JP5208373B2 - 慣性力センサ - Google Patents
慣性力センサ Download PDFInfo
- Publication number
- JP5208373B2 JP5208373B2 JP2006109507A JP2006109507A JP5208373B2 JP 5208373 B2 JP5208373 B2 JP 5208373B2 JP 2006109507 A JP2006109507 A JP 2006109507A JP 2006109507 A JP2006109507 A JP 2006109507A JP 5208373 B2 JP5208373 B2 JP 5208373B2
- Authority
- JP
- Japan
- Prior art keywords
- trimming
- arms
- tuning fork
- inertial force
- force sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Gyroscopes (AREA)
- Piezo-Electric Or Mechanical Vibrators, Or Delay Or Filter Circuits (AREA)
Description
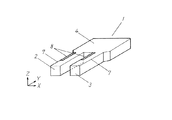
12 音叉アーム
13 音叉アーム
14 基部
15 電極
16 電極面
17 トリミング部
18 トリミング面
19 角部
Claims (4)
- 少なくとも2つのアームと、前記2つのアームを連結する基部とを有したシリコンからなる振動子を備え、
前記2つのアームは一方の面は電極を形成した電極面とし、他方の面はトリミング部を形成したトリミング面とし、前記電極は圧電薄膜の上下に上部電極および下部電極を設けてなり、
前記2つのアームの幅は同じであり、
前記トリミング部は2つのアームのそれぞれのトリミング面に角部から前記アームの幅方向に向かって1/20以上離して形成するとともに、前記2つのアームの幅方向と平行な軸をX軸とすると、X軸の正側の角部からの距離/アーム幅は前記2つのアームにおいて同じである慣性力センサ。 - 全てのアームの質量を互いに同等とした請求項1に記載の慣性力センサ。
- 前記トリミング部はレーザによって形成した請求項1に記載の慣性力センサ。
- 前記レーザの波長は355nmよりも短くした請求項3に記載の慣性力センサ。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006109507A JP5208373B2 (ja) | 2006-04-12 | 2006-04-12 | 慣性力センサ |
| CN201210001632.0A CN102589538B (zh) | 2006-04-12 | 2007-04-10 | 惯性力传感器 |
| US12/296,273 US8215190B2 (en) | 2006-04-12 | 2007-04-10 | Inertial force sensor |
| PCT/JP2007/057871 WO2007117008A1 (ja) | 2006-04-12 | 2007-04-10 | 慣性力センサ |
| EP07741307A EP1978330A4 (en) | 2006-04-12 | 2007-04-10 | INERTIAL SENSOR |
| CN2007800096464A CN101405569B (zh) | 2006-04-12 | 2007-04-10 | 惯性力传感器 |
| US13/491,943 US8590403B2 (en) | 2006-04-12 | 2012-06-08 | Inertial force sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006109507A JP5208373B2 (ja) | 2006-04-12 | 2006-04-12 | 慣性力センサ |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011071617A Division JP5209076B2 (ja) | 2011-03-29 | 2011-03-29 | 慣性力センサ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007279001A JP2007279001A (ja) | 2007-10-25 |
| JP2007279001A5 JP2007279001A5 (ja) | 2009-04-30 |
| JP5208373B2 true JP5208373B2 (ja) | 2013-06-12 |
Family
ID=38581280
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006109507A Expired - Fee Related JP5208373B2 (ja) | 2006-04-12 | 2006-04-12 | 慣性力センサ |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US8215190B2 (ja) |
| EP (1) | EP1978330A4 (ja) |
| JP (1) | JP5208373B2 (ja) |
| CN (2) | CN101405569B (ja) |
| WO (1) | WO2007117008A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5208373B2 (ja) * | 2006-04-12 | 2013-06-12 | パナソニック株式会社 | 慣性力センサ |
| JP5716557B2 (ja) * | 2011-06-14 | 2015-05-13 | セイコーエプソン株式会社 | 振動片、ジャイロセンサー、電子機器、振動片の製造方法 |
| JP2013234873A (ja) * | 2012-05-07 | 2013-11-21 | Seiko Epson Corp | 振動片およびその製造方法並びにジャイロセンサーおよび電子機器および移動体 |
| JP6435596B2 (ja) | 2013-08-09 | 2018-12-12 | セイコーエプソン株式会社 | 振動素子、振動デバイス、電子機器、および移動体 |
| CN103712720B (zh) * | 2014-01-02 | 2015-08-19 | 杭州士兰集成电路有限公司 | 电容式压力传感器和惯性传感器集成器件及其形成方法 |
| CN104826328B (zh) * | 2015-06-03 | 2016-11-09 | 苏州桀勇不锈钢制品有限公司 | 一种娱乐球杆 |
| US10190928B1 (en) * | 2016-11-17 | 2019-01-29 | X Development Llc | Flexible sensor for measuring flex or torque |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2009379C3 (de) * | 1970-02-27 | 1975-01-30 | Gebrueder Junghans Gmbh, 7230 Schramberg | Piezoelektrischer Oszillator in Form einer Stimmgabel als Zeitnormal für zeithaltende Geräte |
| JPS5379398A (en) * | 1976-12-23 | 1978-07-13 | Nec Corp | Square plate form piezoelectric vibrator |
| US5159301A (en) * | 1989-06-14 | 1992-10-27 | Murata Manufacturing Co., Ltd. | Piezoelectric resonator device of the tuning fork type |
| US5386726A (en) * | 1989-10-03 | 1995-02-07 | Akai Electric Co., Ltd. | Vibratory gyroscope |
| JPH09257490A (ja) * | 1996-03-27 | 1997-10-03 | Murata Mfg Co Ltd | 振動ジャイロ |
| JPH10163779A (ja) * | 1996-12-04 | 1998-06-19 | Ngk Insulators Ltd | 圧電部材の製造方法 |
| US6101878A (en) * | 1997-03-24 | 2000-08-15 | Denso Corporation | Angular rate sensor and method of improving output characteristic thereof |
| US5939631A (en) * | 1998-03-13 | 1999-08-17 | Bei Technologies Inc. | Low impedance single-ended tuning fork and method |
| JP3891737B2 (ja) * | 1999-04-19 | 2007-03-14 | シャープ株式会社 | 発振器及びその発振特性調整方法 |
| US6293585B1 (en) * | 1999-07-12 | 2001-09-25 | Gagetek Technologies Holdings Company | Torsional sensing load cell |
| EP1314962A4 (en) * | 2000-08-30 | 2006-06-21 | Matsushita Electric Ind Co Ltd | ANGLE SPEED SENSOR |
| JP3778809B2 (ja) * | 2001-04-13 | 2006-05-24 | 富士通メディアデバイス株式会社 | 音叉型振動ジャイロ及びその電極トリミング方法 |
| DE10139443A1 (de) * | 2001-08-10 | 2003-03-06 | Eads Deutschland Gmbh | Verfahren und Vorrichtung zum Trimmen von Sensoren mit schwingenden Strukturen |
| JP4001029B2 (ja) * | 2002-03-25 | 2007-10-31 | セイコーエプソン株式会社 | 音叉型圧電振動片及びその製造方法、圧電デバイス |
| JP2003318699A (ja) * | 2002-04-23 | 2003-11-07 | Piedekku Gijutsu Kenkyusho:Kk | 水晶ユニットとその製造方法 |
| JP3791485B2 (ja) | 2002-06-04 | 2006-06-28 | 株式会社村田製作所 | 音叉形振動子およびそれを用いた振動ジャイロおよびそれを用いた電子装置および音叉形振動子の製造方法 |
| JP2004093158A (ja) * | 2002-08-29 | 2004-03-25 | Kinseki Ltd | 圧電振動式慣性センサー素子とその製造方法及びレーザー加工装置 |
| US7043986B2 (en) * | 2003-02-05 | 2006-05-16 | Ngk Insulators, Ltd. | Vibrators and vibratory gyroscopes |
| JP4141432B2 (ja) * | 2003-11-10 | 2008-08-27 | 日本電波工業株式会社 | 音叉型水晶振動子 |
| JP4529444B2 (ja) * | 2004-01-13 | 2010-08-25 | パナソニック株式会社 | 角速度センサ |
| JP2005345404A (ja) * | 2004-06-07 | 2005-12-15 | Nec Tokin Corp | 圧電振動ジャイロ用振動子及びその製造方法 |
| JP4301200B2 (ja) * | 2004-10-20 | 2009-07-22 | セイコーエプソン株式会社 | 圧電振動片および圧電デバイス |
| JP2006166275A (ja) * | 2004-12-10 | 2006-06-22 | Seiko Epson Corp | 水晶デバイスの製造方法 |
| JP5208373B2 (ja) * | 2006-04-12 | 2013-06-12 | パナソニック株式会社 | 慣性力センサ |
| JP4709260B2 (ja) * | 2008-10-16 | 2011-06-22 | 日本電波工業株式会社 | 圧電振動片および圧電デバイス |
-
2006
- 2006-04-12 JP JP2006109507A patent/JP5208373B2/ja not_active Expired - Fee Related
-
2007
- 2007-04-10 US US12/296,273 patent/US8215190B2/en not_active Expired - Fee Related
- 2007-04-10 EP EP07741307A patent/EP1978330A4/en not_active Withdrawn
- 2007-04-10 CN CN2007800096464A patent/CN101405569B/zh not_active Expired - Fee Related
- 2007-04-10 WO PCT/JP2007/057871 patent/WO2007117008A1/ja active Application Filing
- 2007-04-10 CN CN201210001632.0A patent/CN102589538B/zh not_active Expired - Fee Related
-
2012
- 2012-06-08 US US13/491,943 patent/US8590403B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20120240678A1 (en) | 2012-09-27 |
| US8590403B2 (en) | 2013-11-26 |
| CN101405569A (zh) | 2009-04-08 |
| JP2007279001A (ja) | 2007-10-25 |
| CN102589538B (zh) | 2015-04-08 |
| CN101405569B (zh) | 2012-07-04 |
| EP1978330A4 (en) | 2010-04-14 |
| EP1978330A1 (en) | 2008-10-08 |
| US8215190B2 (en) | 2012-07-10 |
| CN102589538A (zh) | 2012-07-18 |
| WO2007117008A1 (ja) | 2007-10-18 |
| US20090120187A1 (en) | 2009-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5208373B2 (ja) | 慣性力センサ | |
| JP6160027B2 (ja) | 振動片およびジャイロセンサー並びに電子機器および移動体 | |
| JP5807344B2 (ja) | 角速度センサ及び電子機器 | |
| JP6007541B2 (ja) | 振動片およびその製造方法並びにジャイロセンサーおよび電子機器および移動体 | |
| JP6171475B2 (ja) | 振動片の製造方法 | |
| JP2007279001A5 (ja) | ||
| JP2003337025A (ja) | 振動子および振動型ジャイロスコープ | |
| JP2013024721A (ja) | 振動ジャイロ素子、ジャイロセンサー及び電子機器 | |
| JP5974629B2 (ja) | 振動片、振動片の製造方法、角速度センサー、電子機器、移動体 | |
| JP5765087B2 (ja) | 屈曲振動片、その製造方法及び電子機器 | |
| JP2007108053A (ja) | 振動子および振動型ジャイロスコープ用測定素子 | |
| JP3941736B2 (ja) | 水晶振動片とその製造方法及び水晶振動片を利用した水晶デバイス、ならびに水晶デバイスを利用した携帯電話装置および水晶デバイスを利用した電子機器 | |
| JP2008151633A (ja) | 角速度センサの製造方法 | |
| JP2008209116A (ja) | 角速度センサおよびその製造方法 | |
| JP2008224627A (ja) | 角速度センサ、角速度センサの製造方法及び電子機器 | |
| US11448505B2 (en) | Sensor element and angular velocity sensor | |
| JP5209076B2 (ja) | 慣性力センサ | |
| JP3257203B2 (ja) | 角速度検出素子の振動数調整方法と角速度検出素子 | |
| JP2004226181A (ja) | 振動ジャイロ | |
| JP2013234873A (ja) | 振動片およびその製造方法並びにジャイロセンサーおよび電子機器および移動体 | |
| JP2013167595A (ja) | 3軸角速度センサの調整方法 | |
| WO2017204057A1 (ja) | ジャイロセンサ及び電子機器 | |
| JPH10206165A (ja) | 角速度検出装置 | |
| JP2007286027A (ja) | 圧電振動子の製造方法及びこの圧電振動子を用いた振動ジャイロ | |
| JP2007080967A (ja) | チップ部品の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090316 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090316 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20090414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110208 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110330 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110426 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110623 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110823 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111101 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20111110 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20120113 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20121212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130220 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160301 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5208373 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160301 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |