JP2009005802A - 超音波撮像装置 - Google Patents
超音波撮像装置 Download PDFInfo
- Publication number
- JP2009005802A JP2009005802A JP2007168475A JP2007168475A JP2009005802A JP 2009005802 A JP2009005802 A JP 2009005802A JP 2007168475 A JP2007168475 A JP 2007168475A JP 2007168475 A JP2007168475 A JP 2007168475A JP 2009005802 A JP2009005802 A JP 2009005802A
- Authority
- JP
- Japan
- Prior art keywords
- monitor
- tomographic image
- dimensional
- imaging apparatus
- cross
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 89
- 230000035515 penetration Effects 0.000 claims abstract description 38
- 230000000149 penetrating effect Effects 0.000 claims abstract description 37
- 239000000523 sample Substances 0.000 claims description 90
- 238000003780 insertion Methods 0.000 claims description 57
- 230000037431 insertion Effects 0.000 claims description 57
- 238000012545 processing Methods 0.000 claims description 28
- 238000001514 detection method Methods 0.000 claims description 18
- 239000000284 extract Substances 0.000 claims description 6
- 238000002604 ultrasonography Methods 0.000 claims description 2
- 230000015572 biosynthetic process Effects 0.000 claims 1
- 230000002093 peripheral effect Effects 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 11
- 238000001574 biopsy Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 239000012530 fluid Substances 0.000 description 4
- 230000017531 blood circulation Effects 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 238000002592 echocardiography Methods 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 238000012285 ultrasound imaging Methods 0.000 description 1
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0833—Clinical applications involving detecting or locating foreign bodies or organic structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3413—Needle locating or guiding means guided by ultrasound
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Radiology & Medical Imaging (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
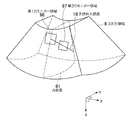
【解決手段】穿刺針12の予想刺入経路18にモニター領域16を設け、モニター領域16を貫通する穿刺針12の貫通位置を検出し、この貫通位置情報に基づいて、刺入断面であるA断面81の機械走査方向の断面位置を補正することとしているので、穿刺針12の実際の刺入経路を、刺入断面であるA断面に確実に描出することを実現させる。
【選択図】図8
Description
(実施の形態1)
(実施の形態2)
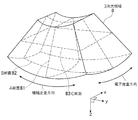
8 3次元領域
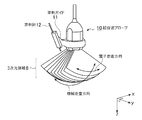
10 超音波プローブ
11 穿刺ガイド
12 穿刺針
13 切断面
14 胴体部
16 モニター領域
17 探触子アレイ
18 予想刺入経路
21 駆動歯車
24 駆動シャフト
25 回転制御部
28 ステッピングモータ
33 ベルト
47 結合流体
51 カバー
52 把持部
61 画像取得制御部
61 カバー
62 画像処理部
71 断面形成手段
72 モニター領域設定手段
73 貫通位置検出手段
74 断面位置補正手段
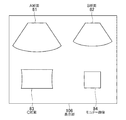
81、93 A断面
82 B断面
83 C断面
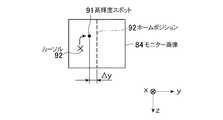
84 モニター画像
91 高輝度スポット
92 カーソル
96 第1のモニター領域
97 第2のモニター領域
100 超音波撮像装置
102 画像取得部
104 画像メモリ
105 画像表示制御部
106 表示部
107 入力部
108 制御部
Claims (17)
- 被検体の3次元断層画像情報を取得する超音波プローブと、
前記超音波プローブに保持される穿刺ガイドと、
前記穿刺ガイドに装着され、前記3次元断層画像情報が取得される被検体の3次元領域に刺入される穿刺針と、
前記3次元断層画像情報を記憶する画像メモリと、
前記3次元断層画像情報に基づいて、前記刺入が予想される予想刺入経路を含む刺入断面の刺入断面画像情報を形成する画像処理部と、
を備える超音波撮像装置であって、
前記画像処理部は、前記3次元領域に対応する前記画像メモリの3次元メモリ領域に、前記3次元領域では前記予想刺入経路が中心位置近傍を貫通する平面状のモニター領域となるモニターメモリ領域を設定するモニター領域設定手段、前記穿刺針が前記モニター領域を貫通する際に、前記モニターメモリ領域の断層画像情報に基づいて、前記穿刺針が前記モニター領域を貫通する貫通位置を検出する貫通位置検出手段および前記貫通位置を含むように前記刺入断面の断面位置を補正する断面位置補正手段を備えることを特徴とする超音波撮像装置。 - 前記超音波プローブは、圧電素子が円弧状または直線状に1次元配列される探触子アレイ、並びに、前記1次元配列の配列方向と直交する機械走査方向に、前記探触子アレイを繰り返し機械的に走査する機械走査手段を備えることを特徴とする請求項1に記載の超音波撮像装置。
- 前記穿刺ガイドは、前記機械的に走査される走査範囲の中心に位置する前記配列方向を含む断面内に、前記穿刺針を刺入することを特徴とする請求項2に記載の超音波撮像装置。
- 前記画像処理部は、前記機械的に走査される走査範囲の中心に位置する前記配列方向を含む断面を、前記刺入断面とすることを特徴とする請求項3に記載の超音波撮像装置。
- 前記超音波プローブは、圧電素子が面状に2次元配列される2次元探触子アレイを備えることを特徴とする請求項1に記載の超音波撮像装置。
- 前記画像処理部は、前記刺入断面を一つの断面として含み、前記3次元領域で互いに直交する直交3断面の断層画像情報を形成する直交3断面形成手段を備えることを特徴とする請求項1ないし5のいずれか一つに記載の超音波撮像装置。
- 前記超音波撮像装置は、さらに前記直交3断面の断層画像情報を表示する表示部を備えることを特徴とする請求項6に記載の超音波撮像装置。
- 前記モニター領域設定手段は、前記画像メモリから前記モニターメモリ領域の断層画像情報を抽出し、前記断層画像情報の断層画像を前記表示部に表示することを特徴とする請求項7に記載の超音波撮像装置。
- 前記貫通位置検出手段は、前記表示された断層画像の中に位置を指定するカーソルおよび前記カーソルの前記断層画像の中での位置を検出し、前記貫通位置とするカーソル位置検出手段を備えることを特徴とする請求項8に記載の超音波撮像装置。
- 前記貫通位置検出手段は、前記3次元断層画像情報から前記モニターメモリ領域の断層画像情報を抽出し、前記断層画像情報の断層画像に含まれる、前記穿刺針の貫通位置を自動で検出する自動検出手段を備えることを特徴とする請求項1ないし8のいずれか一つに記載の超音波撮像装置。
- 前記自動検出手段は、前記断層画像の閾値を越える高輝度スポットの画素位置を、前記貫通位置として自動検出することを特徴とする請求項10に記載の超音波撮像装置。
- 前記自動検出手段は、前記画像メモリに取得時間が時系列をなす複数の前記3次元断層画像情報が記憶される際に、前記モニターメモリ領域の時系列をなす複数の断層画像情報を抽出し、前記複数の断層画像情報が有する断層画像の中から、前記貫通位置を自動検出することを特徴とする請求項10または11に記載の超音波撮像装置。
- 前記自動検出手段は、前記画像メモリに取得時間が時系列をなす複数の前記3次元断層画像情報が記憶される際に、前記モニターメモリ領域の時系列をなす複数の2次元断層画像情報を抽出し、前記複数の2次元断層画像情報が有する2次元断層画像を、取得時間が異なる2枚の2次元断層画像の間で差分を行い、前記差分された差分断層画像に含まれる、閾値を越えるスポットの画素位置を、前記貫通位置として自動検出することを特徴とする請求項10に記載の超音波撮像装置。
- 前記モニター領域設定手段は、前記穿刺針が前記3次元領域に刺入を開始する前記3次元領域の辺縁部に位置する第1のモニター領域に対応する前記画像メモリの第1のモニターメモリ領域を備えることを特徴とする請求項1ないし13のいずれか一つに記載の超音波撮像装置。
- 前記モニター領域設定手段は、前記3次元領域内に位置する第2のモニター領域に対応する前記画像メモリの第2のモニターメモリ領域を備えることを特徴とする請求項14に記載の超音波撮像装置。
- 前記貫通位置検出手段は、前記第1のモニターメモリ領域および前記第2のモニターメモリ領域の断層画像情報に基づいて、前記穿刺針が前記第1のモニター領域および前記第2のモニター領域を貫通する第1の貫通位置および第2の貫通位置を検出することを特徴とする請求項15に記載の超音波撮像装置。
- 前記断面位置補正手段は、前記第1の貫通位置および前記第2の貫通位置を含むように前記刺入断面の断面位置を補正することを特徴とする請求項16に記載の超音波撮像装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007168475A JP2009005802A (ja) | 2007-06-27 | 2007-06-27 | 超音波撮像装置 |
| US12/146,316 US20090005687A1 (en) | 2007-06-27 | 2008-06-25 | Ultrasonic imaging apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007168475A JP2009005802A (ja) | 2007-06-27 | 2007-06-27 | 超音波撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009005802A true JP2009005802A (ja) | 2009-01-15 |
| JP2009005802A5 JP2009005802A5 (ja) | 2011-11-24 |
Family
ID=40161452
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007168475A Ceased JP2009005802A (ja) | 2007-06-27 | 2007-06-27 | 超音波撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20090005687A1 (ja) |
| JP (1) | JP2009005802A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012139437A (ja) * | 2011-01-04 | 2012-07-26 | Toshiba Corp | 超音波診断装置 |
| JP2014046122A (ja) * | 2012-09-04 | 2014-03-17 | Ge Medical Systems Global Technology Co Llc | 医用画像表示装置及び医用画像診断システム |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2413802A1 (en) * | 2009-04-01 | 2012-02-08 | Analogic Corporation | Ultrasound probe |
| US8308741B2 (en) * | 2009-04-28 | 2012-11-13 | The Invention Science Fund I, Llc | Systems and methods for automatically inserting a needle into a living subject |
| BR112014031994B1 (pt) | 2012-06-28 | 2021-12-28 | Koninklijke Philips N.V | Sistema de imagens ultrassônicas que guiam visualmente a inserção de um dispositivo invasivo como uma agulha |
| US10660667B2 (en) | 2013-03-13 | 2020-05-26 | The University Of British Columbia | Apparatus, system and method for imaging a medical instrument |
| FR3071396B1 (fr) * | 2017-09-22 | 2022-01-21 | Koelis | Dispositif de guidage d’instrument medical et procede correspondant |
| WO2019127449A1 (zh) * | 2017-12-29 | 2019-07-04 | 威朋(苏州)医疗器械有限公司 | 手术导航方法及系统 |
| CN112533540A (zh) * | 2018-08-13 | 2021-03-19 | 深圳迈瑞生物医疗电子股份有限公司 | 超声成像的方法、超声成像设备以及穿刺导航系统 |
| CN109394317B (zh) * | 2018-12-14 | 2020-11-20 | 清华大学 | 穿刺路径规划装置及方法 |
| CN109793629B (zh) * | 2019-01-17 | 2021-02-19 | 青岛市海慈医疗集团 | 一种血液透析室护理装置 |
| US11903663B2 (en) | 2021-08-24 | 2024-02-20 | Hyperion Surgical, Inc. | Robotic systems, devices, and methods for vascular access |
| US11678944B1 (en) | 2022-08-23 | 2023-06-20 | Hyperion Surgical, Inc. | Manipulators and cartridges for robotic-assisted vascular access |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06205776A (ja) * | 1993-01-11 | 1994-07-26 | Toshiba Corp | 超音波診断装置 |
| JP2000107178A (ja) * | 1998-09-30 | 2000-04-18 | Olympus Optical Co Ltd | 超音波ガイド下穿刺システム |
| JP2000185041A (ja) * | 1998-10-14 | 2000-07-04 | Toshiba Corp | 超音波診断装置 |
| JP2002219128A (ja) * | 2000-11-16 | 2002-08-06 | Kretztechnik Ag | 生検針の導入方向を決定し、かつ導入経路を監視する方法 |
| JP2003334191A (ja) * | 2002-05-21 | 2003-11-25 | Aloka Co Ltd | 穿刺用超音波診断装置及び穿刺用超音波探触子 |
| JP2006087599A (ja) * | 2004-09-22 | 2006-04-06 | Toshiba Corp | 超音波診断装置 |
| JP2007000226A (ja) * | 2005-06-22 | 2007-01-11 | Toshiba Corp | 医用画像診断装置 |
| JP2007236767A (ja) * | 2006-03-10 | 2007-09-20 | Hitachi Medical Corp | 超音波診断装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4407294A (en) * | 1982-01-07 | 1983-10-04 | Technicare Corporation | Ultrasound tissue probe localization system |
| US4899756A (en) * | 1988-07-18 | 1990-02-13 | Sonek Jiri D | Articulated needle guide for ultrasound imaging and method of using same |
| IL107523A (en) * | 1993-11-07 | 2000-01-31 | Ultraguide Ltd | Articulated needle guide for ultrasound imaging and method of using same |
| US6019724A (en) * | 1995-02-22 | 2000-02-01 | Gronningsaeter; Aage | Method for ultrasound guidance during clinical procedures |
| US6540679B2 (en) * | 2000-12-28 | 2003-04-01 | Guided Therapy Systems, Inc. | Visual imaging system for ultrasonic probe |
| US6733458B1 (en) * | 2001-09-25 | 2004-05-11 | Acuson Corporation | Diagnostic medical ultrasound systems and methods using image based freehand needle guidance |
| JP3967950B2 (ja) * | 2002-04-10 | 2007-08-29 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 穿刺針案内具、超音波プローブおよび超音波撮影装置 |
| US7022082B2 (en) * | 2002-05-13 | 2006-04-04 | Sonek Jiri D | Needle guide systems and methods |
| US7270634B2 (en) * | 2003-03-27 | 2007-09-18 | Koninklijke Philips Electronics N.V. | Guidance of invasive medical devices by high resolution three dimensional ultrasonic imaging |
| US20060020204A1 (en) * | 2004-07-01 | 2006-01-26 | Bracco Imaging, S.P.A. | System and method for three-dimensional space management and visualization of ultrasound data ("SonoDEX") |
| CA2935422C (en) * | 2005-11-02 | 2019-01-08 | Visualsonics Inc. | High frequency array ultrasound system |
-
2007
- 2007-06-27 JP JP2007168475A patent/JP2009005802A/ja not_active Ceased
-
2008
- 2008-06-25 US US12/146,316 patent/US20090005687A1/en not_active Abandoned
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06205776A (ja) * | 1993-01-11 | 1994-07-26 | Toshiba Corp | 超音波診断装置 |
| JP2000107178A (ja) * | 1998-09-30 | 2000-04-18 | Olympus Optical Co Ltd | 超音波ガイド下穿刺システム |
| JP2000185041A (ja) * | 1998-10-14 | 2000-07-04 | Toshiba Corp | 超音波診断装置 |
| JP2002219128A (ja) * | 2000-11-16 | 2002-08-06 | Kretztechnik Ag | 生検針の導入方向を決定し、かつ導入経路を監視する方法 |
| JP2007301399A (ja) * | 2000-11-16 | 2007-11-22 | Kretztechnik Ag | 超音波イメージング装置 |
| JP2003334191A (ja) * | 2002-05-21 | 2003-11-25 | Aloka Co Ltd | 穿刺用超音波診断装置及び穿刺用超音波探触子 |
| JP2006087599A (ja) * | 2004-09-22 | 2006-04-06 | Toshiba Corp | 超音波診断装置 |
| JP2007000226A (ja) * | 2005-06-22 | 2007-01-11 | Toshiba Corp | 医用画像診断装置 |
| JP2007236767A (ja) * | 2006-03-10 | 2007-09-20 | Hitachi Medical Corp | 超音波診断装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012139437A (ja) * | 2011-01-04 | 2012-07-26 | Toshiba Corp | 超音波診断装置 |
| JP2014046122A (ja) * | 2012-09-04 | 2014-03-17 | Ge Medical Systems Global Technology Co Llc | 医用画像表示装置及び医用画像診断システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090005687A1 (en) | 2009-01-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009005802A (ja) | 超音波撮像装置 | |
| KR101140525B1 (ko) | 촬상 영역 확장 방법 | |
| US20090069679A1 (en) | Ultrasound diagnostic apparatus | |
| JP5486449B2 (ja) | 超音波画像生成装置及び超音波画像生成装置の作動方法 | |
| WO2014003070A1 (ja) | 超音波診断装置及び超音波画像処理方法 | |
| JP2000185041A (ja) | 超音波診断装置 | |
| JP6063454B2 (ja) | 超音波診断装置及び軌跡表示方法 | |
| JP2007159653A (ja) | 穿刺用超音波プローブ及び超音波診断装置 | |
| JP2008086742A (ja) | 超音波プローブの軌跡表現装置及び超音波診断装置 | |
| JP2004208859A (ja) | 超音波診断装置 | |
| CN114364325A (zh) | 超声波诊断装置及超声波诊断装置的控制方法 | |
| JP5954786B2 (ja) | 超音波診断装置及び画像データの表示制御プログラム | |
| JP2009261657A (ja) | 超音波撮像装置 | |
| JP2008012150A (ja) | 超音波診断装置、及び超音波診断装置の制御プログラム | |
| JP2005342128A (ja) | 超音波診断装置及び超音波診断装置の制御方法 | |
| JP2007195867A (ja) | 超音波診断装置及び超音波画像表示プログラム | |
| JP2013118998A (ja) | 医用画像診断装置、超音波診断装置及びプログラム | |
| JP2007268148A (ja) | 超音波診断装置 | |
| JP5535596B2 (ja) | 超音波診断装置 | |
| JP2006314689A (ja) | 超音波診断装置及び超音波診断装置制御プログラム | |
| JP5202916B2 (ja) | 超音波画像診断装置およびその制御プログラム | |
| JP5317395B2 (ja) | 超音波診断装置および超音波診断画像表示方法 | |
| JP6472719B2 (ja) | 超音波診断装置 | |
| JPH1133028A (ja) | 超音波診断装置用穿刺システム | |
| JP6068017B2 (ja) | 超音波診断装置及び画像生成プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20100415 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111011 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120229 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120305 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20120730 |