지지부(16)의 인체 상방향으로의 회동을 제한하는 회동 제한 부재(230)를 구비하고 있다.
이러한 완부 보조 장치(200)에 의하면, 소정 위치로부터의 상완 지지부(16)의 인체 상방향으로의 회동을 제한하는 회동 제한 부재(230)를 구비하고 있으므로, 상완 지지부(16)가 팔에서 벗겨져 팔과는 무관하게 회동하는 것을 방지할 수 있고, 상완 지지부(16)를 항상 상완과 접촉시킬 수 있다.
또한, 완부 보조 장치(200)는, 상체 지지부(250)의 상방측에 인체 좌우 방향을 따라 형성되는 동시에 장착자(P)의 어깨의 측방측으로부터 부재 지지부(210)에 연결된 암부(240)를 구비하고 있다.
이러한 완부 보조 장치(200)에 의하면, 상체 지지부(250)의 상방측에 인체 좌우 방향을 따라 형성되는 동시에 장착자(P)의 어깨의 측방측으로부터 부재 지지부(210)에 연결된 암부(240)를 구비하고 있으므로, 상완을 따라 배치되는 제 1 부재(220)를 디폴트로 인체 전방측을 향하게 할 수 있다.
본 발명은, 상기 실시 형태에 한정되는 것은 아니고, 여러 가지 변경 및 변형이 가능하다.
예를 들어, 도 20에 나타내는 바와 같이, 한쌍의 원형단 부재(2505)를 각각 지지하는 기부 금구(2601)간의 거리를 일정하게 유지하기 위한 거리 유지 부재(263A)를 설치할 수도 있다. 도 20은, 제 3 실시 형태에 따른 완부 보조 장치의 변형예를 나타내는 배면도이다.
구체적으로, 거리 유지 부재(263A)는, 띠부(260)의 상하 방향에서의 폭보다 짧은 폭을 갖고, 좌우의 기부 금구(2601)의 둘레를 둘러싸는 한편, 좌우의 기부 금구(2601)에 걸쳐지도록 하여 띠부(260)의 후면을 따라 설치되어 있다. 거리 유지 부재(263A)는, 금속제의 판부재에 의해 구성되어 있고, 본 실시 형태에서는, 예를 들어, 알루미늄 합금제의 판부재에 의해 구성되어 있다.
거리 유지 부재(263A)는, 도 20에 나타내는 바와 같이, 좌우 방향으로 긴 띠형의 판 형상을 갖고 있고, 좌우의 단부(2631A)가, 중앙의 부분(2632A)에 대하여, 각각 전방향으로 둔각을 이루는 각도로 절곡되어 있다. 거리 유지 부재(263A)의 좌우의 단부에 있어서는, 상단으로부터 상하 방향에서의 중앙에 이를 때까지 노치(2633A)가 형성되어 있다. 해당 노치의 하단부에, 후방으로 돌출하는 기부 금구(2601)가 배치된 위치 관계에서, 거리 유지 부재(263A)의 좌우의 단부는, 기부 금구(2601)를 둘러싸도록 배치된 4개의 볼트(2635A)에 의해, 띠부(260)에 고정되어 있다. 띠부(260)와 거리 유지 부재(263A) 사이에는, 소정의 틈이 형성되어 있다.
또한, 힘 부가 수단으로 가스 스프링(80)을 이용한다고 설명했지만, 이것에 한정되지 않고, 스프링 등의 다른 힘 부가 수단이 이용될 수도 있다.
10: 완부 보조 장치
14: 상체 지지부
16: 상완 지지부
16A: 측부재
16B: 배면측 부재
16C: 커버
18: 부재 지지부
26: 슬라이드부
36: 암부
60: 가변부
64: 연장부
72: 제 1 축부
76: 제 1 부재
80: 가스 스프링(힘 부가 수단)
84: 제 2 축부
86: 스토퍼
90: 널링 나사(조정부)
100: 완부 보조 장치
164: 연장부
184: 제 3 축부
200: 완부 보조 장치
210: 부재 지지부
220: 제 1 부재
221: 제 1 축부
222: 제 2 축부
230: 회동 제한 부재
240: 암부
250: 상체 지지부
260: 띠부
261: 버클
270: 배면 연결 부재
280: 어깨 벨트
285: 스트랩
286: 버클
290: 후크 앤드 루프 패스너(고정구)
P: 장착자
AP: 상완부
UB: 상체부
WP: 허리부
14: 상체 지지부
16: 상완 지지부
16A: 측부재
16B: 배면측 부재
16C: 커버
18: 부재 지지부
26: 슬라이드부
36: 암부
60: 가변부
64: 연장부
72: 제 1 축부
76: 제 1 부재
80: 가스 스프링(힘 부가 수단)
84: 제 2 축부
86: 스토퍼
90: 널링 나사(조정부)
100: 완부 보조 장치
164: 연장부
184: 제 3 축부
200: 완부 보조 장치
210: 부재 지지부
220: 제 1 부재
221: 제 1 축부
222: 제 2 축부
230: 회동 제한 부재
240: 암부
250: 상체 지지부
260: 띠부
261: 버클
270: 배면 연결 부재
280: 어깨 벨트
285: 스트랩
286: 버클
290: 후크 앤드 루프 패스너(고정구)
P: 장착자
AP: 상완부
UB: 상체부
WP: 허리부
Claims (20)
- 장착자의 상완의 측방측에 배치된 부재 지지부;
상기 부재 지지부의 인체 하방측에 설치되고, 장착자의 상체를 배면측으로부터 지지하는 상체 지지부;
상기 상완을 따라 배치되고, 상기 부재 지지부에 축방향을 인체 좌우 방향으로 하여 설치된 제 1 축부를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 된 제 1 부재;
상기 제 1 부재의 한쪽의 단부에 장착되고, 상기 상완을 지지하는 상완 지지부;
상기 상완을 따라 배치되고, 한쪽의 단부가, 상기 제 1 부재에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착되는 동시에, 다른쪽의 단부가, 상기 부재 지지부에 축방향을 인체 좌우 방향으로 하여 설치된 제 2 축부를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 접속되고, 장착자의 팔에 힘을 가하는 힘 부가 수단;
을 포함하여 구성된 완부 보조 장치. - 제 1항에 있어서,
상기 부재 지지부에 설치되고, 상기 제 1 축부와의 거리를 변경 가능한 가변부;
상기 부재 지지부에 설치되는 동시에, 상기 부재 지지부에서의 상기 가변부의 위치를 변경 가능한 조정부;를 포함하여 구성되고,
상기 힘 부가 수단은, 상기 다른쪽의 단부가, 상기 가변부를 통하여 상기 부재 지지부에 간접적으로 장착되고, 장착자의 팔이 인체 전방측으로 회전하는 방향으로 힘을 가하는 완부 보조 장치. - 제 2항에 있어서,
상기 조정부는, 상기 부재 지지부에서의 상기 가변부의 인체 상하 방향의 위치를 무단계로 변경 가능한 완부 보조 장치. - 제 2항 또는 제 3항에 있어서,
상기 힘 부가 수단은, 중립점을 넘으면 힘 부가 방향이 인체 후방측으로 반전하고, 상기 부재 지지부는, 장착자의 팔의 인체 후방측으로의 회전에 대하여 상기 제 1 부재를 정지시키기 위한 스토퍼를 구비한 완부 보조 장치. - 제 2항 내지 제 4항 중 어느 한 항에 있어서,
상기 힘 부가 수단의 상기 다른쪽의 단부는, 상기 가변부 대신에 상기 가변부로부터 장착자의 팔꿈치측을 향하여 연재된 연장부에 축방향을 인체 좌우 방향으로 하여 설치된 제 3 축부를 회전축으로 하여 인체 상하 방향으로 회동 가능하게 장착된 완부 보조 장치. - 제 2항 내지 제 5항 중 어느 한 항에 있어서,
상기 상완 지지부는, 각각 상기 상완의 양측부에 대향하여 배치되는 동시에 인체 좌우 방향 외측에 있어서 상기 제 1 부재에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착된 한쌍의 측부재; 상기 한쌍의 측부재의 인체 후방측 단부에 걸쳐 형성되고, 상기 상완의 배면측에 맞닿는 배면측 부재;를 구비하고, 상기 상완의 정면측이 개방된 완부 보조 장치. - 제 2항 내지 제 6항 중 어느 한 항에 있어서,
상기 상체 지지부의 상방측에 인체 좌우 방향을 따라 형성되는 동시에 장착자의 어깨의 측방측으로부터 상기 부재 지지부에 연결되고, 인체 좌우 방향의 길이를 조정 가능한 암부를 구비한 완부 보조 장치. - 제 2항 내지 제 7항 중 어느 한 항에 있어서,
상기 상체 지지부는, 장착자의 허리 둘레 방향을 따라 띠형상으로 형성되는 동시에, 장착자의 허리에 고정 가능한 띠부를 구비하는 완부 보조 장치. - 제 2항 내지 제 8항 중 어느 한 항에 있어서,
상기 상체 지지부는, 인체 상하 방향을 따라 슬라이드 가능한 가동부에 의해 상기 상체 지지부의 인체 상하 방향의 높이를 조정 가능한 슬라이드부를 구비하는 완부 보조 장치. - 제 1항에 있어서,
상기 힘 부가 수단은, 상기 다른쪽의 단부가, 상기 부재 지지부에 직접적으로 장착된 완부 보조 장치. - 제 10항에 있어서,
장착자의 팔의 회전 각도에 대하여, 장착자의 팔이 수평으로 펼쳐진 경우를 0도로 하고, 장착자의 팔이 상방측으로 들어 올려진 경우를 양으로 정의하는 경우에 있어서,
상기 힘 부가 수단에 의해 장착자의 팔에 힘을 가하는 토크는, -90도인 경우에 음의 값이고, 0도 초과 90도 미만의 소정 각도인 경우에 최대치가 되는 양의 값이고, 90도인 경우에 양의 값인 한편 -90도 내지 90도의 범위에서 변동하는 것에 따라 값이 매끄럽게 변동하는 완부 보조 장치. - 제 10항 또는 제 11항에 있어서,
장착자의 팔의 인체 후방측으로의 회전에 대하여 상기 제 1 부재를 정지시키기 위한 록 기구를 구비한 완부 보조 장치. - 제 10항 내지 제 12항 중 어느 한 항에 있어서,
장착자의 허리 둘레 방향을 따라 띠형상으로 형성되는 동시에, 장착자의 허리에 고정 가능한 띠부를 구비하고,
상기 상체 지지부는, 인체 상하 방향을 따라 좌우에 쌍으로 배치되는 동시에, 각각의 하단이, 회전에 대한 3개의 자유도를 갖도록 상기 띠부에 장착되어 있는 완부 보조 장치. - 제 13항에 있어서,
상기 한쌍의 상체 지지부는, 각각, 길이의 조절이 가능한 완부 보조 장치. - 제 13항 또는 제 14항에 있어서,
상기 한쌍의 상체 지지부 각각에서의 상방에 있어서, 그 한쌍의 상체 지지부를 서로 연결하고, 장착자의 상체를 배면측으로부터 신축 가능하게 지지하는 배면 연결 부재를 구비한 완부 보조 장치. - 제 15항에 있어서,
상체 상하 방향을 따라 좌우에 쌍으로 배치되고, 각각의 하단이 상기 띠부에서의 인체 전방측에 장착되는 한편, 각각의 상단이 상기 배면 연결 부재에 장착된 어깨 벨트를 구비한 완부 보조 장치. - 제 16항에 있어서,
상기 상완 지지부를 상기 어깨 벨트에 탈부착 가능하게 장착하는 동시에, 상기 상완에 탈부착 가능하게 감김으로써 상기 상완 지지부를 상기 상완에 고정하는 고정구를 구비한 완부 보조 장치. - 제 13항 내지 제 17항 중 어느 한 항에 있어서,
상기 띠부에 장착되어 있는 상기 상체 지지부의 하단간의 거리를 일정하게 유지하기 위한 거리 유지 부재를 구비하는 완부 보조 장치. - 제 10항 내지 제 18항 중 어느 한 항에 있어서,
상기 상완 지지부는, 각각 상기 상완의 양측부에 대향하여 배치되는 동시에 인체 좌우 방향 외측에 있어서 상기 제 1 부재에 인체 좌우 방향을 따른 축선 둘레에 인체 상하 방향으로 회동 가능하게 장착된 한쌍의 측부재; 상기 한쌍의 측부재의 인체 후방측 단부에 걸쳐 형성되고, 상기 상완의 배면측에 맞닿는 배면측 부재;를 구비하고, 상기 상완의 정면측이 개방되고,
상기 완부 보조 장치는, 소정 위치로부터의 상기 상완 지지부의 인체 상방향으로의 회동을 제한하는 회동 제한 부재를 구비한 완부 보조 장치. - 제 10항 내지 제 19항 중 어느 한 항에 있어서,
상기 상체 지지부의 상방측에 인체 좌우 방향을 따라 형성되는 동시에 장착자의 어깨의 측방측으로부터 상기 부재 지지부에 연결된 암부를 구비한 완부 보조 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019072668 | 2019-04-05 | ||
| JPJP-P-2019-072668 | 2019-04-05 | ||
| PCT/JP2020/014701 WO2020204009A1 (ja) | 2019-04-05 | 2020-03-30 | 腕部補助装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20210144841A true KR20210144841A (ko) | 2021-11-30 |
Family
ID=72668156
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020217034982A KR20210144841A (ko) | 2019-04-05 | 2020-03-30 | 완부 보조 장치 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3949911A4 (ko) |
| JP (1) | JPWO2020204009A1 (ko) |
| KR (1) | KR20210144841A (ko) |
| WO (1) | WO2020204009A1 (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022104462A (ja) * | 2020-12-28 | 2022-07-08 | 株式会社イノフィス | 腕部補助装置 |
| WO2023003868A1 (en) * | 2021-07-19 | 2023-01-26 | Enhance Technologies, LLC | Flexible exoskeleton frames and arm support systems and methods for using them |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016508072A (ja) | 2012-12-11 | 2016-03-17 | レヴィテート テクノロジーズ インコーポレイテッド | 適応的腕支持システムおよび使用方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9889554B2 (en) * | 2015-05-18 | 2018-02-13 | The Regents Of The University Of California | Apparatus for human arm supporting exoskeleton |
| WO2017086946A1 (en) * | 2015-11-18 | 2017-05-26 | The Regents Of The University Of California | Trunk supporting exoskeleton and method of use |
| BR112018068647A2 (pt) * | 2016-03-14 | 2019-02-05 | Exoiq Gmbh | exoesqueleto para um ser humano |
-
2020
- 2020-03-30 EP EP20782590.2A patent/EP3949911A4/en not_active Withdrawn
- 2020-03-30 JP JP2021512142A patent/JPWO2020204009A1/ja active Pending
- 2020-03-30 WO PCT/JP2020/014701 patent/WO2020204009A1/ja unknown
- 2020-03-30 KR KR1020217034982A patent/KR20210144841A/ko not_active Application Discontinuation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016508072A (ja) | 2012-12-11 | 2016-03-17 | レヴィテート テクノロジーズ インコーポレイテッド | 適応的腕支持システムおよび使用方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2020204009A1 (ko) | 2020-10-08 |
| WO2020204009A1 (ja) | 2020-10-08 |
| EP3949911A1 (en) | 2022-02-09 |
| EP3949911A4 (en) | 2022-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20210144841A (ko) | 완부 보조 장치 | |
| US10369690B2 (en) | Apparatus for human arm supporting exoskeleton | |
| US10639785B2 (en) | Variable force generators for arm supporting exoskeletons | |
| JP5969478B2 (ja) | ストラップ拘束具 | |
| US10391627B2 (en) | Arm supporting exoskeleton with a variable force generator | |
| EP3998054A1 (en) | Waist assistance device | |
| US11071371B2 (en) | One-belt harness | |
| JP7182418B2 (ja) | 動作支援装置 | |
| JP6350990B2 (ja) | 骨盤ベルト | |
| US20120305616A1 (en) | Sling retaining assembly and method of use | |
| JP3184245U (ja) | 作業用腕支持具 | |
| JP2020014520A (ja) | 安全機能付きアシストスーツ | |
| US9500316B2 (en) | System and apparatus for the support of optics | |
| EP3437698A1 (en) | Harness design for respiratory system | |
| JP2019216538A (ja) | 作業支援具 | |
| KR20150002897U (ko) | 다목적 암밴드 | |
| US11109995B1 (en) | Shoulder support system | |
| WO2022145259A1 (ja) | 腕部補助装置 | |
| KR200484108Y1 (ko) | 아기띠 | |
| JP6261905B2 (ja) | 締め付け機能を備えたサポータ | |
| US20240255100A1 (en) | Hands-free portable device positioning apparatus | |
| CN218413082U (zh) | 一种头戴设备 | |
| KR200497273Y1 (ko) | 골프 스윙 보조 기구 | |
| JP5365612B2 (ja) | 動作補助具 | |
| JP3341233B2 (ja) | 作業補助装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |