JP5630958B2 - 高周波数アレイ超音波システム - Google Patents
高周波数アレイ超音波システム Download PDFInfo
- Publication number
- JP5630958B2 JP5630958B2 JP2008539044A JP2008539044A JP5630958B2 JP 5630958 B2 JP5630958 B2 JP 5630958B2 JP 2008539044 A JP2008539044 A JP 2008539044A JP 2008539044 A JP2008539044 A JP 2008539044A JP 5630958 B2 JP5630958 B2 JP 5630958B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- ultrasound
- transducer
- transmission
- transmit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






























































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52085—Details related to the ultrasound signal acquisition, e.g. scan sequences
- G01S7/52095—Details related to the ultrasound signal acquisition, e.g. scan sequences using multiline receive beamforming
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/56—Details of data transmission or power supply
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/56—Details of data transmission or power supply
- A61B8/565—Details of data transmission or power supply involving data transmission via a network
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
- G01S15/8927—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array using simultaneously or sequentially two or more subarrays or subapertures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/895—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques characterised by the transmitted frequency spectrum
- G01S15/8956—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques characterised by the transmitted frequency spectrum using frequencies at or above 20 MHz
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8997—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using synthetic aperture techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52034—Data rate converters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52085—Details related to the ultrasound signal acquisition, e.g. scan sequences
- G01S7/52087—Details related to the ultrasound signal acquisition, e.g. scan sequences using synchronization techniques
- G01S7/52088—Details related to the ultrasound signal acquisition, e.g. scan sequences using synchronization techniques involving retrospective scan line rearrangements
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/18—Methods or devices for transmitting, conducting or directing sound
- G10K11/26—Sound-focusing or directing, e.g. scanning
- G10K11/34—Sound-focusing or directing, e.g. scanning using electrical steering of transducer arrays, e.g. beam steering
- G10K11/341—Circuits therefor
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/18—Methods or devices for transmitting, conducting or directing sound
- G10K11/26—Sound-focusing or directing, e.g. scanning
- G10K11/34—Sound-focusing or directing, e.g. scanning using electrical steering of transducer arrays, e.g. beam steering
- G10K11/341—Circuits therefor
- G10K11/346—Circuits therefor using phase variation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8959—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using coded signals for correlation purposes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52019—Details of transmitters
- G01S7/5202—Details of transmitters for pulse systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/523—Details of pulse systems
- G01S7/524—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/523—Details of pulse systems
- G01S7/526—Receivers
Description
本願は、2005年11月2日出願の米国仮特許出願第60/733,091号の利益を主張し、2005年11月2日出願の米国仮特許出願第60/733,089号の利益を主張する。上記出願の両方が、本明細書において完全に援用され、本明細書の一部を構成する。
本明細書では、複数の素子を有する超音波振動子から受信超音波信号を取得するように構成された信号処理ユニットを含む超音波信号取得システムの実施態様を提供する。システムは、少なくとも毎秒20フレーム(fps)のフレームレートで、少なくとも5.0ミリメートル(mm)の視野を有する振動子を使って、少なくとも15メガヘルツ(MHz)の周波数を有する超音波信号を受信するように構成される。その他の実施態様では、超音波信号は、50、100、または200(fps)の取得レートで取得することができる。任意に、超音波信号は、毎秒200フレーム数(fps)以上の取得レートで取得することができる。その他の実施例では、受信超音波信号は、約100fps〜200fpsの範囲内のフレームレートで取得することができる。いくつかの例示的な態様では、振動子の長さは視野に等しい。視野は、心臓学用の小動物の心臓および周囲組織、並びに腹部イメージング用の実物大の胎児など、関連する臓器を含むのに十分な広さにすることができる。一実施態様では、振動子の双方向帯域幅は、約50%〜100%で良い。任意に、振動子の双方向帯域幅は、約60%〜70%で良い。双方向帯域幅は、振動子が超音波の送信機、および受信器の両方として使用される時に生じる振動子の帯域幅を意味し、つまり双方向帯域幅は、二乗単方向スペクトルの帯域幅である。
様々な実施態様では、振動子としては、線形アレイ振動子、位相アレイ振動子、二次元(2−D)アレイ振動子、または曲線アレイ振動子が挙げられるが、これらだけに限らない。線形アレイは、一般に平坦であり、つまりすべての素子は、同じ(平坦な)平面に存在する。曲線線形アレイは、一般に、素子が曲線状平面内に存在するように構成される。本明細書に記載されている振動子は、「固定」振動子である。「固定」という用語は、振動子アレイが、所望の動作パラメータを達成するか、または超音波データのフレームを取得するために、超音波の送信または受信時に、方位角方向の運動を利用しないことを意味する。さらに、振動子を走査ヘッドまたはその他のイメージングプローブ内に配置する場合、「固定」という用語は、振動子が、動作時に走査ヘッド、プローブ、またはこれらの部分に対して、方位角方向または左右方向に移動しないことも意味する。上記のように固定されている上記の振動子は、全体的に、「アレイ」、「振動子」、「超音波振動子」、「超音波アレイ」、「アレイ振動子」、「アレイド振動子」、「超音波振動子」、もしくはこれらの組合せとして記載されるか、または当業者が超音波振動子を意味すると認識すると思われるその他の用語で記載される。本明細書に記載される振動子は、超音波フレーム間で移動することが可能性であり、たとえば、超音波データのフレームを取得した後の走査平面間で移動することが可能だが、このような移動は、振動子の動作に必須ではない。しかし、当業者が理解するとおり、本発明のシステムの振動子は、イメージングされたオブジェクトに対して移動することが可能だが、動作パラメータに関しては固定された状態を維持する。たとえば、振動子は、動作時に被検体に対して移動し、走査平面の位置を変更するか、または被検体もしくはその下にある生体構造の異なる視界を取得することが可能である。
このシステムは、各々の受信チャネルに1つまたは複数の信号サンプラをさらに含むことができる。信号サンプラは、アナログデジタル変換器(ADC)で良い。信号サンプラは、受信信号を直接サンプリングするための直接サンプリング技術を使用することができる。任意に、信号サンプラは、帯域幅サンプリングを使用して、受信信号をサンプリングすることができる。別の態様では、信号サンプラは、直交サンプリングを使用して、受信信号をサンプリングすることができる。任意に、直交サンプリングでは、信号サンプラは、位相が90°変位したサンプリングクロックを含む。また、直交サンプリングでは、サンプリングクロックは受信期間も有し、受信クロック周波数は、受信超音波信号の中心周波数にほぼ等しくて良いが、送信周波数とは異なる。たとえば、多くの状況では、受信信号の中心周波数は、イメージングされる組織内の周波数依存減衰により、送信信号の中心周波数より低く変位した。こうした状況では、受信サンプルクロック周波数は、送信周波数より低くて良い。
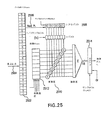
次に、図2A〜15Bを参照すると、本発明の一実施態様による回路基板は、例示的な振動子を収納するように構成され、少なくとも1つの従来のコネクタに接続するようにさらに構成される。本明細書に記載するとおり、要求された信号の送信および/または供給用のケーブルと相補的に接続するように構成することができる。図を参照すると、回路基板の微細な詳細により、別様に指示されていない限り、図面は、相補的な回路基板および関連するマルチ素子アレイを単に表している。図5A〜5Cは、75ミクロンピッチを有する256個の素子アレイ用の例示的な回路基板の様々な図を示す。
2つの信号ピン、GND
3つの信号ピン、GND
2つの信号ピン、GND
3つの信号ピン. . . .
.. . 、GND
3つの信号ピン、GND
2つの信号ピン、GND
2つの信号ピン、GND。
例示的な医療用ケーブルは、図15Aに部分的に示すように、処理ユニットに接続するケーブルの端部である近位端にZIFコネクタを備える。当業者は、ケーブル組立体のいくつかの構造が可能であることを理解するであろう。図15Bは、例示的なZIFコネクタに使用可能なピン配列を示す。Gというラベルを付けられたピンは、信号リターンピンである。N/Cというラベルを付けられたピンは同軸ケーブルで終端せず、これらのピンは、シャーシ接地を保護するか、または特定されていないその他の機能として使用するために留保される。N/Cピンは、単にZIF筐体を取り外し、ZIFに接続される12個のPCBの何れかの未使用のトレースのはんだを除去することによって接近することができる。

本発明による超音波システム1600の例示的な実施態様を図16に示す。図16は、例示的な超音波イメージングシステム1600を示すブロック図である。様々な図面に示されているブロックは、システム1600の一実施態様内で行われるプロセスの機能表現で良い。しかし、実際上、機能は、システム1600内のいくつかの位置またはモジュール全体で行われる。
図23は、本発明の一実施態様による例示的なシステムを示すブロック図である。例示的なシステム2300は、たとえば最大256の素子を有する線形アレイと結合される。マイクロ同軸ケーブル2304の束は、アレイ2302と処理ユニット2306との間の信号の送信を提供する。例示的なシステムは、処理ユニットをさらに備える。
図23に示すシステムの例示的な仕様は、たとえば以下の表3に記載する仕様を含む。
システム、またはその一部は、たとえばカートなどの移動可能な構成内に収容され、ビーム成形器の電子回路2316、コンピュータユニット2310、および電源ユニット2312を含む。ユーザインターフェースは、カスタムコントロールを含む一体型キーボード2318、トラックボール、モニター、スピーカ、およびDVDドライブを備える。カートのフロントパネル2320は、アレイベースの振動子2302、並びにECG、血圧、および温度など、マウスの生理学的情報を接続するコネクタ2322を有する。カートの後部周辺パネル2314は、リモートモニター、フットスイッチ、およびネットワーク2324などの様々な周辺デバイスの接続を可能にする。カートは、様々な電子回路の熱を制御するための冷却ファン2326、エアガイド、および換気口のシステムを有する。
濾過された周囲空気は、ファン2326の使用により、たとえば、ビーム成形器電子回路(つまり、ビーム成形器カードケージ2316、およびコンピュータユニット2310)を含むシステムカートの電子回路に供給される。冷却システムは、たとえば、一実施態様では、+10〜+35℃の周囲動作温度範囲をサポートし、排気温度は、周囲温度より上の20℃未満に維持されるが、その他の周囲動作温度範囲は本発明の範囲内で考えられる。
一実施態様では、例示的なシステムには、外部の電磁エネルギーが、システムの動作を干渉するのを防止し、システムが生成する電磁エネルギーがシステムから放射されるのを防止するため、接触EMIシールドが備えられる。
本発明による例示的なシステムの電子回路のの一実施態様の概略を図24に示す。この図では、例示的なシステムは、電源ユニット2402、器具電子回路差ブラック、およびコンピュータユニットから成る。電源ユニット2402は、ACおよびDC電力をカートに分配する。たとえば、48VのDC電圧は、器具電子回路サブラックに供給されるが、その他の電圧は本発明の範囲内で考えられる。器具電子回路サブラックは、ビーム成形器制御盤2404、4つの同じチャネル基板2406、およびバックプレーン2408を収容する。基板2406は、たとえばブラインド嵌合コネクタを介してバックプレーン2408と嵌合する。器具電子回路は、たとえばPCIエクスプレス接続2410を介してコンピュータユニットと通信する。
例示的なチャネル基板は、図18a〜18dに示し、これらの図に関連して以前に説明した。チャネル基板2406は、送信ビーム成形に適するタイミングで送信信号を生成し、受信信号を取得、デジタル化、およびビーム成形する。図24の例示的な実施態様では、4つのチャネル基板2406があり、各々の基板は16の送信チャネルおよび16の受信チャネルを備える 各々のチャネル基板2406は、送信出力ステージ、電源回路構成、送信ビーム成形器用のFPGA、受信ビーム成形器の部分和を提供するためのFPGA、ビーム成形器バス、およびバックプレーンとの接続を含む64のフロントエンド回路も備える。
送信チャネルの多重化は、送信出力ステージの前に行われる。送信ビーム成形器は、最大256個の素子を有するアレイで動作することができるので、1つの素子に1つ、256個の送信出力ステージが存在する。図20および21に示し、これらの図に関して説明するとおり、各々の出力ステージは、中心タップ変換器を駆動する2つのMOSFETから成り、中心タップにおける電源電圧はパルス振幅を制御する。出力波形は、可変サイクル数を有するほぼ方形波である。変換器の二次の一方の端部はアレイ素子に至り、他方の端部は受信保護回路に至る。受信インピーダンス素子は、インピーダンス整合およびフィルタリングを提供する。各々のMOSFETと直列のFETスイッチは、多重化を提供する。変換器および誘導子は、たとえば、プリント回路基板上のトレースとしてインプリメントされる。変換器には、基板の開口部内に挿入されるフェライト磁針がある。
各々の送信チャネルは、図18で分かるとおり、4つの出力ステージに多重化される。チャネルごとに2つの送信信号があり、プッシュプル出力ステージの各々の位相を駆動する。図20および21で分かるとおり、送信チャネルのアナログセクションは、適切な増減時期に、出力ステージのMOSFETのゲートキャパシタンスを駆動することが可能なプッシュプルタイプのドライバ回路から成る。これらは、アナログスイッチにより、出力ステージに多重化される。
図22で分かるとおり、送信ビーム成形器は、DDRメモリを使用して、最大約800Hzで計時される送信波形を生成する。各々のチャネルは、DDRメモリ出力を使用する。出力クロックレートは、中心周波数(cf)の約16倍であり、それによって適切な遅延分解能の機能を提供する。ジッターは、PECLでDDR出力を再計時することによって減少する。図22Aで分かるとおり、約16倍のクロックレートでは、送信波形整形は、正または負の半周期の幅を調節することによって行うことができる。この機能は、正および負の半周期間に「不感時間」を導入し、出力パルスの波形を改善することができる。
256個の素子から成る振動子アレイの場合、1つのセクションが各々のアレイ素子に専用の256個のフロントエンド回路セクションがある。図17で分かるとおり、各々のフロントエンド回路は、フロントエンド変換器1702、送信出力ステージ1703、送信MUX 1708、受信MUX1704、ダイオードリミッタ、および受信フィルタリング用の構成要素を備える。
図17で分かるとおり、各々の受信チャネルは、受信信号の取得に関連する回路素子を含む。受信マルチプレクサ1704は、64個の受信チャネルをアクティブアパーチャ内の素子に接続し、これらの素子は、256素子アレイ内の最大64個の素子のサブセットである。
図17に示す類の受信ビーム成形器は、受信アパーチャの各々のチャネルが取得したデジタルデータを個々に処理および加算するモジュールである。その機能としては、たとえば、受信アパーチャサイズの動的制御、つまり、各々の受信サンプルの取得時に使用されるチャネル数、受信アポダイゼーションの動的制御、つまり、受信アパーチャに適用されるウィンドウ、動的受信集束、つまり受信信号のアップサンプリング、および各々のサンプルの取得時に、補間フィルタの使用により、各々の受信チャネルに適用される遅延の調節、並びにアレイ内のアパーチャ位置の変化が挙げられる。
図24の例示的なに示すように、4つのチャネル基板2406があり、各々のチャネルは、26の送信チャネルおよび16の受信チャネルを含み、これらのチャネルはすべて、バックプレーン内に差し込まれる。各々のチャネル基板には、バックプレーン内の位置に基づいてアドレスが割り当てられ、各々の基板を個々に制御することができる。
図24の例示的なシステムのビーム成形器制御盤2404は、ホストCPU(バックエンド)に対するデータのアップリンク、並びにハードウェア電子回路の集中タイミングおよび制御を提供する。ホストCPUに対するリンクは、PCI Expressバス2410を介して行われ、レーンごとに各方向に約250MB/秒のデータビットレートを可能にする。×8レーン幅PCI Expressリンクは、約4GB/秒のピークフルデュプレックス帯域幅を提供する。
送信ビーム成形器制御装置:
送信(TX)ビーム成形器制御装置は、各送信ラインの送信ビーム成形器パラメータを更新する。パラメータは、送信中心周波数(fc)における粗遅延数、微細遅延サイクル数(16×fcにおける)、送信波形(16×fcにおける)、送信サイクル数、送信選択、および送信電圧を含む。送信ビーム成形器の制御は、二重モード、三重モード、または複数の焦点域のパラメータの更新も予定する。
受信ビーム成形器制御装置は、各々のチャネルの受信遅延プロファイル、アパーチャサイズ、およびアポダイゼーションを制御する。遅延制御は、粗遅延および微細遅延から成り、これらは、それぞれデュアルポートRAM読取りポインタ、および補間フィルタ係数セレクタビットによって制御される。
送信/受信同期化のブロック図を図27に示す。BモードおよびMモードイメージングの場合、異なる送信および受信周波数を使用することができる。しかし、クロックは非同期なので、送信サイクルと受信サイクルとの間のライン間タイミング差ジッターが導入される。図27の実施態様に示すように、送信および受信クロックを同期化する方法は、プログラム可能なドライバ(TX_除算器)2714を使用して、送信クロック(TXCLK×16)から受信クロック(RXCLK_B)を生成することである。受信周波数は、一定の比率の送信周波数である。比率は、送信クロック周波数×16をNで除算した値であり、Nは整数である。たとえば、30MHzの送信クロック周波数、および26.7MHzの受信クロック(RXCLK_B)周波数を生成するには、TX_除算器2714は、18で除算するように設定される。除算器の性質により、RXCLK_Bは、TXCLK×16と良好な位相整列状態にあり、2つのクロックは常に、最小位相差を有する。RXCLK_Bは、ライントリガ(SOL)2702の開始を同期化するために使用される。ライントリガの同期化の開始(SOL_S)2704は、TX_TRGを生成する。TX_TRGは、TX_TRG SYNC2716によってTXCLK×8に同期化される。SOL_SおよびTX_TRG間の遅延は、必要に応じて加算することができる。TX_TRGは、送信サイクルを開始するように送信ビーム成形器に信号を送信する。RXGATEはRXCLK_Bに同期化され、データの取得を開始するように受信ビーム成形器に信号を送信する。乗算器(RX PLL)2718は、I/Qクロック発生器2720がIおよびQクロックを生成するために必要とするRXCLK×4クロック周波数を提供する。
クロック発生器2428は、送信および受信ビーム成形に適するクロック周波数を提供する。クロック発生器2428は、低ジッターマスタークロック、プログラム可能除算器、クロックバッファ、および再同期化回路を備える。周波数は、送信周波数(fc)−−25〜50MHz、受信周波数−−同相および直交の20〜50MHz、デジタルクロック−−fc×2、×4、×8、×16である。この例示的な実施態様に使用される最高速のクロックは、800MHz(50MHz×16)で良い。
PCI Expressブリッジ 2426は、PCIバス2410を介してホストCPUおよび内臓CPU2424を接続する。これは、RFシネバッファ2420からホストプロセッサメモリへ、およびこの逆のDMA転送を可能にする。PCI Expressは、PCIおよびPCI−Xバスの通信モードに基づく。PCI Expressは、シングルまたはバースト読み/書きコマンドで、PCIおよびPCI−Xと同じメモリマッピングアドレス空間を使用する。しかし、PCI Expressは、スイッチを使用して異なるデバイスを接続するポイント間シリアルインターコネクトであるが、PCIおよびPCI−Xはパラレルマルチドロップバスである。PCI Expressは、カードエッジコネクタを介するか、またはケーブル上で、チップ間または基板間通信リンクとして使用することができる。
チャネル基板2416からの部分和ビーム成形器のRFデータは、合成アパーチャFPGA内で最初に処理される。この処理は、ビーム成形器の最終加算、合成アパーチャ、およびFIFOへの書込みを含む。
機能上、RFシネバッファ2420は、たとえば、1GバイトのデュアルポートRAMである。RFシネバッファ2420は、ラインおよびフレームに構成されたRFデータを記憶するランダムアクセスメモリブロックである。データは、非同期信号処理をサポートする様々なレートの入力および出力で良い。データ流は、インターリーブされたIおよびQビーム成形データから構成される。FIFOバッファは、ビーム成形器データの記憶装置を提供し、メモリは、次の表示期間でCPUによって読み取られる。
上記の例示的な超音波システムの一実施態様によると、ある動作モードでは、1秒当たり数百フレームの範囲の非常に高い取得フレームレートが可能である。表示レートは、取得レートに等しい必要はない。ヒトの眼は限られた反応時間を有し、急激な運動の変化では、ローパスフィルタとして作用する。30fpsを超えるフレームレートは、感知される運動情報を増加する上で殆ど利点はない。このため、表示された超音波画像情報は、取得レートが非常に高い場合、30fps以下の処理データレートで良い。取得を信号処理から分離するには、大型のRFバッファメモリを使用して、ビーム成形器出力データを記憶する。ビーム成形器の出力データ(date)をバッファするための例示的な構造を図28に示す。図28に示すように、メモリバッファ2800は、RFデータの多くのフレームを保持することができる。512波長の深さの場合、16ビットの直交サンプリングされたフルラインRFのは、4Kバイト(1024、I、Qサンプル*32ビット/対)を使用する。フレーム当たり512の光線の場合、1Gバイトのメモリバッファは512の2Dフレームを保持することができる。バッファに書き込まれるフレームのトラックを維持するには、書込みコントローラは、「最初のフレーム」および「最後のフレーム」ポインタを維持し、これらのポインタは、信号処理タスクによって読み取ることができ、読取りに使用可能なバッファ内の最初のフレーム、および読取りに使用可能な最後のフレームをそれぞれ指示する。
ビーム成形器制御盤2404は、ホストCPU上のデータロードおよび/または通信ロードを減少させるため、データパス内に信号プロセッサ2422を備える。プロセッサ2422は、たとえば、十分な数の乗算器およびメモリを含むFPGA、または、たとえば970PPCもしくは汎用DSPなどのCPUで良い。実行される信号処理機能は、ビーム成形器制御盤2404上の信号処理モジュール2422、およびコンピュータユニット(つまり、ホストコンピュータ)間で分割される。これらの機能は、ポストビーム成形制御、Bモード振幅の検出およびログの圧縮、PWドップラースペクトル概算、カラーフロークラッタフィルタ、および周波数/電力概算、非同期信号処理、またはフレーム平均を含む。どこで処理を行うかを決定する際に考慮される要素は、必要な処理速度、処理の複雑さ、および必要なデータ転送レートである。
Bモードイメージングの場合、信号処理モジュール2422は、ライン補間、検出、および非各を含むプロセスを実行する。
本発明による一実施態様では、ドップラーカラーフローイメージングは、Bモードイメージングと結合し、その結果、Bモード信号パスおよびドップラーカラーフロー信号パスの共通ブロックは、時間多重化され、両方のタイプの処理を提供する。一般に、Bモードラインは、当業者が周知しているとおり、BモードおよびCFIの相対光線ライン密度に応じて、各々の集合の1つまたは2つのラインのRFデータの取得でCFI集合間で取得される(一般的なCFI画像は、Bモードの光線ライン密度の半分を使用する)。
パルス状ドップラー取得は、単独で、二重モード、または三重モードである。二重モードの場合、PWドップラー送信パルスは、Bモード送信パルスとインターリーブされ、その結果、Bモード画像はリアルタイムで更新され、PWドップラーしのぐが取得される。インターリーブの方法は、選択されるドップラーPRFに基づく。Bモードイメージングとパルス状ドップラー処理間との間で共用される構成要素は時間多重化され、両方のタイプの処理が行われる。
Mモードイメージングでは、信号処理モジュール2422は、検出および比較を含む処理を実行する。
EKVは、タイミングイベントとして使用されるECG(心電計)信号を使用する後処理動作として、極めて高いフレームレート画像が生成される取得方法である(1秒当たり1000フレーム以上)。EKVイメージングは、単一素子の機械的走査振動子、または振動子アレイを使用してインプリメントされる。EKVイメージングは、2−D画像の各々のライン位置において、1000Hz以上のPRFで、ある期間にわたって超音波ラインを得する。各々のライン位置で超音波ラインが得される期間は、EKV期間と呼ばれ、たとえば1秒であり、これは、マウスまたは他の小動物の数回の心周期を捕捉するのに十分な長さである。各々の超音波ラインの取得は、単一送信パルスの点火、その後の返される超音波データの取得を含む。たとえば、2−D画像内に250のラインが存在する場合、EKVデータ集合で合計250,000の超音波ラインが取得される。EKV画像の各々のフレームは、心周期の同じ時間に取得される超音波ラインを集合させることによって再現される。
ビーム成形器制御盤2404上の内蔵CPU2422は、一実施態様では、PCIインターフェース2426およびDDRメモリインターフェースを有する32ビット内蔵マイクロプロセッサである。内蔵CPU2424の主な機能は、データとラフィック制御である。これは、受信ビーム成形器FIFO2418からRFシネバッファ2420、RFシネバッファ2420から信号処理モジュール2422、および信号処理モジュール2422からホストPCまでのデータの流れを制御する。
生理学的取得システム2430(または「マウス取得システム」)はマウス情報システムの入力部2438からのアナログ信号をフィルタリングして変換する。これらの信号は、被検体のECG、温度、呼吸作用、および血圧を含む。データの変換後、データは、ローカルバスを介して内蔵CPU2424のメモリに転送され、次にホストCPUに転送され、PCI Expressリンク2410を介して表示される。
ビーム成形器制御盤2404は、ラック電源2432を監視し、各々の基板上に生成される電圧を低下させる。たとえば、ラック電源2432は、+48VDCをバックプレーン2408に提供する。一実施態様では、各々のチャネル基板2406上の2つの高電圧調整装置が、フロントエンド回路の送信部分を供給する。ビーム成形器制御盤2404は、これらの調整装置の過電流または過電圧状態を監視する。
バックプレーン2408は、器具電子回路カードケージに実装される。一実施態様では、バックプレーン2408は、各々の基板を差し込むことを可能にするブラインド嵌合縁部コネクタを有するが、その他の接続スキームは本発明の範囲内で考えられる。バックプレーン2408は、基板と、カードケージ外部の信号の入力/出力コネクタとの間の相互接続を提供する。一実施態様では、バックプレーンのサイズは、高さ8U×幅84HPであり、8U×19”のラックマウントのVME式カードケージ内に適合する。カードケージの深さは、一実施態様では280mmである。
システムソフトウェア2330の一実施態様の概略は、図29に示す。一般に、システムソフトウェア2330は、Windows(登録商標) XPオペレーティングシステムを実行するIntelプロセッサプラットフォームなどのプロセッサプラットフォーム上で動作する。システムの一実施態様のプロセッサプラットフォームは、本明細書で以前に説明したコンピュータユニット2310によって提供される。あるいは、システムソフトウェア2330は、調査研究用の独立ワークステーションにロードされる。ワークステーションは、ビーム成形器ハードウェアを含まず、新しいデータを取得するための振動子も持たない。ワークステーションは、以前に取得された研究データを調査し、処理機能の限られた集合を実行する。たとえば、ユーザは、測定、異なるフレームレートでの再生、またはカラーマップの変更を追加することができる。
再び図24を参照すると、本発明によるこの実施態様では、システムは、カートの前部に1つの振動子コネクタ2438を有することが可能であり、振動子を切り換える場合、ユーザは最初の振動子を物理的に外し、次に別の振動子を差し込むことが可能であることが分かる。一実施態様では、これは、360ピン振動子コネクタ2438で良い。別の実施態様では、フロントパネルに2つの振動子コネクタを有する振動子選択基板を使用すると、物理的に振動子に触れずに、振動子間で切り換えることができる。
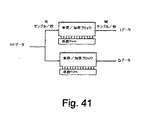
超音波イメージングシステムのもう1つの例示的な実施態様は、以下で説明し、図31に示すように、モジュール式のソフトウェアベースのアーキテクチャを含む。
この例示的なシステムのビーム成形器モジュール3102は、送信ビーム成形器を備える。送信ビーム成形器は、たとえば、アレイ素子のサブセットの選択によるアパーチャ制御、送信パルスの開始までの遅延タイミング、送信波形の生成、および送信アポダイゼーション制御を含む機能を提供することができる。例示的な実施態様の場合、振動子アレイ3112が使用される。一実施態様では、この振動子アレイ3112は、最大256個の素子を含む。送信器パルスドライバを振動子素子に切り換える高電圧の必要性をなくすため、ビーム成形器モジュール3102の送信ビーム成形器構成要素は、振動子アレイ素子の数に相当する多数の送信器から構成される。たとえば、256個の素子を有する例示的なアレイ振動子の場合、送信ビーム成形器は256個の送信器を備える。任意に、送信ビーム成形器は、256個未満の送信器、および個々の送信器を特定の素子に接続するための高電圧切換え方法を含むことができる。高電圧マルチプレクサは、256素子アレイからの線形サブセットを選択するために使用される。
ビーム成形器モジュール3102は、受信ビーム成形器構成要素も備える。例示的なシステムに使用できるインプリメンテーションを形成するいくつかの様々な受信ビームがある。以下に記載するデジタルな方法は、受信アパーチャ内の各々の素子のための最小のA/D変換器を有する。この例示的な実施態様では、A/D変換器のビット深度は10ビットであり、これは、−50dBの信号レベルで所望のビーム成形正確度を与える。A/Dダイナミックレンジは、スプリアスローブを減少させ、所望のコントラスト分解能を提供するように選択される。8ビットA/D変換器は、適切な場合は使用することができる。例示的なシステムの実施態様は64個の受信チャネルを使用し、合成アパーチャを使用して、最大フレームレートが不要なアプリケーションに128チャネルの受信アパーチャをインプリメントする。デジタル受信ビーム形成インプリメンテーションの1つの任意の方法は、信号の最高周波数より少なくとも2倍高いレートで(多くの場合、Nyquistレートと呼ばれる)、個々の素子から超音波信号をサンプリングする。たとえば、50MHz、100%帯域幅の振動子のNyquistサンプリングレートは、150MHz以上である。
ビーム成形器モジュール3102の受信ビーム成形器の構成要素の別の任意のサンプリング方法は、帯域幅サンプリングである。当業者が周知しているサンプリング理論は、連続関数は、帯域幅、Bヘルツ内の周波数のみを含む場合、1/(2*B)秒未満だけ離れている一連の点における値によって完全に決定されると規定している。帯域幅制限信号のサンプリングによって、サンプリングスペクトルとの一定の関係で現われる信号スペクトルの複数のコピーが得られる。これらの複製スペクトルが重複していないことを条件として、アンダーサンプルされたデータから最初の信号を再現することが可能である。たとえば、30MHzに中心をがある20MHzの最大帯域幅を有し、40MHzのレートでサンプリングされた信号を考える。この状況では、スペクトルは、図32に示すように複製される。最初のスペクトルは、40MHzのサンプルレートが信号のすべての情報を保存するのに適する場合、周波数スペクトルの0〜20MHz部分で複製される(また、スペクトルはfs/2周波数付近で反射するが、これは、後続の信号処理で考慮に入れることができる)。
直交サンプリングとして周知されている帯域幅サンプリングのもう1つの形式は、ビーム成形器モジュール3102の受信ビーム成形器の構成要素の実施態様に任意に使用することができる。このサンプリング方法では、2つのサンプルは、中心周波数に対して90°位相で取得される。これらのサンプルは、信号の帯域幅に等しい間隔で再現することができる。たとえば、直交サンプルが、中心周波数のすべての期間で取得される場合、サンプルレートは100%の帯域幅信号をサポートする。直交サンプリングから得られるサンプルの対は、サンプルが、異なる時間に取得されるため、真の相補(complimentary)対ではないが、分析波形の真のサンプルであり、共点直交サンプルは、2つのIおよびQサンプリングされた波形のサンプルを適時に同じ点に補間することによって観察することができる。直交サンプリングは、中心周波数の4倍でサンプリングする1つの高いサンプルレート変換器、または各々が中心周波数で動作するが、クロックは、中心周波数に対して90°だけ位相が異なる2つの比較的低い周波数変換器と共にインプリメントされるる。
任意に、さらに別の形式のサンプリングを受信ビーム成形器に使用することができる。この形式のサンプリングは、帯域幅サンプリングと結合するNyquistサンプリングである。通常のNyquistサンプリングは、比較的低い振動子中心周波数に使用され、帯域幅サンプリングは、比較的高い周波数に使用される。105MSPSの最大サンプルレートを有する商業的に使用可能な10ビットA/Dが使用可能である。このサンプルレート能力では、100%帯域幅を有する30MHz中心周波数振動子は、Nyquistレートで適切にサンプリングすることができる。40MHzでは、Nyquistサンプリングは、最大約60%の帯域幅を有する振動子に使用することができ、その結果、この中心周波数またはそれ以上の周波数では、帯域幅サンプリングを使用することができる。これらの比較的高いサンプルレートが使用される場合、ビーム成形器の処理回路構成は、比較的高いクロックレート、およびさらに高い記憶装置要件にも適応する。
(1) Qr=I*sin(角度)+Q*cos(角度)
(2) Ir=I*cos(角度)−Q*sin(角度)
補間されたIおよびQサンプルにこれらの回転方程式を使用すると、回転したIおよびQをコヒーレントに加算することが可能である。IおよびQサンプルの回転は、補間に使用される8つの係数に組み入れることができる。たとえば、偶数サンプルがIサンプルである最初の補間ウィンドウを使用する場合、上記の方程式(1)のsin(角度)は、各々のI係数を乗算することができ、cos(角度の項は、各々のQ係数を乗算することができる。次に、すべての積項を一緒に加算すると、結果として得られるFIRフィルタは、回転したQ値を提供する。同様に、係数の別の集合は、回転したI値を計算するために使用することができる。このスキームでは、FIRフィルタは、サンプル期間ごとに2回動作し、異なる係数を使用して、回転したQおよびI値の出力流を生成する。この流れは、他のチャネルの回転QおよびI値の流れと加算して、ビーム成形器の出力を生成することができ、この出力は、この場合、ダインターリーブされたI、Qデータであり、ウンコンバートされた加算RFを表す。あるいは、QおよびI値の補間は、各々4つの係数を有する別個のFIRフィルタと共にインプリメントされる。このスキームでは、位相回転は、補間後のステージでインプリメントされる。
ビーム成形に補間フィルタを使用すると、マルチライン走査が可能になる。マルチライン走査では、いくつかの受信ラインが、図38に示すように、同じ送信ビームで再現される。送信ビームは、一般に、受信ラインが取得される領域をカバーする大きい被写界深度と共に広げられる。
最大256個の素子を有するアレイに対する例示的なシステムインターフェースは、超音波画像を取得するために使用される。表4は、画像を取得するための例示的な深度範囲、視野、Bモードのフレームレート、およびカラーフローイメージングのフレームレートを示す。これらの動作パラメータは、左端の列に記載されている特定の小動物イメージングアプリケーションに使用することができる。しかし、当業者には明らかなとおり、動作パラメータのその他組合せは、小動物およびヒトの被検体の解剖学的構造またはその一部をイメージングするために使用することができる。
Claims (78)
- 超音波イメージングシステムであって、
前記超音波イメージングシステムは、
送信超音波信号を被検体内に、15メガヘルツ(MHz)〜80MHzの範囲内の送信中心周波数で送信するための複数の素子を有するアレイド超音波振動子と、
前記アレイド超音波振動子と動作可能に接続される信号処理ユニットと
を備え、
前記信号処理ユニットが、さらに、
1つまたは複数のフィールドプログラマブルゲートアレイ(FPGA)から成るデジタル送信ビーム成形器サブシステムであって、各FPGAがFPGAクロック周波数(FPGA fc)を有する、デジタル送信ビーム成形器サブシステムと、
受信ビーム成形器サブシステムと、
フロントエンド電子回路モジュールと、
ビーム成形器制御装置モジュールと、
信号処理モジュールと、
並列/直列変換器と、
コンピュータユニットと
から成り、
前記信号処理ユニットが、小さくとも15MHzの周波数を有する受信超音波信号を、前記アレイド超音波振動子から取得するように構成され、
前記並列/直列変換器が、前記送信超音波信号の微細遅延および半周期部分を符号化するビットワードを直列ビット流に変換するように構成され、
前記デジタル送信ビーム成形器サブシステムが、前記ビット流に応答して前記送信中心周波数を有する超音波信号を送信するように構成され、
前記送信超音波信号が、複数の第1半波サイクル部分と複数の第2半波サイクル部分とを含み、各々の第1半波サイクル部分が、第1パルス幅を有する第1送信パルスのうちの少なくとも1つを含み、各々の第2半波サイクル部分が、第2パルス幅を有する第2送信パルスのうちの少なくとも1つを含み、前記第1半波サイクル部分および前記第2半波サイクル部分は、同時に送信され、
前記ビットワードのうちの第1ビットワードは、前記第1送信パルスの前記第1パルス幅を符号化し、前記ビットワードのうちの第2ビットワードは、前記第2送信パルスの前記第2パルス幅を符号化し、前記第1パルス幅および前記第2パルス幅は、前記第1ビットワードおよび前記第2ビットワードの変更を介して個々に調節可能である、超音波イメージングシステム。 - 前記ビットワードが16ビットワードである、請求項1に記載の超音波イメージングシステム。
- 各々の第1送信パルスの持続時間が、各々の第1半波サイクル部分について調節可能であり、各々の第2送信パルスの持続時間が、各々の第2半波サイクル部分について調節可能である、請求項1に記載の超音波イメージングシステム。
- 各々の第1半波サイクル内の前記少なくとも1つの前記第1送信パルスの各々の微細遅延が調節可能であり、各々の第2半波サイクル内の前記少なくとも1つの前記第2送信パルスの各々の微細遅延が調節可能である、請求項3に記載の超音波イメージングシステム。
- 前記送信超音波信号が、複数の送信サイクルから成り、前記複数の送信サイクルのサイクル数が調節可能である、請求項1に記載の超音波イメージングシステム。
- 前記フロントエンド電子回路モジュールが、交換可能な差込みモジュールとして構成される、請求項1に記載の超音波イメージングシステム。
- 前記信号処理ユニットが、前記受信超音波信号を前記アレイド超音波振動子から取得するように構成され、前記アレイド超音波振動子が、線形アレイ振動子、位相アレイ振動子、二次元(2−D)アレイ振動子、曲線アレイ振動子から成る群から選択される、請求項1に記載の超音波イメージングシステム。
- 前記送信超音波信号が、15MHz〜55MHzの範囲内の送信中心周波数を有する、請求項1に記載の超音波イメージングシステム。
- アレイド超音波イメージングシステム用の信号処理ユニットであって、
前記信号処理ユニットが、
15MHz〜80MHzの範囲内の送信中心周波数で動作するように構成されたデジタル送信ビーム成形器サブシステムであって、前記デジタル送信ビーム成形器サブシステムが、さらに、1つまたは複数のフィールドプログラマブルゲートアレイ(FPGA)から成り、各FPGAが、FPGAクロック周波数(FPGA fc)を有する、デジタル送信ビーム成形器サブシステムと、
デジタル受信ビーム成形器サブシステムと、
フロントエンド電子回路モジュールと、
ビーム成形器制御装置モジュールと、
信号処理モジュールと、
並列/直列変換器と、
コンピュータユニットと
を備え、
前記信号処理ユニットが、複数の素子を有するアレイド超音波振動子から受信超音波信号を取得するように構成され、
前記並列/直列変換器が、前記送信超音波信号の微細遅延および半周期部分を符号化するビットワードを直列ビット流に変換するように構成され、
前記デジタル送信ビーム成形器サブシステムが、前記ビット流に応答して前記送信中心周波数を有する超音波信号を送信するように構成され、
前記送信超音波信号が、複数の第1半波サイクル部分と複数の第2半波サイクル部分とを含み、各々の第1半波サイクル部分が、第1パルス幅を有する第1送信パルスのうちの少なくとも1つを含み、各々の第2半波サイクル部分が、第2パルス幅を有する第2送信パルスのうちの少なくとも1つを含み、前記第1半波サイクル部分および前記第2半波サイクル部分は、同時に送信され、
前記ビットワードのうちの第1ビットワードは、前記第1送信パルスの前記第1パルス幅を符号化し、前記ビットワードのうちの第2ビットワードは、前記第2送信パルスの前記第2パルス幅を符号化し、前記第1パルス幅および前記第2パルス幅は、前記第1ビットワードおよび前記第2ビットワードの変更を介して個々に調節可能である、信号処理ユニット。 - 前記ビットワードが16ビットワードである、請求項9に記載の信号処理ユニット。
- 前記送信超音波信号が、複数の送信サイクルから成り、前記複数の送信サイクルのサイクル数が調節可能である、請求項9に記載の信号処理ユニット。
- 前記フロントエンド電子回路モジュールが、交換可能な差込みモジュールとして構成される、請求項9に記載の信号処理ユニット。
- 前記信号処理ユニットが、前記受信超音波信号を前記アレイド超音波振動子から取得するように構成され、前記アレイド超音波振動子が、線形アレイ振動子、位相アレイ振動子、二次元(2−D)アレイ振動子、曲線アレイ振動子から成る群から選択される、請求項9に記載の信号処理ユニット。
- 前記送信中心周波数が、15MHz〜55MHzの範囲内にある、請求項9に記載の信号処理ユニット。
- アレイド超音波イメージングシステム用のデジタル送信ビーム成形器であって、
前記デジタル送信ビーム成形器が、
各々がFPGAクロック周波数(FPGA fc)を有する1つまたは複数のFPGAと、
二重データレート(DDR)出力を有する並列/直列変換器と
を備え、
前記並列/直列変換器が、超音波信号の符号化された微細遅延および半周期部分を直列ビット流に変換するように構成され、
前記デジタル送信ビーム成形器が、前記ビット流に応答して15MHz〜80MHzの範囲内の送信中心周波数を有する超音波信号を送信するように構成され、
前記送信された超音波信号が、複数の第1半波サイクル部分と複数の第2半波サイクル部分とを含み、各々の第1半波サイクル部分が、第1送信パルス幅のうちの少なくとも1つを含み、各々の第2半波サイクル部分が、第2送信パルス幅のうちの少なくとも1つを含み、前記第1半波サイクル部分および前記第2半波サイクル部分は、同時に送信され、前記ビットワードのうちの第1ビットワードは、前記第1パルス幅を符号化し、前記ビットワードのうちの第2ビットワードは、前記第2パルス幅を符号化し、前記第1パルス幅および前記第2パルス幅は、前記第1ビットワードおよび前記第2ビットワードの変更を介して個々に調節可能である、デジタル送信ビーム成形器。 - 前記送信された超音波信号が複数の送信サイクルから成り、前記複数の送信サイクルのサイクル数が調節可能である、請求項15に記載のデジタル送信ビーム成形器。
- 前記デジタル送信ビーム成形器が、アレイド超音波振動子と動作可能に接続されるように構成され、前記アレイド超音波振動子が、線形アレイ振動子、位相アレイ振動子、二次元(2−D)アレイ振動子、および曲線アレイ振動子から成る群から選択される、請求項15に記載のデジタル送信ビーム成形器。
- 前記送信中心周波数が15MHz〜55MHzの範囲内にある、請求項15に記載のデジタル送信ビーム成形器。
- 前記ビットワードが16ビットワードである、請求項15に記載のデジタル送信ビーム成形器。
- 前記信号処理モジュールが、直交サンプリングを使用し、受信サンプリング周波数を有し、
前記信号処理ユニットが、前記受信サンプリング周波数が選択的に選択され得るように構成される、請求項1に記載の超音波イメージングシステム。 - 前記受信サンプリング周波数が、前記送信中心周波数とは異なる周波数で選択される、請求項20に記載の超音波イメージングシステム。
- 前記受信サンプリング周波数が、前記送信中心周波数と同じ周波数で選択される、請求項20に記載の超音波イメージングシステム。
- 前記デジタル送信ビーム成形器サブシステムが、さらに、前記受信サンプリング周波数が送信焦点深度に依存するように、前記送信焦点深度を含む、請求項20に記載の超音波イメージングシステム。
- 前記受信サンプリング周波数が、前記送信焦点深度が増加するにつれて減少する、請求項22に記載の超音波イメージングシステム。
- 前記アレイド超音波振動子が、小さくとも5.0ミリメートル(mm)の視野を有し、
前記信号処理ユニットが、前記アレイド超音波振動子から、毎秒小さくとも20フレーム(fps)のフレームレートで受信超音波信号を取得するように構成される、請求項1に記載の超音波イメージングシステム。 - 前記信号処理ユニットが、さらに、前記受信超音波信号から超音波画像を生成する、請求項25に記載のシステム。
- 前記受信超音波信号が、取得レートより低速の表示レートで前記超音波画像を生成するように、前記信号処理ユニットによって処理される、請求項26に記載のシステム。
- 前記生成された超音波画像の表示レートが100fps以下である、請求項27に記載のシステム。
- 前記生成された超音波画像の表示レートが30fps以下である、請求項27に記載のシステム。
- 前記超音波画像が、Bモード、Mモード、ドップラーモード、RFモード、3−Dモードから成る群から選択される超音波モードの前記信号処理ユニットによって生成される、請求項26に記載のシステム。
- 前記アレイド超音波振動子が、線形アレイ振動子、位相アレイ振動子、二次元(2−D)アレイ振動子、および曲線アレイ振動子から成る群から選択される、請求項25に記載のシステム。
- 前記アレイド超音波振動子が、前記アレイド超音波振動子の送信中心周波数における音の波長の2.0倍以下の素子ピッチを有する、請求項25に記載のシステム。
- 前記アレイド超音波振動子が、前記アレイド超音波振動子の送信中心周波数における音の波長の1.5倍以下の素子ピッチを有する、請求項25に記載のシステム。
- 前記フロントエンド電子回路モジュールが、さらに、送信回路および受信チャネルを備え、前記送信回路が、2つの電界効果トランジスタ(FET)を介して、中心タップ巻線を含む変換器に接続された送信電源電圧を備え、前記アレイド超音波振動子が前記変換器の二次巻線の第1端部に動作可能に接続され、前記受信チャネルに対する入力が前記変換器の前記二次巻線の第2端部に接続され、その結果、前記受信チャネルが信号を受信するときには、前記送信電源電圧が実質的にゼロに設定され、前記2つのFETに電源が投入され、前記送信回路が信号を送信するときには、前記変換器が送信信号を生成し、前記送信信号を前記アレイド超音波振動子に結合する、請求項25に記載のシステム。
- 前記フロントエンド電子回路モジュールが、さらに、各々の受信チャネルに2つ以上の信号サンプラを備える、請求項34に記載のシステム。
- 前記信号サンプラがアナログデジタル変換器である、請求項35に記載のシステム。
- 前記信号サンプラが直交サンプリングを使用して、受信信号をサンプリングする、請求項35に記載のシステム。
- 前記信号サンプラが、90°位相が外れたサンプリングクロックを備える、請求項37に記載のシステム。
- 前記サンプリングクロックが、受信超音波信号の前記中心周波数にほぼ等しい受信クロック期間を有する、請求項38に記載のシステム。
- 受信クロック期間未満の遅延分解能が、取得信号を処理するために使用される、請求項39に記載のシステム。
- 前記遅延分解能が、前記受信クロック期間の1/16である、請求項40に記載のシステム。
- 複数の素子を有する前記アレイド超音波振動子の各々の素子が、受信チャネルに動作可能に接続される、請求項25に記載のシステム。
- 複数の素子を有する前記アレイド超音波振動子の素子の数が、受信チャネルの数より多い、請求項42に記載のシステム。
- 複数の素子を有する前記アレイド超音波振動子が、少なくとも32個の受信チャネルに動作可能に接続される少なくとも64個の素子を備える、請求項42に記載のシステム。
- 複数の素子を有する前記アレイド超音波振動子が、64個の受信チャネルに動作可能に接続される256個の素子を備える、請求項42に記載のシステム。
- 複数の素子を有する前記アレイド超音波振動子が、128個の受信チャネルに動作可能に接続される256個の素子を備える、請求項42に記載のシステム。
- 複数の素子を有する前記アレイド超音波振動子が、256個の受信チャネルに動作可能に接続される256個の素子を備える、請求項42に記載のシステム。
- 複数の素子を有する前記アレイド超音波振動子が、256個の素子を備える、請求項42に記載のシステム。
- 512本の超音波ラインが生成され、前記被検体内に送信され、前記生成された超音波画像の各々のフレームごとに、前記被検体から受信される、請求項48に記載のシステム。
- 256本の超音波ラインが生成され、前記被検体内に送信され、前記生成された超音波画像の各々のフレームごとに、前記被検体から受信される、請求項48に記載のシステム。
- 少なくとも2本の超音波ラインが生成され、前記被検体内に送信され、前記生成された超音波画像の各々のフレームごとに、前記アレイの各々の素子において前記被検体から受信される、請求項25に記載のシステム。
- 1本の超音波ラインが生成され、前記被検体内に送信され、前記生成された超音波画像の各々のフレームごとに、前記アレイの各々の素子において前記被検体から受信される、請求項25に記載のシステム。
- 前記受信超音波信号が、毎秒小さくとも200フレーム数(fps)の取得レートで取得される、請求項52に記載のシステム。
- 複数の素子を有する前記アレイド超音波振動子の素子が、前記振動子の前記中心送信周波数の波長に等しい距離だけ分離される、請求項25に記載のシステム。
- 前記中心送信周波数が、15MHz、20MHz、30MHz、40MHz、50MHz、および55MHzから成る群から選択される、請求項54に記載のシステム。
- 複数の素子を有する前記アレイド超音波振動子の長さが前記振動子の視野に等しい、請求項25に記載のシステム。
- 前記受信超音波信号が、小さくとも200fpsのフレームレートで取得される、請求項25に記載のシステム。
- 前記受信超音波信号が、100fps〜200fpsの範囲内のフレームレートで取得される、請求項25に記載のシステム。
- 前記超音波画像が、150ミクロン(μm)以下の方位分解能を有する、請求項25に記載のシステム。
- 前記超音波画像が、75ミクロン(μm)以下の距離分解能を有する、請求項59に記載のシステム。
- 前記超音波画像が、30ミクロン(μm)以下の空間分解能を有する、請求項60に記載のシステム。
- 前記送信超音波信号が、1.0mm〜30.0mmの範囲内の深さで集束することが可能である、請求項25に記載のシステム。
- 前記送信超音波信号が、3.0mm〜10.0mmの範囲内の深さで集束することが可能である、請求項62に記載のシステム。
- 前記送信超音波信号が、2.0mm〜12.0mmの範囲内の深さで集束することが可能である、請求項62に記載のシステム。
- 前記送信超音波信号が、1.0mm〜6.0mmの範囲内の深さで集束することが可能である、請求項62に記載のシステム。
- 前記送信超音波信号が、3.0mm〜8.0mmの範囲内の深さで集束することが可能である、請求項62に記載のシステム。
- 前記送信超音波信号が、5.0mm〜18.0mmの範囲内の深さで集束することが可能である、請求項62に記載のシステム。
- 前記アレイド超音波振動子が、小さくとも500ヘルツ(Hz)のパルス繰返し周波数(PRF)における超音波を生成して被検体内に送信し、前記被検体から超音波を受信することが可能であり、前記アレイド超音波振動子が、小さくとも5.0ミリメートル(mm)の視野を有し、
前記システムが、さらに、カラーフロードップラー超音波画像を前記受信超音波から生成するための処理ユニットを備える、請求項1に記載のシステム。 - 前記アレイド超音波振動子が、線形アレイ振動子、位相アレイ振動子、二次元(2−D)アレイ振動子、および曲線アレイ振動子から成る群から選択される、請求項68に記載のシステム。
- 前記アレイド超音波振動子が、前記アレイド超音波振動子の送信中心周波数における音の波長の2倍以下の素子ピッチを有する、請求項68に記載のシステム。
- 前記PRFが500Hz〜75キロヘルツ(KHz)の範囲内にある、請求項68に記載のシステム。
- 前記アレイド超音波振動子が、小さくとも500ヘルツ(Hz)のパルス繰返し周波数(PRF)における超音波を生成して被検体内に送信することが可能であり、前記アレイド超音波振動子が、小さくとも5.0ミリメートル(mm)の視野を有し、
前記システムが、さらに、パルス波ドップラー超音波画像を前記受信超音波から生成するための処理ユニットを備える、請求項1に記載のシステム。 - 前記アレイド超音波振動子が、線形アレイ振動子、位相アレイ振動子、二次元(2−D)アレイ振動子、曲線アレイ振動子から成る群から選択される、請求項72に記載のシステム。
- 前記アレイド超音波振動子が、前記アレイド超音波振動子の送信中心周波数における音の波長の小さくとも2倍以下の素子ピッチを有する、請求項72に記載のシステム。
- 前記PRFが500Hz〜150KHzの範囲内にある、請求項72に記載のシステム。
- FPGA fcが、前記1つまたは複数のFPGAの動作可能な最高周波数である、請求項1に記載の超音波イメージングシステム。
- FPGA fcが、前記1つまたは複数のFPGAの動作可能な最高周波数である、請求項9に記載の信号処理ユニット。
- FPGA fcが、前記1つまたは複数のFPGAの動作可能な最高周波数である、請求項15に記載のデジタル送信ビーム成形器。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US73308905P | 2005-11-02 | 2005-11-02 | |
| US73309105P | 2005-11-02 | 2005-11-02 | |
| US60/733,091 | 2005-11-02 | ||
| US60/733,089 | 2005-11-02 | ||
| PCT/US2006/042891 WO2007056104A2 (en) | 2005-11-02 | 2006-11-02 | High frequency array ultrasound system |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013204411A Division JP5690900B2 (ja) | 2005-11-02 | 2013-09-30 | 高周波数アレイ超音波システム |
| JP2014147355A Division JP2014210201A (ja) | 2005-11-02 | 2014-07-18 | 高周波数アレイ超音波システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009514600A JP2009514600A (ja) | 2009-04-09 |
| JP5630958B2 true JP5630958B2 (ja) | 2014-11-26 |
Family
ID=37865774
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008539044A Expired - Fee Related JP5630958B2 (ja) | 2005-11-02 | 2006-11-02 | 高周波数アレイ超音波システム |
| JP2013204411A Active JP5690900B2 (ja) | 2005-11-02 | 2013-09-30 | 高周波数アレイ超音波システム |
| JP2014147355A Withdrawn JP2014210201A (ja) | 2005-11-02 | 2014-07-18 | 高周波数アレイ超音波システム |
| JP2016205684A Withdrawn JP2017035528A (ja) | 2005-11-02 | 2016-10-20 | 高周波数アレイ超音波システム |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013204411A Active JP5690900B2 (ja) | 2005-11-02 | 2013-09-30 | 高周波数アレイ超音波システム |
| JP2014147355A Withdrawn JP2014210201A (ja) | 2005-11-02 | 2014-07-18 | 高周波数アレイ超音波システム |
| JP2016205684A Withdrawn JP2017035528A (ja) | 2005-11-02 | 2016-10-20 | 高周波数アレイ超音波システム |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US7901358B2 (ja) |
| EP (1) | EP1952175B1 (ja) |
| JP (4) | JP5630958B2 (ja) |
| CN (1) | CN101351724B (ja) |
| CA (2) | CA2935422C (ja) |
| ES (1) | ES2402741T3 (ja) |
| HK (1) | HK1129243A1 (ja) |
| WO (1) | WO2007056104A2 (ja) |
Families Citing this family (184)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8213467B2 (en) * | 2004-04-08 | 2012-07-03 | Sonosite, Inc. | Systems and methods providing ASICs for use in multiple applications |
| EP1738407B1 (en) | 2004-04-20 | 2014-03-26 | Visualsonics Inc. | Arrayed ultrasonic transducer |
| WO2006044997A2 (en) * | 2004-10-15 | 2006-04-27 | The Trustees Of Columbia University In The City Of New York | System and method for localized measurement and imaging of viscosity of tissues |
| US10687785B2 (en) | 2005-05-12 | 2020-06-23 | The Trustees Of Columbia Univeristy In The City Of New York | System and method for electromechanical activation of arrhythmias |
| US8858441B2 (en) * | 2005-05-12 | 2014-10-14 | The Trustees Of Columbia University In The City Of New York | System and method for electromechanical wave imaging of body structures |
| US10219815B2 (en) | 2005-09-22 | 2019-03-05 | The Regents Of The University Of Michigan | Histotripsy for thrombolysis |
| EP1952175B1 (en) | 2005-11-02 | 2013-01-09 | Visualsonics, Inc. | Digital transmit beamformer for an arrayed ultrasound transducer system |
| US8275449B2 (en) * | 2005-11-11 | 2012-09-25 | Visualsonics Inc. | Overlay image contrast enhancement |
| WO2007067987A2 (en) * | 2005-12-09 | 2007-06-14 | The Trustees Of Columbia University In The City Ofnew York | Systems and methods for elastography imaging |
| US8473239B2 (en) | 2009-04-14 | 2013-06-25 | Maui Imaging, Inc. | Multiple aperture ultrasound array alignment fixture |
| US7750536B2 (en) | 2006-03-02 | 2010-07-06 | Visualsonics Inc. | High frequency ultrasonic transducer and matching layer comprising cyanoacrylate |
| WO2007134051A2 (en) * | 2006-05-08 | 2007-11-22 | The Penn State Research Foundation | High frequency ultrasound transducers |
| US8529452B2 (en) | 2006-06-02 | 2013-09-10 | Sandra Donnelly | Ultrasonic evaluation of venous structures |
| US8150128B2 (en) * | 2006-08-30 | 2012-04-03 | The Trustees Of Columbia University In The City Of New York | Systems and method for composite elastography and wave imaging |
| WO2008051639A2 (en) | 2006-10-25 | 2008-05-02 | Maui Imaging, Inc. | Method and apparatus to produce ultrasonic images using multiple apertures |
| US20080114251A1 (en) * | 2006-11-10 | 2008-05-15 | Penrith Corporation | Transducer array imaging system |
| US8490489B2 (en) | 2006-11-10 | 2013-07-23 | Siemens Medical Solutions Usa, Inc. | Transducer array imaging system |
| US8499634B2 (en) * | 2006-11-10 | 2013-08-06 | Siemens Medical Solutions Usa, Inc. | Transducer array imaging system |
| US9295444B2 (en) | 2006-11-10 | 2016-03-29 | Siemens Medical Solutions Usa, Inc. | Transducer array imaging system |
| US8312771B2 (en) | 2006-11-10 | 2012-11-20 | Siemens Medical Solutions Usa, Inc. | Transducer array imaging system |
| CN101185580A (zh) * | 2006-11-15 | 2008-05-28 | 深圳迈瑞生物医疗电子股份有限公司 | 超声诊断系统高速射频回波数据采集方法和装置 |
| US8147409B2 (en) * | 2007-03-29 | 2012-04-03 | Supertex, Inc. | Method and apparatus for transducer excitation in medical ultrasound imaging |
| US7673274B2 (en) * | 2007-04-19 | 2010-03-02 | L3 Communications Integrated Systems, LP | Datapipe interpolation device |
| US7717154B2 (en) * | 2007-06-22 | 2010-05-18 | Li-Ming Cheng | Window coverings |
| JP2009005802A (ja) * | 2007-06-27 | 2009-01-15 | Ge Medical Systems Global Technology Co Llc | 超音波撮像装置 |
| ATE512375T1 (de) * | 2007-07-13 | 2011-06-15 | Ezono Ag | Optoelektrischer ultraschallsensor und -system |
| WO2009042867A1 (en) * | 2007-09-27 | 2009-04-02 | University Of Southern California | High frequency ultrasonic convex array transducers and tissue imaging |
| US9282945B2 (en) * | 2009-04-14 | 2016-03-15 | Maui Imaging, Inc. | Calibration of ultrasound probes |
| JP5555416B2 (ja) * | 2007-10-25 | 2014-07-23 | 三星メディソン株式会社 | 超音波診断装置及びスキャンラインデータ形成方法 |
| JP2009219794A (ja) * | 2008-03-18 | 2009-10-01 | Olympus Medical Systems Corp | 超音波診断装置 |
| WO2011035312A1 (en) | 2009-09-21 | 2011-03-24 | The Trustees Of Culumbia University In The City Of New York | Systems and methods for opening of a tissue barrier |
| EP2285287B1 (en) | 2008-04-22 | 2015-04-01 | eZono AG | Ultrasound imaging system and method for providing assistance in an ultrasound imaging system |
| WO2010014977A1 (en) * | 2008-08-01 | 2010-02-04 | The Trustees Of Columbia University In The City Of New York | Systems and methods for matching and imaging tissue characteristics |
| US8602993B2 (en) | 2008-08-08 | 2013-12-10 | Maui Imaging, Inc. | Imaging with multiple aperture medical ultrasound and synchronization of add-on systems |
| CA2734768C (en) * | 2008-08-18 | 2017-06-27 | University Of Virginia Patent Foundation | Front end circuitry for imaging systems and methods of use |
| WO2010030819A1 (en) | 2008-09-10 | 2010-03-18 | The Trustees Of Columbia University In The City Of New York | Systems and methods for opening a tissue |
| JP5723775B2 (ja) * | 2008-09-18 | 2015-05-27 | ビジュアルソニックス インコーポレイテッド | 超音波変換器および他の構成要素の製造方法 |
| US9184369B2 (en) | 2008-09-18 | 2015-11-10 | Fujifilm Sonosite, Inc. | Methods for manufacturing ultrasound transducers and other components |
| US9173047B2 (en) | 2008-09-18 | 2015-10-27 | Fujifilm Sonosite, Inc. | Methods for manufacturing ultrasound transducers and other components |
| US20100171395A1 (en) * | 2008-10-24 | 2010-07-08 | University Of Southern California | Curved ultrasonic array transducers |
| WO2010055819A1 (ja) * | 2008-11-14 | 2010-05-20 | 株式会社 日立メディコ | 超音波診断装置及び超音波画像生成方法 |
| FR2938918B1 (fr) * | 2008-11-21 | 2011-02-11 | Commissariat Energie Atomique | Procede et dispositif d'analyse acoustique de microporosites dans un materiau tel que le beton a l'aide d'une pluralite de transducteurs cmuts incorpores dans le materiau |
| US8676290B2 (en) | 2010-05-11 | 2014-03-18 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Multi-directional catheter control handle |
| US8556850B2 (en) | 2008-12-31 | 2013-10-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Shaft and handle for a catheter with independently-deflectable segments |
| US8781201B2 (en) * | 2009-03-04 | 2014-07-15 | Robert E. Sandstrom | Method of operating a pathology laboratory |
| WO2010120913A2 (en) * | 2009-04-14 | 2010-10-21 | Maui Imaging, Inc. | Universal multiple aperture medical ultrasound probe |
| WO2010121265A1 (en) * | 2009-04-17 | 2010-10-21 | Visualsonics Inc. | A method for nonlinear imaging of ultrasound contrast agents at high frequencies |
| US8157738B2 (en) * | 2009-06-02 | 2012-04-17 | Samplify Systems, Inc. | Ultrasound signal compression |
| CN101601594B (zh) * | 2009-07-08 | 2012-01-18 | 汕头市超声仪器研究所有限公司 | 一种医用b超前端激励方法 |
| JP5652395B2 (ja) * | 2009-09-28 | 2015-01-14 | コニカミノルタ株式会社 | 超音波診断装置 |
| TW201115409A (en) * | 2009-10-29 | 2011-05-01 | Hannspree Inc | A mouse capable of generating vapor |
| US20130338498A1 (en) * | 2009-11-02 | 2013-12-19 | Board Of Regents, The University Of Texas System | Catheter for Intravascular Ultrasound and Photoacoustic Imaging |
| US9649089B2 (en) * | 2009-11-17 | 2017-05-16 | B-K Medical Aps | Portable ultrasound scanner and docking system |
| KR102121040B1 (ko) | 2010-02-18 | 2020-06-09 | 마우이 이미징, 인코포레이티드 | 초음파 이미지를 구성하는 방법 및 이를 위한 다중-개구 초음파 이미징 시스템 |
| US8439840B1 (en) * | 2010-05-04 | 2013-05-14 | Sonosite, Inc. | Ultrasound imaging system and method with automatic adjustment and/or multiple sample volumes |
| US9289147B2 (en) | 2010-05-11 | 2016-03-22 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Multi-directional flexible wire harness for medical devices |
| WO2011148275A1 (en) * | 2010-05-26 | 2011-12-01 | Koninklijke Philips Electronics N.V. | High volume rate 3d ultrasonic diagnostic imaging of the heart |
| CN102917648B (zh) * | 2010-05-26 | 2015-05-20 | 皇家飞利浦电子股份有限公司 | 高体积速率3d 超声诊断成像 |
| EP3406299B1 (en) | 2010-06-09 | 2021-08-04 | Regents of the University of Minnesota | Dual mode ultrasound transducer (dmut) system for controlling delivery of ultrasound therapy |
| WO2011163475A1 (en) * | 2010-06-23 | 2011-12-29 | Lyric Semiconductor, Inc. | Ultrasound imaging with analog processing |
| US9513368B2 (en) * | 2010-06-30 | 2016-12-06 | General Electric Company | Method and system for ultrasound data processing |
| WO2012051305A2 (en) | 2010-10-13 | 2012-04-19 | Mau Imaging, Inc. | Multiple aperture probe internal apparatus and cable assemblies |
| EP3563768A3 (en) | 2010-10-13 | 2020-02-12 | Maui Imaging, Inc. | Concave ultrasound transducers and 3d arrays |
| CN101972154A (zh) * | 2010-11-22 | 2011-02-16 | 中国医学科学院生物医学工程研究所 | 一种用于高频超声诊断设备中的超声波发射系统 |
| CN102109601B (zh) * | 2010-12-06 | 2013-07-10 | 王茂森 | 一种声纳相机 |
| CN102551791B (zh) | 2010-12-17 | 2016-04-27 | 深圳迈瑞生物医疗电子股份有限公司 | 一种超声成像方法和装置 |
| CA2832689A1 (en) | 2011-04-14 | 2012-10-18 | Regents Of The University Of Minnesota | Vascular characterization using ultrasound imaging |
| US9320491B2 (en) | 2011-04-18 | 2016-04-26 | The Trustees Of Columbia University In The City Of New York | Ultrasound devices methods and systems |
| USD726905S1 (en) | 2011-05-11 | 2015-04-14 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Control handle for a medical device |
| WO2012162664A1 (en) | 2011-05-26 | 2012-11-29 | The Trustees Of Columbia University In The City Of New York | Systems and methods for opening of a tissue barrier in primates |
| US9775585B2 (en) * | 2011-06-15 | 2017-10-03 | Toshiba Medical Systems Corporation | Variable power saving processing scheme for ultrasound beamformer functionality |
| CN103033807B (zh) * | 2011-09-30 | 2014-12-10 | 中国科学院声学研究所 | 一种便携式超声成像系统接收前端装置 |
| US20130093901A1 (en) * | 2011-10-18 | 2013-04-18 | Riverside Research Institute | Synthetic-focusing strategies for real-time annular-array imaging |
| US20150196279A1 (en) * | 2011-10-18 | 2015-07-16 | Riverside Research Institute | Synthetic-focusing strategies for real-time annular-array imaging |
| TWI440878B (zh) * | 2011-10-27 | 2014-06-11 | Ind Tech Res Inst | 超音波接收模組、方法及系統 |
| DK2771712T3 (da) | 2011-10-28 | 2023-06-26 | Decision Sciences Int Corp | Kodede bølgeformer med spredt spektrum i ultralydsbilleder |
| TW201336478A (zh) | 2011-12-01 | 2013-09-16 | Maui Imaging Inc | 使用以回音為基及多孔徑都卜勒超音波之移動偵測 |
| US9482748B2 (en) * | 2011-12-12 | 2016-11-01 | Super Sonic Imagine | Ultrasound imaging system, and a processing device used inside said ultrasound imaging system |
| DE102011088346B4 (de) | 2011-12-13 | 2022-01-05 | Robert Bosch Gmbh | Vorrichtung zur Erfassung akustischer Signale sowie dazugehöriges Verfahren |
| KR20140107648A (ko) | 2011-12-29 | 2014-09-04 | 마우이 이미징, 인코포레이티드 | 임의의 경로들의 m-모드 초음파 이미징 |
| WO2013126559A1 (en) | 2012-02-21 | 2013-08-29 | Maui Imaging, Inc. | Determining material stiffness using multiple aperture ultrasound |
| CN103284753B (zh) * | 2012-02-22 | 2015-12-09 | 香港理工大学 | 超声波成像系统及成像方法 |
| US20130242493A1 (en) * | 2012-03-13 | 2013-09-19 | Qualcomm Mems Technologies, Inc. | Low cost interposer fabricated with additive processes |
| JP6399999B2 (ja) | 2012-03-26 | 2018-10-03 | マウイ イマギング,インコーポレーテッド | 重み付け係数を適用することによって超音波画像の質を改善するためのシステム及び方法 |
| EP2809236B1 (en) * | 2012-04-09 | 2019-12-11 | St. Jude Medical Atrial Fibrillation Division, Inc. | System comprising a medical device and a pair of wire harnesses |
| ES2525600B1 (es) * | 2012-05-25 | 2015-11-06 | Consejo Superior De Investigaciones Científicas (Csic) | Método para el control en tiempo real del enfoque dinámico en sistemas de imagen ultrasónica y dispositivo calculador de adelanto de muestreo asociado al mismo |
| CN105726064B (zh) * | 2012-07-31 | 2019-06-11 | 东芝医疗系统株式会社 | 超声波诊断装置以及控制方法 |
| CN104620128B (zh) | 2012-08-10 | 2017-06-23 | 毛伊图像公司 | 多孔径超声探头的校准 |
| EP3893022A1 (en) | 2012-08-21 | 2021-10-13 | Maui Imaging, Inc. | Ultrasound imaging system memory architecture |
| WO2014059170A1 (en) | 2012-10-10 | 2014-04-17 | The Trustees Of Columbia University In The City Of New York | Systems and methods for mechanical mapping of cardiac rhythm |
| EP2938268B1 (en) * | 2012-12-28 | 2022-11-30 | Philips Image Guided Therapy Corporation | Synthetic aperture image reconstruction system in a patient interface module (pim) |
| US9717141B1 (en) * | 2013-01-03 | 2017-07-25 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Flexible printed circuit with removable testing portion |
| US9232933B2 (en) * | 2013-02-01 | 2016-01-12 | Kabushiki Kaisha Toshiba | Transformer-based multiplexer for ultrasound imaging system and method |
| WO2014160291A1 (en) | 2013-03-13 | 2014-10-02 | Maui Imaging, Inc. | Alignment of ultrasound transducer arrays and multiple aperture probe assembly |
| US9211110B2 (en) | 2013-03-15 | 2015-12-15 | The Regents Of The University Of Michigan | Lung ventillation measurements using ultrasound |
| US20140276197A1 (en) * | 2013-03-15 | 2014-09-18 | Greer Laboratories, Inc. | Apparatus and method for determining treatment endpoints for allergen testing |
| CN103175900B (zh) * | 2013-03-19 | 2016-02-17 | 中国科学院声学研究所 | 一种相控阵无损探伤装置和系统 |
| WO2014194291A2 (en) | 2013-05-31 | 2014-12-04 | eagleyemed, Inc. | Ultrasound image enhancement and super-resolution |
| US9247921B2 (en) | 2013-06-07 | 2016-02-02 | The Trustees Of Columbia University In The City Of New York | Systems and methods of high frame rate streaming for treatment monitoring |
| EP3025166B1 (en) | 2013-07-23 | 2020-06-17 | Regents of the University of Minnesota | Ultrasound image formation and/or reconstruction using multiple frequency waveforms |
| US10322178B2 (en) | 2013-08-09 | 2019-06-18 | The Trustees Of Columbia University In The City Of New York | Systems and methods for targeted drug delivery |
| WO2015027164A1 (en) | 2013-08-22 | 2015-02-26 | The Regents Of The University Of Michigan | Histotripsy using very short ultrasound pulses |
| US10028723B2 (en) | 2013-09-03 | 2018-07-24 | The Trustees Of Columbia University In The City Of New York | Systems and methods for real-time, transcranial monitoring of blood-brain barrier opening |
| US9844359B2 (en) | 2013-09-13 | 2017-12-19 | Decision Sciences Medical Company, LLC | Coherent spread-spectrum coded waveforms in synthetic aperture image formation |
| US9883848B2 (en) | 2013-09-13 | 2018-02-06 | Maui Imaging, Inc. | Ultrasound imaging using apparent point-source transmit transducer |
| JP6223783B2 (ja) * | 2013-11-07 | 2017-11-01 | 三菱日立パワーシステムズ株式会社 | 超音波探傷センサおよび超音波探傷方法 |
| WO2015106027A1 (en) * | 2014-01-08 | 2015-07-16 | Klock John C | Quantitative transmission ultrasound imaging of dense anatomical structures |
| US10265047B2 (en) | 2014-03-12 | 2019-04-23 | Fujifilm Sonosite, Inc. | High frequency ultrasound transducer having an ultrasonic lens with integral central matching layer |
| CN104013439A (zh) * | 2014-05-05 | 2014-09-03 | 苏州森斯凌传感技术有限公司 | 基于电压校准的超声波叠加检测系统 |
| KR102617888B1 (ko) | 2014-08-18 | 2023-12-22 | 마우이 이미징, 인코포레이티드 | 네트워크-기반 초음파 이미징 시스템 |
| US9945946B2 (en) | 2014-09-11 | 2018-04-17 | Microsoft Technology Licensing, Llc | Ultrasonic depth imaging |
| JP6734270B2 (ja) * | 2014-10-30 | 2020-08-05 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 超音波画像を形成する際の圧縮センシング |
| US10548571B1 (en) | 2014-11-21 | 2020-02-04 | Ultrasee Corp | Fast 2D blood flow velocity imaging |
| US10989810B2 (en) * | 2015-01-23 | 2021-04-27 | Dalhousie University | Systems and methods for beamforming using variable sampling |
| KR102387708B1 (ko) | 2015-01-30 | 2022-04-19 | 삼성메디슨 주식회사 | 향상된 hprf 도플러 영상을 위한 가이드를 제공하는 방법 및 초음파 시스템 |
| KR20160097862A (ko) * | 2015-02-10 | 2016-08-18 | 삼성전자주식회사 | 휴대용 초음파 장치 및 그 제어방법 |
| KR20180096493A (ko) | 2015-02-25 | 2018-08-29 | 디시전 사이선씨즈 메디컬 컴패니, 엘엘씨 | 음향 신호 전송 접촉매질 및 결합 매체 |
| WO2016149427A1 (en) * | 2015-03-18 | 2016-09-22 | Decision Sciences Medical Company, LLC | Synthetic aperture ultrasound system |
| TWI536015B (zh) * | 2015-03-24 | 2016-06-01 | 佳世達科技股份有限公司 | 超音波掃描系統及超音波掃描方法 |
| US9251781B1 (en) | 2015-04-06 | 2016-02-02 | King Saud University | Pulser logic method and system for an ultrasound beamformer |
| US9995638B2 (en) * | 2015-04-30 | 2018-06-12 | National Instruments Corporation | Cold-junction-compensated input terminal of a thermocouple instrument |
| US10020783B2 (en) | 2015-07-01 | 2018-07-10 | Bei Electronics Llc | Class D amplifier using Fs/4 modulation and envelope tracking power supplies |
| EP3278718A4 (en) | 2015-08-07 | 2019-01-23 | Olympus Corporation | IMAGING DEVICE |
| US10413274B2 (en) * | 2015-09-02 | 2019-09-17 | Ningbo Marvoto Intelligent Technology Co., Ltd | Method for controlling wireless intelligent ultrasound fetal imaging system |
| CN105030280B (zh) * | 2015-09-02 | 2019-03-05 | 宁波美童智能科技有限公司 | 一种无线智能超声胎儿成像系统 |
| JP6755308B2 (ja) | 2015-10-08 | 2020-09-16 | ディスィジョン サイエンシズ メディカル カンパニー,エルエルシー | 音響式整形外科的追跡システムおよび方法 |
| US10813624B2 (en) * | 2015-10-30 | 2020-10-27 | Carestream Health, Inc. | Ultrasound display method |
| KR20180081529A (ko) * | 2015-11-25 | 2018-07-16 | 후지필름 소노사이트, 인크. | 고주파 초음파 트랜스듀서 어레이를 포함하는 의료 기기 |
| CN108348219B (zh) * | 2015-11-25 | 2021-04-30 | 富士胶片索诺声公司 | 高频超音波换能器以及用于制造的方法 |
| CN108778530B (zh) | 2016-01-27 | 2021-07-27 | 毛伊图像公司 | 具有稀疏阵列探测器的超声成像 |
| US20170307755A1 (en) | 2016-04-20 | 2017-10-26 | YoR Labs | Method and System for Determining Signal Direction |
| WO2017184181A1 (en) | 2016-04-22 | 2017-10-26 | Chirp Micro, Inc. | Ultrasonic input device |
| US10132924B2 (en) * | 2016-04-29 | 2018-11-20 | R2Sonic, Llc | Multimission and multispectral sonar |
| US10401492B2 (en) * | 2016-05-31 | 2019-09-03 | yoR Labs, Inc. | Methods and systems for phased array returning wave front segmentation |
| EP3518781A4 (en) * | 2016-09-28 | 2020-06-17 | Covidien LP | SYSTEM AND METHOD FOR PARALLELIZING CPU AND GPU PROCESSING FOR ULTRASONIC IMAGING DEVICES |
| JP2019532724A (ja) * | 2016-09-29 | 2019-11-14 | イグザクト・イメージング・インコーポレイテッドExact Imaging Inc. | 超音波撮像デバイスのための信号処理経路 |
| WO2018065254A1 (en) * | 2016-10-03 | 2018-04-12 | Koninklijke Philips N.V. | Intraluminal imaging devices with a reduced number of signal channels |
| JP6822078B2 (ja) * | 2016-11-08 | 2021-01-27 | コニカミノルタ株式会社 | 超音波診断装置の制御装置、及び制御方法 |
| CN109982643B (zh) * | 2016-11-14 | 2023-07-14 | 皇家飞利浦有限公司 | 用于解剖结构、功能和血液动力学成像的三模式超声成像 |
| JP7090609B2 (ja) * | 2016-11-17 | 2022-06-24 | コーニンクレッカ フィリップス エヌ ヴェ | ツインクリングアーチファクトを使用して腎臓結石を検出する超音波システム及び方法 |
| EP3336485B1 (en) | 2016-12-15 | 2020-09-23 | Safran Landing Systems UK Limited | Aircraft assembly including deflection sensor |
| US11372094B2 (en) * | 2017-05-11 | 2022-06-28 | Koninklijke Philips N.V. | Reverberation artifact cancellation in ultrasonic diagnostic images |
| JP6933016B2 (ja) * | 2017-06-22 | 2021-09-08 | コニカミノルタ株式会社 | 放射線画像撮影システム |
| EP3435116A1 (en) | 2017-07-24 | 2019-01-30 | Koninklijke Philips N.V. | An ultrasound probe and processing method |
| CN109381218B (zh) * | 2017-08-04 | 2021-08-20 | 香港理工大学深圳研究院 | 一种三维超声成像方法及装置 |
| CN107566029B (zh) * | 2017-08-28 | 2020-04-28 | 西南电子技术研究所(中国电子科技集团公司第十研究所) | 空间网络按需接入系统 |
| TWI743411B (zh) * | 2017-11-08 | 2021-10-21 | 美商富士膠片索諾聲公司 | 具有高頻細節的超音波系統 |
| US11458337B2 (en) | 2017-11-28 | 2022-10-04 | Regents Of The University Of Minnesota | Adaptive refocusing of ultrasound transducer arrays using image data |
| EP3720349A4 (en) * | 2017-12-04 | 2021-01-20 | Bard Access Systems, Inc. | SYSTEMS AND METHODS FOR VISUALIZATION OF ANATOMY, LOCATION OF MEDICAL DEVICES, OR POSITIONING OF MEDICAL DEVICES |
| CN110095778B (zh) * | 2018-01-29 | 2021-05-28 | 中国石油天然气股份有限公司 | 储罐缺陷检测装置、系统及方法 |
| US11596812B2 (en) | 2018-04-06 | 2023-03-07 | Regents Of The University Of Minnesota | Wearable transcranial dual-mode ultrasound transducers for neuromodulation |
| CN108924353A (zh) * | 2018-06-29 | 2018-11-30 | 努比亚技术有限公司 | 抗干扰方法、移动终端和计算机可读存储介质 |
| CN108924955B (zh) * | 2018-07-30 | 2021-12-14 | 山东大骋医疗科技有限公司 | 一种基于双链无线通信的ct数据传输与控制方法及装置 |
| KR20200020183A (ko) * | 2018-08-16 | 2020-02-26 | 삼성메디슨 주식회사 | 빔포밍 장치, 빔포밍 장치의 제어방법 및 초음파 진단 장치 |
| CN111050060B (zh) | 2018-10-12 | 2021-08-31 | 华为技术有限公司 | 一种应用于终端设备的对焦方法、装置和终端设备 |
| US11813484B2 (en) | 2018-11-28 | 2023-11-14 | Histosonics, Inc. | Histotripsy systems and methods |
| CN113646832A (zh) * | 2019-01-15 | 2021-11-12 | 艾科索成像公司 | 用于超声成像系统的合成透镜 |
| CN109814110B (zh) * | 2019-02-21 | 2022-05-17 | 哈尔滨工程大学 | 深海长基线定位阵形拓扑结构的布阵方法 |
| TWI706641B (zh) * | 2019-03-06 | 2020-10-01 | 奔騰智慧生醫股份有限公司 | 具備多線波束與微波束成形的系統架構與處理方法 |
| US11464486B2 (en) | 2019-03-19 | 2022-10-11 | Shenzhen Mindray Bio-Medical Electronics Co., Ltd. | Wireless transducer charging for handheld ultrasound systems |
| CN110037741B (zh) * | 2019-04-08 | 2024-02-20 | 深圳市贝斯曼精密仪器有限公司 | 血流速度检测系统 |
| WO2020219705A1 (en) | 2019-04-23 | 2020-10-29 | Allan Wegner | Semi-rigid acoustic coupling articles for ultrasound diagnostic and treatment applications |
| US11032167B2 (en) * | 2019-06-14 | 2021-06-08 | Apple Inc. | Precursor rejection filter |
| CN110327077B (zh) * | 2019-07-09 | 2022-04-15 | 深圳开立生物医疗科技股份有限公司 | 一种血流显示方法、装置及超声设备和存储介质 |
| JP7118280B2 (ja) * | 2019-07-26 | 2022-08-15 | 富士フイルム株式会社 | 超音波診断装置および超音波診断装置の制御方法 |
| KR102335321B1 (ko) * | 2019-12-10 | 2021-12-08 | 한국과학기술연구원 | 탈부착 가능한 회로보드를 이용하여 복수의 기능들을 구현하는 초음파 치료 및 진단 장치 |
| AU2021213168A1 (en) | 2020-01-28 | 2022-09-01 | The Regents Of The University Of Michigan | Systems and methods for histotripsy immunosensitization |
| US11493979B2 (en) * | 2020-02-27 | 2022-11-08 | Fujifilm Sonosite, Inc. | Dynamic power reduction technique for ultrasound systems |
| US11547386B1 (en) | 2020-04-02 | 2023-01-10 | yoR Labs, Inc. | Method and apparatus for multi-zone, multi-frequency ultrasound image reconstruction with sub-zone blending |
| US10877124B1 (en) * | 2020-06-23 | 2020-12-29 | Charles A Uzes | System for receiving communications |
| CN111983629B (zh) * | 2020-08-14 | 2024-03-26 | 西安应用光学研究所 | 一种线阵信号目标提取装置及提取方法 |
| US11832991B2 (en) | 2020-08-25 | 2023-12-05 | yoR Labs, Inc. | Automatic ultrasound feature detection |
| US11344281B2 (en) | 2020-08-25 | 2022-05-31 | yoR Labs, Inc. | Ultrasound visual protocols |
| EP4243696A1 (en) | 2020-11-13 | 2023-09-20 | Decision Sciences Medical Company, LLC | Systems and methods for synthetic aperture ultrasound imaging of an object |
| US11704142B2 (en) | 2020-11-19 | 2023-07-18 | yoR Labs, Inc. | Computer application with built in training capability |
| US11751850B2 (en) | 2020-11-19 | 2023-09-12 | yoR Labs, Inc. | Ultrasound unified contrast and time gain compensation control |
| US11504093B2 (en) | 2021-01-22 | 2022-11-22 | Exo Imaging, Inc. | Equalization for matrix based line imagers for ultrasound imaging systems |
| US11683829B2 (en) * | 2021-05-31 | 2023-06-20 | Clarius Mobile Health Corp. | Systems and methods for improving quality of service when transmitting ultrasound image data over a wireless connection |
| EP4351447A1 (en) * | 2021-06-07 | 2024-04-17 | The Regents of The University of Michigan | All-in-one ultrasound systems and methods including histotripsy |
| WO2023039210A2 (en) * | 2021-09-13 | 2023-03-16 | Cloudstream Medical Imaging, Inc. | Ultrasound imaging using focusing beams for reducing mechanical index and thermal index |
| WO2023075756A1 (en) * | 2021-10-26 | 2023-05-04 | Exo Imaging, Inc. | Multi-transducer chip ultrasound device |
| US20230158438A1 (en) * | 2021-11-22 | 2023-05-25 | GE Precision Healthcare LLC | Method and system for automatically cleaning air filters of a medical imaging system |
| WO2023239913A1 (en) * | 2022-06-09 | 2023-12-14 | Bfly Operations, Inc. | Point of care ultrasound interface |
| US11881875B1 (en) | 2022-08-25 | 2024-01-23 | Stmicroelectronics S.R.L. | Waveform generator using a waveform coding scheme for both long states and toggle states |
Family Cites Families (219)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US53748A (en) | 1866-04-03 | Improved water-can for railroad-cars | ||
| US53653A (en) | 1866-04-03 | Improvement in harvester-rakes | ||
| US683168A (en) | 1900-12-14 | 1901-09-24 | William V Bleha | Hat-hanger. |
| US683870A (en) | 1901-01-17 | 1901-10-01 | James O Wright | Dredge-bucket. |
| US736232A (en) | 1903-02-18 | 1903-08-11 | Cambridge Mfg Company | Golf-ball. |
| US2205169A (en) | 1937-05-06 | 1940-06-18 | Hallman Abram | Signal structure |
| US3922572A (en) | 1974-08-12 | 1975-11-25 | Us Navy | Electroacoustical transducer |
| US4217684A (en) | 1979-04-16 | 1980-08-19 | General Electric Company | Fabrication of front surface matched ultrasonic transducer array |
| US4385255A (en) | 1979-11-02 | 1983-05-24 | Yokogawa Electric Works, Ltd. | Linear array ultrasonic transducer |
| JPS584640Y2 (ja) | 1979-11-02 | 1983-01-26 | 日立機電工業株式会社 | 多段式発酵槽に於ける各発酵室内の被発酵物落下状況検知装置 |
| FR2485858B1 (fr) * | 1980-06-25 | 1986-04-11 | Commissariat Energie Atomique | Procede de fabrication de transducteurs ultrasonores de formes complexes et application a l'obtention de transducteurs annulaires |
| US4360007A (en) | 1980-08-05 | 1982-11-23 | Yeda Research And Development Co., Ltd. | Remote controlled magnetic actuator particularly for an implantable device like a valve |
| DE3301967A1 (de) * | 1983-01-21 | 1984-07-26 | Siemens AG, 1000 Berlin und 8000 München | Ultraschallabbildungssystem |
| DE3435569A1 (de) | 1984-09-27 | 1986-04-10 | Siemens AG, 1000 Berlin und 8000 München | Verfahren zur herstellung einer array-ultraschall-antenne |
| US4802099A (en) | 1986-01-03 | 1989-01-31 | International Business Machines Corporation | Physical parameter balancing of circuit islands in integrated circuit wafers |
| US4809184A (en) * | 1986-10-22 | 1989-02-28 | General Electric Company | Method and apparatus for fully digital beam formation in a phased array coherent imaging system |
| US4841977A (en) * | 1987-05-26 | 1989-06-27 | Inter Therapy, Inc. | Ultra-thin acoustic transducer and balloon catheter using same in imaging array subassembly |
| DE3829999A1 (de) * | 1988-09-01 | 1990-03-15 | Schering Ag | Ultraschallverfahren und schaltungen zu deren durchfuehrung |
| US5410516A (en) | 1988-09-01 | 1995-04-25 | Schering Aktiengesellschaft | Ultrasonic processes and circuits for performing them |
| US5014710A (en) * | 1988-09-13 | 1991-05-14 | Acuson Corporation | Steered linear color doppler imaging |
| US5759791A (en) | 1989-01-17 | 1998-06-02 | The Johns Hopkins University | Cancer related antigen |
| EP0383972B1 (de) | 1989-02-22 | 1993-12-15 | Siemens Aktiengesellschaft | Ultraschall-Array mit trapezförmigen Schwingerelementen sowie Verfahren und Vorrichtung zu seiner Herstellung |
| US4945155A (en) | 1989-05-11 | 1990-07-31 | Eastman Kodak Company | Preparation of low color copoly(arylene sulfide) by heating copoly(arylene sulfide) |
| US5065068A (en) * | 1989-06-07 | 1991-11-12 | Oakley Clyde G | Ferroelectric ceramic transducer |
| EP0410020B1 (de) | 1989-07-24 | 1994-11-17 | Palitex Project-Company GmbH | Betriebsverfahren und Vorrichtung zum automatisierten Reinigen von Spulentöpfen und gegebenenfalls Ballonbegrenzern der Doppeldraht-Zwirnspindel einer Doppeldraht-Zwirnmaschine |
| US5014712A (en) * | 1989-12-26 | 1991-05-14 | General Electric Company | Coded excitation for transmission dynamic focusing of vibratory energy beam |
| US5160870A (en) | 1990-06-25 | 1992-11-03 | Carson Paul L | Ultrasonic image sensing array and method |
| US5123415A (en) | 1990-07-19 | 1992-06-23 | Advanced Technology Laboratories, Inc. | Ultrasonic imaging by radial scan of trapezoidal sector |
| US5445155A (en) * | 1991-03-13 | 1995-08-29 | Scimed Life Systems Incorporated | Intravascular imaging apparatus and methods for use and manufacture |
| DE4209394C2 (de) * | 1991-03-26 | 1996-07-18 | Hitachi Ltd | Ultraschallabbildungsgerät |
| GB2258364A (en) | 1991-07-30 | 1993-02-03 | Intravascular Res Ltd | Ultrasonic tranducer |
| US5704361A (en) * | 1991-11-08 | 1998-01-06 | Mayo Foundation For Medical Education And Research | Volumetric image ultrasound transducer underfluid catheter system |
| US5713363A (en) * | 1991-11-08 | 1998-02-03 | Mayo Foundation For Medical Education And Research | Ultrasound catheter and method for imaging and hemodynamic monitoring |
| US5325860A (en) | 1991-11-08 | 1994-07-05 | Mayo Foundation For Medical Education And Research | Ultrasonic and interventional catheter and method |
| US5186177A (en) * | 1991-12-05 | 1993-02-16 | General Electric Company | Method and apparatus for applying synthetic aperture focusing techniques to a catheter based system for high frequency ultrasound imaging of small vessels |
| DE4142372A1 (de) | 1991-12-20 | 1993-06-24 | Siemens Ag | Ultraschall-wandlerarray |
| US5203335A (en) * | 1992-03-02 | 1993-04-20 | General Electric Company | Phased array ultrasonic beam forming using oversampled A/D converters |
| US5318033A (en) * | 1992-04-17 | 1994-06-07 | Hewlett-Packard Company | Method and apparatus for increasing the frame rate and resolution of a phased array imaging system |
| US5311095A (en) | 1992-05-14 | 1994-05-10 | Duke University | Ultrasonic transducer array |
| US5744898A (en) | 1992-05-14 | 1998-04-28 | Duke University | Ultrasound transducer array with transmitter/receiver integrated circuitry |
| US5329496A (en) | 1992-10-16 | 1994-07-12 | Duke University | Two-dimensional array ultrasonic transducers |
| DE4226865A1 (de) | 1992-08-13 | 1994-03-10 | Siemens Ag | Ultraschalldiagnosegerät für die Dermatologie |
| US5368037A (en) | 1993-02-01 | 1994-11-29 | Endosonics Corporation | Ultrasound catheter |
| US20070016071A1 (en) | 1993-02-01 | 2007-01-18 | Volcano Corporation | Ultrasound transducer assembly |
| US5453575A (en) | 1993-02-01 | 1995-09-26 | Endosonics Corporation | Apparatus and method for detecting blood flow in intravascular ultrasonic imaging |
| US5369624A (en) * | 1993-03-26 | 1994-11-29 | Siemens Medical Systems, Inc. | Digital beamformer having multi-phase parallel processing |
| US5388079A (en) * | 1993-03-26 | 1995-02-07 | Siemens Medical Systems, Inc. | Partial beamforming |
| US5345426A (en) * | 1993-05-12 | 1994-09-06 | Hewlett-Packard Company | Delay interpolator for digital phased array ultrasound beamformers |
| US5465725A (en) | 1993-06-15 | 1995-11-14 | Hewlett Packard Company | Ultrasonic probe |
| US5460181A (en) | 1994-10-06 | 1995-10-24 | Hewlett Packard Co. | Ultrasonic transducer for three dimensional imaging |
| US5553035A (en) | 1993-06-15 | 1996-09-03 | Hewlett-Packard Company | Method of forming integral transducer and impedance matching layers |
| US5392259A (en) | 1993-06-15 | 1995-02-21 | Bolorforosh; Mir S. S. | Micro-grooves for the design of wideband clinical ultrasonic transducers |
| US5371717A (en) | 1993-06-15 | 1994-12-06 | Hewlett-Packard Company | Microgrooves for apodization and focussing of wideband clinical ultrasonic transducers |
| US5434827A (en) | 1993-06-15 | 1995-07-18 | Hewlett-Packard Company | Matching layer for front acoustic impedance matching of clinical ultrasonic tranducers |
| US5505088A (en) | 1993-08-27 | 1996-04-09 | Stellartech Research Corp. | Ultrasound microscope for imaging living tissues |
| US5415175A (en) | 1993-09-07 | 1995-05-16 | Acuson Corporation | Broadband phased array transducer design with frequency controlled two dimension capability and methods for manufacture thereof |
| US5792058A (en) | 1993-09-07 | 1998-08-11 | Acuson Corporation | Broadband phased array transducer with wide bandwidth, high sensitivity and reduced cross-talk and method for manufacture thereof |
| US5743855A (en) | 1995-03-03 | 1998-04-28 | Acuson Corporation | Broadband phased array transducer design with frequency controlled two dimension capability and methods for manufacture thereof |
| US5438998A (en) | 1993-09-07 | 1995-08-08 | Acuson Corporation | Broadband phased array transducer design with frequency controlled two dimension capability and methods for manufacture thereof |
| US5390674A (en) * | 1993-12-30 | 1995-02-21 | Advanced Technology Laboratories, Inc. | Ultrasonic imaging system with interpolated scan lines |
| DE19514307A1 (de) * | 1994-05-19 | 1995-11-23 | Siemens Ag | Duplexer für ein Ultraschallabbildungssystem |
| US5667373A (en) * | 1994-08-05 | 1997-09-16 | Acuson Corporation | Method and apparatus for coherent image formation |
| JPH10507936A (ja) * | 1994-08-05 | 1998-08-04 | アキュソン コーポレイション | 送信ビーム生成器システムのための方法及び装置 |
| US5685308A (en) * | 1994-08-05 | 1997-11-11 | Acuson Corporation | Method and apparatus for receive beamformer system |
| US6029116A (en) * | 1994-08-05 | 2000-02-22 | Acuson Corporation | Method and apparatus for a baseband processor of a receive beamformer system |
| US5522391A (en) * | 1994-08-09 | 1996-06-04 | Hewlett-Packard Company | Delay generator for phased array ultrasound beamformer |
| EP0696435A3 (en) | 1994-08-10 | 1997-03-12 | Hewlett Packard Co | Ultrasonic probe |
| US5544655A (en) * | 1994-09-16 | 1996-08-13 | Atlantis Diagnostics International, Llc | Ultrasonic multiline beamforming with interleaved sampling |
| US5655276A (en) | 1995-02-06 | 1997-08-12 | General Electric Company | Method of manufacturing two-dimensional array ultrasonic transducers |
| GB9504751D0 (en) * | 1995-03-09 | 1995-04-26 | Quality Medical Imaging Ltd | Apparatus for ultrasonic tissue investigation |
| DE19514308A1 (de) * | 1995-04-18 | 1996-10-24 | Siemens Ag | Ultraschallwandlerkopf mit integrierten steuerbaren Verstärkereinrichtungen |
| US5655538A (en) * | 1995-06-19 | 1997-08-12 | General Electric Company | Ultrasonic phased array transducer with an ultralow impedance backfill and a method for making |
| CN1189217A (zh) * | 1995-06-29 | 1998-07-29 | 垓技术公司 | 便携式超声成像系统 |
| US5573001A (en) * | 1995-09-08 | 1996-11-12 | Acuson Corporation | Ultrasonic receive beamformer with phased sub-arrays |
| US5706819A (en) * | 1995-10-10 | 1998-01-13 | Advanced Technology Laboratories, Inc. | Ultrasonic diagnostic imaging with harmonic contrast agents |
| US5629865A (en) | 1995-10-23 | 1997-05-13 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Pulse-echo ultrasonic imaging method for eliminating sample thickness variation effects |
| WO1997017018A1 (en) | 1995-11-09 | 1997-05-15 | Brigham & Women's Hospital | Aperiodic ultrasound phased array |
| GB9525418D0 (en) | 1995-12-13 | 1996-07-17 | Marconi Gec Ltd | Acoustic imaging arrays |
| US6236144B1 (en) | 1995-12-13 | 2001-05-22 | Gec-Marconi Limited | Acoustic imaging arrays |
| US5653236A (en) * | 1995-12-29 | 1997-08-05 | General Electric Company | Apparatus for real-time distributed computation of beamforming delays in ultrasound imaging system |
| JP3573567B2 (ja) * | 1996-04-12 | 2004-10-06 | 株式会社日立メディコ | 超音波探触子及びそれを用いた超音波検査装置 |
| US5704105A (en) | 1996-09-04 | 1998-01-06 | General Electric Company | Method of manufacturing multilayer array ultrasonic transducers |
| US5795297A (en) * | 1996-09-12 | 1998-08-18 | Atlantis Diagnostics International, L.L.C. | Ultrasonic diagnostic imaging system with personal computer architecture |
| US5879303A (en) * | 1996-09-27 | 1999-03-09 | Atl Ultrasound | Ultrasonic diagnostic imaging of response frequency differing from transmit frequency |
| US5865749A (en) | 1996-11-07 | 1999-02-02 | Data Sciences International, Inc. | Blood flow meter apparatus and method of use |
| US6626838B2 (en) | 1996-11-07 | 2003-09-30 | Transoma Medical, Inc. | Blood flow meter apparatus and method of use |
| US6530887B1 (en) * | 1996-12-24 | 2003-03-11 | Teratech Corporation | Ultrasound probe with integrated electronics |
| US5797847A (en) * | 1996-12-30 | 1998-08-25 | General Electric Company | Method and apparatus for complex bandpass filtering and decimation in ultrasound beamformer |
| US5844139A (en) * | 1996-12-30 | 1998-12-01 | General Electric Company | Method and apparatus for providing dynamically variable time delays for ultrasound beamformer |
| US5857974A (en) | 1997-01-08 | 1999-01-12 | Endosonics Corporation | High resolution intravascular ultrasound transducer assembly having a flexible substrate |
| US5940123A (en) * | 1997-02-13 | 1999-08-17 | Atl Ultrasound | High resolution ultrasonic imaging through interpolation of received scanline data |
| US5796207A (en) * | 1997-04-28 | 1998-08-18 | Rutgers, The State University Of New Jersey | Oriented piezo electric ceramics and ceramic/polymer composites |
| US5938612A (en) | 1997-05-05 | 1999-08-17 | Creare Inc. | Multilayer ultrasonic transducer array including very thin layer of transducer elements |
| US5906580A (en) * | 1997-05-05 | 1999-05-25 | Creare Inc. | Ultrasound system and method of administering ultrasound including a plurality of multi-layer transducer elements |
| US5897501A (en) * | 1997-05-07 | 1999-04-27 | General Electric Company | Imaging system with multiplexer for controlling a multi-row ultrasonic transducer array |
| US6074346A (en) * | 1997-06-27 | 2000-06-13 | Siemens Medical Systems, Inc. | Transmit/receive ultrasound front end circuit providing automatic transmit/receive switching |
| US6083164A (en) * | 1997-06-27 | 2000-07-04 | Siemens Medical Systems, Inc. | Ultrasound front-end circuit combining the transmitter and automatic transmit/receiver switch |
| US6050945A (en) * | 1997-06-27 | 2000-04-18 | Siemens Medical Systems, Inc. | Ultrasound front-end circuit combining the transmitter and automatic transmit/receive switch with agile power level control |
| JPH1147104A (ja) | 1997-08-08 | 1999-02-23 | Nippon Koden Corp | 患者監視装置 |
| US6128958A (en) * | 1997-09-11 | 2000-10-10 | The Regents Of The University Of Michigan | Phased array system architecture |
| US6586702B2 (en) * | 1997-09-25 | 2003-07-01 | Laser Electro Optic Application Technology Company | High density pixel array and laser micro-milling method for fabricating array |
| US6049159A (en) * | 1997-10-06 | 2000-04-11 | Albatros Technologies, Inc. | Wideband acoustic transducer |
| FR2772590B1 (fr) | 1997-12-18 | 2000-04-14 | Michel Puech | Utilisation d'un transducteur ultrasonore pour l'exploration echographique du segment posterieur du globe oculaire |
| US5905692A (en) * | 1997-12-31 | 1999-05-18 | Analogic Corporation | Digital ultrasound beamformer |
| US6262749B1 (en) * | 1997-12-31 | 2001-07-17 | Acuson Corporation | Ultrasonic system and method for data transfer, storage and/or processing |
| FR2773459B1 (fr) * | 1998-01-12 | 2000-04-14 | Centre Nat Rech Scient | Procede d'exploration et de visualisation de tissus d'origine humaine ou animale a partir d'une sonde ultrasonore a haute frequence |
| RU2210834C2 (ru) | 1998-01-28 | 2003-08-20 | Тин Филм Электроникс Аса | Способ формирования электропроводящих и/или полупроводниковых трехмерных структур, способ уничтожения этих структур и генератор/модулятор электрического поля для использования в способе формирования |
| US5977691A (en) | 1998-02-10 | 1999-11-02 | Hewlett-Packard Company | Element interconnections for multiple aperture transducers |
| JP3345580B2 (ja) | 1998-03-05 | 2002-11-18 | 株式会社東芝 | 超音波プローブの製造方法 |
| US6183578B1 (en) | 1998-04-21 | 2001-02-06 | Penn State Research Foundation | Method for manufacture of high frequency ultrasound transducers |
| WO1999056626A1 (en) * | 1998-05-05 | 1999-11-11 | Cornell Research Foundation, Inc. | Method for assessing blood flow and apparatus thereof |
| US5970025A (en) * | 1998-06-10 | 1999-10-19 | Acuson Corporation | Ultrasound beamformation integrated circuit and method |
| JP2000050391A (ja) | 1998-07-31 | 2000-02-18 | Olympus Optical Co Ltd | 超音波トランスデューサーおよびその製造方法 |
| US6001062A (en) | 1998-08-03 | 1999-12-14 | Scimed Life Systems, Inc. | Slewing bandpass filter for selective passage of time varying acoustic signals |
| AU1128600A (en) | 1998-11-20 | 2000-06-13 | Joie P. Jones | Methods for selectively dissolving and removing materials using ultra-high frequency ultrasound |
| US6193662B1 (en) | 1999-02-17 | 2001-02-27 | Atl Ultrasound | High frame rate pulse inversion harmonic ultrasonic diagnostic imaging system |
| US6650264B1 (en) * | 1999-03-10 | 2003-11-18 | Cirrus Logic, Inc. | Quadrature sampling architecture and method for analog-to-digital converters |
| US6492762B1 (en) | 1999-03-22 | 2002-12-10 | Transurgical, Inc. | Ultrasonic transducer, transducer array, and fabrication method |
| US7391872B2 (en) | 1999-04-27 | 2008-06-24 | Frank Joseph Pompei | Parametric audio system |
| US6322505B1 (en) | 1999-06-08 | 2001-11-27 | Acuson Corporation | Medical diagnostic ultrasound system and method for post processing |
| US6235024B1 (en) | 1999-06-21 | 2001-05-22 | Hosheng Tu | Catheters system having dual ablation capability |
| US20010007940A1 (en) * | 1999-06-21 | 2001-07-12 | Hosheng Tu | Medical device having ultrasound imaging and therapeutic means |
| US6258034B1 (en) * | 1999-08-04 | 2001-07-10 | Acuson Corporation | Apodization methods and apparatus for acoustic phased array aperture for diagnostic medical ultrasound transducer |
| US6251073B1 (en) * | 1999-08-20 | 2001-06-26 | Novasonics, Inc. | Miniaturized ultrasound apparatus and method |
| US6497664B1 (en) * | 1999-09-14 | 2002-12-24 | Ecton, Inc. | Medical diagnostic ultrasound system and method |
| US6325759B1 (en) * | 1999-09-23 | 2001-12-04 | Ultrasonix Medical Corporation | Ultrasound imaging system |
| US6255761B1 (en) * | 1999-10-04 | 2001-07-03 | The United States Of America As Represented By The Secretary Of The Navy | Shaped piezoelectric composite transducer |
| US6806622B1 (en) * | 1999-10-22 | 2004-10-19 | Materials Systems, Inc. | Impact-reinforced piezocomposite transducer array |
| US6350238B1 (en) | 1999-11-02 | 2002-02-26 | Ge Medical Systems Global Technology Company, Llc | Real-time display of ultrasound in slow motion |
| US6546803B1 (en) * | 1999-12-23 | 2003-04-15 | Daimlerchrysler Corporation | Ultrasonic array transducer |
| US6457365B1 (en) | 2000-02-09 | 2002-10-01 | Endosonics Corporation | Method and apparatus for ultrasonic imaging |
| TW569424B (en) | 2000-03-17 | 2004-01-01 | Matsushita Electric Ind Co Ltd | Module with embedded electric elements and the manufacturing method thereof |
| US6787974B2 (en) | 2000-03-22 | 2004-09-07 | Prorhythm, Inc. | Ultrasound transducer unit and planar ultrasound lens |
| KR100887275B1 (ko) * | 2000-03-23 | 2009-03-06 | 크로스 매치 테크놀로지스, 인크. | 압전 식별 디바이스 및 그 응용 |
| US6503204B1 (en) * | 2000-03-31 | 2003-01-07 | Acuson Corporation | Two-dimensional ultrasonic transducer array having transducer elements in a non-rectangular or hexagonal grid for medical diagnostic ultrasonic imaging and ultrasound imaging system using same |
| US6483225B1 (en) * | 2000-07-05 | 2002-11-19 | Acuson Corporation | Ultrasound transducer and method of manufacture thereof |
| JP3951091B2 (ja) | 2000-08-04 | 2007-08-01 | セイコーエプソン株式会社 | 半導体装置の製造方法 |
| US6679845B2 (en) * | 2000-08-30 | 2004-01-20 | The Penn State Research Foundation | High frequency synthetic ultrasound array incorporating an actuator |
| US6822374B1 (en) | 2000-11-15 | 2004-11-23 | General Electric Company | Multilayer piezoelectric structure with uniform electric field |
| US6558323B2 (en) | 2000-11-29 | 2003-05-06 | Olympus Optical Co., Ltd. | Ultrasound transducer array |
| AU2001289196B2 (en) | 2000-12-01 | 2004-09-30 | The Cleveland Clinic Foundation | Miniature ultrasound transducer |
| US6759791B2 (en) | 2000-12-21 | 2004-07-06 | Ram Hatangadi | Multidimensional array and fabrication thereof |
| US6695783B2 (en) * | 2000-12-22 | 2004-02-24 | Koninklijke Philips Electronics N.V. | Multiline ultrasound beamformers |
| JP3849976B2 (ja) | 2001-01-25 | 2006-11-22 | 松下電器産業株式会社 | 複合圧電体と超音波診断装置用超音波探触子と超音波診断装置および複合圧電体の製造方法 |
| US6490228B2 (en) * | 2001-02-16 | 2002-12-03 | Koninklijke Philips Electronics N.V. | Apparatus and method of forming electrical connections to an acoustic transducer |
| US6936009B2 (en) * | 2001-02-27 | 2005-08-30 | General Electric Company | Matching layer having gradient in impedance for ultrasound transducers |
| US6664717B1 (en) | 2001-02-28 | 2003-12-16 | Acuson Corporation | Multi-dimensional transducer array and method with air separation |
| US6437487B1 (en) | 2001-02-28 | 2002-08-20 | Acuson Corporation | Transducer array using multi-layered elements and a method of manufacture thereof |
| US6761688B1 (en) | 2001-02-28 | 2004-07-13 | Siemens Medical Solutions Usa, Inc. | Multi-layered transducer array and method having identical layers |
| US6685644B2 (en) | 2001-04-24 | 2004-02-03 | Kabushiki Kaisha Toshiba | Ultrasound diagnostic apparatus |
| FR2828056B1 (fr) | 2001-07-26 | 2004-02-27 | Metal Cable | Transducteur multi-element fonctionnant a des hautes frequences |
| US6635019B2 (en) | 2001-08-14 | 2003-10-21 | Koninklijke Philips Electronics Nv | Scanhead assembly for ultrasonic imaging having an integral beamformer and demountable array |
| US6673018B2 (en) | 2001-08-31 | 2004-01-06 | Ge Medical Systems Global Technology Company Llc | Ultrasonic monitoring system and method |
| US6761697B2 (en) | 2001-10-01 | 2004-07-13 | L'oreal Sa | Methods and systems for predicting and/or tracking changes in external body conditions |
| CA2406684A1 (en) | 2001-10-05 | 2003-04-05 | Queen's University At Kingston | Ultrasound transducer array |
| US6656124B2 (en) | 2001-10-15 | 2003-12-02 | Vermon | Stack based multidimensional ultrasonic transducer array |
| SG122749A1 (en) | 2001-10-16 | 2006-06-29 | Inst Data Storage | Method of laser marking and apparatus therefor |
| WO2003040427A1 (en) | 2001-10-16 | 2003-05-15 | Data Storage Institute | Thin film deposition by laser irradiation |
| CN1263173C (zh) | 2001-12-06 | 2006-07-05 | 松下电器产业株式会社 | 复合压电体及其制造方法 |
| US7139676B2 (en) * | 2002-01-18 | 2006-11-21 | Agilent Technologies, Inc | Revising a test suite using diagnostic efficacy evaluation |
| US6705992B2 (en) | 2002-02-28 | 2004-03-16 | Koninklijke Philips Electronics N.V. | Ultrasound imaging enhancement to clinical patient monitoring functions |
| US20030173870A1 (en) | 2002-03-12 | 2003-09-18 | Shuh-Yueh Simon Hsu | Piezoelectric ultrasound transducer assembly having internal electrodes for bandwidth enhancement and mode suppression |
| JP3857170B2 (ja) | 2002-03-29 | 2006-12-13 | 日本電波工業株式会社 | 超音波探触子 |
| US6784600B2 (en) | 2002-05-01 | 2004-08-31 | Koninklijke Philips Electronics N.V. | Ultrasonic membrane transducer for an ultrasonic diagnostic probe |
| US6676606B2 (en) * | 2002-06-11 | 2004-01-13 | Koninklijke Philips Electronics N.V. | Ultrasonic diagnostic micro-vascular imaging |
| US6612989B1 (en) | 2002-06-18 | 2003-09-02 | Koninklijke Philips Electronics N.V. | System and method for synchronized persistence with contrast agent imaging |
| US6891311B2 (en) | 2002-06-27 | 2005-05-10 | Siemens Medical Solutions Usa, Inc | Ultrasound transmit pulser with receive interconnection and method of use |
| US6806623B2 (en) * | 2002-06-27 | 2004-10-19 | Siemens Medical Solutions Usa, Inc. | Transmit and receive isolation for ultrasound scanning and methods of use |
| US6994674B2 (en) | 2002-06-27 | 2006-02-07 | Siemens Medical Solutions Usa, Inc. | Multi-dimensional transducer arrays and method of manufacture |
| US6875178B2 (en) | 2002-06-27 | 2005-04-05 | Siemens Medical Solutions Usa, Inc. | Receive circuit for ultrasound imaging |
| DE10229880A1 (de) | 2002-07-03 | 2004-01-29 | Siemens Ag | Bildanalyseverfahren und Vorrichtung zur Bildauswertung für die in vivo Kleintierbildgebung |
| JP2005532871A (ja) | 2002-07-12 | 2005-11-04 | アイサイエンス サージカル コーポレイション | 組織画像形成用の超音波インタフェース接続デバイス |
| EP1539381A1 (en) | 2002-07-15 | 2005-06-15 | Eagle Ultrasound AS | High frequency and multi frequency band ultrasound transducers based on ceramic films |
| US7148607B2 (en) | 2002-07-19 | 2006-12-12 | Aloka Co., Ltd. | Ultrasonic probe and manufacturing method thereof |
| JP4109030B2 (ja) | 2002-07-19 | 2008-06-25 | オリンパス株式会社 | 生体組織のクリップ装置 |
| DE10236854B4 (de) | 2002-08-07 | 2004-09-23 | Samsung SDI Co., Ltd., Suwon | Verfahren und Vorrichtung zur Strukturierung von Elektroden von organischen lichtemittierenden Elementen |
| JP3906126B2 (ja) | 2002-08-13 | 2007-04-18 | 株式会社東芝 | 超音波トランスデューサおよびその製造方法 |
| ES2402270T3 (es) | 2002-10-10 | 2013-04-30 | Visualsonics Inc. | Sistema de formación de imágenes por ultrasonidos de alta frecuencia y de alta frecuencia de fotogramas |
| US7426904B2 (en) * | 2002-10-10 | 2008-09-23 | Visualsonics Inc. | Small-animal mount assembly |
| EP1551275B1 (en) | 2002-10-10 | 2015-06-03 | Visualsonics Inc. | Integrated multi-rail imaging system |
| JP4755423B2 (ja) | 2002-10-16 | 2011-08-24 | ヴァリアン メディカル システムズ インコーポレイテッド | 像形成装置における過剰信号補正方法及び装置 |
| US7052462B2 (en) | 2002-10-24 | 2006-05-30 | Olympus Corporation | Ultrasonic probe and ultrasonic diagnostic equipment |
| US6822376B2 (en) | 2002-11-19 | 2004-11-23 | General Electric Company | Method for making electrical connection to ultrasonic transducer |
| US6740037B1 (en) * | 2002-12-10 | 2004-05-25 | Myron R. Schoenfeld | High Frequency ultrasonagraphy utilizing constructive interference |
| US6831394B2 (en) * | 2002-12-11 | 2004-12-14 | General Electric Company | Backing material for micromachined ultrasonic transducer devices |
| US7052460B2 (en) | 2003-05-09 | 2006-05-30 | Visualsonics Inc. | System for producing an ultrasound image using line-based image reconstruction |
| US7377900B2 (en) * | 2003-06-02 | 2008-05-27 | Insightec - Image Guided Treatment Ltd. | Endo-cavity focused ultrasound transducer |
| US20050039323A1 (en) | 2003-08-22 | 2005-02-24 | Simens Medical Solutions Usa, Inc. | Transducers with electically conductive matching layers and methods of manufacture |
| DE602004004841T2 (de) | 2003-08-29 | 2007-11-08 | Fujifilm Corp. | Laminierte Struktur, Verfahren zur Herstellung derselben und Vielfach-Ultraschallwandlerfeld |
| US7249513B1 (en) * | 2003-10-02 | 2007-07-31 | Gore Enterprise Holdings, Inc. | Ultrasound probe |
| US20050089205A1 (en) * | 2003-10-23 | 2005-04-28 | Ajay Kapur | Systems and methods for viewing an abnormality in different kinds of images |
| US7156938B2 (en) | 2003-11-11 | 2007-01-02 | General Electric Company | Method for making multi-layer ceramic acoustic transducer |
| US7017245B2 (en) | 2003-11-11 | 2006-03-28 | General Electric Company | Method for making multi-layer ceramic acoustic transducer |
| US7109642B2 (en) | 2003-11-29 | 2006-09-19 | Walter Guy Scott | Composite piezoelectric apparatus and method |
| TW200520019A (en) | 2003-12-12 | 2005-06-16 | Ind Tech Res Inst | Control device of substrate temperature |
| US8708909B2 (en) | 2004-01-20 | 2014-04-29 | Fujifilm Visualsonics, Inc. | High frequency ultrasound imaging using contrast agents |
| US20050203402A1 (en) * | 2004-02-09 | 2005-09-15 | Angelsen Bjorn A. | Digital ultrasound beam former with flexible channel and frequency range reconfiguration |
| EP1738407B1 (en) | 2004-04-20 | 2014-03-26 | Visualsonics Inc. | Arrayed ultrasonic transducer |
| US20070222339A1 (en) | 2004-04-20 | 2007-09-27 | Mark Lukacs | Arrayed ultrasonic transducer |
| US20050251232A1 (en) | 2004-05-10 | 2005-11-10 | Hartley Craig J | Apparatus and methods for monitoring heart rate and respiration rate and for monitoring and maintaining body temperature in anesthetized mammals undergoing diagnostic or surgical procedures |
| US7451650B2 (en) * | 2004-08-27 | 2008-11-18 | General Electric Company | Systems and methods for adjusting gain within an ultrasound probe |
| US8002708B2 (en) * | 2005-01-11 | 2011-08-23 | General Electric Company | Ultrasound beamformer with scalable receiver boards |
| US8137280B2 (en) | 2005-02-09 | 2012-03-20 | Surf Technology As | Digital ultrasound beam former with flexible channel and frequency range reconfiguration |
| JP4942666B2 (ja) | 2005-03-04 | 2012-05-30 | ビジュアルソニックス インコーポレイテッド | 超音波データのキャプチャによる呼吸信号の同期化方法 |
| CN101184428B (zh) | 2005-04-01 | 2013-09-25 | 视声公司 | 利用超声波使血管结构三维可视化的方法 |
| WO2007029028A1 (en) | 2005-09-06 | 2007-03-15 | Plastic Logic Limited | Laser ablation of electronic devices |
| GB0518105D0 (en) | 2005-09-06 | 2005-10-12 | Plastic Logic Ltd | Step-and-repeat laser ablation of electronic devices |
| US20070059247A1 (en) | 2005-08-30 | 2007-03-15 | Lindner Jonathan R | Deposit contrast agents and related methods thereof |
| US7946990B2 (en) | 2005-09-30 | 2011-05-24 | Siemens Medical Solutions Usa, Inc. | Ultrasound color flow imaging at high frame rates |
| WO2007041460A2 (en) * | 2005-10-03 | 2007-04-12 | Aradigm Corporation | Method and system for laser machining |
| EP1952175B1 (en) | 2005-11-02 | 2013-01-09 | Visualsonics, Inc. | Digital transmit beamformer for an arrayed ultrasound transducer system |
| WO2007067282A2 (en) | 2005-11-02 | 2007-06-14 | Visualsonics Inc. | Arrayed ultrasonic transducer |
| US7603153B2 (en) * | 2005-12-12 | 2009-10-13 | Sterling Investments Lc | Multi-element probe array |
| US7750536B2 (en) | 2006-03-02 | 2010-07-06 | Visualsonics Inc. | High frequency ultrasonic transducer and matching layer comprising cyanoacrylate |
| US20080007142A1 (en) * | 2006-06-23 | 2008-01-10 | Minoru Toda | Ultrasonic transducer assembly having a vibrating member and at least one reflector |
| US7892176B2 (en) * | 2007-05-02 | 2011-02-22 | General Electric Company | Monitoring or imaging system with interconnect structure for large area sensor array |
| US7518290B2 (en) * | 2007-06-19 | 2009-04-14 | Siemens Medical Solutions Usa, Inc. | Transducer array with non-uniform kerfs |
| US8008842B2 (en) * | 2007-10-26 | 2011-08-30 | Trs Technologies, Inc. | Micromachined piezoelectric ultrasound transducer arrays |
| DE102017124974B8 (de) | 2017-10-25 | 2019-05-02 | Tesat-Spacecom Gmbh & Co.Kg | Verbindungseinheit für Hochfrequenzgeräte |
-
2006
- 2006-11-02 EP EP06827417A patent/EP1952175B1/en active Active
- 2006-11-02 ES ES06827417T patent/ES2402741T3/es active Active
- 2006-11-02 WO PCT/US2006/042891 patent/WO2007056104A2/en active Application Filing
- 2006-11-02 JP JP2008539044A patent/JP5630958B2/ja not_active Expired - Fee Related
- 2006-11-02 US US11/592,741 patent/US7901358B2/en not_active Ceased
- 2006-11-02 CA CA2935422A patent/CA2935422C/en active Active
- 2006-11-02 CN CN200680050246.3A patent/CN101351724B/zh active Active
- 2006-11-02 CA CA2628100A patent/CA2628100C/en active Active
-
2009
- 2009-07-21 HK HK09106667.0A patent/HK1129243A1/xx unknown
-
2013
- 2013-03-07 US US13/789,539 patent/USRE46185E1/en active Active
- 2013-09-30 JP JP2013204411A patent/JP5690900B2/ja active Active
-
2014
- 2014-07-18 JP JP2014147355A patent/JP2014210201A/ja not_active Withdrawn
-
2016
- 2016-10-20 JP JP2016205684A patent/JP2017035528A/ja not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| CN101351724B (zh) | 2013-03-20 |
| JP5690900B2 (ja) | 2015-03-25 |
| HK1129243A1 (en) | 2009-11-20 |
| JP2014210201A (ja) | 2014-11-13 |
| JP2014000465A (ja) | 2014-01-09 |
| WO2007056104A2 (en) | 2007-05-18 |
| CA2935422A1 (en) | 2007-05-18 |
| US20070239001A1 (en) | 2007-10-11 |
| US7901358B2 (en) | 2011-03-08 |
| USRE46185E1 (en) | 2016-10-25 |
| ES2402741T3 (es) | 2013-05-08 |
| WO2007056104A9 (en) | 2007-07-12 |
| JP2009514600A (ja) | 2009-04-09 |
| EP1952175A2 (en) | 2008-08-06 |
| CA2935422C (en) | 2019-01-08 |
| EP1952175B1 (en) | 2013-01-09 |
| CA2628100C (en) | 2016-08-23 |
| WO2007056104A3 (en) | 2007-08-30 |
| JP2017035528A (ja) | 2017-02-16 |
| CA2628100A1 (en) | 2007-05-18 |
| CN101351724A (zh) | 2009-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5690900B2 (ja) | 高周波数アレイ超音波システム | |
| Tortoli et al. | ULA-OP: An advanced open platform for ultrasound research | |
| US6969352B2 (en) | Ultrasound probe with integrated electronics | |
| JP5137832B2 (ja) | 容積測定画像形成のための湾曲2次元アレイ超音波トランスデューサ及び方法 | |
| JP5705148B2 (ja) | 手持形の超音波画像形成システム | |
| US6669633B2 (en) | Unitary operator control for ultrasonic imaging graphical user interface | |
| JP2007325937A (ja) | 携帯式超音波撮像システム | |
| JP5496865B2 (ja) | 携帯式超音波撮像システム | |
| US20130102902A1 (en) | Ultrasound 3d imaging system | |
| JP2004527325A (ja) | 静的焦点超音波装置及び方法 | |
| JP5714221B2 (ja) | 超音波診断装置及び超音波送受信方法 | |
| US20090076394A1 (en) | High-frequency tissue imaging devices and methods | |
| WO2003000137A1 (en) | Orthogonally reconfigurable integrated matrix acoustical array | |
| Campbell et al. | An Ultrafast High-Frequency Hardware Beamformer for a Phased Array Endoscope | |
| JP2023531979A (ja) | 連続波ドプラ法のための超音波トランスデューサプローブに基づくアナログ-デジタル変換、並びに関連する装置、システム、及び方法 | |
| AU2002238135A1 (en) | Ultrasound Probe with Integrated Electronics |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091014 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101001 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111129 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120224 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120302 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120328 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120404 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120426 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120508 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130328 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130625 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130702 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130726 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130802 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130826 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130930 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140319 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140718 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20140729 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140916 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141007 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5630958 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |