JP6582392B2 - 車載周辺物体報知システム、物体報知システム、報知制御装置 - Google Patents
車載周辺物体報知システム、物体報知システム、報知制御装置 Download PDFInfo
- Publication number
- JP6582392B2 JP6582392B2 JP2014225551A JP2014225551A JP6582392B2 JP 6582392 B2 JP6582392 B2 JP 6582392B2 JP 2014225551 A JP2014225551 A JP 2014225551A JP 2014225551 A JP2014225551 A JP 2014225551A JP 6582392 B2 JP6582392 B2 JP 6582392B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- notification
- range
- line
- lane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000002093 peripheral effect Effects 0.000 title claims description 79
- 238000001514 detection method Methods 0.000 claims description 129
- 238000004891 communication Methods 0.000 claims description 17
- 230000005540 biological transmission Effects 0.000 claims description 3
- 238000000034 method Methods 0.000 description 42
- 230000008569 process Effects 0.000 description 39
- 230000004048 modification Effects 0.000 description 10
- 238000012986 modification Methods 0.000 description 10
- 238000012545 processing Methods 0.000 description 9
- 230000008859 change Effects 0.000 description 4
- 230000007717 exclusion Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 2
- 230000035508 accumulation Effects 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
- G08G1/162—Decentralised systems, e.g. inter-vehicle communication event-triggered
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/164—Centralised systems, e.g. external to vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
Description
車載周辺物体報知システムに係る第2発明は、車両の周辺に存在している物体を検出する周辺物体検出装置(30)と、周辺物体検出装置が検出した物体の存在をドライバに報知する報知装置(60)と、車両のドライバの視線を逐次検出する視線検出部(S214−S218)と、視線検出部が検出した視線に基づいて定まる認識方向範囲を、周辺物体検出装置の物体検出範囲に基づいて定まる基準報知範囲から除外して報知範囲を設定し、周辺物体検出装置が検出した物体が報知範囲内に存在していることに基づいて、物体が存在することを報知装置に報知させる報知制御部(S106−S110、S202−S212、S220、S222、S312−S318、S400)とを備え、報知制御部は、視線検出部が逐次検出した視線を最新のものから規定数用いて認識方向範囲を決定するようになっており、かつ、規定数を、車両の車速に応じて2種類以上に異ならせ、車速が相対的に速い場合、車速が相対的に遅い場合よりも、規定数を少なくし、車線の境界を表す車線境界線の位置を検出する境界線検出部(S102、S104)をさらに備え、報知制御部は、境界線検出部が車両が走行する車線の車線境界線を検出した場合、基準報知範囲を、周辺物体検出装置の物体検出範囲のうち、車線境界線により定まる車両の走行車線内に限定することを特徴とする車載周辺物体報知システムである。
報知制御装置に係る第2発明は、車両の周辺に存在している物体を検出する周辺物体検出装置(30)と、周辺物体検出装置が検出した物体の存在をドライバに報知する報知装置(60)とともに車載周辺物体報知システムに用いられる報知制御装置(70)であって、車両のドライバの視線を逐次検出する視線検出部(S214−S218)と、視線検出部が検出した視線に基づいて定まる認識方向範囲を、周辺物体検出装置の物体検出範囲に基づいて定まる基準報知範囲から除外して報知範囲を設定し、周辺物体検出装置が検出した物体が報知範囲内に存在していることに基づいて、物体が存在することを報知装置に報知させる報知制御部(S106−S110、S202−S212、S220、S222、S312−S318、S400)とを備え、報知制御部は、視線検出部が逐次検出した視線を最新のものから規定数用いて認識方向範囲を決定するようになっており、かつ、規定数を、車両の車速に応じて2種類以上に異ならせ、車速が相対的に速い場合、車速が相対的に遅い場合よりも、規定数を少なくし、車線の境界を表す車線境界線の位置を検出する境界線検出部(S102、S104)をさらに備え、報知制御部は、境界線検出部が車両が走行する車線の車線境界線を検出した場合、基準報知範囲を、周辺物体検出装置の物体検出範囲のうち、車線境界線により定まる車両の走行車線内に限定することを特徴とする。
第1車載周辺物体報知システムは、車車間通信装置と、位置検出装置と、車車間通信装置が認識方向情報を受信した場合、受信した認識方向情報に基づいて定まる第2車両のドライバの認識方向範囲と、位置検出装置が検出した第1車両の現在位置に基づいて、第2車両のドライバが第1車両を認識しているか否かを決定する自車認識状態決定部(S308、S310)とを備え、報知制御部は、第2車両が認識方向範囲内に存在しているか否か、および、自車認識状態決定部が、第2車両のドライバが第1車両を認識しているか否かに基づいて、第2車両が存在することを報知装置に報知させるか否かを決定する。
図2に示すように、車載周辺物体報知システム1は、ドライバカメラ10、フロントカメラ20、周辺物体検出装置30、位置検出装置40、車車間通信装置50、報知装置60、演算装置70を備える。
制御部72は、図3に示す処理を、所定の条件が成立しているとき、たとえば、イグニッションオンの間、あるいは、前進走行している間、周期的に実行する。
以上、説明した本実施形態によれば、ドライバの視線方向を逐次算出し(S216)、この逐次算出した視線方向からドライバの認識方向範囲を決定している(S220)。認識方向範囲は、ドライバが物体の存在を認識していると推定できる方向を表している範囲である。そこで、認識方向範囲に対応する小報知範囲Rを無効化する(S222)。換言すれば、認識方向範囲に対応する小報知範囲Rを除外して報知範囲を設定することになる。これにより、ドライバが視線を向けて認識した物体の存在を報知してしまうことが抑制できる。したがって、ドライバが認識している物体の存在を報知してしまい、ドライバに煩わしさを与えてしまうことを抑制できる。
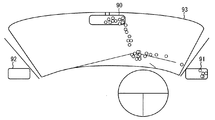
たとえば、前述の実施形態では、自車両よりも前方の小報知範囲Rは30度ずつである一方、自車両よりも後方の小報知範囲Rは、ルームミラー90、サイドミラー91、92により視認できる範囲に基づいて決定されていたため、30度ずつではなかった。しかし、図10に示すように、小報知範囲R1〜R12を、全て30度ずつの範囲に設定してもよい。
また、小報知範囲Rおよび認識方向範囲を物体の角度範囲に応じて可変にしてもよい。すなわち、ドライバが認識した物体が存在する角度範囲を認識方向範囲とし、その認識方向範囲以外の基準報知範囲を有効な報知範囲としてもよい。
周辺物体検出装置30は、赤外線センサに限られず、ソナー、ミリ波レーダ、レーザレーダ、カメラ等、物体を検出することができる公知の種々の装置を用いることができる。
前述の実施形態における報知車線限定処理(S100)を実行しなくてもよい(変形例4)。また、基準報知範囲を車線内範囲3に限定しない場合に限り、相互認識判定処理(S300)を実行してもよい(変形例5)。また、基準方向範囲を車線内範囲3に設定していても、自車両が進路方向変化を検出した場合に、基準方向範囲を物体検出範囲2に変更してもよい(変形例6)。自車両の進路方向変化は、たとえば、右あるいは左の方向指示灯の点灯、単位時間当たりの操舵角の変化量が一定量を超えたことに基づいて判断する。
前述の実施形態では、認識方向範囲を決定するのに用いる視線方向の数を規定する規定数を、車速が20km/h以上であるか、20km/h未満であるかの2種類の速度範囲で異ならせていた。しかし、これに限られず、3種類以上の速度範囲に対応させて、この規定数を3種類以上の値に変化させてもよい。
Claims (7)
- 車両の周辺に存在している物体を検出する周辺物体検出装置(30)と、
前記周辺物体検出装置が検出した物体の存在をドライバに報知する報知装置(60)と、
前記車両の前記ドライバの視線を逐次検出する視線検出部(S214−S218)と、
前記視線検出部が検出した前記視線に基づいて定まる認識方向範囲を、前記周辺物体検出装置の物体検出範囲に基づいて定まる基準報知範囲から除外して報知範囲を設定し、前記周辺物体検出装置が検出した前記物体が報知範囲内に存在していることに基づいて、前記物体が存在することを前記報知装置に報知させる報知制御部(S106−S110、S202−S212、S220、S222、S312−S318、S400)と、
車線の境界を表す車線境界線の位置を検出する境界線検出部(S102、S104)とを備え、
前記報知制御部は、
前記境界線検出部が前記車両が走行する車線の車線境界線を検出している場合、前記基準報知範囲を、前記周辺物体検出装置の物体検出範囲のうち、前記車線境界線により定まる前記車両の走行車線内に限定し、
前記境界線検出部が前記車両が走行する車線の車線境界線を検出していない場合、前記基準報知範囲から前記認識方向範囲を除外した範囲を前記報知範囲とすることを特徴とする車載周辺物体報知システム。 - 車両の周辺に存在している物体を検出する周辺物体検出装置(30)と、
前記周辺物体検出装置が検出した物体の存在をドライバに報知する報知装置(60)と、
前記車両の前記ドライバの視線を逐次検出する視線検出部(S214−S218)と、
前記視線検出部が検出した前記視線に基づいて定まる認識方向範囲を、前記周辺物体検出装置の物体検出範囲に基づいて定まる基準報知範囲から除外して報知範囲を設定し、前記周辺物体検出装置が検出した前記物体が報知範囲内に存在していることに基づいて、前記物体が存在することを前記報知装置に報知させる報知制御部(S106−S110、S202−S212、S220、S222、S312−S318、S400)とを備え、
前記報知制御部は、前記視線検出部が逐次検出した視線を最新のものから規定数用いて前記認識方向範囲を決定するようになっており、かつ、前記規定数を、前記車両の車速に応じて2種類以上に異ならせ、前記車速が相対的に速い場合、前記車速が相対的に遅い場合よりも、前記規定数を少なくし、
車線の境界を表す車線境界線の位置を検出する境界線検出部(S102、S104)をさらに備え、
前記報知制御部は、前記境界線検出部が前記車両が走行する車線の車線境界線を検出した場合、前記基準報知範囲を、前記周辺物体検出装置の物体検出範囲のうち、前記車線境界線により定まる前記車両の走行車線内に限定することを特徴とする車載周辺物体報知システム。 - 第1車両に搭載された請求項1または2に記載の車載周辺物体報知システムである第1車載周辺物体報知システムと、
第2車両に搭載された請求項1または2に記載の車載周辺物体報知システムである第2車載周辺物体報知システムと、を備えた物体報知システムであって、
前記第2車載周辺物体報知システムは、
他車両との間で、無線により信号の送受信を行う車車間通信装置(50)と、
現在位置を検出する位置検出装置(40)と、
前記第2車両の進行方位を取得する方位取得部(S304)と、
前記位置検出装置が検出した前記現在位置と、前記方位取得部が取得した前記進行方位と、前記視線検出部が検出した前記視線、または、それらから定まる前記第2車両のドライバの前記認識方向範囲を表す情報である認識方向情報を、前記車車間通信装置から送信させる送信制御部(S302、S306)とを備え、
前記第1車載周辺物体報知システムは、
前記車車間通信装置と、
前記位置検出装置と、
前記車車間通信装置が前記認識方向情報を受信した場合、受信した前記認識方向情報に基づいて定まる前記第2車両のドライバの認識方向範囲と、前記位置検出装置が検出した前記第1車両の現在位置に基づいて、前記第2車両のドライバが前記第1車両を認識しているか否かを決定する自車認識状態決定部(S308、S310)とを備え、
前記報知制御部は、前記第2車両が前記認識方向範囲内に存在しているか否か、および、前記自車認識状態決定部が、前記第2車両のドライバが前記第1車両を認識しているか否かに基づいて、前記第2車両が存在することを前記報知装置に報知させるか否かを決定することを特徴とする物体報知システム。 - 請求項3において、
前記報知制御部は、前記第2車両が前記認識方向範囲内に存在していても、前記自車認識状態決定部が、前記第2車両のドライバが前記第1車両を認識していないと決定している場合、前記第2車両が存在することを報知することを特徴とする物体報知システム。 - 請求項3または4において、
前記報知制御部は、前記第2車両が前記認識方向範囲内に存在しており、かつ、前記自車認識状態決定部が、前記第2車両のドライバが前記第1車両を認識していると決定していることに基づいて、前記第2車両が存在することの報知を不要とすることを特徴とする物体報知システム。 - 車両の周辺に存在している物体を検出する周辺物体検出装置(30)と、前記周辺物体検出装置が検出した物体の存在をドライバに報知する報知装置(60)とともに車載周辺物体報知システムに用いられる報知制御装置(70)であって、
前記車両の前記ドライバの視線を逐次検出する視線検出部(S214−S218)と、
前記視線検出部が検出した前記視線に基づいて定まる認識方向範囲を、前記周辺物体検出装置の物体検出範囲に基づいて定まる基準報知範囲から除外して報知範囲を設定し、前記周辺物体検出装置が検出した前記物体が報知範囲内に存在していることに基づいて、前記物体が存在することを前記報知装置に報知させる報知制御部(S106−S110、S202−S212、S220、S222、S312−S318、S400)と、
車線の境界を表す車線境界線の位置を検出する境界線検出部(S102、S104)とを備え、
前記報知制御部は、前記境界線検出部が前記車両が走行する車線の車線境界線を検出した場合、前記基準報知範囲を、前記周辺物体検出装置の物体検出範囲のうち、前記車線境界線により定まる前記車両の走行車線内に限定することを特徴とする報知制御装置。 - 車両の周辺に存在している物体を検出する周辺物体検出装置(30)と、前記周辺物体検出装置が検出した物体の存在をドライバに報知する報知装置(60)とともに車載周辺物体報知システムに用いられる報知制御装置(70)であって、
前記車両の前記ドライバの視線を逐次検出する視線検出部(S214−S218)と、
前記視線検出部が検出した前記視線に基づいて定まる認識方向範囲を、前記周辺物体検出装置の物体検出範囲に基づいて定まる基準報知範囲から除外して報知範囲を設定し、前記周辺物体検出装置が検出した前記物体が報知範囲内に存在していることに基づいて、前記物体が存在することを前記報知装置に報知させる報知制御部(S106−S110、S202−S212、S220、S222、S312−S318、S400)とを備え、
前記報知制御部は、前記視線検出部が逐次検出した視線を最新のものから規定数用いて前記認識方向範囲を決定するようになっており、かつ、前記規定数を、前記車両の車速に応じて2種類以上に異ならせ、前記車速が相対的に速い場合、前記車速が相対的に遅い場合よりも、前記規定数を少なくし、
車線の境界を表す車線境界線の位置を検出する境界線検出部(S102、S104)をさらに備え、
前記報知制御部は、前記境界線検出部が前記車両が走行する車線の車線境界線を検出した場合、前記基準報知範囲を、前記周辺物体検出装置の物体検出範囲のうち、前記車線境界線により定まる前記車両の走行車線内に限定することを特徴とする報知制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014225551A JP6582392B2 (ja) | 2014-11-05 | 2014-11-05 | 車載周辺物体報知システム、物体報知システム、報知制御装置 |
| US15/520,215 US10068481B2 (en) | 2014-11-05 | 2015-10-19 | Vehicle-mounted peripheral object notification system, object notification system, and notification control apparatus |
| PCT/JP2015/005256 WO2016072053A1 (ja) | 2014-11-05 | 2015-10-19 | 車載周辺物体報知システム、物体報知システム、及び報知制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014225551A JP6582392B2 (ja) | 2014-11-05 | 2014-11-05 | 車載周辺物体報知システム、物体報知システム、報知制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019087835A Division JP2019117668A (ja) | 2019-05-07 | 2019-05-07 | 車載周辺物体報知システム、物体報知システム、報知制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016091329A JP2016091329A (ja) | 2016-05-23 |
| JP2016091329A5 JP2016091329A5 (ja) | 2017-02-16 |
| JP6582392B2 true JP6582392B2 (ja) | 2019-10-02 |
Family
ID=55908800
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014225551A Expired - Fee Related JP6582392B2 (ja) | 2014-11-05 | 2014-11-05 | 車載周辺物体報知システム、物体報知システム、報知制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10068481B2 (ja) |
| JP (1) | JP6582392B2 (ja) |
| WO (1) | WO2016072053A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102019288B1 (ko) * | 2016-12-29 | 2019-09-06 | (주)캠시스 | 주차 보조 방법 및 장치 |
| JP6722132B2 (ja) * | 2017-04-27 | 2020-07-15 | クラリオン株式会社 | 推奨運転出力装置、推奨運転出力方法、及び推奨運転出力システム |
| US10023204B1 (en) * | 2017-12-01 | 2018-07-17 | StradVision, Inc. | Driving assisting method and driving assisting device using the same |
| JP6823003B2 (ja) | 2018-03-29 | 2021-01-27 | 本田技研工業株式会社 | 出力装置 |
| CN110126726A (zh) * | 2019-05-23 | 2019-08-16 | 广州小鹏汽车科技有限公司 | 一种车辆警示的提示方法和装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4385392B2 (ja) * | 2000-06-15 | 2009-12-16 | マツダ株式会社 | 車両用情報提供装置 |
| JP3882568B2 (ja) | 2001-10-17 | 2007-02-21 | 日産自動車株式会社 | 車両用接近報知装置 |
| JP4055070B2 (ja) * | 2003-03-27 | 2008-03-05 | アイシン精機株式会社 | 車両用警報装置 |
| JP4645891B2 (ja) * | 2005-03-24 | 2011-03-09 | 日本精機株式会社 | 車両用運転支援装置及び車両用運転支援方法 |
| JP2007249757A (ja) * | 2006-03-17 | 2007-09-27 | Denso It Laboratory Inc | 警報装置 |
| JP2007286898A (ja) * | 2006-04-17 | 2007-11-01 | Denso Corp | 運転支援装置及びプログラム |
| JP2012022646A (ja) | 2010-07-16 | 2012-02-02 | Fujitsu Ltd | 視線方向検出装置、視線方向検出方法及び安全運転評価システム |
| JP5273300B2 (ja) * | 2011-03-18 | 2013-08-28 | トヨタ自動車株式会社 | 車両周辺監視装置 |
| JP5928081B2 (ja) * | 2012-03-28 | 2016-06-01 | 富士通株式会社 | 事故予防装置、事故予防方法およびプログラム |
| JP2014222421A (ja) * | 2013-05-14 | 2014-11-27 | 株式会社デンソー | 運転支援装置 |
-
2014
- 2014-11-05 JP JP2014225551A patent/JP6582392B2/ja not_active Expired - Fee Related
-
2015
- 2015-10-19 WO PCT/JP2015/005256 patent/WO2016072053A1/ja active Application Filing
- 2015-10-19 US US15/520,215 patent/US10068481B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10068481B2 (en) | 2018-09-04 |
| US20170316695A1 (en) | 2017-11-02 |
| WO2016072053A1 (ja) | 2016-05-12 |
| JP2016091329A (ja) | 2016-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3048022B1 (en) | Collision avoidance control system and control method | |
| US9905024B2 (en) | Object recognition device, vehicle having the same and method of controlling the same | |
| US9463796B2 (en) | Driving assistance apparatus | |
| CN108447302B (zh) | 信息处理装置以及记录介质 | |
| JP6252304B2 (ja) | 車両用認知通知装置、車両用認知通知システム | |
| JP6582392B2 (ja) | 車載周辺物体報知システム、物体報知システム、報知制御装置 | |
| CN107004368B (zh) | 车辆的行驶控制装置以及行驶控制方法 | |
| JP4811343B2 (ja) | 物体検出装置 | |
| WO2012147187A1 (ja) | 周辺車両検出装置 | |
| JP5761317B2 (ja) | 車載機 | |
| WO2016181618A1 (ja) | 監視対象領域設定装置および監視対象領域設定方法 | |
| JP2003123196A (ja) | 車両の周辺監視装置及びプログラム | |
| JP7107329B2 (ja) | 運転支援システム | |
| JP2007072641A (ja) | 危険車両検出装置 | |
| JP2006318093A (ja) | 車両用移動物体検出装置 | |
| JP2018133072A (ja) | 情報処理装置およびプログラム | |
| JP2008204281A (ja) | 物体検出装置、および車車間通信システム | |
| KR20190102827A (ko) | 교차로에서의 차량 자동 긴급 제동 시스템 및 방법 | |
| JP2008008679A (ja) | 物体検出装置、衝突予測装置、及び車両制御装置 | |
| JP2020134981A (ja) | 運転支援装置 | |
| JP2017162178A (ja) | 判定装置、判定方法、および判定プログラム | |
| JP2016162204A (ja) | 汚れ判定装置 | |
| JP2010003086A (ja) | ドライブレコーダー | |
| JP4872517B2 (ja) | 障害物認識装置 | |
| JP5606468B2 (ja) | 車両周辺監視装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170629 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180710 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180905 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190507 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20190520 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190819 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6582392 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |