JP4954006B2 - クラック幅計測システム、操作装置、クラック幅計測方法、及びクラック幅計測プログラム - Google Patents
クラック幅計測システム、操作装置、クラック幅計測方法、及びクラック幅計測プログラム Download PDFInfo
- Publication number
- JP4954006B2 JP4954006B2 JP2007256488A JP2007256488A JP4954006B2 JP 4954006 B2 JP4954006 B2 JP 4954006B2 JP 2007256488 A JP2007256488 A JP 2007256488A JP 2007256488 A JP2007256488 A JP 2007256488A JP 4954006 B2 JP4954006 B2 JP 4954006B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- measurement
- crack
- imaging
- scale
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





















Landscapes
- Length Measuring Devices By Optical Means (AREA)
Description
本実施形態では、(1)床下点検システムの概略構成、(2)床下点検システムの詳細構成、(3)表示画面の構成例、(4)クラックスケール、(5)クラックスケール画像、(6)クラックスケール画像操作手順、(7)画像保存処理、(8)床下点検システムの概略動作、(9)作用・効果について説明する。
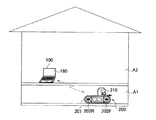
図1は、本実施形態に係る床下点検システムの概略構成図である。
次に、床下点検ロボット200及びロボット操作装置100の構成について説明する。
図3は、床下点検ロボット200の機能ブロック構成図である。図3に示すように、床下点検ロボット200は、カメラユニット210、通信装置220、センサ部230、走行用モータ240、移動制御装置250、及び電源装置260を備える。
図4は、ロボット操作装置100の機能ブロック構成図である。図4に示すように、ロボット操作装置100は、通信装置110、入力部120、制御部130、記憶部140、演算部150、図形描画部160、画像合成部170、及び表示部180を備える。
(a)クラックスケール画像の種別の選択
(b)クラックスケール画像に付された線画の拡大又は縮小
(c)クラックスケール画像が表示される表示領域(表示ウィンドウ)の移動
(d)クラックスケール画像の回転
(e)クラックスケール画像が表示される表示領域内におけるクラックスケール画像の移動
図5は、ロボット操作装置100の表示部180における表示画面構成の一例を示す図である。
クラックスケール画像SCの説明の前に、計測器具としてのクラックスケールについて簡単に説明する。
図7は、クラックスケール画像SCの構成例(表示例)を示す図である。
図7(a)及び図7(b)は、スキャナなどで取り込んだ画像や予めCAD等を用いて作成されたクラックスケール画像SCを表示する例である。
図7(b)に示すクラックスケール画像SCには、図7(a)の構成に加え、クラックスケール画像SCの表示スケールを拡大する拡大ボタンB1と、クラックスケール画像SCの表示スケールを縮小する縮小ボタンB2とが追加されている。具体的には、クラックスケール画像SCは、クラックスケール画像SCを元画像サイズの整数倍(或いは任意倍率)に変更可能である。
図7(c)は、ソフトウェアによって画素単位で描画された線画を含むクラックスケール画像SCを表示する例である。
図8は、クラックスケール画像操作手順を説明するための図である。ここでは、図7(a)に示したクラックスケール画像SCを用いる場合について説明する。
まず、図8(a)に示すように、撮像画像P上において、クラックスケール表示領域SAを移動する。その際、例えばマウスカーソルCによってクラックスケール表示領域SAを選択・移動することができる。図8(a)の例では、クラックスケール表示領域SAが、マウスカーソルCを用いて撮像画像Pの右上方向に移動している。
次に、図8(b)に示すように、クラックスケール表示領域SA内において、クラックスケール画像SCを回転し、クラックスケール画像SCを撮像画像P中のクラックCRの方向に一致させる。その際、例えばマウスカーソルCによってクラックスケール画像SCを回転することができる。図8(b)の例では、クラックスケール画像SCが、マウスカーソルCを用いて反時計回りに回転している。
次に、図8(c)に示すように、クラックスケール表示領域SA内において、クラックスケール画像SCを移動する。すなわち、撮像画像P中のクラックCRの幅に一致するクラックスケール画像SCの線幅を選択する処理である。その際、例えばマウスカーソルCによって、クラックスケール表示領域SA内においてクラックスケール画像SCを移動することができる。
図9は、画像保存処理を説明するための図である。ロボット操作装置100では、図9に示すように、撮像画像P上にクラックスケール画像SCが重ねて表示された状態の画像である合成画像を記録する。
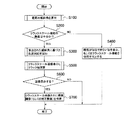
次に、図10に示すフローチャートを参照して、本実施形態に係る床下点検システムの概略動作について説明する。
本実施形態によれば、床下点検ロボット200は、カメラユニット210を具備し、撮像対象物(床下構造物)の表面(壁面WS)を撮像する。ロボット操作装置100は、クラックスケール画像SCを、床下点検ロボット200が撮像した撮像画像P上に重ねて表示する。
本実施形態では、撮像画像Pの撮像スケールと、クラックスケール画像SCの表示スケールとを一致させる動作について説明する。当該動作は、図7に示したクラックスケール画像SCに応じて異なったものとなる。
次に、図11〜図14を参照して、撮像画像Pの撮像スケールと、クラックスケール画像SCの表示スケールとを一致させる動作について説明する。
Wr=2Ltan(θ/2) ・・・(1)
S1=Wr/Wp ・・・(2)
となる。ここで、Wrは撮像画像Pの横実長さであり、Wpは撮像画像Pの横画素数である。同様にして、縦方向においても撮像スケールS1を算出可能である。この場合、撮像画像Pの縦実長さHrと、撮像画像Pの縦画素数Hpによって撮像スケールS1が算出される。
S2=(1/R)・(Dr/Dp) ・・・(3)
となる。ここで、Rはクラックスケール画像SC表示時の拡大倍率であり、Drはクラックスケール画像SCの実横長さであり、Dpはクラックスケール画像SCの横画素数である。なお、Dr/Dpは、クラックスケール画像SC毎に定まる固定値である。
S2=dr/dp ・・・(4)
となる。ここで、drはクラックスケール画像描画線幅L1の実長さであり、dpはクラックスケール画像描画線幅L1の画素数である。なお、図7(c)に示したクラックスケール画像SCでは、drをチェックボックスを選択することで固定し、dpを拡大・縮小ボタンで変化させることになる。
次に、図12のフローチャートを参照して、上述した動作パターン1について説明する。
Wr/Wp=(1/R)・(Dr/Dp)
R=(Wp/Wr)・(Dr/Dp) ・・・(5)
が成り立つ。よって、式(5)より、クラックスケール画像SC表示時の拡大倍率Rを算出することができる。
次に、図13のフローチャートを参照して、上述した動作パターン2について説明する。
Wr/Wp=(1/R)・(Dr/Dp)
Wr=Wp・(1/R)・(Dr/Dp) (R=1,2,3,...) ・・・(6)
となる。よって、式(6)より、実横長さWrを算出することができる。
θ=2tan−1{(1/2L)・Wr} ・・・(7)
となる。式(7)より、水平画角θを算出することができる。
次に、図14のフローチャートを参照して、上述した動作パターン3について説明する。
Wr/Wp=dr/dp
Wr=Wp・(dr/dp) ・・・(8)
となる。よって、式(8)より、実横長さWrを算出することができる。
本実施形態によれば、表示スケールと撮像スケールとが一致するように、表示スケールを調整するので、クラックスケール画像SCを撮像スケールと同一スケールの表示スケールとすることができ、クラック幅の計測精度が向上する。
本実施形態では、図10のステップS300の詳細な処理内容、具体的には、クラックスケール機能の精度が不十分である場合のクラック幅の誤差対応動作について説明する。
次に、図16〜図19を参照して、誤差対応動作の動作パターン1及び動作パターン2について説明する。
図16は、誤差対応動作の動作パターン1を説明するための概念図である。
図18は、誤差対応動作の動作パターン2を説明するための概念図である。
本実施形態によれば、カメラ211の光軸が撮像対象物(壁面WS)表面の法線方向に一致するように床下点検ロボット200を制御するので、計測誤差が低減し、クラック幅の計測精度が向上する。
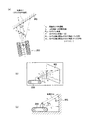
本実施形態では、図10のステップS100の詳細な処理内容、具体的には、カメラ211の光軸と壁面WSとのなす角度φp(以下、適宜「傾斜角」という)の算出動作について説明する。
次に、図20〜図25を参照して、傾斜角算出動作の動作パターン1〜3について説明する。
図20は、傾斜角算出動作の動作パターン1を説明するための概念図である。
φt=(π/2)−θt ・・・(9)
ln=rncosθt ・・・(10)
によって算出される。lnとθpnとによってφpが算出される。
図22は、傾斜角算出動作の動作パターン2を説明するための概念図である。
α=tan−1{W/(lr−ll)} ・・・(11)
により算出される。
φp=α−θp ・・・(12)
となる。その他の動作は、動作パターン1と同様である。
図24は、傾斜角算出動作の動作パターン3を説明するための概念図である。
bn=a+ln ・・・(13)
によって算出される。
本実施形態によれば、カメラ211のフォーカス値や、距離センサSR,SL、カメラ211のパン・チルト角度を用いて、カメラ211の光軸に対する壁面WSの傾斜角を精度良く算出することができる。
本実施形態では、図10のステップS400の詳細な処理内容、具体的には、クラックスケール機能の精度を保証できない場合の動作について説明する。
上記のように、本発明は第1〜第5実施形態によって記載したが、この開示の一部をなす論述及び図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例及び運用技術が明らかとなる。
Claims (9)
- 撮像装置を具備し、撮像対象物を撮像する移動体と、
前記移動体を遠隔操作する操作装置と
を備え、
撮像対象物の表面に生じたクラックの幅を計測するクラック幅計測システムであって、
前記移動体が撮像対象物を撮像することによって得られた撮像画像のデータを取得する撮像画像取得部と、
クラック幅の計測に用いられる線画及び数字が付された計測用画像のデータを取得する計測用画像取得部と、
前記撮像画像取得部によって取得された前記撮像画像のデータと、前記計測用画像取得部によって取得された前記計測用画像のデータとを合成することによって、合成画像データを生成する画像合成部と、
前記画像合成部によって生成された前記合成画像データに応じて、前記撮像画像及び前記計測用画像を表示する表示部と
を備え、
前記画像合成部は、前記表示部において前記計測用画像が前記撮像画像上に重ねて表示されるように、前記合成画像データを生成することを特徴とするクラック幅計測システム。 - ユーザからの入力を受付ける操作受付け部と、
前記操作受付け部が受付けた入力に応じて、前記計測用画像を操作する計測用画像操作部と
をさらに備え、
前記計測用画像操作部は、
前記計測用画像の種別の選択、
前記計測用画像に付された線画の拡大又は縮小、
前記計測用画像が表示される表示領域の移動、
前記計測用画像の回転、
又は前記計測用画像が表示される表示領域内における前記計測用画像の移動
の少なくとも1つを実行することを特徴とする請求項1に記載のクラック幅計測システム。 - 撮像スケールに基づいて、表示スケールを調整する表示スケール調整部をさらに備え、
前記撮像スケールは、前記撮像画像の1画素に対する、前記撮像装置が撮像した範囲内における撮像対象物の実際の長さの比であり、
前記表示スケールは、前記計測用画像の1画素に対する、前記計測用画像が示す実際の長さの比であり、
前記表示スケール調整部は、前記表示スケールと前記撮像スケールとが一致するように、前記表示スケールを調整することを特徴とする請求項1又は2に記載のクラック幅計測システム。 - 表示スケールと撮像スケールとに基づいて、前記撮像装置のズーム率を制御するズーム率調整部をさらに備え、
前記表示スケールは、前記計測用画像の1画素に対する、前記計測用画像が示す実際の長さの比であり、
前記撮像スケールは、前記撮像画像の1画素に対する、前記撮像装置が撮像した範囲内における撮像対象物の実際の長さの比であり、
前記ズーム率調整部は、前記撮像スケールと前記表示スケールとが一致するように、前記ズーム率を調整することを特徴とする請求項1又は2に記載のクラック幅計測システム。 - 平面視において、前記撮像装置の光軸と、撮像対象物とのなす角度を計測する角度計測部と、
前記角度計測部によって計測された角度に応じて、前記撮像装置の光軸と撮像対象物とのなす角度が許容角度範囲内に収まるように前記移動体を制御する移動体制御部と
をさらに備えることを特徴とする請求項1〜4のいずれか1項に記載のクラック幅計測システム。 - 前記撮像画像上に前記計測用画像が重ねて表示された状態の画像である合成画像のデータを記録する合成画像記録部をさらに備えることを特徴とする請求項1〜5のいずれか1項に記載のクラック幅計測システム。
- 撮像対象物を撮像する移動体を遠隔操作する操作装置であって、
前記移動体が撮像対象物を撮像することによって得られた撮像画像のデータを取得する撮像画像取得部と、
クラック幅の計測に用いられる線画及び数字が付された計測用画像のデータを取得する計測用画像取得部と、
前記撮像画像取得部によって取得された前記撮像画像のデータと、前記計測用画像取得部によって取得された前記計測用画像のデータとを合成することによって、合成画像データを生成する画像合成部と、
前記画像合成部によって生成された前記合成画像データに応じて前記撮像画像及び前記計測用画像を表示する表示部と
を備え、
前記画像合成部は、前記表示部において前記計測用画像が前記撮像画像上に重ねて表示されるように、前記合成画像データを生成することを特徴とする操作装置。 - 撮像対象物を撮像する移動体と、
前記移動体を遠隔操作する操作装置と
を用いたクラック幅計測方法であって、
前記移動体が撮像対象物を撮像することによって得られた撮像画像のデータを取得するステップと、
クラック幅の計測に用いられる線画及び数字が付された計測用画像のデータを取得するステップと、
取得された前記撮像画像のデータと、取得された前記計測用画像のデータとを合成することによって、合成画像データを生成するステップと、
生成された前記合成画像データに応じて、前記撮像画像及び前記計測用画像を表示するステップと
を備え、
前記生成するステップでは、前記表示するステップにおいて前記計測用画像が前記撮像画像上に重ねて表示されるように、前記合成画像データを生成することを特徴とするクラック幅計測方法。 - 撮像対象物を撮像する移動体を遠隔操作する操作装置として機能するコンピュータに、
前記移動体が撮像対象物を撮像することによって得られた撮像画像のデータを取得する手順と、
クラック幅の計測に用いられる線画及び数字が付された計測用画像のデータを取得する手順と、
取得された前記撮像画像のデータと、取得された前記計測用画像のデータとを合成することによって、合成画像データを生成する手順と、
生成された前記合成画像データに応じて、前記撮像画像及び前記計測用画像を表示する手順と
を実行させ、
前記生成する手順では、前記表示する手順において前記計測用画像が前記撮像画像上に重ねて表示されるように、前記合成画像データを生成することを特徴とするクラック幅計測プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007256488A JP4954006B2 (ja) | 2007-09-28 | 2007-09-28 | クラック幅計測システム、操作装置、クラック幅計測方法、及びクラック幅計測プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007256488A JP4954006B2 (ja) | 2007-09-28 | 2007-09-28 | クラック幅計測システム、操作装置、クラック幅計測方法、及びクラック幅計測プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009085785A JP2009085785A (ja) | 2009-04-23 |
| JP4954006B2 true JP4954006B2 (ja) | 2012-06-13 |
Family
ID=40659391
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007256488A Expired - Fee Related JP4954006B2 (ja) | 2007-09-28 | 2007-09-28 | クラック幅計測システム、操作装置、クラック幅計測方法、及びクラック幅計測プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4954006B2 (ja) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010281631A (ja) * | 2009-06-03 | 2010-12-16 | Zenkoku Nama Concrete Kogyo Kumiai Rengokai | 品質検査方法および品質検査装置 |
| JP5650942B2 (ja) * | 2010-07-08 | 2015-01-07 | トピー工業株式会社 | 点検システムおよび点検方法 |
| KR101124279B1 (ko) * | 2010-09-29 | 2012-03-27 | 한국전력공사 | 균열 폭 측정용 레퍼런스 gui 제공방법 및 이를 적용한 전자기기 |
| JP5849462B2 (ja) * | 2011-06-28 | 2016-01-27 | 富士通株式会社 | 寸法測定装置、寸法測定方法および寸法測定プログラム |
| JP5957250B2 (ja) * | 2012-03-15 | 2016-07-27 | 株式会社計測リサーチコンサルタント | クラック検出方法、クラック表示装置 |
| JP5531148B1 (ja) * | 2013-08-09 | 2014-06-25 | ジビル調査設計株式会社 | 構造物の点検装置 |
| WO2017002511A1 (ja) * | 2015-06-29 | 2017-01-05 | 富士フイルム株式会社 | 撮像装置及び撮像方法 |
| WO2017002512A1 (ja) | 2015-06-30 | 2017-01-05 | 富士フイルム株式会社 | 移動式撮像装置及び移動式撮像方法 |
| JP6412474B2 (ja) * | 2015-09-03 | 2018-10-24 | 株式会社 日立産業制御ソリューションズ | クラック幅計測システム |
| WO2017122641A1 (ja) * | 2016-01-15 | 2017-07-20 | 富士フイルム株式会社 | 計測支援装置及び計測支援方法 |
| CN108476282B (zh) * | 2016-01-22 | 2020-07-17 | 富士胶片株式会社 | 摄影辅助装置及摄影辅助方法 |
| JP6626970B2 (ja) * | 2016-06-14 | 2019-12-25 | 富士フイルム株式会社 | サーバ装置、画像処理システム及び画像処理方法 |
| JP6612685B2 (ja) * | 2016-06-20 | 2019-11-27 | 富士フイルム株式会社 | 計測支援装置及び計測支援方法 |
| JP6612689B2 (ja) * | 2016-06-28 | 2019-11-27 | 富士フイルム株式会社 | 計測支援装置及び計測支援方法 |
| JP6899436B2 (ja) * | 2017-06-14 | 2021-07-07 | 株式会社ニコン・トリンブル | 算出システム、プログラム及びターゲット |
| JP7286126B2 (ja) * | 2017-10-18 | 2023-06-05 | 大斗有限会社 | ひび割れ寸法測定装置及びひび割れ寸法測定方法 |
| JP7073828B2 (ja) * | 2018-03-22 | 2022-05-24 | オムロン株式会社 | 外観検査システム、設定装置および検査方法 |
| JP7330710B2 (ja) | 2018-04-26 | 2023-08-22 | キヤノン株式会社 | 情報処理装置、情報処理方法及びプログラム |
| JP2020034405A (ja) * | 2018-08-29 | 2020-03-05 | 大和ハウス工業株式会社 | 検査装置及び検査方法 |
| JP7211271B2 (ja) * | 2019-06-10 | 2023-01-24 | 富士通株式会社 | 画像選択方法、画像選択プログラム、および画像選択装置 |
| JP6958872B2 (ja) * | 2019-07-12 | 2021-11-02 | 西日本高速道路株式会社 | ひび割れ幅測定装置、ひび割れ幅測定プログラムおよびひび割れ幅測定方法 |
| JP7151652B2 (ja) * | 2019-07-18 | 2022-10-12 | 株式会社デンソー | ひび割れ幅計測装置 |
| KR102259666B1 (ko) * | 2020-08-24 | 2021-06-02 | 에이아이안전연구원 주식회사 | 탈부착 가능한 점착식 크랙 스케일 |
| CN112068198B (zh) * | 2020-08-24 | 2022-03-18 | 西南科技大学 | 基于地震波全波形特征的裂缝破裂尺度的描述方法 |
| CN112068197B (zh) * | 2020-08-24 | 2022-03-18 | 西南科技大学 | 基于地震波动力学参数的裂缝破裂尺度的描述方法 |
| CN113959339A (zh) * | 2021-09-03 | 2022-01-21 | 武汉卓目科技有限公司 | 获取裂缝宽度的方法、装置以及裂缝监测仪及监测系统 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63307305A (ja) * | 1987-06-09 | 1988-12-15 | Kawasaki Heavy Ind Ltd | テレビ画像の被写体スケ−ル表示方法 |
| JPH087157B2 (ja) * | 1988-01-30 | 1996-01-29 | 鹿島建設株式会社 | コンクリート表面のひび割れ測定方法 |
| JPH01291382A (ja) * | 1988-05-19 | 1989-11-22 | Tokyo Electric Power Co Inc:The | 画像読取方法 |
| US4980763A (en) * | 1989-06-12 | 1990-12-25 | Welch Allyn, Inc. | System for measuring objects viewed through a borescope |
| JPH04105005A (ja) * | 1990-08-27 | 1992-04-07 | Toshiba Corp | 画像表示装置 |
| JP3055827B2 (ja) * | 1991-09-30 | 2000-06-26 | オリンパス光学工業株式会社 | 撮像手段を用いた対象物の検査方法 |
| JP2531488B2 (ja) * | 1993-08-10 | 1996-09-04 | 株式会社機動技研 | 管内測定方法 |
| JPH10281728A (ja) * | 1997-04-02 | 1998-10-23 | Minolta Co Ltd | 画像データ処理装置及び撮影装置 |
| JP2001280960A (ja) * | 2000-03-29 | 2001-10-10 | Nkk Corp | 遠隔計測方法及び装置 |
| JP2001359126A (ja) * | 2000-06-16 | 2001-12-26 | Sony Corp | 光軸傾斜角度検出装置とそれを備えた画像測定装置 |
| JP2002162361A (ja) * | 2000-11-22 | 2002-06-07 | Matsushita Electric Ind Co Ltd | 構造物の損傷検出装置 |
| JP2003214827A (ja) * | 2002-01-29 | 2003-07-30 | Ohbayashi Corp | 画像処理によるひび割れの計測方法 |
| JP2005310044A (ja) * | 2004-04-26 | 2005-11-04 | Constec Engi Co | データ処理装置、データ処理方法、及びデータ処理プログラム |
| JP2007147506A (ja) * | 2005-11-29 | 2007-06-14 | Fujifilm Corp | 配管検査システム及びそれに用いる自走式配管検査装置 |
-
2007
- 2007-09-28 JP JP2007256488A patent/JP4954006B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009085785A (ja) | 2009-04-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4954006B2 (ja) | クラック幅計測システム、操作装置、クラック幅計測方法、及びクラック幅計測プログラム | |
| CN109552665B (zh) | 用于使用悬索平台测量和检查结构的方法 | |
| JP4607095B2 (ja) | 測量機器において画像処理を行う方法と装置 | |
| JP5204955B2 (ja) | 三次元レーザスキャナのスキャニング方法 | |
| JP5322789B2 (ja) | モデル生成装置、モデル生成方法、モデル生成プログラム、点群画像生成方法および点群画像生成プログラム | |
| US7746377B2 (en) | Three-dimensional image display apparatus and method | |
| JP5370398B2 (ja) | 画像処理装置および画像処理プログラム | |
| JP2009508122A (ja) | 測量装置を使用して測量データを供給する方法 | |
| US20060268108A1 (en) | Video surveillance system, and method for controlling the same | |
| JP2005031085A (ja) | 製造部品のキズを解析し、識別するシステム及び方法 | |
| JPH08237407A (ja) | 画像タイルの相対的なアラインメントを見当合わせすると共に透視歪みを修正するための方法 | |
| JP2011066788A (ja) | 投写型表示装置、キーストン補正方法 | |
| JP2009123061A (ja) | ロボット位置検出システム | |
| CN111457848B (zh) | 通过相邻监测点间坐标变化而测定位移量的方法及系统 | |
| JP2007071660A (ja) | 遠隔検査における作業位置計測方法およびその装置 | |
| JP2007120993A (ja) | 物体形状測定装置 | |
| JPWO2020003497A1 (ja) | 撮像装置の校正装置、監視装置、作業機械および校正方法 | |
| WO2011118476A1 (ja) | 3次元距離計測装置及びその方法 | |
| JP7386592B2 (ja) | 建設機械の操作補助システム | |
| JP2017227595A (ja) | 損傷図作成支援システム及び損傷図作成支援方法 | |
| WO2017168737A1 (ja) | 欠陥画像表示制御装置及びプログラム | |
| JP2006352495A (ja) | 遠隔指示システム | |
| JP2005275327A (ja) | 投射表示装置 | |
| JP6503278B2 (ja) | 形状測定装置および形状測定方法 | |
| JP2011243076A (ja) | 対象管理画像生成装置及び対象管理画像生成プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100831 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120214 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120313 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150323 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |