JP5126220B2 - 歪補正制御装置及び歪補正制御方法 - Google Patents
歪補正制御装置及び歪補正制御方法 Download PDFInfo
- Publication number
- JP5126220B2 JP5126220B2 JP2009508767A JP2009508767A JP5126220B2 JP 5126220 B2 JP5126220 B2 JP 5126220B2 JP 2009508767 A JP2009508767 A JP 2009508767A JP 2009508767 A JP2009508767 A JP 2009508767A JP 5126220 B2 JP5126220 B2 JP 5126220B2
- Authority
- JP
- Japan
- Prior art keywords
- distortion correction
- burst
- distortion
- input signal
- correction coefficient
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000012937 correction Methods 0.000 title claims description 98
- 238000000034 method Methods 0.000 title claims description 31
- 230000005540 biological transmission Effects 0.000 claims description 41
- 230000003044 adaptive effect Effects 0.000 claims description 11
- 238000012545 processing Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 5
- 230000014509 gene expression Effects 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000032683 aging Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F1/00—Details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements
- H03F1/32—Modifications of amplifiers to reduce non-linear distortion
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F1/00—Details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements
- H03F1/32—Modifications of amplifiers to reduce non-linear distortion
- H03F1/3241—Modifications of amplifiers to reduce non-linear distortion using predistortion circuits
- H03F1/3247—Modifications of amplifiers to reduce non-linear distortion using predistortion circuits using feedback acting on predistortion circuits
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F3/00—Amplifiers with only discharge tubes or only semiconductor devices as amplifying elements
- H03F3/20—Power amplifiers, e.g. Class B amplifiers, Class C amplifiers
- H03F3/24—Power amplifiers, e.g. Class B amplifiers, Class C amplifiers of transmitter output stages
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F2201/00—Indexing scheme relating to details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements covered by H03F1/00
- H03F2201/32—Indexing scheme relating to modifications of amplifiers to reduce non-linear distortion
- H03F2201/3233—Adaptive predistortion using lookup table, e.g. memory, RAM, ROM, LUT, to generate the predistortion
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Nonlinear Science (AREA)
- Amplifiers (AREA)
- Transmitters (AREA)
Description
特許文献1:特開2004−112252号公報
特許文献2:特開平4−301950号公報
特許文献3:特開平9−153849号公報
特許文献4:特許3560398号公報
前記バースト歪の逆特性を有する歪補正係数を記憶する保持手段と;
前記入力信号有無の切り替わりを知らせるバースト情報の受信を契機に、前記保持手段から読み出された前記歪補正係数を前記入力信号に乗算または加算する手段と;
前記入力信号と、前の前記歪補正係数と、前記送信増幅器の出力信号としてフィードバックされる信号とに基づいて、適応アルゴリズムにより前記歪補正係数を更新し、更新した前記歪補正係数を前記保持手段に入力する更新手段とを備える。
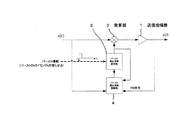
2 バースト補正係数保持部
3 乗算器
4 バースト補正係数更新部
本発明の第1の実施の形態における構成(基本構成)を示す図2を参照すると、バースト歪補正制御装置は、送信対象の入力信号x(t)のバースト性によるアンプ歪(バースト歪)を補正するために、送信増幅器(RFアンプ)1への入力信号x(t)に補正係数を乗算する(加算してもよい)構成を採っている。
図5は本発明の第2の実施の形態におけるバースト歪補正制御装置の構成を示す。この第2の実施の形態は図2に示す第1の実施の形態における基本構成を具体的構成例として示している。

図6は本発明の第3の実施の形態におけるバースト歪補正制御装置の構成を示す。この第3の実施の形態は図5に示す第2の実施の形態における具体的構成の変形例として示している。
図8は本発明の第4の実施の形態におけるバースト歪補正制御装置の構成を示す。この第4の実施の形態は図2に示す第1の実施の形態における基本構成の変形例として示している。
上述した各実施の形態におけるバースト歪補正制御装置によれば、非線形歪が生じる送信増幅器1において、信号がバースト送信された場合に生じるバースト歪の影響で劣化するACLR(Adjacent Channel Leakage Power Ratio)を改善することができる。
[変形例]
上述した各実施の形態におけるバースト歪補正は、電源投入時など、入力信号有無の切り替わりとなり得るあらゆる状況において適用することが可能である。また、調整用の矩形波信号を入力信号として使用し、高精度かつ速やかにバースト歪補正係数を生成してもよい。
Claims (8)
- 送信対象の入力信号のバーストによる送信増幅器のバースト歪を補償する歪補正制御装置であって;
前記バースト歪の逆特性を有する歪補正係数を記憶する保持手段と;
前記入力信号有無の切り替わりを知らせるバースト情報の受信を機に、前記保持手段から読み出された前記歪補正係数を前記入力信号に乗算または加算する手段と;
前記入力信号と、前の前記歪補正係数と、前記送信増幅器の出力信号としてフィードバックされる信号とに基づいて、適応アルゴリズムにより前記歪補正係数を更新し、更新した前記歪補正係数を前記保持手段に入力する更新手段とを備え;
前記保持手段から読み出されて前記入力信号に乗算または加算される前記歪補正係数は、前記入力信号有無の切り替わりからの経過時間に応じた更新補正係数である
歪補正制御装置。 - 前記適応アルゴリズムはLMS最小二乗法である
請求項1記載の歪補正制御装置。 - 前記送信増幅器の非線形歪を補償するためにディジタルプリディストーションを行う手段を更に備える
請求項1記載の歪補正制御装置。 - 前記歪補正係数を前記入力信号の平均的な大きさに応じて調整するために、前記入力信号の平均電力を求める手段を更に備える
請求項1記載の歪補正制御装置。 - 送信対象の入力信号のバーストによる送信増幅器のバースト歪を補償する歪補正制御方法であって;
前記バースト歪の逆特性を有する歪補正係数を保持手段に記憶するステップと;
前記入力信号有無の切り替わりを知らせるバースト情報の受信を機に、前記保持手段から読み出された前記歪補正係数を前記入力信号に乗算または加算するステップと;
前記入力信号と、前の前記歪補正係数と、前記送信増幅器の出力信号としてフィードバ
ックされる信号とに基づいて、適応アルゴリズムにより前記歪補正係数を更新し、更新した前記歪補正係数を前記保持手段に入力するステップとを備え;
前記保持手段から読み出されて前記入力信号に乗算または加算される前記歪補正係数は、前記入力信号有無の切り替わりからの経過時間に応じた更新補正係数である
歪補正制御方法。 - 前記適応アルゴリズムはLMS最小二乗法である
請求項5記載の歪補正制御方法。 - 前記送信増幅器の非線形歪を補償するためにディジタルプリディストーションを行うステップを更に備える
請求項5記載の歪補正制御方法。 - 前記歪補正係数を前記入力信号の平均的な大きさに応じて調整するために、前記入力信号の平均電力を求めるステップを更に備える
請求項5記載の歪補正制御方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2007/056663 WO2008126217A1 (ja) | 2007-03-28 | 2007-03-28 | 歪補正制御装置及び歪補正制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2008126217A1 JPWO2008126217A1 (ja) | 2010-07-22 |
| JP5126220B2 true JP5126220B2 (ja) | 2013-01-23 |
Family
ID=39863400
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009508767A Expired - Fee Related JP5126220B2 (ja) | 2007-03-28 | 2007-03-28 | 歪補正制御装置及び歪補正制御方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7746957B2 (ja) |
| EP (1) | EP2141800B1 (ja) |
| JP (1) | JP5126220B2 (ja) |
| KR (1) | KR101098134B1 (ja) |
| CN (1) | CN101647195B (ja) |
| WO (1) | WO2008126217A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2051390A3 (en) * | 2007-10-18 | 2011-10-19 | Fujitsu Limited | A radio transmission apparatus |
| JP5146086B2 (ja) * | 2007-10-18 | 2013-02-20 | 富士通株式会社 | 無線送信装置 |
| WO2012070988A1 (en) * | 2010-11-22 | 2012-05-31 | Telefonaktiebolaget L M Ericsson (Publ) | Digital predistortion of non-linear devices |
| US9665510B2 (en) | 2014-12-22 | 2017-05-30 | Freescale Semiconductor, Inc. | Synchronous bus architecture for digital pre-distortion system |
| US9130628B1 (en) | 2014-12-24 | 2015-09-08 | Freescale Semiconductor, Inc. | Digital pre-distorter |
| WO2016106508A1 (zh) * | 2014-12-29 | 2016-07-07 | 华为技术有限公司 | 一种数字预失真校正系数的控制方法及装置 |
| US9231530B1 (en) | 2015-01-08 | 2016-01-05 | Freescale Semiconductor, Inc. | System for calibrating power amplifier |
| US9088472B1 (en) | 2015-01-08 | 2015-07-21 | Freescale Semiconductor, Inc. | System for compensating for I/Q impairments in wireless communication system |
| JP6657595B2 (ja) * | 2015-05-13 | 2020-03-04 | 富士通株式会社 | 歪み補償装置及び歪み補償方法 |
| US9590567B2 (en) * | 2015-07-02 | 2017-03-07 | Xilinx, Inc. | Moving mean and magnitude dual path digital predistortion |
| JP2017050694A (ja) | 2015-09-01 | 2017-03-09 | 富士通株式会社 | 無線通信装置及びバースト歪み補正方法 |
| JP7288744B2 (ja) * | 2018-07-26 | 2023-06-08 | 日本無線株式会社 | 歪補償装置及び歪補償方法 |
| CN110518455B (zh) * | 2019-08-06 | 2021-01-19 | 西安交通大学 | 一种消除外腔可调谐半导体激光器内腔非线性的硬件电路 |
| CN116805868A (zh) * | 2023-06-27 | 2023-09-26 | 上海合频电子科技有限公司 | 一种任意波形发生器脉冲波形畸变的实时校正系统及方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0969733A (ja) * | 1995-08-31 | 1997-03-11 | Fujitsu Ltd | 歪補償を有する増幅器 |
| JP2006333445A (ja) * | 2005-04-26 | 2006-12-07 | Matsushita Electric Ind Co Ltd | 極座標変調回路、集積回路および無線装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04301950A (ja) | 1991-03-28 | 1992-10-26 | Oki Electric Ind Co Ltd | 線形化増幅器 |
| US5870668A (en) * | 1995-08-18 | 1999-02-09 | Fujitsu Limited | Amplifier having distortion compensation and base station for radio communication using the same |
| JP3323715B2 (ja) | 1995-11-30 | 2002-09-09 | 富士通株式会社 | 無線装置 |
| US5903823A (en) | 1995-09-19 | 1999-05-11 | Fujitsu Limited | Radio apparatus with distortion compensating function |
| US20030058959A1 (en) * | 2001-09-25 | 2003-03-27 | Caly Networks. | Combined digital adaptive pre-distorter and pre-equalizer system for modems in link hopping radio networks |
| JP4064770B2 (ja) | 2002-09-18 | 2008-03-19 | 株式会社日立国際電気 | 歪補償増幅装置 |
| JP3917509B2 (ja) * | 2002-12-06 | 2007-05-23 | 日本電信電話株式会社 | 非線形歪補償装置 |
| US20040142667A1 (en) * | 2003-01-21 | 2004-07-22 | Lochhead Donald Laird | Method of correcting distortion in a power amplifier |
| JP4641715B2 (ja) * | 2003-11-14 | 2011-03-02 | 富士通株式会社 | 歪補償装置及び無線基地局 |
| JP4230944B2 (ja) * | 2004-03-17 | 2009-02-25 | 日本電信電話株式会社 | マルチポート増幅器および歪み補償方法 |
| JP4492246B2 (ja) * | 2004-08-02 | 2010-06-30 | 富士通株式会社 | 歪み補償装置 |
| JP4652091B2 (ja) * | 2005-03-16 | 2011-03-16 | 富士通株式会社 | 歪補償装置 |
| JP4308163B2 (ja) * | 2005-03-22 | 2009-08-05 | 富士通株式会社 | 歪補償装置 |
| JP5034319B2 (ja) * | 2006-05-26 | 2012-09-26 | 富士通株式会社 | 歪補償装置及び歪補償方法 |
-
2007
- 2007-03-28 EP EP07740101A patent/EP2141800B1/en not_active Not-in-force
- 2007-03-28 CN CN2007800523869A patent/CN101647195B/zh not_active Expired - Fee Related
- 2007-03-28 WO PCT/JP2007/056663 patent/WO2008126217A1/ja active Application Filing
- 2007-03-28 JP JP2009508767A patent/JP5126220B2/ja not_active Expired - Fee Related
- 2007-03-28 KR KR1020097019140A patent/KR101098134B1/ko not_active IP Right Cessation
-
2009
- 2009-09-25 US US12/567,431 patent/US7746957B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0969733A (ja) * | 1995-08-31 | 1997-03-11 | Fujitsu Ltd | 歪補償を有する増幅器 |
| JP2006333445A (ja) * | 2005-04-26 | 2006-12-07 | Matsushita Electric Ind Co Ltd | 極座標変調回路、集積回路および無線装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100014609A1 (en) | 2010-01-21 |
| CN101647195A (zh) | 2010-02-10 |
| KR20100005018A (ko) | 2010-01-13 |
| US7746957B2 (en) | 2010-06-29 |
| EP2141800A1 (en) | 2010-01-06 |
| EP2141800B1 (en) | 2012-08-22 |
| JPWO2008126217A1 (ja) | 2010-07-22 |
| CN101647195B (zh) | 2013-03-20 |
| EP2141800A4 (en) | 2011-07-06 |
| WO2008126217A1 (ja) | 2008-10-23 |
| KR101098134B1 (ko) | 2011-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5126220B2 (ja) | 歪補正制御装置及び歪補正制御方法 | |
| EP1705801B1 (en) | Distortion compensation apparatus | |
| JP4617265B2 (ja) | 歪補償装置及び歪補償方法 | |
| JP3875707B2 (ja) | 歪補償装置 | |
| JP4863729B2 (ja) | 歪補償装置及び歪補償方法 | |
| TWI381656B (zh) | 信號處理方法及通信系統 | |
| JP5267455B2 (ja) | 歪補正制御装置及び歪補正制御方法 | |
| WO2011086752A1 (ja) | 増幅装置及び信号処理装置 | |
| JP5303809B2 (ja) | 歪補償装置 | |
| JP6340207B2 (ja) | 非線形歪み検出装置及び歪み補償電力増幅器 | |
| JP5673238B2 (ja) | 電力増幅装置、送信機及び電力増幅装置制御方法 | |
| JP2004128833A (ja) | 多面イコライザフィルタ付き歪補償装置 | |
| US9438281B2 (en) | Distortion-compensation device and distortion-compensation method | |
| JP5509455B2 (ja) | 歪補償装置 | |
| JP4755937B2 (ja) | 歪補償装置及び歪補償方法 | |
| JP2010226477A (ja) | 増幅装置 | |
| JP2013115725A (ja) | 歪補償器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120410 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121015 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5126220 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151109 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |