JP6623682B2 - 物理量検出振動片、物理量検出装置、電子機器および移動体 - Google Patents
物理量検出振動片、物理量検出装置、電子機器および移動体 Download PDFInfo
- Publication number
- JP6623682B2 JP6623682B2 JP2015211602A JP2015211602A JP6623682B2 JP 6623682 B2 JP6623682 B2 JP 6623682B2 JP 2015211602 A JP2015211602 A JP 2015211602A JP 2015211602 A JP2015211602 A JP 2015211602A JP 6623682 B2 JP6623682 B2 JP 6623682B2
- Authority
- JP
- Japan
- Prior art keywords
- detection
- electrode
- arm
- electrode portion
- reference potential
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 505
- 235000014676 Phragmites communis Nutrition 0.000 claims description 31
- 238000012545 processing Methods 0.000 description 30
- 230000003321 amplification Effects 0.000 description 25
- 238000003199 nucleic acid amplification method Methods 0.000 description 25
- 230000005684 electric field Effects 0.000 description 14
- 230000035945 sensitivity Effects 0.000 description 12
- 238000005452 bending Methods 0.000 description 10
- 230000001360 synchronised effect Effects 0.000 description 10
- 230000005484 gravity Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 230000000694 effects Effects 0.000 description 8
- 230000006870 function Effects 0.000 description 8
- 238000009499 grossing Methods 0.000 description 8
- 239000010453 quartz Substances 0.000 description 7
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 6
- 239000003990 capacitor Substances 0.000 description 4
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 239000013078 crystal Substances 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 241000251131 Sphyrna Species 0.000 description 2
- 230000002238 attenuated effect Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000000059 patterning Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- RIUWBIIVUYSTCN-UHFFFAOYSA-N trilithium borate Chemical compound [Li+].[Li+].[Li+].[O-]B([O-])[O-] RIUWBIIVUYSTCN-UHFFFAOYSA-N 0.000 description 1
Images






















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
- G01C19/5656—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
- G01C19/5614—Signal processing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
- G01C19/5649—Signal processing
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/30—Piezoelectric or electrostrictive devices with mechanical input and electrical output, e.g. functioning as generators or sensors
- H10N30/302—Sensors
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Signal Processing (AREA)
- Gyroscopes (AREA)
Description
前記検出腕に配置されている第1検出信号電極、第2検出信号電極および基準電位電極と、を有し、
前記第1検出信号電極は、第1電極部と、第2電極部と、を有し、
前記第2検出信号電極は、第3電極部と、第4電極部と、を有し、
前記基準電位電極は、
前記第1電極部に対して基準電位となる第1基準電位電極部と、
前記第2電極部に対して基準電位となる第2基準電位電極部と、
前記第3電極部に対して基準電位となる第3基準電位電極部と、
前記第4電極部に対して基準電位となる第4基準電位電極部と、を有し、
前記第1電極部と前記第1基準電位電極部の間に発生する信号と、前記第2電極部と前記第2基準電位電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第3電極部と前記第3基準電位電極部の間に発生する信号と、前記第4電極部と前記第4基準電位電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であることを特徴とする。
これにより、検出信号に混入したノイズを効果的に低減することができ、優れた物理量検出感度を発揮することのできる物理量検出振動片となる。
前記第1方向の一方側に向けて突出する第1突出部と、
前記第1方向の他方側に向けて突出する第2突出部と、
前記第1突出部に対して前記第2方向の一方側に位置し、前記第1方向の前記一方側に向けて突出する第3突出部と、
前記第2突出部に対して前記第2方向の前記一方側に位置し、前記第1方向の前記他方側に向けて突出する第4突出部と、を有し、
前記第1電極部および前記第1基準電位電極部は、前記第1突出部を間に挟んで配置され、
前記第2電極部および前記第2基準電位電極部は、前記第2突出部を間に挟んで配置され、
前記第3電極部および前記第3基準電位電極部は、前記第3突出部を間に挟んで配置され、
前記第4電極部および前記第4基準電位電極部は、前記第4突出部を間に挟んで配置されていることが好ましい。
これにより、各電極の配置が容易となると共に、効率的に検出信号を取り出すことができる。
前記検出腕に配置されている第1検出信号電極および第2検出信号電極と、を有し、
前記第1検出信号電極は、第1電極部と、第2電極部と、を有し、
前記第2検出信号電極は、第3電極部と、第4電極部と、を有し、
前記第1電極部と前記第3電極部の間に発生する信号と、前記第2電極部と前記第3電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第1電極部と前記第4電極部の間に発生する信号と、前記第2電極部と前記第4電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であることを特徴とする。
これにより、検出信号に混入したノイズを効果的に低減することができ、優れた物理量検出感度を発揮することのできる物理量検出振動片となる。
前記第1方向の一方側に配置されている検出腕第1主面と、
前記第1方向の他方側に配置されている検出腕第2主面と、
前記第2方向の一方側に配置されている検出腕第1側面と、
前記第2方向の他方側に配置されている検出腕第2側面と、
前記検出腕第1主面に開放する検出腕第1溝部と、
前記検出腕第2主面に開放する検出腕第2溝部と、を有し、
前記第1電極部は、前記検出腕第1溝部に配置され、
前記第2電極部は、前記検出腕第2溝部に配置され、
前記第3電極部は、前記検出腕第1側面に配置され、
前記第4電極部は、前記検出腕第2側面に配置されていることが好ましい。
これにより、各電極の配置が容易となると共に、効率的に検出信号を取り出すことができる。
前記検出腕および前記駆動腕が接続されている基部と、を有することが好ましい。
これにより、物理量検出振動片をバランスよく駆動させることができる。
これにより、信号強度を高めることができる。また、検出腕の振動方向の異なりを利用して異なる物理量を独立して検出することも可能となる。
基部と、
前記基部から互いに前記第3方向の反対側に延びている一対の前記検出腕と、
前記基部から互いに前記第2方向の反対側に延びている一対の連結腕と、
一方の前記連結腕から互いに前記第3方向の反対側へ延びている一対の駆動腕と、
他方の前記連結腕から互いに前記第3方向の反対側へ延びている一対の駆動腕と、を有していることが好ましい。
これにより、物理量検出振動片をバランスよく駆動させることができる。また、検出腕が2本あるため、検出感度が向上する。
他方の前記検出腕の前記第1方向の他方側の面に設けられている第2錘部と、を有していることが好ましい。
これにより、一対の検出腕の第1方向への振動が対称的となる。
前記第1方向の一方側に配置されている駆動腕第1主面と、
前記第1方向の他方側に配置されている駆動腕第2主面と、
前記第2方向の一方側に配置されている駆動腕第1側面と、
前記第2方向の他方側に配置されている駆動腕第2側面と、
前記駆動腕第1主面に設けられている駆動腕第1溝部と、
前記駆動腕第2主面に設けられている駆動腕第2溝部と、
前記駆動腕第1溝部の前記第2方向の一方側に位置し、前記駆動腕第1主面と前記駆動腕第1側面とを接続している第1段差部と、
前記駆動腕第2溝部の前記第2方向の他方側に位置し、前記駆動腕第2主面と前記駆動腕第2側面とを接続している第2段差部と、を有し、
前記第1段差部の前記第3方向の先端は、前記駆動腕第1溝部の前記第3方向の先端よりも前記駆動腕の先端側に位置し、
前記第2段差部の前記第3方向の先端は、前記駆動腕第2溝部の前記第3方向の先端よりも前記駆動腕の先端側に位置していることが好ましい。
これにより、駆動腕を第1方向および第2方向を含む斜め方向に効率的に振動させることができる。
前記物理量検出振動片と電気的に接続されている回路と、を有することを特徴とする。
これにより、信頼性の高い物理量検出装置が得られる。
これにより、信頼性の高い電子機器が得られる。
これにより、信頼性の高い移動体が得られる。
まず、本発明の第1実施形態に係る物理量検出振動片について説明する。
図9は、本発明の第2実施形態に係る物理量検出振動片の斜視図である。図10は、図9中のC−C線断面図である。
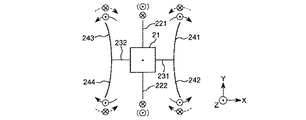
図11および図12は、それぞれ、本発明の第3実施形態に係る物理量検出振動片の断面図である。図13および図14は、それぞれ、屈曲振動により検出腕に発生する電界の向きを示す断面図である。
図15は、本発明の第4実施形態に係る物理量検出振動片の上面図および下面図である。図16は、腕の重心を示す断面図である。図17および図18は、それぞれ、図15に示す物理量検出振動片の変形例を示す上面図および下面図である。なお、図15、図17および図18では、説明の便宜上、電極、配線、端子、溝部、段差部の図示を省略している。
図19は、本発明の第5実施形態に係る物理量検出振動片の上面図および下面図である。
次に、本発明の物理量検出振動片を備える物理量検出装置について説明する。
図20は、本発明の物理量検出装置を示すブロック図である。
なお、検出信号Saと検出信号Sbとは、電気的特性が逆である。
なお、検出信号Scと検出信号Sdとは、電気的特性が逆である。
次に、本発明の物理量検出振動片を備える電子機器について説明する。
このような電子機器は、振動片1を備えているので、優れた信頼性を有している。
次に、本発明の物理量検出振動片を備える移動体について説明する。
図24に示すように、自動車1500には振動片1が内蔵されており、例えば、振動片1によって車体1501の姿勢を検出することができる。振動片1の検出信号は、車体姿勢制御装置1502に供給され、車体姿勢制御装置1502は、その信号に基づいて車体1501の姿勢を検出し、検出結果に応じてサスペンションの硬軟を制御したり、個々の車輪1503のブレーキを制御したりすることができる。その他、このような姿勢制御は、二足歩行ロボットやラジコンヘリコプター(ドローンを含む)で利用することができる。以上のように、各種移動体の姿勢制御の実現にあたって、振動片1が組み込まれる。
Claims (14)
- 圧電体を含み、第1方向に沿って駆動振動し、物理量が加わることで前記第1方向に直交する第2方向に沿って検出振動する検出腕と、
前記検出腕に配置されている第1検出信号電極、第2検出信号電極および基準電位電極と、を有し、
前記第1検出信号電極は、第1電極部と、第2電極部と、を有し、
前記第2検出信号電極は、第3電極部と、第4電極部と、を有し、
前記基準電位電極は、
前記第1電極部に対して基準電位となる第1基準電位電極部と、
前記第2電極部に対して基準電位となる第2基準電位電極部と、
前記第3電極部に対して基準電位となる第3基準電位電極部と、
前記第4電極部に対して基準電位となる第4基準電位電極部と、を有し、
前記検出腕は、
前記第1方向の一方側に配置されている検出腕第1主面と、
前記第1方向の他方側に配置されている検出腕第2主面と、
前記検出腕第1主面に開放する検出腕第1溝部と、
前記検出腕第2主面に開放する検出腕第2溝部と、を有し、
前記第1電極部は、前記検出腕第1溝部に配置され、
前記第2電極部は、前記検出腕第2溝部に配置され、
前記第3電極部および前記第4電極部は、前記第2方向の一方側に配置されている検出腕側面に配置され、
前記第1電極部と前記第1基準電位電極部の間に発生する信号と、前記第2電極部と前記第2基準電位電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第3電極部と前記第3基準電位電極部の間に発生する信号と、前記第4電極部と前記第4基準電位電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であることを特徴とする物理量検出振動片。 - 前記検出腕は、
前記第1方向の一方側に向けて突出する第1突出部と、
前記第1方向の他方側に向けて突出する第2突出部と、
前記第1突出部に対して前記第2方向の一方側に位置し、前記第1方向の前記一方側に向けて突出する第3突出部と、
前記第2突出部に対して前記第2方向の前記一方側に位置し、前記第1方向の前記他方側に向けて突出する第4突出部と、を有し、
前記第1電極部および前記第1基準電位電極部は、前記第1突出部を間に挟んで配置され、
前記第2電極部および前記第2基準電位電極部は、前記第2突出部を間に挟んで配置され、
前記第3電極部および前記第3基準電位電極部は、前記第3突出部を間に挟んで配置され、
前記第4電極部および前記第4基準電位電極部は、前記第4突出部を間に挟んで配置されている請求項1に記載の物理量検出振動片。 - 圧電体を含み、第1方向に沿って駆動振動し、物理量が加わることで前記第1方向に直交する第2方向に沿って検出振動する検出腕と、
前記検出腕に配置されている第1検出信号電極および第2検出信号電極と、を有し、
前記第1検出信号電極は、第1電極部と、第2電極部と、を有し、
前記第2検出信号電極は、第3電極部と、第4電極部と、を有し、
前記第1電極部と前記第3電極部の間に発生する信号と、前記第2電極部と前記第3電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第1電極部と前記第4電極部の間に発生する信号と、前記第2電極部と前記第4電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であることを特徴とする物理量検出振動片。 - 前記検出腕は、
前記第1方向の一方側に配置されている検出腕第1主面と、
前記第1方向の他方側に配置されている検出腕第2主面と、
前記第2方向の一方側に配置されている検出腕第1側面と、
前記第2方向の他方側に配置されている検出腕第2側面と、
前記検出腕第1主面に開放する検出腕第1溝部と、
前記検出腕第2主面に開放する検出腕第2溝部と、を有し、
前記第1電極部は、前記検出腕第1溝部に配置され、
前記第2電極部は、前記検出腕第2溝部に配置され、
前記第3電極部は、前記検出腕第1側面に配置され、
前記第4電極部は、前記検出腕第2側面に配置されている請求項3に記載の物理量検出振動片。 - 前記検出腕を挟んで配置されている一対の駆動腕と、
前記検出腕および前記駆動腕が接続されている基部と、を有する請求項1ないし4のいずれか1項に記載の物理量検出振動片。 - 前記検出腕は、前記基部を挟んで少なくとも2本配置されている請求項5に記載の物理量検出振動片。
- 前記第1方向および前記第2方向に直交する方向を第3方向としたとき、
基部と、
前記基部から互いに前記第3方向の反対側に延びている一対の前記検出腕と、
前記基部から互いに前記第2方向の反対側に延びている一対の連結腕と、
一方の前記連結腕から互いに前記第3方向の反対側へ延びている一対の駆動腕と、
他方の前記連結腕から互いに前記第3方向の反対側へ延びている一対の駆動腕と、を有している請求項1ないし4のいずれか1項に記載の物理量検出振動片。 - 圧電体を含み、第1方向に沿って駆動振動し、物理量が加わることで前記第1方向に直交する第2方向に沿って検出振動する検出腕と、
前記検出腕に配置されている第1検出信号電極、第2検出信号電極および基準電位電極と、を有し、
前記第1検出信号電極は、第1電極部と、第2電極部と、を有し、
前記第2検出信号電極は、第3電極部と、第4電極部と、を有し、
前記基準電位電極は、
前記第1電極部に対して基準電位となる第1基準電位電極部と、
前記第2電極部に対して基準電位となる第2基準電位電極部と、
前記第3電極部に対して基準電位となる第3基準電位電極部と、
前記第4電極部に対して基準電位となる第4基準電位電極部と、を有し、
前記第1電極部と前記第1基準電位電極部の間に発生する信号と、前記第2電極部と前記第2基準電位電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第3電極部と前記第3基準電位電極部の間に発生する信号と、前記第4電極部と前記第4基準電位電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第1方向および前記第2方向に直交する方向を第3方向としたとき、
基部と、
前記基部から互いに前記第3方向の反対側に延びている一対の前記検出腕と、
前記基部から互いに前記第2方向の反対側に延びている一対の連結腕と、
一方の前記連結腕から互いに前記第3方向の反対側へ延びている一対の駆動腕と、
他方の前記連結腕から互いに前記第3方向の反対側へ延びている一対の駆動腕と、を有し、
一方の前記検出腕の前記第1方向の一方側の面に設けられている第1錘部と、
他方の前記検出腕の前記第1方向の他方側の面に設けられている第2錘部と、を有していることを特徴とする物理量検出振動片。 - 圧電体を含み、第1方向に沿って駆動振動し、物理量が加わることで前記第1方向に直交する第2方向に沿って検出振動する検出腕と、
前記検出腕に配置されている第1検出信号電極および第2検出信号電極と、を有し、
前記第1検出信号電極は、第1電極部と、第2電極部と、を有し、
前記第2検出信号電極は、第3電極部と、第4電極部と、を有し、
前記第1電極部と前記第3電極部の間に発生する信号と、前記第2電極部と前記第3電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第1電極部と前記第4電極部の間に発生する信号と、前記第2電極部と前記第4電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第1方向および前記第2方向に直交する方向を第3方向としたとき、
基部と、
前記基部から互いに前記第3方向の反対側に延びている一対の前記検出腕と、
前記基部から互いに前記第2方向の反対側に延びている一対の連結腕と、
一方の前記連結腕から互いに前記第3方向の反対側へ延びている一対の駆動腕と、
他方の前記連結腕から互いに前記第3方向の反対側へ延びている一対の駆動腕と、を有し、
一方の前記検出腕の前記第1方向の一方側の面に設けられている第1錘部と、
他方の前記検出腕の前記第1方向の他方側の面に設けられている第2錘部と、を有していることを特徴とする物理量検出振動片。 - 圧電体を含み、第1方向に沿って駆動振動し、物理量が加わることで前記第1方向に直交する第2方向に沿って検出振動する検出腕と、
前記検出腕に配置されている第1検出信号電極、第2検出信号電極および基準電位電極と、を有し、
前記第1検出信号電極は、第1電極部と、第2電極部と、を有し、
前記第2検出信号電極は、第3電極部と、第4電極部と、を有し、
前記基準電位電極は、
前記第1電極部に対して基準電位となる第1基準電位電極部と、
前記第2電極部に対して基準電位となる第2基準電位電極部と、
前記第3電極部に対して基準電位となる第3基準電位電極部と、
前記第4電極部に対して基準電位となる第4基準電位電極部と、を有し、
前記第1電極部と前記第1基準電位電極部の間に発生する信号と、前記第2電極部と前記第2基準電位電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第3電極部と前記第3基準電位電極部の間に発生する信号と、前記第4電極部と前記第4基準電位電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記検出腕を挟んで配置されている一対の駆動腕と、
前記検出腕および前記駆動腕が接続されている基部と、を有し、
前記駆動腕は、
前記第1方向の一方側に配置されている駆動腕第1主面と、
前記第1方向の他方側に配置されている駆動腕第2主面と、
前記第2方向の一方側に配置されている駆動腕第1側面と、
前記第2方向の他方側に配置されている駆動腕第2側面と、
前記駆動腕第1主面に設けられている駆動腕第1溝部と、
前記駆動腕第2主面に設けられている駆動腕第2溝部と、
前記駆動腕第1溝部の前記第2方向の一方側に位置し、前記駆動腕第1主面と前記駆動腕第1側面とを接続している第1段差部と、
前記駆動腕第2溝部の前記第2方向の他方側に位置し、前記駆動腕第2主面と前記駆動腕第2側面とを接続している第2段差部と、を有し、
前記第1方向および前記第2方向に直交する方向を第3方向としたとき、
前記第1段差部の前記第3方向の先端は、前記駆動腕第1溝部の前記第3方向の先端よりも前記駆動腕の先端側に位置し、
前記第2段差部の前記第3方向の先端は、前記駆動腕第2溝部の前記第3方向の先端よりも前記駆動腕の先端側に位置している請求項5ないし8のいずれか1項に記載の物理量検出振動片。 - 圧電体を含み、第1方向に沿って駆動振動し、物理量が加わることで前記第1方向に直交する第2方向に沿って検出振動する検出腕と、
前記検出腕に配置されている第1検出信号電極および第2検出信号電極と、を有し、
前記第1検出信号電極は、第1電極部と、第2電極部と、を有し、
前記第2検出信号電極は、第3電極部と、第4電極部と、を有し、
前記第1電極部と前記第3電極部の間に発生する信号と、前記第2電極部と前記第3電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記第1電極部と前記第4電極部の間に発生する信号と、前記第2電極部と前記第4電極部の間に発生する信号とは、前記駆動振動のときに逆相であり、前記検出振動のときに同相であり、
前記検出腕を挟んで配置されている一対の駆動腕と、
前記検出腕および前記駆動腕が接続されている基部と、を有し、
前記駆動腕は、
前記第1方向の一方側に配置されている駆動腕第1主面と、
前記第1方向の他方側に配置されている駆動腕第2主面と、
前記第2方向の一方側に配置されている駆動腕第1側面と、
前記第2方向の他方側に配置されている駆動腕第2側面と、
前記駆動腕第1主面に設けられている駆動腕第1溝部と、
前記駆動腕第2主面に設けられている駆動腕第2溝部と、
前記駆動腕第1溝部の前記第2方向の一方側に位置し、前記駆動腕第1主面と前記駆動腕第1側面とを接続している第1段差部と、
前記駆動腕第2溝部の前記第2方向の他方側に位置し、前記駆動腕第2主面と前記駆動腕第2側面とを接続している第2段差部と、を有し、
前記第1方向および前記第2方向に直交する方向を第3方向としたとき、
前記第1段差部の前記第3方向の先端は、前記駆動腕第1溝部の前記第3方向の先端よりも前記駆動腕の先端側に位置し、
前記第2段差部の前記第3方向の先端は、前記駆動腕第2溝部の前記第3方向の先端よりも前記駆動腕の先端側に位置している請求項5ないし8のいずれか1項に記載の物理量検出振動片。 - 請求項1ないし11のいずれか1項に記載の物理量検出振動片と、
前記物理量検出振動片と電気的に接続されている回路と、を有することを特徴とする物理量検出装置。 - 請求項1ないし11のいずれか1項に記載の物理量検出振動片を有することを特徴とする電子機器。
- 請求項1ないし11のいずれか1項に記載の物理量検出振動片を有することを特徴とする移動体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015211602A JP6623682B2 (ja) | 2015-10-28 | 2015-10-28 | 物理量検出振動片、物理量検出装置、電子機器および移動体 |
| CN201610947746.2A CN106969760B (zh) | 2015-10-28 | 2016-10-26 | 物理量检测振动片、物理量检测装置、电子设备及移动体 |
| US15/336,404 US10072928B2 (en) | 2015-10-28 | 2016-10-27 | Physical quantity detection vibrator element, physical quantity detection apparatus, electronic apparatus, and moving object |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015211602A JP6623682B2 (ja) | 2015-10-28 | 2015-10-28 | 物理量検出振動片、物理量検出装置、電子機器および移動体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017083286A JP2017083286A (ja) | 2017-05-18 |
| JP2017083286A5 JP2017083286A5 (ja) | 2018-11-08 |
| JP6623682B2 true JP6623682B2 (ja) | 2019-12-25 |
Family
ID=58634432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015211602A Active JP6623682B2 (ja) | 2015-10-28 | 2015-10-28 | 物理量検出振動片、物理量検出装置、電子機器および移動体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10072928B2 (ja) |
| JP (1) | JP6623682B2 (ja) |
| CN (1) | CN106969760B (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7139610B2 (ja) * | 2018-01-23 | 2022-09-21 | セイコーエプソン株式会社 | 振動素子、振動素子の製造方法、物理量センサー、慣性計測装置、電子機器および移動体 |
| JP7332007B2 (ja) * | 2018-01-23 | 2023-08-23 | セイコーエプソン株式会社 | 振動素子、物理量センサー、慣性計測装置、電子機器および移動体 |
| JP2019178905A (ja) * | 2018-03-30 | 2019-10-17 | セイコーエプソン株式会社 | 物理量センサー、物理量センサーの製造方法、電子機器および移動体 |
| JP7152498B2 (ja) * | 2018-09-28 | 2022-10-12 | 京セラ株式会社 | センサ素子及び角速度センサ |
| JP7537152B2 (ja) * | 2020-07-17 | 2024-08-21 | セイコーエプソン株式会社 | オーバーシュート量検出方法およびロボットシステム |
| CN114978079A (zh) * | 2021-02-25 | 2022-08-30 | 精工爱普生株式会社 | 振动元件的制造方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002340559A (ja) * | 2001-05-11 | 2002-11-27 | Piedekku Gijutsu Kenkyusho:Kk | 水晶角速度センサ |
| DE102005041059B4 (de) * | 2004-09-02 | 2014-06-26 | Denso Corporation | Winkelratensensor und Anbringungsstruktur eines Winkelratensensors |
| JP4694953B2 (ja) | 2005-11-30 | 2011-06-08 | セイコーインスツル株式会社 | 圧電振動片の製造方法、圧電振動片、圧電振動子、発振器、電子機器及び電波時計 |
| CN101173957B (zh) * | 2006-10-30 | 2011-12-21 | 索尼株式会社 | 角速度传感器及电子机器 |
| JP5487672B2 (ja) * | 2009-03-27 | 2014-05-07 | パナソニック株式会社 | 物理量センサ |
| JP2011209002A (ja) * | 2010-03-29 | 2011-10-20 | Seiko Epson Corp | 振動片、角速度センサー、および電子機器 |
| JP2012063177A (ja) | 2010-09-14 | 2012-03-29 | Seiko Epson Corp | 振動片、振動子および電子機器 |
| US20120244969A1 (en) * | 2011-03-25 | 2012-09-27 | May Patents Ltd. | System and Method for a Motion Sensing Device |
| JP5724672B2 (ja) | 2011-06-24 | 2015-05-27 | セイコーエプソン株式会社 | 屈曲振動片、その製造方法、及び電子機器 |
| JP2013024721A (ja) * | 2011-07-21 | 2013-02-04 | Seiko Epson Corp | 振動ジャイロ素子、ジャイロセンサー及び電子機器 |
| JP5838689B2 (ja) | 2011-09-26 | 2016-01-06 | セイコーエプソン株式会社 | センサー素子、センサー素子の製造方法、センサーデバイスおよび電子機器 |
| JP2013178179A (ja) * | 2012-02-28 | 2013-09-09 | Seiko Epson Corp | センサー素子、センサーデバイスおよび電子機器 |
| JP5966460B2 (ja) * | 2012-03-13 | 2016-08-10 | セイコーエプソン株式会社 | ジャイロセンサーおよび電子機器 |
| US9222776B2 (en) * | 2012-03-13 | 2015-12-29 | Seiko Epson Corporation | Gyro sensor and electronic apparatus |
| JP6020793B2 (ja) * | 2012-04-02 | 2016-11-02 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
| JP6160027B2 (ja) | 2012-04-27 | 2017-07-12 | セイコーエプソン株式会社 | 振動片およびジャイロセンサー並びに電子機器および移動体 |
| JP5974629B2 (ja) * | 2012-05-23 | 2016-08-23 | セイコーエプソン株式会社 | 振動片、振動片の製造方法、角速度センサー、電子機器、移動体 |
| JP2016042074A (ja) * | 2014-08-13 | 2016-03-31 | セイコーエプソン株式会社 | 物理量センサー、電子機器および移動体 |
| JP6631108B2 (ja) * | 2015-09-15 | 2020-01-15 | セイコーエプソン株式会社 | 物理量センサー、センサーデバイス、電子機器および移動体 |
-
2015
- 2015-10-28 JP JP2015211602A patent/JP6623682B2/ja active Active
-
2016
- 2016-10-26 CN CN201610947746.2A patent/CN106969760B/zh active Active
- 2016-10-27 US US15/336,404 patent/US10072928B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN106969760A (zh) | 2017-07-21 |
| CN106969760B (zh) | 2022-02-18 |
| US20170122738A1 (en) | 2017-05-04 |
| US10072928B2 (en) | 2018-09-11 |
| JP2017083286A (ja) | 2017-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6623682B2 (ja) | 物理量検出振動片、物理量検出装置、電子機器および移動体 | |
| US10794778B2 (en) | Physical quantity detecting device, electronic apparatus, and moving object | |
| CN110333370B (zh) | 传感器元件、物理量传感器、电子设备以及移动体 | |
| US20150276404A1 (en) | Physical quantity detection circuit, physical quantity detecting device, electronic apparatus, and moving object | |
| JP6582501B2 (ja) | 振動素子、振動子、電子機器および移動体 | |
| CN104702240A (zh) | 振动元件、振子、振动装置、电子设备以及移动体 | |
| US9389078B2 (en) | Gyro sensor and electronic apparatus | |
| CN106017448A (zh) | 角速度检测元件、角速度检测装置、电子设备以及移动体 | |
| CN106482719B (zh) | 物理量检测装置及其制造方法、电子设备以及移动体 | |
| JP7491439B2 (ja) | 物理量検出回路、物理量センサー、電子機器、及び移動体物理量センサー | |
| JP6264535B2 (ja) | 振動素子製造用基板、振動素子の製造方法、物理量検出装置、電子機器、および移動体 | |
| JP2016176893A (ja) | 角速度検出素子、角速度検出デバイス、電子機器および移動体 | |
| JP2017090398A (ja) | 振動片、振動デバイス、電子機器および移動体 | |
| JP2013190304A (ja) | ジャイロセンサーおよび電子機器 | |
| JP5966461B2 (ja) | ジャイロセンサーおよび電子機器 | |
| JP6641874B2 (ja) | 物理量検出装置、電子機器および移動体 | |
| JP2016186479A (ja) | 物理量検出振動素子、物理量検出振動子、電子機器および移動体 | |
| JP2017211255A (ja) | 電子デバイス、電子デバイスの製造方法、物理量センサー、電子機器および移動体 | |
| JP2015087251A (ja) | 振動素子、物理量検出装置、電子機器、および移動体 | |
| JP2017078678A (ja) | 物理量検出振動片、物理量検出装置、電子機器および移動体 | |
| JP2016044977A (ja) | センサー素子、センサーデバイス、電子機器および移動体 | |
| JP2016085185A (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP2016038306A (ja) | センサー素子、センサーデバイス、電子機器および移動体 | |
| JP2015169648A (ja) | 機能素子、電子デバイス、物理量検出装置、電子機器、および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180906 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180926 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180926 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190820 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191015 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191029 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191111 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6623682 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |