JP6432876B2 - 昇降装置とスタッカークレーン及び昇降台の高さ保持方法 - Google Patents
昇降装置とスタッカークレーン及び昇降台の高さ保持方法 Download PDFInfo
- Publication number
- JP6432876B2 JP6432876B2 JP2014163670A JP2014163670A JP6432876B2 JP 6432876 B2 JP6432876 B2 JP 6432876B2 JP 2014163670 A JP2014163670 A JP 2014163670A JP 2014163670 A JP2014163670 A JP 2014163670A JP 6432876 B2 JP6432876 B2 JP 6432876B2
- Authority
- JP
- Japan
- Prior art keywords
- lifting platform
- lifting
- servo motor
- height
- platform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 10
- 230000003028 elevating effect Effects 0.000 claims description 4
- 230000000694 effects Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images


Landscapes
- Warehouses Or Storage Devices (AREA)
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Control And Safety Of Cranes (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Forklifts And Lifting Vehicles (AREA)
Description
昇降台の昇降を停止させて高さを保持する際に、昇降台の停止後にサーボモータにより昇降台を所定高さだけ下降させるようにサーボモータを制御する、制御部を備えていることを特徴とする。
昇降台の昇降を停止させて高さを保持する際に、昇降台の停止後に、サーボモータにより昇降台を所定高さだけ下降させることを特徴とする。
・ 昇降台を上昇させて停止させたときでも、下降させて停止させたときでも、昇降台の高さの保持に必要なトルクは、停止の直前に昇降台は上昇していたか下降していたかで変化する。
・ 停止直前に昇降台が上昇していた場合、停止後にサーボモータのトルクが増加し、その後も高い値に保たれる。
・ 昇降台はサーボモータにより昇降するので、上昇して停止する場合でも、停止直前にオーバーシュートした後に下降することもある。また下降して停止する場合でも、停止直前にオーバーシュートした後に上昇することもある。
・ 停止直前に下降していた場合に保持トルクが小さくなることは、機構部から昇降台の下降に抵抗する力が加わり、停止後もこの力が保持されていることを示唆する。また停止直前に上昇していた場合に保持トルクが大きくなることは、機構部から昇降台の上昇に抵抗する力が加わり、停止後もこの力が保持されていることを示唆する。
・ 昇降台の停止後に、僅かな高さだけサーボモータにより下降させると、下降する高さが微小で、かつ昇降台の下降速度は僅かなので、昇降台がアンダーシュートすることはなく、昇降台は下降しながら停止する。
1) カウンターウェイトも電磁ブレーキ等のブレーキも不要で、スタッカークレーン2を軽量かつ小型にできる。
2) 昇降用のサーボモータの過負荷エラーを防止できる。
3) 昇降台が必ず下降しながら停止するように制御することは難しいが、停止した後にサーボモータの出力トルクを監視することは容易である。
4) 停止後に出力トルクが増加した場合のみ下降させればよいので、サイクルタイムへの影響が小さい。
4 台車
5 走行車輪
6 マスト
7 連結部
8 昇降台
9 移載装置
10 チェーン
12 スプロケット
14 サーボモータ
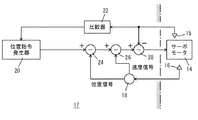
15 トルクセンサ
16 エンコーダ
17 制御部
18 差分器
20 位置指令発生器
22 比較器
24 速度指令発生器
26 電流指令発生器
28 サーボアンプ
W 荷物
Claims (6)
- 昇降台を昇降させる機構部と、機構部を駆動することによって昇降台を昇降させるサーボモータ、とを備えている昇降装置であって、
昇降台の昇降を停止させて高さを保持する際に、昇降台の停止後にサーボモータのトルクを監視し、サーボモータのトルクが所定の閾値以上になると、昇降台の停止後にサーボモータにより昇降台を所定高さだけ下降させるようにサーボモータを制御する、制御部を備えていることを特徴とする、昇降装置。 - 機構部は、昇降台のカウンターウェイトも、機構部を固定するブレーキも備えず、サーボモータのトルクのみによって、昇降台の高さを保持するように構成されていることを特徴とする、請求項1の昇降装置。
- 台車と、台車から上方へ起立するマストと、請求項1,2のいずれかの昇降装置とを備え、
前記機構部はマストに収納され、昇降台はマストにそって昇降するように構成されていることを特徴とする、スタッカークレーン。 - 前記機構部は、マストの下部と上部とに取り付けられている上下の歯車と、上下の歯車に巻き掛けられているエンドレスの駆動媒体とを備え、
サーボモータは、上下いずれかの歯車に接続されて、サーボモータからのトルクにより歯車を固定するように構成されていることを特徴とする、請求項3のスタッカークレーン。 - 昇降台を昇降させる機構部と、機構部を駆動することによって昇降台を昇降させるサーボモータと、サーボモータを制御する制御部、とを備えている昇降装置での、昇降台の高さ保持方法であって、
昇降台の昇降を停止させて高さを保持する際に、昇降台の停止後に制御部によりサーボモータのトルクを監視し、サーボモータのトルクが所定の閾値以上になると、昇降台の停止後に、サーボモータにより昇降台を所定高さだけ下降させることを特徴とする、昇降台の高さ保持方法。 - 前記昇降装置と、台車と、台車から上方へ起立するマストとを備え、前記機構部がマストに収納されて、昇降台はマストにそって昇降する、スタッカークレーンでの、昇降台の高さ保持方法であることを特徴とする、請求項5の昇降台の高さ保持方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014163670A JP6432876B2 (ja) | 2014-08-11 | 2014-08-11 | 昇降装置とスタッカークレーン及び昇降台の高さ保持方法 |
| CN201510315613.9A CN105366586A (zh) | 2014-08-11 | 2015-06-10 | 升降装置、堆垛起重机以及升降台的高度保持方法 |
| KR1020150099104A KR20160019356A (ko) | 2014-08-11 | 2015-07-13 | 승강 장치와 스태커 크레인 및 승강대의 높이 유지 방법 |
| TW104125953A TW201615533A (zh) | 2014-08-11 | 2015-08-10 | 升降裝置與堆高式起重機及升降台之高度保持方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014163670A JP6432876B2 (ja) | 2014-08-11 | 2014-08-11 | 昇降装置とスタッカークレーン及び昇降台の高さ保持方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016037386A JP2016037386A (ja) | 2016-03-22 |
| JP6432876B2 true JP6432876B2 (ja) | 2018-12-05 |
Family
ID=55369311
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014163670A Active JP6432876B2 (ja) | 2014-08-11 | 2014-08-11 | 昇降装置とスタッカークレーン及び昇降台の高さ保持方法 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6432876B2 (ja) |
| KR (1) | KR20160019356A (ja) |
| CN (1) | CN105366586A (ja) |
| TW (1) | TW201615533A (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101910472B1 (ko) | 2016-12-01 | 2018-10-22 | 한전케이피에스 주식회사 | 전동스태커의 포크부 상승 제한장치 |
| JP7444051B2 (ja) * | 2020-12-25 | 2024-03-06 | 株式会社ダイフク | 監視システム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0761520A (ja) * | 1993-08-26 | 1995-03-07 | Mazda Motor Corp | 物品搬送制御装置 |
| JP2002192385A (ja) * | 2000-12-28 | 2002-07-10 | Unisia Jecs Corp | 電動式押圧装置 |
| JP2002283532A (ja) * | 2001-03-28 | 2002-10-03 | Dainippon Printing Co Ltd | 軸なし版胴交換装置 |
| JP2002362710A (ja) * | 2001-06-04 | 2002-12-18 | Murata Mach Ltd | 走行台車 |
| JP4329027B2 (ja) * | 2004-02-20 | 2009-09-09 | 株式会社ダイフク | 昇降式の物品移載装置 |
| JP2008063068A (ja) * | 2006-09-06 | 2008-03-21 | Ihi Corp | スタッカークレーン |
| JP4962535B2 (ja) | 2009-06-29 | 2012-06-27 | 村田機械株式会社 | 昇降装置 |
| KR101553569B1 (ko) * | 2011-04-20 | 2015-09-17 | 무라다기카이가부시끼가이샤 | 주행차 |
| JP6666651B2 (ja) * | 2014-10-27 | 2020-03-18 | ハンファ精密機械株式会社 | 表面実装機の部品実装ヘッド |
| JP2017041490A (ja) * | 2015-08-18 | 2017-02-23 | 株式会社テックインテック | 搬送装置および制御方法 |
-
2014
- 2014-08-11 JP JP2014163670A patent/JP6432876B2/ja active Active
-
2015
- 2015-06-10 CN CN201510315613.9A patent/CN105366586A/zh active Pending
- 2015-07-13 KR KR1020150099104A patent/KR20160019356A/ko unknown
- 2015-08-10 TW TW104125953A patent/TW201615533A/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016037386A (ja) | 2016-03-22 |
| KR20160019356A (ko) | 2016-02-19 |
| TW201615533A (zh) | 2016-05-01 |
| CN105366586A (zh) | 2016-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20120168397A1 (en) | Hoist apparatus and control method thereof | |
| JP2009011182A (ja) | 葉たばこ乾葉の取卸し装置 | |
| KR102054177B1 (ko) | 갠트리 크레인 | |
| JP2013193484A (ja) | 搬送台車 | |
| JP6432876B2 (ja) | 昇降装置とスタッカークレーン及び昇降台の高さ保持方法 | |
| JP6233409B2 (ja) | エレベータ装置 | |
| JP2008230841A (ja) | 物品搬送装置 | |
| JP2007119136A (ja) | 物品移載装置及びその物品移載装置を装備した物品搬送装置 | |
| KR101862970B1 (ko) | 엘리베이터 장치 | |
| CN108602658B (zh) | 升降方法、升降装置及升降系统 | |
| JP2011225167A (ja) | エレベータ制御ケーブル運搬台車 | |
| JP5196221B2 (ja) | 自動倉庫設備 | |
| JP6440572B2 (ja) | エレベータ式駐車装置とその制御方法 | |
| JP4260048B2 (ja) | 機械式駐車装置 | |
| JP2013087571A (ja) | 昇降機の停止調整装置とそれを備えた機械式駐車設備 | |
| JP2007099424A (ja) | 物品搬送装置 | |
| JP4419517B2 (ja) | 昇降機械駆動用電動機の制御方法 | |
| JP7319050B2 (ja) | 機械式駐車装置 | |
| JP2014218357A (ja) | 昇降装置 | |
| TW201813898A (zh) | 移載裝置 | |
| JP2014043747A (ja) | 昇降体着床検知制御装置とそれを備えた機械式駐車設備 | |
| JP4329027B2 (ja) | 昇降式の物品移載装置 | |
| JP2019203290A (ja) | エレベータ式駐車装置とその制御方法 | |
| JP2015003810A (ja) | 乗客コンベアの荷物運搬装置 | |
| JP2007261731A (ja) | ワーク移動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180314 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180409 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181015 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6432876 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181028 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |