JP5199824B2 - 傾斜センサおよびその製造方法 - Google Patents
傾斜センサおよびその製造方法 Download PDFInfo
- Publication number
- JP5199824B2 JP5199824B2 JP2008274496A JP2008274496A JP5199824B2 JP 5199824 B2 JP5199824 B2 JP 5199824B2 JP 2008274496 A JP2008274496 A JP 2008274496A JP 2008274496 A JP2008274496 A JP 2008274496A JP 5199824 B2 JP5199824 B2 JP 5199824B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- plating layer
- pair
- receiving elements
- protrusions
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C9/00—Measuring inclination, e.g. by clinometers, by levels
- G01C9/02—Details
- G01C9/06—Electric or photoelectric indication or reading means
-
- C—CHEMISTRY; METALLURGY
- C25—ELECTROLYTIC OR ELECTROPHORETIC PROCESSES; APPARATUS THEREFOR
- C25D—PROCESSES FOR THE ELECTROLYTIC OR ELECTROPHORETIC PRODUCTION OF COATINGS; ELECTROFORMING; APPARATUS THEREFOR
- C25D5/00—Electroplating characterised by the process; Pretreatment or after-treatment of workpieces
- C25D5/02—Electroplating of selected surface areas
- C25D5/022—Electroplating of selected surface areas using masking means
-
- C—CHEMISTRY; METALLURGY
- C25—ELECTROLYTIC OR ELECTROPHORETIC PROCESSES; APPARATUS THEREFOR
- C25D—PROCESSES FOR THE ELECTROLYTIC OR ELECTROPHORETIC PRODUCTION OF COATINGS; ELECTROFORMING; APPARATUS THEREFOR
- C25D5/00—Electroplating characterised by the process; Pretreatment or after-treatment of workpieces
- C25D5/10—Electroplating with more than one layer of the same or of different metals
- C25D5/12—Electroplating with more than one layer of the same or of different metals at least one layer being of nickel or chromium
-
- C—CHEMISTRY; METALLURGY
- C25—ELECTROLYTIC OR ELECTROPHORETIC PROCESSES; APPARATUS THEREFOR
- C25D—PROCESSES FOR THE ELECTROLYTIC OR ELECTROPHORETIC PRODUCTION OF COATINGS; ELECTROFORMING; APPARATUS THEREFOR
- C25D5/00—Electroplating characterised by the process; Pretreatment or after-treatment of workpieces
- C25D5/627—Electroplating characterised by the visual appearance of the layers, e.g. colour, brightness or mat appearance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C9/00—Measuring inclination, e.g. by clinometers, by levels
- G01C9/10—Measuring inclination, e.g. by clinometers, by levels by using rolling bodies, e.g. spheres, cylinders, mercury droplets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C9/00—Measuring inclination, e.g. by clinometers, by levels
- G01C9/02—Details
- G01C9/06—Electric or photoelectric indication or reading means
- G01C2009/066—Electric or photoelectric indication or reading means optical
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Organic Chemistry (AREA)
- Electrochemistry (AREA)
- Materials Engineering (AREA)
- Metallurgy (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Manufacture Of Switches (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Light Receiving Elements (AREA)
- Fire-Detection Mechanisms (AREA)
Description
S 回路基板
1 基板
2 ケース
2a 凹部
3 カバー
3a 天井面
4A,4B 受光素子
5 発光素子
6 転動体
7 配線パターン
7a,7b (面実装用の)端子
20a 空隙部
20b 窓
20c 素子収容部
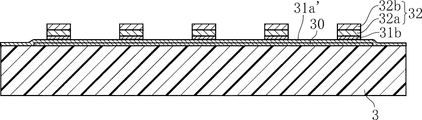
30 下地メッキ層
31 中間メッキ層
31a Ni層
31b Cu層
32 突起
32a,32b Cuメッキ層
33 上メッキ層
33a Niメッキ層
33b Auメッキ層
Claims (10)
- 検出対象面の面内方向において互いに離間配置された発光素子および1対の受光素子と、
上記面内方向における重力方向の変化により、上記発光素子からの光を上記1対の受光素子のいずれにも到達させない完全遮光位置、上記発光素子からの光を上記1対の受光素子のいずれか一方のみに到達させる1対の半遮光位置、および上記発光素子からの光を上記1対の受光素子のいずれにも到達させる非遮光位置をとる転動体と、
上記転動体を収容し、かつ上記発光素子からの光が出射される出射口および上記1対の受光素子に向けて光が入射する1対の入射口に繋がる空隙部と、
を備える傾斜センサであって、
上記面内方向に広がり上記空隙部に露出するとともに凹凸状とされた天井面を備えており、
上記転動体は、その軸方向が上記面内方向と直角である円柱形状であるとともに、
上記天井面は、それぞれの上記面内方向面積が上記転動体よりも小である複数の突起が形成された部分の表面であって、
上記各突起は、上記面内方向形状が円形であることを特徴とする、傾斜センサ。 - 検出対象面の面内方向において互いに離間配置された発光素子および1対の受光素子と、
上記面内方向における重力方向の変化により、上記発光素子からの光を上記1対の受光素子のいずれにも到達させない完全遮光位置、上記発光素子からの光を上記1対の受光素子のいずれか一方のみに到達させる1対の半遮光位置、および上記発光素子からの光を上記1対の受光素子のいずれにも到達させる非遮光位置をとる転動体と、
上記転動体を収容し、かつ上記発光素子からの光が出射される出射口および上記1対の受光素子に向けて光が入射する1対の入射口に繋がる空隙部と、
を備える傾斜センサであって、
上記面内方向に広がり上記空隙部に露出するとともに凹凸状とされた天井面を備えており、
上記転動体は、その軸方向が上記面内方向と直角である円柱形状であるとともに、
上記天井面は、それぞれの上記面内方向面積が上記転動体よりも小である複数の突起が形成された部分の表面であって、
上記複数の突起は、互いに放射状に配置された長細状のものを含むことを特徴とする、傾斜センサ。 - 上記複数の突起の配置ピッチは、上記転動体の直径よりも小である、請求項1または2に記載の傾斜センサ。
- 上記面内方向に対して直角である方向に延び、上記空隙部を囲む内側面を構成するケースと、
上記天井面を構成するカバーと、を備えており、
上記カバーには、メッキ膜によって上記複数の突起が形成されている、請求項1ないし3のいずれかに記載の傾斜センサ。 - 上記カバーには、上記カバーに直接形成されており、上記複数の突起よりも面積が大である下地メッキ層、上記複数の突起と同形状とされた中間メッキ層とが積層されており、
上記複数の突起は、上記中間メッキ層上に形成されている、請求項4に記載の傾斜センサ。 - 上記下地メッキ層および上記複数の突起は、Cuからなり、
上記中間メッキ層は、上記下地メッキ層側に位置するNi層および上記複数の突起側に位置するCu層からなる、請求項5に記載の傾斜センサ。 - 上記複数の突起および上記下地メッキ層を覆い、かつ表層がAuメッキ層からなる上メッキ層をさらに備える、請求項5または6に記載の傾斜センサ。
- 検出対象面の面内方向において互いに離間配置された発光素子および1対の受光素子と、
上記面内方向における重力方向の変化により、上記発光素子からの光を上記1対の受光素子のいずれにも到達させない完全遮光位置、上記発光素子からの光を上記1対の受光素子のいずれか一方のみに到達させる1対の半遮光位置、および上記発光素子からの光を上記1対の受光素子のいずれにも到達させる非遮光位置をとる転動体と、
上記転動体を収容し、かつ上記発光素子からの光が出射される出射口および上記1対の受光素子に向けて光が入射する1対の入射口に繋がる空隙部と、
を備える傾斜センサの製造方法であって、
板状のカバーに下地メッキ層を形成する工程と、
上記下地メッキ層を覆う中間メッキ層を形成する工程と、
上記中間メッキ層を覆う1以上の突起準備層を形成する工程と、
上記中間メッキ層の一部および上記1以上の突起準備層に対してパターニングを施すことにより、複数の突起を形成する工程と、
上記複数の突起および上記下地メッキ層を覆う上メッキ層を形成する工程と、
上記カバーを用いて上記空隙部を構成する工程と、
を有することを特徴とする、傾斜センサの製造方法。 - 上記中間メッキ層は、互いに材質が異なり、上記下地メッキ層側に位置する第1層、および上記複数の突起側に位置する第2層からなり、
上記第1層は、上記下地メッキ層と異なる材質からなり、
上記第2層は、上記突起準備層と同じ材質からなる、請求項8に記載の傾斜センサの製造方法。 - 上記複数の突起を形成する工程においては、上記第2層および上記1以上の突起準備層を選択的に除去し、かつ上記第1層を残存させるエッチングを行った後に、上記第1層を選択的に除去し、かつ上記下地メッキ層を残存させるエッチングを行う、請求項9に記載の傾斜センサの製造方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008274496A JP5199824B2 (ja) | 2008-10-24 | 2008-10-24 | 傾斜センサおよびその製造方法 |
| US12/605,047 US7950162B2 (en) | 2008-10-24 | 2009-10-23 | Tilt sensor and method for making the same |
| CN2009102054236A CN101726282B (zh) | 2008-10-24 | 2009-10-23 | 倾斜传感器及其制造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008274496A JP5199824B2 (ja) | 2008-10-24 | 2008-10-24 | 傾斜センサおよびその製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010103002A JP2010103002A (ja) | 2010-05-06 |
| JP5199824B2 true JP5199824B2 (ja) | 2013-05-15 |
Family
ID=42116105
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008274496A Expired - Fee Related JP5199824B2 (ja) | 2008-10-24 | 2008-10-24 | 傾斜センサおよびその製造方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7950162B2 (ja) |
| JP (1) | JP5199824B2 (ja) |
| CN (1) | CN101726282B (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006016523A1 (de) * | 2006-04-07 | 2007-10-11 | Osram Opto Semiconductors Gmbh | Kippsensor |
| JP5167056B2 (ja) * | 2008-10-01 | 2013-03-21 | ローム株式会社 | 傾斜センサ |
| JP2010177021A (ja) * | 2009-01-29 | 2010-08-12 | Rohm Co Ltd | 傾斜センサ |
| TW201111754A (en) * | 2009-09-28 | 2011-04-01 | Everlight Electronics Co Ltd | Tilt sensor |
| TWI410609B (zh) * | 2010-03-23 | 2013-10-01 | Edison Opto Corp | 具省電功能之傾斜感測器 |
| CN102340298A (zh) * | 2010-07-28 | 2012-02-01 | 大日科技股份有限公司 | 感应开关 |
| JP5281060B2 (ja) * | 2010-10-08 | 2013-09-04 | 添銘 周 | 電子スイッチ |
| TW201224400A (en) * | 2010-12-10 | 2012-06-16 | Everlight Electronics Co Ltd | Tilt sensor |
| WO2014021999A1 (en) * | 2012-08-01 | 2014-02-06 | Shockwatch, Inc. | Tilt indicator |
| US9146104B2 (en) * | 2012-12-31 | 2015-09-29 | Virgina Tech Intellectual Properties, Inc. | Jellyfish-inspired tilt sensor and artificial mesoglea |
| US9651373B1 (en) * | 2015-05-01 | 2017-05-16 | Don Carpenter | Gravity-based angle sensor with LED indicator |
| US10317208B2 (en) | 2017-03-03 | 2019-06-11 | Philip Schafer | Tilt sensor |
| KR102057072B1 (ko) * | 2018-12-21 | 2020-01-22 | 한국건설기술연구원 | 구조물의 기울기 변화량 측정 장치 및 이를 이용한 구조물의 기울기 변화량을 측정하는 방법 |
| CN115039155A (zh) | 2020-01-14 | 2022-09-09 | 肖克沃奇股份有限公司 | 倾斜指示器 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4401888A (en) * | 1980-07-03 | 1983-08-30 | Quentron, Inc. | Automatic sensing device for off-horizontal and off-vertical detection |
| US4450353A (en) * | 1981-09-08 | 1984-05-22 | Sundstrand Corporation | Tilt detector with pyramidal surface |
| GB2121961B (en) * | 1982-06-09 | 1985-10-02 | Jeco Kk | Angle change detector |
| JPH01128115U (ja) * | 1988-02-25 | 1989-09-01 | ||
| US5373153A (en) * | 1993-01-04 | 1994-12-13 | Motorola, Inc. | Optoelectronic tilt detector having tapered floors extending in same direction |
| JP2912341B1 (ja) * | 1998-03-25 | 1999-06-28 | 日本電気移動通信株式会社 | 傾斜・振動センサ |
| JP3829013B2 (ja) * | 1998-04-27 | 2006-10-04 | シャープ株式会社 | 傾き検出用光センサー |
| US6664534B2 (en) * | 1999-06-28 | 2003-12-16 | Pharmacia Ab | Tilt sensing device and method for its operation |
| CA2392848A1 (en) * | 2001-07-26 | 2003-01-26 | Black & Decker Inc. | Drill level indicator |
| US6836972B2 (en) * | 2003-04-01 | 2005-01-04 | Lisa Drahos | Electronic level with audible and visual indicators |
| JP2006012692A (ja) * | 2004-06-28 | 2006-01-12 | Kyocera Corp | 傾斜センサー装置 |
| TWI262296B (en) * | 2005-01-12 | 2006-09-21 | Mitac Int Corp | Electrical product and tilting control device thereof |
| JP2006292395A (ja) * | 2005-04-06 | 2006-10-26 | Akebono Brake Ind Co Ltd | 傾斜センサ |
| JP4279829B2 (ja) * | 2005-11-21 | 2009-06-17 | ローム株式会社 | 傾斜センサ |
| DE102005056736B4 (de) * | 2005-11-23 | 2008-02-21 | Sartorius Ag | Neigungssensor |
| US7497021B2 (en) * | 2006-01-24 | 2009-03-03 | Trimble Navigation Limited | Multi-axis bubble vial device |
| JP2008292172A (ja) * | 2007-05-22 | 2008-12-04 | Rohm Co Ltd | 傾斜センサ |
| JP5069981B2 (ja) * | 2007-09-05 | 2012-11-07 | ローム株式会社 | 傾斜センサ |
-
2008
- 2008-10-24 JP JP2008274496A patent/JP5199824B2/ja not_active Expired - Fee Related
-
2009
- 2009-10-23 US US12/605,047 patent/US7950162B2/en active Active
- 2009-10-23 CN CN2009102054236A patent/CN101726282B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN101726282B (zh) | 2012-05-30 |
| US7950162B2 (en) | 2011-05-31 |
| JP2010103002A (ja) | 2010-05-06 |
| CN101726282A (zh) | 2010-06-09 |
| US20100101103A1 (en) | 2010-04-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5199824B2 (ja) | 傾斜センサおよびその製造方法 | |
| JP4279829B2 (ja) | 傾斜センサ | |
| US8053800B2 (en) | Reflection-type photointerrupter | |
| JP2004319530A (ja) | 光半導体装置およびその製造方法 | |
| JP5167056B2 (ja) | 傾斜センサ | |
| KR100883410B1 (ko) | 광 포인팅장치용 광센서모듈 및 그 제조방법 | |
| JP2004363400A (ja) | 半導体装置およびその製造方法 | |
| JP5165459B2 (ja) | 傾斜センサ | |
| WO2017099022A1 (ja) | センサ用基板およびセンサ装置 | |
| JP2010114114A (ja) | 反射型フォトインタラプタ | |
| JP6659377B2 (ja) | 計測センサ用パッケージおよび計測センサ | |
| KR20170135734A (ko) | 지문 센서용 배선 기판 | |
| JP5107135B2 (ja) | 傾斜センサ | |
| JP5069981B2 (ja) | 傾斜センサ | |
| KR102522099B1 (ko) | 센서 및 이의 제조 방법 | |
| JP5005480B2 (ja) | 傾斜センサ | |
| TWI784069B (zh) | 配線電路基板 | |
| JP2008292172A (ja) | 傾斜センサ | |
| JPH08242018A (ja) | 透過型フォトインタラプタ | |
| TWI795144B (zh) | 發光二極體顯示裝置 | |
| JP5000434B2 (ja) | 傾斜センサ | |
| CN211184047U (zh) | 底座、摄像头模组及电子装置 | |
| JP2007109851A (ja) | フォトインタラプタ | |
| JP2010112915A (ja) | 傾斜センサ | |
| JP5049708B2 (ja) | 傾斜センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110927 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121012 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130208 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160215 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5199824 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |