JP5444968B2 - アクチュエータ及びこれを用いた光走査装置 - Google Patents
アクチュエータ及びこれを用いた光走査装置 Download PDFInfo
- Publication number
- JP5444968B2 JP5444968B2 JP2009205316A JP2009205316A JP5444968B2 JP 5444968 B2 JP5444968 B2 JP 5444968B2 JP 2009205316 A JP2009205316 A JP 2009205316A JP 2009205316 A JP2009205316 A JP 2009205316A JP 5444968 B2 JP5444968 B2 JP 5444968B2
- Authority
- JP
- Japan
- Prior art keywords
- drive
- mirror
- actuator according
- connecting portion
- support beam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 title claims description 14
- 238000005452 bending Methods 0.000 claims description 36
- 238000010586 diagram Methods 0.000 description 49
- 230000035945 sensitivity Effects 0.000 description 47
- 230000008859 change Effects 0.000 description 19
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 15
- 229910052710 silicon Inorganic materials 0.000 description 15
- 239000010703 silicon Substances 0.000 description 15
- 239000004065 semiconductor Substances 0.000 description 13
- 239000000758 substrate Substances 0.000 description 12
- 230000014509 gene expression Effects 0.000 description 11
- 229910004298 SiO 2 Inorganic materials 0.000 description 8
- 238000000034 method Methods 0.000 description 8
- 238000006073 displacement reaction Methods 0.000 description 7
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 230000033001 locomotion Effects 0.000 description 5
- 239000012141 concentrate Substances 0.000 description 4
- 238000000708 deep reactive-ion etching Methods 0.000 description 3
- 239000006185 dispersion Substances 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000010408 film Substances 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000001020 plasma etching Methods 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images




























Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/105—Scanning systems with one or more pivoting mirrors or galvano-mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/0858—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting means being moved or deformed by piezoelectric means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/18—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors
- G02B7/182—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors
- G02B7/1821—Mountings, adjusting means, or light-tight connections, for optical elements for prisms; for mirrors for mirrors for rotating or oscillating mirrors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/12—Constructional details
- H02N2/123—Mechanical transmission means, e.g. for gearing
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Micromachines (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Facsimile Scanning Arrangements (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
Description
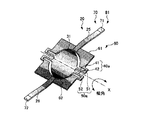
前記駆動対象物(30)を前記回転軸(X)に沿って両側から支持する1対の支持梁(40、40a、41、42)と、
前記駆動対象物(30)及び前記1対の支持梁(40、40a、41、42)を、前記回転軸(X)と直交する方向の両側から挟むように配置された1対の可動枠(60、61、62)と、
該可動枠(60、61、62)に、曲げ振動を付与する駆動源(20、20a、20b、25〜28)と、
前記1対の可動枠(60)と前記支持梁(40、40a、41、42)の先端部を、梁構造で連結し、前記曲げ振動をねじれ振動に変換して前記支持梁(40、40a、41、42)に伝達する1対の連結部(50、50a、51、52)と、を含み、
前記支持梁(40、40a、41、42)の前記先端部は、前記可動枠(60、61、62)の前記回転軸方向の幅よりも外側まで延在し、
前記連結部(50、50a、51、52)は、前記先端部から前記回転軸と交差する方向に両側に延びて、前記可動枠(60、61、62)と連結する錨形の前記梁構造を有することを特徴とする。
前記駆動対象物(30)と前記支持梁(40、40a、41、42)の連結箇所(45)に生じる角と、前記支持梁(40、40a、41、42)と前記連結部(50、50a、51、52)の連結箇所(55)に生じる角と、前記連結部(50、50a、51、52)と前記可動枠(60、61、62)の連結箇所(65)に生じる角とが、丸められていることを特徴とする。
前記駆動対象物(30)は、ミラー(31)であることを特徴とする。
光を該アクチュエータに向けて発射する光源(130)とを備え、
該アクチュエータのミラー(31)を傾動駆動させることにより、該ミラー(31)により反射された前記光を走査させることを特徴とする光走査装置。

11 シリコン基板
12、14 SiO2
13 Si活性層
15 梁
20、20a、20b 駆動源
21 圧電素子
22 圧電体
23、24 電極
30 駆動対象物
31 ミラー
40、40a、40b、40c、41、41a、42、42a 支持梁
45、45a、46、55、55a、65、75 連結箇所
50、50a、50b、50c、51、51a、52、52a 連結部
53 駆動梁側連結部
54 支持梁側連結部
60、61、62 可動枠
70、71、72、73 駆動梁
80、80a、80b、81、81a、81b 共振駆動部
90 非共振駆動源
100、101 可動部
110、111 固定枠
120、121 圧電ミラー
130 レーザダイオード
140 コリメータレンズ
150 CPU
160、170、171 ドライバIC
200 プロジェクタ
210 スクリーン
Claims (4)
- 駆動対象物を回転軸周りに傾動駆動させるアクチュエータであって、
前記駆動対象物を前記回転軸に沿って両側から支持する1対の支持梁と、
前記駆動対象物及び前記1対の支持梁を、前記回転軸と直交する方向の両側から挟むように配置された1対の可動枠と、
該可動枠に、曲げ振動を付与する駆動源と、
前記1対の可動枠と前記支持梁の先端部を、複数の梁を含む梁構造で連結し、前記曲げ振動をねじれ振動に変換して前記支持梁に伝達する1対の連結部と、を含み、
前記支持梁の前記先端部は、前記可動枠の前記回転軸方向の幅よりも外側まで延在し、
前記連結部は、前記先端部から前記回転軸と交差する方向に両側に延びて、前記可動枠と連結する錨形の前記梁構造を有する
ことを特徴とするアクチュエータ。 - 前記駆動対象物と前記支持梁の連結箇所に生じる角と、前記支持梁と前記連結部の連結箇所に生じる角と、前記連結部と前記可動枠の連結箇所に生じる角とが、丸められていることを特徴とする請求項1に記載のアクチュエータ。
- 前記駆動対象物は、ミラーであることを特徴とする請求項1又は2に記載のアクチュエータ。
- 請求項3に記載のアクチュエータと、
光を該アクチュエータに向けて発射する光源とを備え、
該アクチュエータのミラーを傾動駆動させることにより、該ミラーにより反射された前記光を走査させることを特徴とする光走査装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009205316A JP5444968B2 (ja) | 2009-05-11 | 2009-09-04 | アクチュエータ及びこれを用いた光走査装置 |
| PCT/JP2010/057096 WO2010131557A1 (ja) | 2009-05-11 | 2010-04-21 | アクチュエータ及びアクチュエータを用いた光走査装置 |
| CN201080020675.2A CN102422521B (zh) | 2009-05-11 | 2010-04-21 | 致动器及使用致动器的光扫描装置 |
| CN201410083527.5A CN103840704B (zh) | 2009-05-11 | 2010-04-21 | 致动器及使用致动器的光扫描装置 |
| US13/319,380 US8610983B2 (en) | 2009-05-11 | 2010-04-21 | Actuator and optical scanning device using actuator |
| US14/031,162 US8681404B2 (en) | 2009-05-11 | 2013-09-19 | Actuator and optical scanning device using actuator |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009114317 | 2009-05-11 | ||
| JP2009114317 | 2009-05-11 | ||
| JP2009205316A JP5444968B2 (ja) | 2009-05-11 | 2009-09-04 | アクチュエータ及びこれを用いた光走査装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013190157A Division JP5720747B2 (ja) | 2009-05-11 | 2013-09-13 | アクチュエータ及びこれを用いた光走査装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010288435A JP2010288435A (ja) | 2010-12-24 |
| JP2010288435A5 JP2010288435A5 (ja) | 2012-09-27 |
| JP5444968B2 true JP5444968B2 (ja) | 2014-03-19 |
Family
ID=43084934
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009205316A Active JP5444968B2 (ja) | 2009-05-11 | 2009-09-04 | アクチュエータ及びこれを用いた光走査装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US8610983B2 (ja) |
| JP (1) | JP5444968B2 (ja) |
| CN (2) | CN102422521B (ja) |
| WO (1) | WO2010131557A1 (ja) |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5736766B2 (ja) | 2010-12-22 | 2015-06-17 | ミツミ電機株式会社 | 光走査装置 |
| JP5666955B2 (ja) * | 2011-03-24 | 2015-02-12 | スタンレー電気株式会社 | 光偏向器 |
| WO2013111265A1 (ja) * | 2012-01-24 | 2013-08-01 | パイオニア株式会社 | アクチュエータ |
| CN104272166A (zh) * | 2012-05-07 | 2015-01-07 | 松下知识产权经营株式会社 | 光学反射元件 |
| JP6180155B2 (ja) * | 2013-04-01 | 2017-08-16 | 富士電機株式会社 | アクチュエータ |
| JP6349851B2 (ja) * | 2014-03-27 | 2018-07-04 | セイコーエプソン株式会社 | 光学デバイスおよび画像表示装置 |
| JPWO2015146144A1 (ja) * | 2014-03-28 | 2017-04-13 | 住友精密工業株式会社 | 駆動装置 |
| JP5967145B2 (ja) * | 2014-06-24 | 2016-08-10 | ミツミ電機株式会社 | 光走査装置 |
| WO2016043028A1 (ja) * | 2014-09-18 | 2016-03-24 | ミツミ電機株式会社 | 容量性負荷駆動回路および光走査装置 |
| JP6492914B2 (ja) | 2015-04-15 | 2019-04-03 | 株式会社デンソー | 光走査装置 |
| US9841163B1 (en) * | 2015-04-29 | 2017-12-12 | Cooper Technologies Company | Light redirecting flange in luminaires |
| CN105305877B (zh) * | 2015-10-30 | 2017-08-25 | 西安交通大学 | 采用轴向限位—径向箝位机构的尺蠖式压电作动器及方法 |
| IT201600079604A1 (it) * | 2016-07-28 | 2018-01-28 | St Microelectronics Srl | Struttura oscillante con attuazione piezoelettrica, sistema e metodo di fabbricazione |
| JP6814076B2 (ja) | 2017-03-14 | 2021-01-13 | 浜松ホトニクス株式会社 | 光モジュール |
| JP6455547B2 (ja) * | 2017-05-24 | 2019-01-23 | ミツミ電機株式会社 | 光走査装置 |
| JP7066982B2 (ja) * | 2017-05-30 | 2022-05-16 | 船井電機株式会社 | 光走査装置 |
| JP6924090B2 (ja) * | 2017-07-21 | 2021-08-25 | 浜松ホトニクス株式会社 | アクチュエータ装置 |
| EP3667394A4 (en) * | 2017-08-10 | 2021-04-07 | Hamamatsu Photonics K.K. | MIRROR DEVICE |
| WO2019107311A1 (ja) | 2017-12-01 | 2019-06-06 | 浜松ホトニクス株式会社 | アクチュエータ装置 |
| JP6585147B2 (ja) * | 2017-12-01 | 2019-10-02 | 浜松ホトニクス株式会社 | アクチュエータ装置 |
| JP7132481B2 (ja) * | 2018-02-23 | 2022-09-07 | ミツミ電機株式会社 | アクチュエータ及び光走査装置 |
| CN108494284B (zh) * | 2018-03-26 | 2020-09-18 | 徐明秀 | 一种微角度驱动装置的制备方法 |
| CN108428786B (zh) * | 2018-03-26 | 2020-10-02 | 浙江宝纺印染有限公司 | 一种微角度驱动装置的制备方法 |
| CN108614353B (zh) * | 2018-05-10 | 2020-08-04 | 西安交通大学 | 基于离子交换聚合金属材料的二维偏转解耦机构及其偏转方法 |
| JP7425730B2 (ja) * | 2018-08-10 | 2024-01-31 | 浜松ホトニクス株式会社 | アクチュエータ装置、及びアクチュエータ装置の製造方法 |
| KR20210047342A (ko) * | 2018-09-05 | 2021-04-29 | 베르-헬라 테르모콘트롤 게엠베하 | 촉각 피드백을 갖는 차량 조작 유닛 |
| US11221478B2 (en) | 2019-04-15 | 2022-01-11 | Microsoft Technology Licensing, Llc | MEMS scanner |
| EP3998505B1 (en) * | 2019-04-26 | 2023-07-19 | FUJIFILM Corporation | Micromirror device |
| JP6962348B2 (ja) * | 2019-05-13 | 2021-11-05 | 株式会社村田製作所 | 振動装置 |
| JP7297538B2 (ja) * | 2019-06-06 | 2023-06-26 | スタンレー電気株式会社 | 光偏向器及び製造方法 |
| CN112165273B (zh) * | 2020-09-24 | 2021-11-30 | 南京工程学院 | 基于同向偏心约束和斜压电陶瓷的耦合模态型超声波电机 |
| JP2023138058A (ja) * | 2022-03-18 | 2023-09-29 | 日東電工株式会社 | 配線回路基板 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7446911B2 (en) | 2002-11-26 | 2008-11-04 | Brother Kogyo Kabushiki Kaisha | Optical scanning apparatus and image forming apparatus |
| JP3956933B2 (ja) | 2002-11-26 | 2007-08-08 | ブラザー工業株式会社 | 光走査装置および画像形成装置 |
| JP4092283B2 (ja) * | 2003-11-17 | 2008-05-28 | スタンレー電気株式会社 | 2次元光スキャナ及び光学装置 |
| US7442918B2 (en) * | 2004-05-14 | 2008-10-28 | Microvision, Inc. | MEMS device having simplified drive |
| US7535619B2 (en) * | 2005-04-27 | 2009-05-19 | Hewlett-Packard Development Company, L.P. | Discharge of MEM devices having charge induced via focused beam to enter different states |
| JP5151065B2 (ja) * | 2006-05-19 | 2013-02-27 | コニカミノルタホールディングス株式会社 | 光スキャナ及び走査型プロジェクタ |
| JP5347963B2 (ja) * | 2007-08-27 | 2013-11-20 | パナソニック株式会社 | 圧電アクチュエータおよびこれを用いた光学反射素子および圧電駆動装置 |
-
2009
- 2009-09-04 JP JP2009205316A patent/JP5444968B2/ja active Active
-
2010
- 2010-04-21 WO PCT/JP2010/057096 patent/WO2010131557A1/ja active Application Filing
- 2010-04-21 CN CN201080020675.2A patent/CN102422521B/zh active Active
- 2010-04-21 CN CN201410083527.5A patent/CN103840704B/zh active Active
- 2010-04-21 US US13/319,380 patent/US8610983B2/en active Active
-
2013
- 2013-09-19 US US14/031,162 patent/US8681404B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US8681404B2 (en) | 2014-03-25 |
| CN102422521B (zh) | 2014-09-03 |
| US20140016170A1 (en) | 2014-01-16 |
| CN102422521A (zh) | 2012-04-18 |
| CN103840704A (zh) | 2014-06-04 |
| JP2010288435A (ja) | 2010-12-24 |
| US8610983B2 (en) | 2013-12-17 |
| US20120062970A1 (en) | 2012-03-15 |
| CN103840704B (zh) | 2016-09-14 |
| WO2010131557A1 (ja) | 2010-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5444968B2 (ja) | アクチュエータ及びこれを用いた光走査装置 | |
| JP5509742B2 (ja) | 圧電アクチュエータ及びこれを用いた光走査装置 | |
| EP2277076B1 (en) | Induced resonance comb drive scanner | |
| US9519137B2 (en) | Optical deflector including inner frame with circumferential rib and branch ribs | |
| JP5310566B2 (ja) | マイクロスキャナ装置およびマイクロスキャナ装置の制御方法 | |
| JP6516516B2 (ja) | 光偏向器 | |
| JP6333079B2 (ja) | 光スキャナ | |
| JP6024269B2 (ja) | 光走査装置 | |
| EP2749526A1 (en) | Scanning mirror device | |
| JP7363177B2 (ja) | 光偏向器、光走査システム、画像投影装置、画像形成装置、レーザレーダ | |
| JP7121258B2 (ja) | 光走査装置 | |
| US20140198260A1 (en) | Electronic device having a projector function and a vibrating mirror element | |
| JP2011069954A (ja) | 光スキャナ | |
| WO2010131556A1 (ja) | 圧電アクチュエータ | |
| JP6648443B2 (ja) | 光偏向器、2次元画像表示装置、光走査装置及び画像形成装置 | |
| JP5720747B2 (ja) | アクチュエータ及びこれを用いた光走査装置 | |
| JP2005326465A (ja) | 光偏向器 | |
| JP2008086067A (ja) | 可動構造体及びそれを備えた光学素子 | |
| JP6956019B2 (ja) | 2次元光偏向器 | |
| WO2012176492A1 (ja) | 共振駆動アクチュエーター、マイクロスキャナおよび光学機器 | |
| WO2023281993A1 (ja) | 光偏向器 | |
| JP2013003474A (ja) | マイクロスキャナ装置及び光学機器 | |
| JP2014089252A (ja) | 光走査装置 | |
| JP2019139057A (ja) | 2次元光偏向器 | |
| WO2015040956A1 (ja) | 光偏向器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120806 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120806 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130716 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130913 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5444968 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |