JP5494183B2 - 自動収穫装置 - Google Patents
自動収穫装置 Download PDFInfo
- Publication number
- JP5494183B2 JP5494183B2 JP2010100009A JP2010100009A JP5494183B2 JP 5494183 B2 JP5494183 B2 JP 5494183B2 JP 2010100009 A JP2010100009 A JP 2010100009A JP 2010100009 A JP2010100009 A JP 2010100009A JP 5494183 B2 JP5494183 B2 JP 5494183B2
- Authority
- JP
- Japan
- Prior art keywords
- fruit
- photographing
- crop
- automatic harvesting
- image processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Description
また、本発明の自動収穫装置は、前記揺動装置が、前記農作物に向けた送風を行うことにより、前記農作物の葉を揺動させる送風装置(12)であることを特徴としている。
また、本発明の自動収穫装置は、前記送風装置の位置又は姿勢の少なくとも一方を制御して、前記農作物に向けた送風を異なる方向から行わせる駆動制御装置(C12)を備えることを特徴としている。
また、本発明の自動収穫装置は、前記揺動装置が、前記農作物の一部を把持して振動させることにより、前記農作物の葉を揺動させることを特徴としている。
また、本発明の自動収穫装置は、前記収穫装置が、収穫すべき果実を把持するとともに、前記揺動装置を兼ねることを特徴としている。
また、本発明の自動収穫装置は、前記揺動装置が、前記農作物に取り付けられて前記農作物を振動させる振動装置(32)に対して振動の開始及び停止を指示することにより、前記農作物の葉を揺動させることを特徴としている。
また、本発明の自動収穫装置は、前記画像処理装置が、前記撮影装置で撮影される複数の画像を積算する処理を行い、積算値の大きな部分を前記果実と特定することを特徴としている。
また、本発明の自動収穫装置は、前記画像処理装置が、前記撮影装置で撮影される複数の画像の変化部分毎の周波数分析を行い、周波数が低い部分を前記果実と特定することを特徴としている。
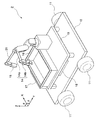
図1は、本発明の第1実施形態による自動収穫装置の外観を模式的に示す斜視図である。図1に示す通り、本実施形態の自動収穫装置1は、平面視形状が略矩形形状の車台10に支持される4つの車輪11と、車台10上に設けられる送風機12(揺動装置、送風装置)、送風機駆動機構13、マニピュレータ14(収穫装置)、画像センサ15(撮影装置)、収穫籠16、バッテリ17、及びコントローラ18とを備えており、車輪11によって走行しつつ、収穫すべき果実であるリンゴの実を自動的に収穫する。
図4は、本発明の第2実施形態による自動収穫装置の外観を模式的に示す斜視図である。尚、図4においては、図1に示した構成と同じものについては同一の符号を付してある。図4に示す通り、本実施形態の自動収穫装置2は、図1に示す自動収穫装置1が備える送風機12、送風機駆動機構13、及びレール13aを省略し、ハンド部14bとは別個に画像センサ15を移動させることができるサブアーム21をマニピュレータ14に取り付けた構成である。
図8は、本発明の第3実施形態による自動収穫装置の外観を模式的に示す斜視図である。尚、図8においては、図1に示した構成と同じものについては同一の符号を付してある。図8に示す通り、本実施形態の自動収穫装置3は、図1に示す自動収穫装置1が備える送風機12、送風機駆動機構13、及びレール13aを省略し、車台10の右端に振動コマンド送信機31を設けた構成である。
12 送風機
14 マニピュレータ
15 画像センサ
32 振動装置
C11 画像処理部
C12 送風機駆動制御部
C21 画像処理部
Claims (6)
- 収穫すべき果実が生る農作物を撮影する撮影装置と、前記撮影装置で撮影された画像から特定される前記果実を収穫する収穫装置とを備える自動収穫装置において、
前記撮影装置によって撮影が行われている状態で、前記農作物に向けた送風を行うことにより、前記農作物の葉を揺動させる送風装置と、
前記送風装置の位置又は姿勢の少なくとも一方を制御して、前記農作物に向けた送風を異なる方向から行わせる駆動制御装置と、
前記送風装置が前記農作物の葉を揺動させているときに前記撮影装置で撮影される複数の画像に対して所定の画像処理を行い、前記葉に隠れた前記果実を特定する画像処理装置と
を備えることを特徴とする自動収穫装置。 - 収穫すべき果実が生る農作物を撮影する撮影装置と、前記撮影装置で撮影された画像から特定される前記果実を収穫する収穫装置とを備える自動収穫装置において、
前記撮影装置によって撮影が行われている状態で、前記農作物の一部を把持して振動させることにより、前記農作物の葉を揺動させる揺動装置と、
前記揺動装置が前記農作物の葉を揺動させているときに前記撮影装置で撮影される複数の画像に対して所定の画像処理を行い、前記葉に隠れた前記果実を特定する画像処理装置と
を備えることを特徴とする自動収穫装置。 - 収穫すべき果実が生る農作物を撮影する撮影装置と、前記撮影装置で撮影された画像から特定される前記果実を収穫する収穫装置とを備える自動収穫装置において、
前記撮影装置によって撮影が行われている状態で、前記農作物に取り付けられて前記農作物を振動させる振動装置に対して振動の開始及び停止を指示することにより、前記農作物の葉を揺動させる揺動装置と、
前記揺動装置が前記農作物の葉を揺動させているときに前記撮影装置で撮影される複数の画像に対して所定の画像処理を行い、前記葉に隠れた前記果実を特定する画像処理装置と
を備えることを特徴とする自動収穫装置。 - 前記画像処理装置は、前記撮影装置で撮影される複数の画像を積算する処理を行い、積算値の大きな部分を前記果実と特定することを特徴とする請求項1記載の自動収穫装置。
- 前記収穫装置は、収穫すべき果実を把持するとともに、前記揺動装置を兼ねることを特徴とする請求項2記載の自動収穫装置。
- 前記画像処理装置は、前記撮影装置で撮影される複数の画像の変化部分毎の周波数分析を行い、周波数が低い部分を前記果実と特定することを特徴とする請求項2、請求項3、又は請求項5記載の自動収穫装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010100009A JP5494183B2 (ja) | 2010-04-23 | 2010-04-23 | 自動収穫装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010100009A JP5494183B2 (ja) | 2010-04-23 | 2010-04-23 | 自動収穫装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011229406A JP2011229406A (ja) | 2011-11-17 |
| JP5494183B2 true JP5494183B2 (ja) | 2014-05-14 |
Family
ID=45319422
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010100009A Active JP5494183B2 (ja) | 2010-04-23 | 2010-04-23 | 自動収穫装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5494183B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180066527A (ko) * | 2016-12-09 | 2018-06-19 | 엠티코리아(주) | 고추 자동 수확 장치 |
| CN111011004A (zh) * | 2019-12-28 | 2020-04-17 | 河南理工大学 | 采摘设备 |
| JP2021023212A (ja) * | 2019-08-05 | 2021-02-22 | 井関農機株式会社 | 収穫用車両 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5914880B2 (ja) * | 2012-11-09 | 2016-05-11 | パナソニックIpマネジメント株式会社 | 植物育成装置 |
| KR101685414B1 (ko) * | 2013-11-05 | 2016-12-14 | 울산과학기술원 | 로봇팔을 이용한 과수 작업기 |
| JP6330552B2 (ja) * | 2014-07-30 | 2018-05-30 | カシオ計算機株式会社 | 植物の育成状態判定装置、植物の育成状態判定方法及びプログラム |
| JP6738570B2 (ja) * | 2015-11-17 | 2020-08-12 | 国立大学法人宇都宮大学 | 分散協働型処理システム |
| EP3626043B1 (en) * | 2017-05-17 | 2024-02-14 | Inaho, Inc. | Agricultural work apparatus, agricultural work management system, and program |
| CN108702942A (zh) * | 2018-07-26 | 2018-10-26 | 浙江理工大学 | 一种面向林果采收的自适应偏心振动装置 |
| CN109197160B (zh) * | 2018-09-12 | 2020-05-15 | 华南农业大学 | 一种番石榴采摘机器人及其实现方法 |
| JP7321910B2 (ja) | 2019-12-02 | 2023-08-07 | 株式会社クボタ | 農業用ロボット |
| JP7214612B2 (ja) * | 2019-12-02 | 2023-01-30 | 株式会社クボタ | 農業用ロボット |
| CN110972707A (zh) * | 2020-01-08 | 2020-04-10 | 江苏农牧科技职业学院 | 一种香橼果实采摘装置和方法 |
| WO2021261294A1 (ja) | 2020-06-24 | 2021-12-30 | 株式会社クボタ | 農業用ロボット |
| WO2021261246A1 (ja) | 2020-06-24 | 2021-12-30 | 株式会社クボタ | 農業用ロボット及び農業用ロボットの支援システム |
| CN112243698B (zh) | 2020-10-22 | 2021-08-13 | 安徽农业大学 | 一种基于多传感器融合技术的核桃自动化采摘及收集方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4938207Y2 (ja) * | 1972-01-14 | 1974-10-19 | ||
| JP3139068B2 (ja) * | 1991-08-29 | 2001-02-26 | 井関農機株式会社 | 果菜類収穫機等の果菜把握方式 |
| JPH05168335A (ja) * | 1991-12-19 | 1993-07-02 | Iseki & Co Ltd | 果実収穫ロボツトの視覚装置 |
| JP3506779B2 (ja) * | 1994-10-07 | 2004-03-15 | 株式会社クボタ | 果菜類の収穫対象部検出装置 |
| JPH11281480A (ja) * | 1998-03-31 | 1999-10-15 | Omron Corp | 撮像装置及び方法 |
-
2010
- 2010-04-23 JP JP2010100009A patent/JP5494183B2/ja active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180066527A (ko) * | 2016-12-09 | 2018-06-19 | 엠티코리아(주) | 고추 자동 수확 장치 |
| JP2021023212A (ja) * | 2019-08-05 | 2021-02-22 | 井関農機株式会社 | 収穫用車両 |
| JP7251396B2 (ja) | 2019-08-05 | 2023-04-04 | 井関農機株式会社 | 収穫用車両 |
| CN111011004A (zh) * | 2019-12-28 | 2020-04-17 | 河南理工大学 | 采摘设备 |
| CN111011004B (zh) * | 2019-12-28 | 2021-08-03 | 河南理工大学 | 采摘设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011229406A (ja) | 2011-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5494183B2 (ja) | 自動収穫装置 | |
| US9468146B2 (en) | Harvesting machine for formally trained orchards | |
| JP2010207118A (ja) | 果実収穫用エンドエフェクタ | |
| BR112019002092B1 (pt) | Sistema de gerenciamento de frota de veículo aéreo não tripulado e método computadorizado para colheita | |
| KR100784830B1 (ko) | 벤치 재배형 딸기 수확 로봇 시스템 | |
| US20060150602A1 (en) | Method and apparatus for remotely assisted harvester | |
| JP5782622B2 (ja) | 果柄切断装置 | |
| US11477942B2 (en) | Robotic fruit harvesting machine with fruit-pair picking and hybrid motorized-pneumatic robot arms | |
| US20230172109A1 (en) | Produce Picking Device, System and Method | |
| CN209983105U (zh) | 收割机 | |
| JP7067034B2 (ja) | 収穫物搬送装置 | |
| CN105766219A (zh) | 一种用于枸杞采摘的曲柄摇杆滚振机构 | |
| JP5818240B2 (ja) | 果柄切断装置 | |
| KR102542825B1 (ko) | 농작물 수확로봇 | |
| JP2024505669A (ja) | ガントリーシステムを備えたロボット収穫システム | |
| AU2010257276A1 (en) | Fruit harvesting apparatus | |
| WO2022091092A1 (en) | System and method for indoor crop management | |
| KR102219315B1 (ko) | 지면밀착식 원형 이동장치를 이용한 농산물 자동 수확로봇 | |
| JP7223659B2 (ja) | 果菜類収穫機 | |
| CN210130123U (zh) | 带有云台摄像装置的收割机 | |
| KR20180066527A (ko) | 고추 자동 수확 장치 | |
| WO2020140490A1 (zh) | 带有云台摄像装置的收割机 | |
| JP7065493B2 (ja) | 果実収穫装置 | |
| JP2020174546A (ja) | 収穫方法及び果菜収穫装置 | |
| WO2023203726A1 (ja) | 画像取得装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120117 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131022 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5494183 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |