JP6039276B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP6039276B2 JP6039276B2 JP2012153692A JP2012153692A JP6039276B2 JP 6039276 B2 JP6039276 B2 JP 6039276B2 JP 2012153692 A JP2012153692 A JP 2012153692A JP 2012153692 A JP2012153692 A JP 2012153692A JP 6039276 B2 JP6039276 B2 JP 6039276B2
- Authority
- JP
- Japan
- Prior art keywords
- control unit
- data
- control means
- instruction
- sub master
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/12—Digital output to print unit, e.g. line printer, chain printer
- G06F3/1201—Dedicated interfaces to print systems
- G06F3/1202—Dedicated interfaces to print systems specifically adapted to achieve a particular effect
- G06F3/1211—Improving printing performance
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G21/00—Arrangements not provided for by groups G03G13/00 - G03G19/00, e.g. cleaning, elimination of residual charge
- G03G21/14—Electronic sequencing control
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- General Engineering & Computer Science (AREA)
- Control Or Security For Electrophotography (AREA)
- Information Transfer Systems (AREA)
- Facsimiles In General (AREA)
Description
特許文献1には、単一の伝送線において上り方向と下り方向で通信レートを変えることで、シリアル通信による伝送量を増加させる装置が記載されている。特許文献2には、シリアル伝送線に加え、増加するオプション装置に専用線を設けた装置が記載されている。
一方、画像形成動作の制御シーケンスを正常に実行するためには、ある情報を定期的に取得する必要がある。例えば、記録材の搬送を高精度に制御するためには、記録材の搬送状態を検知するセンサの出力結果を定期的に取得する必要がある。
ここで、この情報を定期的に取得するために、通信が成立したことを確認するための通信が遅延してしまうと、画像形成動作の制御を適切に実行できなくなる可能性がある。
前記第1制御手段は、前記第2制御手段に前記指示を送信し、前記第2制御手段から前記指示に対する返信を受信する。前記第2制御手段は、データを保持する保持手段と、処理手段とを有する。処理手段は、前記第1通信ラインを介して前記第1制御手段からの前記指示を受信すると前記第2通信ラインを用いて前記第1制御手段に前記返信を行う。また処理手段は、前記第1通信ラインを介して前記第1制御手段から特定のモードに設定するための指示を受信したときに、設定された周期に基づいて、前記保持手段に保持されているデータを、定期的に前記第2通信ラインを介して前記第1制御手段に送信する。
前記処理手段は、前記特定のモードにおいて、前記周期に基づいて前記保持手段が保持するデータを送信するタイミングを決定し、前記決定されたタイミングが、前記第1通信ラインを介して前記第1制御手段から前記指示を受信する第1状態及び前記第2通信ラインを介して前記第1制御手段に前記返信を行う第2状態であるかを判断し、前記第1状態及び前記第2状態のいずれでもない場合は前記保持手段に保持されているデータを送信し、前記第1状態または前記第2状態である場合は、前記保持手段に保持されているデータの送信のタイミングを遅延させて、前記返信と重ならないように前記保持手段に保持されているデータを送信することを特徴とする。
画像形成装置1000は、自動原稿搬送部(DF:Document Feeder)100、画像読取部200、画像形成部300、及び操作部10を備える。画像読取部200は、画像形成部300上に設けられる。画像読取部200上には、自動原稿搬送部100が取り付けられている。画像形成装置1000を構成するこれらの構成要素は、複数の制御部により分散制御される。各制御部には、CPUや専用の半導体装置等を用いることができる。
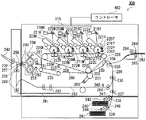
図2は、画像形成部300の詳細な構成図である。画像形成部300は、電子写真方式を採用している。図2において、符号末尾のアルファベットY、M、C、Kは、それぞれイエロー、マゼンダ、シアン、ブラックの各色を表す。なお、以下の説明で全色を表す場合には、符号末尾のアルファベットY、M、C、Kを省略して説明する。
サブマスタ制御部330は、CPU401、サブマスタ通信制御部404、RAM(Random Access Memory)402、及びROM403(Read Only Memory)を有する。CPU401は、画像形成装置1000の機能の一つである作像に関わる動作及びシーケンスの制御を行う。RAM402は、CPU401の一時記憶領域として用いられる。ROM403は、作像に関わる動作及びシーケンス制御を行うためのプログラムを格納する。サブマスタ通信制御部404は、シリアル通信バス380tx、380rxを介して、スレーブ制御部331と1対1のシリアル通信を行う。サブマスタ制御部330は、シリアル通信バス380txを介して、スレーブ制御部331により実行される処理を指示するコマンド、処理に必要なデータ等を含む送信データを送信する。スレーブ制御部331は、サブマスタ制御部330から受信したコマンドおよびデータに基づき、スレーブ制御部331に接続されている負荷を制御する。サブマスタ制御部330は、スレーブ制御部331の動作を制御することにより、スレーブ制御部331に接続されている負荷によって行われている作像に関する処理を統括的に制御する。
ドラムモータ制御部409は、感光体225Yを回転駆動するモータであるドラムモータ425の駆動部である。図示しないが、感光体225M、225C、225Kの制御に関わるスレーブ制御部も同様の構成である。各スレーブ制御部により、イエロー、マゼンタ、シアン、ブラックが個別制御される。
ローラ駆動制御部410は、転写ベルト226を所定速度で回転させるローラ227の駆動制御を行うために、ローラ227を回転駆動するローラ駆動モータ435を、制御する。
高圧生成制御部411は、昇圧コイル445を駆動するためのPWM(Pulse Width Modulation)信号を生成する。昇圧コイル445は、一次帯電のための電圧を生成する。一次帯電部221M、221C、221Kも同様に図示しない他のスレーブ制御部によって制御される。
これら一連の制御が、サブマスタ制御部330のCPU401により、シリアル通信バス380を介して行われる。なお、ポリゴンミラー駆動モータ415、ドラムモータ425、ローラ駆動モータ435、昇圧コイル445は、駆動部の一例である。
図5は、サブマスタ制御部330がスレーブ制御部331に送信するライトを指示する送信データ及びリードを指示する送信データのフレーム構成を例示する。ここで、サブマスタ制御部330のライト指示は、サブマスタ制御部330のレジスタへのデータの書き込み(ライト)を指示する。サブマスタ制御部330のリード指示は、サブマスタ制御部330のレジスタに記憶されているデータの読み出し(リード)を指示する。図5は、さらに、スレーブ制御部331がサブマスタ制御部330に送信する常時リードに関する送信データのフレーム構成を例示する。
サブマスタ制御部330がスレーブ制御部331に送信するリードを指示する送信データのフレームは、リードコマンド(rcmd)、上位アドレス(adrH)、下位アドレス(adrL)、ライト時のフレーム長と合わせるためのダミーデータ(dummy)、巡回冗長データの順(crc)で構成される。本実施例では、リードを指示する送信データの長さが、常時リードに関する送信データの長さより短くならないようにするために、リードを指示する送信データにダミーデータを追加している。これは、常時リードに関する送信データとack(肯定応答)信号やnack(否定応答)信号とが重なることを防止するためである。
図6は、スレーブ制御部331により、送信データの受信からサブマスタ制御部330へデータを返信するまでの処理フローを表すフローチャートである。
CRCと巡回冗長データとが一致する場合スレーブ制御部331は、受信したデータがリードコマンドを含むかを確認する(S804:Y、S806)。リードコマンドを含まない場合にスレーブ制御部331は、ack信号をサブマスタ制御部330に送信する(S806:N、S807)。リードコマンドを含む場合にスレーブ制御部331は、ack信号をリードしたデータとともにサブマスタ制御部330に送信する(S806:Y、S808)。
常時リードモードはサブマスタ制御部330からの指示に基づき実行される。常時リードはたとえば、搬送モジュールに接続されている紙搬送の状態を検知するためのセンサの出力値を常時監視するときなど、サブマスタ制御部330がリアルタイムに最新情報を取得する必要がある場合に使用される。
サブマスタ制御部330は、常時リードデータにより、スレーブ制御部331のレジスタ情報を取得することができる。サブマスタ制御部330は、レジスタ情報を取得することで、例えば、ライト時の送信データをレジスタ情報に基づいて生成することが可能である。例えば、レジスタ情報がポリゴンミラー駆動モータ415の状態(例えば、回転数)を表す場合、この状態(回転数)が予め定められた状態(回転数)になるようにライト時の送信データを生成する。このようにして、駆動部の状態を適切に調整できる。
常時リードモードによりスレーブ制御部331がサブマスタ制御部330に送信する送信データ(以下、「常時リードデータ」という。)のフレームは、常時リードのデータであることを示す成就リードコマンド(pcmd)を含む。常時リードコマンドに続いて、送信リードデータ番号(id)、上位常時リードデータ(pdatH)、下位常時リードデータ(pdatL)、巡回冗長データ(crc)で構成される。巡回冗長データは、スレーブ制御部331により、常時リードコマンド、送信リードデータ番号、上位常時リードデータ、及び下位常時リードデータから算出される。
スレーブ制御部331のスレーブ通信制御部405は、転送周期制御部406から転送周期に合わせて出力される転送周期信号に基づいて、常時リードデータの転送タイミングを判断する(S703)。スレーブ通信制御部405は、常時リードデータの転送周期のタイミングまで待つ(S703:N)。
スレーブ制御部331がシリアル通信バス380rxを介してデータを送信中であるか否かを判定する(S705)。スレーブ制御部331がデータを送信中であれば、送信が終了するまで待機する(S705:Y)。送信中でなければ、常時リードデータの転送を行うシーケンスへと遷移する(S705:N)。
このようにすることにより、常時リードモードにおけるリードデータの送信が、サブマスタ制御部330からの指示に対する返信データと重なって返信を阻害することを防止することができる。つまり、サブマスタ制御部330からの指示に対する返信データがない、シリアル通信バス380rxの空時間を利用して常時リードデータを送信することができる。
つまり、サブマスタ制御部330のサブマスタ通信制御部404からシリアル通信バス380txを介してデータの送信が無い場合、スレーブ制御部331のスレーブ通信制御部405が常時リードデータを転送する。よって、サブマスタ制御330との通信を阻害せずに常時リードを実現することができる。また、シリアル通信バス380を効率よく使用して、伝送量を増大することができる。
サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号を正しく受信できなかった場合、データを再度送信する(S602:N、S601)。
スレーブ制御部331は、データを正しく受信した場合、ACC/DEC制御部408によりポリゴンミラーの回転を開始する(S602:Y、S603)。そして、スレーブ制御部331は、ack信号をサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号を正しく受信できなかった場合、データを再度送信する(S604:N、S603)。
スレーブ制御部331は、データを正しく受信した場合、ドラムモータ制御部409により感光体225Yの回転周期を設定する(S604:Y、S605)。そしてスレーブ制御部331は、ack信号をサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号を正しく受信できなかった場合、データを再度送信する(S606:N、S605)。
スレーブ制御部331は、データを正しく受信した場合、ドラムモータ制御部409により感光体225Yの回転を開始する(S606:Y、S607)。そしてスレーブ制御部331は、ack信号をサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号を正しく受信できなかった場合、データを再度送信する(S608:N、S607)。
スレーブ制御部331は、データを正しく受信した場合、ローラ駆動制御部410によりローラ227の回転周期を設定する(S608:Y、S609)。そしてスレーブ制御部331は、ack信号をサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号を正しく受信できなかった場合、データを再度送信する(S610:N、S609)。
スレーブ制御部331は、データを正しく受信した場合、ローラ駆動制御部410によりローラ227の回転を開始する(S610:Y、S611)。そしてスレーブ制御部331は、ack信号をサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号を正しく受信できなかった場合、データを再度送信する(S612:N、S611)。
スレーブ制御部331は、データを正しく受信した場合に、高圧生成制御部411によりPWMの周期を設定する(S612:Y、S613)。そしてスレーブ制御部331は、ack信号をサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号を正しく受信できなかった場合、データを再度送信する(S614:N、S613)。
スレーブ制御部331は、データを正しく受信した場合、高圧生成制御部411によりPWMの出力を開始する(S614:Y、S615)。そしてスレーブ制御部331は、ack信号をサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号を正しく受信できなかった場合、データを再度送信する(S616:N、S615)。
スレーブ制御部331は、データを正しく受信した場合、ACC/DEC制御部408によりポリゴンミラーの状態を確認する(S616:Y、S617)。そしてスレーブ制御部331は、ack信号及びポリゴンミラーの状態を表すリードデータをサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号及びリードデータを正しく受信できなかった場合、データを再度送信する(S618:N、S617)。
サブマスタ制御部330は、スレーブ制御部331からack信号を正しく受信した場合、リードデータにより、ポリゴンミラーの回転状態を確認する(S618:Y、S619)。ポリゴンミラーの回転状態が異常であれば、サブマスタ制御部330は、再度ポリゴンミラーの回転状態を確認する(S619:N、S617)。
スレーブ制御部331は、データを正しく受信した場合、ドラムモータ制御部409により感光体225Yの状態を確認する(S620)。そしてスレーブ制御部331は、ack信号及び感光体225Yの状態を表すリードデータをサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号及びリードデータを正しく受信できなかった場合、データを再度送信する(S621:N、S620)。
サブマスタ制御部330は、スレーブ制御部331からack信号を正しく受信した場合、リードデータにより、感光体225Yの状態を確認する(S621:Y、S622)。感光体225Yの状態が異常であれば、サブマスタ制御部330は、再度感光体225Yの状態を確認する(S622:N、S620)。
スレーブ制御部331は、データを正しく受信した場合、ローラ駆動制御部410によりローラ227の状態を確認する(S623)。そしてスレーブ制御部331は、ack信号及びローラ227の状態を表すリードデータをサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号及びリードデータを正しく受信できなかった場合、データを再度送信する(S624:N、S623)。
サブマスタ制御部330は、スレーブ制御部331からack信号を正しく受信した場合、リードデータにより、ローラ227の状態を確認する(S624:Y、S625)。ローラ227の状態が異常であれば、サブマスタ制御部330は、再度ローラ227の状態を確認する(S625:N、S623)。
スレーブ制御部331は、データを正しく受信した場合、高圧生成制御部411により高圧状態を確認する(S626)。そしてスレーブ制御部331は、ack信号及び高圧状態を表すリードデータをサブマスタ制御部330に送信する。一方、データを正しく受信できなかった場合スレーブ制御部331は、nack信号をサブマスタ制御部330に送信する。サブマスタ制御部330は、スレーブ制御部331からnack信号を受信した場合、或いはack信号及びリードデータを正しく受信できなかった場合、データを再度送信する(S627:N、S626)。
サブマスタ制御部330は、スレーブ制御部331からack信号を正しく受信した場合、リードデータにより、高圧状態を確認する(S627:Y、S628)。高圧状態が異常であれば、サブマスタ制御部330は、再度高圧状態を確認する(S628:N、S626)。高圧状態が正常であれば、作像モジュール304の準備が終了する(S628:Y)
Claims (5)
- 第1制御手段と、
負荷が接続されており、前記第1制御手段からの指示に基づき該負荷を制御する第2制御手段と、
前記第1制御手段から前記第2制御手段にデータを送信する第1通信ラインと、
前記第2制御手段から前記第1制御手段にデータを送信する第2通信ラインと、を有する画像形成装置であって、
前記第1制御手段は、前記第2制御手段に前記指示を送信し、前記第2制御手段から前記指示に対する返信を受信し、
前記第2制御手段は、
データを保持する保持手段と、
前記第1通信ラインを介して前記第1制御手段からの前記指示を受信すると前記第2通信ラインを用いて前記第1制御手段に前記返信を行うとともに、前記第1通信ラインを介して前記第1制御手段から特定のモードに設定するための指示を受信したときに、設定された周期に基づいて、前記保持手段に保持されているデータを、定期的に前記第2通信ラインを介して前記第1制御手段に送信する処理手段と、を有し、
前記処理手段は、前記特定のモードにおいて、
前記周期に基づいて前記保持手段が保持するデータを送信するタイミングを決定し、
前記決定されたタイミングが、前記第1通信ラインを介して前記第1制御手段から前記指示を受信する第1状態及び前記第2通信ラインを介して前記第1制御手段に前記返信を行う第2状態であるかを判断し、前記第1状態及び前記第2状態のいずれでもない場合は前記保持手段に保持されているデータを送信し、前記第1状態または前記第2状態である場合は、前記保持手段に保持されているデータの送信のタイミングを遅延させて、前記返信と重ならないように前記保持手段に保持されているデータを送信することを特徴とする、
画像形成装置。 - 前記第2制御手段は、
前記第1通信ラインを介して前記第1制御手段からの前記指示を適切に受信できたか否かを判定する判定手段を有し、
前記返信は、前記判定手段の判定結果であることを特徴とする、
請求項1記載の画像形成装置。 - 前記第1制御手段からの前記指示は、コマンドデータと前記保持手段におけるアドレスを示すデータと巡回冗長データとを含み、
前記判定手段は、受信した前記第1制御手段からの前記指示から算出した巡回冗長データと、前記第1制御手段からの前記指示に含まれる巡回冗長データとから、前記第1制御手段からの前記指示を適切に受信できたか否かを判定することを特徴とする、
請求項2記載の画像形成装置。 - 前記処理手段は、前記遅延されたタイミングにて前記保持手段に保持されている前記データを読み出すことを特徴とする、
請求項1乃至3のいずれか1項記載の画像形成装置。 - 前記第1制御手段からの前記指示には書き込み指示と読み出し指示とがあり、
前記書き込み指示は、書き込み指示を示すコマンドと、前記保持手段におけるアドレスを示すデータと、前記保持手段におけるアドレスに書き込むデータと、巡回冗長データとを含み、
前記読み出し指示は、読み出し指示を示すコマンドと、前記保持手段におけるアドレスを示すデータと、ダミーデータと、巡回冗長データとを含み、
前記書き込み指示と前記読み出し指示とは同一のビット長であることを特徴とする、
請求項1記載の画像形成装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012153692A JP6039276B2 (ja) | 2012-07-09 | 2012-07-09 | 画像形成装置 |
| US13/892,911 US9176687B2 (en) | 2012-07-09 | 2013-05-13 | Image forming apparatus and communication method |
| EP13169629.6A EP2690503B1 (en) | 2012-07-09 | 2013-05-29 | Image forming apparatus and communication method |
| CN201310231162.1A CN103546655B (zh) | 2012-07-09 | 2013-06-09 | 图像形成设备和通信方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012153692A JP6039276B2 (ja) | 2012-07-09 | 2012-07-09 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014016791A JP2014016791A (ja) | 2014-01-30 |
| JP2014016791A5 JP2014016791A5 (ja) | 2015-08-20 |
| JP6039276B2 true JP6039276B2 (ja) | 2016-12-07 |
Family
ID=48485057
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012153692A Active JP6039276B2 (ja) | 2012-07-09 | 2012-07-09 | 画像形成装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9176687B2 (ja) |
| EP (1) | EP2690503B1 (ja) |
| JP (1) | JP6039276B2 (ja) |
| CN (1) | CN103546655B (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6897126B2 (ja) * | 2017-02-02 | 2021-06-30 | 株式会社リコー | 画像形成システム及び画像形成装置 |
| TWI755482B (zh) * | 2017-02-20 | 2022-02-21 | 日商精工愛普生股份有限公司 | 驅動器、光電裝置及電子機器 |
| JP7003461B2 (ja) * | 2017-07-06 | 2022-02-10 | 富士フイルムビジネスイノベーション株式会社 | スレーブ装置、通信装置及び画像形成装置 |
| US11018693B2 (en) * | 2018-07-12 | 2021-05-25 | Maxim Integrated Products, Inc. | System and method for continuously verifying device state integrity |
| CN110165689A (zh) * | 2019-05-23 | 2019-08-23 | 远景能源(江苏)有限公司 | 一种用于储能系统的控制系统以及相应储能系统 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4170791A (en) | 1977-08-30 | 1979-10-09 | Xerox Corporation | Serial data communication system for a reproduction machine |
| US5278958A (en) * | 1988-01-27 | 1994-01-11 | Kabushiki Kaisha Toshiba | Method and apparatus for selecting a keyboard on a computer system |
| JP3486427B2 (ja) * | 1993-01-18 | 2004-01-13 | キヤノン株式会社 | 制御装置および制御方法 |
| JPH0993231A (ja) | 1995-09-21 | 1997-04-04 | Fujitsu Ltd | 双方向データ伝送方法及び双方向データ伝送システム |
| JP4209743B2 (ja) * | 2003-08-08 | 2009-01-14 | 三菱電機株式会社 | 電子制御装置 |
| JP4748788B2 (ja) | 2005-11-25 | 2011-08-17 | キヤノン株式会社 | 画像形成システム、画像形成装置、シート処理装置および通信方法 |
| JP5460084B2 (ja) * | 2009-03-12 | 2014-04-02 | キヤノン株式会社 | 画像形成装置 |
| US10073626B2 (en) * | 2013-03-15 | 2018-09-11 | Virident Systems, Llc | Managing the write performance of an asymmetric memory system |
-
2012
- 2012-07-09 JP JP2012153692A patent/JP6039276B2/ja active Active
-
2013
- 2013-05-13 US US13/892,911 patent/US9176687B2/en active Active
- 2013-05-29 EP EP13169629.6A patent/EP2690503B1/en active Active
- 2013-06-09 CN CN201310231162.1A patent/CN103546655B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN103546655B (zh) | 2016-02-24 |
| US20140009785A1 (en) | 2014-01-09 |
| US9176687B2 (en) | 2015-11-03 |
| EP2690503B1 (en) | 2020-07-08 |
| CN103546655A (zh) | 2014-01-29 |
| JP2014016791A (ja) | 2014-01-30 |
| EP2690503A1 (en) | 2014-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6039276B2 (ja) | 画像形成装置 | |
| KR101403259B1 (ko) | 화상 형성 장치 | |
| US8892932B2 (en) | Image forming apparatus and control apparatus | |
| US8639141B2 (en) | Image forming apparatus | |
| JP4942151B2 (ja) | 画像形成システム及び画像形成装置 | |
| JP5676950B2 (ja) | 画像形成装置 | |
| JP6004806B2 (ja) | 情報処理システム | |
| JP4756934B2 (ja) | 画像形成装置 | |
| US8149433B2 (en) | Image forming apparatus and control method for image forming apparatus | |
| JP4926526B2 (ja) | 画像形成装置およびその制御方法 | |
| US9665515B2 (en) | Bus arbitration apparatus provided to a bus connected to a plurality of bus masters, bus arbitration method, and computer-readable storage medium | |
| CN102193382A (zh) | 使用电子照相处理的图像形成设备 | |
| JP2001356556A (ja) | 画像形成装置 | |
| JP2019049933A (ja) | 情報処理装置および画像形成装置 | |
| JP2019012298A (ja) | 電子機器 | |
| JP6739199B2 (ja) | 欠歯ギア機構の制御装置及び画像形成装置 | |
| JP5587064B2 (ja) | 画像形成装置 | |
| JP5201564B2 (ja) | 画像形成装置 | |
| US10191432B2 (en) | Image forming apparatus and image forming method including pre-feeding of a recording medium | |
| JPH10133465A (ja) | カラー電子写真装置 | |
| JP2014044558A (ja) | 分散制御システム、制御装置 | |
| JP2020190657A (ja) | 画像形成装置及びシート搬送装置 | |
| JP2005305769A (ja) | 画像形成エンジンおよび画像形成装置 | |
| JP2007022794A (ja) | 画像形成装置 | |
| JP2018202769A (ja) | 画像形成システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150706 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150706 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160712 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161004 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161104 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6039276 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |