JP6249003B2 - ハイブリッド車両の制御装置 - Google Patents
ハイブリッド車両の制御装置 Download PDFInfo
- Publication number
- JP6249003B2 JP6249003B2 JP2015194893A JP2015194893A JP6249003B2 JP 6249003 B2 JP6249003 B2 JP 6249003B2 JP 2015194893 A JP2015194893 A JP 2015194893A JP 2015194893 A JP2015194893 A JP 2015194893A JP 6249003 B2 JP6249003 B2 JP 6249003B2
- Authority
- JP
- Japan
- Prior art keywords
- section
- link
- downhill
- vehicle
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/12—Controlling the power contribution of each of the prime movers to meet required power demand using control strategies taking into account route information
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/15—Preventing overcharging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
- B60W30/18127—Regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/15—Road slope, i.e. the inclination of a road segment in the longitudinal direction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/20—Road profile, i.e. the change in elevation or curvature of a plurality of continuous road segments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/25—Road altitude
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/40—Altitude
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/24—Energy storage means
- B60W2710/242—Energy storage means for electrical energy
- B60W2710/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/103—Speed profile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2754/00—Output or target parameters relating to objects
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/93—Conjoint control of different elements
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/947—Characterized by control of braking, e.g. blending of regeneration, friction braking
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Power Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Human Computer Interaction (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Navigation (AREA)
- Hybrid Electric Vehicles (AREA)
Description
車両の駆動源としての内燃機関及び同駆動源としての電動機、並びに、前記電動機に電力を供給する蓄電池を搭載し、
前記電動機を用いて回生制動を行うとともに同回生制動により発生した電力を前記蓄電池に充電可能であり且つ前記内燃機関の出力を用いて発電した電力を前記蓄電池に充電可能に構成されたハイブリッド車両に適用される。
前記車両に要求される要求駆動力を満たすように且つ前記蓄電池の残容量が所定の目標残容量に近づくように前記内燃機関及び前記電動機を制御する制御部を備える。
前記制御部は、
対象下り坂区間抽出部と下り坂制御部とを備える。
前記車両の走行予定経路を取得し、前記走行予定経路に含まれる下り坂区間であって同下り坂区間の開始地点と終了地点との標高差の絶対値が所定の標高差閾値よりも大きい下り坂区間を対象下り坂区間として抽出する。
前記対象下り坂区間が抽出された場合、前記対象下り坂区間の開始地点よりも所定距離だけ手前にある下り坂制御開始地点から同対象下り坂区間の終了地点までの区間のうちの少なくとも同下り坂制御開始地点から同対象下り坂区間の開始地点までの区間を含む特定区間を前記車両が走行するとき前記目標残容量を同車両が同特定区間以外を走行する場合に比べて小さい残容量に変更する下り坂制御を実行する。
前記車両が前記下り坂区間を走行するときの推定平均速度が第1速度であると推定される場合には同推定平均速度が同第1速度よりも低い第2速度であると推定される場合よりも前記標高差閾値を大きい値に設定する標高差閾値設定部を備える。
連続する道路区間の総てが高速道路及び高速道路以外の道路のうちの何れか一方のみの道路種別を有する道路区間からなる下り坂区間の中から前記対象下り坂区間を抽出するように構成され、
前記標高差閾値設定部は、
前記下り坂区間の道路種別が前記高速道路であるとき前記推定平均速度が前記第1速度であると推定し、前記下り坂区間の道路種別が前記高速道路以外の道路であるとき前記推定平均速度が前記第2速度であると推定するように構成される。
前記下り坂区間を前記車両又は前記車両以外の車両が過去に走行した際の平均速度に応じた値に基づいて前記推定平均速度を推定するように構成される。
<第1実施形態>
本発明の第1実施形態に係るハイブリッド車両の制御装置(以下、「第1制御装置」とも称呼される。)は、図1に示したように、車両10に適用される。車両10は、第1電動機21、第2電動機22及び機関23を搭載している。即ち、車両10はハイブリッド車両である。
Nm1=Nr−(Nr−NE)×(1+ρ1)/ρ1 ・・・(1)
Nm2=Nr×(1+ρ2)/ρ2−Nr ・・・(2)
GPS受信部62は、GPS(Global Positioning System)衛星(不図示)からの信号(電波)に基づいて車両10の現在位置Pnを取得し、現在位置Pnを表す信号を演算部61に対して出力する。
次に、ECU40の作動について説明する。
ECU40は、アクセル操作量Ap及び車速Vsに基づいてリングギアに作用するトルク(リングギア発生トルク)Trの目標値であるリングギア要求トルクTr*を決定する。リングギア発生トルクTrは、駆動輪27に作用するトルクと比例関係にあるので、リングギア発生トルクTrが大きくなるほど駆動輪27に作用するトルクは大きくなる。
運転者は、制動力を車両10に対して要求するとき、アクセル操作量Ap及びブレーキ操作量Bpを共に「0」に設定する操作又はアクセル操作量Apを「0」に設定した上でブレーキ操作量Bpを増加させる操作を行う。ECU40は、制動力が要求されたとき、回生制動力及び摩擦制動力を発生させる。このとき、回生制動力では不足する制動力が摩擦制動力によって補われる。
車両10が下り坂区間を走行するとき、車両10が制動力を発生させなければ駆動輪27にトルクを発生させなくても車速Vsが上昇する。車速Vsが運転者が期待した速度よりも高くなると、運転者は制動力を要求する。要求された制動力の一部又は全部は回生制動力によって提供される。そのため、下り坂区間の走行中、第1電動機21及び/又は第2電動機22が発電する頻度が上昇し、以て、残容量SOCが上昇する。換言すれば、ECU40は、車両10の位置エネルギーを運動エネルギーを介して電気エネルギーに変換する。
(a1)一般道路のみによって構成される区間である。
(b1)開始リンク及び終了リンクが下り勾配リンク(即ち、勾配閾値degth1よりも勾配が急な下り坂区間)である。
(c)開始地点と終了地点との間の距離が距離閾値Dthよりも長い。
(d1)終了地点の標高が開始地点の標高よりも低く、その標高差が標高差閾値Hth1よりも大きい(但し、Hth1>0)。
(e)被判定区間に含まれる連続した平坦リンク区間の距離が平坦距離閾値Fthよりも短い(ただし、Fth<Dth)。
(a2)高速道路のみによって構成される区間である。
(b2)開始リンク及び終了リンクが下り勾配リンク(即ち、勾配閾値degth2よりも勾配が急な下り坂区間)である。
(c)開始地点と終了地点との間の距離が距離閾値Dthよりも長い。
(d2)終了地点の標高が開始地点の標高よりも低く、その標高差が標高差閾値Hth2よりも大きい(ただし、Hth2>Hth1)。
(e)被判定区間に含まれる連続した平坦リンク区間の距離が平坦距離閾値Fthよりも短い。
このように対象下り坂区間が抽出され、その抽出された対象下り坂区間に対して下り坂制御が実行される。
演算部61は、現在位置Pnから目的地までの経路(即ち、走行予定経路)に含まれる対象下り坂区間を上述した一般道路対象下り坂条件及び高速道路対象下り坂条件に従って探索する。対象下り坂区間が見つかった場合、車両10が下り坂制御区間(プレユース区間の開始地点)の開始地点に達したとき、演算部61はECU40へ下り坂制御の開始すべき旨の通知を送信する。ECU40は、この演算部61からの通知に従って下り坂制御を開始する。
次に、ECU40の具体的作動について説明する。
<ECUによる駆動力制御>
第1制御装置は、上述したように、下り坂制御において目標残容量SOC*を変更する。そこで、先ず、目標残容量SOC*の変更により、機関23、第1電動機21及び第2電動機22の運転がどのように変更されるかについて、駆動力制御ルーチンを用いて説明する。
機関要求出力Pe*が出力閾値Pethより大きい場合、CPUはステップ620にて「Yes」と判定してステップ625に進み、現時点において機関23が停止中であるか否かを判定する。機関23が停止中であると、CPUはステップ625にて「Yes」と判定してステップ630に進み、機関23の運転を開始する処理を実行する。次いで、CPUはステップ635に進む。これに対し、機関23が運転中であると、CPUはステップ625にて「No」と判定してステップ635に直接進む。
ステップ655:CPUは、第1電動機21が発生させるトルクTm1が目標MG1トルクTm1*と等しくなるように第1インバータ33を制御する。
ステップ660:CPUは、第2電動機22が発生させるトルクTm2が目標MG2トルクTm2*と等しくなるように第2インバータ34を制御する。
機関要求出力Pe*が出力閾値Peth以下である場合、CPUがステップ620に進んだとき、CPUはそのステップ620にて「No」と判定してステップ665に進み、現時点において機関23が運転中であるか否かを判定する。
以上のように、機関23、第1電動機21及び第2電動機22が制御される。
次に、運行支援装置60の具体的作動について説明する。
演算部61のCPU66は、運転者が目的地を入力したとき及び既に探索された対象下り坂区間の終了地点を車両10が通過したとき、図9にフローチャートにより表された「制御区間設定処理ルーチン」を実行する。
この場合について、図4(B)に示された例を参照しながら説明する。この場合、CPU66は、ステップ1003の処理の後、ステップ1005に進み、候補区間開始リンクLstaの値が「0」であるか又は候補区間道路種別Rtがi番目のリンクの道路種別Rt(i)と等しいか否かを判定する。
次に、この場合について、図4(A)に示された例を参照しながら説明する。この場合、CPU66がステップ1020を9回目(即ち、変数iの値が「9」であるとき)に実行するとき、CPU66はステップ1020にて「Yes」と判定してステップ1025に進み、更に、ステップ1035に進む。
次に、この場合について、図4(C)に示された例を参照しながら説明する。この場合、リンクc1は下り勾配リンクであるので、CPU66がステップ1020を1回目に実行するとき、CPU66は、ステップ1020及びステップ1025のそれぞれにて「Yes」と判定し、ステップ1030に進んで候補区間開始リンクLstaの値を「1」に設定する。更に、CPU66は、候補区間合計距離Dsumの値を「0」に設定し、候補区間合計標高差Hsumの値を「0」に設定し、候補区間道路種別Rtの値を道路種別Rt(1)(この場合、一般道路を表す「1」)に設定する。
この場合について、図5(A)に示された例を参照しながら説明する。この場合、CPU66は、ステップ1003の処理の後、ステップ1005に進んだとき、候補区間開始リンクLstaの値が「0」であるので、ステップ1005にて「Yes」と判定してステップ1010に進む。
この場合について、図5(B)に示された例を参照しながら説明する。本ルーチンの実行中、精査リンクがリンクe3であるとき、候補区間開始リンクLstaの値が「3」に設定される。
この場合について、図5(C)に示された例を参照しながら説明する。本ルーチンの実行中、精査リンクがリンクf3であるとき、候補区間開始リンクLstaの値が「3」に設定される。次いで、精査リンクがf5であるとき、平坦区間開始リンクFstaの値が「5」に設定される。
CPU66は、下り坂制御を実行するため図11にフローチャートにより表された「下り坂制御実行処理ルーチン」を所定の時間が経過する毎に実行する。従って、適当なタイミングとなると、CPU66は、図11のステップ1100から処理を開始してステップ1105に進み、下り坂制御区間の開始地点Ps及び終了地点Peの少なくとも一方が設定されているか否かを判定する。
車両の駆動源としての内燃機関(23)及び同駆動源としての電動機(第1電動機21及び第2電動機22)、並びに、前記電動機に電力を供給する蓄電池(31)を搭載し、前記電動機を用いて回生制動を行うとともに同回生制動により発生した電力を前記蓄電池に充電可能であり且つ前記内燃機関の出力を用いて発電した電力を前記蓄電池に充電可能に構成されたハイブリッド車両(10)に適用され、
前記車両に要求される要求駆動力(リングギア要求トルクTr*)を満たすように且つ前記蓄電池の残容量(SOC)が所定の目標残容量(SOC*)に近づくように前記内燃機関及び前記電動機を制御する制御部を備えるハイブリッド車両の制御装置であって、
前記制御部は、
前記車両の走行予定経路を取得し、前記走行予定経路に含まれる下り坂区間であって同下り坂区間の開始地点と終了地点との標高差の絶対値が所定の標高差閾値(標高差閾値Hth1及び標高差閾値Hth2)よりも大きい下り坂区間を対象下り坂区間として抽出する(図9のステップ915及び図10)対象下り坂区間抽出部と、
前記対象下り坂区間が抽出された場合、前記対象下り坂区間の開始地点よりも所定距離だけ手前にある下り坂制御開始地点から同対象下り坂区間の終了地点までの区間のうちの少なくとも同下り坂制御開始地点から同対象下り坂区間の開始地点までの区間を含む特定区間を前記車両が走行するとき前記目標残容量を同車両が同特定区間以外を走行する場合に比べて小さい残容量(低側残容量Sd)に変更する下り坂制御を実行する(図11)下り坂制御部と、
を含み、
前記対象下り坂区間抽出部は、
前記車両が前記下り坂区間を走行するときの推定平均速度が第1速度であると推定される場合には同推定平均速度が同第1速度よりも低い第2速度であると推定される場合よりも前記標高差閾値を大きい値(標高差閾値Hth2)に設定する(図10のステップ1010乃至ステップ1015)標高差閾値設定部を備えている。
連続する道路区間の総てが高速道路及び高速道路以外の道路のうちの何れか一方のみの道路種別を有する道路区間からなる下り坂区間の中から前記対象下り坂区間を抽出するように構成され(上記条件(a1)及び(a2))、
前記下り坂区間の道路種別が前記高速道路であるとき前記推定平均速度が前記第1速度であると推定し、前記下り坂区間の道路種別が前記高速道路以外の道路であるとき前記推定平均速度が前記第2速度であると推定する(図10のステップ1010乃至ステップ1015)ように構成されている。
次に、本発明の第2実施形態に係るハイブリッド車両の制御装置(以下、「第2制御装置」とも称呼される。)について説明する。第1制御装置は、走行予定経路を構成するリンクの道路種別(一般道路及び高速道路のいずれか)に基づいて対象下り坂区間を抽出していた。これに対し、第2制御装置は、被判定区間を構成するリンクのそれぞれを車両10が走行するときの推定車速Veに基づいて対象下り坂区間を抽出する点のみにおいて第1制御装置と相違する。従って、以下、この相違点を中心に説明する。
(a3)低速区間のみによって構成される区間である。
(b1)開始リンク及び終了リンクが下り勾配リンク(即ち、勾配閾値degth1よりも勾配が急な下り坂区間)である。
(c)開始地点と終了地点との間の距離が距離閾値Dthよりも長い。
(d1)終了地点の標高が開始地点の標高よりも低く、その標高差が標高差閾値Hth1よりも大きい。
(e)被判定区間に含まれる連続した平坦リンク区間の距離が平坦距離閾値Fthよりも短い。
(a4)高速区間のみによって構成される区間である。
(b2)開始リンク及び終了リンクが下り勾配リンク(即ち、勾配閾値degth2よりも勾配が急な下り坂区間)である。
(c)開始地点と終了地点との間の距離が距離閾値Dthよりも長い。
(d2)終了地点の標高が開始地点の標高よりも低く、その標高差が標高差閾値Hth2よりも大きい(ただし、Hth2>Hth1)。
(e)被判定区間に含まれる連続した平坦リンク区間の距離が平坦距離閾値Fthよりも短い。
演算部61は、推定車速Veの学習を行うことにより、推定車速Veの精度を向上する。即ち、車両10の走行中、演算部61は、地図データベースに現在位置Pnを適用することによって車両10が走行しているリンクを特定する。演算部61は、車両10があるリンクを走行したとき、そのリンクの開始地点から終了地点までの距離と、車両10が実際に開始地点から終了地点まで走行するのに要した時間と、に基づいて平均車速Vaを算出する。
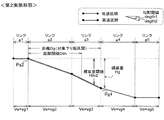
本実施形態における対象下り坂区間の例が図12に示される。図12は、5個のリンク(リンクg1〜リンクg5)によって構成される車両10の走行予定経路を示している。リンクg1〜リンクg5のそれぞれの推定車速Veは、それぞれ車速vg1〜車速vg5である。
演算部61のCPU66は、図9にフローチャートにより表された「制御区間設定処理ルーチン」を実行し、ステップ910の処理に進んだとき、図13にフローチャートにより表された「対象下り坂探索処理ルーチン」を実行する。図13のフローチャートに示されたステップであって図10のフローチャートに示されたステップと同様の処理が実行されるステップには図10と同一のステップ符号が付されている。
前記下り坂区間を前記車両(10)又は前記車両以外の車両が過去に走行した際の平均速度(Va)に応じた値に基づいて前記推定平均速度(推定車速Ve)を推定するように構成されている。
次に、本発明の第3実施形態に係るハイブリッド車両の制御装置(以下、「第3制御装置」とも称呼される。)について説明する。第2制御装置は、被判定区間を構成するリンクの推定車速Veが速度閾値Vthよりも低いか否か(即ち、リンクが低速区間であるか高速区間であるか否か)に応じて標高差閾値(標高差閾値Hth1及び標高差閾値Hth2のいずれか)を使い分けていた。これに対し、第3制御装置は、被判定区間を構成するリンクの推定車速Veに基づいて被判定区間の区間平均速度Vdを推定し、区間平均速度Vdに応じて標高差閾値Hthvを決定する点のみにおいて第2制御装置と相違する。従って、以下、この相違点を中心に説明する。
(b3)開始リンク及び終了リンクが下り勾配リンク(即ち、勾配閾値degth3よりも勾配が急な下り坂区間)である。
(c)開始地点と終了地点との間の距離が距離閾値Dthよりも長い。
(d3)終了地点の標高が開始地点の標高よりも低く、その標高差が標高差閾値Hthvよりも大きい。
(e)被判定区間に含まれる連続した平坦リンク区間の距離が平坦距離閾値Fthよりも短い。
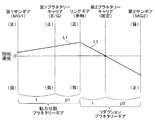
本実施形態における対象下り坂区間の例が図15に示される。図15は、5個のリンク(リンクh1〜リンクh5)によって構成される車両10の走行予定経路を示している。リンクh2〜リンクh4のそれぞれの推定車速Veは、それぞれ車速vh2〜車速vh4である。リンクh2〜リンクh4は下り勾配リンクであり、リンクh1及びリンクh5は平坦リンクである。
vd3=(Dh2+Dh3)/(Sh2+Sh3)
=(Dh2+Dh3)/(Dh2/vh2+Dh3/vh3) ・・・(3)
演算部61のCPU66は、図9にフローチャートにより表された「制御区間設定処理ルーチン」を実行し、ステップ910の処理に進んだとき、図16にフローチャートにより表された「対象下り坂探索処理ルーチン」を実行する。図16のフローチャートに示されたステップであって図10のフローチャートに示されたステップと同様の処理が実行されるステップには図10と同一のステップ符号が付されている。
ステップ1637:CPU66は、候補区間走行時間Tsumの値に精査リンク走行時間t(i)を加える。
ステップ1639:CPU66は、区間平均速度Vdを図14に示されるマップに適用することによって標高差閾値Hthvを取得する。
Claims (3)
- 車両の駆動源としての内燃機関及び同駆動源としての電動機、並びに、前記電動機に電力を供給する蓄電池を搭載し、前記電動機を用いて回生制動を行うとともに同回生制動により発生した電力を前記蓄電池に充電可能であり且つ前記内燃機関の出力を用いて発電した電力を前記蓄電池に充電可能に構成されたハイブリッド車両に適用され、
前記車両に要求される要求駆動力を満たすように且つ前記蓄電池の残容量が所定の目標残容量に近づくように前記内燃機関及び前記電動機を制御する制御部を備えるハイブリッド車両の制御装置であって、
前記制御部は、
前記車両の走行予定経路を取得し、前記走行予定経路に含まれる下り坂区間であって同下り坂区間の開始地点と終了地点との標高差の絶対値が所定の標高差閾値よりも大きい下り坂区間を対象下り坂区間として抽出する対象下り坂区間抽出部と、
前記対象下り坂区間が抽出された場合、前記対象下り坂区間の開始地点よりも所定距離だけ手前にある下り坂制御開始地点から同対象下り坂区間の終了地点までの区間のうちの少なくとも同下り坂制御開始地点から同対象下り坂区間の開始地点までの区間を含む特定区間を前記車両が走行するとき前記目標残容量を同車両が同特定区間以外を走行する場合に比べて小さい残容量に変更する下り坂制御を実行する下り坂制御部と、
を含み、
前記対象下り坂区間抽出部は、
前記車両が前記下り坂区間を走行するときの推定平均速度が第1速度であると推定される場合には同推定平均速度が同第1速度よりも低い第2速度であると推定される場合よりも前記標高差閾値を大きい値に設定する標高差閾値設定部を備える、
制御装置。 - 請求項1に記載のハイブリッド車両の制御装置において、
前記対象下り坂区間抽出部は、
連続する道路区間の総てが高速道路及び高速道路以外の道路のうちの何れか一方のみの道路種別を有する道路区間からなる下り坂区間の中から前記対象下り坂区間を抽出するように構成され、
前記標高差閾値設定部は、
前記下り坂区間の道路種別が前記高速道路であるとき前記推定平均速度が前記第1速度であると推定し、前記下り坂区間の道路種別が前記高速道路以外の道路であるとき前記推定平均速度が前記第2速度であると推定するように構成された、
制御装置。 - 請求項1に記載のハイブリッド車両の制御装置において、
前記標高差閾値設定部は、
前記下り坂区間を前記車両又は前記車両以外の車両が過去に走行した際の平均速度に応じた値に基づいて前記推定平均速度を推定するように構成された制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015194893A JP6249003B2 (ja) | 2015-09-30 | 2015-09-30 | ハイブリッド車両の制御装置 |
| US15/244,411 US9758153B2 (en) | 2015-09-30 | 2016-08-23 | Hybrid vehicle control apparatus |
| EP16188255.0A EP3153365B1 (en) | 2015-09-30 | 2016-09-12 | Hybrid vehicle control apparatus and hybrid vehicle including the control apparatus |
| CN201610860601.9A CN107031611B (zh) | 2015-09-30 | 2016-09-28 | 混合动力车辆的控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015194893A JP6249003B2 (ja) | 2015-09-30 | 2015-09-30 | ハイブリッド車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017065566A JP2017065566A (ja) | 2017-04-06 |
| JP6249003B2 true JP6249003B2 (ja) | 2017-12-20 |
Family
ID=56936298
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015194893A Active JP6249003B2 (ja) | 2015-09-30 | 2015-09-30 | ハイブリッド車両の制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9758153B2 (ja) |
| EP (1) | EP3153365B1 (ja) |
| JP (1) | JP6249003B2 (ja) |
| CN (1) | CN107031611B (ja) |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6319053B2 (ja) * | 2014-11-06 | 2018-05-09 | トヨタ自動車株式会社 | モーターによって駆動する車両、および、車両に搭載される二次電池の充放電の制御方法 |
| JP6330745B2 (ja) | 2015-07-22 | 2018-05-30 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6369411B2 (ja) | 2015-07-22 | 2018-08-08 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6269607B2 (ja) | 2015-07-22 | 2018-01-31 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6347235B2 (ja) * | 2015-07-30 | 2018-06-27 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6304165B2 (ja) | 2015-07-31 | 2018-04-04 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6421742B2 (ja) * | 2015-11-27 | 2018-11-14 | 株式会社デンソー | 車両制御装置 |
| JP6651379B2 (ja) * | 2016-02-23 | 2020-02-19 | 本田技研工業株式会社 | 内燃機関の制御装置 |
| US10843680B2 (en) * | 2016-06-07 | 2020-11-24 | Lenovo (Singapore) Pte. Ltd. | Managing battery and engine power to propel vehicle based on upcoming road feature |
| JP6344429B2 (ja) * | 2016-06-09 | 2018-06-20 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| US10699305B2 (en) | 2016-11-21 | 2020-06-30 | Nio Usa, Inc. | Smart refill assistant for electric vehicles |
| JP6620126B2 (ja) * | 2017-06-16 | 2019-12-11 | 本田技研工業株式会社 | ハイブリッド車両 |
| CN109204022A (zh) * | 2017-07-05 | 2019-01-15 | 广元公正科技有限公司 | 配内燃机动力系统的无轨电车在高速公路上的用电系统 |
| JP6777027B2 (ja) * | 2017-07-07 | 2020-10-28 | トヨタ自動車株式会社 | 二次電池システム |
| US10837790B2 (en) | 2017-08-01 | 2020-11-17 | Nio Usa, Inc. | Productive and accident-free driving modes for a vehicle |
| US11192539B2 (en) * | 2017-10-04 | 2021-12-07 | Nissan Motor Co., Ltd. | Vehicle control method and control device |
| US10773597B2 (en) * | 2017-10-06 | 2020-09-15 | Ford Global Technologies, Llc | Autonomous vehicle acceleration profile |
| US20190107406A1 (en) * | 2017-10-09 | 2019-04-11 | Nio Usa, Inc. | Systems and methods for trip planning under uncertainty |
| US10635109B2 (en) | 2017-10-17 | 2020-04-28 | Nio Usa, Inc. | Vehicle path-planner monitor and controller |
| US10935978B2 (en) | 2017-10-30 | 2021-03-02 | Nio Usa, Inc. | Vehicle self-localization using particle filters and visual odometry |
| US10606274B2 (en) | 2017-10-30 | 2020-03-31 | Nio Usa, Inc. | Visual place recognition based self-localization for autonomous vehicles |
| SE1751528A1 (en) * | 2017-12-12 | 2019-06-13 | Scania Cv Ab | Method and system for propelling a vehicle |
| CN108146252A (zh) * | 2017-12-22 | 2018-06-12 | 南京越博电驱动系统有限公司 | 一种基于卫星信号的电动车辆能量回收系统 |
| FR3081406B1 (fr) * | 2018-05-24 | 2020-06-19 | Psa Automobiles Sa | Gestion de l’alimentation d’un reseau electrique d’un vehicule automobile hybride |
| JP7119941B2 (ja) * | 2018-11-22 | 2022-08-17 | トヨタ自動車株式会社 | 車両の制御システム |
| US11548494B2 (en) * | 2019-02-11 | 2023-01-10 | Ford Global Technologies, Llc | Lap learning for vehicle energy management optimization |
| KR102568112B1 (ko) * | 2019-07-31 | 2023-08-17 | 현대오토에버 주식회사 | Rdp 알고리즘 기반의 도로 구배정보 모델링 장치 및 방법 |
| US11027650B2 (en) | 2019-11-07 | 2021-06-08 | Nio Usa, Inc. | Method and apparatus for improving operation of a motor vehicle |
| CN111497821B (zh) * | 2020-04-08 | 2022-03-25 | 北京汽车股份有限公司 | 混动车辆的能量管理方法 |
| KR20210152209A (ko) * | 2020-06-08 | 2021-12-15 | 현대자동차주식회사 | 하이브리드 차량의 제어 장치 및 방법 |
| EP3936399B1 (en) * | 2020-07-10 | 2023-06-07 | Volvo Truck Corporation | A method for controlling a vehicle |
| CN114148177B (zh) * | 2020-09-04 | 2024-01-23 | 广汽埃安新能源汽车有限公司 | 一种充电截止点自动调整方法及装置 |
| SE546058C2 (en) | 2021-02-18 | 2024-04-30 | Scania Cv Ab | Method and control device for regenerative braking in a vehicle |
| CN113247001B (zh) * | 2021-06-01 | 2026-04-28 | 阿尔特汽车技术股份有限公司 | 一种插电式混合动力汽车中根据车速修正目标soc的方法 |
| US20240317209A1 (en) * | 2021-07-26 | 2024-09-26 | Nissan Motor Co., Ltd. | Method and device for regenerative control of hybrid vehicle |
| JP7247285B2 (ja) * | 2021-08-26 | 2023-03-28 | 本田技研工業株式会社 | 車両制御装置 |
| KR20230169739A (ko) * | 2022-06-09 | 2023-12-18 | 현대자동차주식회사 | 차량용 속도 제어 장치 및 방법 |
| KR20230169738A (ko) * | 2022-06-09 | 2023-12-18 | 현대자동차주식회사 | 차량용 속도 제어 장치 및 방법 |
| CN115923768A (zh) * | 2022-11-28 | 2023-04-07 | 成都赛力斯科技有限公司 | 一种基于坡度的增程器控制方法和系统 |
| IT202300007860A1 (it) * | 2023-04-21 | 2024-10-21 | Eproinn S R L | Metodo implementato mediante elaboratore per la gestione delle fonti di propulsione di un veicolo ibrido, al fine di massimizzare il recupero energetico di tale veicolo ibrido durante la sua marcia |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3336777B2 (ja) | 1994-10-25 | 2002-10-21 | 株式会社エクォス・リサーチ | ハイブリッド車両及びハイブリッド車両の制御方法 |
| DE10128758A1 (de) * | 2001-06-13 | 2002-12-19 | Bosch Gmbh Robert | Verfahren und Einrichtung zur Ansteuerung eines Hybridfahrzeugs |
| JP4100335B2 (ja) * | 2003-11-28 | 2008-06-11 | 株式会社エクォス・リサーチ | 駆動制御装置、及びハイブリッド車両 |
| JP4793335B2 (ja) | 2007-06-20 | 2011-10-12 | 株式会社デンソー | 充放電管理装置および充放電管理装置用のプログラム |
| US8290648B2 (en) | 2007-06-20 | 2012-10-16 | Denso Corporation | Charge-discharge management apparatus and computer readable medium comprising instructions for achieving the apparatus |
| US8244442B2 (en) * | 2009-02-17 | 2012-08-14 | Lockheed Martin Corporation | System and method for stability control of vehicle and trailer |
| JP4894909B2 (ja) | 2009-05-26 | 2012-03-14 | 株式会社デンソー | ハイブリッド車両の駆動制御装置 |
| JP5332907B2 (ja) | 2009-05-27 | 2013-11-06 | 日産自動車株式会社 | 電動車両のバッテリ充電制御装置 |
| US8543328B2 (en) * | 2011-01-11 | 2013-09-24 | Navteq B.V. | Method and system for calculating an energy efficient route |
| JP5429197B2 (ja) * | 2011-01-11 | 2014-02-26 | トヨタ自動車株式会社 | 車両制御装置 |
| US8862938B2 (en) * | 2011-04-18 | 2014-10-14 | General Electric Company | System, method, and apparatus for resolving errors in a system |
| JP5664769B2 (ja) * | 2011-04-22 | 2015-02-04 | トヨタ自動車株式会社 | 車両および車両用制御方法 |
| US9751424B2 (en) | 2011-07-14 | 2017-09-05 | Ford Global Technologies, Llc | Method and system for determining a target state of charge to charge a battery in a vehicle using external electric power |
| US8882634B2 (en) | 2012-05-04 | 2014-11-11 | Ford Global Technologies, Llc | Methods and systems for operating a vehicle driveline responsive to external conditions |
| CN104284823B (zh) * | 2012-05-08 | 2017-06-20 | 沃尔沃拉斯特瓦格纳公司 | 用于混合动力电动车辆的能量管理系统和燃料节约方法 |
| JP5999338B2 (ja) * | 2012-09-20 | 2016-09-28 | マツダ株式会社 | 車両用航続距離算出装置 |
| US9139188B2 (en) * | 2012-11-01 | 2015-09-22 | Caterpillar Inc. | Prediction control strategy for hybrid machinery |
| DE102013009279A1 (de) * | 2013-06-04 | 2014-12-04 | Daimler Ag | Verfahren und Vorrichtung zum Betrieb eines Hybridantriebsstrangs eines Fahrzeugs |
| JP5811148B2 (ja) | 2013-07-11 | 2015-11-11 | トヨタ自動車株式会社 | 回生発電機付車両 |
| JP6007929B2 (ja) * | 2014-02-24 | 2016-10-19 | トヨタ自動車株式会社 | 移動支援装置、移動支援方法、及び運転支援システム |
| US10176032B2 (en) * | 2014-12-01 | 2019-01-08 | Uptake Technologies, Inc. | Subsystem health score |
| CN104554251A (zh) * | 2014-12-09 | 2015-04-29 | 河南理工大学 | 基于道路坡度信息的混合动力汽车节能预测控制方法 |
| KR101655609B1 (ko) | 2014-12-11 | 2016-09-07 | 현대자동차주식회사 | 하이브리드 자동차의 배터리 충전 상태 제어 장치 및 방법 |
-
2015
- 2015-09-30 JP JP2015194893A patent/JP6249003B2/ja active Active
-
2016
- 2016-08-23 US US15/244,411 patent/US9758153B2/en not_active Expired - Fee Related
- 2016-09-12 EP EP16188255.0A patent/EP3153365B1/en active Active
- 2016-09-28 CN CN201610860601.9A patent/CN107031611B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP3153365B1 (en) | 2021-06-16 |
| CN107031611A (zh) | 2017-08-11 |
| US20170088117A1 (en) | 2017-03-30 |
| JP2017065566A (ja) | 2017-04-06 |
| EP3153365A1 (en) | 2017-04-12 |
| US9758153B2 (en) | 2017-09-12 |
| CN107031611B (zh) | 2019-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6249003B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6330745B2 (ja) | ハイブリッド車両の制御装置 | |
| US10124678B2 (en) | Hybrid vehicle control apparatus | |
| JP6369411B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6269641B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2017024571A (ja) | ハイブリッド車両の制御装置 | |
| CN101517361B (zh) | 车辆的显示装置和车辆的显示装置的控制方法 | |
| CN101516703B (zh) | 车辆的控制装置和车辆的控制方法 | |
| JP6571708B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2018079728A (ja) | ハイブリッド車両 | |
| JP2021020563A (ja) | 車両エネルギ管理システム及び車両エネルギ管理方法 | |
| US10562515B2 (en) | Method for determining optimal operating point for hybrid electric vehicle | |
| WO2013121541A1 (ja) | ハイブリッド車両の制御装置 | |
| JP2018024371A (ja) | ハイブリッド車両 | |
| CN110155035A (zh) | 混合动力汽车 | |
| JP2010012946A (ja) | 充電制御装置 | |
| JP6702102B2 (ja) | ハイブリッド車両 | |
| JP2018039408A (ja) | ハイブリッド車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170303 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171019 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171024 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171106 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6249003 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |