JP6571174B2 - 骨固定アセンブリ - Google Patents
骨固定アセンブリ Download PDFInfo
- Publication number
- JP6571174B2 JP6571174B2 JP2017515675A JP2017515675A JP6571174B2 JP 6571174 B2 JP6571174 B2 JP 6571174B2 JP 2017515675 A JP2017515675 A JP 2017515675A JP 2017515675 A JP2017515675 A JP 2017515675A JP 6571174 B2 JP6571174 B2 JP 6571174B2
- Authority
- JP
- Japan
- Prior art keywords
- bone
- actuator
- tension
- bone fixation
- fixation device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
- A61B17/8861—Apparatus for manipulating flexible wires or straps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
- A61B17/8869—Tensioning devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/82—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin for bone cerclage
- A61B17/823—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin for bone cerclage for the sternum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/84—Fasteners therefor or fasteners being internal fixation devices
- A61B17/842—Flexible wires, bands or straps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
- A61B17/8863—Apparatus for shaping or cutting osteosynthesis equipment by medical personnel
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
- A61B17/8872—Instruments for putting said fixation devices against or away from the bone
Description
本願は、2014年5月30日付の米国特許出願第62/005,552号の利益を主張し、その開示内容は、その全体があたかも本明細書に陳述されているかのように、参照により本明細書に組み込まれる。
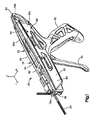
(1) 前端と、前記前端から後方向に離間された後端とを有する骨固定器具であって、前記骨固定器具は、骨固定部材に張力を適用して、前記骨固定部材を標的の骨の周囲に締め付けるように構成されており、
前記骨固定部材の自由端に取り付けるように構成されている握り部と、
トラベラであって、前記握り部が前記骨固定部材に取り付けられているとき、前記トラベラが前記後方向に移動するにつれて、前記骨固定部材における張力を増大させるために前記握り部が前記トラベラとともに前記後方向に移動するように、前記握り部を支持する、トラベラと、
カッター刃を運ぶカッターアームであって、前記握り部が前記骨固定部材に取り付けられているとき、前記カッター刃が前記骨固定部材の前記自由端を切断する切断位置まで前記カッター刃を移動させるように構成されている、カッターアームと、
選択的に独立して前記トラベラ及び前記カッターアームと連結するように構成されているアクチュエータと、
第1の位置と第2の位置との間で移動可能であるトグル部材であって、1)前記トグル部材が前記第1の位置にあるとき、前記骨固定器具は、前記アクチュエータの移動が前記トラベラを前記後方向に移動させ、それによって前記握り部が前記骨固定部材に取り付けられているとき、前記骨固定部材における前記張力を増大させる、張力モードであり、2)前記トグル部材が前記第2の位置にあるとき、前記骨固定器具は、前記アクチュエータの移動が前記カッターアームに前記カッター刃を前記切断位置まで移動させる、切断モードである、トグル部材と、を備える、骨固定器具。
(2) 前記骨固定器具が前記張力モードであり、前記握り部が前記骨固定部材に取り付けられているとき、前記アクチュエータの移動は、前記骨固定部材における前記張力が所定の張力に達するまで前記トラベラを前記後方向に移動させる、実施態様1に記載の骨固定器具。
(3) 張力リミタと前記トラベラとの間に連結される、力伝達部材と張力リミタとを更に備え、前記力伝達部材は、前記骨固定部材が前記張力モードであるとき、前記アクチュエータと連結され、前記骨固定部材が前記切断モードであるとき、前記アクチュエータから分離される、実施態様1又は2に記載の骨固定器具。
(4) 前記張力リミタの前記変形は、前記骨固定部材における前記張力が所定の張力未満であるとき、前記アクチュエータの前記第2の位置に向かう移動に応じて前記トラベラを後方に移動させ、前記骨固定部材における前記張力が前記所定の張力に達するとき、前記アクチュエータの前記第2の位置に向かう移動に応じて前記トラベラを前記後方向に移動させない、実施態様3に記載の骨固定器具。
(5) 前記張力リミタは、前記骨固定器具が前記張力モードである間に前記アクチュエータが前記第2の位置から前記第1の位置に向かって移動するとき、前記トラベラを前記後方向と反対側の前方向に更に移動させる、実施態様3又は4に記載の骨固定器具。
(7) 前記付勢力が前記骨固定部材における前記張力を超えるときに、前記トラベラが後方に移動する、実施態様6に記載の骨固定器具。
(8) 前記付勢力が前記骨固定部材における前記張力以下であるときに、前記トラベラが静止したままである、実施態様7に記載の骨固定器具。
(9) 前記握り部が前記後方向に移動する間に、前記握り部が前記骨固定部材の前記自由端と連動し、前記握り部が前記前方向に移動するとき、前記握り部が前記骨固定部材の前記自由端に沿って動く、実施態様5〜8のいずれかに記載の骨固定器具。
(10) 前記握り部が、前記固定部材の相補形の歯と連動するように構成されている歯をそれぞれ有する第1及び第2の握り部部材を更に備える、実施態様1〜9のいずれかに記載の骨固定器具。
(12) 前記アクチュエータが、ピボットピンを受容する溝を画定し、前記骨固定器具が前記張力モードであるとき、前記ピボットピンが第1の位置にあり、前記骨固定器具が前記切断モードであるとき、前記ピボットピンが前記第1の位置から前記後方向に離間された第2の位置にある、実施態様11に記載の骨固定器具。
(13) 前記骨固定器具が前記切断モードであるとき、前記トグル部材の前記第2の位置への移動が、前記アクチュエータを前記カッターアームに隣接させる、実施態様1〜12のいずれかに記載の骨固定器具。
(14) 前記アクチュエータは、作動ピンを画定し、前記作動ピンは、前記骨固定器具が前記張力モードであるとき、前記力伝達部材の溝に受容され、前記骨固定器具が前記切断モードであるとき、前記溝から離れる、実施態様1〜13のいずれかに記載の骨固定器具。
(15) 前記骨固定器具が前記切断モードであるとき、前記作動ピンが、前記切断部材と隣接する、実施態様14に記載の骨固定器具。
(17) 前記トグル部材を前記第2の位置から前記第1の位置に向かって付勢するばね力に抗して、前記トグル部材を前記第2の位置に取り外し可能にロックするように構成されているロック部材を更に備える、実施態様1〜16のいずれかに記載の骨固定器具。
(18) 前記切断刃が前記骨固定部材の前記自由端を切断した後で前記トグル部材から前記ロック部材を取り外すために、前記切断部材が前記ロック部材と隣接するように構成されている、実施態様17に記載の骨固定器具。
(19) 実施態様1〜18のいずれかに記載の前記骨固定器具と、前記骨固定部材と、を備える、骨固定アセンブリ。
(20) 前端と、前記前端から後方向に離間された後端とを有する骨固定器具であって、前記骨固定器具は、骨固定部材に張力を適用して、前記骨固定部材を標的の骨の周囲に締め付けるように構成されており、
前記骨固定部材の自由端に取り付けるように構成されている握り部と、
トラベラであって、前記握り部が前記骨固定部材に取り付けられているとき、前記トラベラが前記後方向に移動するにつれて、前記骨固定部材における張力を増大させるために前記握り部が前記トラベラとともに前記後方向に移動するように、前記握り部を支持する、トラベラと、
カッター刃を運ぶカッターアームであって、前記カッターアームは、前記握り部が前記骨固定部材に取り付けられているとき、前記カッター刃が前記骨固定部材の前記自由端を切断する切断位置まで前記カッター刃を移動させるように構成されている、カッターアームと、
第1のピボット軸及び前記第1のピボット軸から離間される第2のピボット軸の周囲を選択的に旋回するように構成されるアクチュエータであって、前記アクチュエータが前記第1のピボット軸の周囲を旋回するとき、前記アクチュエータが前記トラベラに対し前記後方向に力を加え、前記アクチュエータが前記第2のピボット軸の周囲を旋回するとき、前記アクチュエータが前記カッター部材に力を加え、これにより前記カッター部材に前記切断刃を前記切断位置に移動させる、アクチュエータと、を備える、骨固定器具。
(22) 前記アクチュエータが前記第1のピボット軸の周囲を旋回するとき、前記アクチュエータが前記トラベラと連結され、前記アクチュエータが前記第2のピボット軸の周囲を旋回するとき、前記アクチュエータが前記カッターアームと連結される、実施態様20又は21に記載の骨固定器具。
(23) 前記アクチュエータが前記第1のピボット軸の周囲を旋回するとき、前記アクチュエータが前記カッターアームから分離され、前記アクチュエータが前記第2のピボット軸の周囲を旋回するとき、前記アクチュエータが前記トラベラから分離される、実施態様20〜22のいずれかに記載の骨固定器具。
(24) 第1の位置と第2の位置との間で移動可能であるトグル部材を更に備え、1)前記トグル部材が前記第1の位置にあるとき、前記骨固定器具は、前記握り部が前記骨固定部材に取り付けられているとき、前記第1のピボット軸の周囲の前記アクチュエータの移動が、前記骨固定部材における前記張力が所定の張力に達するまで、前記トラベラを前記後方向に移動させる、張力モードであり、2)前記トグル部材が前記第2の位置にあるとき、前記骨固定器具は、前記第2のピボット軸の周囲の前記アクチュエータの移動が前記カッターアームに前記カッター刃を前記切断位置まで移動させる、切断モードである、実施態様20〜23のいずれかに記載の骨固定器具。
(25) 実施態様20〜24のいずれかに記載の前記骨固定器具と、前記骨固定部材とを備える、骨固定アセンブリ。
Claims (19)
- 前端と、前記前端から後方向に離間された後端とを有する骨固定器具であって、前記骨固定器具は、骨固定部材に張力を適用して、前記骨固定部材を標的の骨の周囲に締め付けるように構成されており、
前記骨固定部材の自由端に取り付けるように構成されている握り部と、
トラベラであって、前記握り部が前記骨固定部材に取り付けられているとき、前記トラベラが前記後方向に移動するにつれて、前記骨固定部材における張力を増大させるために前記握り部が前記トラベラとともに前記後方向に移動するように、前記握り部を支持する、トラベラと、
カッター刃を運ぶカッターアームであって、前記握り部が前記骨固定部材に取り付けられているとき、前記カッター刃が前記骨固定部材の前記自由端を切断する切断位置まで前記カッター刃を移動させるように構成されている、カッターアームと、
選択的に独立して前記トラベラ及び前記カッターアームと連結するように構成されているアクチュエータと、
第1の位置と第2の位置との間で移動可能であるトグル部材であって、1)前記トグル部材が前記第1の位置にあるとき、前記骨固定器具は、前記アクチュエータの移動が前記トラベラを前記後方向に移動させ、それによって前記握り部が前記骨固定部材に取り付けられているとき、前記骨固定部材における前記張力を増大させる、張力モードであり、2)前記トグル部材が前記第2の位置にあるとき、前記骨固定器具は、前記アクチュエータの移動が前記カッターアームに前記カッター刃を前記切断位置まで移動させる、切断モードである、トグル部材と、
前記骨固定部材が前記張力モードであるとき、前記アクチュエータと連結され、前記骨固定部材が前記切断モードであるとき、前記アクチュエータから分離される、力伝達部材と、を備え、前記アクチュエータは、作動ピンを画定し、前記作動ピンは、前記骨固定器具が前記張力モードであるとき、前記力伝達部材の溝に受容され、前記骨固定器具が前記切断モードであるとき、前記溝から離れる、骨固定器具。 - 前記骨固定器具が前記張力モードであり、前記握り部が前記骨固定部材に取り付けられているとき、前記アクチュエータの移動は、前記骨固定部材における前記張力が所定の張力に達するまで前記トラベラを前記後方向に移動させる、請求項1に記載の骨固定器具。
- 前記力伝達部材と前記トラベラとの間に連結される、張力リミタを更に備える、請求項1又は2に記載の骨固定器具。
- 前記張力リミタの変形は、前記骨固定部材における前記張力が所定の張力未満であるとき、前記アクチュエータの前記第2の位置に向かう移動に応じて前記トラベラを後方に移動させ、前記骨固定部材における前記張力が前記所定の張力に達するとき、前記アクチュエータの前記第2の位置に向かう移動に応じて前記トラベラを前記後方向に移動させない、請求項3に記載の骨固定器具。
- 前記張力リミタは、前記骨固定器具が前記張力モードである間に前記アクチュエータが前記第2の位置から前記第1の位置に向かって移動するとき、前記トラベラを前記後方向と反対側の前方向に更に移動させる、請求項3又は4に記載の骨固定器具。
- 前記張力リミタが、前記アクチュエータと前記トラベラとの間に接続されるばね部材を備え、前記骨固定器具が前記張力モードであるとき、前記アクチュエータの動きが、前記ばね部材を屈曲させ、かつ付勢力下で前記トラベラを後方に付勢させる、請求項3〜5のいずれか一項に記載の骨固定器具。
- 前記付勢力が前記骨固定部材における前記張力を超えるときに、前記トラベラが後方に移動する、請求項6に記載の骨固定器具。
- 前記握り部が前記後方向に移動する間に、前記握り部が前記骨固定部材の前記自由端と連動し、前記握り部が前記後方向と反対側の前方向に移動するとき、前記握り部が前記骨固定部材の前記自由端に沿って動く、請求項5〜7のいずれか一項に記載の骨固定器具。
- 前記骨固定器具が前記張力モードであるとき、前記アクチュエータが第1の軸の周囲を移動し、前記骨固定器具が前記切断モードであるとき、前記アクチュエータが前記第1の軸から離間される第2の軸の周囲を移動する、請求項1〜8のいずれか一項に記載の骨固定器具。
- 前記アクチュエータが、ピボットピンを受容する溝を画定し、前記骨固定器具が前記張力モードであるとき、前記ピボットピンが第1の位置にあり、前記骨固定器具が前記切断モードであるとき、前記ピボットピンが前記第1の位置から前記後方向に離間された第2の位置にある、請求項9に記載の骨固定器具。
- 前記骨固定器具が前記切断モードであるとき、前記トグル部材の前記第2の位置への移動が、前記アクチュエータを前記カッターアームに隣接させる、請求項1〜10のいずれか一項に記載の骨固定器具。
- 前記アクチュエータは、作動ピンを画定し、前記作動ピンは、前記骨固定器具が前記張力モードであるとき、前記力伝達部材の溝に受容され、前記骨固定器具が前記切断モードであるとき、前記溝から離れる、請求項1〜11のいずれか一項に記載の骨固定器具。
- 前記骨固定器具が前記切断モードであるとき、前記作動ピンが、前記カッターアームと隣接する、請求項12に記載の骨固定器具。
- 前記アクチュエータの動きが、前記カッター刃を前記切断位置へ移動させるために前記作動ピンに前記カッターアームを駆動させる、請求項13に記載の骨固定器具。
- 前端と、前記前端から後方向に離間された後端とを有する骨固定器具であって、前記骨固定器具は、骨固定部材に張力を適用して、前記骨固定部材を標的の骨の周囲に締め付けるように構成されており、
前記骨固定部材の自由端に取り付けるように構成されている握り部と、
トラベラであって、前記握り部が前記骨固定部材に取り付けられているとき、前記トラベラが前記後方向に移動するにつれて、前記骨固定部材における張力を増大させるために前記握り部が前記トラベラとともに前記後方向に移動するように、前記握り部を支持する、トラベラと、
カッター刃を運ぶカッターアームであって、前記カッターアームは、前記握り部が前記骨固定部材に取り付けられているとき、前記カッター刃が前記骨固定部材の前記自由端を切断する切断位置まで前記カッター刃を移動させるように構成されている、カッターアームと、
第1のピボット軸及び前記第1のピボット軸から離間される第2のピボット軸の周囲を選択的に旋回するように構成されるアクチュエータであって、前記アクチュエータが前記第1のピボット軸の周囲を旋回するとき、前記骨固定器具は、前記アクチュエータが前記トラベラに対し前記後方向に力を加える、張力モードであり、前記アクチュエータが前記第2のピボット軸の周囲を旋回するとき、前記骨固定器具は、前記アクチュエータが前記カッターアームに力を加え、これにより前記カッター刃を前記切断位置に移動させる、切断モードである、アクチュエータと、を備え、
前記アクチュエータが、ピボットピンを受容する溝を画定し、前記ピボットピンは、前記第1のピボット軸を画定するように前記溝内の第1の位置にあり、前記ピボットピンは、前記第2のピボット軸を画定するように前記第1の位置から前記後方向に離間された前記溝内の第2の位置にある、骨固定器具。 - 前記アクチュエータが、選択的に独立して前記トラベラ及び前記カッターアームと連結されるように構成されている、請求項15に記載の骨固定器具。
- 前記アクチュエータが前記第1のピボット軸の周囲を旋回するとき、前記アクチュエータが前記トラベラと連結され、前記アクチュエータが前記第2のピボット軸の周囲を旋回するとき、前記アクチュエータが前記カッターアームと連結される、請求項15又は16に記載の骨固定器具。
- 前記アクチュエータが前記第1のピボット軸の周囲を旋回するとき、前記アクチュエータが前記カッターアームから分離され、前記アクチュエータが前記第2のピボット軸の周囲を旋回するとき、前記アクチュエータが前記トラベラから分離される、請求項15〜17のいずれか一項に記載の骨固定器具。
- 第1の位置と第2の位置との間で移動可能であるトグル部材を更に備え、1)前記トグル部材が前記第1の位置にあるとき、前記骨固定器具は、前記握り部が前記骨固定部材に取り付けられているとき、前記第1のピボット軸の周囲の前記アクチュエータの移動が、前記骨固定部材における前記張力が所定の張力に達するまで、前記トラベラを前記後方向に移動させる、張力モードであり、2)前記トグル部材が前記第2の位置にあるとき、前記骨固定器具は、前記第2のピボット軸の周囲の前記アクチュエータの移動が前記カッターアームに前記カッター刃を前記切断位置まで移動させる、切断モードである、請求項15〜18のいずれか一項に記載の骨固定器具。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462005552P | 2014-05-30 | 2014-05-30 | |
| US62/005,552 | 2014-05-30 | ||
| PCT/US2015/029214 WO2015183485A1 (en) | 2014-05-30 | 2015-05-05 | Bone fixation assembly |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017520359A JP2017520359A (ja) | 2017-07-27 |
| JP2017520359A5 JP2017520359A5 (ja) | 2018-06-21 |
| JP6571174B2 true JP6571174B2 (ja) | 2019-09-04 |
Family
ID=53181353
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017515675A Expired - Fee Related JP6571174B2 (ja) | 2014-05-30 | 2015-05-05 | 骨固定アセンブリ |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9603646B2 (ja) |
| EP (1) | EP3148462B1 (ja) |
| JP (1) | JP6571174B2 (ja) |
| CN (1) | CN106470628B (ja) |
| AU (1) | AU2015267531B2 (ja) |
| CA (1) | CA2950706A1 (ja) |
| WO (1) | WO2015183485A1 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9084644B2 (en) | 2011-02-02 | 2015-07-21 | DePuy Synthes Products, Inc. | Bone fixation assembly |
| US8740949B2 (en) | 2011-02-24 | 2014-06-03 | Spinal Elements, Inc. | Methods and apparatus for stabilizing bone |
| USD739935S1 (en) | 2011-10-26 | 2015-09-29 | Spinal Elements, Inc. | Interbody bone implant |
| WO2014014815A1 (en) * | 2012-07-14 | 2014-01-23 | Charles Lang | Bone fixation device and method |
| US10010359B2 (en) | 2013-03-15 | 2018-07-03 | Zimmer Biomet CMF and Thoracic, LLC | Sternal closure cerclage, plate implant and instrumentation |
| US9820755B2 (en) | 2013-03-15 | 2017-11-21 | Zimmer Biomet CMF and Thoracic, LLC | Sternal closure cerclage, plate implant and instrumentation |
| US9456855B2 (en) | 2013-09-27 | 2016-10-04 | Spinal Elements, Inc. | Method of placing an implant between bone portions |
| US9839450B2 (en) | 2013-09-27 | 2017-12-12 | Spinal Elements, Inc. | Device and method for reinforcement of a facet |
| US9820793B1 (en) | 2014-04-21 | 2017-11-21 | Dallen Medical, Inc. | Tensioning devices and methods for dynamic suture systems |
| US10052143B2 (en) * | 2014-04-30 | 2018-08-21 | DePuy Synthes Products, Inc. | Tensioning instrument and related bone fixation systems and methods |
| EP3148462B1 (en) * | 2014-05-30 | 2018-04-18 | DePuy Synthes Products, Inc. | Bone fixation assembly |
| WO2016044432A1 (en) | 2014-09-17 | 2016-03-24 | Spinal Elements, Inc. | Flexible fastening band connector |
| FR3026636B1 (fr) * | 2014-10-01 | 2017-09-15 | Cousin Biotech | Ancillaire de mise en tension d'un element longiligne pour la fixation d'un implant sur un element osseux |
| CN107854169B (zh) * | 2017-11-10 | 2024-03-08 | 中国人民解放军总医院 | 骨固定针的锁定装置 |
| US11020149B2 (en) * | 2018-02-28 | 2021-06-01 | Globus Medical Inc. | Scoliosis correction systems, methods, and instruments |
| US11395687B2 (en) * | 2019-03-01 | 2022-07-26 | DePuy Synthes Products, Inc. | Insertion tool for flip anchor cable system insertion |
| US11457959B2 (en) * | 2019-05-22 | 2022-10-04 | Spinal Elements, Inc. | Bone tie and bone tie inserter |
| KR20220012308A (ko) * | 2019-05-22 | 2022-02-03 | 스피널 엘리먼츠, 인크. | 뼈 타이 및 뼈 타이 삽입기 |
| US11819255B2 (en) * | 2019-10-07 | 2023-11-21 | Ortho Development Corporation | Tether tensioning instrumentation and related methods |
| EP3815640B1 (en) | 2019-11-04 | 2023-08-09 | Stryker European Operations Limited | Surgical instrument for tightening a bone fixation member around bone |
| US11304733B2 (en) * | 2020-02-14 | 2022-04-19 | Spinal Elements, Inc. | Bone tie methods |
| CN111772760B (zh) * | 2020-08-18 | 2021-07-27 | 西安康拓医疗技术股份有限公司 | 一种胸骨缝合用扎带枪 |
| US11534222B2 (en) * | 2020-10-07 | 2022-12-27 | Globus Medical, Inc. | Tensioning instruments |
Family Cites Families (115)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1641077A (en) * | 1924-11-21 | 1927-08-30 | Fouquet Eugene | Binding and cutting pliers |
| US3111945A (en) * | 1961-01-05 | 1963-11-26 | Solbrig Charles R Von | Bone band and process of applying the same |
| US3169560A (en) | 1962-03-08 | 1965-02-16 | Panduit Corp | Binder strap tool |
| US3570497A (en) | 1969-01-16 | 1971-03-16 | Gerald M Lemole | Suture apparatus and methods |
| US3577601A (en) | 1969-03-12 | 1971-05-04 | Thomas & Betts Corp | Article fastening device |
| US3661187A (en) * | 1969-07-28 | 1972-05-09 | Panduit Corp | Strap-tensioning and severing tool |
| US3645302A (en) * | 1970-03-19 | 1972-02-29 | Panduit | Strap installation tool |
| US3830263A (en) * | 1973-06-07 | 1974-08-20 | Amp Inc | Strap applying tool |
| US4093005A (en) * | 1977-02-28 | 1978-06-06 | All States Plastic Manufacturing Co. Inc. | Cable tie gun |
| EP0009327A1 (en) | 1978-09-01 | 1980-04-02 | Herbert D. Huddleston | Hip nail and method for its use |
| DE3244680C2 (de) | 1982-12-02 | 1984-10-18 | Peter Dr. 8445 Schwarzach Clarenz | Vorrichtung zum Zusammenhalten der Teile eines gebrochenen Knochens |
| US4535764A (en) | 1983-04-15 | 1985-08-20 | Tayco Developments, Inc. | Surgical bone tie |
| US4955913A (en) | 1985-03-28 | 1990-09-11 | Robinson Walter C | Surgical tie |
| DE3517204A1 (de) | 1985-05-13 | 1986-11-13 | Gerald Dr. 8000 München Hauer | Dauerspannbares kunststoffband mit selbsthalterung |
| DE3538645A1 (de) | 1985-10-30 | 1987-05-07 | Gundolf Ferdinand | Vorrichtung zur osteosynthese von knochenfragmenten, insbesondere zur fixation von knochenfrakturen |
| US4730615A (en) | 1986-03-03 | 1988-03-15 | Pfizer Hospital Products Group, Inc. | Sternum closure device |
| WO1988006022A1 (en) | 1987-02-20 | 1988-08-25 | Farrell Edward M | Surgical tying devices |
| US4813416A (en) * | 1987-03-18 | 1989-03-21 | The Research Foundation Of State University Of New York | Bonding assembly and method for sternum closing |
| DE8709487U1 (ja) | 1987-07-09 | 1987-10-15 | Paul Hellermann Gmbh, 2080 Pinneberg, De | |
| US4966600A (en) * | 1989-01-26 | 1990-10-30 | Songer Robert J | Surgical securance method |
| DE4021246A1 (de) | 1990-07-04 | 1992-01-09 | Gundolf Ferdinand | Vorrichtung zur osteosynthese von knochenfragmenten, insbesondere zur fixation von knochenfrakturen |
| DE4024334A1 (de) | 1990-07-31 | 1992-02-06 | Gundolf Ferdinand | Vorrichtung zur osteosynthese von knochenfragmenten, insbesondere zur fixation von knochenfrakturen |
| DE4200757A1 (de) | 1991-01-14 | 1992-07-16 | Gundolf Ferdinand | Vorrichtung zur osteosynthese von knochenfragmenten, insbesondere zur fixation von knochenfrakturen |
| US5146645A (en) | 1991-03-01 | 1992-09-15 | The Procter & Gamble Company | Toothbrush employing resiliently buckling arch to indicate excessive brushing pressure |
| US5146654A (en) | 1991-05-03 | 1992-09-15 | Panduit Corp. | Stretched cable tie |
| GB9111972D0 (en) | 1991-06-04 | 1991-07-24 | Clinical Product Dev Ltd | Medical/surgical devices |
| KR930004380Y1 (ko) | 1991-06-14 | 1993-07-14 | 조우신 | 골유합술용 내고정금속판 |
| DE4127550A1 (de) | 1991-08-20 | 1993-02-25 | Telos Herstellung Und Vertrieb | Implantierbare verbindungsplatte zum befestigen eines elastischen flachbandes an einem knochen |
| US5361475A (en) | 1992-02-05 | 1994-11-08 | Daniels Manufacturing Corporation | Safety cable tool |
| GB9206018D0 (en) | 1992-03-19 | 1992-04-29 | Dall Desmond Meiring | Bone fixation system |
| US5193250A (en) | 1992-04-30 | 1993-03-16 | Panduit Corp. | Releasable cable tie |
| DE4224826C2 (de) * | 1992-07-27 | 1995-09-07 | United Carr Gmbh Trw | Vorrichtung zum Spannen mindestens eines um mindestens einen rohrförmigen Körper geschlungenen profilierten Bandelements |
| DE4228909C2 (de) | 1992-08-28 | 1994-06-09 | Ethicon Gmbh | Endoskopisches Instrument zur Applizierung von Ligaturbindern und Ligaturbinder |
| US5356417A (en) | 1992-10-09 | 1994-10-18 | United States Surgical Corporation | Absorbable sternum closure buckle |
| US5355913A (en) * | 1992-10-09 | 1994-10-18 | United States Surgical Corporation | Surgical repair device |
| US5403346A (en) | 1992-12-31 | 1995-04-04 | Loeser; Edward A. | Self-affixing suture assembly |
| US5496318A (en) | 1993-01-08 | 1996-03-05 | Advanced Spine Fixation Systems, Inc. | Interspinous segmental spine fixation device |
| US5366461A (en) | 1993-01-25 | 1994-11-22 | William Blasnik | Sternum banding assembly |
| EP0608592B1 (en) | 1993-01-26 | 1998-08-05 | Stony Brook Surgical Innovations, Inc. | Sternum banding assembly |
| FR2702951B1 (fr) | 1993-03-26 | 1995-06-16 | Cremascoli France | Dispositif de cerclage d'os. |
| US5540698A (en) * | 1993-04-21 | 1996-07-30 | Amei Technologies Inc. | System and method for securing a medical cable |
| WO1995001756A1 (de) | 1993-07-06 | 1995-01-19 | Ferdinand Gundolf | Vorrichtung zur osteosynthese von knochenfragmenten, insbesondere zur fixation von knochenfrakturen |
| EP0647436A1 (en) | 1993-10-06 | 1995-04-12 | SMITH & NEPHEW RICHARDS, INC. | Bone section reattachment apparatus |
| US5462542A (en) | 1994-01-24 | 1995-10-31 | United States Surgical Corporation | Sternum buckle with serrated strap |
| AU1967095A (en) | 1994-02-17 | 1995-09-04 | Surgical Accessories, Inc. | Fastener and tensioner for bone securing cable |
| US5607430A (en) | 1995-08-25 | 1997-03-04 | Biomet, Inc. | Bone stabilization implant having a bone plate portion with integral cable clamping means |
| US5636412A (en) | 1995-11-01 | 1997-06-10 | The Procter & Gamble Company | Fixed circumference binding device with non-protruding free end and method for binding therewith |
| FR2742649B1 (fr) | 1995-12-22 | 1998-04-10 | Robert Louis Boutet | Lien de cerclage a usage medical et son procede de pose |
| US5741259A (en) | 1996-02-22 | 1998-04-21 | Chan; Kwan-Ho | Surgical fastener device for use in bone fracture fixation |
| US5683404A (en) | 1996-06-05 | 1997-11-04 | Metagen, Llc | Clamp and method for its use |
| DE69733440T2 (de) * | 1996-08-28 | 2006-01-05 | Thomas & Betts Corp., Memphis | Kabelbinder-Installationswerkzeug |
| US5972006A (en) | 1997-01-28 | 1999-10-26 | Stony Brook Surgical Innovations, Inc. | Buckle securing means for sternum banding assembly |
| US5810824A (en) | 1997-02-13 | 1998-09-22 | Chan; Kwan-Ho | Surgical fastener assembly and method for bone fracture fixation |
| DE19716504A1 (de) | 1997-04-19 | 1998-12-03 | Hinze Manfred Dr Med Habil | Kompressionscerclage und Instrumentarium zum Befestigen derselben |
| EP0876798A3 (de) | 1997-05-05 | 2000-01-19 | Rainer Otto | Carclage-Spannvorrichtung für die Osteosynthese von Knochenfrakturen |
| DE19806628C2 (de) | 1998-02-18 | 2000-08-10 | Daimler Chrysler Aerospace | Kabelbinder für die Bündelung oder Befestigung von Leitungen |
| US6099527A (en) | 1998-04-30 | 2000-08-08 | Spinal Concepts, Inc. | Bone protector and method |
| US6482208B1 (en) * | 1998-11-25 | 2002-11-19 | Alliance Orthopedic, Inc. | Fracture reduction clamp |
| US6050998A (en) | 1999-05-21 | 2000-04-18 | Stephen A. Fletcher | Bone fastener |
| DE29916884U1 (de) | 1999-09-24 | 2000-11-02 | Link Waldemar Gmbh Co | Chirurgisches Cerclageband |
| US6514255B1 (en) | 2000-02-25 | 2003-02-04 | Bret Ferree | Sublaminar spinal fixation apparatus |
| US7993349B2 (en) * | 2000-07-27 | 2011-08-09 | Synthes Usa, Llc | Cranial flap clamp instrument |
| US6589246B1 (en) | 2001-04-26 | 2003-07-08 | Poly-4 Medical, Inc. | Method of applying an active compressive force continuously across a fracture |
| US6489246B1 (en) | 2001-05-01 | 2002-12-03 | Eastman Kodak Company | Method for manufacturing charge-coupled image sensors |
| US6520965B2 (en) | 2001-05-23 | 2003-02-18 | Alan Chervitz | Apparatus and method for orthopedic fixation |
| US6752810B1 (en) * | 2002-05-31 | 2004-06-22 | Pilling Weck Incorporated | Instrument and method for pulling and twisting a tie onto two separated items |
| US20030236538A1 (en) | 2002-06-19 | 2003-12-25 | Thomas Aikens | Artery and vein coupling tie string |
| FR2842724B1 (fr) | 2002-07-23 | 2005-05-27 | Spine Next Sa | Systeme de fixation vertebrale |
| US7164360B2 (en) | 2002-08-14 | 2007-01-16 | Mark Schiebler | Multi-use linkage device |
| GB0219280D0 (en) | 2002-08-19 | 2002-09-25 | Finsbury Dev Ltd | Prosthesis |
| JP2004113392A (ja) | 2002-09-25 | 2004-04-15 | Koseki Ika Kk | 胸骨縫合用バンド |
| JP2004113520A (ja) | 2002-09-26 | 2004-04-15 | Koseki Ika Kk | 針がインサート成型された手術用縫合材料 |
| US7582088B2 (en) * | 2003-02-07 | 2009-09-01 | Dsm Ip Assets B.V. | Bone fixing device |
| JP4098137B2 (ja) | 2003-03-31 | 2008-06-11 | 小池 央 | 人間以外の哺乳類生体からの臓器摘出方法、および卵巣子宮摘出方法 |
| GB0308647D0 (en) | 2003-04-15 | 2003-05-21 | Qualiteam S A S | Suture band |
| US7648504B2 (en) | 2003-09-09 | 2010-01-19 | Bioretec Ltd | Bioabsorbable band system |
| EP1720474A1 (en) * | 2004-01-30 | 2006-11-15 | DSM IP Assets B.V. | Fixing device for clamping the ends of a surgical cable used for fixing bone parts |
| JP4624124B2 (ja) * | 2004-02-13 | 2011-02-02 | トーマス・アンド・ベッツ・インターナショナル・インコーポレーテッド | ケーブル・タイ・ツールのための張力と抗反跳の機構 |
| GB2414936A (en) | 2004-06-09 | 2005-12-14 | Ravi Kumar Khetrapal | Fracture reduction apparatus |
| US7008429B2 (en) | 2004-06-23 | 2006-03-07 | Golobek Donald D | Bio-absorbable bone tie with convex head |
| US7229444B2 (en) | 2004-08-25 | 2007-06-12 | Howmedica Osteonics Corp. | Trochanteric cerclage plate |
| DE202004015582U1 (de) | 2004-10-07 | 2004-12-23 | Merete Medical Gmbh | Cerclagestift für die Fixation von Stabilisierungsplatten |
| WO2006062419A1 (en) | 2004-12-08 | 2006-06-15 | Enztec Limited | Securing means for surgical use |
| US20060142772A1 (en) | 2004-12-29 | 2006-06-29 | Ralph James D | Surgical fasteners and related implant devices having bioabsorbable components |
| GB0505505D0 (en) | 2005-03-17 | 2005-04-27 | Dall Desmond Meiring | Configurable bone fixation system |
| JP3721189B1 (ja) * | 2005-05-02 | 2005-11-30 | アルフレッサファーマ株式会社 | 骨締結ケーブル用緊縛装置 |
| US20060271060A1 (en) * | 2005-05-26 | 2006-11-30 | Arthrocare Corporation | Threaded knotless suture anchoring device and method |
| WO2006136938A1 (en) | 2005-06-24 | 2006-12-28 | Malan De Villiers | Interspinous stabilisation device |
| FI122342B (fi) | 2005-07-18 | 2011-12-15 | Bioretec Oy | Bioabsorboituva nauhajärjestelmä, bioabsorboituva nauha ja menetelmä bioabsorboituvan nauhan valmistamiseksi. |
| FR2890850B1 (fr) | 2005-09-20 | 2009-04-17 | Abbott Spine Sa | Systeme de fixation vertebrale |
| FR2890851B1 (fr) * | 2005-09-21 | 2008-06-20 | Abbott Spine Sa | Ancillaire de mise en tension d'un lien souple. |
| US8167915B2 (en) | 2005-09-28 | 2012-05-01 | Nuvasive, Inc. | Methods and apparatus for treating spinal stenosis |
| US7837717B2 (en) * | 2006-03-24 | 2010-11-23 | Depuy Products, Inc. | Fastening system for internal fixation |
| US7806895B2 (en) * | 2006-05-08 | 2010-10-05 | Device Evolutions Llc | Thoracic closure device and methods |
| FR2906704A1 (fr) | 2006-10-05 | 2008-04-11 | David Attia | Collier de serrage pour chirurgie orthopedique. |
| EP2117454A2 (en) * | 2007-01-10 | 2009-11-18 | DSM IP Assets B.V. | Method and device for tightening a surgical cable |
| WO2009013397A1 (fr) | 2007-07-25 | 2009-01-29 | Ros Guillen, Francisco | Dispositif de fixation vertébrale pour système de correction des courbures anormales du rachis |
| US8096998B2 (en) * | 2007-09-26 | 2012-01-17 | Ebi, Llc | External fixation tensioner |
| SE531907C2 (sv) | 2008-01-14 | 2009-09-08 | Odd Hoeglund | Anordning för vävnadsligering |
| US8888791B2 (en) * | 2008-10-07 | 2014-11-18 | Kardium Inc. | Surgical instrument and method for tensioning and securing a flexible suture |
| US9023058B2 (en) * | 2008-10-07 | 2015-05-05 | Kardium Inc. | Surgical instrument and method for tensioning and securing a flexible suture |
| WO2010041101A1 (en) | 2008-10-10 | 2010-04-15 | Universita Degli Studi Di Padova | Haemostatic device for surgical procedures and emergencies |
| US8758348B2 (en) | 2009-03-19 | 2014-06-24 | Figure 8 Surgical, Inc. | Systems and methods for sternum repair |
| US9107720B2 (en) * | 2009-06-02 | 2015-08-18 | Kinamed, Inc. | Surgical cable tensioning system |
| GB2474363B (en) * | 2009-10-09 | 2013-09-25 | Acute Innovations Llc | System for tensioning a surgical wire |
| JP5624552B2 (ja) * | 2009-10-23 | 2014-11-12 | アルフレッサファーマ株式会社 | 骨締結ケーブル用緊縛装置 |
| TWI578952B (zh) * | 2010-04-27 | 2017-04-21 | 星瑟斯有限公司 | 骨骼固定系統及其使用方法 |
| BRPI1002494B1 (pt) * | 2010-07-12 | 2015-08-18 | João Bosco De Oliveira | Cisalha com dispositivo tensor |
| US9084644B2 (en) * | 2011-02-02 | 2015-07-21 | DePuy Synthes Products, Inc. | Bone fixation assembly |
| US8984720B2 (en) * | 2011-12-28 | 2015-03-24 | Pioneer Surgical Technology, Inc. | Tensioning instrument and method |
| KR102093095B1 (ko) * | 2012-03-28 | 2020-03-26 | 신세스 게엠바하 | 골 고정 부재 시스템 및 사용 방법 |
| US9561064B2 (en) * | 2012-11-21 | 2017-02-07 | Pioneer Surgical Technology, Inc. | Bone plate system and method |
| US9439698B2 (en) * | 2013-03-15 | 2016-09-13 | Frontier Medical Devices, Inc. | Cable fixation device |
| US10052143B2 (en) * | 2014-04-30 | 2018-08-21 | DePuy Synthes Products, Inc. | Tensioning instrument and related bone fixation systems and methods |
| EP3148462B1 (en) * | 2014-05-30 | 2018-04-18 | DePuy Synthes Products, Inc. | Bone fixation assembly |
-
2015
- 2015-05-05 EP EP15723087.1A patent/EP3148462B1/en not_active Not-in-force
- 2015-05-05 WO PCT/US2015/029214 patent/WO2015183485A1/en active Application Filing
- 2015-05-05 CA CA2950706A patent/CA2950706A1/en not_active Abandoned
- 2015-05-05 AU AU2015267531A patent/AU2015267531B2/en not_active Ceased
- 2015-05-05 US US14/704,658 patent/US9603646B2/en active Active
- 2015-05-05 CN CN201580028909.0A patent/CN106470628B/zh not_active Expired - Fee Related
- 2015-05-05 JP JP2017515675A patent/JP6571174B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CA2950706A1 (en) | 2015-12-03 |
| US9603646B2 (en) | 2017-03-28 |
| JP2017520359A (ja) | 2017-07-27 |
| AU2015267531A1 (en) | 2016-12-08 |
| AU2015267531B2 (en) | 2020-02-27 |
| CN106470628B (zh) | 2019-08-27 |
| EP3148462A1 (en) | 2017-04-05 |
| EP3148462B1 (en) | 2018-04-18 |
| CN106470628A (zh) | 2017-03-01 |
| US20150342657A1 (en) | 2015-12-03 |
| WO2015183485A1 (en) | 2015-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6571174B2 (ja) | 骨固定アセンブリ | |
| JP6193128B2 (ja) | 骨固定アセンブリ | |
| JP6169680B2 (ja) | 骨固定部材システム及び使用方法 | |
| US10327772B2 (en) | Center cinch and release of buttress material | |
| US8500739B2 (en) | Securing device to secure fixation devices to bone portions | |
| US9539023B2 (en) | Circumcision tool | |
| JP2010069310A (ja) | 切断部材構造を備えた外科用ステープリング器具 | |
| JP7184548B2 (ja) | 外科用縫合糸通し装置のための縫合糸マガジン | |
| US11707282B2 (en) | Multi-piece ligation clip | |
| CA3068009C (en) | Wire passer system and method | |
| JP2016067933A (ja) | 推進力を生成するデバイス及びその釘打ち機 | |
| MXPA06004250A (en) | Force limiting mechanism for medical instrument |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180502 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180502 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190723 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190807 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6571174 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |