JP5448568B2 - 安全装置付き作業機 - Google Patents
安全装置付き作業機 Download PDFInfo
- Publication number
- JP5448568B2 JP5448568B2 JP2009123599A JP2009123599A JP5448568B2 JP 5448568 B2 JP5448568 B2 JP 5448568B2 JP 2009123599 A JP2009123599 A JP 2009123599A JP 2009123599 A JP2009123599 A JP 2009123599A JP 5448568 B2 JP5448568 B2 JP 5448568B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration sensor
- safety device
- engine
- work machine
- drive source
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001133 acceleration Effects 0.000 claims description 180
- 238000001514 detection method Methods 0.000 claims description 78
- 238000002485 combustion reaction Methods 0.000 claims description 31
- 238000005259 measurement Methods 0.000 description 19
- 230000035945 sensitivity Effects 0.000 description 16
- 230000005540 biological transmission Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 6
- 239000007858 starting material Substances 0.000 description 6
- 230000008901 benefit Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 239000000446 fuel Substances 0.000 description 3
- 239000002828 fuel tank Substances 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 230000035939 shock Effects 0.000 description 3
- 238000013016 damping Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/82—Other details
- A01D34/828—Safety devices
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D75/00—Accessories for harvesters or mowers
- A01D75/20—Devices for protecting men or animals
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D75/00—Accessories for harvesters or mowers
- A01D75/20—Devices for protecting men or animals
- A01D75/206—Devices for protecting men or animals for mowers carried by operator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/008—Devices for directly stopping or interrupting the drive or gear in case of danger to the machine, e.g. devices with clutches
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T83/00—Cutting
- Y10T83/081—With randomly actuated stopping means
- Y10T83/088—Responsive to tool detector or work-feed-means detector
- Y10T83/089—Responsive to tool characteristic
Description
(1)刈払機の場合には、衝撃を受ける刃物と駆動源部との間に長尺の動力伝達シャフトが介在しているため、エンジン近傍に設置した加速度センサに作用する衝撃モーメントを最大にすることができる。
(2)エンジンは相対的に重量物であることから、作業機が地面に落下したときに駆動源部での衝撃が相対的に大きい。
(3)エンジン近傍に加速度センサを設けた場合、このエンジンの近傍にマイコンなどの制御手段が配設されていることから、加速度センサと制御手段とを接続する配線が短くて済む。
駆動源部に内燃エンジンが搭載され、該内燃エンジンからの動力を刃物に伝達して該刃物を高速で動作させることにより作業を行っている最中に予期しない状況が発生したときに前記刃物から作業者を守る安全装置を備えた作業機を前提として、
前記駆動源部に取り付けられた加速度センサと、
該加速度センサからの出力を受けて、該加速度センサが検出した加速度が閾値よりも大きいときに、前記安全装置を作動させる安全信号を出力するコントローラとを有し、
前記加速度センサが、前記内燃エンジンのシリンダボアの軸線方向に対して該加速度センサの検出軸が傾斜した姿勢で前記駆動源部に取り付けられていることを特徴とする安全装置付き作業機を提供することにより達成される。
2 操作チューブ
4 駆動源部
6 刈刃部
8 ハンドル
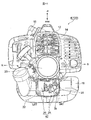
12 エンジンカバー
14 エンジン
18 点火プラグ
20 リコイルスタータ
22 衝撃検出ボックス
24 加速度センサユニット
26 コントローラ
28 ビス(センサユニットの角度調整)
30 高電圧発生回路
32 動力伝達シャフト
34 遠心クラッチ
38 ベベルギア
40 刈刃
42 安全装置
DA 加速度センサの検出軸
AS 加速度センサ
Claims (6)
- 駆動源部に内燃エンジンが搭載され、該内燃エンジンからの動力を刃物に伝達して該刃物を高速で動作させることにより作業を行っている最中に予期しない状況が発生したときに前記刃物から作業者を守る安全装置を備えた作業機であって、
前記駆動源部に取り付けられた加速度センサと、
該加速度センサからの出力を受けて、該加速度センサが検出した加速度が閾値よりも大きいときに、前記安全装置を作動させる安全信号を出力するコントローラとを有し、
前記加速度センサが、前記内燃エンジンのシリンダボアの軸線方向に対して該加速度センサの検出軸が傾斜した姿勢で前記駆動源部に取り付けられていることを特徴とする安全装置付き作業機。 - 前記作業機に対する前記加速度センサの取り付け角度が調整可能であり、これにより前記シリンダボアの軸線方向に対する検出軸の傾斜角度が調整可能である、請求項1に記載の安全装置付き作業機。
- 前記加速度センサと、前記コントローラの一部を構成し且つ前記加速度センサが検出した加速度が閾値よりも大きいときに衝撃検知信号を生成する衝撃信号生成手段と、該衝撃検知信号を所定時間保持する出力保持手段とを有する加速度センサユニットを有し、
前記コントローラは、前記加速度センサユニットからの衝撃検知信号を受けて前記安全信号を出力する、請求項1又は2に記載の安全装置付き作業機。 - 前記作業機が、刈払機、チェーンソー、ヘッジトリマから選択された一つである、請求項1〜3のいずれか一項に記載の安全装置付き作業機。
- 前記加速度センサが一軸式の加速度センサである、請求項1〜4のいずれか一項に記載の安全装置付き作業機。
- 前記コントローラから出力される安全信号によって前記内燃エンジンの動作が強制的に停止される、請求項4又は5に記載の安全装置付き作業機。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009123599A JP5448568B2 (ja) | 2009-05-21 | 2009-05-21 | 安全装置付き作業機 |
| US12/783,886 US9769984B2 (en) | 2009-05-21 | 2010-05-20 | Work apparatus with safety equipment |
| EP10163544A EP2253190A1 (en) | 2009-05-21 | 2010-05-21 | Work apparatus with safety equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009123599A JP5448568B2 (ja) | 2009-05-21 | 2009-05-21 | 安全装置付き作業機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010268731A JP2010268731A (ja) | 2010-12-02 |
| JP2010268731A5 JP2010268731A5 (ja) | 2012-05-17 |
| JP5448568B2 true JP5448568B2 (ja) | 2014-03-19 |
Family
ID=42470781
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009123599A Active JP5448568B2 (ja) | 2009-05-21 | 2009-05-21 | 安全装置付き作業機 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9769984B2 (ja) |
| EP (1) | EP2253190A1 (ja) |
| JP (1) | JP5448568B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6464357B2 (ja) * | 2014-10-11 | 2019-02-06 | 株式会社ドリーム・ワークス | チェーンソー、チェーンソー作業評価システム、およびチェーンソー作業評価方法 |
| EP3031315B1 (de) * | 2014-12-09 | 2021-09-01 | Robert Bosch GmbH | Gartengerätehandgriffvorrichtung |
| JP6683056B2 (ja) * | 2016-07-29 | 2020-04-15 | 工機ホールディングス株式会社 | 自走式作業機 |
| JP2018082682A (ja) * | 2016-11-25 | 2018-05-31 | 本田技研工業株式会社 | 作業機 |
| EP3747252A4 (en) * | 2018-03-09 | 2021-03-03 | Honda Motor Co., Ltd. | WORKING MACHINE |
| CN115509177B (zh) * | 2022-09-22 | 2024-01-12 | 成都飞机工业(集团)有限责任公司 | 一种零件加工过程异常监控方法、装置、设备及介质 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2748810A (en) * | 1955-02-21 | 1956-06-05 | Leonard M Strunk | Chain saw guide bar with lubricating means |
| US3353525A (en) * | 1965-09-07 | 1967-11-21 | Tillotson Mfg Co | Fuel feed system and throttle control for internal combustion engines |
| US3606745A (en) * | 1969-09-08 | 1971-09-21 | Massey Ferguson Ind Ltd | Grain flow rate monitor |
| JPS4845873A (ja) | 1971-10-12 | 1973-06-30 | ||
| US3923126A (en) * | 1974-06-25 | 1975-12-02 | Textron Inc | Band type brake for a chain saw |
| US4178741A (en) * | 1978-08-17 | 1979-12-18 | The Toro Company | Safety system for riding mower |
| US4553326A (en) * | 1983-01-14 | 1985-11-19 | Mcculloch Corporation | Chain saw braking system |
| JPS62198320A (ja) | 1986-02-25 | 1987-09-02 | 松下電工株式会社 | 刈払機 |
| JPH031221Y2 (ja) * | 1986-05-02 | 1991-01-16 | ||
| JPH02131822A (ja) | 1988-11-11 | 1990-05-21 | Matsushita Electric Ind Co Ltd | 微細穴プレス加工装置 |
| JPH02131822U (ja) | 1989-04-03 | 1990-11-01 | ||
| JPH0312477U (ja) | 1989-06-23 | 1991-02-07 | ||
| JP3038492B2 (ja) | 1990-10-24 | 2000-05-08 | 惣一 明井 | 草刈機の停止方法及びその装置 |
| JPH08118960A (ja) | 1994-10-24 | 1996-05-14 | Nishikawa Rubber Co Ltd | センターピラーウエザーストリップ |
| JP3576620B2 (ja) | 1995-01-12 | 2004-10-13 | 株式会社共立 | 非常用ブレーキ装置 |
| SE508267C2 (sv) * | 1996-04-04 | 1998-09-21 | Electrolux Ab | Drivenhet till ett handhållet arbetsredskap |
| DE19857061C2 (de) * | 1998-12-10 | 2000-11-02 | Hilti Ag | Verfahren und Einrichtung zur Vermeidung von Unfällen bei handgeführten Werkzeugmaschinen durch Werkzeugblockieren |
| JP2002311047A (ja) | 2001-04-10 | 2002-10-23 | Aisin Seiki Co Ltd | 加速度検知装置 |
| JP2003090846A (ja) | 2001-09-19 | 2003-03-28 | Mitsubishi Electric Corp | 加速度検出装置 |
| US20040181951A1 (en) * | 2003-03-17 | 2004-09-23 | Wittke Edward R. | Chain saw safety system |
| JP2006172984A (ja) | 2004-12-17 | 2006-06-29 | Ubukata Industries Co Ltd | 落下センサ |
| JP4491320B2 (ja) * | 2004-10-15 | 2010-06-30 | 富士重工業株式会社 | 刈払機 |
| JP4754859B2 (ja) | 2005-04-12 | 2011-08-24 | 株式会社ニッカリ | 草刈機及び電動草刈機 |
| JP2008118960A (ja) | 2006-11-15 | 2008-05-29 | Husqvarna Zenoah Co Ltd | 刈払機 |
| US20100064532A1 (en) * | 2007-07-31 | 2010-03-18 | Edward Raymond Wittke | Chain saw 3D relative positional monitoring and anti-kickback actuation system |
| US8752301B2 (en) * | 2009-04-08 | 2014-06-17 | Rex George | Chainsaw incorporating a safety device system |
| JP5448569B2 (ja) * | 2009-05-21 | 2014-03-19 | 株式会社やまびこ | 安全装置付き刈払機 |
| JP5448567B2 (ja) * | 2009-05-21 | 2014-03-19 | 株式会社やまびこ | 安全装置付き作業機 |
-
2009
- 2009-05-21 JP JP2009123599A patent/JP5448568B2/ja active Active
-
2010
- 2010-05-20 US US12/783,886 patent/US9769984B2/en active Active
- 2010-05-21 EP EP10163544A patent/EP2253190A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| US20100294616A1 (en) | 2010-11-25 |
| EP2253190A1 (en) | 2010-11-24 |
| US9769984B2 (en) | 2017-09-26 |
| JP2010268731A (ja) | 2010-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5448569B2 (ja) | 安全装置付き刈払機 | |
| JP5448567B2 (ja) | 安全装置付き作業機 | |
| JP5448568B2 (ja) | 安全装置付き作業機 | |
| AU2009286589B2 (en) | Safety device for portable tools with a heat engine, capable of stopping the operation thereof after sudden, violent movements | |
| AU2011289336B2 (en) | Kickback detection method and apparatus | |
| FI72444B (fi) | Saekerhetssystem i ett handstyrt, motordrivet handverktyg. | |
| JP6778575B2 (ja) | 作業機 | |
| US20100064532A1 (en) | Chain saw 3D relative positional monitoring and anti-kickback actuation system | |
| JP2015008693A (ja) | エンジン作業機 | |
| JP5739676B2 (ja) | 遠心クラッチを備えた携帯作業機のブレーキ装置 | |
| EP3237739B1 (en) | Internal combustion engine and method for safe starting the same | |
| CN111200927A (zh) | 电动植物切割机 | |
| CN110520614B (zh) | 内燃机 | |
| US9357702B2 (en) | Engine-powered work tool provided with stand | |
| JP2022115292A (ja) | 刈刃防護装置、刈払機及び刈払い方法 | |
| JP2022544139A (ja) | 手持ち式電動ツールにおけるツール検出 | |
| JP2021016329A (ja) | 作業機 | |
| JPH10229721A (ja) | 刈払機用カッター |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5448568 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |