JP4827441B2 - 振動波アクチュエータ - Google Patents
振動波アクチュエータ Download PDFInfo
- Publication number
- JP4827441B2 JP4827441B2 JP2005161799A JP2005161799A JP4827441B2 JP 4827441 B2 JP4827441 B2 JP 4827441B2 JP 2005161799 A JP2005161799 A JP 2005161799A JP 2005161799 A JP2005161799 A JP 2005161799A JP 4827441 B2 JP4827441 B2 JP 4827441B2
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- mechanical energy
- electro
- energy conversion
- electrode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 39
- 238000006243 chemical reaction Methods 0.000 claims description 22
- 230000000750 progressive effect Effects 0.000 claims description 4
- 238000006073 displacement reaction Methods 0.000 claims description 2
- 230000002194 synthesizing effect Effects 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 8
- 230000010287 polarization Effects 0.000 description 8
- 238000013459 approach Methods 0.000 description 5
- 230000003111 delayed effect Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 2
- 239000012212 insulator Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 1
Images





Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/14—Drive circuits; Control arrangements or methods
- H02N2/142—Small signal circuits; Means for controlling position or derived quantities, e.g. speed, torque, starting, stopping, reversing
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/16—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors using travelling waves, i.e. Rayleigh surface waves
- H02N2/163—Motors with ring stator
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/50—Piezoelectric or electrostrictive devices having a stacked or multilayer structure
- H10N30/503—Piezoelectric or electrostrictive devices having a stacked or multilayer structure with non-rectangular cross-section orthogonal to the stacking direction, e.g. polygonal, circular
- H10N30/505—Annular cross-section
Description
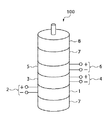
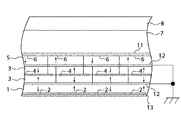
2,4,6,12 電極
7 弾性体
8 移動体
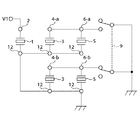
9 スイッチ
11 絶縁体
13 給電手段
14 配線手段
Claims (6)
- 弾性体上に2つの位置的に位相のずれた定在波を時間的に位相をずらして励振することにより発生する進行波によって、該弾性体に加圧接触する移動体を駆動する振動波アクチュエータにおいて、
単相の印加電圧が駆動回路から印加されることにより第1定在波を形成する第1電気−機械エネルギー変換手段と、
前記第1定在波の振動に応じて振動検出電圧を出力する第2電気−機械エネルギー変換手段と、
該振動検出電圧が入力されることで第2定在波を形成する第3電気−機械エネルギー変換手段とを有し、
前記振動検出電圧は、前記第1電気−機械エネルギー変換手段と前記第3電気−機械エネルギー変換手段のうち、前記第3電気−機械エネルギー変換手段にのみ印加され、
前記第1定在波と前記第2定在波を合成することで前記進行波を発生することを特徴とする振動波アクチュエータ。 - 前記振動検出電圧は、増幅されずに前記第3電気−機械エネルギー変換手段に入力されることを特徴とする請求項1に記載の振動波アクチュエータ。
- 前記第2電気−機械エネルギー変換手段と前記第3電気−機械エネルギー変換手段との間に前記振動検出電圧の位相を調整する位相調整手段を備えることを特徴とする請求項1または2に記載の振動波アクチュエータ。
- 前記第2電気−機械エネルギー変換手段は極性の異なる2つの振動検出電圧を出力することを特徴とする請求項1乃至3のいずれか1項記載の振動波アクチュエータ。
- 前記第3電気−機械エネルギー変換手段に極性の異なる2つの振動検出電圧が入力されることを特徴とする請求項1乃至4のいずれか1項記載の振動波アクチュエータ。
- 前記第2電気−機械エネルギー変換手段は、並列に接続された第1及び第2電気−機械エネルギー変換セットを備え、
前記第3電気−機械エネルギー変換手段は、並列に接続された第3及び第4電気−機械エネルギー変換セットを備え、
前記第1電気−機械エネルギー変換セット及び前記第3電気−機械エネルギー変換セットと、前記第2電気−機械エネルギー変換セット及び前記第4電気−機械エネルギー変換セットとのいずれか一方を選択して接地する選択手段を有する請求項1乃至5のいずれか1項記載の振動波アクチュエータ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005161799A JP4827441B2 (ja) | 2005-06-01 | 2005-06-01 | 振動波アクチュエータ |
| US11/441,909 US7321182B2 (en) | 2005-06-01 | 2006-05-26 | Oscillatory-wave actuator and method for driving oscillatory-wave actuator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005161799A JP4827441B2 (ja) | 2005-06-01 | 2005-06-01 | 振動波アクチュエータ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006340493A JP2006340493A (ja) | 2006-12-14 |
| JP2006340493A5 JP2006340493A5 (ja) | 2008-07-17 |
| JP4827441B2 true JP4827441B2 (ja) | 2011-11-30 |
Family
ID=37493477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005161799A Expired - Fee Related JP4827441B2 (ja) | 2005-06-01 | 2005-06-01 | 振動波アクチュエータ |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7321182B2 (ja) |
| JP (1) | JP4827441B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5277010B2 (ja) * | 2009-02-09 | 2013-08-28 | パナソニック株式会社 | 駆動装置 |
| KR101250798B1 (ko) * | 2009-10-27 | 2013-04-04 | 주식회사 로브 | 자기-진동 증폭 기능을 갖는 구조로 된 압전진동장치 및 이를 진동수단으로 채용한 전기/전자기기 |
| CN103973154B (zh) | 2013-01-28 | 2016-07-06 | 北京大学科技开发部 | 一种单摩擦表面微型发电机及其制造方法 |
| CN104868777B (zh) * | 2014-02-20 | 2019-12-06 | 北京纳米能源与系统研究所 | 一种摩擦纳米发电机、发电机组和发电方法 |
| CN104022681B (zh) * | 2014-06-25 | 2016-08-17 | 哈尔滨工业大学 | 夹持式四足纵弯复合超声电机振子 |
| JP2018107437A (ja) * | 2016-12-27 | 2018-07-05 | キヤノン株式会社 | 振動子、振動波駆動装置、振動波モータおよび電子機器 |
| CN106505908B (zh) * | 2017-01-05 | 2018-06-12 | 南京工程学院 | 一种可双向旋转的单相超声波电机 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59204477A (ja) * | 1983-05-04 | 1984-11-19 | Nippon Kogaku Kk <Nikon> | 超音波モーターの駆動制御回路 |
| US4727276A (en) * | 1985-03-26 | 1988-02-23 | Canon Kabushiki Kaisha | Driving circuit for vibration wave motor |
| JPH078153B2 (ja) * | 1986-07-14 | 1995-01-30 | キヤノン株式会社 | 振動波モーター装置 |
| JP2589698B2 (ja) * | 1987-07-03 | 1997-03-12 | キヤノン株式会社 | 振動型アクチュエータ装置 |
| US5134348A (en) * | 1989-04-07 | 1992-07-28 | Canon Kabushiki Kaisha | Vibration wave motor |
| US5191688A (en) * | 1989-07-27 | 1993-03-09 | Olympus Optical Co., Ltd. | Method for producing a superior longitudinal vibrator |
| US5233274A (en) * | 1990-11-30 | 1993-08-03 | Asmo Co., Ltd. | Drive circuit for langevin type ultrasonic bolt-tightening motor |
| JP3109870B2 (ja) | 1991-09-27 | 2000-11-20 | キヤノン株式会社 | ビデオカメラ |
| US5606390A (en) * | 1991-09-27 | 1997-02-25 | Canon Kabushiki Kaisha | Visual-line detecting device and optical apparatus having the same |
| JPH05284764A (ja) | 1992-03-31 | 1993-10-29 | Seiko Instr Inc | 圧電トランスを利用した超音波アクチュエータ装置 |
| JPH07170768A (ja) * | 1993-12-14 | 1995-07-04 | Nikon Corp | 超音波モータ |
| JPH08116685A (ja) * | 1994-10-17 | 1996-05-07 | Canon Inc | 振動波モータ |
| US6072266A (en) * | 1994-12-21 | 2000-06-06 | Nikon Corporation | Vibration actuator |
| US5665918A (en) * | 1994-12-26 | 1997-09-09 | Canon Kabushiki Kaisha | Linear vibration actuator utilizing combined bending and longitudinal vibration modes |
| JPH0937574A (ja) * | 1995-05-12 | 1997-02-07 | Nikon Corp | 振動アクチュエータ及びその制御方法 |
| JPH08317672A (ja) * | 1995-05-17 | 1996-11-29 | Asmo Co Ltd | 超音波モータ装置 |
| US6084363A (en) * | 1997-01-17 | 2000-07-04 | Minolta Co., Ltd. | Drive pulse generating apparatus for drive device using electromechanical transducer |
| JP2001238473A (ja) * | 2000-02-23 | 2001-08-31 | Minolta Co Ltd | 弾性表面波モータ |
| JP4499877B2 (ja) * | 2000-06-13 | 2010-07-07 | セイコーインスツル株式会社 | 超音波モータおよび超音波モータ付き電子機器 |
| JP2002362250A (ja) * | 2001-06-01 | 2002-12-18 | Nippon Pop Rivets & Fasteners Ltd | モール取付装置及びモールクリップ |
| DE10154526B4 (de) * | 2001-06-12 | 2007-02-08 | Physik Instrumente (Pi) Gmbh & Co | Piezoelektrisches Stellelement |
| JP5037767B2 (ja) * | 2001-09-19 | 2012-10-03 | キヤノン株式会社 | 振動型アクチュエータの制御装置 |
| FR2832563A1 (fr) * | 2001-11-22 | 2003-05-23 | Renault | Dispositif de commande d'un actuateur piezo-electrique ultrasonore pilote electroniquement, et son procede de mise en oeuvre |
| JP2003289681A (ja) * | 2002-03-27 | 2003-10-10 | Canon Inc | 振動型アクチュエータの制御装置 |
| JP4086536B2 (ja) * | 2002-04-18 | 2008-05-14 | キヤノン株式会社 | 振動波駆動装置及びその駆動回路 |
| ITTO20020618A1 (it) * | 2002-07-16 | 2004-01-16 | Fiat Ricerche | Sistema di controllo di attuatori piezoelettrici, particolarmente periniettori di combustibile di motori diesel |
| US7129618B2 (en) * | 2003-03-31 | 2006-10-31 | Canon Kabushiki Kaisha | Control apparatus capable of low-speed driving of vibration type driving apparatus, actuating apparatus using the control apparatus, control method capable of low-speed driving of vibration type driving apparatus, and storage medium storing program including program codes capable of realizing the control method |
| US7119475B2 (en) * | 2003-03-31 | 2006-10-10 | Seiko Epson Corporation | Driving method of piezoelectric actuator, driving apparatus of piezoelectric actuator, electronic watch, electronics, control program of piezoelectric actuator, and storage medium |
-
2005
- 2005-06-01 JP JP2005161799A patent/JP4827441B2/ja not_active Expired - Fee Related
-
2006
- 2006-05-26 US US11/441,909 patent/US7321182B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006340493A (ja) | 2006-12-14 |
| US20060273689A1 (en) | 2006-12-07 |
| US7321182B2 (en) | 2008-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4827441B2 (ja) | 振動波アクチュエータ | |
| US7382080B2 (en) | Piezoelectric ultrasonic motor driver | |
| JP2008043123A (ja) | 超音波モータ及び超音波モータの振動検出方法 | |
| JP5467821B2 (ja) | 振動型アクチュエータ | |
| JP2622128B2 (ja) | 振動波モーター装置 | |
| JP3839898B2 (ja) | 振動型アクチュエータの駆動装置および振動型アクチュエータを駆動源とする装置 | |
| JP3126563B2 (ja) | 振動型モータの駆動装置 | |
| JP2019517767A (ja) | 対角方向に励起可能なアクチュエータプレートを有する超音波モータ | |
| JP6577667B2 (ja) | 圧電トランス | |
| JP5110750B2 (ja) | 振動型アクチュエータの駆動回路 | |
| JP4918122B2 (ja) | 超音波モータ及び超音波モータ付き電子機器 | |
| JP4765405B2 (ja) | 超音波モータ駆動装置 | |
| US20020014812A1 (en) | Actuator using a piezoelectric element | |
| JPS61221584A (ja) | 振動波モ−タの駆動回路 | |
| JP2000166265A (ja) | 振動型アクチュエータ駆動装置 | |
| JP5586253B2 (ja) | 超音波モータ | |
| JP2002142475A (ja) | 振動型アクチュエータの駆動回路 | |
| EP1413043A2 (en) | Driving device for ultrasonic motor | |
| JP2002017094A (ja) | 超音波モータ駆動装置 | |
| JP2010004625A (ja) | 圧電振動子およびその駆動方法 | |
| JP4691752B2 (ja) | 振動アクチュエータの駆動装置 | |
| JP4388273B2 (ja) | 超音波モータ及び超音波モータ付き電子機器 | |
| JP5571521B2 (ja) | 超音波モータおよびその駆動方法 | |
| JPH10155289A (ja) | 振動装置および振動制御装置 | |
| JP4154404B2 (ja) | 振動型アクチュエータおよび振動型アクチュエータ製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20070626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080530 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080530 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110422 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110906 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110913 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140922 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140922 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |