JP4748649B2 - 駆動装置 - Google Patents
駆動装置 Download PDFInfo
- Publication number
- JP4748649B2 JP4748649B2 JP2005118468A JP2005118468A JP4748649B2 JP 4748649 B2 JP4748649 B2 JP 4748649B2 JP 2005118468 A JP2005118468 A JP 2005118468A JP 2005118468 A JP2005118468 A JP 2005118468A JP 4748649 B2 JP4748649 B2 JP 4748649B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic pole
- magnet
- outer magnetic
- stator
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K37/00—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors
- H02K37/10—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type
- H02K37/12—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type with stationary armatures and rotating magnets
- H02K37/14—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K37/16—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type with stationary armatures and rotating magnets with magnets rotating within the armatures having horseshoe armature cores
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/145—Stator cores with salient poles having an annular coil, e.g. of the claw-pole type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/278—Surface mounted magnets; Inset magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/28—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2203/00—Specific aspects not provided for in the other groups of this subclass relating to the windings
- H02K2203/12—Machines characterised by the bobbins for supporting the windings
Description
また、ステータの基部がリードスクリュー軸の軸方向一端部を回転自在に支持し、アングルの保持部がリードスクリュー軸の軸方向一端部を回転自在に支持し、保持部と一体的に形成されるアングルの天板部はステータの第1の外側磁極部および第2の外側磁極部が位置決めされているため、リードスクリュー軸の支持精度は、互いに直接位置決めされるステータとアングルの位置精度だけで決めることができる。
また、リードスクリュー軸の支持精度を決めているアングルに一体的に形成されている天板部と保持部との間にラック支持部材が固定されているので、リードスクリュー軸に対するラック支持部材の位置精度が向上する。
さらに、アングルの天板部はボビンに収容されたマグネットを覆う機能を果たすことで、ボビンの蓋の分だけ駆動装置をリードスクリュー軸の軸方向に小型化することができる。
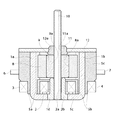
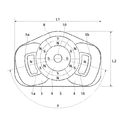
図1は、本発明の第1の実施の形態に係るステッピングモータの構成を示す分解斜視図であり、図2は、ステッピングモータを組み立てた状態における内部構造を示す縦断面図である。
図7は、本発明の第2の実施の形態に係るステッピングモータの構成を示す分解斜視図である。図8は、ステッピングモータを組み立てた状態の外観を示す斜視図である。図9は、ステッピングモータを組み立てた状態における内部構造を示す縦断面図である。
上記第1及び第2の実施の形態では、ステッピングモータ及びリードスクリュー付のステッピングモータについて説明したが、本発明は、上記実施の形態に限定されるものではない。特許請求の範囲で示した機能または上記実施の形態における機能が達成できる構成であれば、どのようなものであってもよいことは言うまでもない。
1a 第1の外側磁極部
1b 第2の外側磁極部
1c 平板部(基部)
2、21 第1の軸受
3 第1のコイル
4 第2のコイル
5 ボビン
5c カバー部
8 マグネット
9 コア
10 回転軸
11、24 第2の軸受
12 天板
22 リードスクリュー軸
23 アングル
26 ラック支持バー(ラック支持部材)
27 ラック
27d 出力部
Claims (4)
- 基部と前記基部から軸方向に延出された第1の外側磁極部および第2の外側磁極部が形成されるステータと、
前記第1の外側磁極部と前記第2の外側磁極部の間に配置され、軟磁性材料からなるロータと、
前記基部に軸方向一端部が回転自在に支持され、前記ロータと一体で回転するリードスクリュー軸と、
前記ロータの外周部に固定され、周方向に異なる極が交互に着磁されたマグネットと、
前記第1の外側磁極部と前記第2の外側磁極部とが係合し、前記マグネットを収容するボビンと、
前記軸方向における前記マグネットと前記基部との間で、前記第1の外側磁極部および前記第2の外側磁極部に、前記ボビンを介してそれぞれ巻回される第1のコイルおよび第2のコイルと、
前記ボビンに収容された前記マグネットを覆う天板部と前記リードスクリュー軸の軸方向他端部を回転自在に支持する保持部とが一体的に形成されるアングルと、
前記リードスクリュー軸に噛合し、前記リードスクリュー軸の回転に伴い軸方向に移動するラックと、
前記アングルの前記天板部と前記保持部との間に固定され、前記ラックを回動可能に支持するラック支持部材とを備え、
前記アングルの前記天板部には、前記第1の外側磁極部が位置決めされる第1の穴部と前記第2の外側磁極部が位置決めされる第2の穴部とが形成されることを特徴とする駆動装置。 - 前記アングルの前記天板部には、前記ボビンの位置決めを行う位置決め部が形成されることを特徴とする請求項1に記載の駆動装置。
- 前記アングルの前記保持部には、前記リードスクリュー軸を前記軸方向に付勢するとともに、前記ラック支持部材の抜け止めを行うバネ部材が取り付けられることを特徴とする請求項1または2に記載の駆動装置。
- 前記ステータの前記基部には、前記リードスクリュー軸の軸方向一端部を支持する第1のベアリングが配置され、前記アングルの前記保持部には、前記リードスクリュー軸の軸方向他端部を支持する第2のベアリングが配置されることを特徴とする請求項1ないし3のいずれか1項に記載の駆動装置。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005118468A JP4748649B2 (ja) | 2005-04-15 | 2005-04-15 | 駆動装置 |
| DE602006001243T DE602006001243D1 (de) | 2005-04-15 | 2006-04-13 | Schrittmotor |
| EP06112640A EP1713166B1 (en) | 2005-04-15 | 2006-04-13 | Stepping motor |
| TW095113226A TWI344741B (en) | 2005-04-15 | 2006-04-13 | Driving device |
| MYPI20061711A MY147616A (en) | 2005-04-15 | 2006-04-13 | Driving device |
| CNA2006100754165A CN1848603A (zh) | 2005-04-15 | 2006-04-14 | 驱动装置 |
| US11/404,625 US7843093B2 (en) | 2005-04-15 | 2006-04-14 | Driving device |
| KR1020060034414A KR100731191B1 (ko) | 2005-04-15 | 2006-04-17 | 구동장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005118468A JP4748649B2 (ja) | 2005-04-15 | 2005-04-15 | 駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006304405A JP2006304405A (ja) | 2006-11-02 |
| JP2006304405A5 JP2006304405A5 (ja) | 2008-05-29 |
| JP4748649B2 true JP4748649B2 (ja) | 2011-08-17 |
Family
ID=36710026
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005118468A Expired - Fee Related JP4748649B2 (ja) | 2005-04-15 | 2005-04-15 | 駆動装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7843093B2 (ja) |
| EP (1) | EP1713166B1 (ja) |
| JP (1) | JP4748649B2 (ja) |
| KR (1) | KR100731191B1 (ja) |
| CN (1) | CN1848603A (ja) |
| DE (1) | DE602006001243D1 (ja) |
| MY (1) | MY147616A (ja) |
| TW (1) | TWI344741B (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101110033B1 (ko) * | 2010-07-01 | 2012-02-29 | 주식회사 모아텍 | 스테핑 모터 |
| TWI649956B (zh) * | 2017-10-19 | 2019-02-01 | 國立成功大學 | 線性串聯彈性致動器 |
| CN109555945A (zh) * | 2018-08-27 | 2019-04-02 | 幻想动力(上海)文化传播有限公司 | 电磁装置、支撑组件及摄影设备 |
| DE102018126690A1 (de) * | 2018-10-25 | 2020-04-30 | Eldat Gmbh | Vorrichtung zur Energiegewinnung zur Verwendung an einer Tür oder einem Fenster sowie Sensor |
| CN111106734A (zh) * | 2019-12-31 | 2020-05-05 | Tcl华星光电技术有限公司 | 一种磁传动机构及清洗设备 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5696873U (ja) * | 1979-12-26 | 1981-07-31 | ||
| JP2508540B2 (ja) | 1987-11-02 | 1996-06-19 | 三菱マテリアル株式会社 | ウェ―ハの位置検出装置 |
| JP2890689B2 (ja) * | 1990-06-14 | 1999-05-17 | 松下電器産業株式会社 | レンズ移動装置 |
| JPH0591191A (ja) | 1991-09-30 | 1993-04-09 | Fujitsu Ltd | 構内ページングシステムにおける回線接続方法 |
| JP3327406B2 (ja) | 1992-01-22 | 2002-09-24 | セイコーエプソン株式会社 | Pm型ステッピングモータ |
| JPH07336938A (ja) | 1994-06-14 | 1995-12-22 | Copal Co Ltd | 可動部材移動装置 |
| JPH08242572A (ja) | 1995-02-28 | 1996-09-17 | Japan Servo Co Ltd | 3相永久磁石式回転電機 |
| JPH08251901A (ja) | 1995-03-03 | 1996-09-27 | Canon Inc | 電磁駆動装置 |
| FR2742940B1 (fr) | 1995-12-22 | 1998-03-13 | Moving Magnet Tech | Moteur diphase, notamment un moteur d'horlogerie ou un moteur pour l'entrainement d'une aiguille d'un afficheur |
| US5831356A (en) * | 1996-04-08 | 1998-11-03 | Canon Kabushiki Kaisha | Compact cylindrical stepping motor and advancing device |
| JP3133270B2 (ja) * | 1996-04-08 | 2001-02-05 | キヤノン株式会社 | モータ及び繰出し装置 |
| US5980194A (en) | 1996-07-15 | 1999-11-09 | Applied Materials, Inc. | Wafer position error detection and correction system |
| US6032512A (en) | 1998-06-02 | 2000-03-07 | Taiwan Semiconductor Manufacturing Co. Ltd. | Wafer centering device and method of using |
| SG90135A1 (en) * | 1999-03-30 | 2002-07-23 | Canon Kk | Motor |
| US6275742B1 (en) | 1999-04-16 | 2001-08-14 | Berkeley Process Control, Inc. | Wafer aligner system |
| US6558509B2 (en) | 1999-11-30 | 2003-05-06 | Applied Materials, Inc. | Dual wafer load lock |
| US6463782B1 (en) | 2000-01-13 | 2002-10-15 | Taiwan Semiconductor Manufacturing Co., Ltd. | Self-centering calibration tool and method of calibrating |
| US6582175B2 (en) | 2000-04-14 | 2003-06-24 | Applied Materials, Inc. | Robot for handling semiconductor wafers |
| JP4388203B2 (ja) * | 2000-05-23 | 2009-12-24 | ミネベア株式会社 | 複合型電磁アクチュエータ装置 |
| US6591066B2 (en) * | 2001-07-06 | 2003-07-08 | Canon Kabushiki Kaisha | Motor and photographing apparatus |
| US6556887B2 (en) | 2001-07-12 | 2003-04-29 | Applied Materials, Inc. | Method for determining a position of a robot |
| US6729824B2 (en) | 2001-12-14 | 2004-05-04 | Applied Materials, Inc. | Dual robot processing system |
| JP4298311B2 (ja) * | 2003-02-07 | 2009-07-15 | キヤノン株式会社 | モータ |
-
2005
- 2005-04-15 JP JP2005118468A patent/JP4748649B2/ja not_active Expired - Fee Related
-
2006
- 2006-04-13 DE DE602006001243T patent/DE602006001243D1/de active Active
- 2006-04-13 TW TW095113226A patent/TWI344741B/zh not_active IP Right Cessation
- 2006-04-13 MY MYPI20061711A patent/MY147616A/en unknown
- 2006-04-13 EP EP06112640A patent/EP1713166B1/en not_active Expired - Fee Related
- 2006-04-14 CN CNA2006100754165A patent/CN1848603A/zh active Pending
- 2006-04-14 US US11/404,625 patent/US7843093B2/en not_active Expired - Fee Related
- 2006-04-17 KR KR1020060034414A patent/KR100731191B1/ko not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| TW200701602A (en) | 2007-01-01 |
| TWI344741B (en) | 2011-07-01 |
| US20060232144A1 (en) | 2006-10-19 |
| EP1713166B1 (en) | 2008-05-21 |
| KR100731191B1 (ko) | 2007-06-22 |
| KR20060109353A (ko) | 2006-10-19 |
| JP2006304405A (ja) | 2006-11-02 |
| CN1848603A (zh) | 2006-10-18 |
| DE602006001243D1 (de) | 2008-07-03 |
| EP1713166A1 (en) | 2006-10-18 |
| US7843093B2 (en) | 2010-11-30 |
| MY147616A (en) | 2012-12-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4738909B2 (ja) | 駆動装置 | |
| JP4748649B2 (ja) | 駆動装置 | |
| JP4298311B2 (ja) | モータ | |
| US7443061B2 (en) | Driving device | |
| JP4748660B2 (ja) | 駆動装置 | |
| JP2005295756A (ja) | モータおよび光学装置 | |
| JP4533024B2 (ja) | 駆動装置及び光量調節装置 | |
| JP4047317B2 (ja) | ステッピングモータ | |
| JP4497884B2 (ja) | 駆動装置 | |
| JP3979037B2 (ja) | ステッピングモータ | |
| JP2007143253A (ja) | ステッピングモータ | |
| JP4533278B2 (ja) | 駆動装置 | |
| JP5171067B2 (ja) | 駆動装置及び光量調節装置 | |
| JP5235330B2 (ja) | モータ | |
| JP4908811B2 (ja) | 駆動装置 | |
| JP4250312B2 (ja) | 駆動伝達装置 | |
| JP2007267542A (ja) | モータ及び駆動装置 | |
| JP2000175429A (ja) | モータ | |
| JP2000175428A (ja) | モータ | |
| JP2006280105A (ja) | 駆動装置 | |
| JP2012249468A (ja) | ハイブリッド型ステッピングモータ | |
| JP2002084721A (ja) | モータ及び該モータを用いる光量制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20070626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080414 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080414 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110318 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110511 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110512 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140527 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |