JP4928343B2 - 基板処理装置 - Google Patents
基板処理装置 Download PDFInfo
- Publication number
- JP4928343B2 JP4928343B2 JP2007120078A JP2007120078A JP4928343B2 JP 4928343 B2 JP4928343 B2 JP 4928343B2 JP 2007120078 A JP2007120078 A JP 2007120078A JP 2007120078 A JP2007120078 A JP 2007120078A JP 4928343 B2 JP4928343 B2 JP 4928343B2
- Authority
- JP
- Japan
- Prior art keywords
- brush
- load
- substrate
- wafer
- cleaning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
- H01L21/67028—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like
- H01L21/6704—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing
- H01L21/67046—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing using mainly scrubbing means, e.g. brushes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B1/00—Cleaning by methods involving the use of tools
- B08B1/30—Cleaning by methods involving the use of tools by movement of cleaning members over a surface
- B08B1/32—Cleaning by methods involving the use of tools by movement of cleaning members over a surface using rotary cleaning members
- B08B1/36—Cleaning by methods involving the use of tools by movement of cleaning members over a surface using rotary cleaning members rotating about an axis orthogonal to the surface
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67259—Position monitoring, e.g. misposition detection or presence detection
Landscapes
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Physics & Mathematics (AREA)
- Power Engineering (AREA)
- Cleaning Or Drying Semiconductors (AREA)
- Manufacturing Of Magnetic Record Carriers (AREA)
- Manufacturing Optical Record Carriers (AREA)
- Liquid Crystal (AREA)
- Preparing Plates And Mask In Photomechanical Process (AREA)
- Cleaning In General (AREA)
Description
基板の周縁部の洗浄に関する先行技術として、たとえば、特許文献1で提案されている装置を挙げることができる。この装置には、基板を保持して回転する回転台と、基板の端面を洗浄するための円筒状のブラシとが備えられている。洗浄処理の開始前は、回転台から離れた待機位置にブラシが配置されている。洗浄処理が開始されると、ブラシは、待機位置から回転台に保持されている基板の周端面に当接する位置に移動される。そして、基板の端面にブラシの周面が当接した状態で、その基板を保持している回転台が回転される。これにより、基板の端面とブラシとが摺擦し、ブラシによって基板の端面が洗浄される。
この構成によれば、ブラシは、基板保持手段に保持された基板の表面に垂直な縦方向に対して傾斜する洗浄面を有している。そのため、この洗浄面が基板の表面または裏面と周端面とに跨って接触すると、この接触による基板の表面または裏面からの反力をブラシが受けるので、接触の前後でブラシに対して縦方向に加わる荷重が変化する。したがって、基準位置に配置されたブラシが基板保持手段に保持された基板と接触するように、その基準位置が設定されていれば、ブラシに対して縦方向に加わる荷重を検出するための荷重検出手段の出力に基づいて、ブラシが基準位置に配置されたか否かを判断することができ、基板の周縁部に対するブラシの接触を検出することができる。
この発明では、前記基準位置は、前記ブラシが当該基準位置に配置された状態で、前記基板保持手段に保持された基板の表面または裏面と周端面とがなす角部が前記洗浄面に所定量だけ食い込むような位置である。
請求項2に記載のように、前記基板処理装置は、前記ブラシが前記処理時位置に配置されているときに、前記荷重検出手段により検出される荷重が所定の荷重範囲内であるか否かを判断する第2判断手段(68,S21)を備えていることが好ましい。
洗浄面が縦方向に延びる中心軸線まわりに回転対称な形状を有しているので、基板の周縁部に洗浄面を接触させた状態で、ブラシを中心軸線まわりに回転させることができる。そして、ブラシを回転させることにより、基板の周縁部をスクラブすることができる。その結果、基板の周縁部を一層良好に洗浄することができる。
このような第1部分および第2部分を洗浄面に有する構成では、第1部分を基板の表面の周縁領域および周端面に接触させることができ、また、第2部分を基板の裏面の周縁領域および周端面に接触させることができる。これにより、基板の両面の周縁領域および周端面を洗浄することができる。
図1は、本発明の一実施形態に係る基板処理装置の概略構成を示す平面図である。また、図2は、図1に示す基板処理装置の内部の図解的な側面図である。
この基板処理装置1は、基板の一例としての半導体ウエハ(以下、単に「ウエハ]という。)Wを1枚ずつ処理する枚葉型の装置である。基板処理装置1は、隔壁で区画された処理室2内に、ウエハWをほぼ水平に保持して回転させるためのスピンチャック3と、ウエハWの表面(デバイスが形成される側の表面)に処理液を供給するための表面ノズル4と、ウエハWの裏面に処理液を供給するための裏面ノズル5と、ウエハWの周縁部を洗浄するためのブラシ機構6とを備えている。
スピンチャック3は、真空吸着式チャックである。このスピンチャック3は、ほぼ鉛直な方向に延びたスピン軸7と、このスピン軸7の上端に取り付けられて、ウエハWをほぼ水平な姿勢でその裏面(下面)を吸着して保持する吸着ベース8と、スピン軸7と同軸に結合された回転軸を有するスピンモータ9とを備えている。これにより、ウエハWの裏面が吸着ベース8に吸着保持された状態で、スピンモータ9が駆動されると、ウエハWがスピン軸7の中心軸線まわりに回転する。
ブラシ機構6は、ブラシ16と、このブラシ16を先端に保持した揺動アーム17と、この揺動アーム17をウエハWの回転範囲外に設定した鉛直軸線まわりに水平方向に沿って揺動させる揺動駆動機構18と、揺動アーム17を昇降させる昇降駆動機構19とを備えている。
ブラシ16は、ブラシホルダ20に保持されている。このブラシホルダ20は、後述するホルダ取付部36に取り付けられている。ブラシホルダ20は、略円柱状の樹脂ブロック21と、樹脂ブロック21の中心軸線上に配置され、上端部が樹脂ブロック21の下面に挿入されて固定された芯材22と、この芯材22の下端に取り付けられたプレート23とを備えている。樹脂ブロック21の上面には、周面にねじが切られたねじ部24が一体的に形成されている。また、芯材22の下端部には、ねじ孔が形成されている。このねじ孔にプレート23の中心を貫通するボルト25がねじ込まれることによって、プレート23が芯材22に着脱可能に取り付けられている。
回転軸35の下ケーシング30から突出する下端部には、ブラシホルダ20が取り付けられるホルダ取付部36が設けられている。このホルダ取付部36は、回転軸35が挿通されて、回転軸35に固定された円板状の上面部37と、この上面部37の周縁から下方に向けて延びる円筒状の側面部38とを一体的に備えている。側面部38の内周面には、ねじが切られている。このねじとブラシホルダ20のねじ部24に形成されているねじとを螺合させることによって、ブラシホルダ20をホルダ取付部36に取り付けることができる。
下ガイドローラ支持部材39は、回転軸35の周面との間に微小な間隔を隔てて、回転軸35に非接触状態で外嵌されている。この下ガイドローラ支持部材39は、回転軸35の中心軸線まわりに回転対称な形状を有している。下ガイドローラ支持部材39は、互いに間隔を隔てて配置された2個のベアリング42を介して、下ケーシング30の他端部に回転自在に支持されている。また、下ガイドローラ支持部材39の上端部は、その下方の部分よりも小径な円筒状に形成されており、この円筒状の上端部には、ブラシ自転機構32の後述するプーリ54が相対回転不能に外嵌されている。
ばね係止部材41は、上ガイドローラ支持部材40の上方に、上ガイドローラ支持部材40と間隔を隔てて設けられ、回転軸35に対して固定されている。このばね係止部材41には、コイルばね44の一端(上端)が係止されている。コイルばね44は、ばね係止部材41と上ガイドローラ支持部材40との間に介在されている。コイルばね44の他端(下端)は、上ガイドローラ支持部材40に係止されている。
なお、下ガイドローラ支持部材39の外周面と下ケーシング30との間は、磁性流体シール49によりシールされている。また、下ガイドローラ支持部材39の内周面と回転軸35との間は、ベローズ50によりシールされている。これにより、処理室2内の処理液や洗浄液を含む雰囲気が下ケーシング30および上ケーシング31によって形成される内部空間に進入することが防止されている。また、その内部空間内で発生するごみの処理室2側への拡散が防止されている。
下ケーシング30の底面から上方に向かって、側面視略L字状の支持板58が延びている。この支持板58には、シリンダ取付板59が支持されている。シリンダ取付板59は、支持板58から当接部材48の上方に向けて延びている。シリンダ取付板59には、ロッド57を挿通させるためのロッド挿通孔60が形成されている。エアシリンダ56は、ロッド57がロッド挿通孔60に挿通された状態で、その本体がシリンダ取付板59の上面に固定されている。ロッド挿通孔60を挿通するロッド57の下端は、当接部材48に当接している。
一方、当接部材48には、荷重検出用アーム66が固定されている。この荷重検出用アーム66は、当接部材48から圧力センサ65の上方に向けて延びている。第2エア供給配管63からエアシリンダ56の本体内に供給されるエアの圧力により、ロッド57に下方向の一定荷重以上の荷重が付加された状態(ロッド57がエアシリンダ56から一定量以上進出した状態)で、圧力センサ65に対して、そのロッド57に付加されている荷重に相当する圧で接触する。これにより、圧力センサ65は、エアシリンダ56から回転軸35などを介してブラシ16に付加される鉛直方向の荷重を検出することができる。
基板処理装置1は、たとえば、マイクロコンピュータで構成される制御部67を備えている。マイクロコンピュータには、CPU68およびメモリ69などが含まれる。メモリ69には、後述する洗浄幅−押込量−荷重テーブルが格納されている。
制御部67には、圧力センサ65の検出信号が入力されるようになっている。また、制御部67には、レシピ(ウエハWの処理のための各種条件)を入力するためのレシピ入力キー70が接続されている。そして、制御部67には、スピンモータ9、処理液バルブ12、揺動駆動機構18、昇降駆動機構19、ブラシモータ52およびシリンダバルブ62などが制御対象として接続されている。
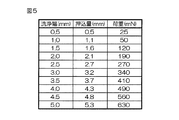
洗浄幅−押込量−荷重テーブルは、各処理時位置ごとに、ウエハWの裏面の周縁領域14におけるブラシ16による洗浄幅、基準位置から処理時位置までブラシ16を移動させたときのウエハWに対するブラシ16の押込量、およびブラシ16がウエハWに接触していない状態でブラシ16に加えられている荷重(後述する初期荷重)と処理時位置においてブラシ16に加わる荷重との差(以下、単に「荷重変化量」という。)とを対応づけて作成されたテーブルである。
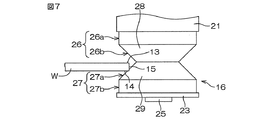
図6は、基板処理装置1におけるウエハWの周縁部の洗浄処理を説明するための工程図である。また、図7、図8および図9は、ウエハWの処理中におけるブラシ16の状態を示す側面図である。
ウエハWの裏面の周縁領域14および周端面15に対する裏面側洗浄処理が所定時間にわたって続けられると、制御部67により昇降駆動機構19が制御されて、ブラシ16が所定量だけ上昇される。このブラシ16の上昇により、図9に示すように、ブラシ16が表面側洗浄処理時の処理時位置に配置され、ブラシ16の第1洗浄面28がウエハWに接触し、第2洗浄面29に対するウエハWの押込量と同じ押込量で、ウエハWの表面と周端面15との角部が第1洗浄面28に押し込まれる。その結果、第1洗浄面28は、ウエハWの表面の周縁領域13および周端面15に接触する(ステップS5)。このとき、ウエハWの表面の周縁領域13に対しては、レシピ入力キー70から入力された洗浄幅で第1洗浄面28が接触する。
こうしてウエハWの周縁部が洗浄されている間、ウエハWの表面に供給される処理液により、ウエハWの表面の中央領域(デバイス形成領域)に付着した汚染を洗い流すことができる。
ウエハWの高速回転が所定時間にわたって続けられると、スピンモータ9が停止されて、スピンチャック3によるウエハWの回転が停止される(ステップS9)。そして、ウエハWが静止した後、その処理済みのウエハWが処理室2から搬出されていく(ステップS10)。
ブラシ配置判断処理は、制御部67によって、前述の洗浄処理時(裏面側洗浄処理の初期段階)に実行される。このブラシ配置判断処理では、ブラシ16が基準位置に適切に配置されたか否かが判断される。
ブラシ16が基準位置に配置されると、ブラシ16の第2洗浄面29にウエハWが微小な所定量だけ食い込み、ブラシ16がウエハWの裏面から鉛直下向きの反力を受けるので、その前後でブラシ16に対して鉛直方向に加わる荷重が変化する。
一方、ブラシ16の基準位置への移動が完了した時点で、ブラシ16に加わる鉛直方向の荷重が初期荷重から所定量以上変化していなければ(ステップS13のNO)、制御部67により、ブラシ16が基準位置に正常に配置されていないと判断される。この場合、その旨の警報が出力される(ステップS15)。警報出力後は、たとえば、洗浄処理が直ちに終了されてもよいし、処理中のウエハWに対する洗浄処理が終了まで続けられてもよい。
荷重監視処理は、前述の裏面側洗浄処理および表面側洗浄処理中に、制御部67により実行される。
この荷重監視処理では、圧力センサ65の出力が参照されて、ブラシ16に加わる鉛直方向の荷重が取得される。そして、その荷重が所定荷重範囲内であるか否かが判断される(ステップS21)。
一方、裏面側洗浄処理中に、ブラシ16に加わる鉛直方向の荷重が所定範囲を逸脱すると(ステップS21のNO)、制御部67により、ウエハWの偏心回転などの異常が生じていると判断され、警報が出力される(ステップS23)。警報出力後は、たとえば、裏面側洗浄処理が直ちに終了されてもよいし、処理中のウエハWに対する一連の洗浄処理が終了まで続けられてもよい。
一方、表面側洗浄処理中に、ブラシ16に加わる鉛直方向の荷重が所定範囲を逸脱すると(ステップS21のNO)、制御部67により、ウエハWの偏心回転などの異常が生じていると判断され、警報が出力される(ステップS23)。警報出力後は、たとえば、表面側洗浄処理が直ちに終了されてもよいし、処理中のウエハWに対する一連の洗浄処理が終了まで続けられてもよい。あるいは、ステップS23に代えて(警報を出力することなく)、圧力センサ65により検出される荷重が所定の荷重範囲内に入るように、圧力センサ65からの検出信号に基づいて制御部67が揺動駆動機構18および昇降駆動機構19をフィードバック制御し、ブラシ16の位置を適切な位置に補正するステップとすることもできる。こうすることにより、ウエハWの偏心回転やウエハWの反り変形の有無にかかわらず、ウエハWの周縁部に対してブラシ16を適切に接触させることができる。
なお、基準位置の設定、および洗浄幅−押込量−荷重テーブルの一部の作成は、図12に示すティーチング処理によって自動的に行われてもよい。
ティーチング処理では、たとえば、スピンチャック3にウエハWと同一形状のダミーウエハが保持される。もちろん、ダミーウエハではなく、洗浄処理の対象であるウエハWがスピンチャック3に保持されてもよい。ここでは、ダミーウエハを用いた場合を例にとる。
ブラシ16が移動している間、制御部67により、圧力センサ65の出力が常に参照されて、ブラシ16に加わる鉛直方向の荷重が監視されている。そして、ブラシ16に加わる鉛直方向の荷重が予め定める閾値以上になったか否かが繰り返し調べられる(ステップS33)。ブラシ16がダミーウエハに接触すると、ブラシ16がダミーウエハの裏面からの反力を受けるので、その前後でブラシ16に対して鉛直方向に加わる荷重が変化する。閾値は、そのブラシ16がダミーウエハに接触する前後における荷重の変化量に基づいて設定(たとえば、その荷重の変化量を初期荷重に加えて得られる値に設定)されている。したがって、ブラシ16に加わる鉛直方向の荷重が閾値以上になったことに基づいて、ブラシ16がダミーウエハに接触したと判断することができる。
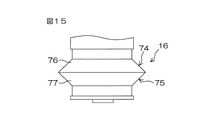
たとえば、図13に示すように、ブラシ16は、第1洗浄部26と第2洗浄部27との間に、円筒状の連結部71を一体的に有していてもよい。この形状のブラシ16が採用される場合、連結部71の周面にウエハWの端面が接触するような位置を基準位置としてもよい。このような基準位置は、ウエハWの周縁部付近でブラシ16を上下動させて、第1洗浄面28および第2洗浄面29にウエハWの周縁部を交互に接触させつつ、ブラシ16をウエハWに近づけていき、ブラシ16に加わる鉛直方向の荷重が初期荷重に一致した時点のブラシ16の位置をメモリ69に記憶させることにより自動的に設定することもできる。
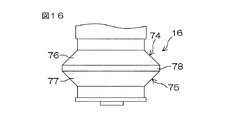
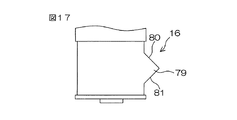
さらにまた、ブラシ16を必ずしも回転させる必要はない。ブラシ16を回転させない構成が採用される場合には、図17に示す形状のブラシ16が採用されてもよい。この図17に示すブラシ16は、水平方向に突出する側面視三角形状の突起部79を有している。突起部79は、図17の紙面に垂直な方向に長く形成され、その上面80および下面81は、それぞれ鉛直方向に対して45度の傾斜角度で傾斜している。このブラシ16では、突起部79の上面80が、ウエハWの裏面の周縁領域14および周端面15を洗浄するための洗浄面として使用され、突起部79の下面81が、ウエハWの表面の周縁領域13および周端面15を洗浄するための洗浄面として使用される。
3 スピンチャック
16 ブラシ
18 揺動駆動機構
19 昇降駆動機構
28 第1洗浄面
29 第2洗浄面
33 荷重付加機構
65 圧力センサ
66 押し圧検出用アーム
67 制御部
68 CPU
69 メモリ
76 側面
77 側面
W ウエハ
Claims (7)
- 基板の周縁部に対する洗浄処理のための基板処理装置であって、
基板を保持する基板保持手段と、
前記基板保持手段に保持された基板の表面に垂直な縦方向に対して傾斜する洗浄面を有するブラシと、
前記ブラシを前記縦方向およびこれと直交する横方向に移動させるためのブラシ移動手段と、
前記ブラシに対して前記縦方向に加わる荷重を検出するための荷重検出手段と、
前記荷重検出手段の出力に基づいて、洗浄処理時に前記ブラシが配置されるべき処理時位置へ前記ブラシを導く際の基準となる基準位置に、前記ブラシが配置されたか否かを判断する第1判断手段と、
前記ブラシが前記基板保持手段に保持された基板と接触していない状態で、前記ブラシに所定の初期荷重を加える初期荷重付加手段とを含み、
前記基準位置は、前記ブラシが当該基準位置に配置された状態で、前記基板保持手段に保持された基板の表面または裏面と周端面とがなす角部が前記洗浄面に所定量だけ食い込むような位置であり、
前記第1判断手段は、前記初期荷重付加手段が前記初期荷重を加えている状態で前記ブラシ移動手段によって前記ブラシが前記基準位置に向けて移動されると、前記荷重検出手段により検出される荷重の前記初期荷重に対する変化量に基づいて、前記ブラシが前記基準位置に配置されたか否かを判断する、基板処理装置。 - 前記ブラシが前記処理時位置に配置されているときに、前記荷重検出手段により検出される荷重が所定の荷重範囲内であるか否かを判断する第2判断手段を含む、請求項1に記載の基板処理装置。
- 前記ブラシ移動手段を制御して、前記ブラシを前記基板保持手段に保持された基板に向けて移動させつつ、前記荷重検出手段の出力を監視し、前記ブラシが当該基板に接触したことにより、前記荷重検出手段により検出される荷重が予め定める閾値を超えたことに応答して、そのときの前記ブラシの位置を前記基準位置に設定する基準位置設定手段を含む、請求項1または2に記載の基板処理装置。
- 前記処理時位置に配置された前記ブラシに対して前記縦方向に加わる荷重を記憶する荷重記憶手段と、
前記ブラシ移動手段を制御して、前記ブラシを前記基準位置から前記処理時位置へ移動させ、前記ブラシが前記処理時位置に配置されたときに前記荷重検出手段により検出される荷重を、前記基準位置から前記処理時位置までの距離と対応づけて、前記荷重記憶手段に記憶させる記憶制御手段とを含む、請求項3に記載の基板処理装置。 - 前記処理時位置は、前記基準位置からの距離が互いに異なる複数の位置に設定されており、
前記処理時位置ごとに、前記基準位置から前記処理時位置までの距離と、当該処理時位置に前記ブラシが配置されたときの基板の表面に対する前記ブラシの接触幅とを対応づけて記憶する接触幅記憶手段を含む、請求項1ないし4のいずれかに記載の基板処理装置。 - 前記洗浄面は、前記縦方向に延びる中心軸線まわりに回転対称な形状を有している、請求項1ないし5のいずれかに記載の基板処理装置。
- 前記洗浄面は、前記縦方向の一方側に向けて狭まる形状の第1部分と、この第1部分の前記一方側の端縁から前記縦方向の前記一方側に向けて拡がる形状の第2部分とを備えている、請求項6に記載の基板処理装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007120078A JP4928343B2 (ja) | 2007-04-27 | 2007-04-27 | 基板処理装置 |
| KR1020080035969A KR100937544B1 (ko) | 2007-04-27 | 2008-04-18 | 기판처리장치 |
| US12/109,059 US8051522B2 (en) | 2007-04-27 | 2008-04-24 | Substrate treatment apparatus |
| TW097115266A TWI366224B (en) | 2007-04-27 | 2008-04-25 | Substrate treatment apparatus |
| CN200810094841.8A CN101295630B (zh) | 2007-04-27 | 2008-04-28 | 基板处理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007120078A JP4928343B2 (ja) | 2007-04-27 | 2007-04-27 | 基板処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008277577A JP2008277577A (ja) | 2008-11-13 |
| JP4928343B2 true JP4928343B2 (ja) | 2012-05-09 |
Family
ID=39885268
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007120078A Active JP4928343B2 (ja) | 2007-04-27 | 2007-04-27 | 基板処理装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8051522B2 (ja) |
| JP (1) | JP4928343B2 (ja) |
| KR (1) | KR100937544B1 (ja) |
| CN (1) | CN101295630B (ja) |
| TW (1) | TWI366224B (ja) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5096849B2 (ja) * | 2007-09-13 | 2012-12-12 | 株式会社Sokudo | 基板処理装置および基板処理方法 |
| JP2009088244A (ja) * | 2007-09-28 | 2009-04-23 | Tokyo Electron Ltd | 基板クリーニング装置、基板処理装置、基板クリーニング方法、基板処理方法及び記憶媒体 |
| US8356376B2 (en) * | 2008-06-18 | 2013-01-22 | Tokyo Electron Limited | Substrate cleaning apparatus, substrate cleaning method, and storage medium |
| JP2010003739A (ja) * | 2008-06-18 | 2010-01-07 | Tokyo Electron Ltd | 基板洗浄装置 |
| TW201039398A (en) * | 2009-04-24 | 2010-11-01 | Inotera Memories Inc | A wafer cleaning equipment and a cleaning method thereof |
| CN103799939A (zh) * | 2012-11-12 | 2014-05-21 | 青岛理工大学琴岛学院 | 迅速清洗设备 |
| US20140310895A1 (en) * | 2013-04-19 | 2014-10-23 | Applied Materials, Inc. | Scrubber brush force control assemblies, apparatus and methods for chemical mechanical polishing |
| TWI636518B (zh) * | 2013-04-23 | 2018-09-21 | 荏原製作所股份有限公司 | 基板處理裝置及處理基板之製造方法 |
| EP2809089B1 (en) | 2013-05-31 | 2016-09-28 | ST-Ericsson SA | Method to determine an appropriate waiting time extension in a listen mode device |
| JP6279276B2 (ja) * | 2013-10-03 | 2018-02-14 | 株式会社荏原製作所 | 基板洗浄装置及び基板処理装置 |
| CN105304523B (zh) * | 2014-07-29 | 2019-12-24 | 盛美半导体设备(上海)有限公司 | 半导体清洗设备的刷子运动装置 |
| JP6386424B2 (ja) * | 2015-08-06 | 2018-09-05 | 東芝メモリ株式会社 | 半導体製造装置および半導体装置の製造方法 |
| JP6751634B2 (ja) * | 2016-09-21 | 2020-09-09 | 株式会社Screenホールディングス | 基板処理装置 |
| CN107758275A (zh) * | 2017-12-01 | 2018-03-06 | 湖北友花茶业科技有限公司 | 带自动扫刷装置的茶叶带式输送机 |
| JP7122192B2 (ja) * | 2018-08-21 | 2022-08-19 | 株式会社Screenホールディングス | 基板処理方法、基板処理装置および基板処理システム |
| CN108971174A (zh) * | 2018-08-30 | 2018-12-11 | 山东淄博汉能薄膜太阳能有限公司 | 清洗装置及方法 |
| CN110095890A (zh) * | 2019-05-05 | 2019-08-06 | 深圳市华星光电半导体显示技术有限公司 | 清洗装置及清洗方法 |
| JP7348021B2 (ja) * | 2019-10-15 | 2023-09-20 | 株式会社荏原製作所 | 基板洗浄装置及び基板洗浄方法 |
| CN111554569A (zh) * | 2020-05-21 | 2020-08-18 | 华海清科股份有限公司 | 一种晶圆清洗装置和晶圆清洗方法 |
| CN111558559A (zh) * | 2020-05-21 | 2020-08-21 | 华海清科股份有限公司 | 一种晶圆清洗装置和晶圆清洗方法 |
| TWI814077B (zh) * | 2020-09-18 | 2023-09-01 | 日商斯庫林集團股份有限公司 | 基板洗淨裝置 |
| JP7653785B2 (ja) * | 2020-12-28 | 2025-03-31 | 株式会社Screenホールディングス | 基板洗浄装置および基板洗浄方法 |
| KR102489796B1 (ko) | 2022-06-15 | 2023-01-18 | 엔씨케이티 주식회사 | 반도체 웨이퍼 세정장비의 브러시 감지장치 및 압력제어방법 |
| JP2024106671A (ja) * | 2023-01-27 | 2024-08-08 | 株式会社Screenホールディングス | 基板処理装置 |
| CN119738075A (zh) * | 2023-09-27 | 2025-04-01 | 盛美半导体设备(上海)股份有限公司 | 压力监测装置、半导体清洗设备及其监测方法 |
| CN118162596B (zh) * | 2024-05-14 | 2024-08-23 | 沂源旭光机械有限公司 | 一种混凝土泵车双层内管离心铸造装置及工艺 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3515825B2 (ja) | 1995-02-03 | 2004-04-05 | 大日本スクリーン製造株式会社 | ブラシ回転式基板洗浄装置 |
| KR0175278B1 (ko) * | 1996-02-13 | 1999-04-01 | 김광호 | 웨이퍼 세정장치 |
| JP2875201B2 (ja) * | 1996-02-19 | 1999-03-31 | 芝浦メカトロニクス株式会社 | 洗浄処理装置およびその方法 |
| US5861066A (en) * | 1996-05-01 | 1999-01-19 | Ontrak Systems, Inc. | Method and apparatus for cleaning edges of contaminated substrates |
| JP3463908B2 (ja) * | 1997-02-17 | 2003-11-05 | 大日本スクリーン製造株式会社 | 基板洗浄方法および基板洗浄装置 |
| JPH11625A (ja) * | 1997-06-13 | 1999-01-06 | Mitsubishi Materials Corp | ウェーハの洗浄装置 |
| JPH11260783A (ja) * | 1998-03-11 | 1999-09-24 | Oki Electric Ind Co Ltd | 基板洗浄装置 |
| US6290780B1 (en) * | 1999-03-19 | 2001-09-18 | Lam Research Corporation | Method and apparatus for processing a wafer |
| KR100436361B1 (ko) * | 2000-12-15 | 2004-06-18 | (주)케이.씨.텍 | 기판 가장자리를 세정하기 위한 장치 |
| JP2002313765A (ja) * | 2001-04-17 | 2002-10-25 | Sony Corp | ブラシ洗浄装置及びその制御方法 |
| JP2003197592A (ja) | 2001-12-27 | 2003-07-11 | Dainippon Screen Mfg Co Ltd | 基板端面洗浄装置および基板処理装置 |
| JP2005317576A (ja) | 2004-04-27 | 2005-11-10 | Nikon Corp | 基板洗浄装置、及び基板洗浄装置における洗浄ブラシの基準位置の決定方法 |
| JP4395012B2 (ja) * | 2004-06-09 | 2010-01-06 | 三菱電機株式会社 | パネル洗浄装置およびパネルの製造方法 |
| JP3933670B2 (ja) * | 2005-03-29 | 2007-06-20 | 東京エレクトロン株式会社 | 基板洗浄方法及び基板洗浄装置 |
| JP4486003B2 (ja) | 2005-07-07 | 2010-06-23 | 大日本スクリーン製造株式会社 | 基板洗浄ブラシ、ならびにこれを用いた基板処理装置および基板処理方法 |
| KR100916687B1 (ko) * | 2006-03-30 | 2009-09-11 | 다이닛뽕스크린 세이조오 가부시키가이샤 | 기판처리장치 및 기판처리방법 |
| JP2007273608A (ja) * | 2006-03-30 | 2007-10-18 | Dainippon Screen Mfg Co Ltd | 基板処理装置および基板処理方法 |
| KR100892809B1 (ko) * | 2006-03-30 | 2009-04-10 | 다이닛뽕스크린 세이조오 가부시키가이샤 | 기판처리장치 및 기판처리방법 |
| JP4451429B2 (ja) | 2006-10-17 | 2010-04-14 | 大日本スクリーン製造株式会社 | 洗浄装置 |
-
2007
- 2007-04-27 JP JP2007120078A patent/JP4928343B2/ja active Active
-
2008
- 2008-04-18 KR KR1020080035969A patent/KR100937544B1/ko active Active
- 2008-04-24 US US12/109,059 patent/US8051522B2/en active Active
- 2008-04-25 TW TW097115266A patent/TWI366224B/zh active
- 2008-04-28 CN CN200810094841.8A patent/CN101295630B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| TW200901295A (en) | 2009-01-01 |
| CN101295630B (zh) | 2010-07-14 |
| KR100937544B1 (ko) | 2010-01-19 |
| CN101295630A (zh) | 2008-10-29 |
| TWI366224B (en) | 2012-06-11 |
| KR20080096394A (ko) | 2008-10-30 |
| JP2008277577A (ja) | 2008-11-13 |
| US20080263793A1 (en) | 2008-10-30 |
| US8051522B2 (en) | 2011-11-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4928343B2 (ja) | 基板処理装置 | |
| JP4719051B2 (ja) | 基板処理装置および基板処理方法 | |
| US7979942B2 (en) | Substrate treatment apparatus and substrate treatment method | |
| JP5009253B2 (ja) | 基板洗浄装置 | |
| KR20150109260A (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| US20250079220A1 (en) | Substrate processing apparatus and substrate processing method | |
| KR20100013124A (ko) | 기판 처리 장치 | |
| JP5031525B2 (ja) | 基板処理装置 | |
| KR102114430B1 (ko) | 기판 세정 장치 및 기판 세정 방법 | |
| JP4719052B2 (ja) | 基板処理装置および基板処理方法 | |
| TWI654036B (zh) | Substrate processing method, substrate processing apparatus, and recording medium | |
| JP2009206360A (ja) | 基板処理装置 | |
| JP2007294490A (ja) | 基板の洗浄装置およびこれを用いた基板の洗浄方法 | |
| KR102779463B1 (ko) | 기판 처리 장치 및 브러시의 탈락 검지 방법 | |
| JP2009059795A (ja) | 基板処理装置および基板処理方法 | |
| TWI885447B (zh) | 基板處理裝置及基板處理方法 | |
| JP7541938B2 (ja) | 基板処理装置、基板処理方法及びコンピュータ読み取り可能な記録媒体 | |
| KR102643412B1 (ko) | 기판 처리 방법 | |
| KR102893281B1 (ko) | 기판 처리 장치, 기판 처리 방법 및 컴퓨터 판독 가능한 기록 매체 | |
| JP2024064209A (ja) | ブラシ及びそれを備えた基板処理装置並びにブラシの押し圧制御方法 | |
| JP2012222240A (ja) | 基板保持装置、基板処理装置、基板処理方法、及び基板処理プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP2024045835A (ja) | ウェーハ洗浄装置 | |
| JP2025157779A (ja) | 基板処理装置及び基板処理方法 | |
| KR20070070901A (ko) | 반도체 소자 제조용 장비 및 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101028 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110825 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120202 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120210 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150217 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4928343 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |